
Manipulation Planning for Large Objects through Pivoting, Tumbling, and Regrasping




Abstract
:1. Introduction
- A manipulation plan for pivoting a general-shaped object is proposed;
- Multiple motions, including tumbling, pivoting, and regrasping, are combined to better manipulate the object;
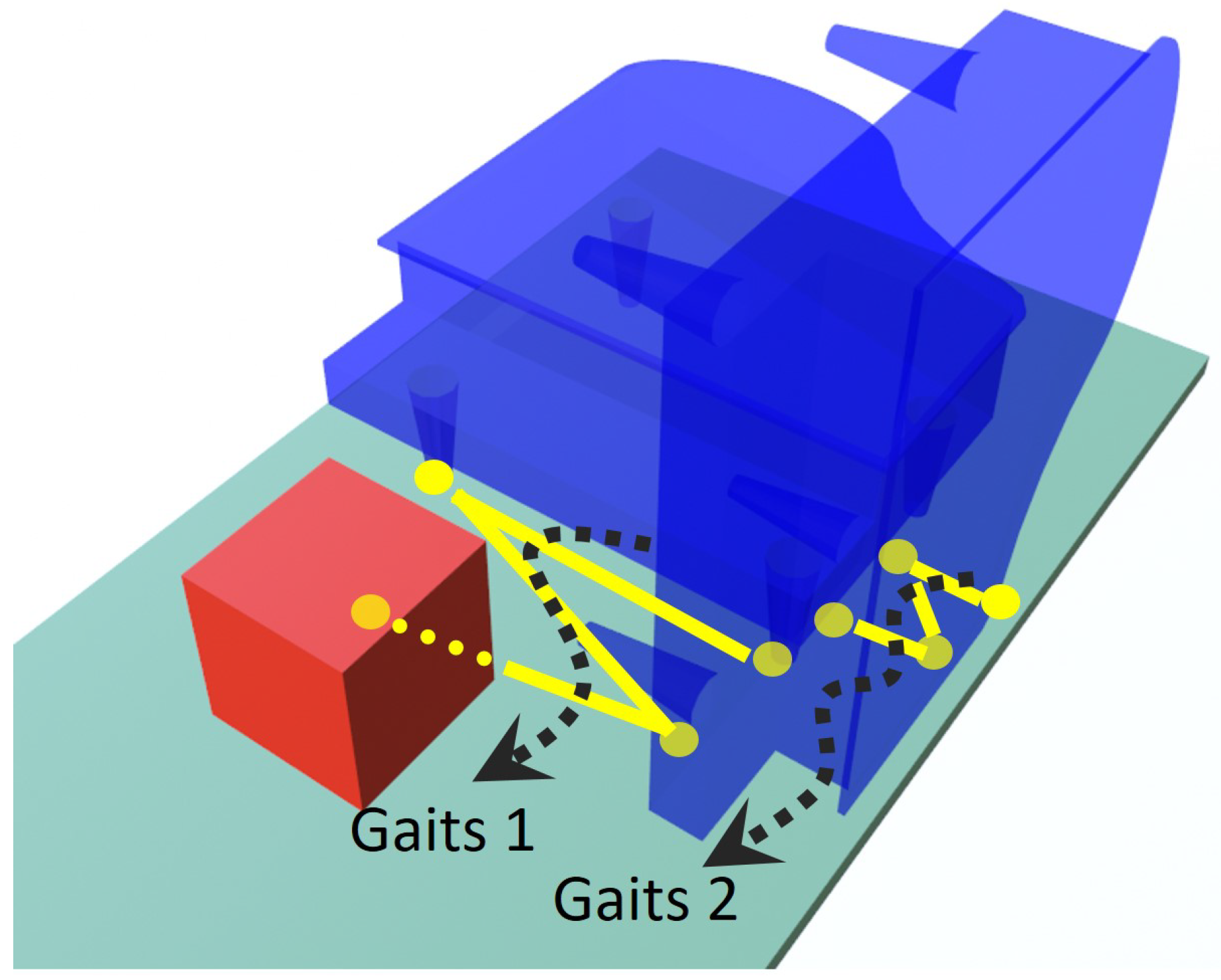
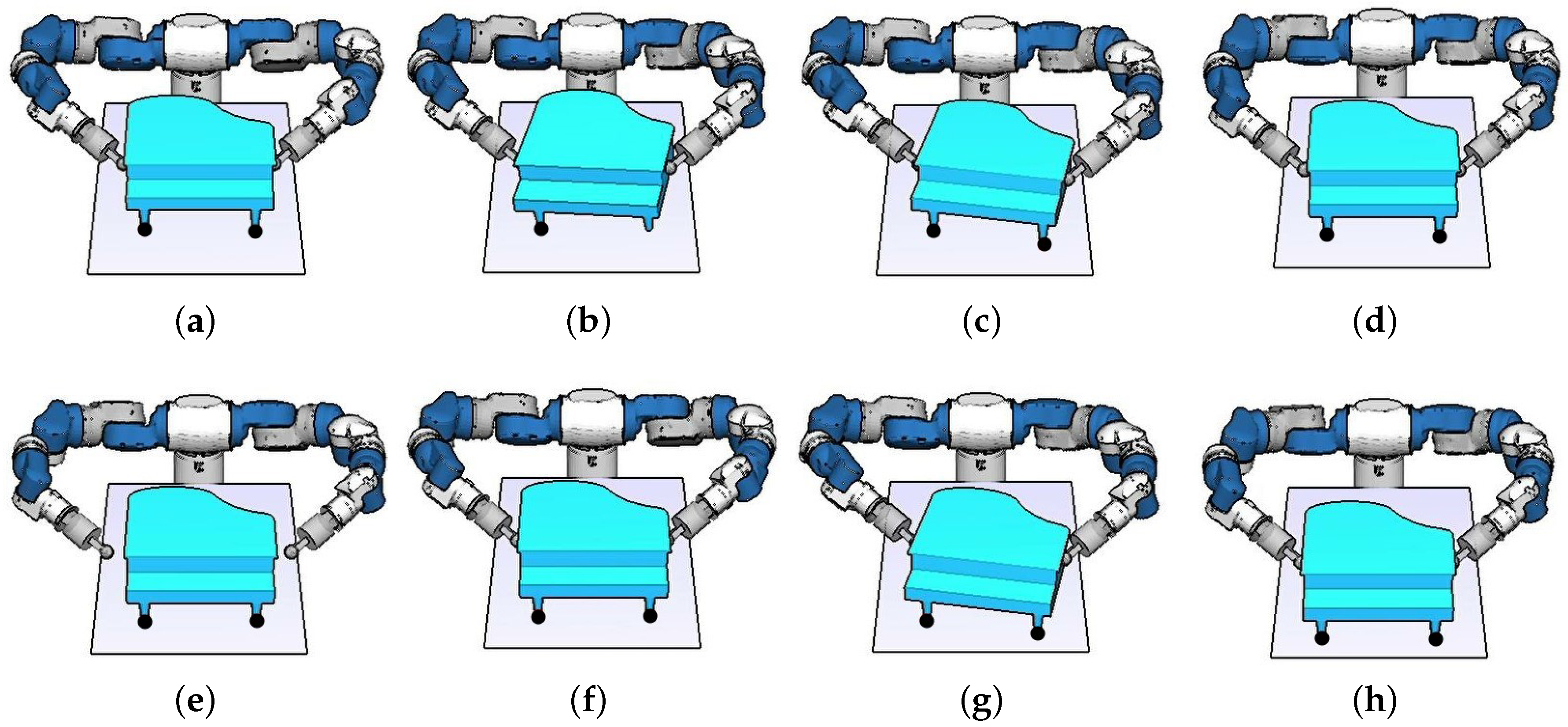
- Pivoting gait is planned in both SP and USP.
2. Related Works
2.1. Non-Prehensile Manipulation
2.2. Regrasp Planning
2.3. Grasp Planning
3. Steps of the Proposed Motion Planner
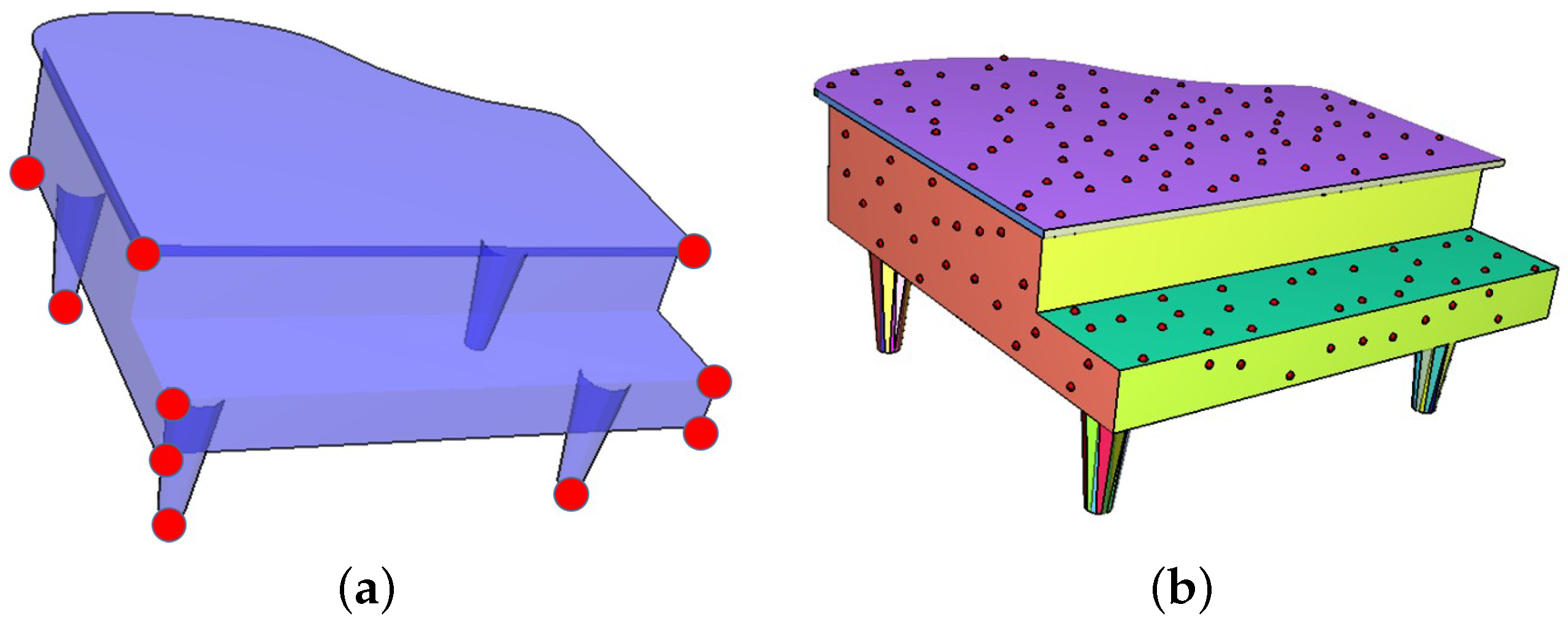
- Before executing the motion planner, the 3D model of the target object is analyzed to obtain the information necessary for the manipulation planner.This information includes the potential rotational vertices used for pivoting, edges used for tumbling, base surfaces for stably contacting the table, and the contact points between the object and EEFs;
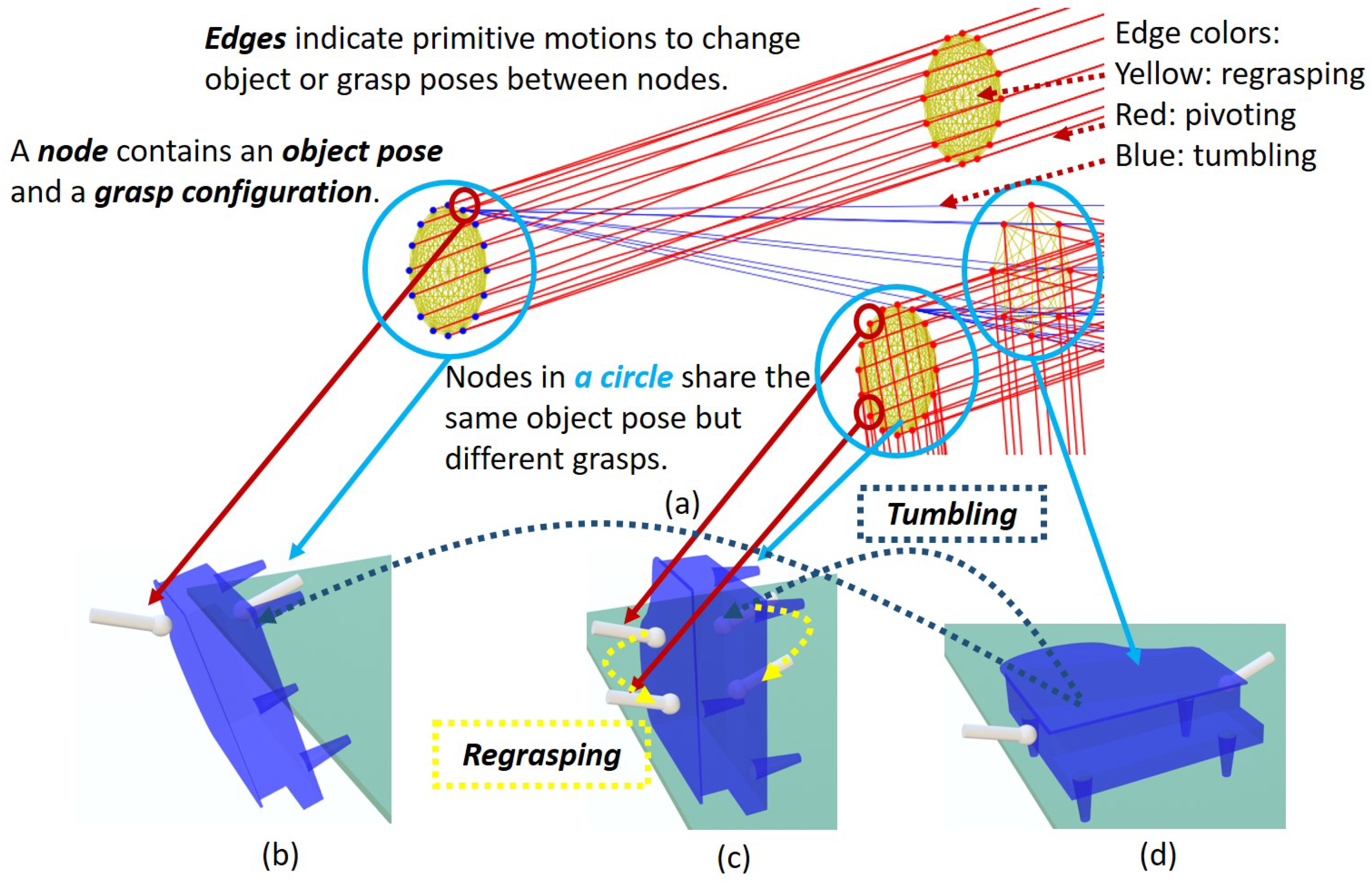
- Task level planning then is performed. We discretize the object poses on a table. The object configurations along with their grasp configurations are saved in the graph nodes. In this phase, we consider object poses in both SP and USP;
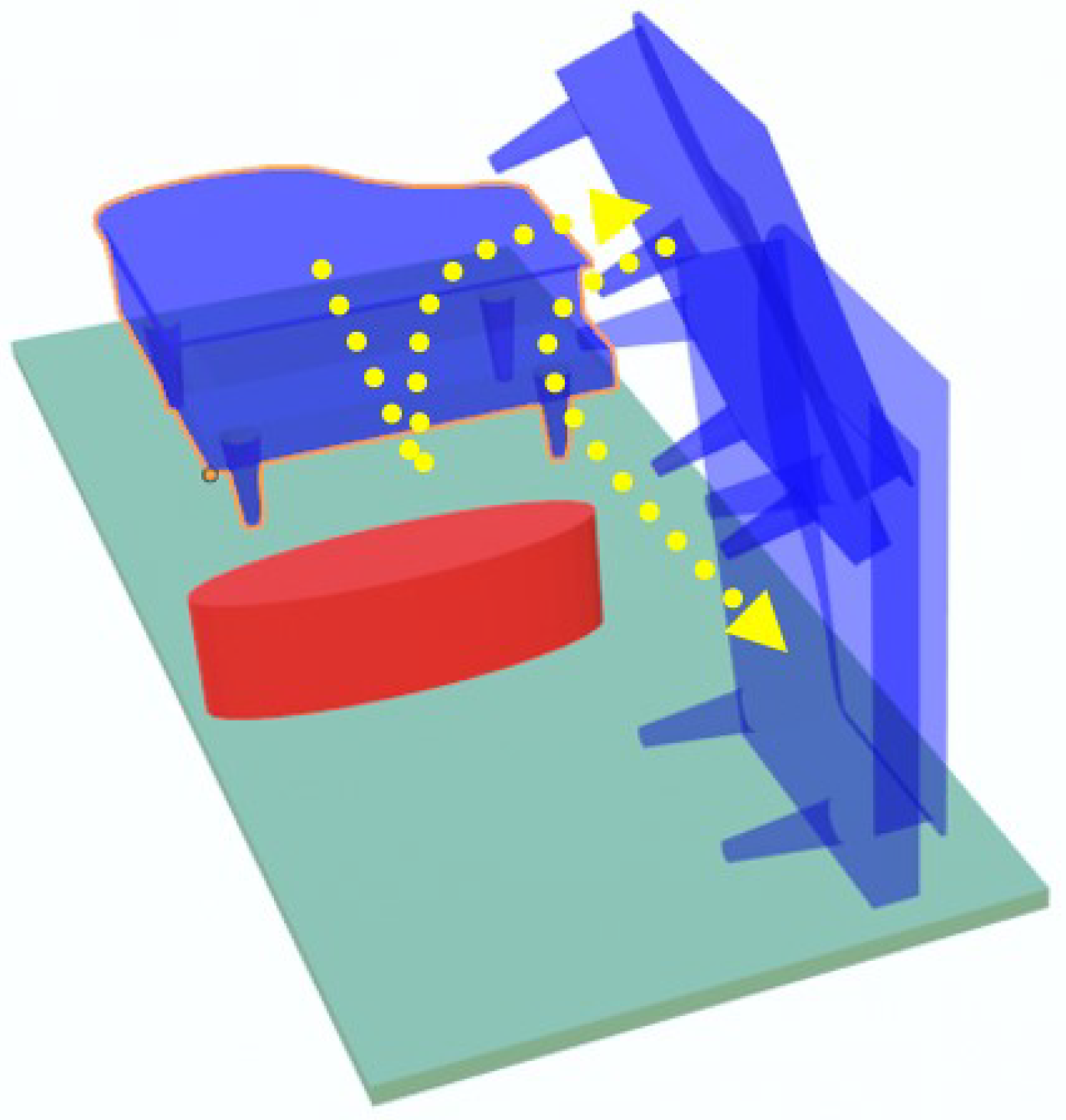
- Finally, in motion level planning, primitive motions, such as pivoting, tumbling, and regrasping, are planned for moving the object to the target location.In the motion level, the designed motions include pivoting, tumbling, and regrasping. MPC is implemented to generate the motions because it can find the motions required for maintaining contact between the object and environment. If we cannot find any feasible motion in this level, we go back to the task level planning.
4. Object Model Analysis
- A set of object vertices, which are the potential rotational vertices during pivoting;
- A set of object edges, which are the potential rotational edges during tumbling;
- A set of stable object placements;
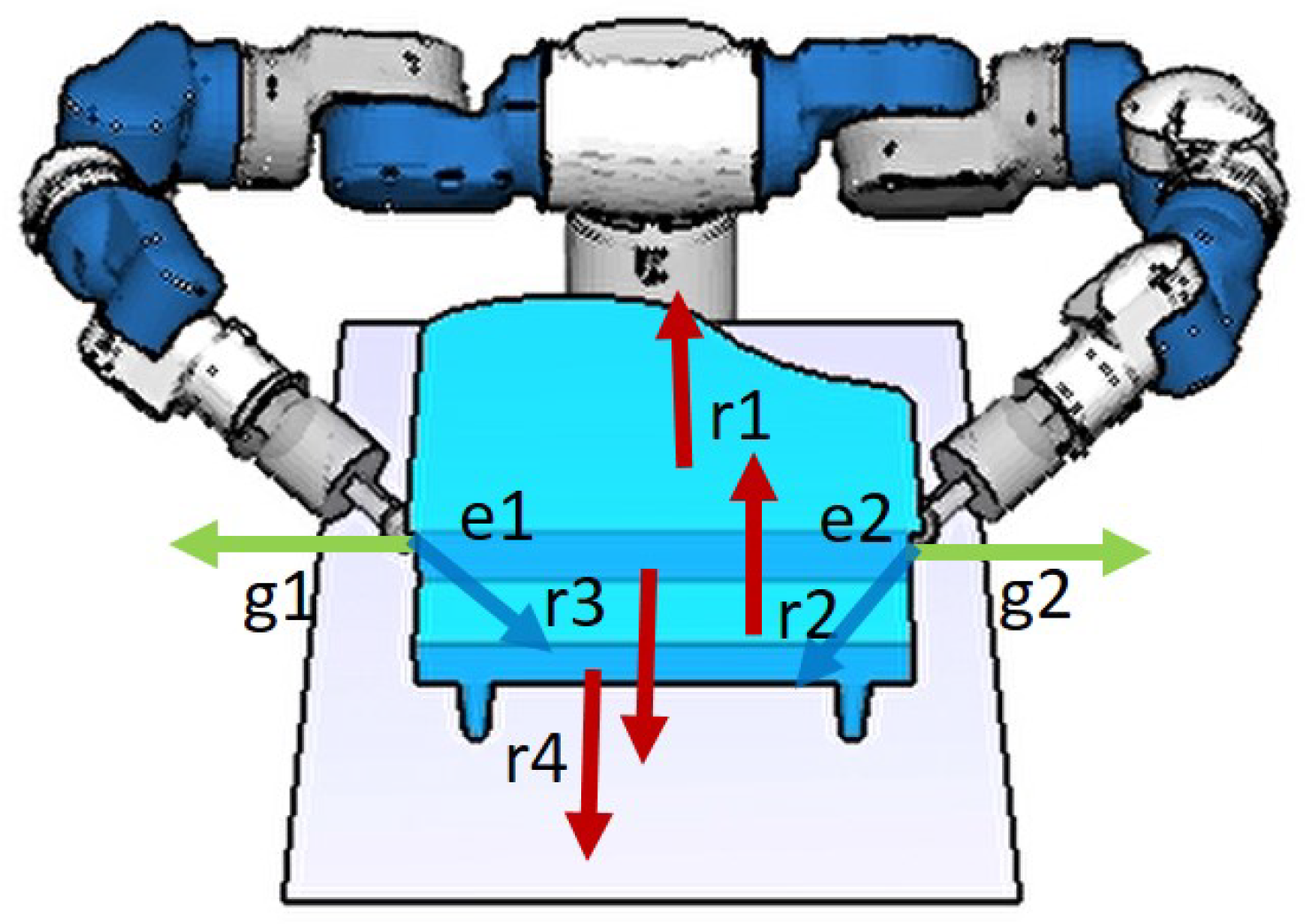
- A set of grasp configurations for the dual-arm manipulator.
4.1. 3D Surface Model Processing for Grasp Planning
4.2. Grasp Planning
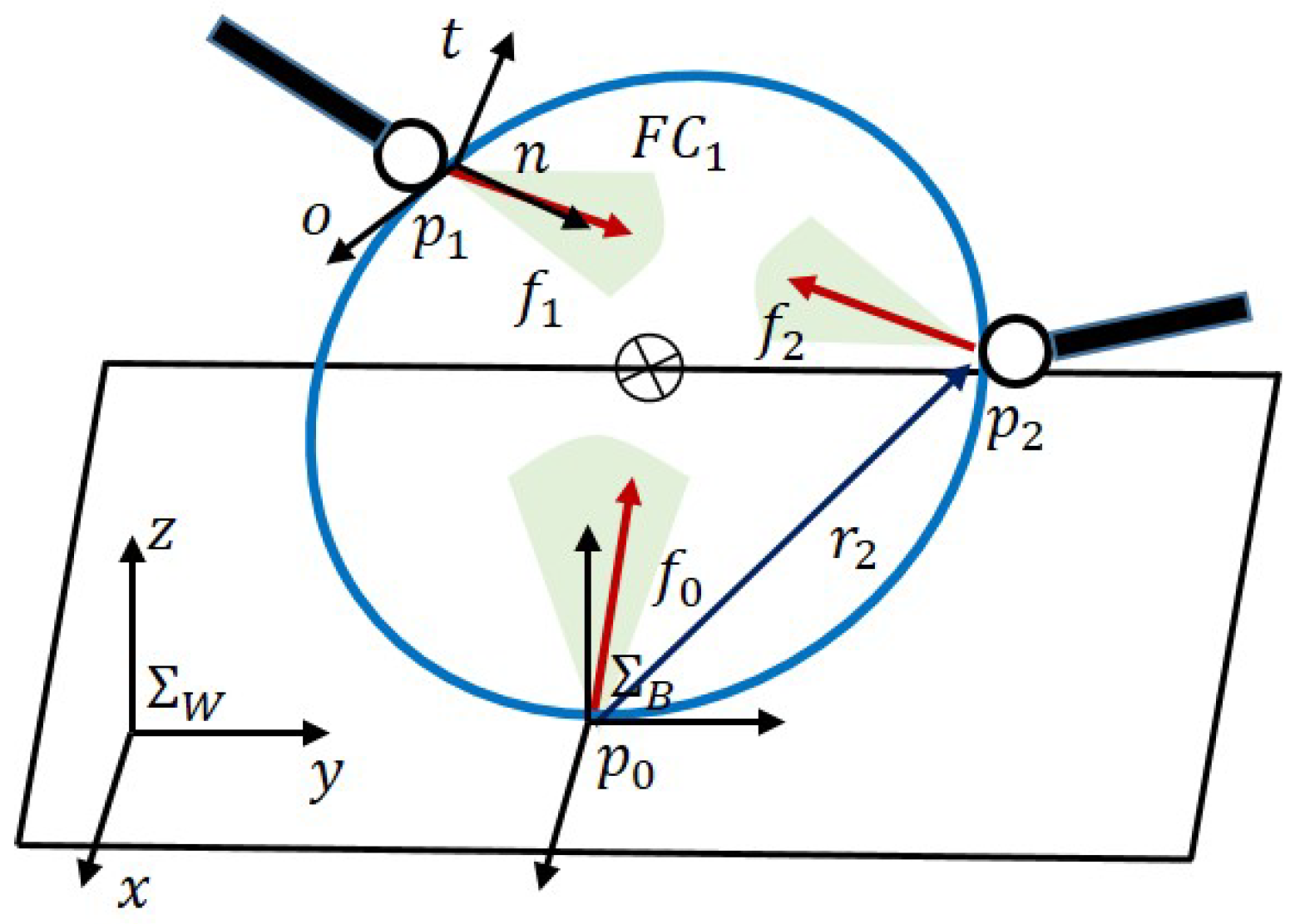
4.3. Grasp Stability
5. Hierarchical Manipulation Planning
5.1. Task Level Planning
5.2. Motion Level Planning
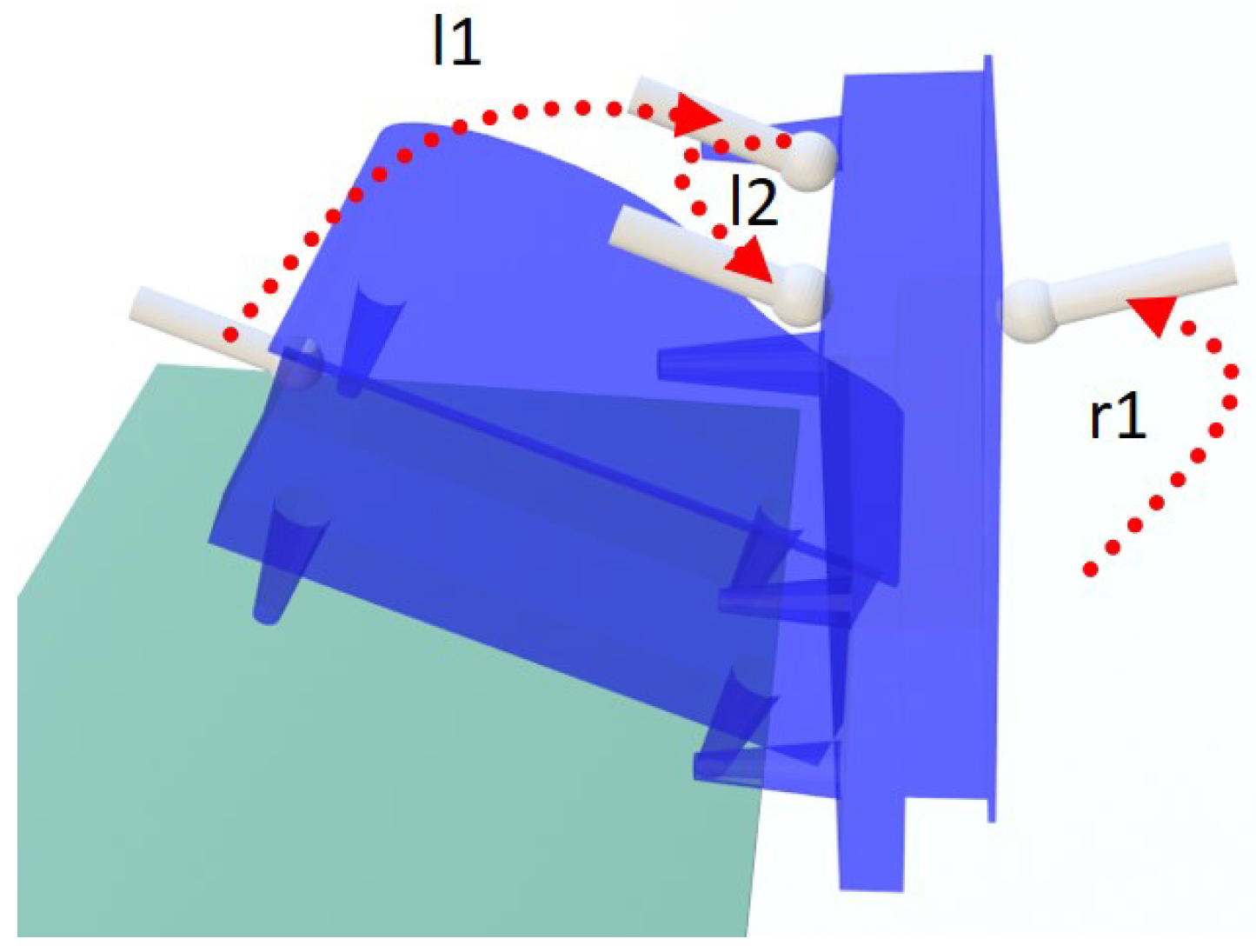
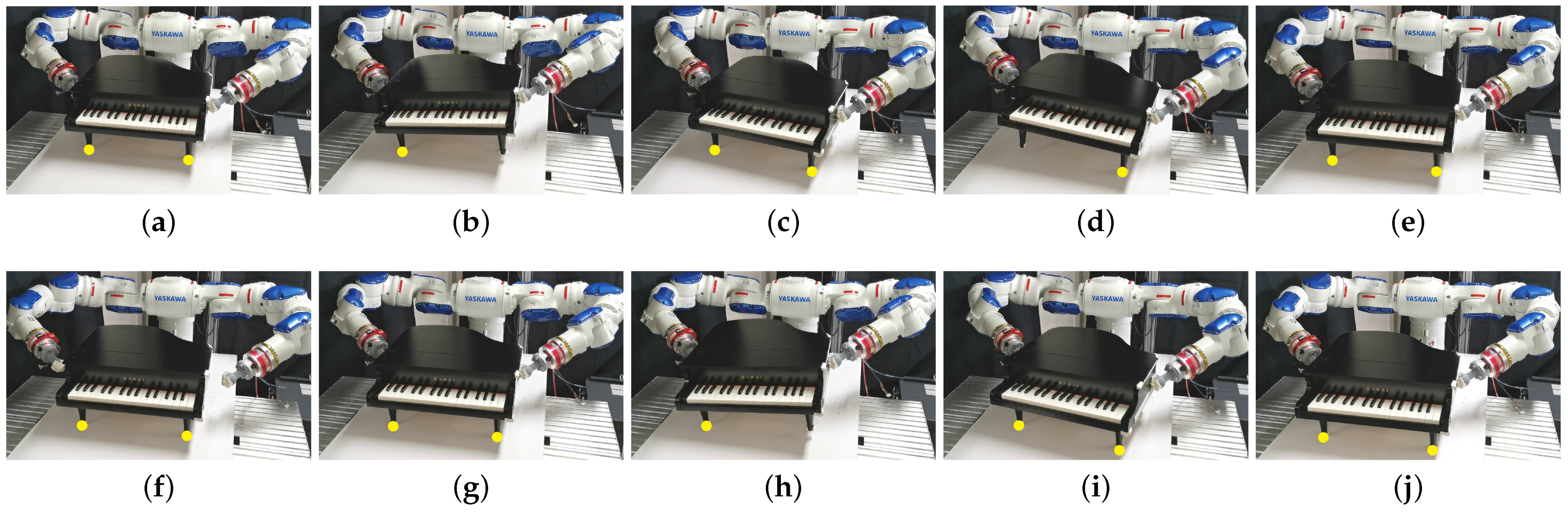
5.2.1. Pivoting
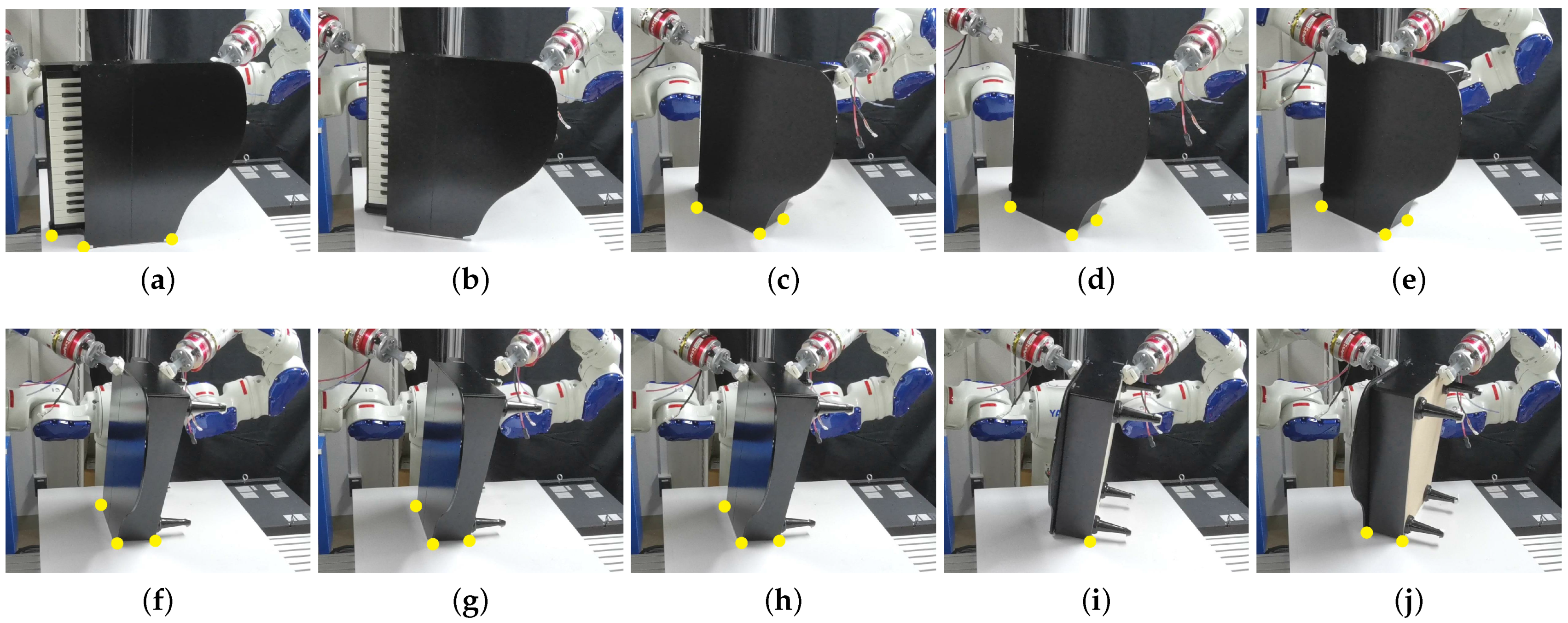
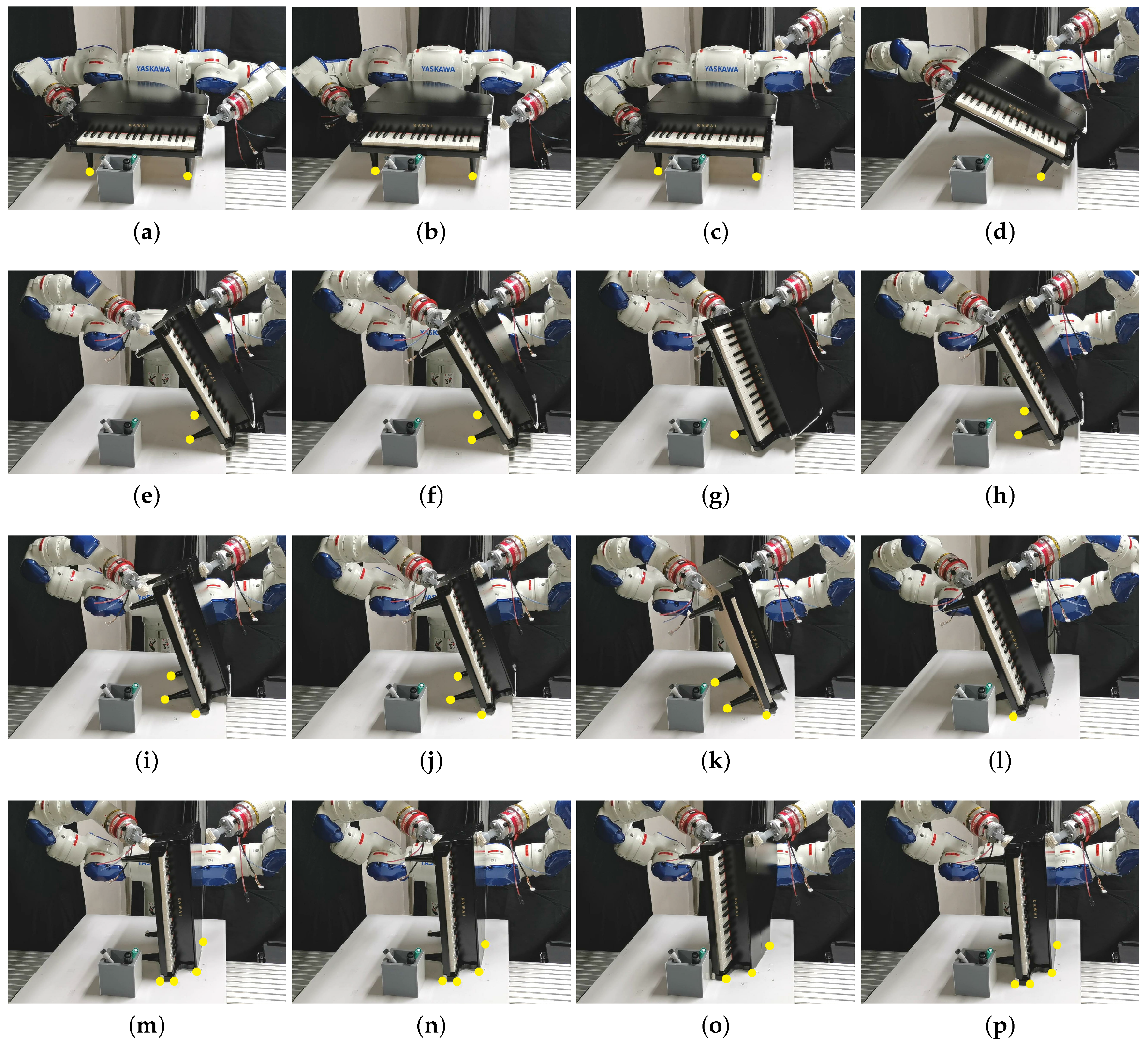
5.2.2. Tumbling and Regrasping
5.3. Graph Searching
6. Simulation and Experiments
6.1. Object Analysis
6.2. Simulation
6.3. Experiment 1: Pivoting Gait
6.4. Experiment 2: Object Orientation
6.5. Experiment 3: Obstacle Avoidance
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yoshida, E.; Blazevic, P.; Hugel, V.; Yokoi, K.; Harada, K. Pivoting a large object: Whole-body manipulation by a humanoid robot. Appl. Bionics Biomech. 2006, 3, 227–235. [Google Scholar] [CrossRef]
- Yoshida, E.; Poirier, M.; Laumond, J.P.; Kanoun, O.; Lamiraux, F.; Alami, R.; Yokoi, K. Pivoting based manipulation by a humanoid robot. Auton. Robot. 2010, 28, 77–88. [Google Scholar] [CrossRef]
- Zhang, A.; Koyama, K.; Wan, W.; Harada, K. Controlling Pivoting Gait Using Graph Model Predictive Control. IEEE Access 2021, 9, 73757–73770. [Google Scholar] [CrossRef]
- Wan, W.; Harada, K.; Kanehiro, F. Planning Grasps With Suction Cups and Parallel Grippers Using Superimposed Segmentation of Object Meshes. IEEE Trans. Robot. 2020, 37, 166–184. [Google Scholar] [CrossRef]
- Lynch, K.M.; Mason, M.T. Dynamic nonprehensile manipulation: Controllability, planning, and experiments. Int. J. Robot. Res. 1999, 18, 64–92. [Google Scholar] [CrossRef]
- Chavan-Dafle, N.; Holladay, R.; Rodriguez, A. Planar in-hand manipulation via motion cones. Int. J. Robot. Res. 2020, 39, 163–182. [Google Scholar] [CrossRef] [Green Version]
- Sawasaki, N.; INOUE, H. Tumbling objects using a multi-fingered robot. J. Robot. Soc. Jpn. 1991, 9, 560–571. [Google Scholar] [CrossRef]
- Trinkle, J.C. On the stability and instantaneous velocity of grasped frictionless objects. IEEE Trans. Robot. Autom. 1992, 8, 560–572. [Google Scholar] [CrossRef]
- Erdmann, M.A.; Mason, M.T. An exploration of sensorless manipulation. IEEE J. Robot. Autom. 1988, 4, 369–379. [Google Scholar] [CrossRef] [Green Version]
- Satici, A.C.; Ruggiero, F.; Lippiello, V.; Siciliano, B. A coordinate-free framework for robotic pizza tossing and catching. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3932–3939. [Google Scholar]
- Cigliano, P.; Lippiello, V.; Ruggiero, F.; Siciliano, B. Robotic ball catching with an eye-in-hand single-camera system. IEEE Trans. Control Syst. Technol. 2015, 23, 1657–1671. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Xiong, R.; Zhu, Q.; Wu, J.; Chu, J. Balance motion generation for a humanoid robot playing table tennis. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 19–25. [Google Scholar]
- Ramirez-Alpizar, I.G.; Higashimori, M.; Kaneko, M.; Tsai, C.H.; Kao, I. Nonprehensile dynamic manipulation of a sheet-like viscoelastic object. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5103–5108. [Google Scholar]
- Hou, Y.; Jia, Z.; Mason, M.T. Fast planning for 3d any-pose-reorienting using pivoting. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1631–1638. [Google Scholar]
- Aiyama, Y.; Inaba, M.; Inoue, H. Pivoting: A new method of graspless manipulation of object by robot fingers. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’93), Yokohama, Japan, 26–30 July 1993; Volume 1, pp. 136–143. [Google Scholar]
- Doshi, N.; Hogan, F.R.; Rodriguez, A. Hybrid differential dynamic programming for planar manipulation primitives. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 31–31 August 2020; pp. 6759–6765. [Google Scholar]
- Raessa, M.; Wan, W.; Harada, K. Planning to repose long and heavy objects considering a combination of regrasp and constrained drooping. Assem. Autom. 2021. [Google Scholar] [CrossRef]
- Yoshida, E.; Poirier, M.; Laumond, J.P.; Alami, R.; Yokoi, K. Pivoting based manipulation by humanoids: A controllability analysis. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1130–1135. [Google Scholar]
- Yoshida, E.; Poirier, M.; Laumond, J.P.; Kanoun, O.; Lamiraux, F.; Alami, R.; Yokoi, K. Regrasp planning for pivoting manipulation by a humanoid robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2467–2472. [Google Scholar]
- Shi, F.; Zhao, M.; Murooka, M.; Okada, K.; Inaba, M. Aerial Regrasping: Pivoting with Transformable Multilink Aerial Robot. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 200–207. [Google Scholar]
- Fakhari, A.; Patankar, A.; Chakraborty, N. Motion and Force Planning for Manipulating Heavy Objects by Pivoting. arXiv 2020, arXiv:2012.06022. [Google Scholar]
- Murooka, M.; Nozawa, S.; Bando, M.; Yanokura, I.; Okada, K.; Inaba, M. Simultaneous planning and estimation based on physics reasoning in robot manipulation. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 3137–3144. [Google Scholar]
- Murooka, M.; Ueda, R.; Nozawa, S.; Kakiuchi, Y.; Okada, K.; Inaba, M. Global planning of whole-body manipulation by humanoid robot based on transition graph of object motion and contact switching. Adv. Robot. 2017, 31, 322–340. [Google Scholar] [CrossRef]
- Siméon, T.; Laumond, J.P.; Cortés, J.; Sahbani, A. Manipulation planning with probabilistic roadmaps. Int. J. Robot. Res. 2004, 23, 729–746. [Google Scholar] [CrossRef] [Green Version]
- Lozano-Pérez, T.; Kaelbling, L.P. A constraint-based method for solving sequential manipulation planning problems. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3684–3691. [Google Scholar]
- Srivastava, S.; Fang, E.; Riano, L.; Chitnis, R.; Russell, S.; Abbeel, P. Combined task and motion planning through an extensible planner-independent interface layer. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 639–646. [Google Scholar]
- Lee, G.; Lozano-Pérez, T.; Kaelbling, L.P. Hierarchical planning for multi-contact non-prehensile manipulation. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 264–271. [Google Scholar]
- Suárez-Ruiz, F.; Zhou, X.; Pham, Q.C. Can robots assemble an IKEA chair? Sci. Robot. 2018, 3, eaat6385. [Google Scholar] [CrossRef] [PubMed]
- Tournassoud, P.; Lozano-Pérez, T.; Mazer, E. Regrasping. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1987; Volume 4, pp. 1924–1928. [Google Scholar]
- Berenson, D.; Srinivasa, S.; Kuffner, J. Task space regions: A framework for pose-constrained manipulation planning. Int. J. Robot. Res. 2011, 30, 1435–1460. [Google Scholar] [CrossRef]
- Bouyarmane, K.; Kheddar, A. Humanoid robot locomotion and manipulation step planning. Adv. Robot. 2012, 26, 1099–1126. [Google Scholar] [CrossRef]
- Harada, K.; Tsuji, T.; Laumond, J.P. A manipulation motion planner for dual-arm industrial manipulators. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 928–934. [Google Scholar]
- Hayashi, N.; Suehiro, T.; Kudoh, S. Planning method for a wrapping-with-fabric task using regrasping. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1285–1290. [Google Scholar]
- Wan, W.; Harada, K.; Kanehiro, F. Preparatory manipulation planning using automatically determined single and dual arm. IEEE Trans. Ind. Inform. 2019, 16, 442–453. [Google Scholar] [CrossRef] [Green Version]
- Mason, M.; Salisbury, K. Robot Hands and the Mechanics of Manipulation (Artificial Intelligence); The MIT Press: Cambridge, MA, USA, 1985. [Google Scholar]
- Nguyen, V.D. Constructing force-closure grasps. Int. J. Robot. Res. 1988, 7, 3–16. [Google Scholar] [CrossRef]
- Liu, Y.H. Computing n-finger form-closure grasps on polygonal objects. Int. J. Robot. Res. 2000, 19, 149–158. [Google Scholar] [CrossRef]
- Ponce, J.; Sullivan, S.; Sudsang, A.; Boissonnat, J.D.; Merlet, J.P. On computing four-finger equilibrium and force-closure grasps of polyhedral objects. Int. J. Robot. Res. 1997, 16, 11–35. [Google Scholar] [CrossRef]
- Montana, D.J. The Condition for Contact Grasp Stability; IEEE International Conference on Robotics and Automation (ICRA): Sacramento, CA, USA, 9 April 1991; pp. 412–417. [Google Scholar]
- Bicchi, A. On the closure properties of robotic grasping. Int. J. Robot. Res. 1995, 14, 319–334. [Google Scholar] [CrossRef]
- Howard, W.S.; Kumar, V. On the stability of grasped objects. IEEE Trans. Robot. Autom. 1996, 12, 904–917. [Google Scholar] [CrossRef]
- Harada, K.; Tsuji, T.; Nagata, K.; Yamanobe, N.; Maruyama, K.; Nakamura, A.; Kawai, Y. Grasp planning for parallel grippers with flexibility on its grasping surface. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; pp. 1540–1546. [Google Scholar]
- Hang, K.; Stork, J.A.; Kragic, D. Hierarchical fingertip space for multi-fingered precision grasping. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1641–1648. [Google Scholar]
- Romano, J.M.; Hsiao, K.; Niemeyer, G.; Chitta, S.; Kuchenbecker, K.J. Human-inspired robotic grasp control with tactile sensing. IEEE Trans. Robot. 2011, 27, 1067–1079. [Google Scholar] [CrossRef]
- Deng, Z.; Jonetzko, Y.; Zhang, L.; Zhang, J. Grasping force control of multi-fingered robotic hands through tactile sensing for object stabilization. Sensors 2020, 20, 1050. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ozawa, R.; Tahara, K. Grasp and dexterous manipulation of multi-fingered robotic hands: A review from a control view point. Adv. Robot. 2017, 31, 1030–1050. [Google Scholar] [CrossRef]
- Mikolajczyk, T.; Bednarczyk, K.; Mikolajczyk, A. Model of human hand controlled using pneumatic muscles. Applied Mechanics and Materials. Trans. Tech. Publ. 2014, 555, 155–162. [Google Scholar]
- Szkopek, J.; Redlarski, G. Artificial-Hand Technology—Current State of Knowledge in Designing and Forecasting Changes. Appl. Sci. 2019, 9, 4090. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.L.; Lozano-Perez, T. Planning two-fingered grasps for pick-and-place operations on polyhedra. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, LA, USA, 13–18 May 1990; pp. 683–688. [Google Scholar]
- Wolter, J.D.; Volz, R.A.; Woo, A.C. Automatic generation of gripping positions. IEEE Trans. Syst. Man Cybern. 1985, 15, 204–213. [Google Scholar] [CrossRef]
- Hang, K.; Li, M.; Stork, J.A.; Bekiroglu, Y.; Pokorny, F.T.; Billard, A.; Kragic, D. Hierarchical fingertip space: A unified framework for grasp planning and in-hand grasp adaptation. IEEE Trans. Robot. 2016, 32, 960–972. [Google Scholar] [CrossRef] [Green Version]
- Matoušek, J.; Schwarzkopf, O. On ray shooting in convex polytopes. Discret. Comput. Geom. 1993, 10, 215–232. [Google Scholar] [CrossRef] [Green Version]
- Bern, M.; Eppstein, D. Mesh generation and optimal triangulation. Comput. Euclidean Geom. 1992, 1, 23–90. [Google Scholar]
- Halperin, D. Robust geometric computing in motion. Int. J. Robot. Res. 2002, 21, 219–232. [Google Scholar] [CrossRef]
- Strandberg, M.; Wahlberg, B. A method for grasp evaluation based on disturbance force rejection. IEEE Trans. Robot. 2006, 22, 461–469. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process | Computational Costs | Results | Number |
|---|---|---|---|
| Superimposed segments | 0.354 s | Faces of the object | 262 |
| Sampling | 0.075 s | Contact points | 388 |
| Refine samples and plan contact pairs | 2.115 s | Contact pairs | 107 |
| Methods for Generating Motions | Ability to Regrasp | Error (x-axis) |
|---|---|---|
| The graph MPC | No | −12.5 cm |
| The proposed planner | Yes | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, A.; Koyama, K.; Wan, W.; Harada, K. Manipulation Planning for Large Objects through Pivoting, Tumbling, and Regrasping. Appl. Sci. 2021, 11, 9103. https://doi.org/10.3390/app11199103
Zhang A, Koyama K, Wan W, Harada K. Manipulation Planning for Large Objects through Pivoting, Tumbling, and Regrasping. Applied Sciences. 2021; 11(19):9103. https://doi.org/10.3390/app11199103
Chicago/Turabian StyleZhang, Ang, Keisuke Koyama, Weiwei Wan, and Kensuke Harada. 2021. "Manipulation Planning for Large Objects through Pivoting, Tumbling, and Regrasping" Applied Sciences 11, no. 19: 9103. https://doi.org/10.3390/app11199103
APA StyleZhang, A., Koyama, K., Wan, W., & Harada, K. (2021). Manipulation Planning for Large Objects through Pivoting, Tumbling, and Regrasping. Applied Sciences, 11(19), 9103. https://doi.org/10.3390/app11199103