
A General Framework for Crankshaft Balancing and Counterweight Design




Abstract
:1. Introduction
2. Methodology
Balancing Concepts
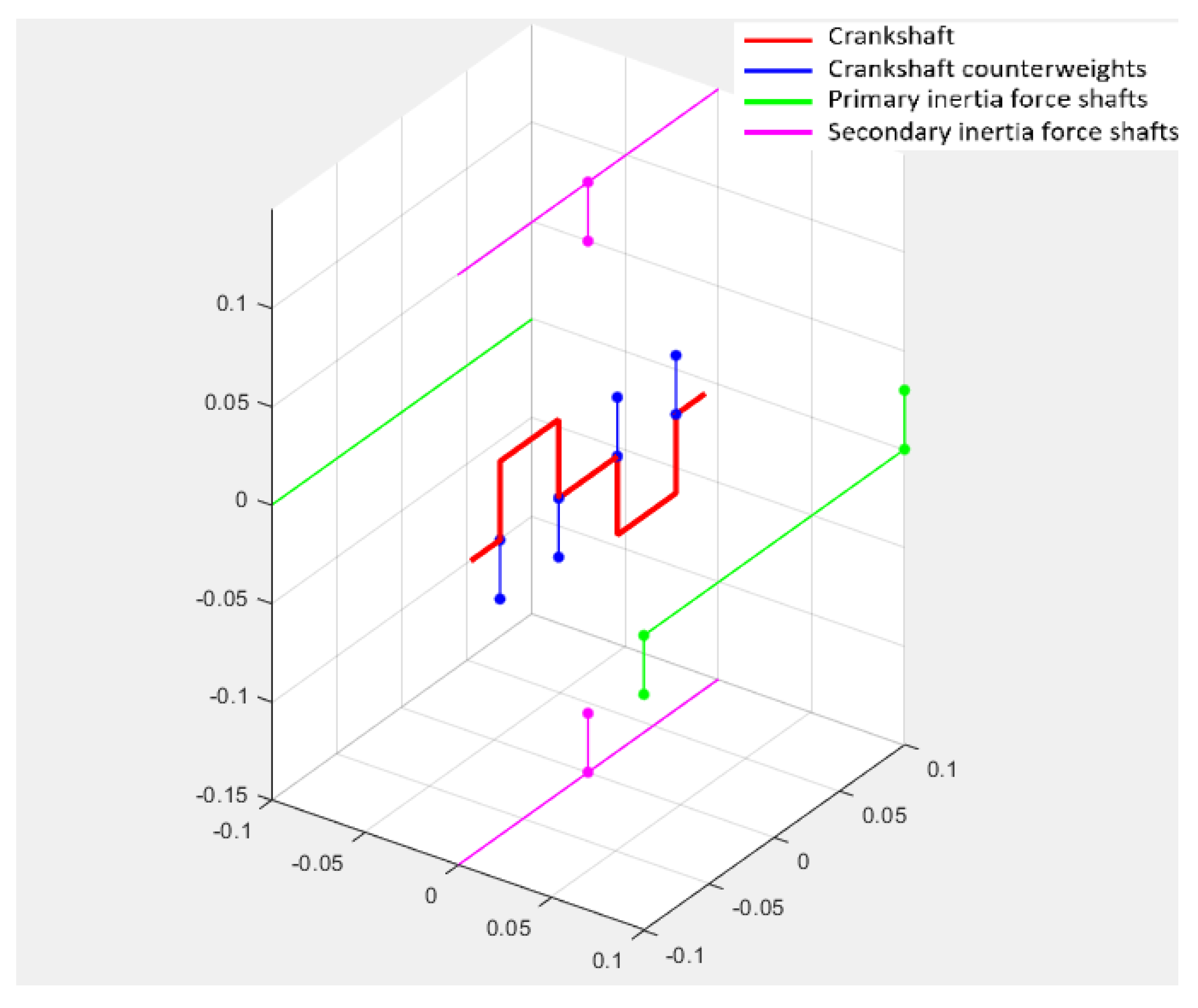
- two main journals, which are supported by the engine block;
- one crank-pin, on which the big-eye of the connecting rod is placed;
- two crank webs, which connect the main journals and the crank-pin.
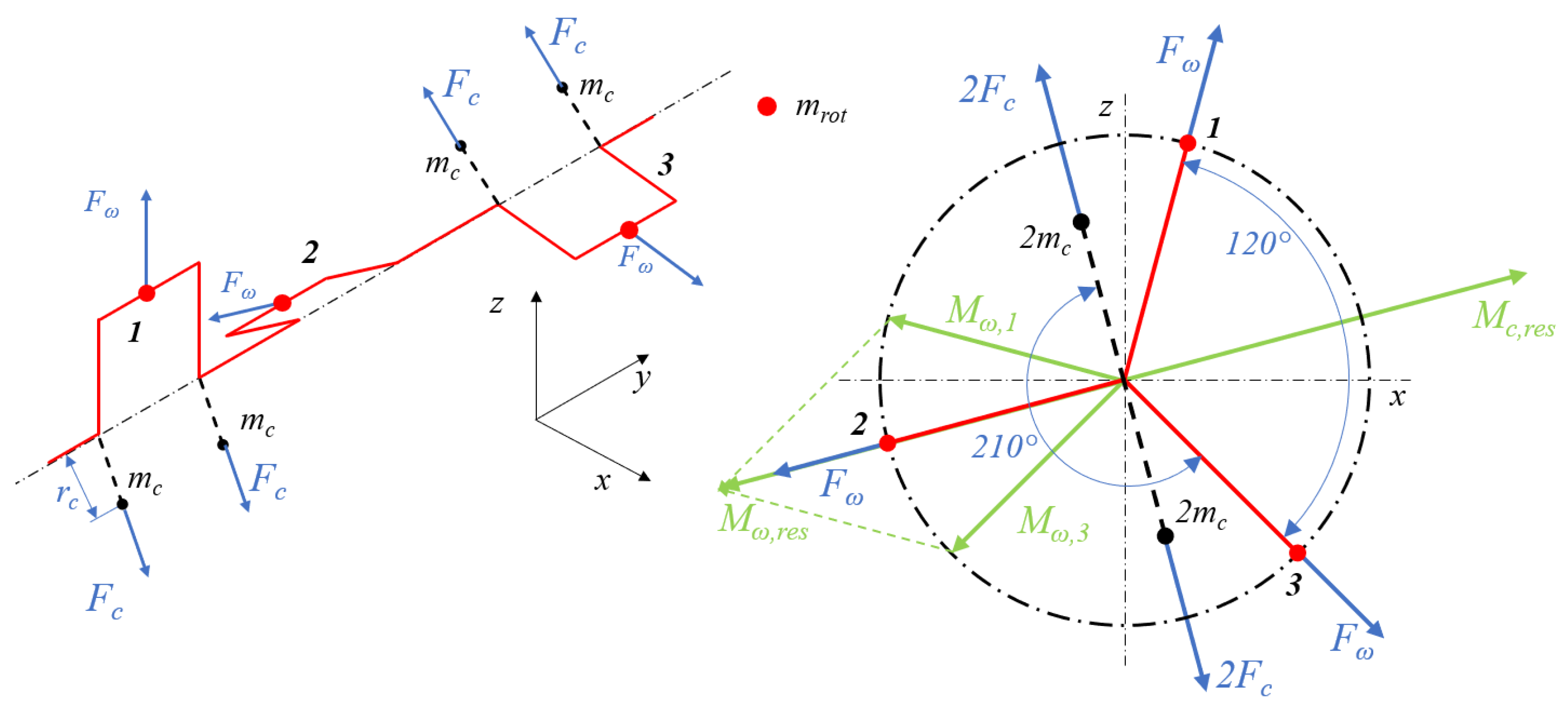
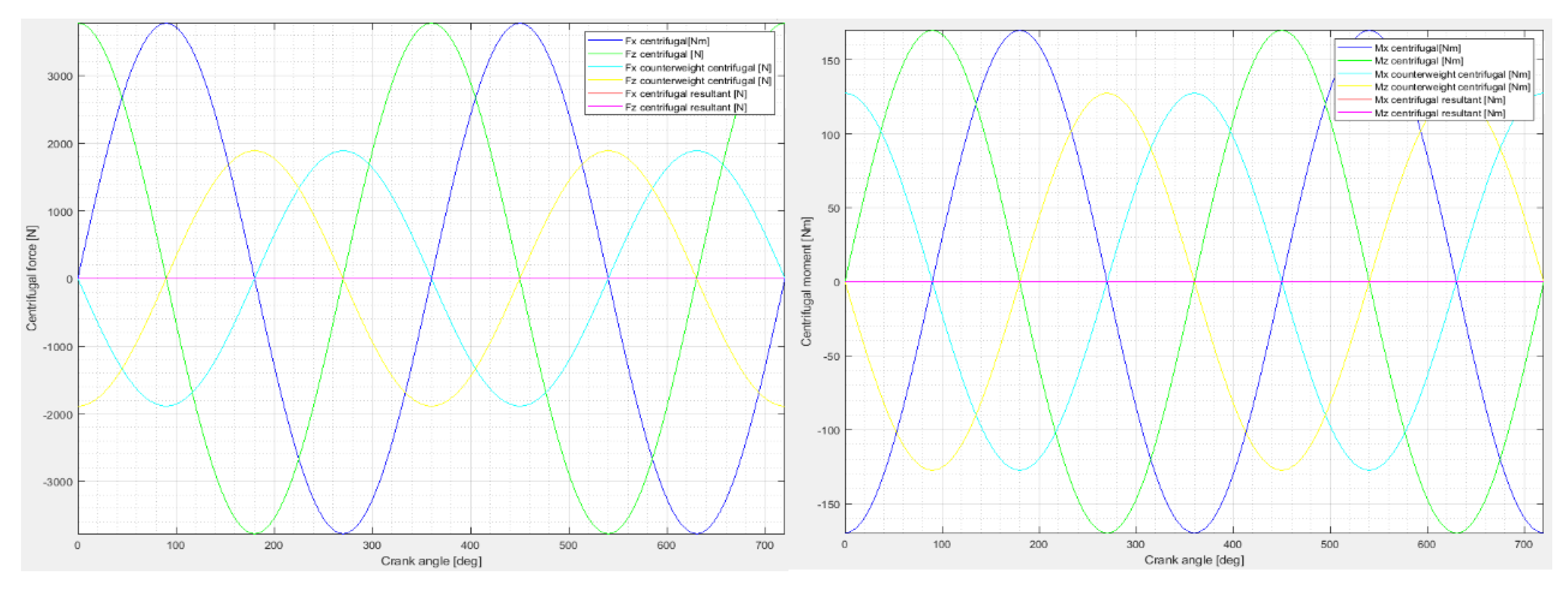
- Centrifugal force, ;
- Primary reciprocating force, ;
- Secondary reciprocating force,
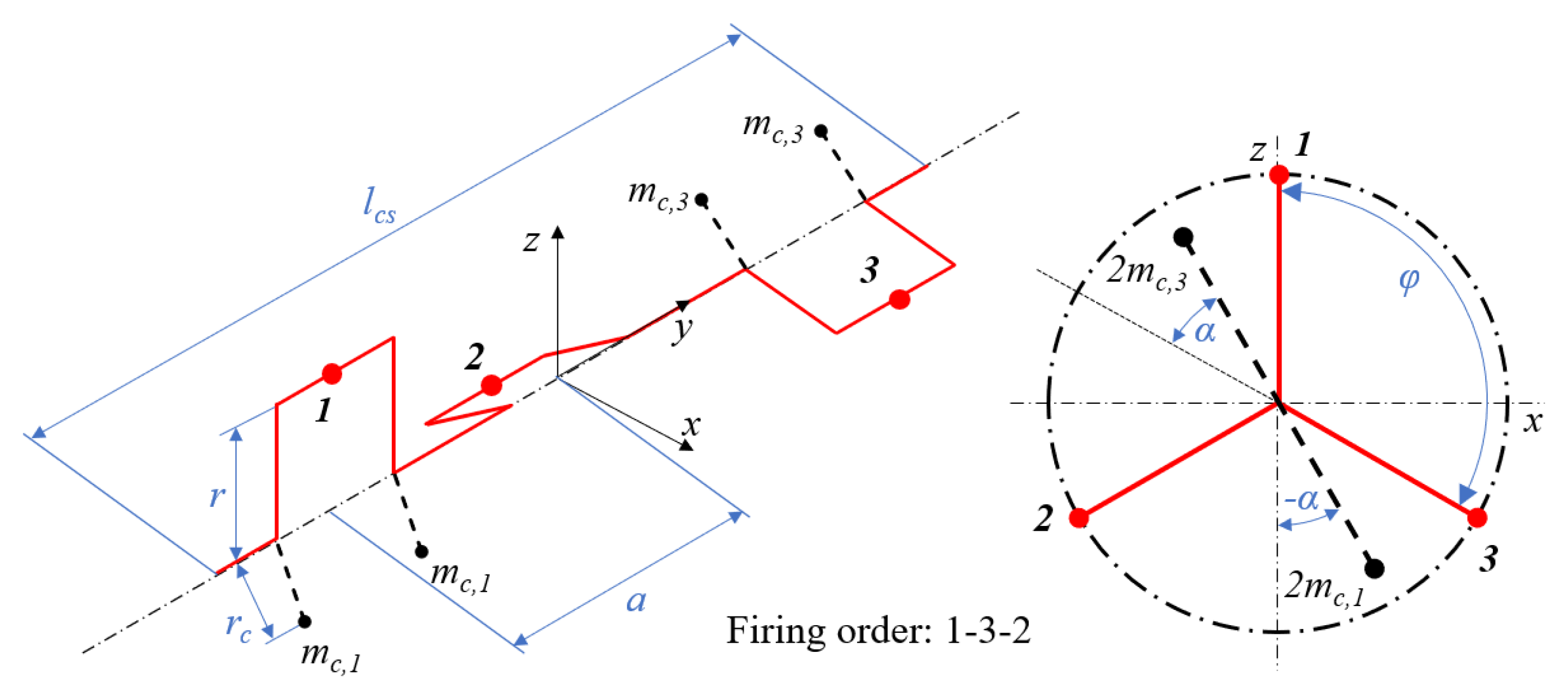
3. Tool Design
- Number of cranks, ;
- Vector of the firing order, ;
- Crank angle of the first crank, ;
- Distance between the mid-points of two consecutive cranks, a;
- Phase between two cranks (based on firing order), ;
- Angle between counterweight and crankpin symmetrical opposite, ;
- Vector for definition of counterweight configuration, .
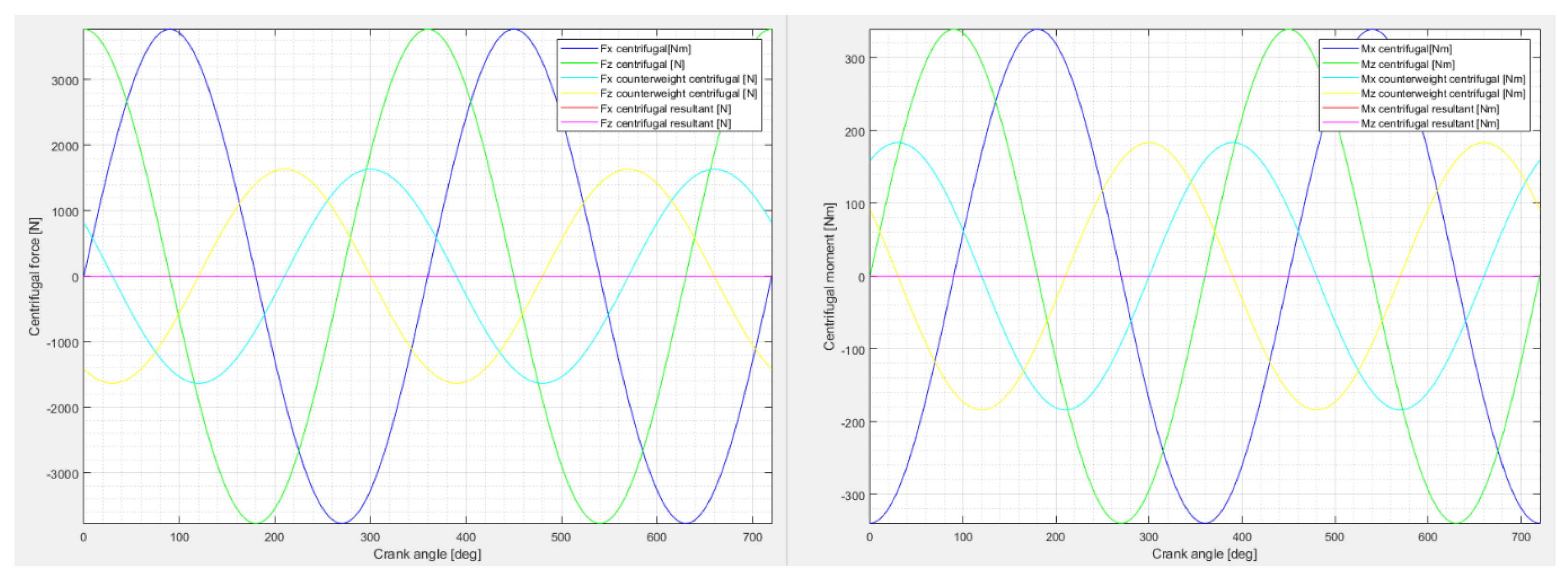
3.1. Centrifugal Forces Balancing
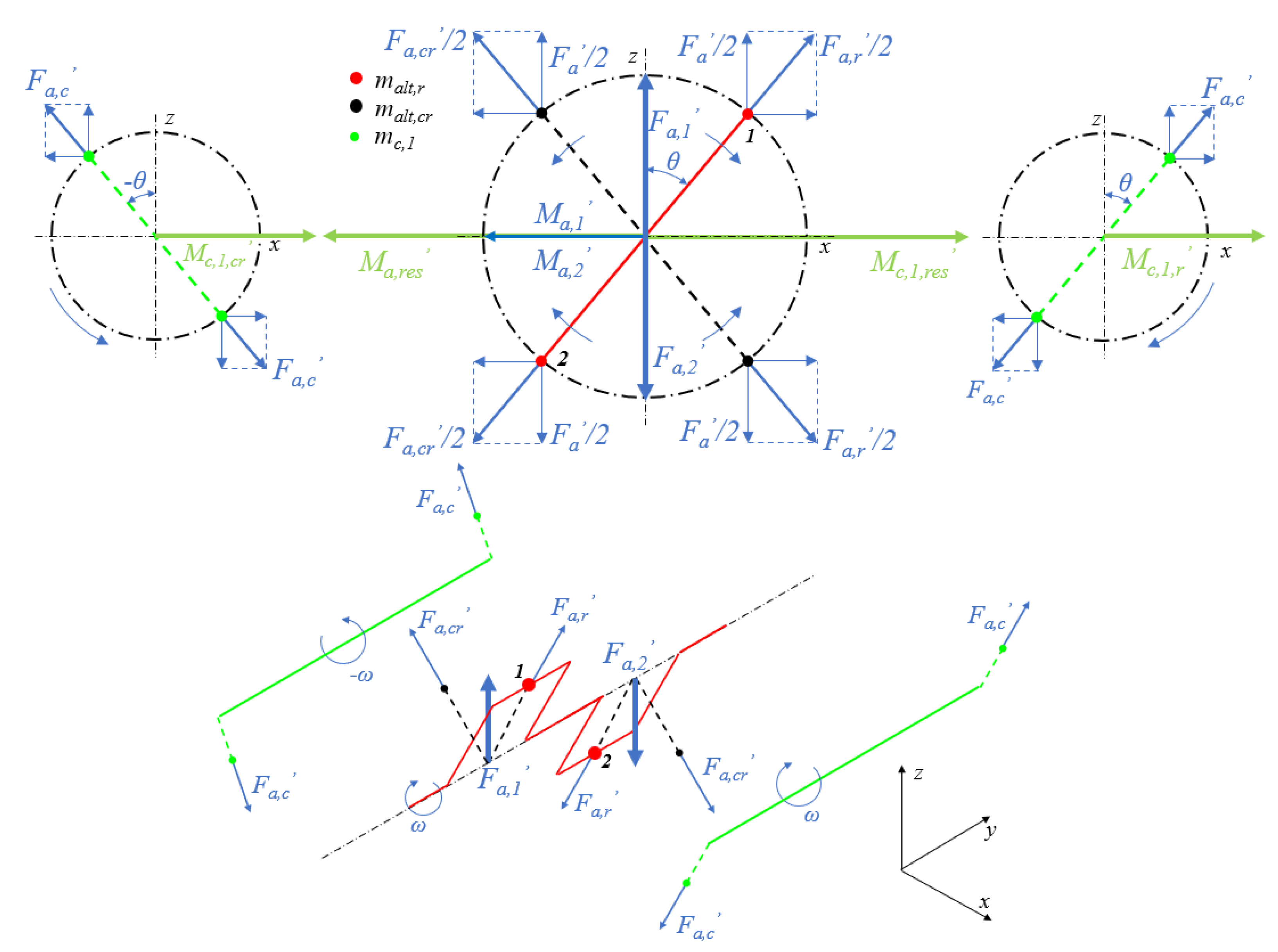
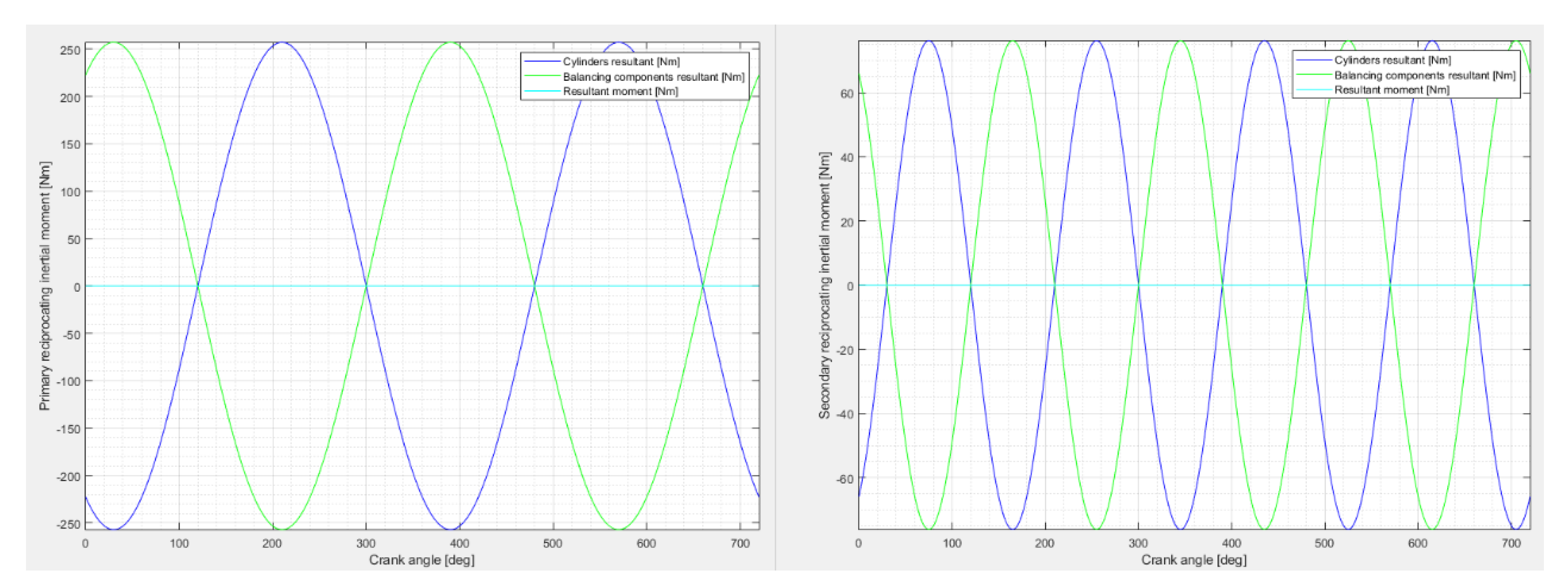
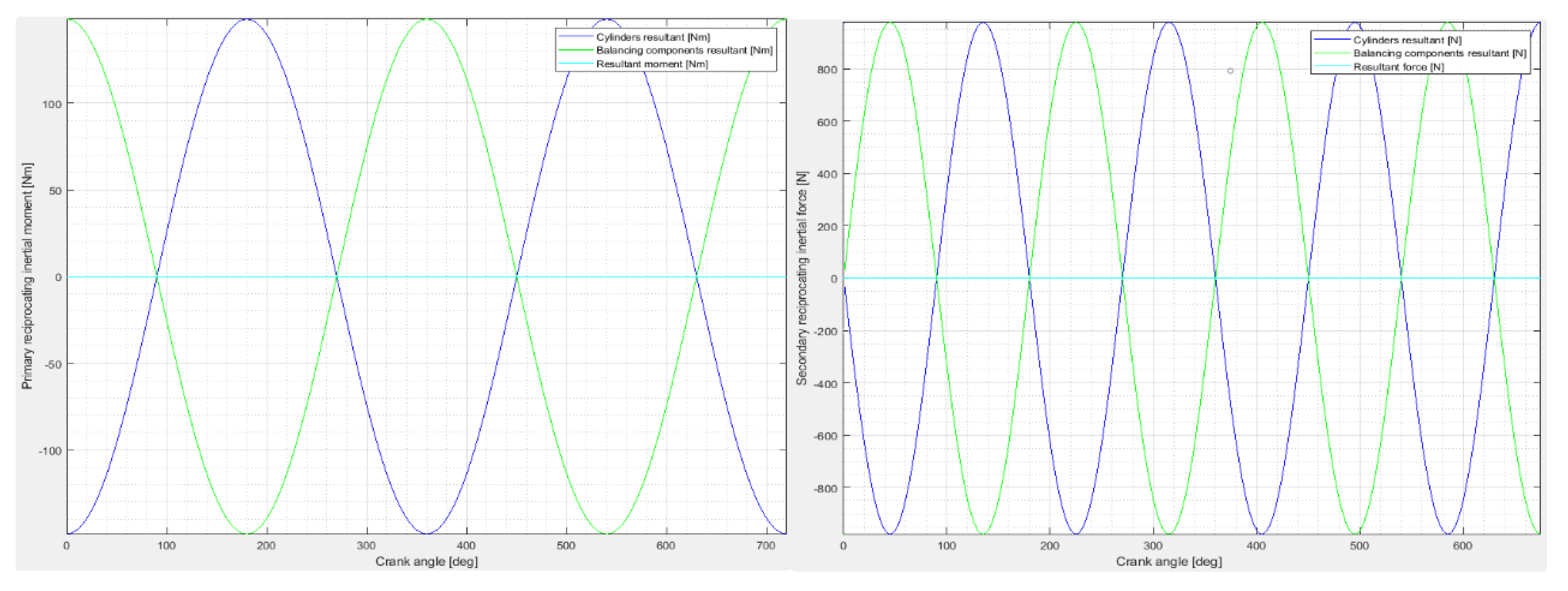
3.2. Primary Reciprocating Forces Balancing
- The total length of the primary balancing shafts (which corresponds to the distance between the outer counterweights of the shafts), ;
- The radius of the centre of gravity of the primary counterweights, .
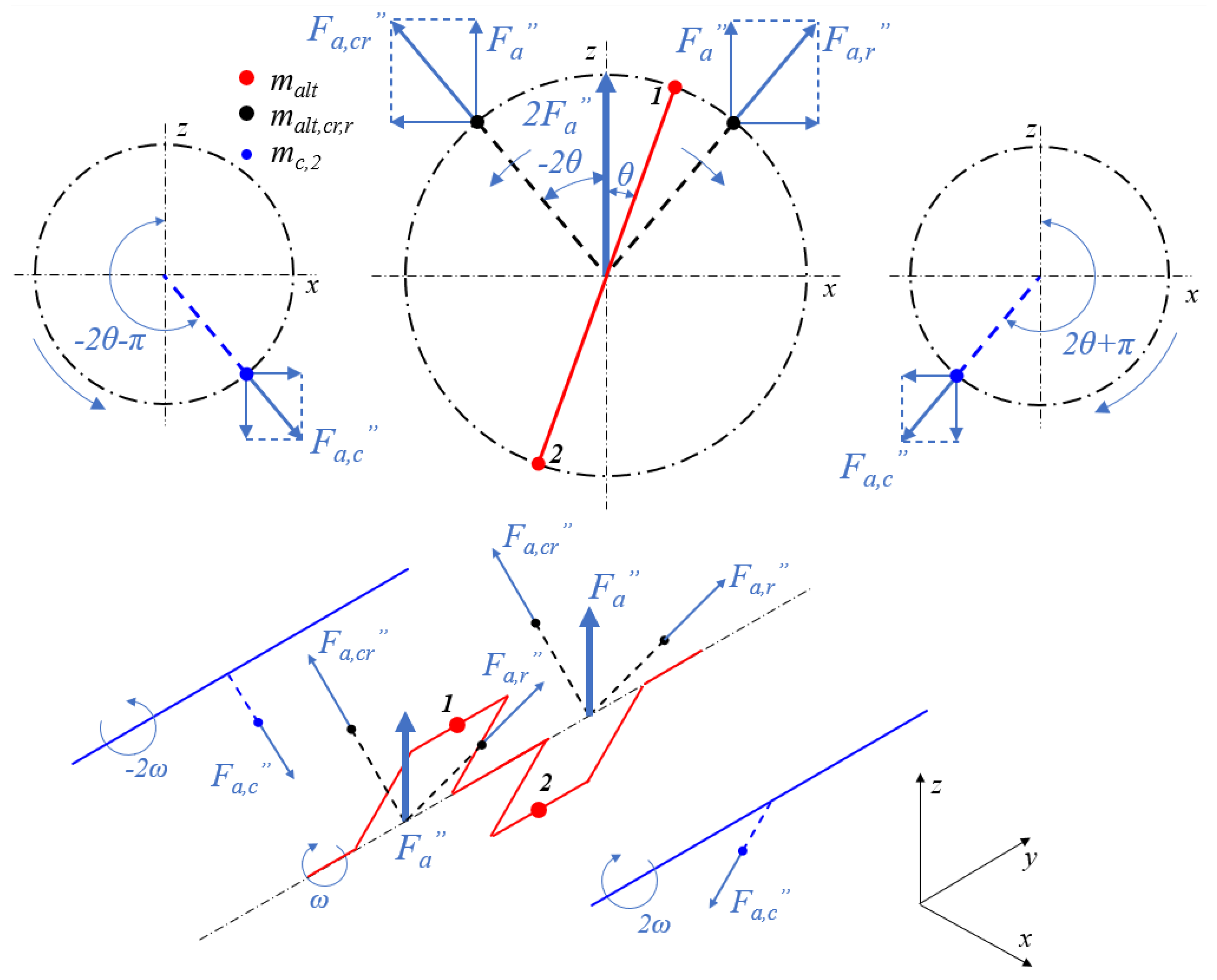
3.3. Secondary Reciprocating Forces Balancing
- The total length of the secondary balancing shafts (which corresponds to the distance between the outer counterweights of the shafts), ;
- The radius of the centre of gravity of the secondary counterweights, .
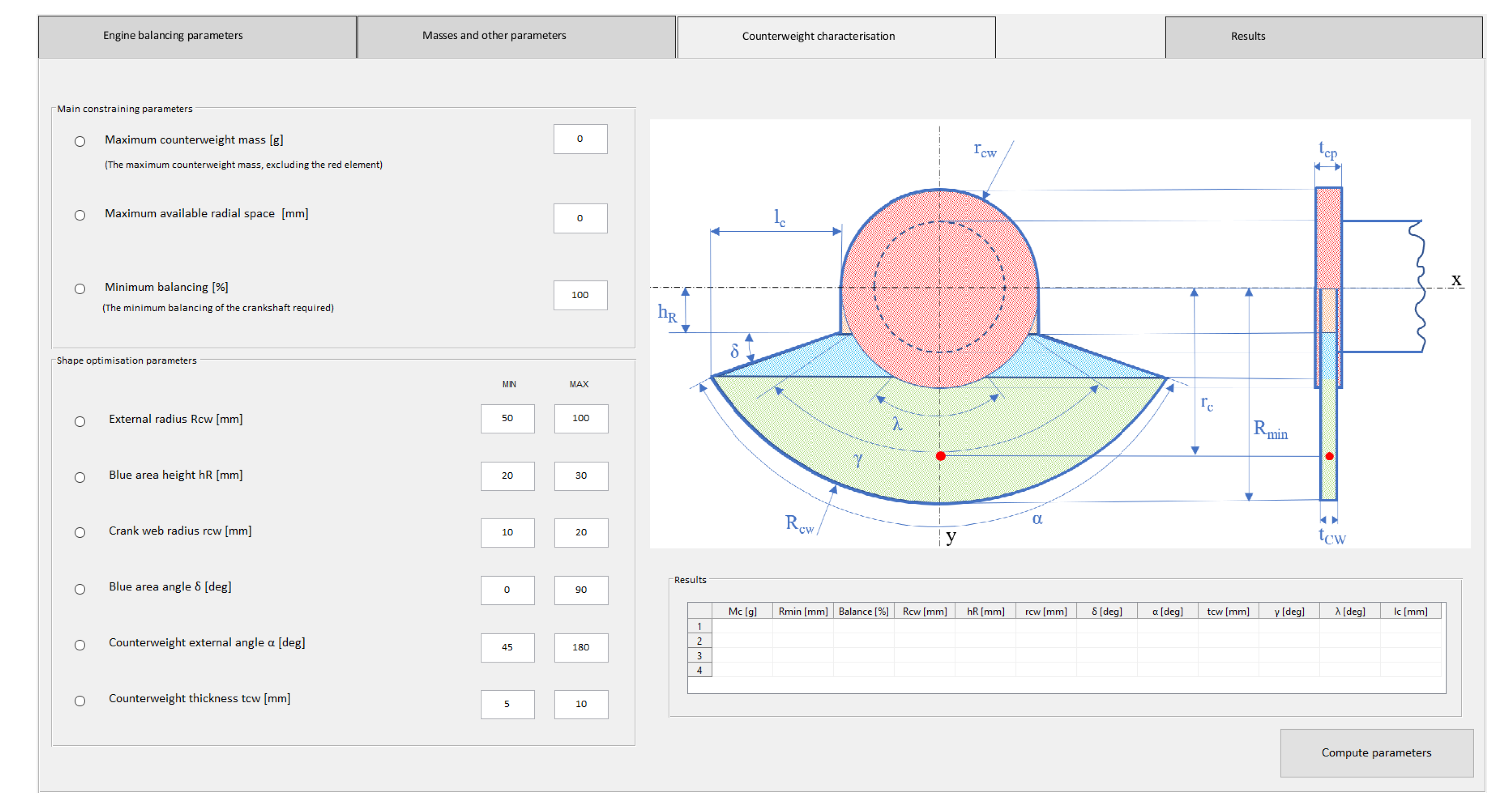
4. Counterweight Characterisation
- In red, the circle representing the base crank web (no counterweights), defined by ;
- A rectangle in orange, defined by and ;
- A trapezoid in blue, defined by , and ;
- A circular segment in green, defined by , and .
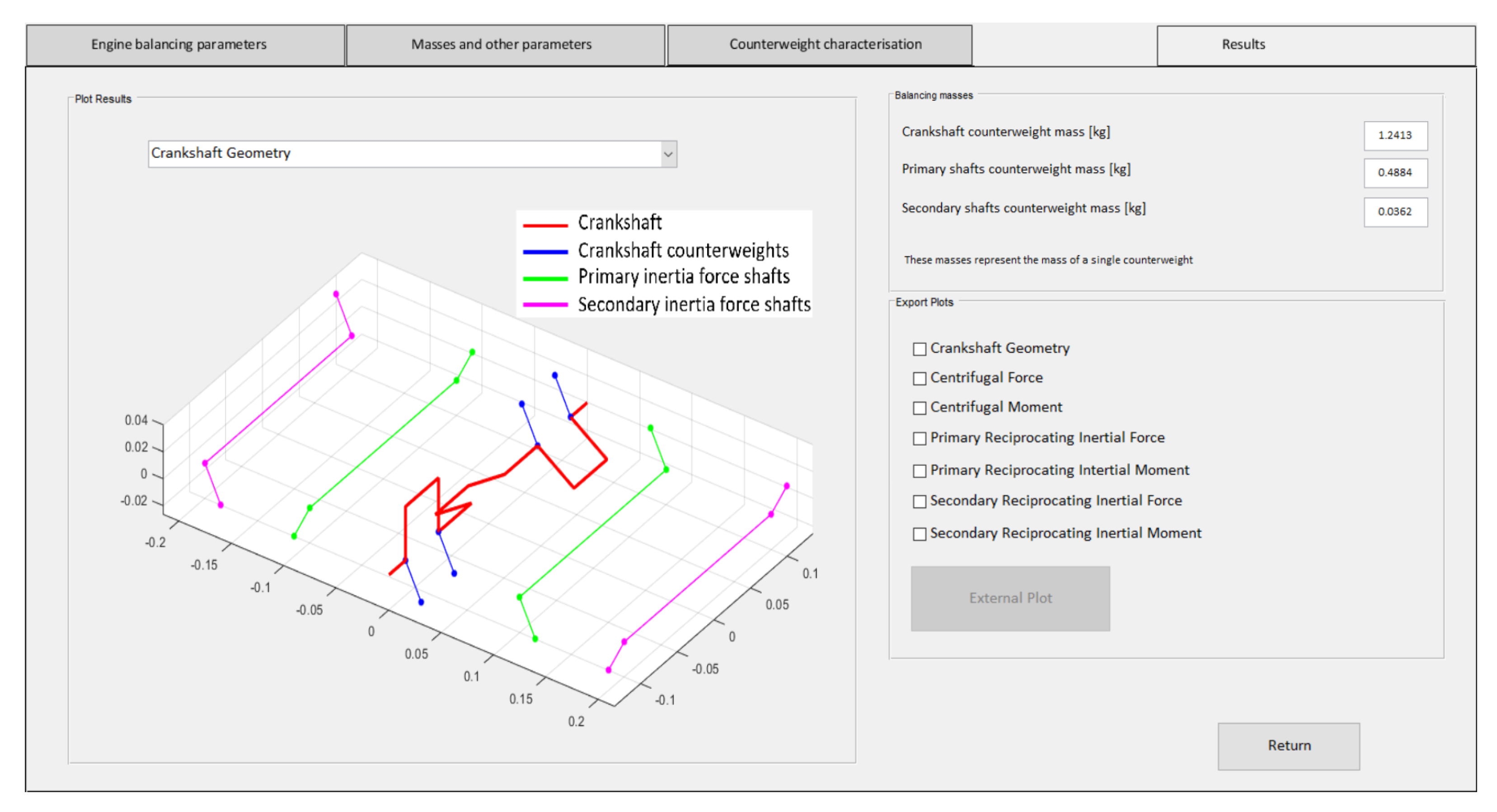
5. User-Interface
- The maximum mass of the component;
- The maximum available space for the path of the counterweight permitted by all the other components of the engine;
- The minimum balance requested by the engine.
6. Practical Examples
6.1. 3 Cylinder in-Line Engine
6.2. 4 Cylinder V-Engine
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAD | Computer-aided design |
| GUI | Graphical user interface |
| Crank angle | |
| Crankshaft rotational speed | |
| Elongation ratio | |
| r | Crank radius |
| Crank centrifugal force | |
| Crank primary reciprocating force (numerical subscripts indicate the crank number) | |
| Crank secondary reciprocating force (numerical subscripts indicate the crank number) | |
| Crank rotational mass | |
| Crank alternative mass | |
| Piston and piston rings mass | |
| Crankpin mass | |
| Wrist pin mass | |
| Connecting rod mass | |
| Connecting rod length | |
| Crankshaft offset | |
| Wrist pin offset | |
| Crank web mass | |
| Crank web centre of gravity radius | |
| Crankshaft counterweight mass | |
| Crankshaft counterweight radius | |
| Crankshaft counterweight centrifugal force | |
| Crank centrifugal moment (numerical subscripts indicate the crank number) | |
| Crank centrifugal resultant moment | |
| Crankshaft counterweight resultant centrifugal moment | |
| Counter-rotating fictitious masses | |
| Rotating fictitious masses | |
| Counterweights mass for the primary reciprocating force | |
| Balancing shaft counterweight radius (Primary reciprocating force) | |
| Balancing shaft total length (Primary reciprocating force) | |
| Centrifugal force of rotating fictitious masses (Primary reciprocating force) | |
| Moments generated by the primary reciprocating forces (numerical subscripts indicate the crank number) | |
| Centrifugal force of counter-rotating fictitious masses (Primary reciprocating force) | |
| Centrifugal force generated by the primary reciprocating force counterweights | |
| Moment generated by the rotating shafts (Primary reciprocating force) | |
| Moment generated by the counter-rotating shafts (Primary reciprocating force) | |
| Crankshaft counterweight resultant moment (Primary reciprocating force) | |
| Balancing shafts counterweight resultant moment (Primary reciprocating force) | |
| Rotating and counter-rotating fictitious masses | |
| Counterweights mass for the secondary reciprocating force | |
| Balancing shaft counterweight radius (Secondary reciprocating force) | |
| Balancing shaft total length (Primary reciprocating force) | |
| Balancing shaft total length (Secondary reciprocating force) | |
| Centrifugal force of rotating fictitious masses (Secondary reciprocating force) | |
| Centrifugal force of counter-rotating fictitious masses (Secondary reciprocating force) | |
| Centrifugal force generated by the secondary reciprocating force counterweights | |
| Crankshaft resultant force (Secondary reciprocating force) | |
| Crankshaft resultant moment (Secondary reciprocating force) | |
| Number of cranks | |
| Number of crankshaft counterweights | |
| Number of balancing shaft (Primary reciprocating force) | |
| Number of balancing shaft (Secondary reciprocating force) | |
| Number of balancing shaft counterweights (Primary reciprocating force) | |
| Number of balancing shaft counterweights (Secondary reciprocating force) | |
| Counterweight mass to be added for the rotating primary reciprocating force balance | |
| Rotating balancing shaft distance from crankshaft (Primary reciprocating force) | |
| Rotating balancing shaft distance from crankshaft (Secondary reciprocating force) | |
| Counter-rotating balancing shaft distance from crankshaft (Primary reciprocating force) | |
| Counter-rotating balancing shaft distance from crankshaft (Secondary reciprocating force) | |
| Vector of the firing order | |
| a | Distance between the mid-points of two consecutive cranks |
| Phase between two cranks (based on firing order) | |
| Angle between counterweight and crankpin symmetrical opposite | |
| Vector for definition of counterweight configuration | |
| Crankshaft geometry matrix | |
| Crankshaft counterweights geometry matrix | |
| Rotating balancing shaft counterweights geometry matrix (Primary reciprocating force) | |
| Counter-rotating balancing shaft counterweights geometry matrix (Primary reciprocating force) | |
| Rotating balancing shaft counterweights geometry matrix (Secondary reciprocating force) | |
| Counter-rotating balancing shaft counterweights geometry matrix (Secondary reciprocating force) | |
| , | Characteristic radii of the counterweight |
| , , | Construction parameters for the counterweight |
| , , | Characteristic angles of the counterweight |
| Thickness of the counterweight | |
| Areas of the counterweight (where is “green”, “blue”, “orange” or “cw”) |
References
- Kirwan, J.E.; Shost, M.; Roth, G.; Zizelman, J. 3-Cylinder Turbocharged Gasoline Direct Injection: A High Value Solution for Low CO2 and NOx Emissions. SAE Int. J. Engines 2010, 3, 355–371. [Google Scholar] [CrossRef]
- Delprete, C.; Razavykia, A. Piston ring–liner lubrication and tribological performance evaluation: A review. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2017, 232, 193–209. [Google Scholar] [CrossRef]
- Manzie, C. Relative Fuel Economy Potential of Intelligent, Hybrid and Intelligent–Hybrid Passenger Vehicles. In Electric and Hybrid Vehicles; Elsevier: Hoboken, NJ, USA, 2010; pp. 61–90. [Google Scholar] [CrossRef]
- Ecker, H.J.; Schwaderlapp, M.; Gill, D.K. Downsizing of Diesel Engines: 3-Cylinder/4-Cylinder. In SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2000. [Google Scholar] [CrossRef]
- Victor, W. Machinery Vibration: Balancing; McGraw-Hill Professional: New York, NY, USA, 1998. [Google Scholar]
- Albers, A.; Leon-Rovira, N.; Aguayo, H.; Maier, T. Development of an engine crankshaft in a framework of computer-aided innovation. Comput. Ind. 2009, 60, 604–612. [Google Scholar] [CrossRef]
- Quinsat, Y.; Lartigue, C. Filling holes in digitized point cloud using a morphing-based approach to preserve volume characteristics. Int. J. Adv. Manuf. Technol. 2015, 81, 411–421. [Google Scholar] [CrossRef]
- Guarato, A.Z.; Quinsat, Y.; Mehdi-Souzani, C.; Lartigue, C.; Sura, E. Conversion of 3D scanned point cloud into a voxel-based representation for crankshaft mass balancing. Int. J. Adv. Manuf. Technol. 2017, 95, 1315–1324. [Google Scholar] [CrossRef] [Green Version]
- Kang, Y.; Tseng, M.H.; Wang, S.M.; Chiang, C.P.; Wang, C.C. An accuracy improvement for balancing crankshafts. Mech. Mach. Theory 2003, 38, 1449–1467. [Google Scholar] [CrossRef]
- Schnurbein, E.V. A New Method of Calculating Plain Bearings of Statically Indeterminate Crankshafts. In SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 1970. [Google Scholar] [CrossRef]
- Razavykia, A.; Delprete, C.; Baldissera, P. Numerical Study of Power Loss and Lubrication of Connecting Rod Big-End. Lubricants 2019, 7, 47. [Google Scholar] [CrossRef] [Green Version]
- Parikyan, T.; Resch, T. Statically Indeterminate Main Bearing Load Calculation in Frequency Domain for Usage in Early Concept Phase. In ASME 2012 Internal Combustion Engine Division Fall Technical Conference; American Society of Mechanical Engineers: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Stanley, R.; Taraza, D. A Characteristic Parameter to Estimate the Optimum Counterweight Mass of a 4-Cylinder In-Line Engine. In SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2002. [Google Scholar] [CrossRef]
- Rosso, C.; Delprete, C.; Bonisoli, E.; Tornincasa, S. Integrated CAD/CAE Functional Design for Engine Components and Assembly. In SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2011. [Google Scholar] [CrossRef]
- Albers, A.; Leon, N.; Aguayo, H.; Maier, T. Comparison of Strategies for the Optimization/Innovation of Crankshaft Balance. In IFIP The International Federation for Information Processing; Springer: New York, NY, USA, 2007; pp. 201–210. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine Type | Firing Order | [deg] | a [mm] | [mm] | [mm] | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| In-line | 3 | 1,3,2 | 120 | 90 | 4 | 2 | 2 | 2 | 2 | 30 | 30 |
| [mm] | [mm] | [rpm] | [mm] | [mm] | [mm] | [mm] | [mm] | [g] | [g] | ||
| 100 | 200 | −100 | −200 | 2000 | 80 | 40 | 135 | 0 | 500 | 240 | |
| [g] | [mm] | [g] | [g] | [mm] | |||||||
| 600 | 30 | 200 | 200 | 400 | 1800 | 15 |
| [kg] | [kg] | [kg] |
|---|---|---|
| 1.2413 | 0.4884 | 0.0362 |
| Optimisation | CW Mass [g] | [mm] | Balance [%] | [mm] | [mm] | [mm] | [rad] | [rad] | [mm] | [rad] | [rad] | [mm] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Minimisation | 117.46 | 161.67 | 99.90 | 50.04 | 29.97 | 10.01 | 1.46 | 0.79 | 5.00 | 0.00 | 0.00 | 9.28 |
| Minimisation | 196.80 | 70.00 | 99.99 | 50.00 | 20.00 | 20.00 | 0.00 | 3.13 | 6.05 | 0.00 | 0.00 | 30.00 |
| Engine Type | Firing Order | [deg] | a [mm] | [mm] | [mm] | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| V | 4 | 1,4,3,2 | 180 | 90 | 4 | 2 | 1 | 2 | 2 | 30 | 30 |
| [mm] | [mm] | [rpm] | [mm] | [mm] | [mm] | [mm] | [mm] | [g] | [g] | ||
| 100 | 200 | −100 | −200 | 2000 | 80 | 40 | 135 | 0 | 500 | 240 | |
| [g] | [mm] | [g] | [g] | [mm] | [deg] | ||||||
| 600 | 30 | 200 | 200 | 400 | 1800 | 15 | 90 |
| [kg] | [kg] | [kg] |
|---|---|---|
| 1.700 | 0.3948 | 0.1299 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dagna, A.; Delprete, C.; Gastaldi, C. A General Framework for Crankshaft Balancing and Counterweight Design. Appl. Sci. 2021, 11, 8997. https://doi.org/10.3390/app11198997
Dagna A, Delprete C, Gastaldi C. A General Framework for Crankshaft Balancing and Counterweight Design. Applied Sciences. 2021; 11(19):8997. https://doi.org/10.3390/app11198997
Chicago/Turabian StyleDagna, Alberto, Cristiana Delprete, and Chiara Gastaldi. 2021. "A General Framework for Crankshaft Balancing and Counterweight Design" Applied Sciences 11, no. 19: 8997. https://doi.org/10.3390/app11198997
APA StyleDagna, A., Delprete, C., & Gastaldi, C. (2021). A General Framework for Crankshaft Balancing and Counterweight Design. Applied Sciences, 11(19), 8997. https://doi.org/10.3390/app11198997