Optimization Procedure for Computing Sampling Time for Induction Machine Parameter Estimation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Parameter Estimation Problem and System Poles
2.1. Parameter Estimation Procedure
2.2. Determination of the Linear System Poles
3. Optimal Induction Machine Poles and Sampling Time
3.1. Induction Machine Model
3.2. Linearized Induction Machine Model
3.3. Optimal Poles of Induction Machine
3.4. Optimal Sampling Time
3.5. Summary of the Procedure and Computational Complexity
- (1)
- Record the line start transient in voltage oriented reference frame, , with the fastest possible sampling time
- (2)
- Determine the optimal induction machine poles by solving optimization problem (Equation (24)) using the current as the observed variable.
- (3)
- Determine the optimal sampling time factor K by numerical solution of Equation (26), and compute the optimal sampling time .
4. Simulation and Experiment
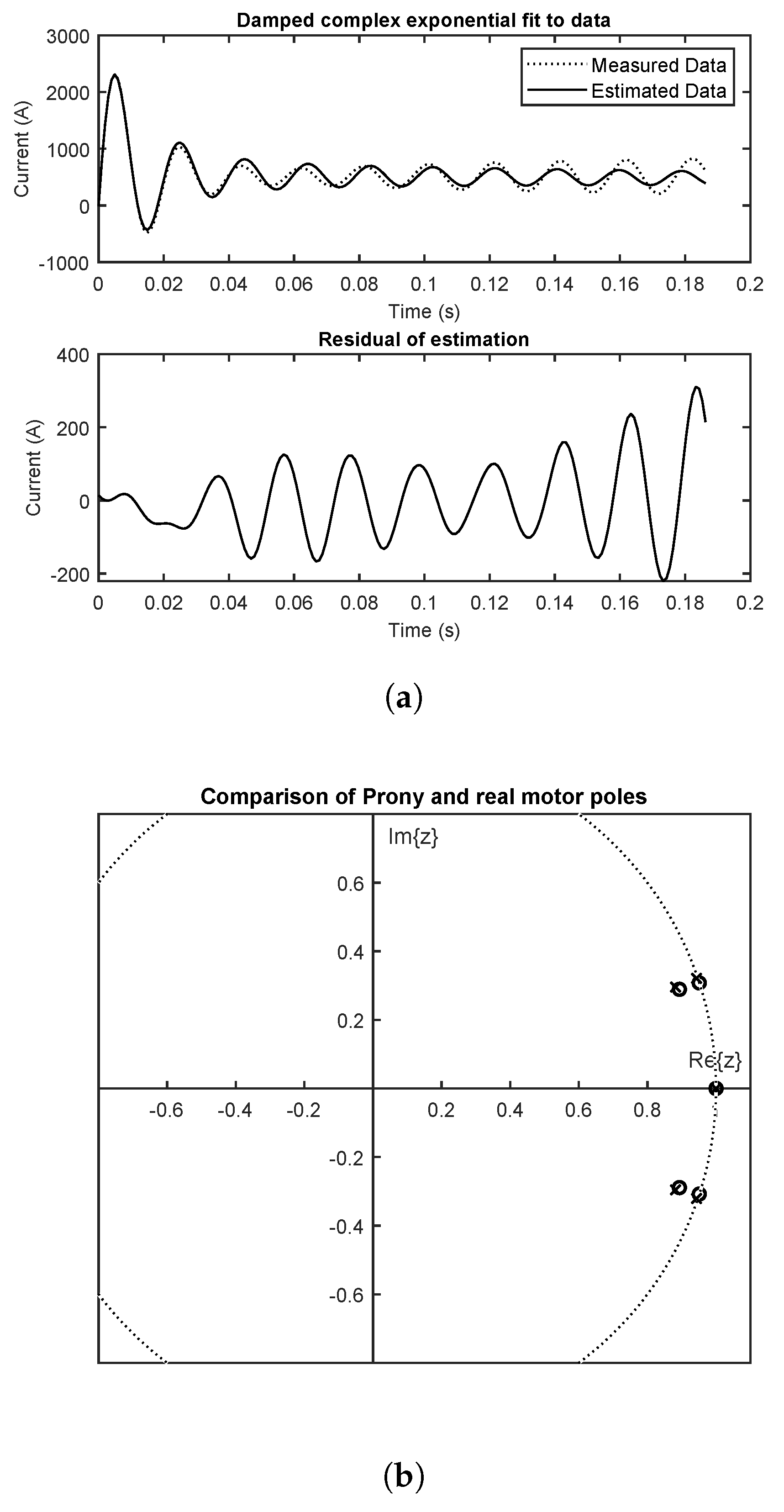
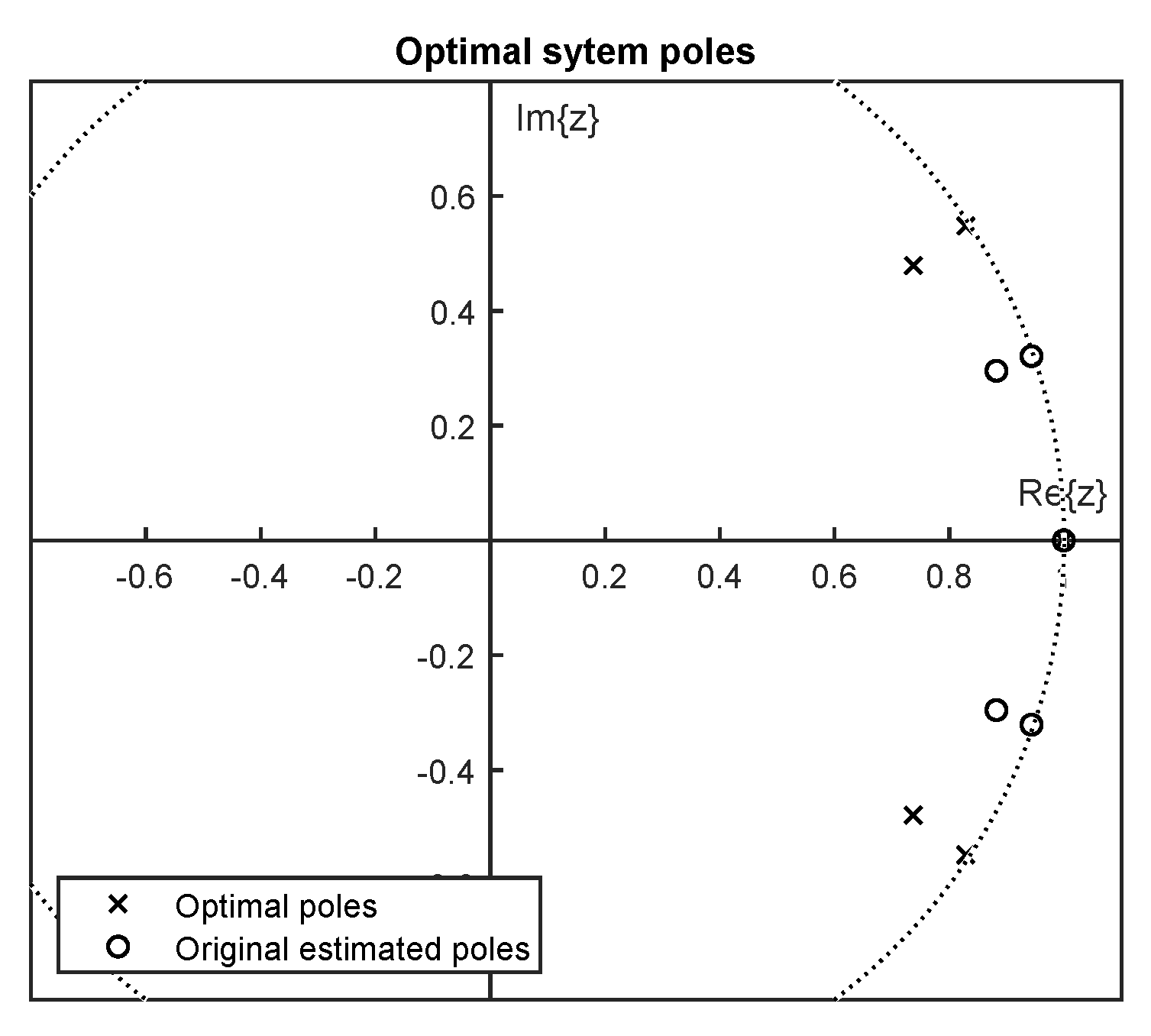
4.1. Application to the Simulated Data
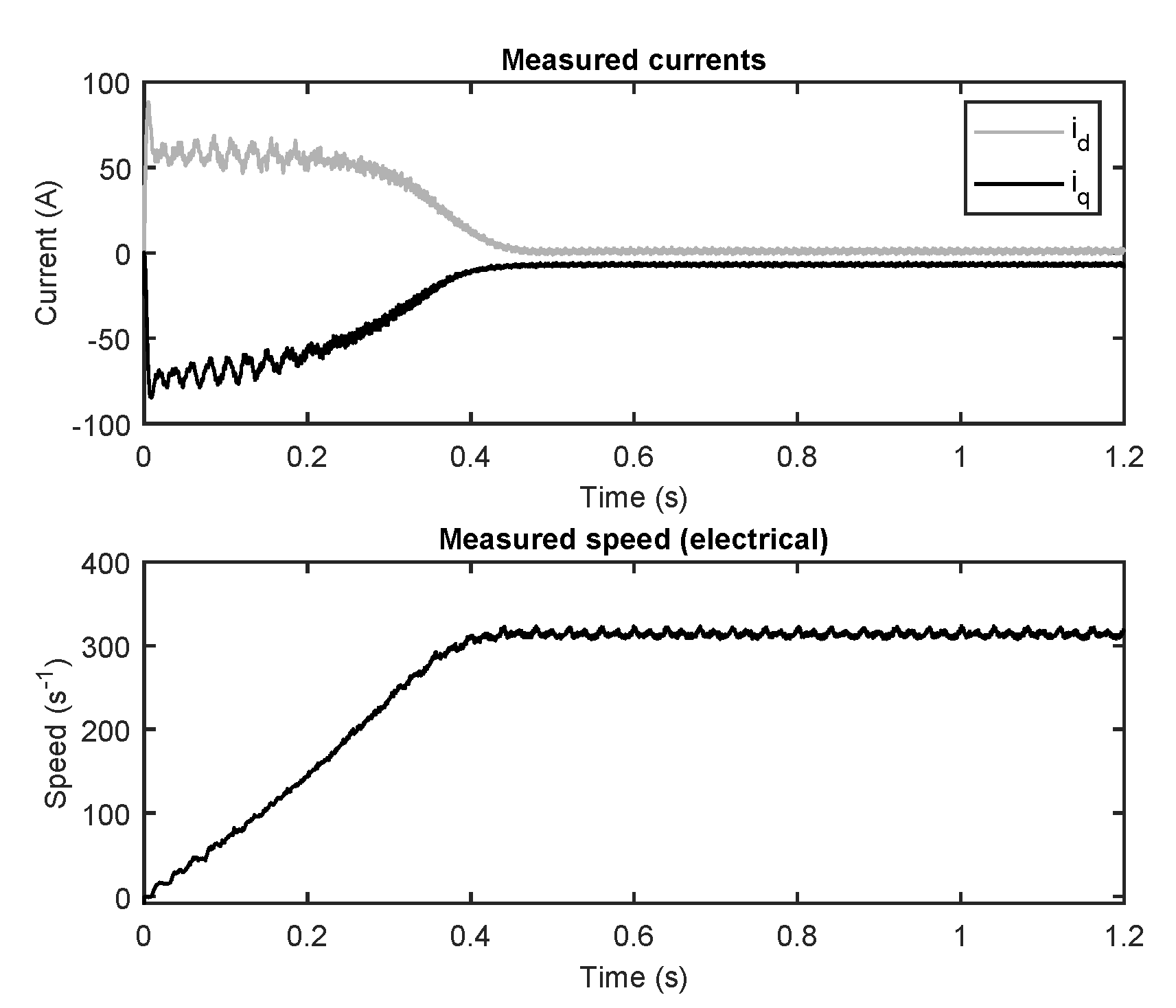
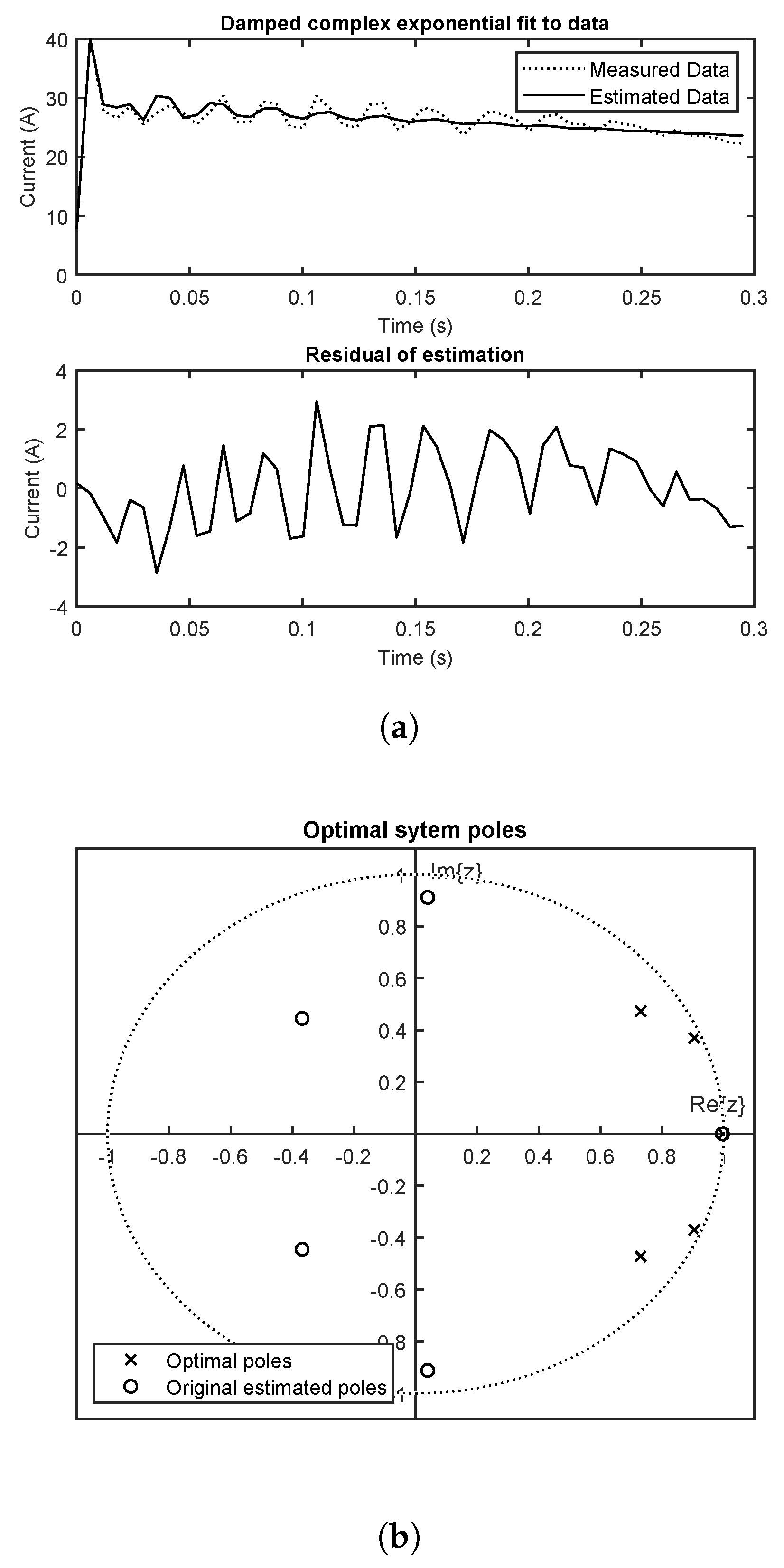
4.2. Application to the Experimental Data
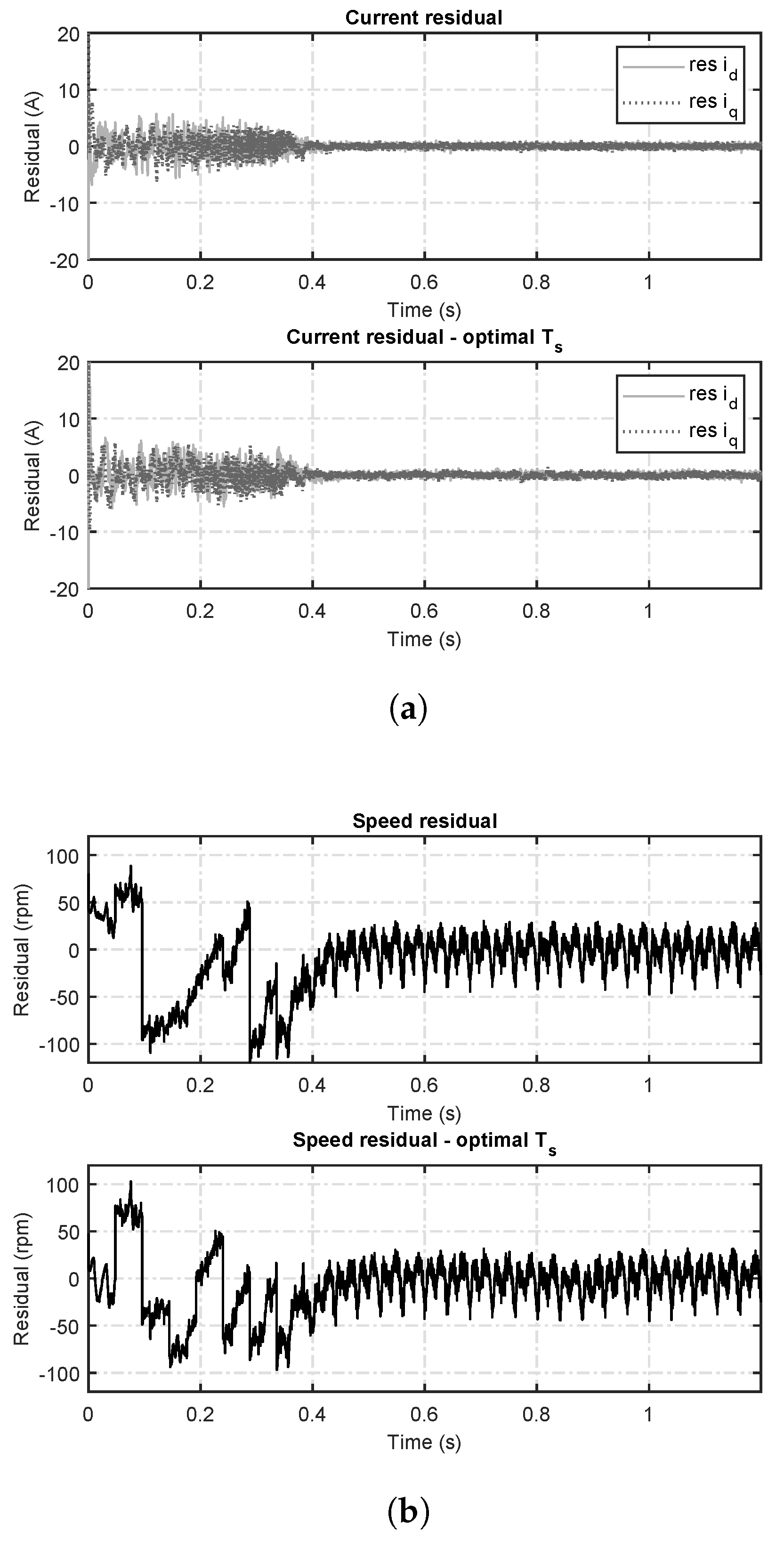
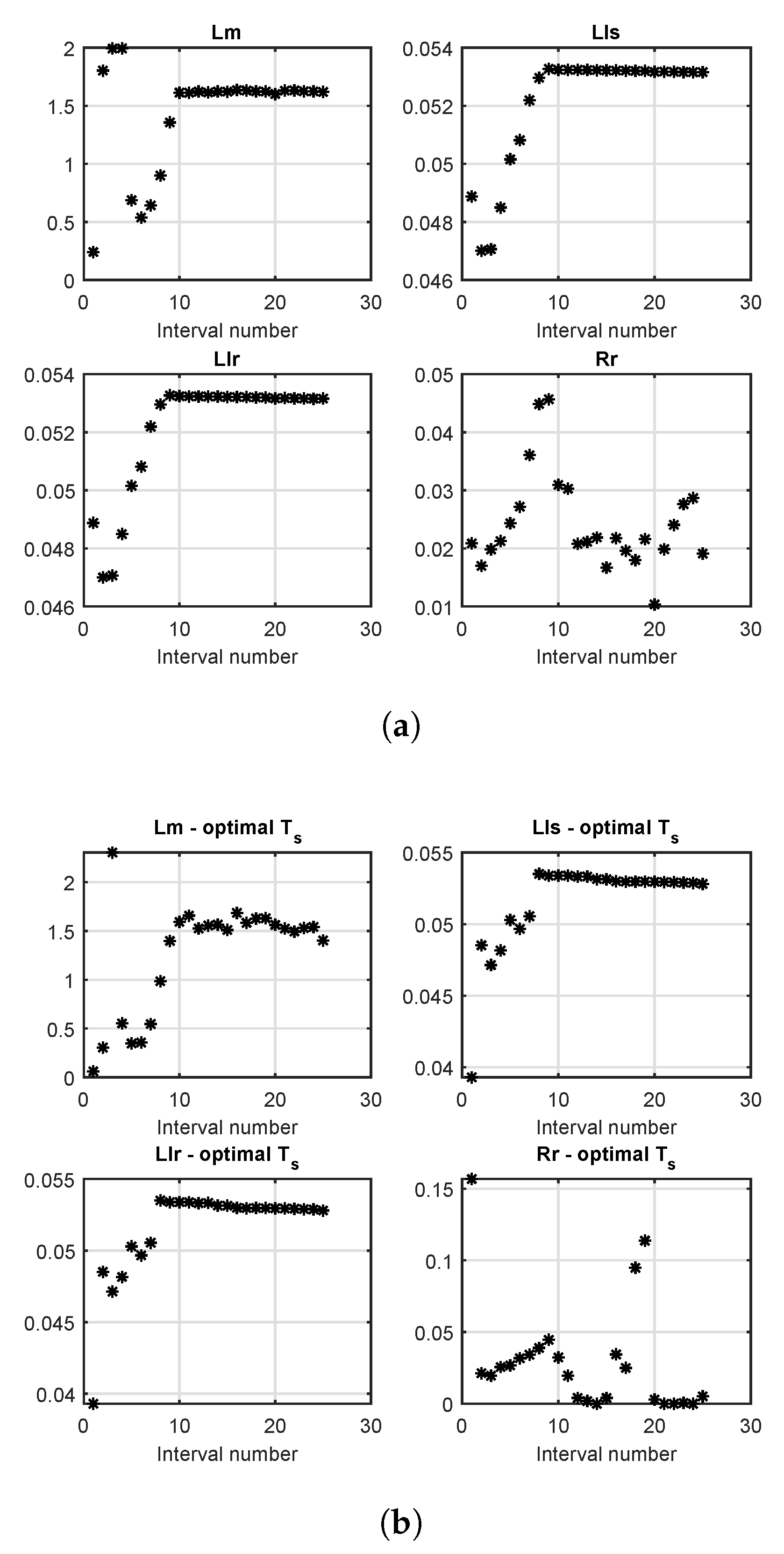
4.3. Testing Optimal Sampling Time on Parameter Estimation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| IM | Induction machine |
| RMS | Root Mean Square |
References
- Toliyat, H.; Levi, E.; Raina, M. A review of RFO induction motor parameter estimation techniques. IEEE Trans. Energy Convers. 2003, 18, 271–283. [Google Scholar] [CrossRef]
- Odhano, S.A.; Pescetto, P.; Awan, H.A.A.; Hinkkanen, M.; Pellegrino, G.; Bojoi, R. Parameter Identification and Self-Commissioning in AC Motor Drives: A Technology Status Review. IEEE Trans. Power Electron. 2019, 34, 3603–3614. [Google Scholar] [CrossRef] [Green Version]
- Montgomery, D.C. Design and Analysis of Experiments, 9th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017. [Google Scholar]
- Ross, G.J.S. Nonlinear Estimation; Springer: New York, NY, USA, 1990. [Google Scholar] [CrossRef]
- Abdallah, H.; Benatman, K. Stator winding inter-turn short-circuit detection in induction motors by parameter identification. IET Electr. Power Appl. 2017, 11, 272–288. [Google Scholar] [CrossRef]
- Verrelli, C.M.; Savoia, A.; Mengoni, M.; Marino, R.; Tomei, P.; Zarri, L. On-Line Identification of Winding Resistances and Load Torque in Induction Machines. IEEE Trans. Control Syst. Technol. 2014, 22, 1629–1637. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, J.; Chen, J.; Ye, M. A Parallel Speed and Rotor Time Constant Identification Scheme for Indirect Field Oriented Induction Motor Drives. IEEE Trans. Power Electron. 2016, 31, 6494–6503. [Google Scholar] [CrossRef]
- Boileau, T.; Nahid-Mobarakeh, B.; Meibody-Tabar, F. On-Line Identification of PMSM Parameters: Model-Reference vs EKF. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008. [Google Scholar] [CrossRef]
- Schantz, C.J.; Leeb, S.B. Self-Sensing Induction Motors for Condition Monitoring. IEEE Sens. J. 2017, 17, 3735–3743. [Google Scholar] [CrossRef]
- Telford, D.; Dunnigan, M.; Williams, B. Online identification of induction machine electrical parameters for vector control loop tuning. IEEE Trans. Ind. Electron. 2003, 50, 253–261. [Google Scholar] [CrossRef]
- Carbone, P.; Nunzi, E.; Petri, D. Sampling criteria for the estimation of multisine signal parameters. IEEE Trans. Instrum. Meas. 2001, 50, 1679–1683. [Google Scholar] [CrossRef]
- Wen, L.; Sherman, P. On the influence of sampling and observation times on estimation of the bandwidth parameter of a Gauss-Markov process. IEEE Trans. Signal Process. 2006, 54, 127–137. [Google Scholar] [CrossRef]
- Bini, E.; Buttazzo, G.M. The Optimal Sampling Pattern for Linear Control Systems. IEEE Trans. Autom. Control 2014, 59, 78–90. [Google Scholar] [CrossRef]
- Elia, N. Chapter 34—Quantized Linear Systems. In System Theory: Modeling, Analysis and Control; Springer: New York, NY, USA, 1999; pp. 433–462. [Google Scholar] [CrossRef]
- Sinha, N.; Puthenpura, S. Choice of the sampling interval for the identification of continuous-time systems from samples of input/output data. IEE Proc. D Control. Theory Appl. 1985, 132, 263. [Google Scholar] [CrossRef]
- Lennartson, B. On the choice of controller and sampling period for linear stochastic control. Automatica 1990, 26, 573–578. [Google Scholar] [CrossRef]
- Walter, E.; Pronzato, L. Identification of Parametric Models: From Experimental Data; Springer: London, UK, 1997. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A. Feedback Control of Dynamic Systems; Addison-Wesley: Boston, MA, USA, 1993. [Google Scholar]
- Hua, Y.; Sarkar, T. Matrix pencil method for estimating parameters of exponentially damped/undamped sinusoids in noise. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 814–824. [Google Scholar] [CrossRef] [Green Version]
- Sarkar, T.; Pereira, O. Using the matrix pencil method to estimate the parameters of a sum of complex exponentials. IEEE Antennas Propag. Mag. 1995, 37, 48–55. [Google Scholar] [CrossRef] [Green Version]
- Hildebrand, F.B. Introduction to Numerical Analysis; Dover Publications Inc.: New York, NY, USA, 1987. [Google Scholar]
- Krause, P.C.; Wasynczuk, O.; Pekarek, S.; Sudhoff, S.D. Analysis of Electric Machinery and Drive Systems; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Bose, B.K. Modern Power Electronics and AC Drives; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- MATLAB. Version 9.5.0 (R2018b); The MathWorks Inc.: Natick, MA, USA, 2017. [Google Scholar]
- Schlueter, M.; Erb, S.; Gerdts, M.; Kemble, S.; Ruckmann, J. MIDACO on MINLP Space Applications. Adv. Space Res. 2013, 51, 1116–1131. [Google Scholar] [CrossRef]
- Mehmedović, M. Synchronous Machine Excitation Systems Parameter Identification, Original Title in Croatian. Ph.D. Thesis, Faculty of Electrical Engineering and Computing Zagreb, Zagreb, Croatia, 1995. [Google Scholar]
- Halak, F.; Bensic, T.; Barukcic, M. Induction motor variable inductance parameter identification. In Proceedings of the IEEE International Conference on Smart Systems and Technologies (SST), Osijek, Croatia, 18–20 October 2017. [Google Scholar] [CrossRef]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benšić, T.; Varga, T.; Barukčić, M.; Jerković Štil, V. Optimization Procedure for Computing Sampling Time for Induction Machine Parameter Estimation. Appl. Sci. 2020, 10, 3222. https://doi.org/10.3390/app10093222
Benšić T, Varga T, Barukčić M, Jerković Štil V. Optimization Procedure for Computing Sampling Time for Induction Machine Parameter Estimation. Applied Sciences. 2020; 10(9):3222. https://doi.org/10.3390/app10093222
Chicago/Turabian StyleBenšić, Tin, Toni Varga, Marinko Barukčić, and Vedrana Jerković Štil. 2020. "Optimization Procedure for Computing Sampling Time for Induction Machine Parameter Estimation" Applied Sciences 10, no. 9: 3222. https://doi.org/10.3390/app10093222
APA StyleBenšić, T., Varga, T., Barukčić, M., & Jerković Štil, V. (2020). Optimization Procedure for Computing Sampling Time for Induction Machine Parameter Estimation. Applied Sciences, 10(9), 3222. https://doi.org/10.3390/app10093222