Control-Based 4D Printing: Adaptive 4D-Printed Systems

 ,
,  ,
,  ,
,  ,
, 
Abstract
:
1. Introduction
2. Controllable 4D-Printed Systems
3. Integration of 3D-printed Sensors into 4D Printing
3.1. Mechanical Motion and Deformation Measurements
3.2. Environmental Measurements
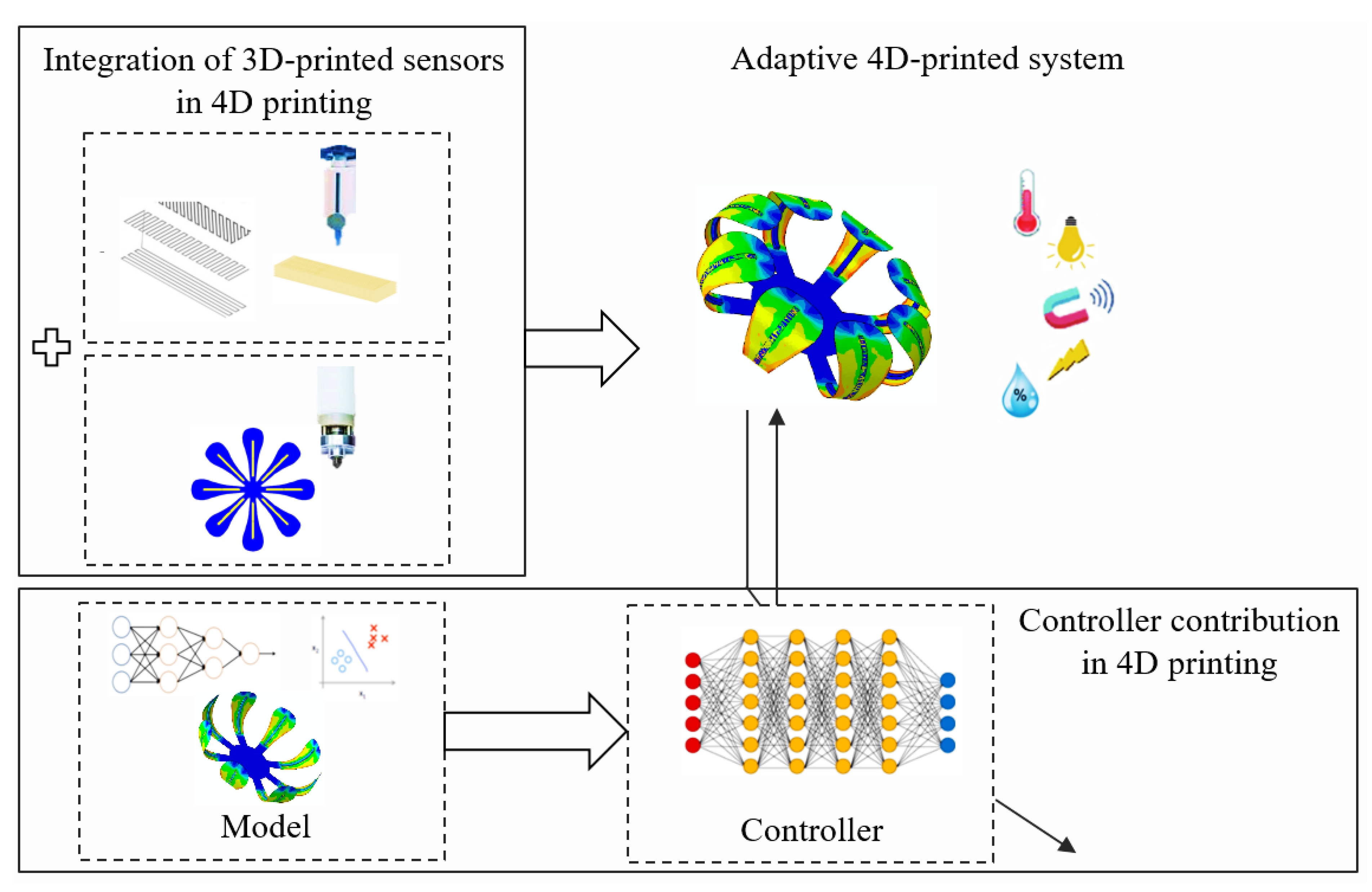
4. Adaptive 4D-Printed Systems Design
5. Discussions and Future Perspectives
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Roach, D.J.; Hamel, C.M.; Dunn, C.K.; Johnson, M.V.; Kuang, X.; Qi, H.J.J.A.M. The m4 3D printer: A multi-material multi-method additive manufacturing platform for future 3D printed structures. Addit. Manuf. 2019, 29, 100819. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Denk, M.; Kouzani, A.Z.; Bodaghi, M.; Nahavandi, S.; Kaynak, A. Effects of Topology Optimization in Multimaterial 3D Bioprinting of Soft Actuators. Int. J. Bioprint. 2020, 6, 1–11. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Gibson, I.; Kaynak, A. 3D printed hydrogel soft actuators. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 2272–2277. [Google Scholar]
- Gul, J.Z.; Sajid, M.; Rehman, M.M.; Siddiqui, G.U.; Shah, I.; Kim, K.H.; Lee, J.W.; Choi, K.H. 3D printing for soft robotics–a review. Sci. Tech. Adv. Mater. 2018, 19, 243–262. [Google Scholar] [CrossRef] [Green Version]
- Miriyev, A.; Stack, K.; Lipson, H. Soft material for soft actuators. Nature Commun. 2017, 8, 596. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Moghadam, A.A.A.; Gibson, I.; Kaynak, A. Evolution of 3D printed soft actuators. Sens. Actuators A Phys. 2016, 250, 258–272. [Google Scholar] [CrossRef]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft somatosensitive actuators via embedded 3D printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, H.; Pusalkar, N.; Ren, H. Single-motor controlled tendon-driven peristaltic soft origami robot. J. Mech. Robot. 2018, 10, 064501. [Google Scholar] [CrossRef] [Green Version]
- Cianchetti, M.; Ranzani, T.; Gerboni, G.; Nanayakkara, T.; Althoefer, K.; Dasgupta, P.; Menciassi, A. Soft robotics technologies to address shortcomings in today's minimally invasive surgery: The STIFF-FLOP approach. Soft Robot. 2014, 1, 122–131. [Google Scholar] [CrossRef]
- Atalay, O.; Atalay, A.; Gafford, J.; Walsh, C. A Highly Sensitive Capacitive-Based Soft Pressure Sensor Based on a Conductive Fabric and a Microporous Dielectric Layer. Adv. Mater. Technol. 2018, 3, 1700237. [Google Scholar] [CrossRef]
- Bhagat, S.; Banerjee, H.; Tse, Z.T.H.; Ren, H. Deep Reinforcement Learning for Soft, Flexible Robots: Brief Review with Impending Challenges. Robotics 2019, 8, 4. [Google Scholar] [CrossRef] [Green Version]
- Tibbits, S. 4D printing: Multi-material shape change. Arch. Des. 2014, 84, 116–121. [Google Scholar] [CrossRef]
- Momeni, F.; Sabzpoushan, S.; Valizadeh, R.; Morad, M.R.; Liu, X.; Ni, J. Plant leaf-mimetic smart wind turbine blades by 4D printing. (in English). Renew. Energ. 2019, 130, 329–351. [Google Scholar] [CrossRef]
- Momeni, F.; Liu, X.; Ni, J. A review of 4D printing. Mater. Des. 2017, 122, 42–79. [Google Scholar] [CrossRef]
- Ota, H.; Emaminejad, S.; Gao, Y.; Zhao, A.; Wu, E.; Challa, S.; Chen, K.; Fahad, H.M.; Jha, A.K.; Kiriya, D.; et al. Application of 3D printing for smart objects with embedded electronic sensors and systems. Adv. Mater. Technol. 2016, 1, 1600013. [Google Scholar] [CrossRef] [Green Version]
- Lopes, A.; Paisana, H.; de Almeida, A.T.; Majidi, C.; Tavakoli, M. Hydroprinted Electronics: Ultrathin Stretchable Ag–In–Ga E-Skin for Bioelectronics and Human–Machine Interaction. ACS Appl. Mater.Interfaces 2018, 10, 38760–38768. [Google Scholar] [CrossRef]
- Espera, A.H.; Dizon, J.R.C.; Chen, Q.; Advincula, R.C. 3D-printing and advanced manufacturing for electronics. Prog. Addit. Manuf. 2019, 4, 245–267. [Google Scholar] [CrossRef]
- Yang, H.; Leow, W.R.; Chen, X. 3D printing of flexible electronic devices. Small Method. 2018, 2, 1700259. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Sun, Q.; Yang, X.; Liang, J.; Koo, A.; Li, W.; Liang, J.; Wang, J.; Li, R.; Holness, F.B.; et al. Toward a remarkable Li-S battery via 3D printing. Nano Energy 2019, 56, 595–603. [Google Scholar] [CrossRef]
- McOwen, D.W.; Xu, S.; Gong, Y.; Wen, Y.; Godbey, G.L.; Gritton, J.E.; Hamann, T.R.; Dai, J.; Hitz, G.T.; Hu, L.; et al. 3D-Printing Electrolytes for Solid-State Batteries. Adv. Mater. 2018, 30, 1707132. [Google Scholar] [CrossRef]
- Gao, X.; Yang, X.; Wang, S.; Sun, Q.; Zhao, C.; Li, X.; Liang, J.; Zheng, M.; Zhao, Y.; Wang, J.; et al. A 3D-printed ultra-high Se loading cathode for high energy density quasi-solid-state Li–Se batteries. J. Mater. Chem. A 2020, 8, 278–286. [Google Scholar] [CrossRef]
- Hendrikson, W.J.; Rouwkema, J.; Clementi, F.; van Blitterswijk, C.A.; Farè, S.; Moroni, L. Towards 4D printed scaffolds for tissue engineering: Exploiting 3D shape memory polymers to deliver time-controlled stimulus on cultured cells. Biofabrication 2017, 9, 031001. [Google Scholar] [CrossRef] [PubMed]
- Miao, S.; Cui, H.; Nowicki, M.; Lee, S.J.; Almeida, J.; Zhou, X.; Zhu, W.; Yao, X.; Masood, F.; Plesniak, M.W.; et al. Photolithographic-stereolithographic-tandem fabrication of 4D smart scaffolds for improved stem cell cardiomyogenic differentiation. Biofabrication 2018, 10, 035007. [Google Scholar] [CrossRef] [PubMed]
- Apsite, I.; Biswas, A.; Li, Y.; Ionov, L. Microfabrication Using Shape-Transforming Soft Materials. Adv. Funct. Mater. 2020, 1908028. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Mooney, D.J. Designing hydrogels for controlled drug delivery. Nature Rev. Mater. 2016, 1, 1–17. [Google Scholar] [CrossRef]
- Noroozi, R.; Bodaghi, M.; Jafari, H.; Zolfagharian, A.; Fotouhi, M. Shape-adaptive metastructures with variable bandgap regions by 4D printing. Polymers 2020, 12, 519. [Google Scholar] [CrossRef] [Green Version]
- Bodaghi, M.; Serjouei, A.; Zolfagharian, A.; Fotouhi, M.; Hafizur, R.; Durand, D. Reversible Energy Absorbing Meta-Sandwiches by FDM 4D Printing. Int. J. Mech. Sci. 2020, 173, 105451. [Google Scholar] [CrossRef] [Green Version]
- d'Eramo, L.; Chollet, B.; Leman, M.; Martwong, E.; Li, M.; Geisler, H.; Dupire, J.; Kerdraon, M.; Vergne, C.; Monti, F.; et al. Microfluidic actuators based on temperature-responsive hydrogels. Microsyst. Nanoeng. 2018, 4, 1–7. [Google Scholar] [CrossRef]
- Shie, M.Y.; Shen, Y.F.; Astuti, S.D.; Lee, A.K.X.; Lin, S.H.; Dwijaksara, N.L.B.; Chen, Y.W. Review of Polymeric Materials in 4D Printing Biomedical Applications. Polymers 2019, 11, 1864. [Google Scholar] [CrossRef] [Green Version]
- Thurgood, P. Self-sufficient microfluidic systems using highly porous elastomeric sponges. Ph.D. Thesis, RMIT University, Melbourne, Australia, 2017. [Google Scholar]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Bodaghi, M.; Noroozi, R.; Zolfagharian, A.; Fotouhi, M.; Norouzi, S. 4D printing self-morphing structures. Materials 2019, 12, 1353. [Google Scholar] [CrossRef] [Green Version]
- Robinson, S.S.; O’Brien, K.W.; Zhao, H.; Peele, B.N.; Larson, C.M.; Mac Murray, B.C.; Van Meerbeek, I.M.; Dunham, S.N.; Shepherd, R.F. Integrated soft sensors and elastomeric actuators for tactile machines with kinesthetic sense. Extreme Mech. Lett. 2015, 5, 47–53. [Google Scholar] [CrossRef] [Green Version]
- Thuruthel, T.G.; Abidi, S.H.; Cianchetti, M.; Laschi, C.; Falotico, E. A bistable soft gripper with mechanically embedded sensing and actuation for fast closed-loop grasping. arXiv 2019, arXiv:1902.04896. [Google Scholar]
- Carrico, J.D.; Traeden, N.W.; Aureli, M.; Leang, K.K. Fused filament 3D printing of ionic polymer-metal composites (IPMCs). Smart Mater. Struct. 2015, 24, 125021. [Google Scholar] [CrossRef]
- Nakshatharan, S.S.; Martinez, J.G.; Punning, A.; Aabloo, A.; Jager, E.W. Soft parallel manipulator fabricated by additive manufacturing. Sens. Actuators B Chem. 2020, 305, 127355. [Google Scholar] [CrossRef]
- Carrico, J.D.; Leang, K.K. Fused filament 3D printing of ionic polymer-metal composites for soft robotics. In Electroactive Polymer Actuators and Devices (EAPAD) 2017; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10163, p. 101630I. [Google Scholar]
- Wang, G.; Cheng, T.; Do, Y.; Yang, H.; Tao, Y.; Gu, J.; An, B.; Yao, L. Printed Paper Actuator: A Low-cost Reversible Actuation and Sensing Method for Shape Changing Interfaces. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Park, J.; Kim, J.-K.; Park, S.A.; Lee, D.-W. Biodegradable polymer material based smart stent: Wireless pressure sensor and 3D printed stent. Microelectron. Eng. 2019, 206, 1–5. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, Q.; Wu, P. A multifunctional skin-like sensor based on a 3D printed thermo-responsive hydrogel. Mater. Horiz. 2017, 4, 694–700. [Google Scholar] [CrossRef]
- Zarek, M.; Mansour, N.; Shapira, S.; Cohn, D. 4D printing of shape memory-based personalized endoluminal medical devices. Macromol. Rapid Commun. 2017, 38, 1600628. [Google Scholar] [CrossRef]
- Gaut, C.; Sugaya, K. Critical review on the physical and mechanical factors involved in tissue engineering of cartilage. Regen. Med. 2015, 10, 665–679. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.; Yoon, S.J.; Park, Y.-L. Soft Inflatable Sensing Modules for Safe and Interactive Robots. IEEE Robot. Auto. Lett. 2018, 3, 3216–3223. [Google Scholar] [CrossRef]
- Han, S.; Kim, T.; Kim, D.; Park, Y.-L.; Jo, S. Use of deep learning for characterization of microfluidic soft sensors. IEEE Robot. Auto. Lett. 2018, 3, 873–880. [Google Scholar] [CrossRef]
- Choi, J.; Kwon, O.-C.; Jo, W.; Lee, H.J.; Moon, M.-W. 4D printing technology: A review. 3D Print. Addit. Manuf. 2015, 2, 159–167. [Google Scholar] [CrossRef]
- de Marco, C.; Pané, S.; Nelson, B.J. 4D printing and robotics. Sci. Robot. 2018, 3, eaau0449. [Google Scholar] [CrossRef]
- López-Valdeolivas, M.; Liu, D.; Broer, D.J.; Sánchez-Somolinos, C. 4D printed actuators with soft-robotic functions. Macromol. Rapid Commun. 2018, 39, 1700710. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Khoo, S.Y.; Kouzani, A.Z. Polyelectrolyte soft actuators: 3D printed chitosan and cast gelatin. 3D Print. Addit. Manuf. 2018, 5, 138–150. [Google Scholar] [CrossRef]
- Saed, M.O.; Ambulo, C.P.; Kim, H.; De, R.; Raval, V.; Searles, K.; Siddiqui, D.A.; Cue, J.M.O.; Stefan, M.C.; Shankar, M.R.; et al. Molecularly-Engineered, 4D-Printed Liquid Crystal Elastomer Actuators. Adv. Funct. Mater. 2018, 29, 1806412. [Google Scholar] [CrossRef]
- Rastogi, P.; Kandasubramanian, B. Breakthrough in the printing tactics for stimuli-responsive materials: 4D printing. Chem. Eng. J. 2019, 366, 264–304. [Google Scholar] [CrossRef]
- Sakhaei, A.H.; Kaijima, S.; Lee, T.L.; Tan, Y.Y.; Dunn, M.L. Design and investigation of a multi-material compliant ratchet-like mechanism. Mech. Mach.Theory 2018, 121, 184–197. [Google Scholar] [CrossRef]
- Rothemund, P.; Ainla, A.; Belding, L.; Preston, D.J.; Kurihara, S.; Suo, Z.; Whitesides, G.M. A soft, bistable valve for autonomous control of soft actuators. Sci. Robot. 2018, 3, eaar7986. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Bilal, O.R.; Shea, K.; Daraio, C. Harnessing bistability for directional propulsion of untethered, soft robots. Proc. Natl. Acad. Sci. USA 2017, 115, 5698–5702. [Google Scholar] [CrossRef] [Green Version]
- Zolfagharian, A.; Kaynak, A.; Khoo, S.Y.; Kouzani, A. Pattern-driven 4D printing. Sens. Actuators A Phys. 2018, 274, 231–243. [Google Scholar] [CrossRef]
- Bodaghi, M.; Damanpack, A.R.; Liao, W.H. Triple shape memory polymers by 4D printing. Smart Mater. Struct. 2018, 27, 065010. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Wang, G.; Xu, Q. Design, Analysis and Testing of a New Compliant Compound Constant-Force Mechanism. Actuators 2018, 7, 65. [Google Scholar] [CrossRef] [Green Version]
- Jeong, H.Y.; Lee, E.; Ha, S.; Kim, N.; Jun, Y.C. Multistable Thermal Actuators Via Multimaterial 4D Printing. Adv. Mater. Tech. 2018, 4, 1800495. [Google Scholar] [CrossRef]
- Bodaghi, M.; Damanpack, A.-R.; Liao, W.-H. Adaptive Metamaterials by Functionally Graded 4D Printing. Mater. Des. 2017, 135, 26–36. [Google Scholar] [CrossRef]
- Chen, T.; Shea, K. An Autonomous Programmable Actuator and Shape Reconfigurable Structures using Bistability and Shape Memory Polymers. 3D Print. Addit. Manuf. 2018, 5, 91–101. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.; Vella, G.; Loh, K.J. Bio-inspired Active Skins for Surface Morphing. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef]
- Mishra, A.K.; Wallin, T.J.; Pan, W.; Xu, P.; Wang, K.; Giannelis, E.P.; Mazzolai, B.; Shepherd, R.F. Autonomic perspiration in 3D-printed hydrogel actuators. Sci. Robot. 2020, 38, eaaz3918. [Google Scholar] [CrossRef]
- Han, D.; Morde, R.S.; Mariani, S.; La Mattina, A.A.; Vignali, E.; Yang, C.; Barillaro, G.; Lee, H. 4D Printing of a Bioinspired Microneedle Array with Backward-Facing Barbs for Enhanced Tissue Adhesion. Adv. Funct. Mater. 2020. [Google Scholar] [CrossRef]
- Taghavi, M.; Helps, T.; Huang, B.; Rossiter, J. 3D-printed ready-to-use variable-stiffness structures. IEEE Robot. Auto. Lett. 2018, 3, 2402–2407. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, Y. Innovative design of embedded pressure and position sensors for soft actuators. IEEE Robot. Auto. Lett. 2018, 3, 656–663. [Google Scholar] [CrossRef]
- Zhou, F.; Zhang, M.; Cao, X.; Zhang, Z.; Chen, X.; Xiao, Y.; Liang, Y.; Wong, T.W.; Li, T.; Xu, Z. Fabrication and modeling of dielectric elastomer soft actuator with 3D printed thermoplastic frame. Sens. Actuators A Phys. 2019, 292, 112–120. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Neumann, G.; Jackson, M.; Lohse, N. Directly Printable Flexible Strain Sensors for Bending and Contact Feedback of Soft Actuators. Front. Robot. AI Commun. 2018, 5, 2. [Google Scholar] [CrossRef] [Green Version]
- Yoshida, K.; Takishima, Y.; Hara, Y.; Kawakami, M.; Furukawa, H. 3D printing for gel robotics. In Nano-, Bio-, Info-Tech Sensors, and 3D Systems II; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; p. 1059717. [Google Scholar]
- Kim, K.; Park, J.; Suh, J.-h.; Kim, M.; Jeong, Y.; Park, I. 3D printing of multiaxial force sensors using carbon nanotube (CNT)/thermoplastic polyurethane (TPU) filaments. Sens. Actuators A Phys. 2017, 263, 493–500. [Google Scholar] [CrossRef]
- Khosravani, M.R.; Reinicke, T. Applications of additive manufacturing in fabrication of sensors—A review. Sens. Actuators A Phys. 2020, 111916. [Google Scholar] [CrossRef]
- Huang, P.; Xia, Z.; Cui, S. 3D printing of carbon fiber-filled conductive silicon rubber. Mater. Des. 2018, 142, 11–21. [Google Scholar] [CrossRef]
- Patel, D.K.; Cohen, B.-E.; Etgar, L.; Magdassi, S. Fully 2D and 3D printed anisotropic mechanoluminescent objects and their application for energy harvesting in the dark. Mater. Horiz. 2018, 5, 708–714. [Google Scholar] [CrossRef]
- van Tiem, J.; Groenesteijn, J.; Sanders, R.; Krijnen, G. 3D printed bio-inspired angular acceleration sensor. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015; pp. 1–4. [Google Scholar]
- He, Y.; Zhou, L.; Zhan, J.; Gao, Q.; Fu, J.; Xie, C.; Zhao, H.; Liu, Y. Three-Dimensional Coprinting of Liquid Metals for Directly Fabricating Stretchable Electronics. 3D Print. Addit. Manuf. 2018, 5, 195–203. [Google Scholar] [CrossRef]
- Lazarus, N.; Bedair, S.S.; Smith, G.L. Creating 3D printed magnetic devices with ferrofluids and liquid metals. Addit. Manuf. 2019, 26, 15–21. [Google Scholar] [CrossRef]
- Scharff, R.B.; Doornbusch, R.M.; Doubrovski, E.L.; Wu, J.; Geraedts, J.M.; Wang, C.C. Color-Based Proprioception of Soft Actuators Interacting With Objects. IEEE/ASME Trans. Mechatron. 2019, 24, 1964–1973. [Google Scholar] [CrossRef] [Green Version]
- Rajala, S.N.K.; Mettänen, M.; Tuukkanen, S. Structural and electrical characterization of solution-processed electrodes for piezoelectric polymer film sensors. IEEE Sens. J. 2015, 16, 1692–1699. [Google Scholar] [CrossRef]
- Kirkpatrick, M.B.; Tarbutton, J.A.; Le, T.; Lee, C. Characterization of 3D printed piezoelectric sensors: Determiniation of d 33 piezoelectric coefficient for 3D printed polyvinylidene fluoride sensors. In Proceedings of the IEEE SENSORS 2016, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Liu, W.; Yan, C. Direct Printing of Stretchable Elastomers for Highly Sensitive Capillary Pressure Sensors. Sensors 2018, 18, 1001. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tseng, T.-L.B.; Akundi, A.; Kim, H. 4-D Printing of Pressure Sensors and Energy Harvesting Devices for Engineering Education. In Proceedings of the 2018 ASEE Annual Conference & Exposition, Tampa, FL, USA, 23 June 2018. [Google Scholar]
- Kim, H.; Torres, F.; Villagran, D.; Stewart, C.; Lin, Y.; Tseng, T.L.B. 3D printing of BaTiO3/PVDF composites with electric in situ poling for pressure sensor applications. Macromol. Mater. Eng. 2017, 302, 1700229. [Google Scholar] [CrossRef]
- Nag, A.; Feng, S.; Mukhopadhyay, S.; Kosel, J.; Inglis, D. 3D printed mould-based graphite/PDMS sensor for low-force applications. Sens.Actuators A Phys. 2018, 280, 525–534. [Google Scholar] [CrossRef]
- Lin, Y.-K.; Hsieh, T.-S.; Tsai, L.; Wang, S.-H.; Chiang, C.-C. Using three-dimensional printing technology to produce a novel optical fiber bragg grating pressure sensor. Sens. Mater. Corros. 2016, 28, 389–394. [Google Scholar]
- Singh, D.; Tawk, C.; Mutlu, R.; Sariyildiz, E.; Alici, G. A 3D Printed Soft Robotic Monolithic Unit for Haptic Feedback Devices. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 388–393. [Google Scholar]
- Shemelya, C.; Cedillos, F.; Aguilera, E.; Maestas, E.; Ramos, J.; Espalin, D.; Muse, D.; Wicker, R.; MacDonald, E. 3D printed capacitive sensors. In Proceedings of the IEEE SENSORS, Baltimore, MD, USA, 4–6 November 2013; pp. 1–4. [Google Scholar]
- Li, K.; Wei, H.; Liu, W.; Meng, H.; Zhang, P.; Yan, C. 3D printed stretchable capacitive sensors for highly sensitive tactile and electrochemical sensing. Nanotechnology 2018, 29, 185501. [Google Scholar] [CrossRef]
- Mousavi, S.; Howard, D.; Wu, S.; Wang, C. An Ultrasensitive 3D Printed Tactile Sensor for Soft Robotics. arXiv 2018, arXiv:1810.09236. [Google Scholar]
- Guo, S.Z.; Qiu, K.; Meng, F.; Park, S.H.; McAlpine, M.C. 3D printed stretchable tactile sensors. Adv. Mater. 2017, 29, 1701218. [Google Scholar] [CrossRef]
- Maldonado, N.; Vegas, V.G.; Halevi, O.; Martínez, J.I.; Lee, P.S.; Magdassi, S.; Wharmby, M.T.; Platero-Prats, A.E.; Moreno, C.; Zamora, F.; et al. 3D Printing of a Thermo-and Solvatochromic Composite Material Based on a Cu (II)–Thymine Coordination Polymer with Moisture Sensing Capabilities. Adv. Funct. Mater. 2019, 29, 1808424. [Google Scholar] [CrossRef]
- Marasso, S.L.; Cocuzza, M.; Bertana, V.; Perrucci, F.; Tommasi, A.; Ferrero, S.; Scaltrito, L.; Pirri, C.F. PLA conductive filament for 3D printed smart sensing applications. Rapid Prototyp. J. 2018, 24, 739–743. [Google Scholar] [CrossRef]
- Palenzuela, C.L.M.; Novotný, F.; Krupička, P.; Sofer, Z.K.; Pumera, M. 3D-printed graphene/polylactic acid electrodes promise high sensitivity in electroanalysis. Anal. Chem. 2018, 90, 5753–5757. [Google Scholar] [CrossRef]
- Gaál, G.; da Silva, T.A.; Gaál, V.; Hensel, R.C.; Amaral, L.R.; Rodrigues, V.; Riul, A., Jr. 3D printed e-tongue. Front. Chem. 2018, 6, 151. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, Z.C.; Christ, J.F.; Evans, K.A.; Arey, B.W.; Sweet, L.E.; Warner, M.G.; Erikson, R.L.; Barrett, C.A. 3D-printed poly (vinylidene fluoride)/carbon nanotube composites as a tunable, low-cost chemical vapour sensing platform. Nanoscale 2017, 9, 5458–5466. [Google Scholar] [CrossRef] [PubMed]
- Naficy, S.; Oveissi, F.; Patrick, B.; Schindeler, A.; Dehghani, F. Printed, Flexible pH Sensor Hydrogels for Wet Environments. Adv. Mater. Technol. 2018, 3, 1800137. [Google Scholar] [CrossRef]
- Michelini, E.; Calabretta, M.M.; Cevenini, L.; Lopreside, A.; Southworth, T.; Fontaine, D.M.; Simoni, P.; Branchini, B.R.; Roda, A. Smartphone-based multicolor bioluminescent 3D spheroid biosensors for monitoring inflammatory activity. Biosens. Bioelectron. 2019, 123, 269–277. [Google Scholar] [CrossRef]
- Mandon, C.l.A.; Blum, L.J.; Marquette, C.A. Adding biomolecular recognition capability to 3D printed objects. Anal. Chem. 2016, 88, 10767–10772. [Google Scholar] [CrossRef] [PubMed]
- Lind, J.U.; Busbee, T.A.; Valentine, A.D.; Pasqualini, F.S.; Yuan, H.; Yadid, M.; Park, S.J.; Kotikian, A.; Nesmith, A.P.; Campbell, P.H.; et al. Instrumented cardiac microphysiological devices via multimaterial three-dimensional printing. Nature Mater. 2017, 16, 303–308. [Google Scholar] [CrossRef] [PubMed]
- Scordo, G.; Moscone, D.; Palleschi, G.; Arduini, F. A reagent-free paper-based sensor embedded in a 3D printing device for cholinesterase activity measurement in serum. Sens. Actuators B Chem. 2018, 258, 1015–1021. [Google Scholar] [CrossRef]
- Ni, Y.; Ji, R.; Long, K.; Bu, T.; Chen, K.; Zhuang, S. A review of 3D-printed sensors. Appl. Spectrosc. Rev. 2017, 52, 623–652. [Google Scholar] [CrossRef]
- Laszczak, P.; Jiang, L.; Bader, D.L.; Moser, D.; Zahedi, S. Development and validation of a 3D-printed interfacial stress sensor for prosthetic applications. Med. Eng. Phys. 2015, 37, 132–137. [Google Scholar] [CrossRef]
- Frutiger, A.; Muth, J.T.; Vogt, D.M.; Mengüç, Y.; Campo, A.; Valentine, A.D.; Walsh, C.J.; Lewis, J.A. Capacitive soft strain sensors via multicore–shell fiber printing. Adv. Mater. 2015, 27, 2440–2446. [Google Scholar] [CrossRef]
- Lorang, D.J.; Tanaka, D.; Spadaccini, C.M.; Rose, K.A.; Cherepy, N.J.; Lewis, J.A. Photocurable liquid core–fugitive shell printing of optical waveguides. Adv. Mater. 2011, 23, 5055–5058. [Google Scholar] [CrossRef] [PubMed]
- Eijking, B.; Sanders, R.; Krijnen, G. Development of whisker inspired 3D multi-material printed flexible tactile sensors. In Proceedings of the 2017 IEEE SENSORS, Paris, France, 21–25 May 2017; pp. 1–3. [Google Scholar]
- Wallin, T.; Pikul, J.; Shepherd, R. 3D printing of soft robotic systems. Nature Rev. Mater. 2018, 3, 84. [Google Scholar] [CrossRef]
- Jeranče, N.; Bednar, N.; Stojanović, G. An ink-jet printed eddy current position sensor. Sensors 2013, 13, 5205–5219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, B.; Meng, L.; Wang, H.; Li, J.; Liu, C. Rapid prototyping eddy current sensors using 3D printing. Rapid Prototyp. J. 2018, 24, 106–113. [Google Scholar] [CrossRef]
- Wolfer, T.; Bollgruen, P.; Mager, D.; Overmeyer, L.; Korvink, J.G. Printing and preparation of integrated optical waveguides for optronic sensor networks. Mechatronics 2016, 34, 119–127. [Google Scholar] [CrossRef]
- Ou, J.; Dublon, G.; Cheng, C.-Y.; Heibeck, F.; Willis, K.; Ishii, H. Cilllia: 3D printed micro-pillar structures for surface texture, actuation and sensing. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; ACM: New York, NY, USA, 2016; pp. 5753–5764. [Google Scholar]
- Raman, R.; Cvetkovic, C.; Bashir, R. A modular approach to the design, fabrication, and characterization of muscle-powered biological machines. Nature Protoc. 2017, 12, 519. [Google Scholar] [CrossRef]
- Stassi, S.; Fantino, E.; Calmo, R.; Chiappone, A.; Gillono, M.; Scaiola, D.; Pirri, C.F.; Ricciardi, C.; Chiadò, A.; Roppolo, I. Polymeric 3D printed functional microcantilevers for biosensing applications. ACS Appl. Mater. Interfac. 2017, 9, 19193–19201. [Google Scholar] [CrossRef]
- Hampson, S.; Rowe, W.; Christie, S.D.; Platt, M. 3D printed microfluidic device with integrated optical sensing for particle analysis. Sens. Actuators B Chem. 2018, 256, 1030–1037. [Google Scholar] [CrossRef] [Green Version]
- Wickberg, A.; Mueller, J.B.; Mange, Y.J.; Fischer, J.; Nann, T.; Wegener, M. Three-dimensional micro-printing of temperature sensors based on up-conversion luminescence. Appl. Phys. Lett. 2015, 106, 133103. [Google Scholar] [CrossRef] [Green Version]
- Zolfagharian, A.; Kaynak, A.; Kouzani, A. Closed-loop 4D-printed soft robots. Mater. Des. 2019, 188, 108411. [Google Scholar] [CrossRef]
- Garces, I.; Ayranci, C. Active control of 4D prints: Towards 4D printed reliable actuators and sensors. Sens. Actuators A Phys. 2020, 301, 111717. [Google Scholar] [CrossRef]
- Della Santina, C.; Katzschmann, R.K.; Biechi, A.; Rus, D. Dynamic control of soft robots interacting with the environment. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Monterey, CA, USA, 23–26 April 2018; pp. 46–53. [Google Scholar]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically exact models for soft robotic manipulators. IEEE Trans. Robot. 2008, 24, 773–780. [Google Scholar] [CrossRef]
- Gravagne, I.A.; Rahn, C.D.; Walker, I.D. Large deflection dynamics and control for planar continuum robots. IEEE/ASME Trans. Mechatron. 2003, 8, 299–307. [Google Scholar] [CrossRef] [Green Version]
- Jones, B.A.; Walker, I.D. Kinematics for multisection continuum robots. IEEE Trans. Robot. 2006, 22, 43–55. [Google Scholar] [CrossRef]
- Ramezani, A.; Chung, S.-J.; Hutchinson, S. A biomimetic robotic platform to study flight specializations of bats. Sci. Robot. 2017, 2, eaal2505. [Google Scholar] [CrossRef] [Green Version]
- Prituja, A.; Banerjee, H.; Ren, H. Electromagnetically Enhanced Soft and Flexible Bend Sensor: A Quantitative Analysis With Different Cores. IEEE Sens. J. 2018, 18, 3580–3589. [Google Scholar] [CrossRef]
- Gillespie, M.T.; Best, C.M.; Townsend, E.C.; Wingate, D.; Killpack, M.D. Learning nonlinear dynamic models of soft robots for model predictive control with neural networks. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Monterey, CA, USA, 23–26 April 2018; pp. 39–45. [Google Scholar]
- Hamel, C.M.; Roach, D.J.; Long, K.N.; Demoly, F.; Dunn, M.L.; Qi, H.J. Machine-learning based design of active composite structures for 4D printing. Smart Mater. Struct. 2019, 28, 065005. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Manti, M.; Laschi, C. Stable open loop control of soft robotic manipulators. J. IEEE Robot. Autom. Lett. 2018, 3, 1292–1298. [Google Scholar] [CrossRef]
- Marchese, A.D.; Tedrake, R.; Rus, D. Dynamics and trajectory optimization for a soft spatial fluidic elastomer manipulator. Int.J. Robot. Res. 2016, 35, 1000–1019. [Google Scholar] [CrossRef]
- Best, C.M.; Gillespie, M.T.; Hyatt, P.; Rupert, L.; Sherrod, V.; Killpack, M.D. A new soft robot control method: Using model predictive control for a pneumatically actuated humanoid. IEEE Robot. Auto. Mag. 2016, 23, 75–84. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kouzani, A.Z.; Maheepala, M.; Khoo, S.Y.; Kaynak, A. Bending Control of a 3D Printed Polyelectrolyte Soft Actuator with Uncertain Model. Sens. Actuators A Phys. 2019, 288, 134–143. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Khoo, S.Y.; Zhang, J.; Nahavandi, S.; Kouzani, A. control-oriented modelling of a 3D-printed soft actuator. Materials 2019, 12, 71. [Google Scholar] [CrossRef] [Green Version]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Learning dynamic models for open loop predictive control of soft robotic manipulators. Bioinspir. Biomim. 2017, 12, 066003. [Google Scholar] [CrossRef] [PubMed]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-Based Reinforcement Learning for Closed-Loop Dynamic Control of Soft Robotic Manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Ansari, Y.; Falotico, E.; Laschi, C. Control Strategies for Soft Robotic Manipulators: A Survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef]
- Della Santina, C.; Bianchi, M.; Grioli, G.; Angelini, F.; Catalano, M.; Garabini, M.; Bicchi, A. Controlling soft robots: Balancing feedback and feedforward elements. IEEE Robot. Autom. Mag. 2017, 24, 75–83. [Google Scholar] [CrossRef] [Green Version]
- Spielberg, S.; Gopaluni, R.; Loewen, P. Deep reinforcement learning approaches for process control. In Proceedings of the 2017 6th International Symposium on Advanced Control of Industrial Processes (AdCONIP), Taipei, Taiwan, 28–31 May 2017; pp. 201–206. [Google Scholar]
- Arel, I.; Rose, D.C.; Karnowski, T. Deep machine learning—A new frontier in artificial intelligence research. IEEE Comput. Intell. Mag. 2010, 5, 13–18. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [Green Version]
- Qi, P.; Liu, C.; Ataka, A.; Lam, H.-K.; Althoefer, K. Kinematic control of continuum manipulators using a fuzzy-model-based approach. IEEE Trans. Ind. Electron. 2016, 63, 5022–5035. [Google Scholar] [CrossRef] [Green Version]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef] [Green Version]
- Larson, C.; Peele, B.; Li, S.; Robinson, S.; Totaro, M.; Beccai, L.; Mazzolai, B.; Shepherd, R. Highly stretchable electroluminescent skin for optical signaling and tactile sensing. Science 2016, 351, 1071–1074. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef]
- Bagnell, J.A. An Invitation to Imitation. Carnegie-Mellon Univ Pittsburgh Pa Robotics Inst, Technical Report. 2015. Available online: https://pdfs.semanticscholar.org/f04d/3ddee335927186b012a1bee765c142ddce57.pdf (accessed on 7 April 2020).
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep learning for visual understanding: A review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Kober, J.; Bagnell, J.A.; Peters, J. Reinforcement learning in robotics: A survey. Int. J. Robot. Res. 2013, 32, 1238–1274. [Google Scholar] [CrossRef] [Green Version]
- López-Martínez, J.; Blanco-Claraco, J.L.; García-Vallejo, D.; Giménez-Fernández, A. Design and analysis of a flexible linkage for robot safe operation in collaborative scenarios. Mech. Mach. Theory 2015, 92, 1–16. [Google Scholar] [CrossRef]
- Koryakovskiy, I.; Kudruss, M.; Babuška, R.; Caarls, W.; Kirches, C.; Mombaur, K.; Schlöder, J.P.; Vallery, H. Benchmarking model-free and model-based optimal control. Robot. Auton. Syst. 2017, 92, 81–90. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Springenberg, J.T.; Boedecker, J.; Burgard, W. Deep reinforcement learning with successor features for navigation across similar environments. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Paris, France, 21–25 May 2017; pp. 2371–2378. [Google Scholar]
- Tai, L.; Paolo, G.; Liu, M. Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Paris, France, 21–25 May 2017; pp. 31–36. [Google Scholar]
- Nasiri, S.; Khosravani, M.R.; Weinberg, K. Fracture mechanics and mechanical fault detection by artificial intelligence methods: A review. Eng. Fail. Anal. 2017, 81, 270–293. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kouzani, A.; Moghadam, A.A.A.; Khoo, S.Y.; Nahavandi, S.; Kaynak, A. Rigid elements dynamics modeling of a 3D printed soft actuator. Smart Mater. Struct. 2018, 28, 025003. [Google Scholar] [CrossRef]
- Largilliere, F.; Verona, V.; Coevoet, E.; Sanz-Lopez, M.; Dequidt, J.; Duriez, C. Real-time control of soft-robots using asynchronous finite element modeling. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Denver, Colorado, 26–30 July 2015; pp. 2550–2555. [Google Scholar]
- Tzeng, E.; Hoffman, J.; Zhang, N.; Saenko, K.; Darrell, T. Deep domain confusion: Maximizing for domain invariance. arXiv 2014, arXiv:1412.3474. [Google Scholar]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Nasri-Nasrabadi, B.; Kaynak, A. Development and analysis of a 3D printed hydrogel soft actuator. Sens. Actuators A Phys. 2017, 265, 94–101. [Google Scholar] [CrossRef]
- Neubauer, J.; Stalbaum, T.; Kim, K.J. IPMC Embedded in a Pneumatic Soft Robotic Actuator: Preliminary Experiments in Actuation and SensingBehaviors. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 80–82. [Google Scholar]
- Liu, J.; Gaynor, A.T.; Chen, S.; Kang, Z.; Suresh, K.; Takezawa, A.; Li, L.; Kato, J.; Tang, J.; Wang, C.C.; et al. Current and future trends in topology optimization for additive manufacturing. Struct. Multidiscip. Optim. 2018, 57, 2457–2483. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.F.; Zhang, N.; Hingorani, H.; Ding, N.; Wang, D.; Yuan, C.; Zhang, B.; Gu, G.; Ge, Q. Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing. J Adv. Funct. Mater. 2019, 29, 1806698. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chen, Y. Principles and methods for stiffness modulation in soft robot design and development. Bio-Des. Manuf. Chem. 2018, 1, 14–25. [Google Scholar] [CrossRef]
- Zheng, G.; Zhou, Y.; Ju, M. Robust control of a silicone soft robot using neural networks. ISA Trans. 2019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tibbits, S. From automated to autonomous assembly. Arch. Des. 2017, 87, 6–15. [Google Scholar] [CrossRef]
- Coevoet, E.; Morales-Bieze, T.; Largilliere, F.; Zhang, Z.; Thieffry, M.; Sanz-Lopez, M.; Carrez, B.; Marchal, D.; Goury, O.; Dequidt, J.; et al. Software toolkit for modeling, simulation, and control of soft robots. Adv. Robot. 2017, 31, 1208–1224. [Google Scholar] [CrossRef]
- Duriez, C.; Coevoet, E.; Largilliere, F.; Morales-Bieze, T.; Zhang, Z.; Sanz-Lopez, M.; Carrez, B.; Marchal, D.; Goury, O.; Dequidt, J. Framework for online simulation of soft robots with optimization-based inverse model. In Proceedings of the IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), Francisco, CA, USA, 13–16 December 2016; pp. 111–118. [Google Scholar]
- Olaya, J.; Pintor, N.; Avilés, O.F.; Chaparro, J. Analysis of 3 RPS Robotic Platform Motion in SimScape and MATLAB GUI Environment. Int. J. Appl. Eng. Res. 2017, 12, 1460–1468. [Google Scholar]
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in soft robotics: A review of the state of the art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar] [CrossRef]
- Duriez, T.; Brunton, S.L.; Noack, B.R. Machine Learning Control-Taming Nonlinear Dynamics and Turbulence; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Zhang, Y.F.; Ng, C.J.X.; Chen, Z.; Zhang, W.; Panjwani, S.; Kowsari, K.; Yang, H.Y.; Ge, Q. Miniature Pneumatic Actuators for Soft Robots by High-Resolution Multimaterial 3D Printing. Adv. Mater. Tech. 2019, 4, 1900427. [Google Scholar] [CrossRef]
- Hines, L.; Petersen, K.; Lum, G.Z.; Sitti, M. Soft actuators for small-scale robotics. Adv. Mater. Technol. 2017, 29, 1603483. [Google Scholar] [CrossRef]
- Odent, J.; Vanderstappen, S.; Toncheva, A.; Pichon, E.; Wallin, T.J.; Wang, K.; Shepherd, R.F.; Dubois, P.; Raquez, J.M. Hierarchical Chemomechanical Encoding of Multi-Responsive Hydrogel Actuators via 3D Printing. J. Mater. Chem. A 2019, 7, 15395–15403. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proprioceptive Feedback | Sensors Type | Mechanisms | 3D Printers | Materials | Applications |
|---|---|---|---|---|---|
| Mechanical Motions and Deformations Measurements | Stress | Capacitive [99] | Extrusion | Ionic gel | Grasping Tracking Holding Manipulation |
| Optical FBG [82] | FDM | ABS | |||
| Piezoelectric [80] | EPAM | PVDF | |||
| Strain | Capacitive [100] | Extrusion | Silicone | ||
| Optical waveguide [101] | FDM | OrmoClear | |||
| Resistive [102] | FDM | TPU | |||
| Displacement | Eddy current [103,104,105] | FDM | ABS/Copper | ||
| Hall effect [72] | FDM | ABS/Magnetite | |||
| Optical waveguide [106] | Inkjet | InkEpo/InOrmo | |||
| Tactile | Piezo-resistive [68] | FDM | TPU/CNT | ||
| Capacitive [107] | FDM | TPU | |||
| Environmental Measurements | Bio | Bioluminescent [94] | FDM | ABS/PLA | Detection Classification Adaptation |
| Electrochemical [108] | SLA | PEGDA | |||
| Vibratory [109] | DLP | Bisphenol | |||
| Chemical | Chemoresistive [92] | FDM | PVDF/MWCNT | ||
| Electrochemical [91] | FDM | PLA/Graphene | |||
| Optical waveguide [110] | SLA | Accura®60 | |||
| Humidity | Solvatochromic [88] | Extrusion | Cu(II)–Thymine | ||
| Temperature | Capacitive [111] | DLW | Nanocrystals |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zolfagharian, A.; Kaynak, A.; Bodaghi, M.; Kouzani, A.Z.; Gharaie, S.; Nahavandi, S. Control-Based 4D Printing: Adaptive 4D-Printed Systems. Appl. Sci. 2020, 10, 3020. https://doi.org/10.3390/app10093020
Zolfagharian A, Kaynak A, Bodaghi M, Kouzani AZ, Gharaie S, Nahavandi S. Control-Based 4D Printing: Adaptive 4D-Printed Systems. Applied Sciences. 2020; 10(9):3020. https://doi.org/10.3390/app10093020
Chicago/Turabian StyleZolfagharian, Ali, Akif Kaynak, Mahdi Bodaghi, Abbas Z. Kouzani, Saleh Gharaie, and Saeid Nahavandi. 2020. "Control-Based 4D Printing: Adaptive 4D-Printed Systems" Applied Sciences 10, no. 9: 3020. https://doi.org/10.3390/app10093020
APA StyleZolfagharian, A., Kaynak, A., Bodaghi, M., Kouzani, A. Z., Gharaie, S., & Nahavandi, S. (2020). Control-Based 4D Printing: Adaptive 4D-Printed Systems. Applied Sciences, 10(9), 3020. https://doi.org/10.3390/app10093020