1. Introduction
The use of fibre reinforced polymers (FRPs) in aerospace, automotive and shipbuilding industry is well-established, so applications in spaceships, planes, cars and boats are widely known and common. In contrast, composites are still considered novel materials in construction industry although their inclusion in Bridge Engineering offers several benefits, such as low maintenance cost, electrical transparency, dead load reduction, corrosion resistance, and fast installation [
1]. These materials have proved to lead to sustainable and environmentally-friendly bridge projects [
2,
3], so they may also contribute to the ‘Sustainable Cities and Communities’ goal, set as a priority by current society [
4]. As a result, different types of laboratory [
5,
6] and in-service [
7,
8,
9,
10] footbridges, in which most of the structural elements were manufactured with FRPs, have been constructed and analysed around the world.
High strength-to-weight ratio is another major advantage of FRPs. In composite footbridges, however, this feature may lead to a structural design governed by Vibration Serviceability Limit State (VSLS) given the low modal masses associated to vibration modes prone to be excited by human loads [
11]. Traditional design guidelines, such as SETRA [
12] or HIVOSS [
13], consider that structures with natural frequencies that lie below 1 Hz and above 5 Hz are unlikely to be excited in resonance by pedestrians (
Figure 1). By preventing natural frequencies of a structure within this range, excessive vertical human-induced vibrations are assumed to be avoided and dynamic response analysis is not mandatory. This may not be applied to FRP footbridges as researchers have demonstrated that the dynamic behaviour of composite footbridges may be affected by higher and less energetic harmonics of pedestrian actions [
5,
14].
Conventionally, moving force (MF) models have been employed in guidelines [
12,
13,
15] to represent pedestrian activities and assess the vibration comfort on structures. Furthermore, harmonic moving load models have been incorporated for the first time into the new proposal for Eurocodes [
16,
17]. These non-interacting models are typically defined by a Fourier series, in which Dynamic Load Factors (DLFs) are used and the frequency of the acting force change depending on the human activity. MF models are based on the assumption that forces generated by humans are the same on a rigid surface and on a flexible surface. In contrast to pedestrian structures built with traditional materials, models derived from treadmills or force plates campaigns on stiff surfaces [
18,
19,
20] may not be reliable when assessing the response of lightweight composite structures. For instance, the vibration response of a laboratory glass FRP (GFRP) facility was poorly estimated (overestimated) using MF models [
21].
The previous models often lead to high unreal predictions of the response of lightweight pedestrian structures since human-structure interaction (HSI) is neglected [
22]. Due to the lightness and low stiffness of composite materials, interaction phenomenon may be a key aspect on the dynamic behaviour of FRP footbridges since significant vibration amplitudes may be reached [
23]. Moreover, accounting for HSI on composite pedestrian structures could be beneficial in the assessment of the structural performance at VSLS and the sizing of vibration control devices [
24]. Therefore, an accurate estimation of human-induced vibrations is needed to avoid oversizing an FRP footbridge, which is directly related to the initial budget of a project. Since the first proposal from Archbold [
25], several models [
26,
27] accounting for the dynamic parameters of the human body have been used to consider HSI on the dynamic response of footbridges. Under this approach, the mass, frequency, and damping ratio of the human body together with an external force are employed along with the properties of the structure, leading to a coupled human-structure vibrating system.
Among the different HSI models available in literature, a single degree of freedom (SDOF) mass-spring-damper-actuator (MSDA) system is the only one mentioned in a design guidance [
28]. Besides the dynamic properties of the human body, this model, which has been used to represent bouncing action, considers an internal harmonic driving force that affects both the pedestrian and the structure. Hence, the ground reaction force transmitted to the structure is comprised by the actuator force and the stiffness and damping forces of the oscillator, depicted though the properties of the pedestrian. In contrast to MF models that use DLFs to describe a periodic action, the internal driving force employs Generated Load Factors (GLFs) [
29].
This research presents an experimental and numerical study related to the dynamic behaviour of a laboratory FRP footbridge, whose linear mass is only 80 kg/m. The lightweight facility exhibits excessive vertical vibrations when the fourth harmonic of a walker is synchronised with the bridge’s fundamental frequency. As the first natural frequency of the structure lies above the limits stated in traditional guidelines, a MSDA system is employed herein to represent a pedestrian crossing the bridge and account for HSI. To the best of authors’ knowledge, the identified model is the first representation of a single pedestrian walking that considers four harmonics of the human action and interaction phenomenon. To this end, data recorded from experiments involving six test subjects crossing the footbridge is employed. Additionally, an optimization problem aiming to minimise the difference between experimental results and numerical outputs from a coupled human-structure system, based on a closed-loop transfer function (TF), is addressed.
After this introduction, the text is organised as follows. The simply supported FRP bridge is described in
Section 2, whilst the performed experimental campaign is explained in
Section 3. The calibration of a FE model of the structure together with the numerical bridge response under the action of a single pedestrian are presented in
Section 4. The identified HSI model, based on a closed-loop TF, is also included in this section. Considering the presented model, a parametric analysis varying the dynamic properties of the human body and the GLFs of the internal driving force is carried out in
Section 5. Finally, concluding remarks and future works are drawn in
Section 6.
4. Numerical Study
In this section, the FE model of the structure and its numerical calibration are presented. Additionally, the dynamic response of the FRP structure is computed by using non-interacting and interacting load models that represent a single pedestrian walking.
4.1. Finite Element Model
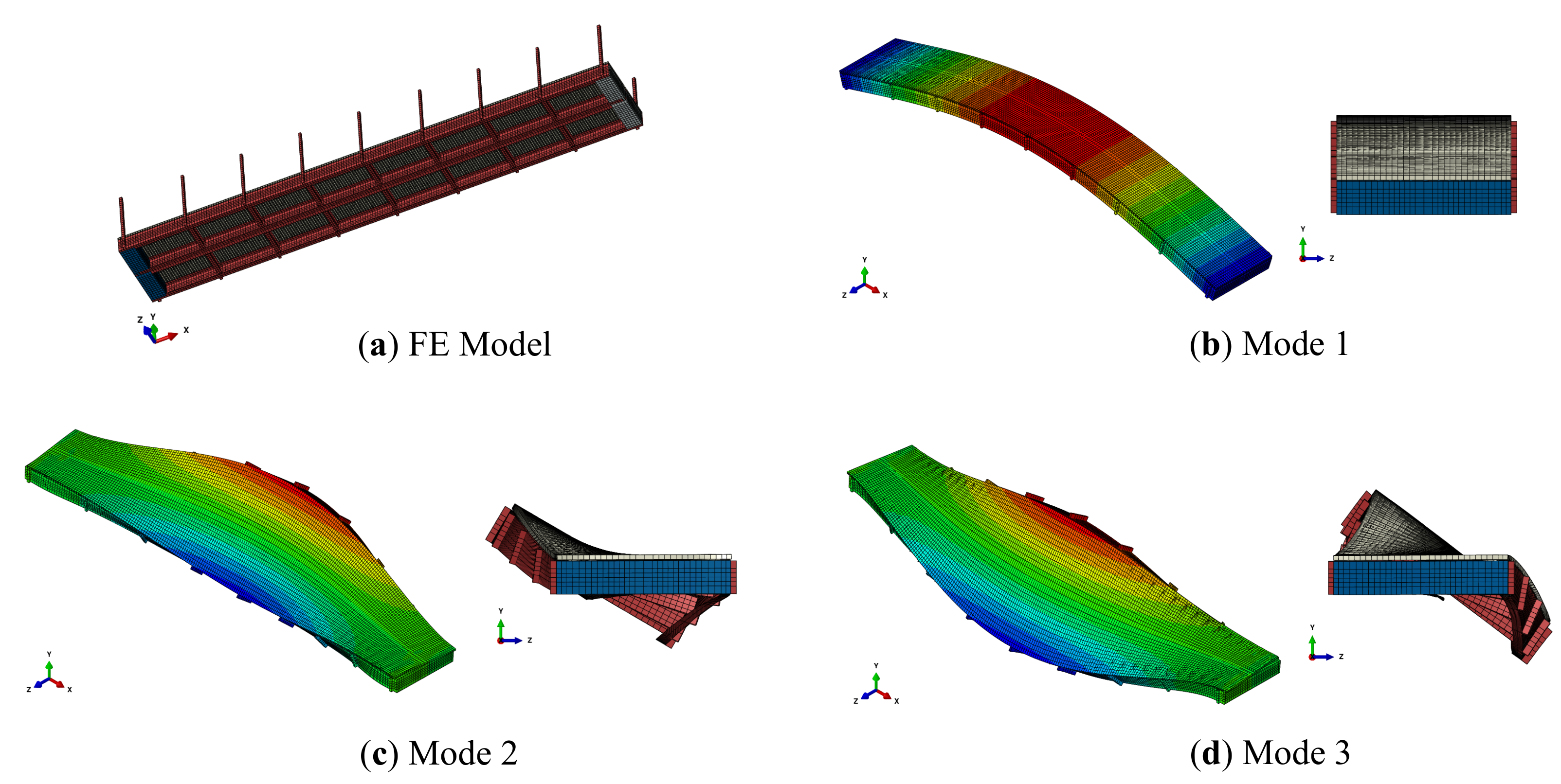
A linear elastic FE model of the structure, displayed in
Figure 7a, was developed in Abaqus [
36] based on the information presented in
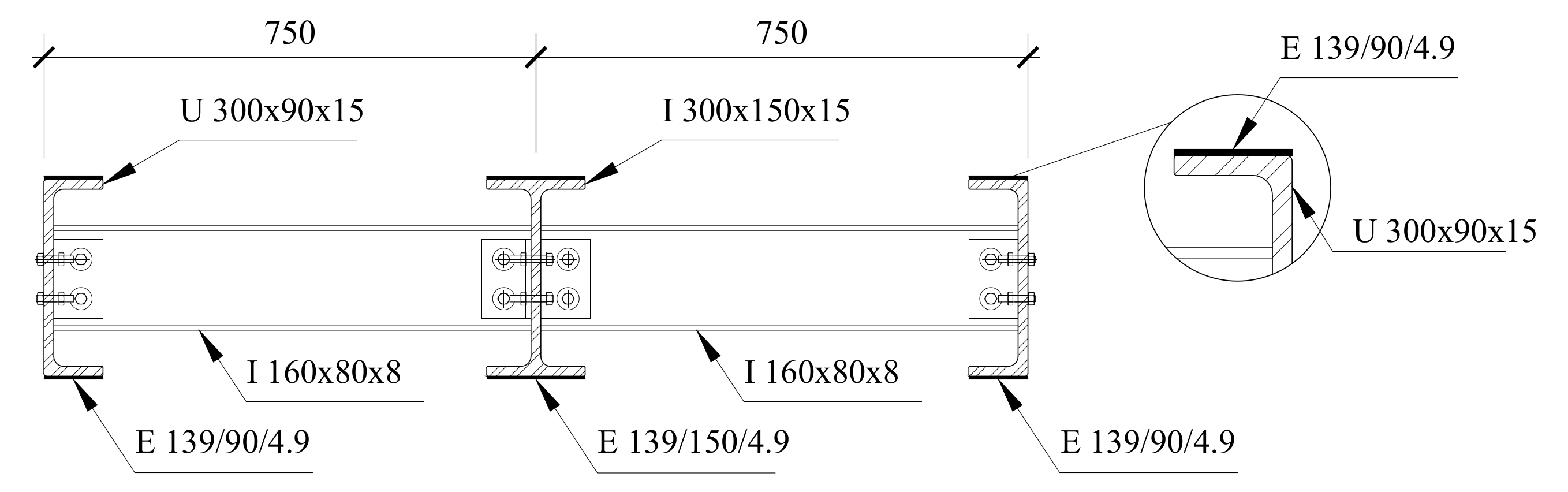
Section 2. Stringers, cross-beams, handrail poles, and deck panels were modeled with node reduced integration shell elements (S4R). Whereas solid elements C3D8R were used to model the concrete blocks at both ends of the footbridge. Also, top and bottom flanges of the stringers were defined as shell composite layups composed of two plies. One layer corresponds to the GFRP laminate, and the other one refers to the CFRP strip.
Stringers, cross-beams, and handrail poles were joined together using the tie constraint option. The connections between the stringers’ top flange and the bottom part of the deck were defined employing connector elements type CONN3D2, every 25 mm along the stringers’ length. Additionally, the stringers were connected to the concrete blocks by using the embedded element technique, so the solid elements were hosts for the shell elements. The size of the mesh for the different elements was 30 mm by 30 mm.
To represent a simply supported structure, displacements of two areas of 0.20 m by 0.15 m at the bottom of one concrete block were constrained in the longitudinal, vertical and transversal (x, y and z) direction. Whilst vertical (y) and transversal (z) displacements of two similar areas at the bottom of the other block were constrained. Finally, an additional uniformly distributed non-structural mass of 2.0 kg/m
over the bridge deck was assumed to account for the L profiles, washers, nuts and bolts omitted in the model. Mechanical properties of the FRP profiles and the other materials employed to develop the numerical model are presented in
Table 3.
4.2. Modal Analysis
Employing the described model, the first three numerical vibration modes of the structure were obtained by carrying out a modal analysis.
Figure 7b–d displays the obtained results. As described in
Section 3.2, Mode 1 is the vertical bending vibration mode, Mode 2 corresponds to a low torsional-high lateral mode, and Mode 3 is a high torsional-low lateral mode. The values of
are given in
Table 4, where it is noticed that the relative difference between the experimental and numerical natural frequencies is quite high for the second vibration mode. To reduce the discrepancies between the results, the FE model was calibrated as explained in
Section 4.3.
4.3. FE Model Updating
As results from a FE model depend on the material properties (e.g., elastic modulus, mass density, Poisson’s ratio, etc.), physical dimensions and boundary conditions, an adequate and careful selection of the required values is needed to obtain an accurate prediction of the real response of a structure. Thus, the following sections described the numerical calibration of the previously described FE model. The updating procedure was focused on the material properties of the elements that compound the structure.
4.3.1. Selection of Parameters
To select the parameters of the FE model to be updated, a global sensitivity analysis was carried out considering the statistical properties shown in
Table 3. A two-parameter Weibull distribution was assumed to characterize the properties of composite elements, as suggested by Zureick et al. [
37], whereas the statistical distributions for the remain parameters were based on Ref. [
38]. All the distributions were assumed to be mutually independent. The analysis aimed to identify the most relevant material properties on the numerical response of the composite footbridge, particularly the natural frequencies, the
values (defined later in Equation (
4)) and the sag at midspan due to a static load.
A stochastic sampling strategy was used to perform the analysis, so the Latin Hypercube Method was employed to generate 1000 multivariate stochastic samples of the mechanical properties. Using the properties of the elements shown in
Table 3, different samples for the GFRP mass density (
), GFRP stringers (
), GFRP crossbeams (
), GFRP deck (
), CFRP mass density (
), CFRP strips (
), concrete blocks (
), steel connectors (
), and non-structural mass (
) were generated.
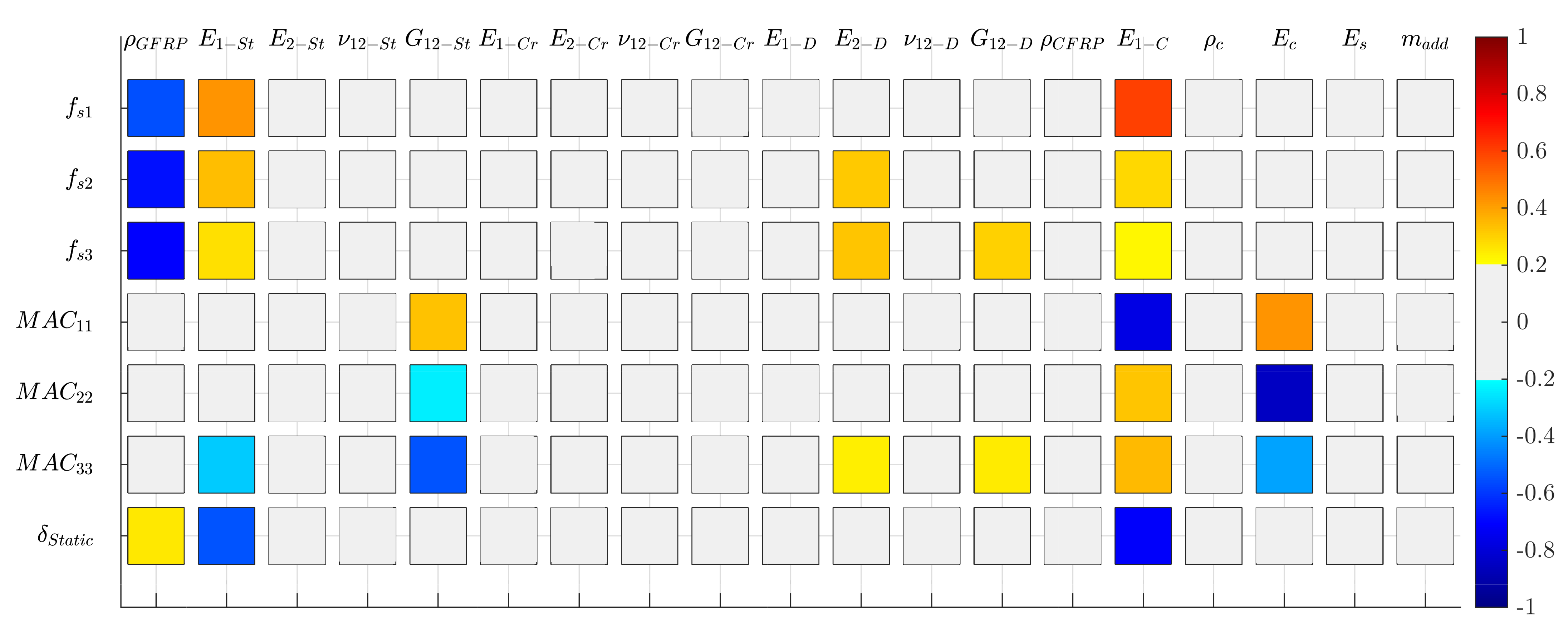
Figure 8 shows the results through the Spearman correlation coefficient matrix, in which values between
are excluded for a better visualization. From this matrix,
,
,
,
,
,
, and
were identified as influential properties on the structural behaviour of the FRP footbridge. Therefore, the seven parameters were selected as variables to be calibrated.
4.3.2. Calibration
Among the several approaches available to update a FE model [
39], an iterative method was used hereby considering an objective function that quantifies the difference between the experimental and numerical results. The FE model updating procedure using a single-objective approach may be formulated as follows
being
the parameters to be updated,
and
the corresponding lower and upper limits, and
w the weights of the objective function
, which is defined as follows
The residuals
,
and
associated to natural frequencies, mode shapes and static displacements, respectively, are defined by the following expressions
where
is the number of considered vibration modes of the structure and
is the number of measured static displacements. Subscripts
num and
exp indicate numerical and experimental values, respectively. The parameter
gives the orthogonality between two vibration modes and is defined as
To solve the optimization problem, the Genetic Algorithm (GA) was applied in this study involving the use of two software: Abaqus [
36] and Matlab [
40]. Considering the seven experimental results (
Table 1 and the static sag) and the seven
parameters selected previously, the following values were adopted for the updating process of the FE model of the FRP footbridge:
,
,
,
, and
. In addition, the search domain for the parameters is presented in
Table 3, and the following factors were considered for the GA: initial population of 20 individuals, fitness limit of 10
, and maximum number of generations of 100.
Four updating runs (GA1–GA4) were carried out with different initial population, and values obtained from the updating run GA2 were adopted as solution for the posterior dynamic analyses of the composite structure. This result was selected considering that the updated values showed the least dispersion from the corresponding initial values. The calibrated natural frequencies are presented in
Table 4. A clear reduction of the relative error is achieved while the MAC values remain in good agreement. Also,
Table 5 reflects the good compromise between the numerical and experimental displacement at mid-span. In this case, the relative error is below 1%. Finally,
Table 6 presents the material properties before and after the calibration procedure.
4.4. Moving Force Models
Several non-interacting MF models have been proposed over the years to represent the vertical walking action of a single pedestrian [
12,
15,
17]. This human load may be modelled as a periodical function defined by a Fourier series, which typical expression (disregarding the static load term) in the time domain is as follows
with
, 2, …
, where
is the total number of harmonics considered,
r is the harmonic number,
is the static weight of a person usually taken as 700 N, DLF
is the dynamic loading factor associated to the
rth harmonic,
is the frequency component of the repetitive loading, and
is the phase or lag angle of the
rth harmonic. From the second harmonic onwards,
can be taken equal to
as a conservative approach [
15].
Even though traditional guidelines and codes imply that footbridges with fundamental vertical frequencies above to 5 Hz are unlikely to be excited by higher harmonics of a human activity (
Figure 1), significant vertical vibrations were seen when the fourth harmonic of a single pedestrian walking was synchronised with the fundamental frequency of the lightweight FRP facility studied hereby (
Figure 6c). The only guideline that accounts for MF models with four harmonics to describe a walker is ISO-10137 [
15]. Thus, the numerical response of the FRP structure was calculated applying its recommendations even though ISO-10137 [
15] sets design guidance against building floor vibrations.
Table 7 presents the values of DLF
for a step frequency (
) of 1.9 Hz accounting for four harmonics (
).
Considering the updated FE model and the MF from ISO-10137 [
15] travelling at 1.3 m/s, the numerical response of the footbridge was obtained through the FE Method using Abaqus [
36]. Hence, the governing equations of the linear system with viscous damping is expressed as follows
where
,
and
are the mass, damping and stiffness matrices of the structure,
is the harmonic force vector,
is the vector of generalized coordinates that contains all the degrees of freedom of the model, and
and
are the first and second time derivatives of the displacement vector, respectively. The force moving across the structure is proportionally applied on the nodes depending on the speed and the mesh size.
To solve the system of differential equations shown in Equation (
6), a transient modal dynamic analysis was selected, considering only the vertical bending vibration mode. Also, a constant time step of 0.001 s and a damping ratio of 1.55% were adopted. In
Figure 9, a comparison between the experimental and numerical 1s RMS acceleration of the footbridge at midspan is displayed. Similarly to results obtained in other lively pedestrian structures [
21,
41], an overestimation of the real response was achieved using the non-interacting MF model. The root-mean-square error (RMSE) between the results was 70.6%. Hence, the inclusion of the dynamic properties of the human body was essential to an accurate assessment of the dynamic behaviour of this lightweight structure. Next section tackles this issue accounting for the interaction phenomenon between the structure and the pedestrian.
4.5. Human-Structure Interaction Model
Based on Dougill et al. [
29], a SDOF MSDA system was adopted to address the interaction phenomenon when a person crosses the footbridge. Therefore, the HSI model was comprised of a simply supported beam and the human walking. A schematic representation of the model is shown in
Figure 10a considering that the pedestrian is located at midspan. Additionally,
Figure 10b displays the corresponding block diagram.
From the graph, the closed-loop TF
of the coupled human-structure system in the Laplace domain can be derived as follows
where
is the Laplace variable,
is the circular frequency in rad/s,
is the TF of the structural system,
is the TF between the actuator force (human driving force) and the contact force of the human with the structure, and
is the TF related to the interaction phenomenon.
Generally, the TF between the structure acceleration at midspan and a force applied at a point
x, considering only the fundamental vibration mode, is defined as follows
being
the circular natural frequency of the 1st vibration mode of the structure in rad/s,
the Laplace transform of the applied force acting on the structure, and
the Laplace transform of the structural acceleration at midspan, where
denotes the Laplace transform of the structural vertical displacement. Additionally,
is the mode shape of a simply supported beam that considers the variation of the pedestrian position
x, so the following expression is employed
For the model of the person, mass
, natural frequency
and damping ratio
of the human body are considered. Also, the human driving force (
) is accounted for via a pair of action-reaction forces acting simultaneously on both the footbridge and the pedestrian at a location
x. Thus, the ground reaction force is equal to the sum of the actuator force and the forces caused by the spring and damper of the human system. The TF between
, which is the force generated by the humans without including the force transmitted to them due to the structure movement, and the human driving force is presented below
where
is the circular frequency of the body in rad/s, and
is the associated damping ratio of the human.
, which is the input force to the
model, can be defined as follows
where the values of
are not the standard
as
affects both, the human body and the structure. The TF between the human interacting force (
) applied at location
x, which is the force transmitted due to the structure movement, and the structure acceleration at midspan is defined by the following expression
Further explanation about the presented TFs can be found in Díaz et al. [
24].
4.6. Identification of the HSI Model
Based on the experimental 1s RMS acceleration, presented in
Section 3.3, the dynamic parameters of the human body and the GLFs coefficients for the first four harmonics of a walking pedestrian are identified herein. Again, an optimization problem was formulated employing a single-objective approach, so the employed expression is as follows
being
the RMSE between the experimental and numerical 1s running RMS,
the parameters to be obtained, and
and
the lower and upper limits, respectively.
For the identification, the model of the structure was assumed to present an equivalent modal mass (
) of 405 kg and a natural frequency (
) of 7.63 Hz, based on the results from the calibrated FE model (
Section 4.3). Also, 1.55% was considered as damping ratio of the structure (
), considering the experimental result from
Section 3.2. The velocity of the MSDA system, which represents the pedestrian, was set equal to
(
Section 3.3). The lower and upper limits for the properties of the human body were based on the mean mass value obtained among the test subjects shown in
Table 2 (70.8 kg) and values reported in literature [
26]. Thus, the search domain for the seven
parameters to be determined were:
Human body: kg, Hz, and .
Load factors: , , and .
The GA, available in MATLAB [
40], was used to solve the optimization problem. An initial population size of 20, a fitness limit of 10
, and a maximum number of generations of 100 were considered. Taking advantage of the simple HSI model based on the closed-loop TF
, one hundred runs were performed (GA1–GA100). From the results, 25 solutions were disregarded as valid outcomes given the achieved value of the objective function
was greater than 5%.
Figure 11 displays the RMSE obtained in each run. Accounting for the remaining 75 outcomes, a single solution was calculated by averaging the values of the obtained
parameters. Hence, the SDOF MSDA system was defined using the following information:
kg,
Hz,
%,
,
,
, and
.
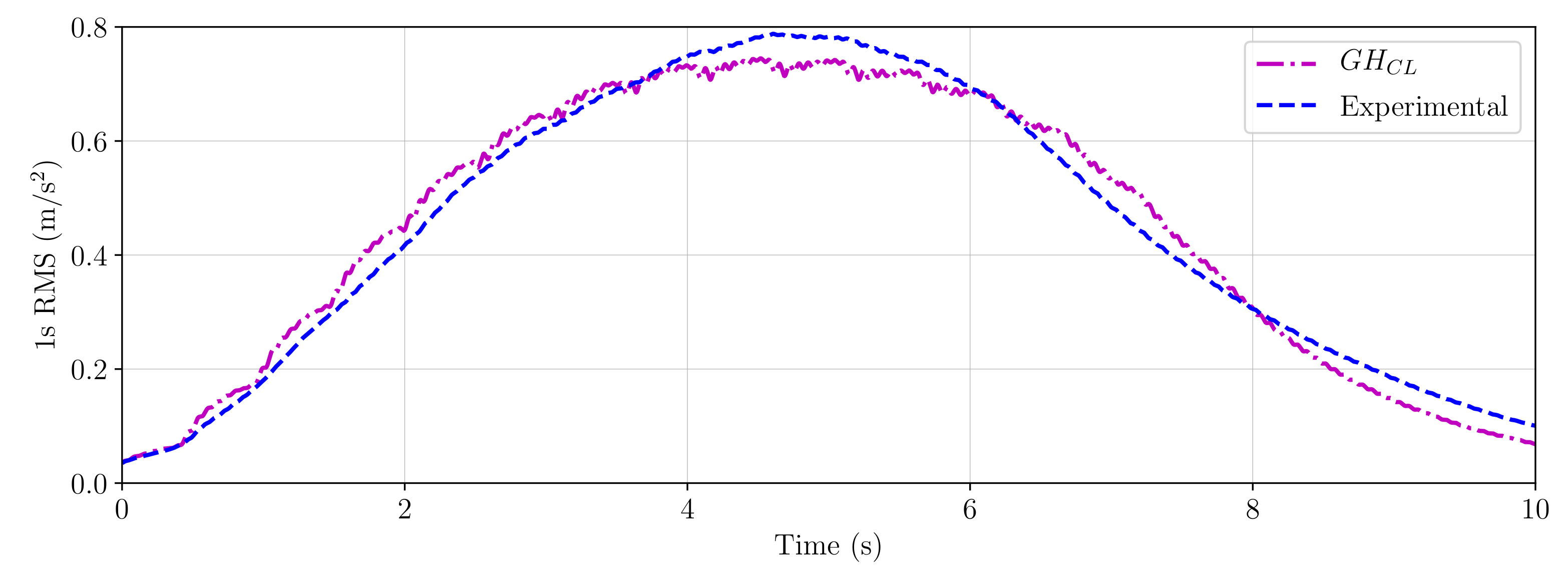
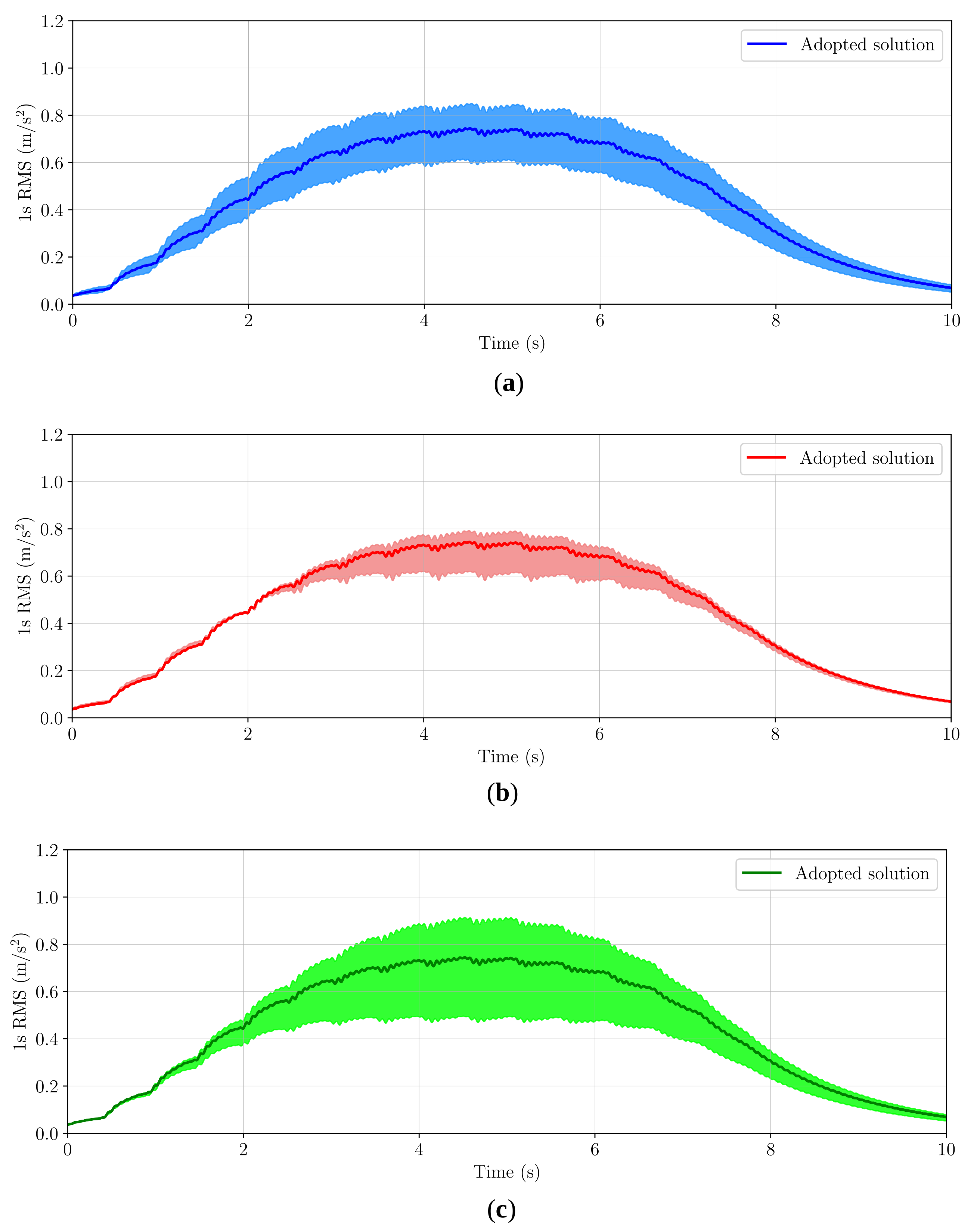
Figure 12 displays the experimental outcomes and the numerical outputs obtained from the identified HSI model (
). The RMSE between both curves was 3.4%. In comparison with the results calculated using the MF model (
Figure 9), the prediction of the real response of the footbridge was clearly improved after adopting the SDOF MSDA system to represent a walking pedestrian.
6. Conclusions
An ultra-lightweight FRP footbridge, whose linear mass is only 80 kg/m, has been been considered as benchmark structure to identify a HSI model, in which a walker is described via a MSDA system. Parameters of this model have been derived from an optimization problem which minimised the difference between experimental results and numerical outputs from a closed-loop TF of the coupled human-structure system.
As the simply supported structure exhibited significant vertical vibrations due to a single pedestrian, who walked over the bridge synchronising the fourth harmonic of the action with the bridge’s fundamental frequency, the proposed HSI model considers load factors of the first four harmonics of the human activity (walking). Furthermore, to determine the influence of the HSI model on the dynamic response of the FRP footbridge, a parametric analysis varying the parameters of the MSDA system has been performed. The results, which agree with previous observations, showed that the damping ratio of the body is a relevant parameter, as well as the load factor associated to the harmonic synchronised with the natural frequency of the structure.
The identified MSDA system may be used as a first approach to predict properly the dynamic response of other lightweight composite pedestrian structures affected by higher harmonics of human-induced loads. In the future, the proposed model will be extended to predict the structural response under crowd-induced loads. Also, its results will be used as a benchmark to develop simplified methods to account for interaction phenomenon avoiding the use of biodynamic models of the human body.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}