
Observer-Based Consensus Control for Heterogeneous Multi-Agent Systems with Output Saturations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
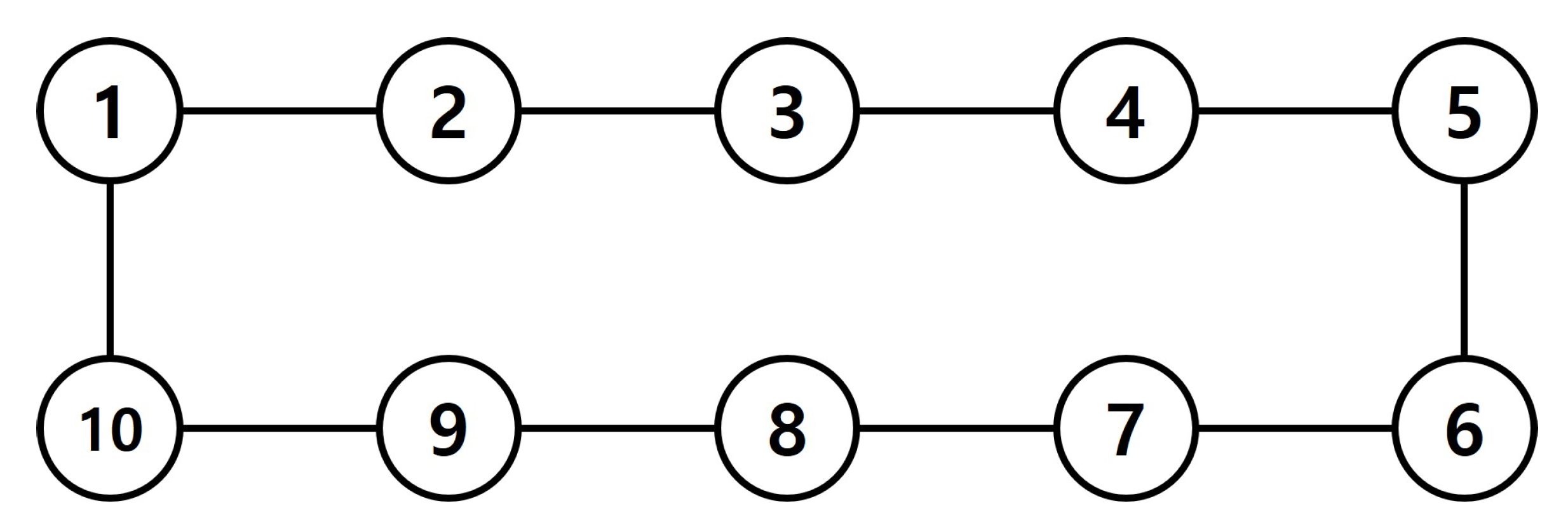
2.1. Notations and Graph Theory
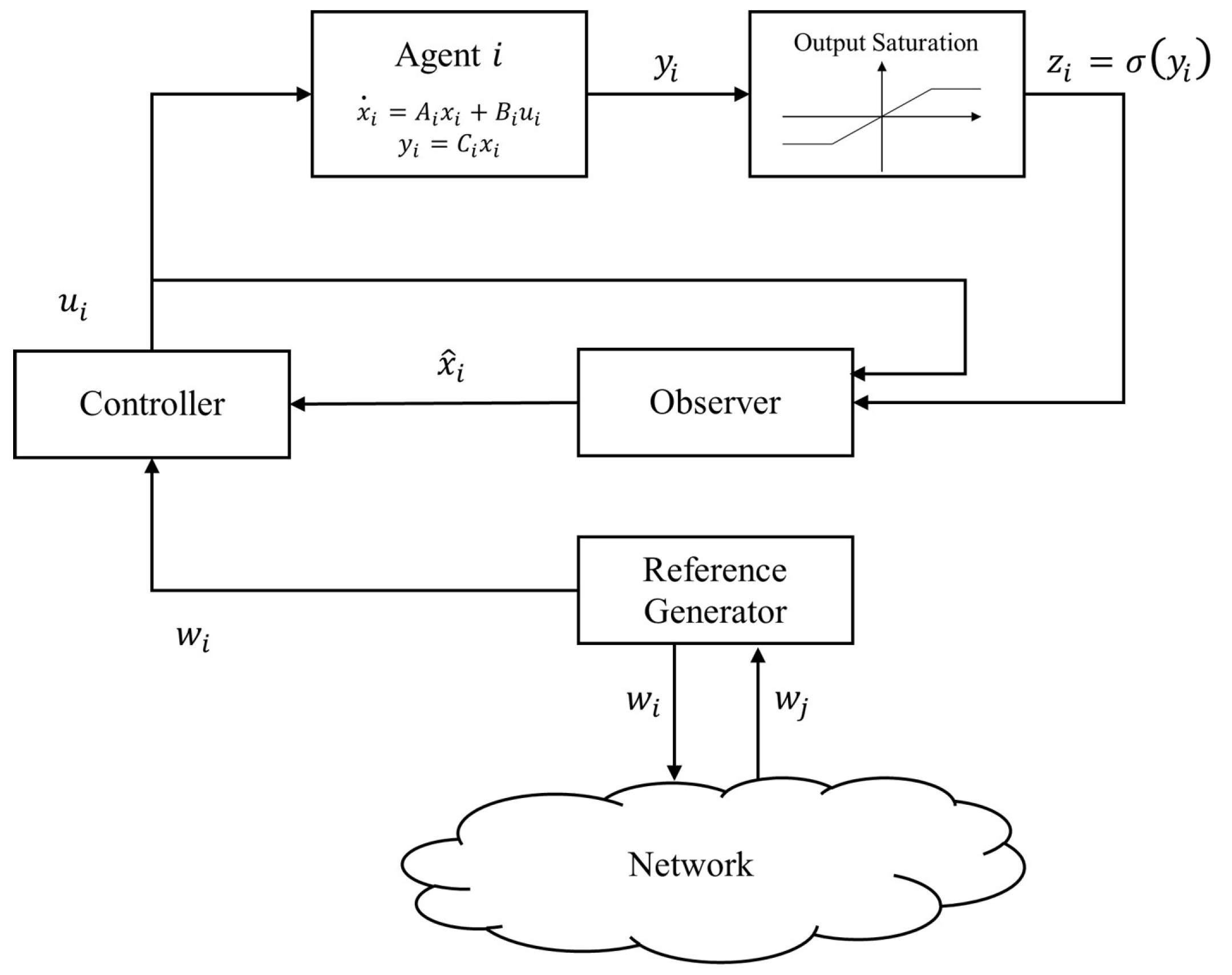
2.2. Problem Formulation
- For all , is stabilizable and is detectable.
- The matrices , , and S are neutrally stable.
- is a radially unbounded, positive definite function,
- for all ,
- Let , and no solution can stay identical in except for ;
3. Main Results
3.1. Leaderless Case
- is a constant matrix such that is Hurwitz.
- is bounded such that , for , , where is the solution of the following dynamics:
3.2. Leader-Following Case
- is detectable.
- For the leader agent, there exists , satisfying
- , where is any positive constant, and are given in (5), and is given in Lemma 1.
- , where τ is a positive constant such that , where , and the positive definite matrix W is the solution of (25) in Lemma 5.
- is a constant matrix such that is Hurwitz.
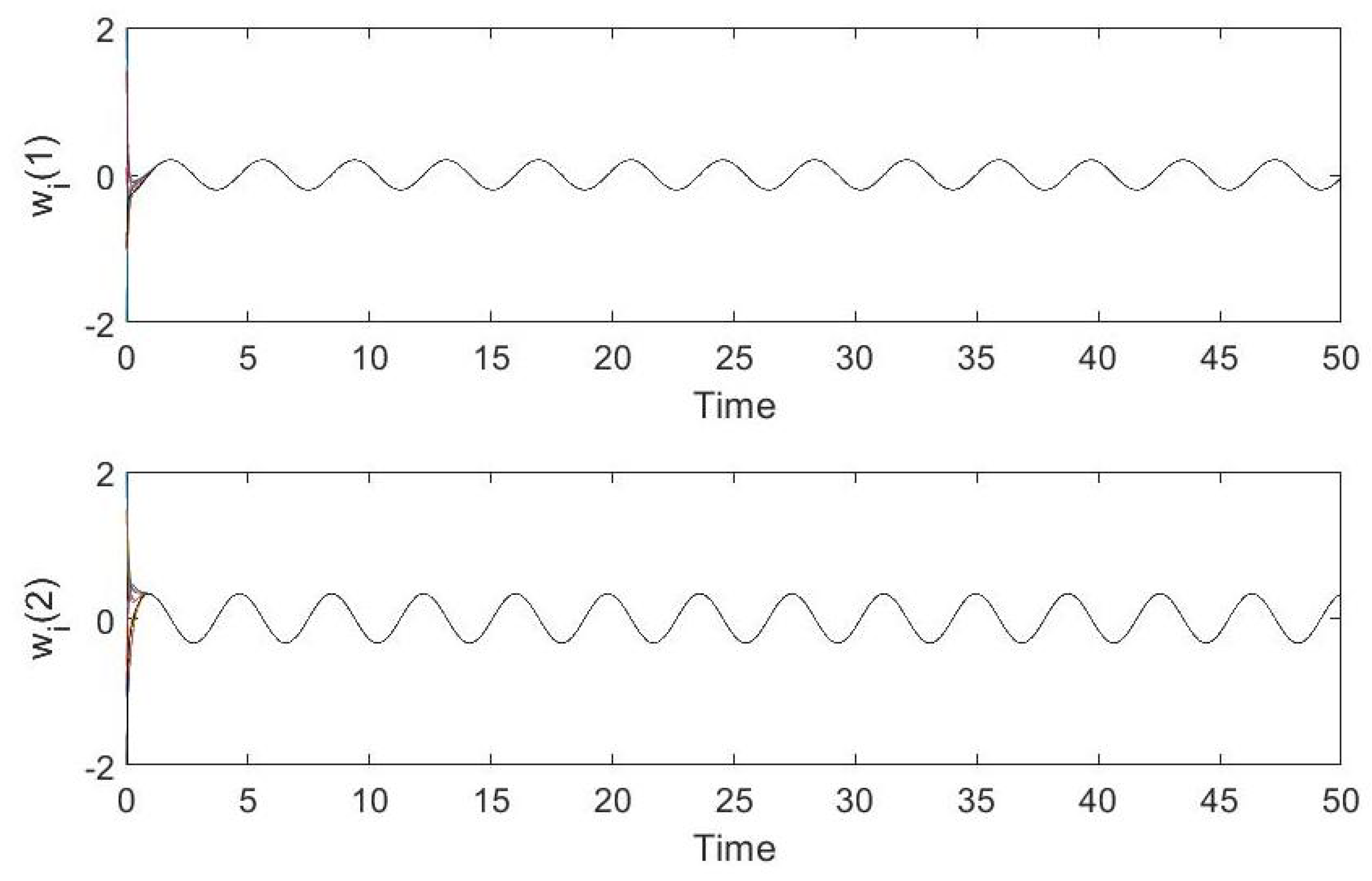
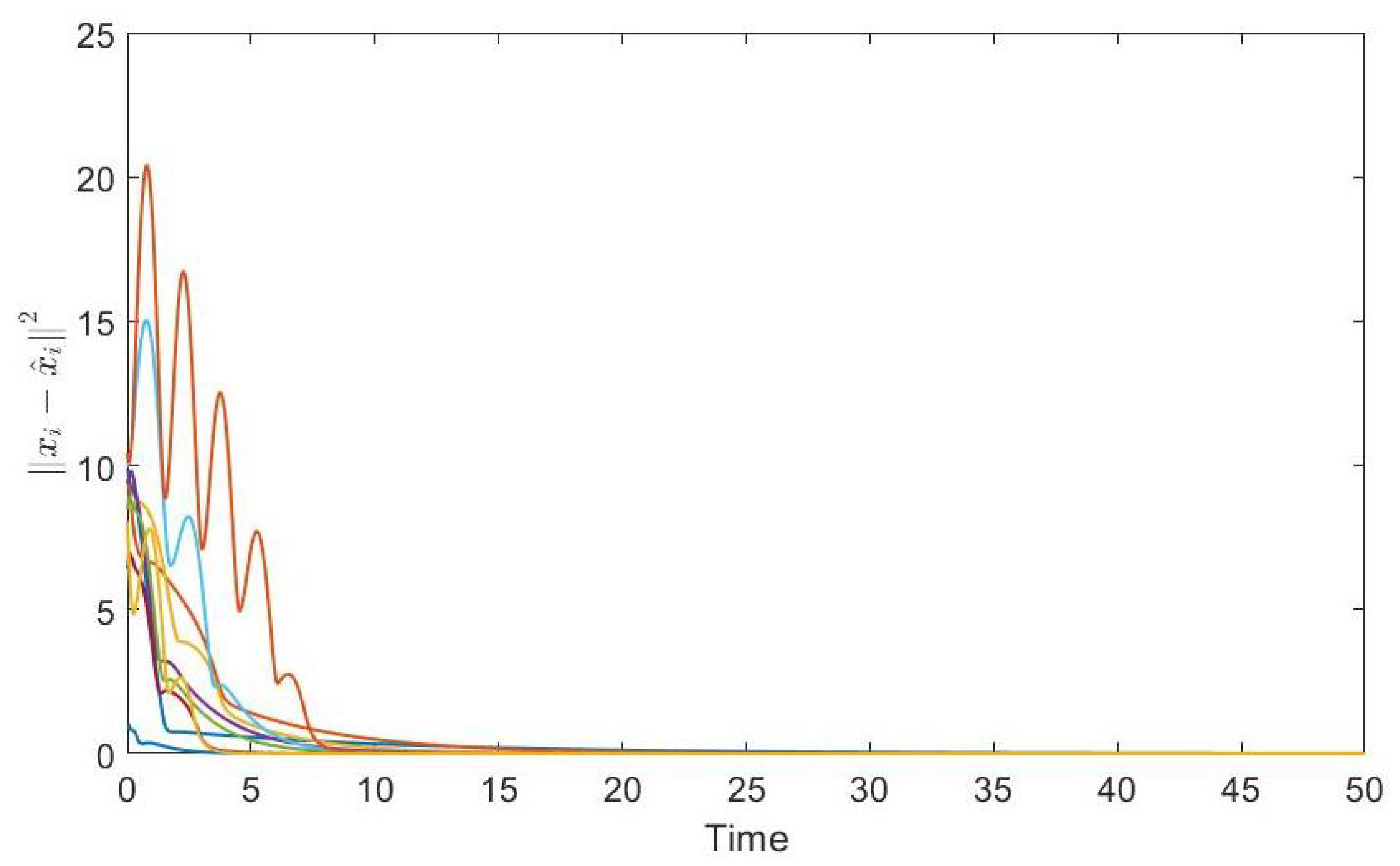
4. Simulations
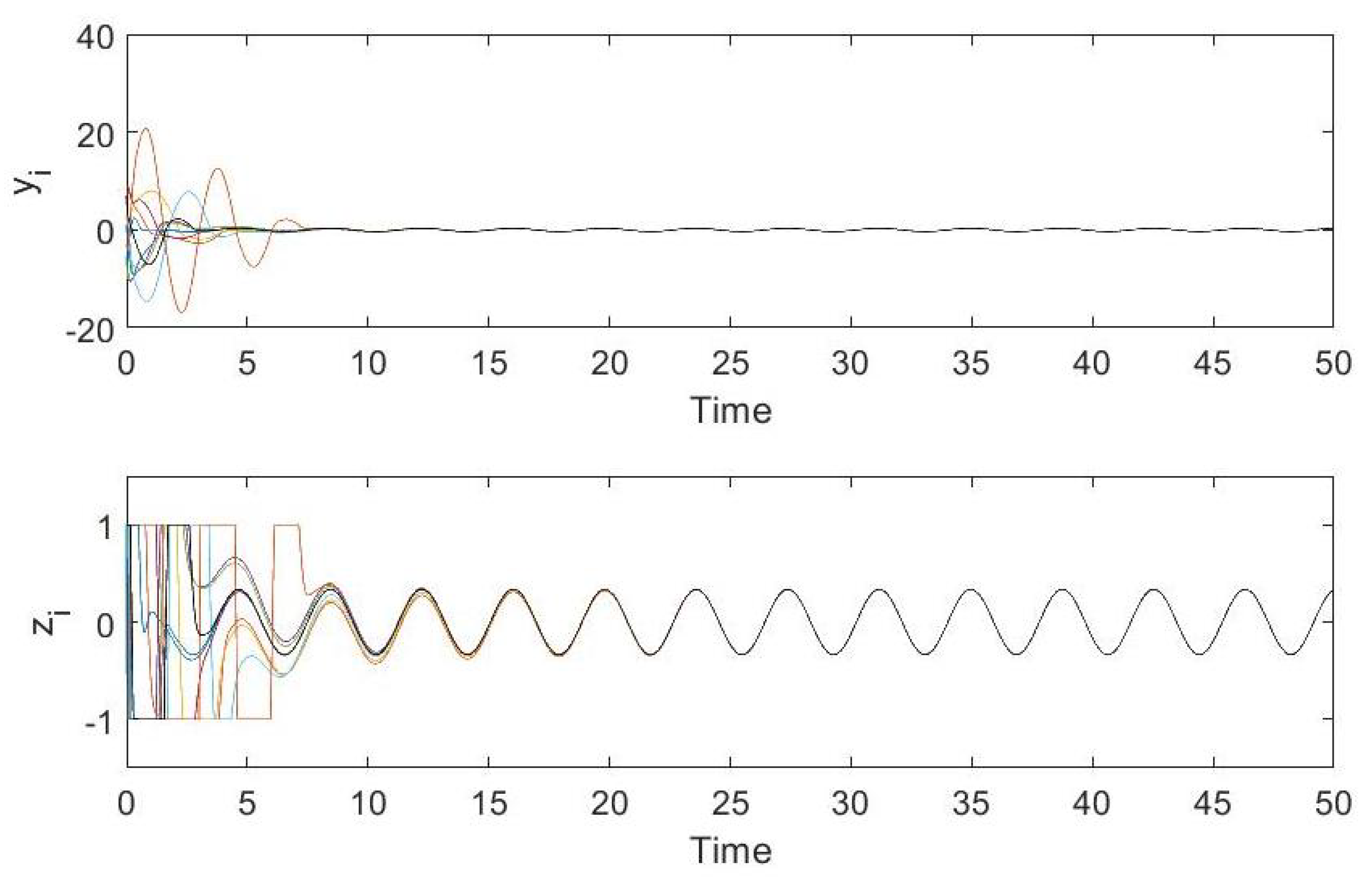
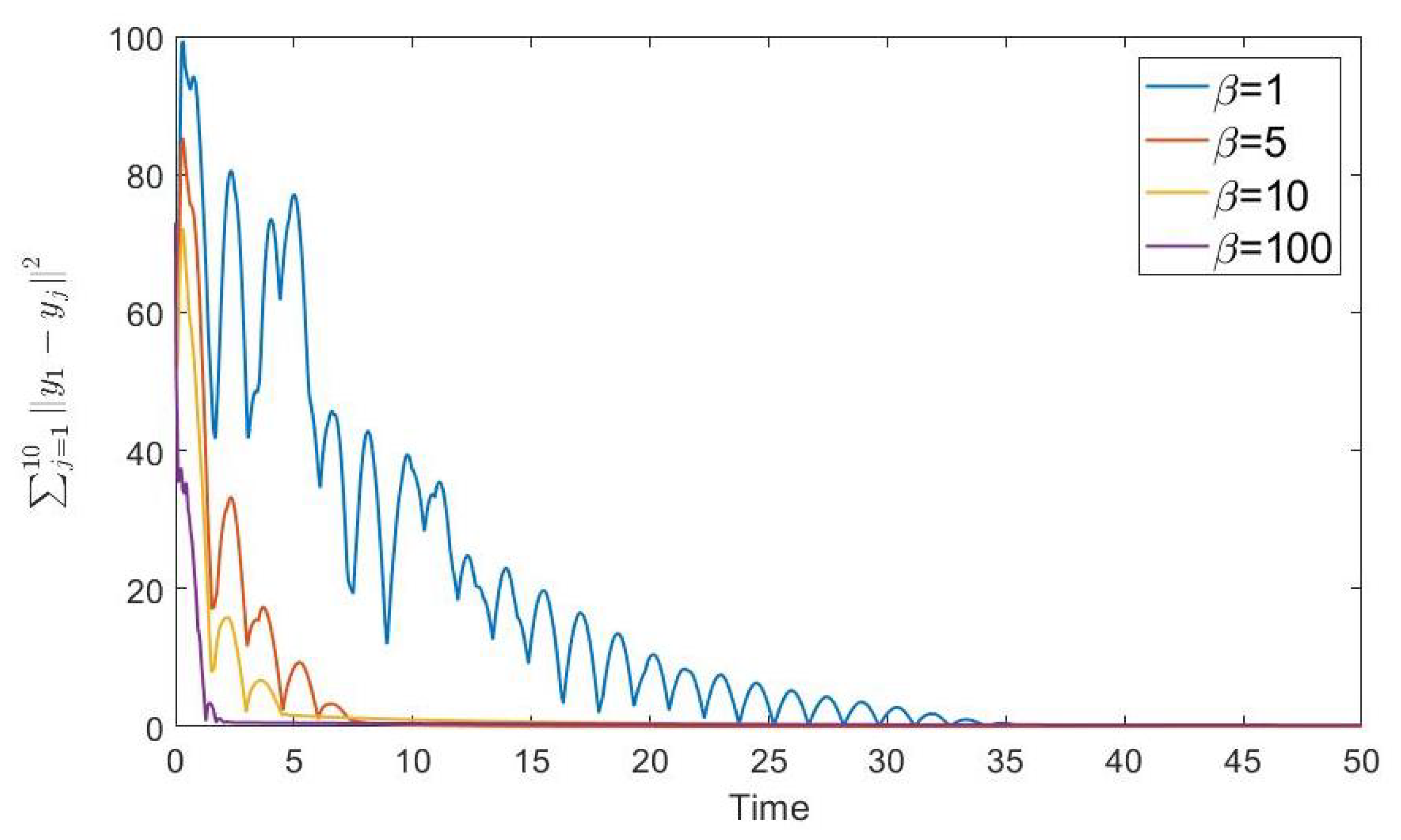
4.1. Leaderless Case
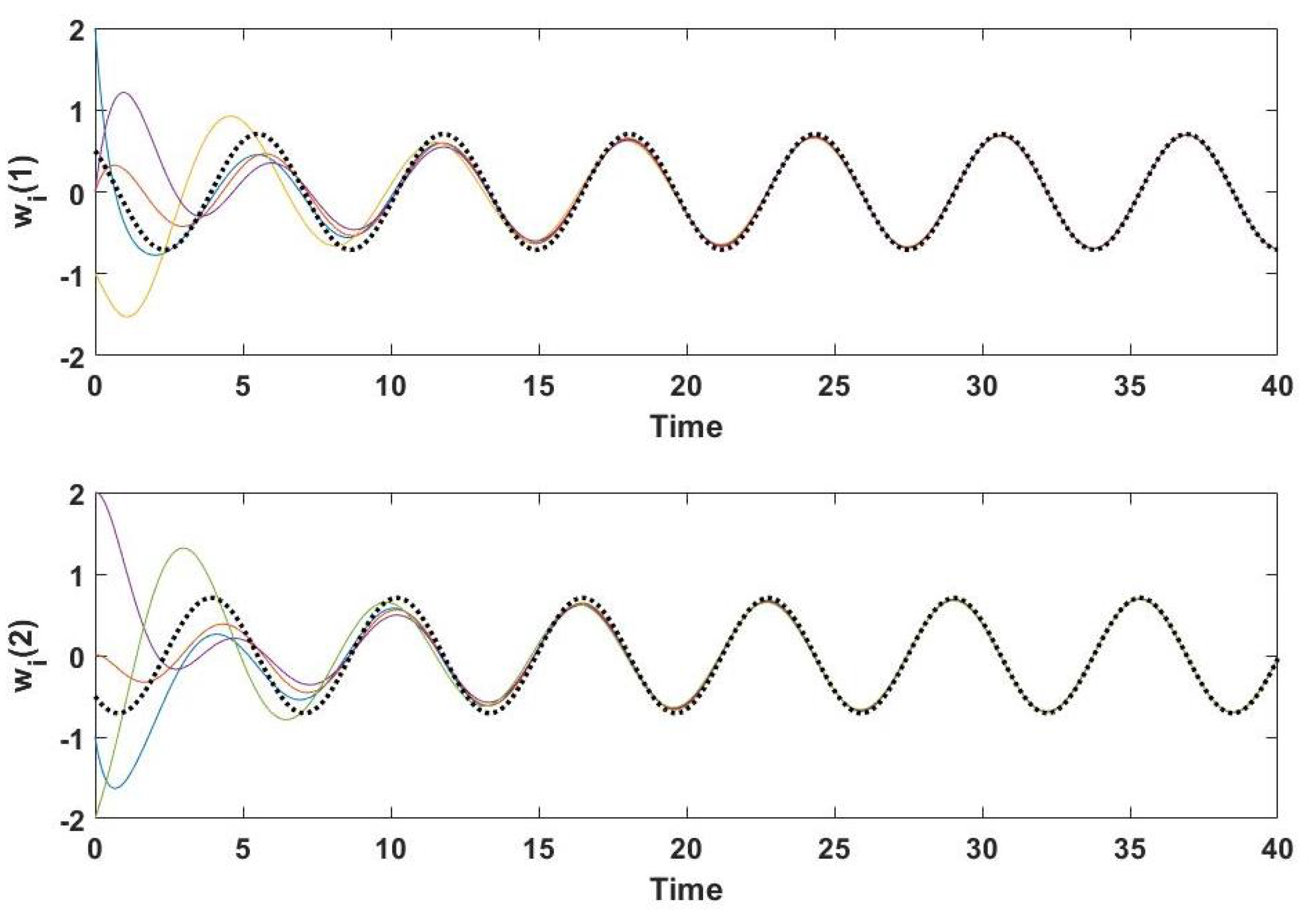
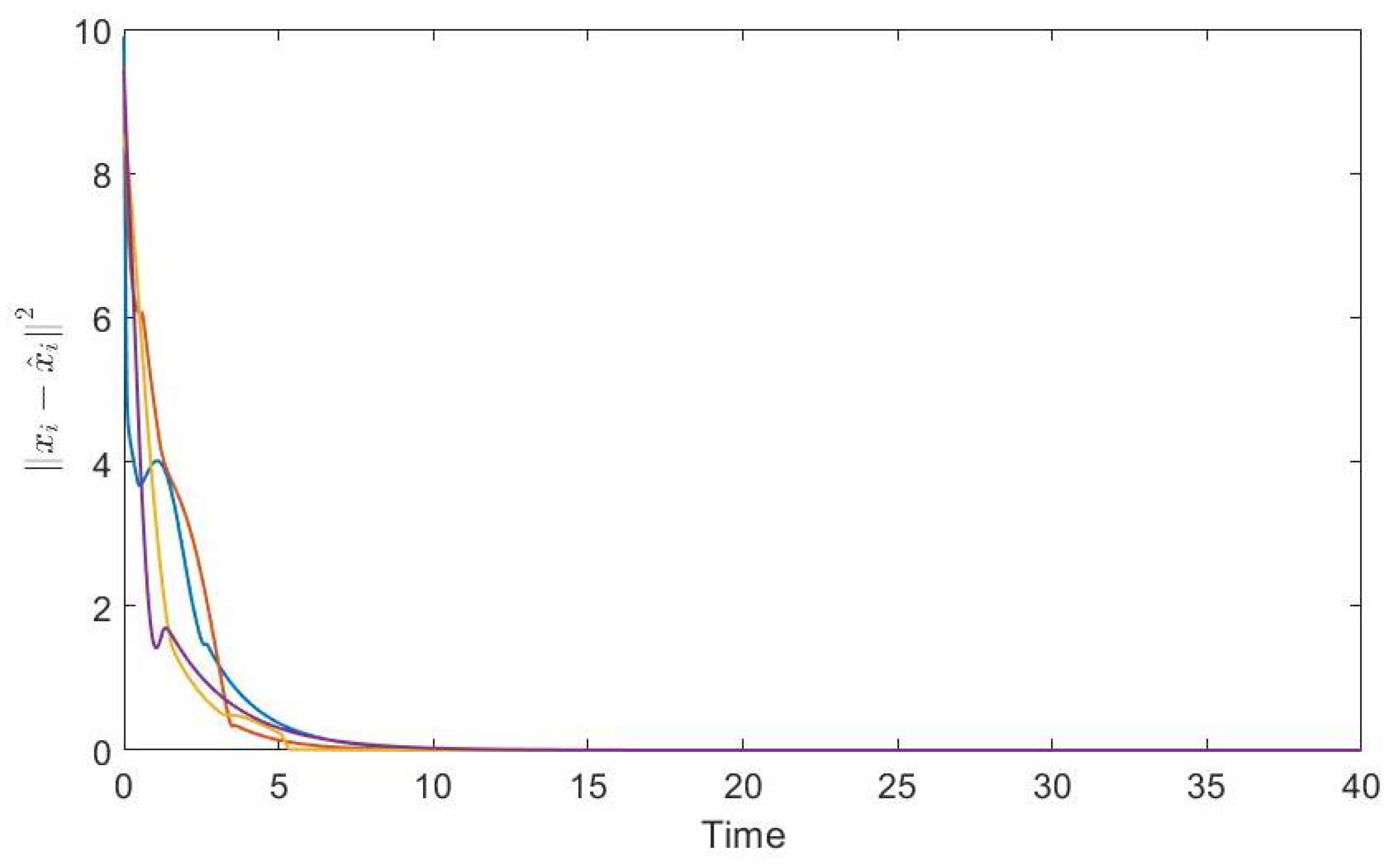
4.2. Leader-Following Case
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control Syst. Mag. 2007, 27, 71–82. [Google Scholar]
- Olfati-Saber, R.; Shamma, J.S. Consensus filters for sensor networks and distributed sensor fusion. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference 2005, Seville, Spain, 12–15 December 2005. [Google Scholar]
- Lee, J.; Back, J. Robust distributed cooperative controller for dc microgrids with heterogeneous sources. Int. J. Control Autom. Syst. 2021, 19, 736–744. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Olivares, D.; Romero, G.; Guerrero, J.A.; Lozano, R. Robustness analysis for multi-agent consensus systems with application to dc motor synchronization. Appl. Sci. 2020, 10, 6521. [Google Scholar] [CrossRef]
- Ren, W.; Atkins, E.M. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef] [Green Version]
- Ren, W. On consensus algorithms for double-integrator dynamics. IEEE Trans. Autom. Control 2008, 58, 1503–1509. [Google Scholar] [CrossRef]
- Abdessameud, A.; Tayebi, A. On consensus algorithms design for double integrator dynamics. Automatica 2013, 49, 253–260. [Google Scholar] [CrossRef]
- Seo, J.H.; Shim, H.; Back, J. Consensus of high-order linear systems using dynamic output feedback compensator: Low gain approach. Automatica 2009, 45, 2659–2664. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap. 2010, 57, 213–224. [Google Scholar]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Trentelman, H.L.; Takaba, K.; Monshizadeh, N. Robust Synchronization of Uncertain Linear Multi-Agent Systems. IEEE Trans. Autom. Control 2013, 58, 1511–1523. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Chen, G.; Cao, M.; Kurths, J. Second-order consensus for multi-agent systems with directed topologies and nonlinear dynamics. IEEE Trans. Syst. Man Cybern. B 2010, 40, 881–891. [Google Scholar]
- Zhang, F.; Trentelman, H.L.; Scherpen, J.M.A. Fully distributed robust synchronization of networked Lur’e systems with incremental nonlinearities. Automatica 2014, 50, 2515–2526. [Google Scholar] [CrossRef]
- Liu, J.; Dai, M.-Z.; Zhang, C.; Wu, J. Edge-event-triggered synchronization for multi-agent systems with nonlinear controller outputs. Appl. Sci. 2020, 10, 5250. [Google Scholar] [CrossRef]
- Wieland, P.; Sepulchre, R.; Allgower, F. An internal model principle is necessary and sufficient condition for linear output synchronization. Automatica 2011, 47, 1068–1074. [Google Scholar] [CrossRef]
- Ma, Q.; Miao, G. Output consensus for heterogeneous multi-agent systems with linear dynamics. Appl. Math. Comput. 2015, 271, 548–555. [Google Scholar] [CrossRef]
- Han, T.; Guan, Z.-H.; Xiao, B.; Wu, J.; Chen, X. Distributed output consensus of heterogeneous multi-agent systems via an output regulation approach. Neurocomputing 2019, 360, 131–137. [Google Scholar] [CrossRef]
- Li, X.; Ma, D.; Hu, X.; Sun, Q. Dynamic event-triggered control for heterogeneous leader-following consensus of multi-agent systems based on input-to-state stability. Int. J. Control Autom. Syst. 2020, 18, 293–302. [Google Scholar] [CrossRef]
- Baldi, S.; Frasca, P. Leaderless synchronization of heterogeneous oscillators by adaptively learning the group model. IEEE Trans. Autom. Control 2020, 65, 412–418. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Chen, M.Z.; Lam, J.; Lin, Z. Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 1881–1889. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Su, H.; Wang, X.; Chen, G. Fully distributed event-triggered semiglobal cosnensus of multi-agent systems with input saturations. IEEE Trans. Ind. Electron. 2017, 64, 5055–5064. [Google Scholar] [CrossRef]
- Wang, B.; Chen, W.; Zhang, B. Semi-global robust tracking consensus for multi-agent uncertain systems with input saturation via metamorphic low-gain feedback. Automatica 2019, 103, 363–373. [Google Scholar] [CrossRef]
- Zhao, Z.; Lin, Z. Global leader-following consensus of a group of general linear systems using bounded controls. Automatica 2016, 68, 294–304. [Google Scholar] [CrossRef]
- Xie, Y.; Lin, Z. Global optimal consensus for multi-agent systems with bounded controls. Syst. Control Lett. 2017, 102, 104–111. [Google Scholar] [CrossRef]
- Shi, L.; Li, Y.; Lin, Z. Semi-global leader-following output consensus of heterogeneous multi-agent systems with input saturation. Int. J. Robust Nonlinear Control 2018, 28, 4916–4930. [Google Scholar] [CrossRef]
- Lim, Y.-H.; Ahn, H.-S. Semiglobal consensus of heterogeneous multiagent systems with input saturations. Int. J. Robust Nonlinear Control 2018, 28, 5652–5664. [Google Scholar] [CrossRef]
- Liu, K.; Gu, H.; Wang, W.; Lu, J. Semiglobal consensus of a class of heterogeneous multi-agent systems with saturation. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4946–4955. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, C. Conditions for consensus in directed networks of agents with heterogeneous output saturations. IET Control Theory Appl. 2016, 10, 2119–2127. [Google Scholar] [CrossRef]
- Lim, Y.-H.; Ahn, H.-S. Consensus with output saturations. IEEE Trans. Autom. Control 2016, 62, 5388–5395. [Google Scholar] [CrossRef]
- Wang, Q. Scaled consensus of multi-agent systems with output saturation. J. Frankl. Inst. 2017, 354, 6190–6199. [Google Scholar] [CrossRef]
- Lim, Y.-H.; Lee, G.-S. Observer-based distributed consensus algorithm for multi-agent systems with output saturations. J. Inf. Commun. Converg. Eng. 2019, 17, 167–173. [Google Scholar]
- Hilhorst, G. Stabilisation of Linear Time-Invariant Systems Subject to Output Saturation. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2011. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 2002. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, Y.-H.; Lee, G.-S. Observer-Based Consensus Control for Heterogeneous Multi-Agent Systems with Output Saturations. Appl. Sci. 2021, 11, 4345. https://doi.org/10.3390/app11104345
Lim Y-H, Lee G-S. Observer-Based Consensus Control for Heterogeneous Multi-Agent Systems with Output Saturations. Applied Sciences. 2021; 11(10):4345. https://doi.org/10.3390/app11104345
Chicago/Turabian StyleLim, Young-Hun, and Gwang-Seok Lee. 2021. "Observer-Based Consensus Control for Heterogeneous Multi-Agent Systems with Output Saturations" Applied Sciences 11, no. 10: 4345. https://doi.org/10.3390/app11104345
APA StyleLim, Y.-H., & Lee, G.-S. (2021). Observer-Based Consensus Control for Heterogeneous Multi-Agent Systems with Output Saturations. Applied Sciences, 11(10), 4345. https://doi.org/10.3390/app11104345