1. Introduction
Since the invention of atomic force microscopy, amplitude modulation (AM-AFM) is known as the most common mode of imaging various types of samples in dynamic mode measurements of AFM. Besides the relative ease of calculating measurements, AM-AFM can provide a wide range of information, such as topography, stiffness, dissipation, and material composition in a single-pass measurement [
1,
2,
3]. Unlike contact mode AFM, AM-AFM provides topographical measurement, with a possibility of compositional mapping that includes a lower chance of damaging surfaces [
1,
2,
4]. In a conventional AM-AFM measurement, the cantilever is excited at, or near, resonance frequency (i.e., typically the first eigenmode frequency) while the tip–surface distance is modulated by either moving the sample in Z direction or moving the base of the cantilever to maintain a constant oscillation amplitude. The amplitude signal is used to extract the topographical measurement while the phase signal is used for material characterization purposes [
2].
Although AM-AFM can provide some immediate advantages compared to contact mode or other advanced dynamic modes of AFM, it does not provide a direct quantitative measurement of mechanical properties of materials, especially if they are viscoelastic polymers. During the past few decades, there have many studies to show how one can extract quantitative properties of materials from just the amplitude and phase signals of AM-AFM images [
5,
6,
7]. Firstly, these attempts require extensive mathematical models to be used to calculate the material properties. Secondly, they require measurements at various oscillation amplitudes, setpoint values, and different tip velocities. Since most of the samples that are of high importance in these measurements are delicate samples, multiple measurements in the same area over the surface might cause permanent damages. Therefore, it remains challenging to obtain reliable and consistent material properties from AM-AFM measurements. A relatively new approach has focused on distinguishing conservative and dissipative tip–sample force interactions in AM-AFM [
8,
9]. In doing so, quantities known as virial and dissipated were defined and used in different studies [
6,
8,
10]. Although it is still unknown how one can directly relate virial to a mechanical property of a surface, virial is commonly related to the stiffness of tip–sample forces observed by the cantilever while dissipated power is known as energy loss in a full cycle [
7]. This method can separate the effect of each category of forces; however, it requires accurate measurements of oscillation amplitude and probe characteristics to be a reliable measurement technique. Additionally, if a higher eigenmode is used to observe compositional contrasts in phase channel, the calibration process becomes more sophisticated.
Recently, studies were done that implemented a more general and straightforward method known as loss tangent (
) measurements [
11,
12]. The
quantity is a dimensionless value that is processed as an image (i.e., observable) during a conventional AM-AFM mode. This quantity is defined as the ratio of the dissipative and conservative energy contributions during each oscillation cycle of the probe. Although the value does not provide separate quantities for conservative and dissipative energies, the ratio can provide insightful information about the sample under study. Based on the study by Cleveland et al., it was found that the dissipated power
of the cantilever driven at the fundamental resonant frequency and the phase lag angle can be related as shown in Equation (1) [
8]:
where
is the free oscillation amplitude,
is the resonant frequency (i.e., first eigenmode in this case),
is the spring constant of the cantilever, and
is the quality factor. The total energy dissipated per oscillatory cycle
of the cantilever can be written as Equation (2).
where
is the period of an oscillation cycle. Although there can be many sources for dissipation of energy within an oscillation (such as capillary forces, electrostatic charges, or magnetic forces), in a controlled setting, it is assumed to be due to the viscoelastic interaction and the hysteresis in the surface adhesion interaction between the tip and surface. Therefore, the dissipated power can be also written as
and the stored power of the oscillating cantilever can be written as
Because of this relationship, Proksch and Yablon showed that the
can be directly found by amplitude and phase signals, so it can be written as [
11]:
It should be noted that the ratio of instantaneous oscillation amplitude (
) to free oscillation amplitude (
) make this relationship independent of actual amplitude values in length units. Therefore, Equation (3) can be re-written as the following, where
and
represent the voltage values of instantaneous oscillation amplitude and free oscillation amplitude, respectively.
It should be noted that based on the Equation shown in (4), the
can be found without the need for accurate calibration of actual amplitude values. Although there are many studies that have done different types of analysis on this topic, there is still a gap in the field to understand the true effect of tip–velocity (i.e., excitation frequency) on the observable aspects in loss tangent AM-AFM measurements. Procksh et al. have examined the effect of oscillation amplitudes [
11]. Nguyen et al. showed that the AM-AFM loss tangent measurements overestimated the values compared to bulk measurements [
13]. In a recent study, Nguyen H. K. et al. have also investigated the effect of tip radius on the measured values [
14]. It was found that ultra-sharp tips are advantageous to eliminating the unwanted dissipative processes. In this study, we focus on the effect of excitation frequency and the penetration depth caused by the tip trajectory on different types of materials and compare them with published bulk material properties. Yablon et al. have suggested using cantilevers with frequencies over 300 kHz [
12,
13,
15]. A practical method to do so is using the higher eigenmode of a typical AM-AFM cantilever to achieve this guideline. However, it is still unknown how the penetration of the tip into soft matter can play a role in the observable aspects of loss tangent measurements.
3. Results
We investigated the effect of excitation frequency on the tip penetration through different surfaces in the context of loss tangent AFM measurement. It is known that higher excitation frequencies can cause higher tip penetration through surfaces [
16,
17]. As mentioned, the recent studies in loss tangent AFM field have shown that the higher tip radius can cause higher dissipation, hence, higher loss tangent values. However, these studies have not considered the effect of tip penetration on the surface and the consequence of
effective tip radius on these measurements.
In this work, we examined different types of samples in a systematic way in order to experimentally find the effect of these parameters on loss tangent AFM measurements.
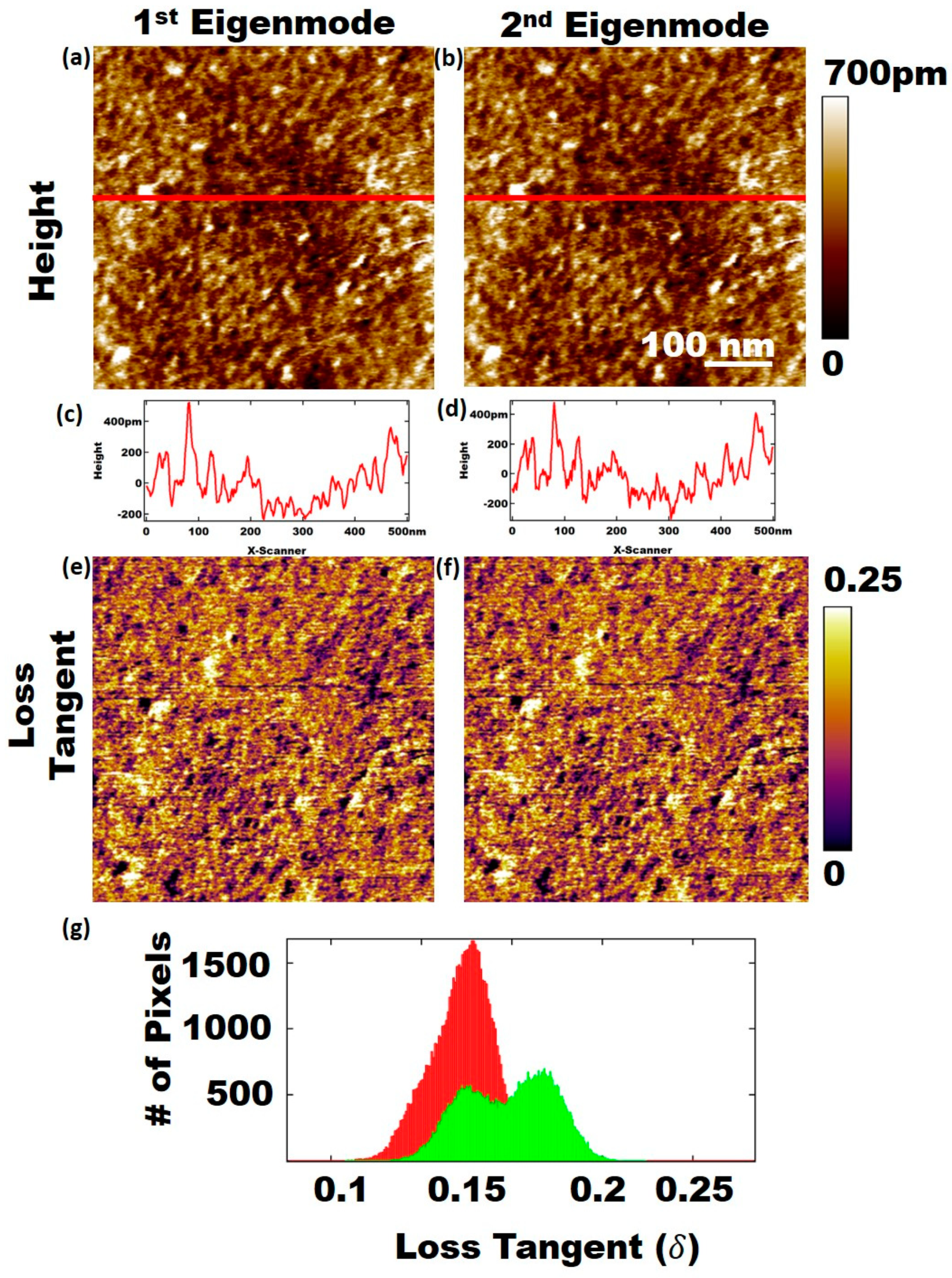
Figure 1 represents two sets of experiments using AM-AFM mode, where the amplitude and phase signals are used to generate the loss tangent images. The first round of measurements, shown in the left column of
Figure 1, was conducted by exciting the cantilever in AM-AFM with its first eigenmode frequency. In contrast, the second round of measurements, shown in the right column of
Figure 1, was performed by exciting the cantilever in AM-AFM with its second eigenmode frequency. The sample understudy in
Figure 1 is Sapphire, which is known as a flat and stiff surface. Therefore, one can assume there is no tip penetration in these studies due to surface softness.
Figure 1a,b represent topography (i.e., height) images of the same area of the sample conducted with 1st and 2nd eigenmode, respectively. Since the sample is relatively flat, scan lines are shown in
Figure 1c,d in order to quantitatively compare the differences. Besides the fact that
Figure 1d has a larger number of peaks in the scan line (which can be due to imaging conditions),
Figure 1c,d show relatively similar topographies as expected.
Figure 1e and f show the phase images of the same measurements explained in
Figure 1a,b. Although qualitatively they seem similar, the phase images are used to generate loss tangent measurements, which are represented by a histogram in
Figure 1g. In this study, it is clear that when we were imaging with the first eigenmode frequency, higher values of
were observed. Additionally, there appear to be two peaks of loss tangent values shown in green histograms of
Figure 1g when imaged by the first eigenmode. This observation is linked to the thin layer of humidity that can exist during measurements. Although there are no tip penetrations on this sample, due to higher stiffness of the second eigenmode, the thin layer of humidity can be compressed (or not observed) by the tip–sample force interactions. Consequently, a single peak of loss tangent values is observable for the second eigenmode, which is less dissipative as well.
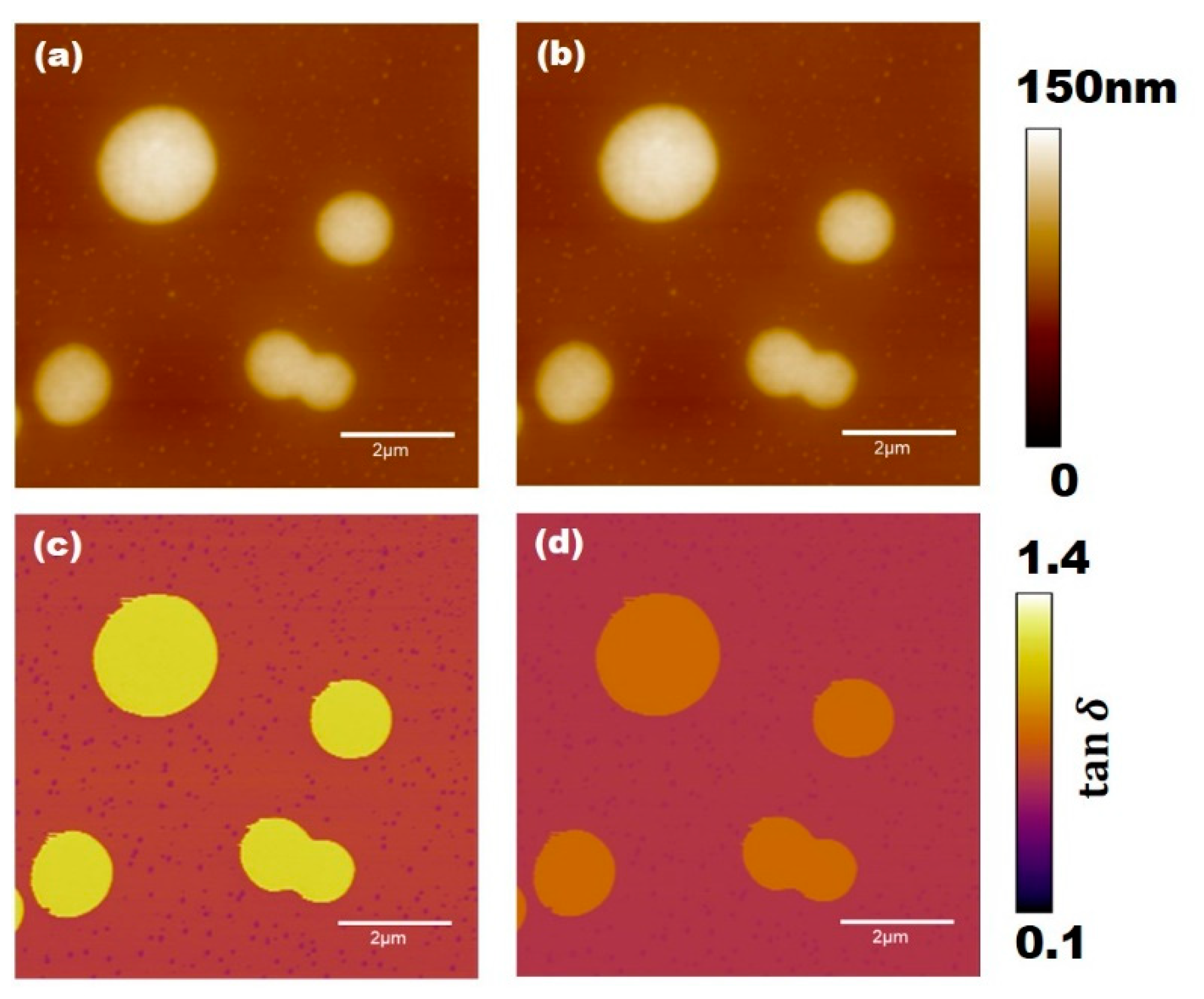
In order to study the effect of tip penetration, we conducted a similar study on a co-polymer sample system (PS-LDPE). PS has an elastic modulus around 2 GPa while LDPE is known to be a softer polymer with 0.1 GPa. This sample allows us to know if there is any difference with the way polymers respond to loss tangent AFM imaging with the first or second eigenmode frequencies.
Figure 2a,b show the same area on the sample that used the 1st eigenmode and 2nd eigenmode excitation frequencies, respectively.
Figure 2c,d represent the loss tangent AFM image done by 1st and 2nd eigenmode excitation frequencies, respectively. It is clear from these images that when we excite the cantilever with higher frequency, we see less dissipation compared to when we used the first eigenmode frequency. Although the second eigenmode frequency has a higher stiffness, the tip penetration is lower. Therefore, the effective tip radius results in less dissipation. It should be mentioned that this finding is consistent with the recent findings presented in Nikfarjam et al.’s work as well related to the tip penetration by higher eigenmodes [
16].
Although
Figure 1 and
Figure 2 provided a useful insight in regard to selection of excitation frequency for loss tangent AFM images, questions remain about the effect of the oscillation amplitudes, which have a more important role in defining the tip penetrations on samples. In order to systematically study this effect, a Teflon tape is stretched and mounted on a glass slide. Additionally, we performed four different sets of experiments. For each excitation frequency (i.e., either first or second in this case), two different free oscillation amplitudes are selected so that the product of stiffness and oscillation amplitudes stay constant (i.e.,
). This is done by understanding the equation of motion of the cantilever in normalized form [
16,
18,
19]:
where
is the free amplitude,
is the dimensionless tip position with respect to the cantilever base,
is the dimensionless tip–sample distance (
) where
is the position of the cantilever above the sample,
is the dimensionless time,
is the cantilever force constant, and
is the tip–sample interaction force. We made the substitution
[
2], where
is the amplitude of the excitation force, and we combined the damping and excitation terms with the factor
. The last term on the right-hand side represents the tip–sample force interaction that is normalized by the product of
. Therefore, depending on the excitation frequency at which we are shaking the cantilever, its spring constant can change. However, the effect of tip–sample force interactions on the dynamics of the cantilever can be controlled by adjusting the oscillation amplitude.
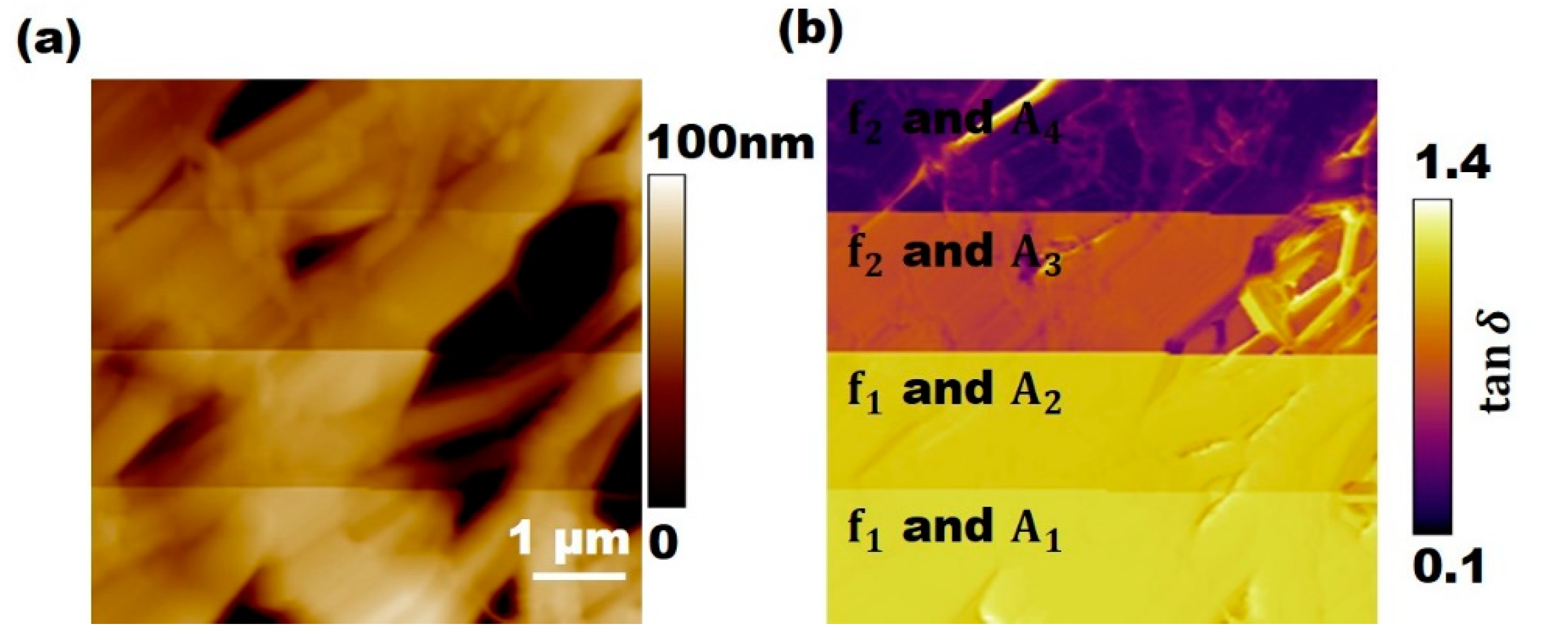
Figure 3 represents a set of studies where the effect of excitation frequency and oscillation amplitude on the measured loss tangent values of a PTFE sample is shown.
Figure 3a represents the topography or height image of the measurements. From the bottom to the top of the image, the imaging conditions have been modified. The lowest portion of the figure represents the measurements using first eigenmode frequency and oscillation amplitude of 50 nm. In the second portion of the image, the excitation frequency is kept constant; however, the oscillation amplitude is increased to 100 nm. Based on this change, we can see that the color in the loss tangent shows a similar result compared to previous case. However, when the excitation frequency is changed to the second eigenmode frequency, the loss tangent value is decreased (the colors in
Figure 3b get darker). This trend continues when we increased the oscillation amplitude as well. This is an indication that the tip is penetrating less into the surface and therefore dissipating less energy. Based on this study, it can be concluded that if one is after loss tangent measurements of soft samples, measuring with the higher eigenmode frequencies while controlling the oscillation amplitudes can be advantageous. This can be extremely important for imaging sensitive samples, such as biological cells.
In order to have a reliable characterization technique by AFM, a common approach is studying the contrast in the observable aspects on a sample where a portion of the sample can be considered as reference material.
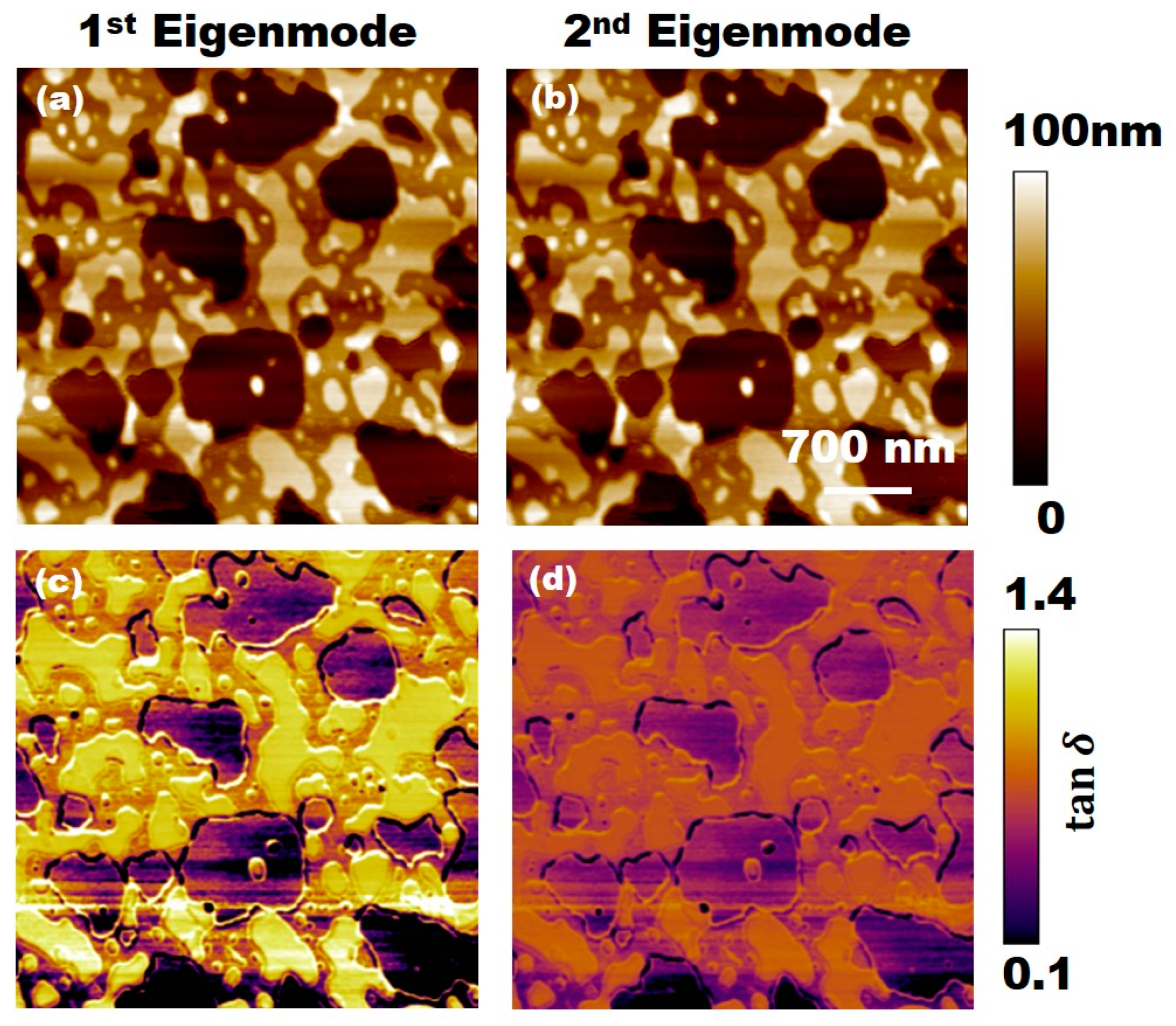
Figure 4 provides this set for this study. The sample shown in
Figure 4 is a thin film of PS polymer that is intentionally spin-coated on a silicon wafer at high humidity to create the islands shown. The high humidity has caused some portions of the silicon wafer to be exposed during the measurements as a reference material that has very high stiffness and very low viscoelasticity. Therefore, we should expect a theoretical value of
for those portions to be close to zero. The left column in
Figure 4 provides the height (
Figure 4a) and loss tangent image (
Figure 4c) using the first eigenmode frequency while the right column in
Figure 4 represents the same measurements using the second eigenmode frequency. Although there is no obvious difference in topography measurements (
Figure 4a,b), there is a major difference in loss tangent images shown in
Figure 4c,d. The average loss tangent value is higher on the sample when imaged by the first eigenmode frequency compared to second eigenmode frequency. It should be noted both measurements are done on the same area of the same sample; therefore, one would expect identical results. However, it is clear that the second eigenmode measurements are showing less dissipation. With that said, if the aim is to distinguish the two different samples, imaging with the first eigenmode might be better since it can provide higher contrast. However, that comes with the disadvantage of penetrating more into the surface. If a sample is soft, imaging with the first eigenmode with large oscillation amplitudes can cause surface damages. On the other hand, although the second eigenmode stiffness is higher than the first one, due to lower oscillation amplitudes, imaging with the second eigenmode can be advantageous since it has been shown it can provide less dissipation of energy and have less penetration of the surface.




{kind=link}
{kind=link}
{kind=link}
{kind=link}



