
A New Method for Haptic Shape Discriminability Detection

 , ,
, ,
Abstract
:1. Introduction
2. Angle Sorting
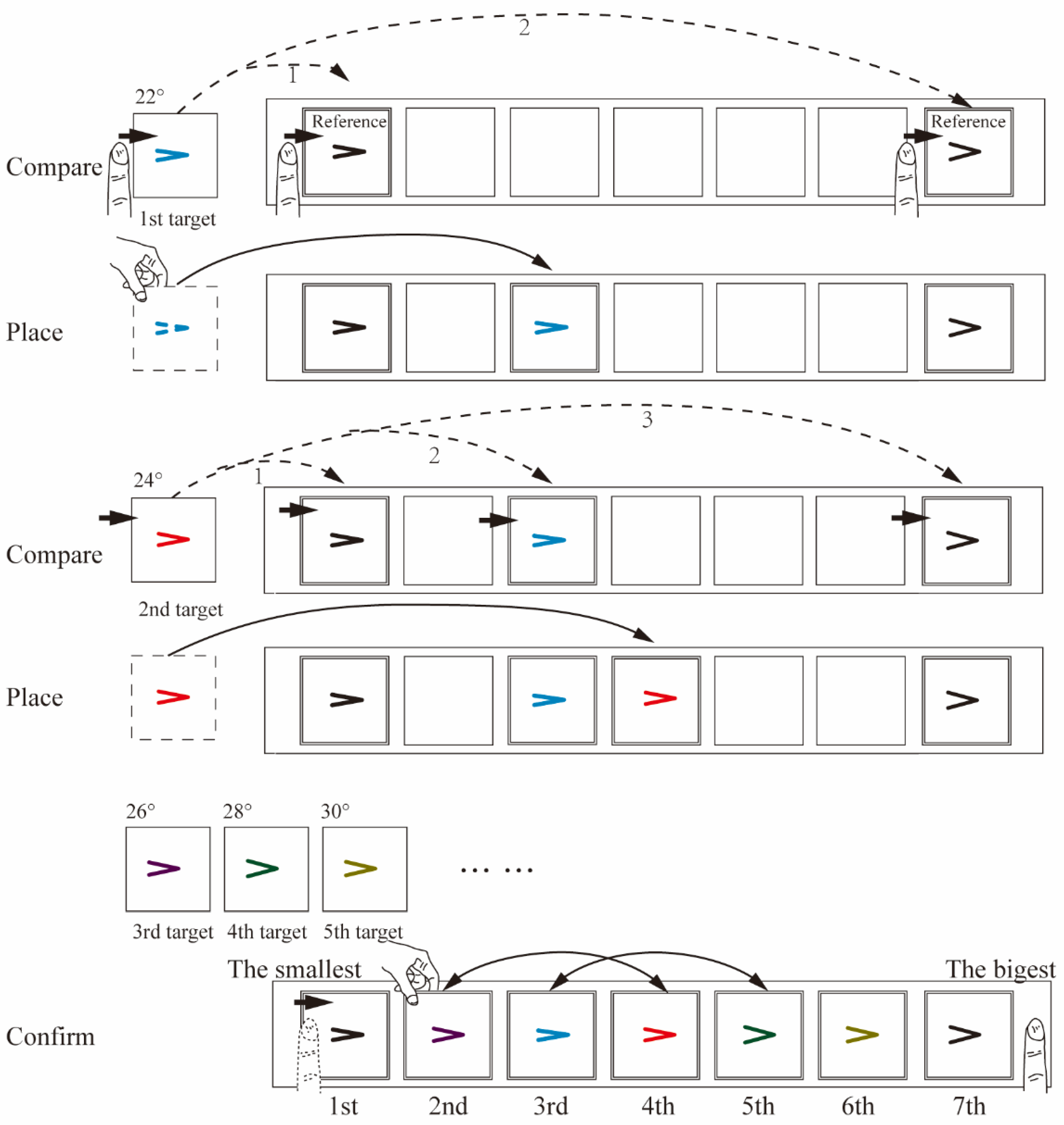
2.1. Procedure of Haptic Angle Sorting
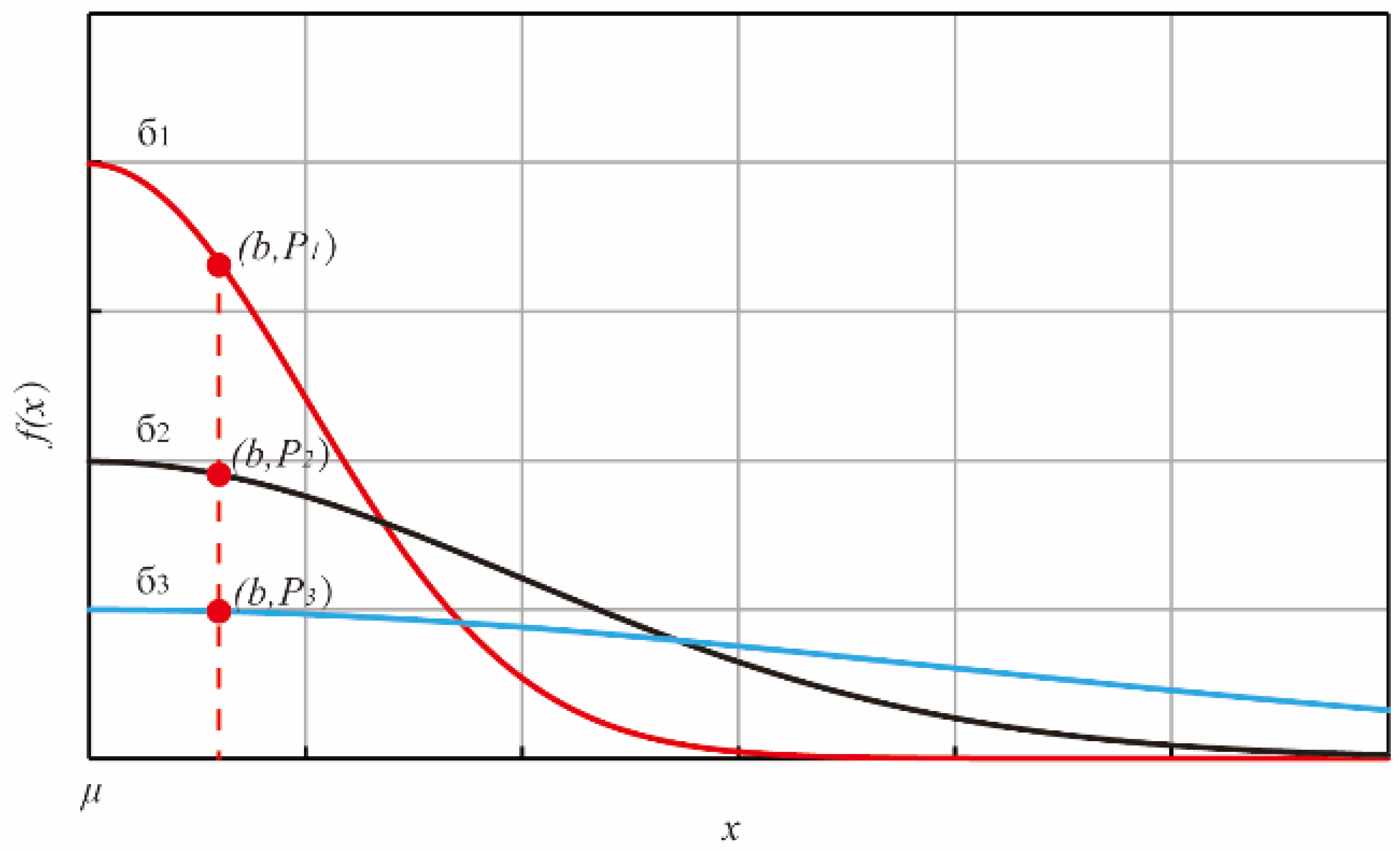
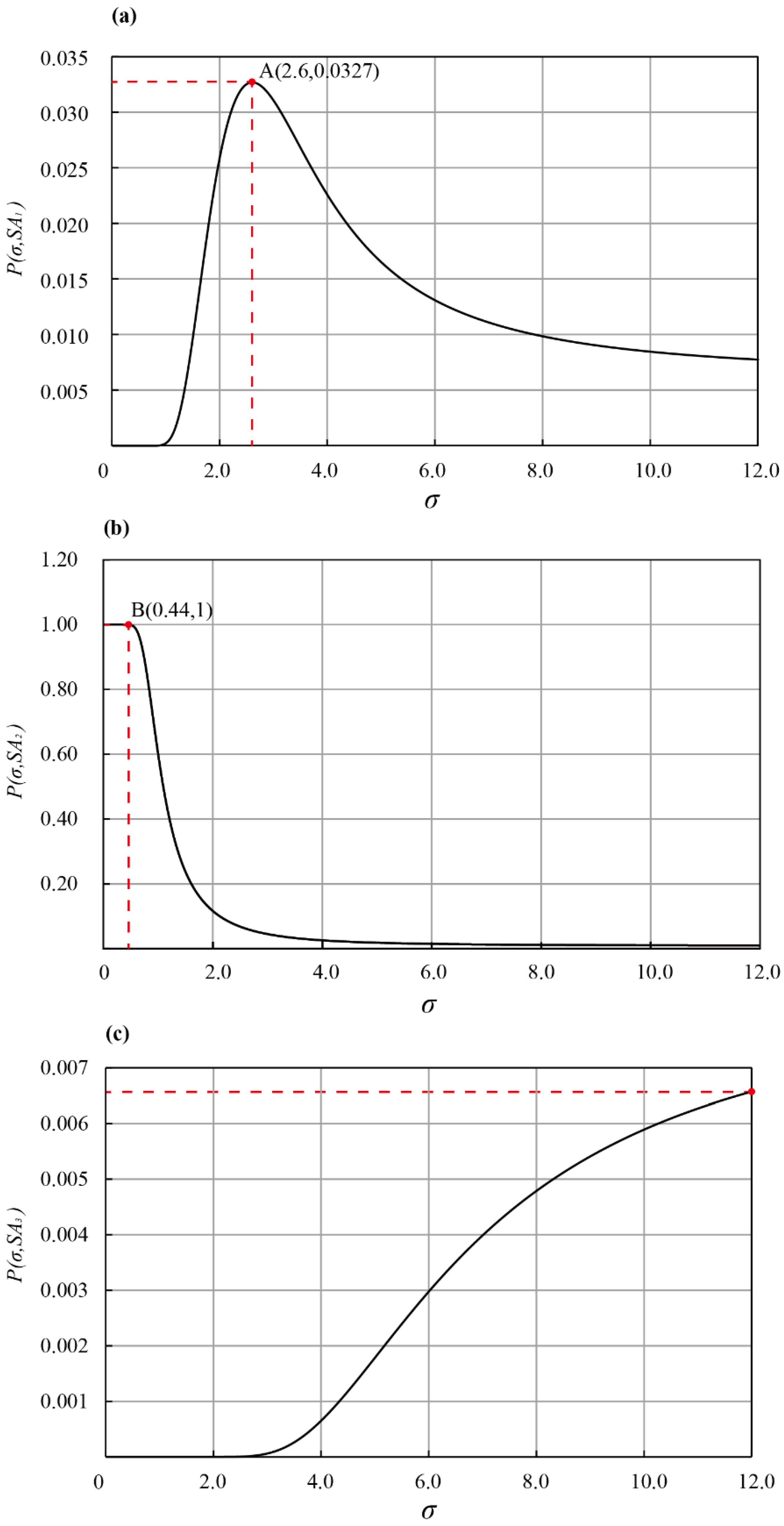
2.2. Estimation of Standard Deviation
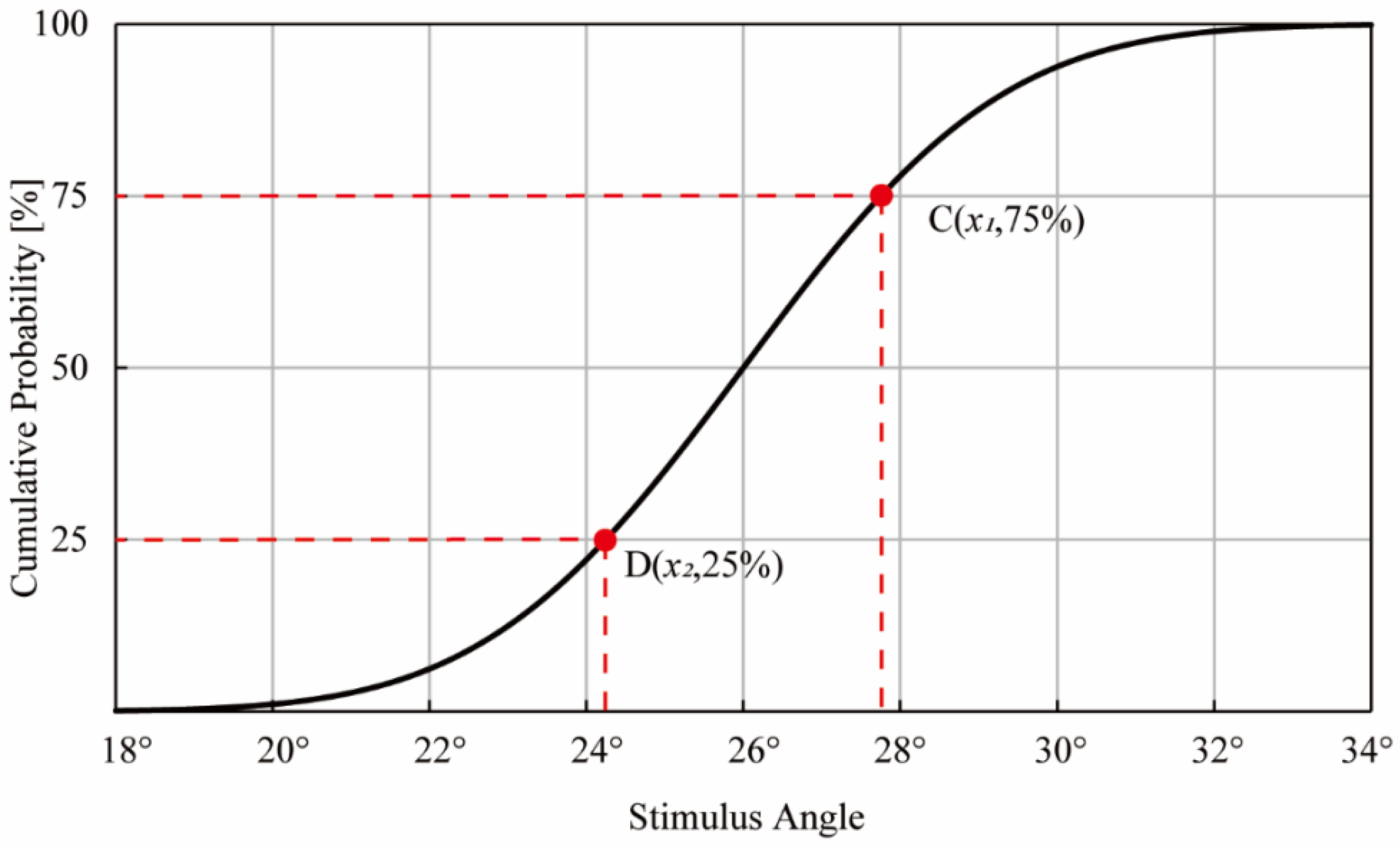
2.3. Angle Discrimination Threshold
3. Angle Sorting System Description
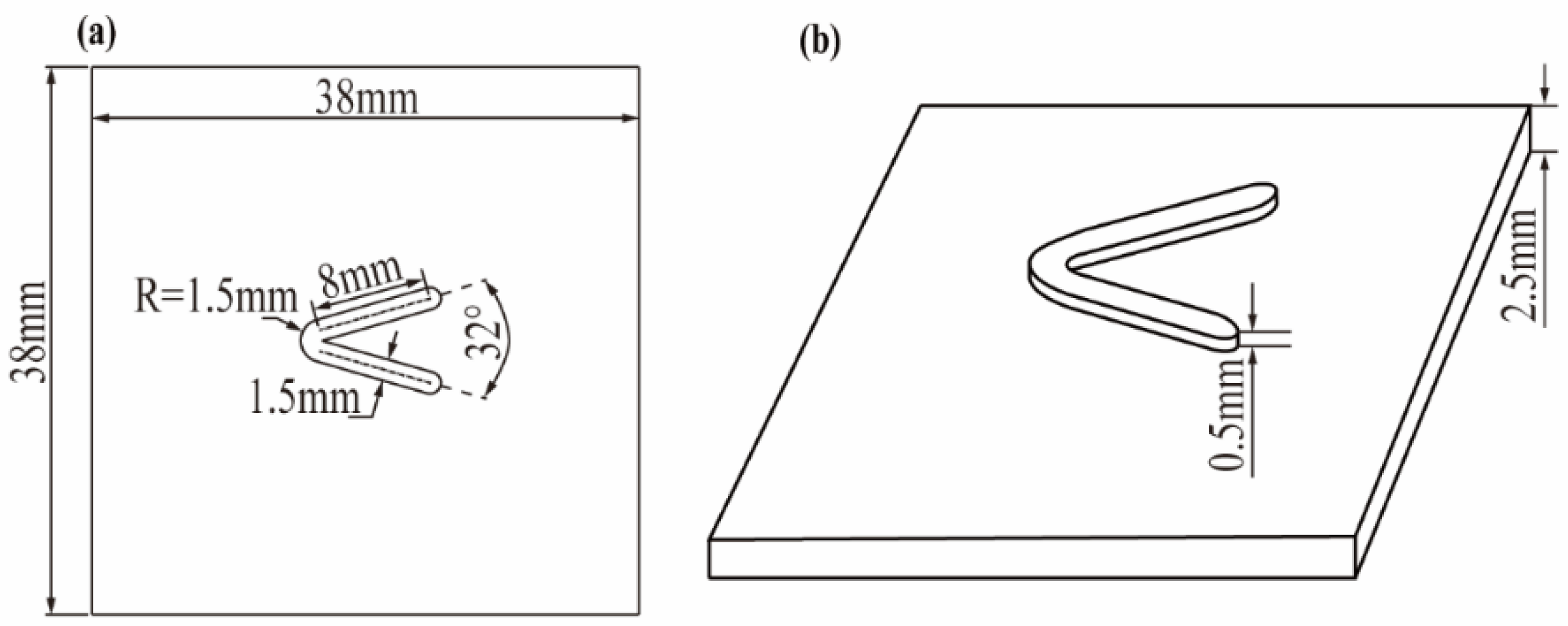
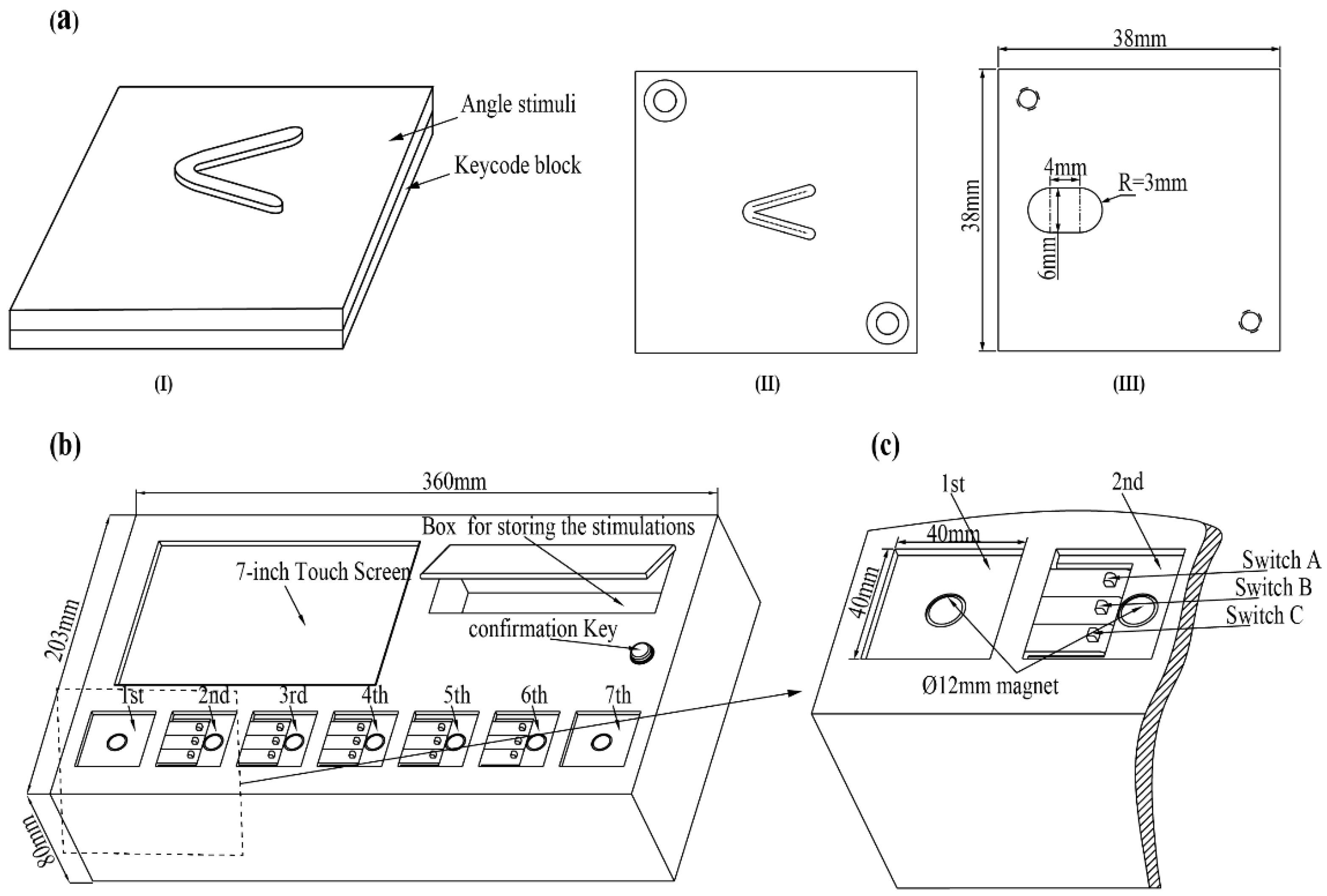
3.1. Haptic Pattern
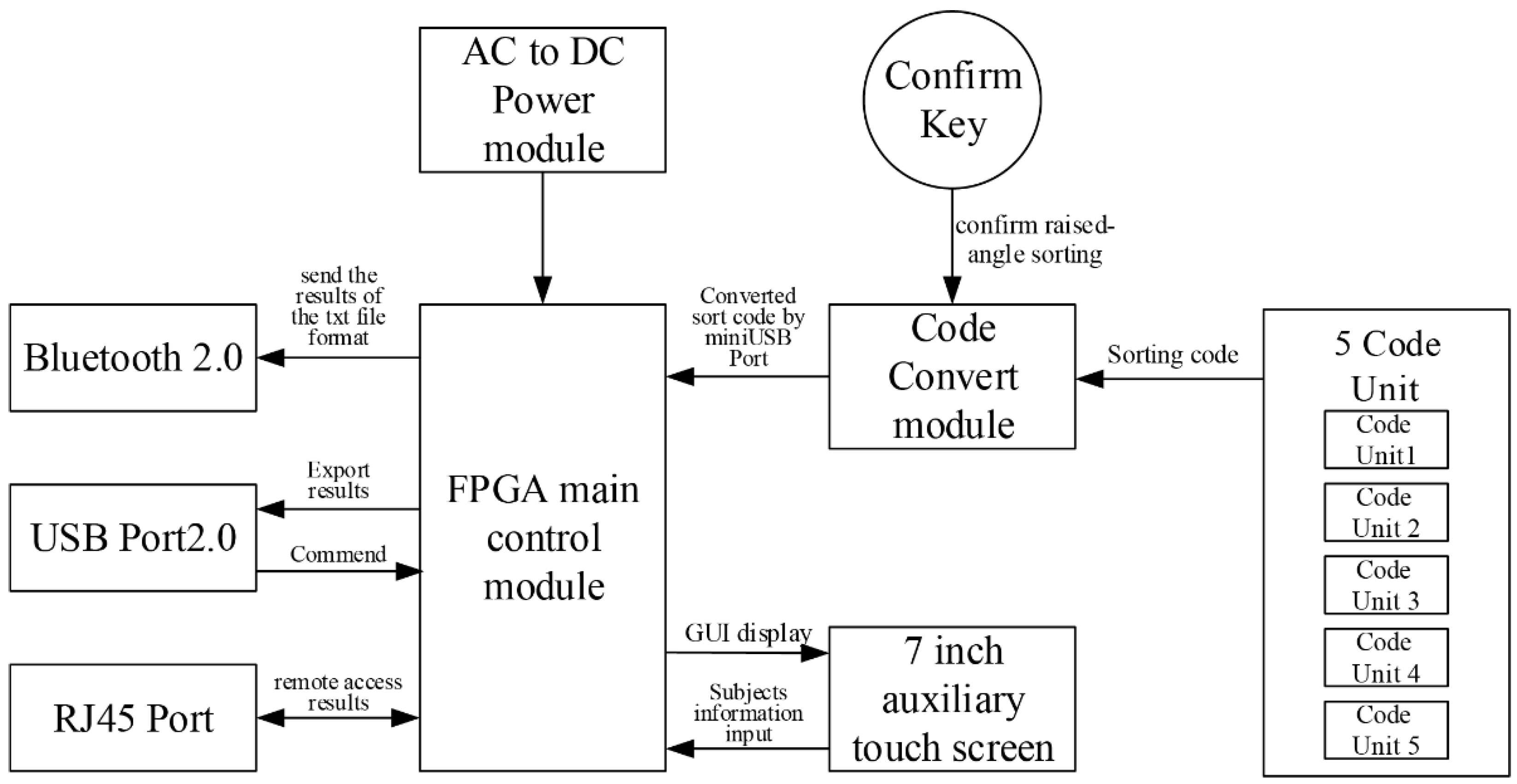
3.2. Design of the Haptic Angle Sorting Device
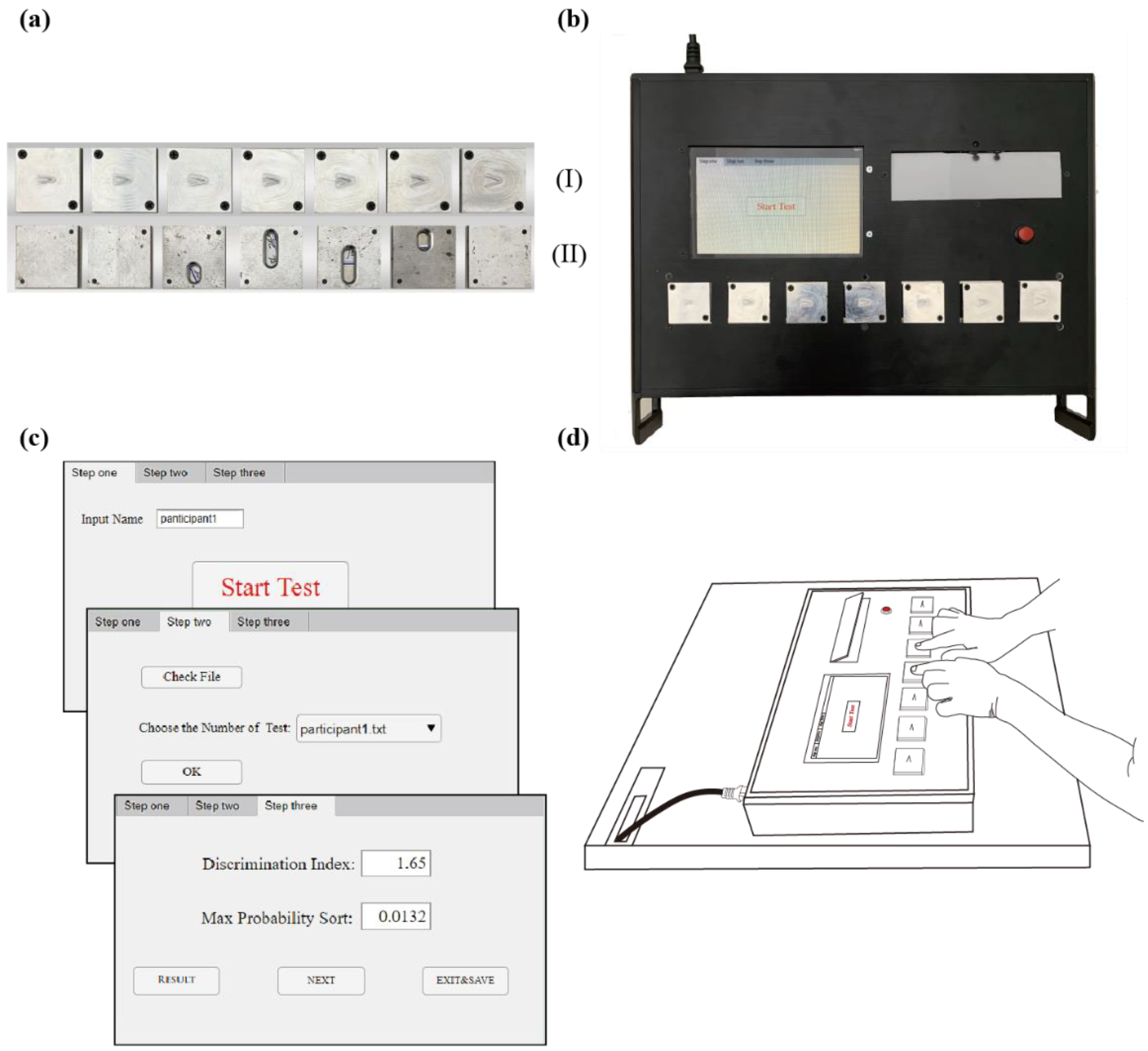
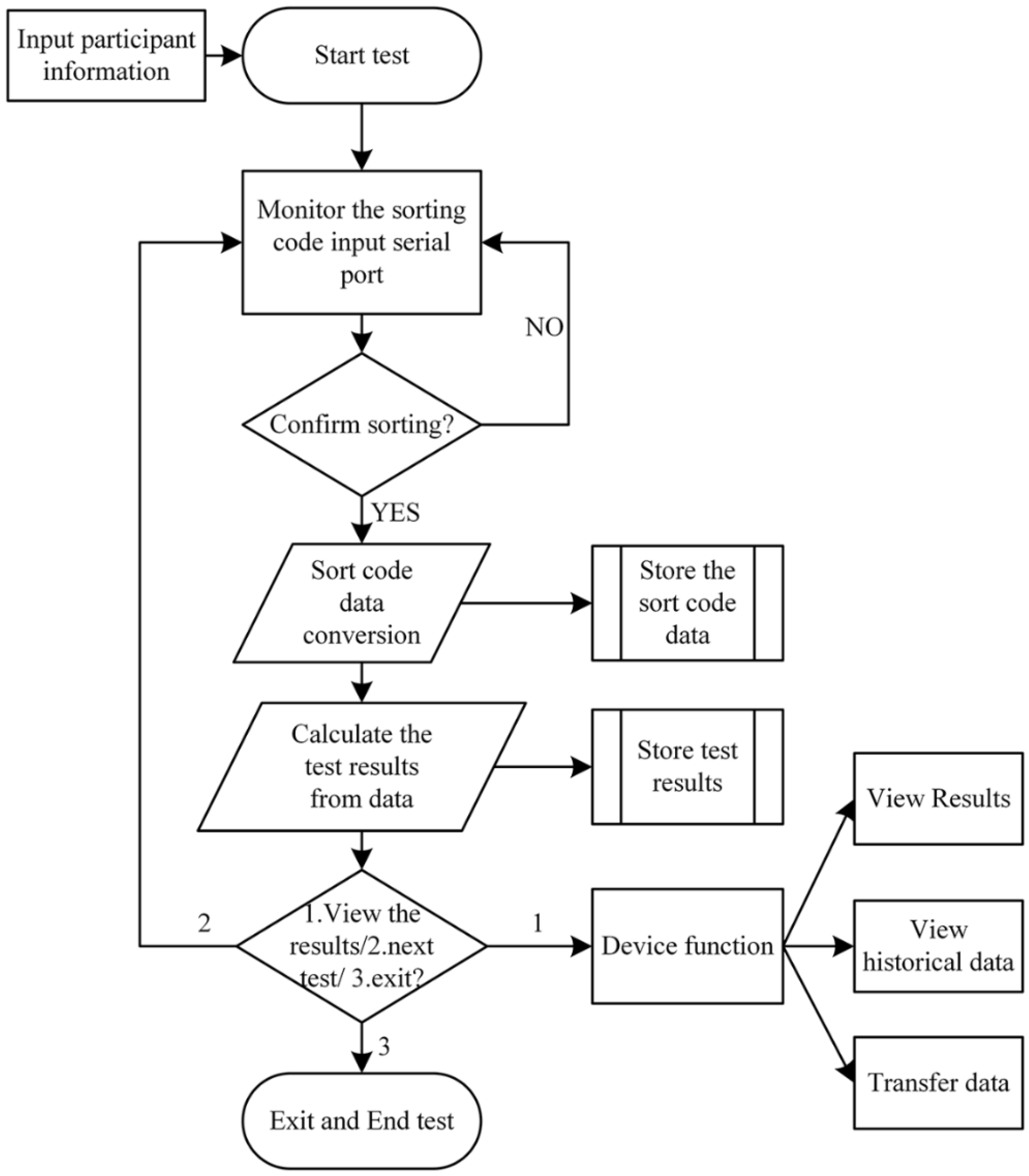
3.3. System Software
3.4. System Implementation
4. System Evaluation
4.1. Participants
4.2. Methods
4.3. Data Processing and Analysis
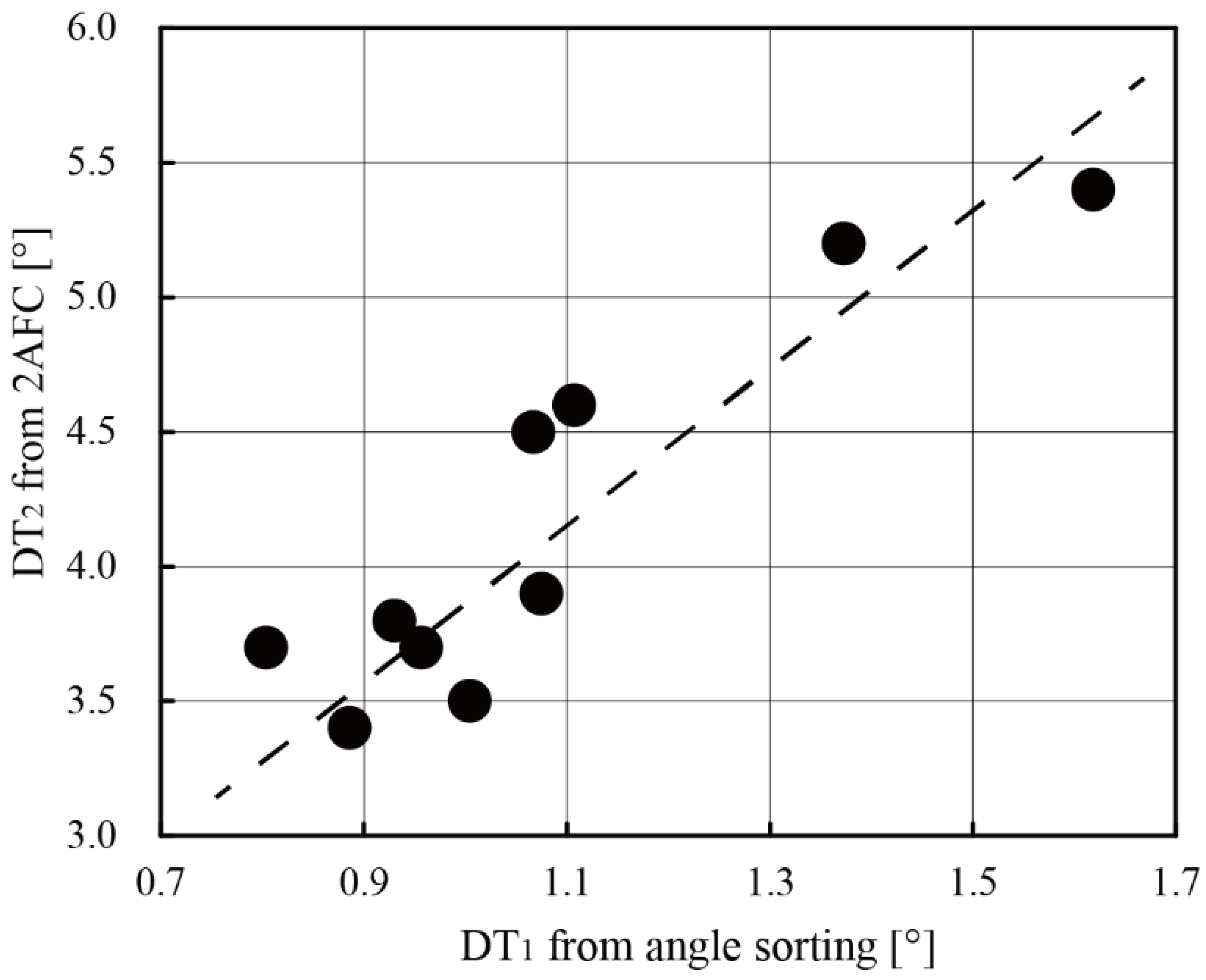
4.4. Results and Discussion
5. Comparative Evaluation between Young and Old Groups
5.1. Participants
5.2. Methods
5.3. Data Processing and Analysis
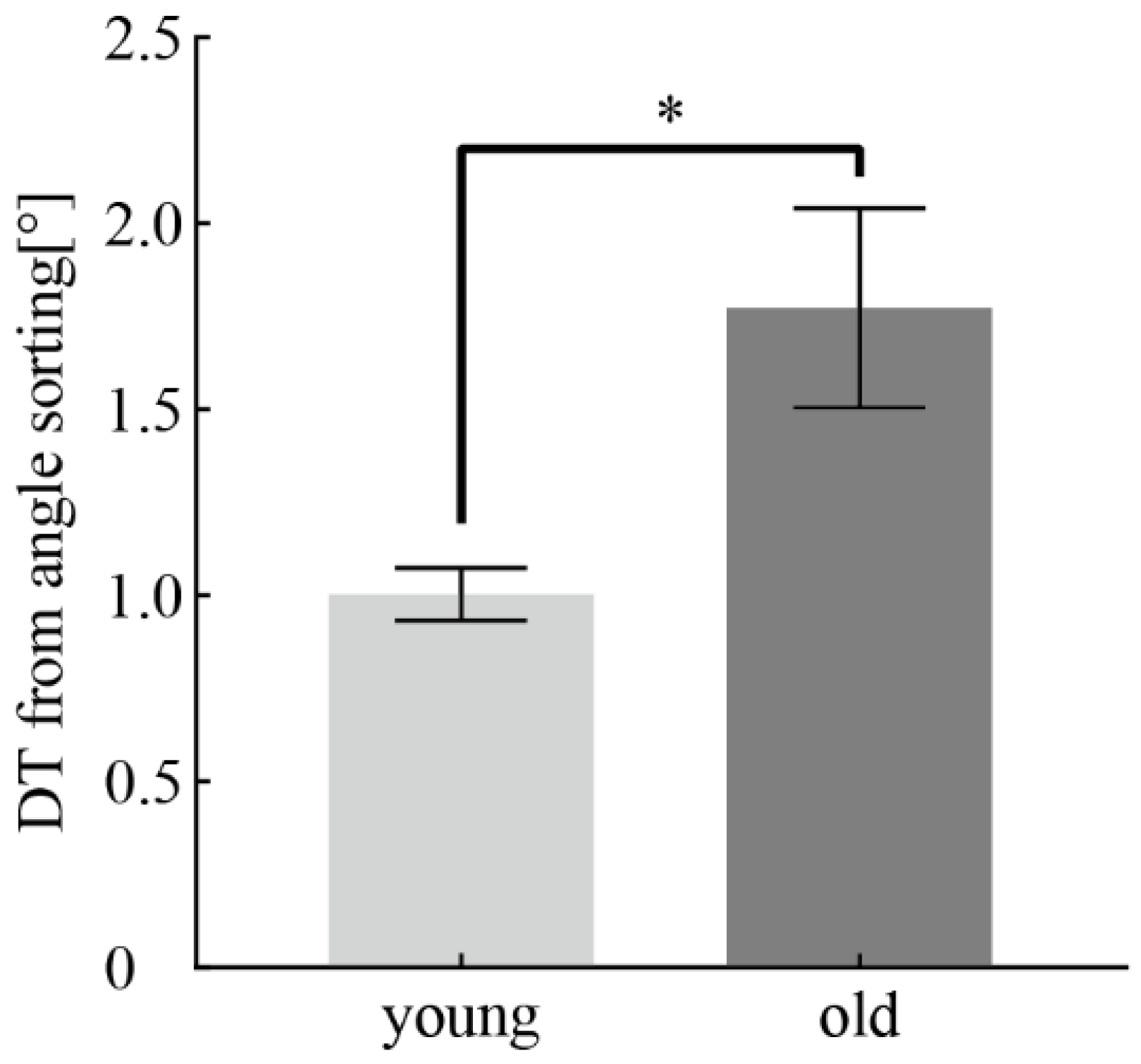
5.4. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2AFC | Two-Alternative Forced Choice |
| 2-D | Two-Dimensional |
| MCU | Microcontroller Unit |
| AC | Alternating Current |
| DC | Direct Current |
| FPGA | Field Programmable Gate Array |
| SA | Standard Angle |
| CAs | Comparison Angles |
| The result of th time Angle Sort | |
| Discrimination Threshold |
References
- Kalisch, T.; Kattenstroth, J.C.; Kowalewski, R.; Tegenthoff, M.; Dinse, H.R. Cognitive and tactile factors affecting human haptic performance in later life. PLoS ONE 2012, 7, e30420. [Google Scholar] [CrossRef] [Green Version]
- Blatow, M.; Nennig, E.; Durst, A.; Sartor, K.; Stippich, C. fMRI reflects functional connectivity of human somatosensory cortex. NeuroImage 2007, 37, 927–936. [Google Scholar] [CrossRef] [PubMed]
- Roland, P.E.; O’Sullivan, B.; Kawashima, R. Shape and roughness activate different somatosensory areas in the human brain. Proc. Natl. Acad. Sci. USA 1998, 95, 3295–3300. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Huber, L.; Yang, J.; Jangraw, D.C.; Handwerker, D.A.; Molfese, P.J.; Chen, G.; Ejima, Y.; Wu, J.; Bandettini, P.A. Layer-specific activation of sensory input and predictive feedback in the human primary somatosensory cortex. Sci. Adv. 2019, 5, eaav9053. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dowell, C.J.; Norman, J.F.; Moment, J.R.; Shain, L.M.; Norman, H.F.; Phillips, F.; Kappers, A.M.L. Haptic shape discrimination and interhemispheric communication. Sci. Rep. 2018, 8, 377. [Google Scholar] [CrossRef] [PubMed]
- Bodegård, A.; Geyer, S.; Grefkes, C.; Zilles, K.; Roland, P.E. Hierarchical processing of tactile shape in the human brain. Neuron 2001, 31, 317–328. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Molfese, P.J.; Yu, Y.; Handwerker, D.A.; Chen, G.; Taylor, P.A.; Ejima, Y.; Wu, J.; Bandettini, P.A. Different activation signatures in the primary sensorimotor and higher-level regions for haptic three-dimensional curved surface exploration. NeuroImage 2021, 231, 117754. [Google Scholar] [CrossRef]
- Yu, Y.; Yang, J.; Ejima, Y.; Fukuyama, H.; Wu, J. Asymmetric functional connectivity of the contra- and ipsilateral secondary somatosensory cortex during tactile object recognition. Front. Hum. Neurosci. 2018, 11, 662. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.; Yu, Y.; Kunita, A.; Huang, Q.; Wu, J.; Sawamoto, N.; Fukuyama, H. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: An fMRI study. Front. Hum. Neurosci. 2014, 8, 926. [Google Scholar] [CrossRef] [Green Version]
- Kitada, R.; Kito, T.; Saito, D.N.; Kochiyama, T.; Matsumura, M.; Sadato, N.; Lederman, S.J. Multisensory activation of the intraparietal area when classifying grating orientation: A functional magnetic resonance imaging study. J. Neurosci. 2006, 26, 7491–7501. [Google Scholar] [CrossRef]
- Bruce, M.F. The relation of tactile thresholds to histology in the fingers of elderly people. J. Neurol. Neurosurg. Psychiatry 1980, 43, 730–734. [Google Scholar] [CrossRef]
- Thornbury, J.M.; Mistretta, C.M. Tactile sensitivity as a function of age. J. Gerontol. 1981, 36, 34–39. [Google Scholar] [CrossRef]
- Yang, J.; Ogasa, T.; Ohta, Y.; Abe, K.; Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer’s disease. J. Alzheimers Dis. 2010, 22, 225–234. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Chen, G.; Zhang, J.; Yan, T.; Go, R.; Fukuyama, H.; Wu, J.; Han, Y.; Li, C. Tactile Angle Discrimination Decreases due to Subjective Cognitive Decline in Alzheimer’s Disease. Curr. Alzheimer Res. 2020, 17, 168–176. [Google Scholar] [CrossRef] [PubMed]
- Craig, J.C. Grating orientation as a measure of tactile spatial acuity. Somatosens. Mot. Res. 1999, 16, 197–206. [Google Scholar] [CrossRef]
- Craig, J.C.; Johnson, K.O. The two-point threshold: Not a measure of tactile spatial resolution. Curr. Dir. Psychol. Sci. 2000, 9, 29–32. [Google Scholar] [CrossRef]
- Shooter, D. Use of two-point discrimination as a nerve repair assessment tool: Preliminary report. ANZ J. Surg. 2005, 75, 866–868. [Google Scholar] [CrossRef]
- Yang, J.; Syafiq, M.U.; Yu, Y.; Takahashi, S.; Zhang, Z.; Wu, J. Development and Evaluation of a Tactile Cognitive Function Test Device for Alzheimer ’ s Disease Early Detection. Neurosci. Biomed. Eng. 2015, 3, 58–65. [Google Scholar] [CrossRef]
- Wu, J.; Yang, J.; Ogasa, T. Raised-angle discrimination under passive finger movement. Perception 2010, 39, 993–1006. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, Y.; Liu, Y.; Wu, J.; Go, R. Development and performance evaluation of automatic measuring apparatus for sorting haptic angle stimulus. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation, ICMA 2020, Beijing, China, 2–5 August 2020; pp. 1467–1472. [Google Scholar]
- Skinner, C.J.; Anderson, T.W. An Introduction to Multivariate Statistical Analysis. J. R. Stat. Soc. Ser. A 1985, 148, 164. [Google Scholar] [CrossRef]
- Thurstone, L.L. A law of comparative judgment. Psychol. Rev. 1927, 34, 273–286. [Google Scholar] [CrossRef]
- Green, D.M.; Swets, J.A. Signal Detection Theory and Psychophysics; Wiley: New York, NY, USA, 1966; Volume 1. [Google Scholar]
- Gibson, E.J.; Gibson, J.J.; Pick, A.D.; Osser, H. A developmental study of the discrimination of letter-like forms. J. Comp. Physiol. Psychol. 1962, 55, 897–906. [Google Scholar] [CrossRef]
- Loo, C.K.; Hall, L.A.; McCloskey, D.I.; Rowe, M.J. Proprioceptive contributions to tactile identification of figures: Dependence on figure size. Behav. Brain Res. 1983, 7, 383–386. [Google Scholar] [CrossRef]
- Klatzky, R.L.; Lederman, S.J.; Hamilton, C.; Grindley, M.; Swendsen, R.H. Feeling textures through a probe: Effects of probe and surface geometry and exploratory factors. Percept. Psychophys. 2003, 65, 613–631. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Toderita, I.; Bourgeon, S.; Voisin, J.I.A.; Chapman, C.E. Haptic two-dimensional angle categorization and discrimination. Exp. Brain Res. 2014, 232, 369–383. [Google Scholar] [CrossRef]
- Klatzky, R.L.; Loomis, J.M.; Lederman, S.J.; Wake, H.; Fujita, N. Haptic identification of objects and their depictions. Percept. Psychophys. 1993, 54, 170–178. [Google Scholar] [CrossRef]
- Wang, W.; Yang, J.; Yu, Y.; Wu, Q.; Takahashi, S.; Ejima, Y.; Wu, J. Tactile semiautomatic passive-finger angle stimulator (TSPAS). J. Vis. Exp. 2020, 2020, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Voisin, J.; Benoit, G.; Chapman, C.E. Haptic discrimination of object shape in humans: Two-dimensional angle discrimination. Exp. Brain Res. 2002, 145, 239–250. [Google Scholar] [CrossRef]
- Weder, B.; Nienhusmeier, M.; Keel, A.; Leenders, K.L.; Ludin, H.P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Exp. Brain Res. 1998, 120, 104–108. [Google Scholar] [CrossRef]
- Voisin, J.; Lamarre, Y.; Chapman, E.C. Haptic discrimination of object shape in humans: Contribution of cutaneous and proprioceptive inputs. Exp. Brain Res. 2002, 145, 251–260. [Google Scholar] [CrossRef]
- Voisin, J.; Michaud, G.; Chapman, C.E. Haptic shape discrimination in humans: Insight into haptic frames of reference. Exp. Brain Res. 2005, 164, 347–356. [Google Scholar] [CrossRef]
- Wijntjes, M.W.A.; Kappers, A.M.L. Angle discrimination in raised-line drawings. Perception 2007, 36, 865–879. [Google Scholar] [CrossRef]
- Wang, W.; Yang, J.; Yu, Y.; Wu, Q.; Yu, J.; Takahashi, S.; Ejima, Y.; Wu, J. Tactile angle discriminability improvement: Roles of training time intervals and different types of training tasks. J. Neurophysiol. 2019, 122, 1918–1927. [Google Scholar] [CrossRef]
- Johnson, K.O. The roles and functions of cutaneous mechanoreceptors. Curr. Opin. Neurobiol. 2001, 11, 455–461. [Google Scholar] [CrossRef]
- Maule, F.; Barchiesi, G.; Brochier, T.; Cattaneo, L. Haptic working memory for grasping: The role of the parietal operculum. Cereb. Cortex 2015, 25, 528–537. [Google Scholar] [CrossRef] [PubMed]
- Kaas, A.L.; Van Mier, H.; Goebel, R. The neural correlates of human working memory for haptically explored object orientations. Cereb. Cortex 2007, 17, 1637–1649. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gurtubay-Antolin, A.; León-Cabrera, P.; Rodríguez-Fornells, A. Neural Evidence of Hierarchical Cognitive Control during Haptic Processing: An fMRI Study. eNeuro 2019, 5, ENEURO.0295-18.2018. [Google Scholar] [CrossRef]
- Fiehler, K.; Burke, M.; Engel, A.; Bien, S.; Rösler, F. Kinesthetic working memory and action control within the dorsal stream. Cereb. Cortex 2008, 18, 243–253. [Google Scholar] [CrossRef] [Green Version]
- Servos, P.; Lederman, S.; Wilson, D.; Gati, J. fMRI-derived cortical maps for haptic shape, texture, and hardness. Cogn. Brain Res. 2001, 12, 307–313. [Google Scholar] [CrossRef]
- Burton, H.; Sinclair, R.J.; Lin, W.; MacLeod, A.K. PET and fMRI scans of the cerebral cortex in humans and single neuron responses from SI in monkeys to rubbing embossed dot and grating patterns across a fingerpad. In Somesthesis and the Neurobiology of the Somatosensory Cortex; Franzén, O., Johansson, R., Terenius, L., Eds.; Birkhäuser: Basel, Switzerland, 1996; pp. 339–349. ISBN 978-3-0348-9016-8. [Google Scholar]
- Deibert, E.; Kraut, M.; Kremen, S.; Hart, J. Neural pathways in tactile object recognition. Neurology 1999, 52, 1413–1417. [Google Scholar] [CrossRef] [PubMed]
- Norman, J.F.; Adkins, O.C.; Hoyng, S.C.; Dowell, C.J.; Pedersen, L.E.; Gilliam, A.N. Aging and the Haptic Perception of Material Properties. Perception 2016, 45, 1387–1398. [Google Scholar] [CrossRef] [PubMed]
- Cakrt, O.; Slabý, K.; Kmet, J.; Kolár, P.; Jerábek, J. Subjective visual and haptic vertical in young and elderly. J. Vestib. Res. Equilib. Orientat. 2016, 25, 195–199. [Google Scholar] [CrossRef]
- Giudice, N.A.; Bennett, C.R.; Klatzky, R.L.; Loomis, J.M. Spatial Updating of Haptic Arrays Across the Life Span. Exp. Aging Res. 2017, 43, 274–290. [Google Scholar] [CrossRef] [PubMed]
- Konczak, J.; Sciutti, A.; Avanzino, L.; Squeri, V.; Gori, M.; Masia, L.; Abbruzzese, G.; Sandini, G. Parkinson’s disease accelerates age-related decline in haptic perception by altering somatosensory integration. Brain 2012, 135, 3371–3379. [Google Scholar] [CrossRef] [Green Version]
- Andrews, B.; d’Avossa, G.; Sapir, A. Aging changes 3D perception: Evidence for hemispheric rebalancing of lateralized processes. Neuropsychologia 2017, 99, 121–127. [Google Scholar] [CrossRef] [PubMed] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angle Categories | Second | Third | Fourth | Fifth | Sixth | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| 22° | 0.2850 | 0.2850 | 0.7350 | 0 | 0 | 0 | ||||
| 24° | 0.1027 | 0.1027 | 0.2850 | 0.9833 | 0 | 0 | ||||
| 26° | 0.0048 | 0.0123 | 0 | 0 | 0 | 0 | ||||
| 28° | 0 | 0 | 0.0048 | 0.2850 | 0.7350 | 0 | ||||
| 30° | 0 | 0 | 0 | 0.1027 | 0.2850 | 1.0000 | ||||
| 0.3925 | 0.3877 | 0.2898 | 0.3877 | 0.2850 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Yang, J.; Yu, Y.; Yu, Y.; Wang, W.; Li, H.; Takahashi, S.; Ejima, Y.; Wu, Q.; Wu, J. A New Method for Haptic Shape Discriminability Detection. Appl. Sci. 2021, 11, 7049. https://doi.org/10.3390/app11157049
Liu Y, Yang J, Yu Y, Yu Y, Wang W, Li H, Takahashi S, Ejima Y, Wu Q, Wu J. A New Method for Haptic Shape Discriminability Detection. Applied Sciences. 2021; 11(15):7049. https://doi.org/10.3390/app11157049
Chicago/Turabian StyleLiu, Yulong, Jiajia Yang, Yinghua Yu, Yiyang Yu, Wu Wang, Huazhi Li, Satoshi Takahashi, Yoshimichi Ejima, Qiong Wu, and Jinglong Wu. 2021. "A New Method for Haptic Shape Discriminability Detection" Applied Sciences 11, no. 15: 7049. https://doi.org/10.3390/app11157049
APA StyleLiu, Y., Yang, J., Yu, Y., Yu, Y., Wang, W., Li, H., Takahashi, S., Ejima, Y., Wu, Q., & Wu, J. (2021). A New Method for Haptic Shape Discriminability Detection. Applied Sciences, 11(15), 7049. https://doi.org/10.3390/app11157049