1. Introduction of Interconnected System
With the rapid developments of modern techniques, interconnections are becoming very common in modern control systems. The interconnected system here refers to the system composed of interacting subsystems either due to physical system structure or purposes of convenient analysis. The system or process itself may be the result of a series connection, parallel connection, and feedback interconnection of various subsystems [
1]. For instance, a modern system is usually interfaced with multiple sensors, actuators, and process components. Therefore, a typical system can be viewed as composed of at least three interconnecting subsystems—actuator, sensor, and process subsystems. In order to ensure the normal operation of the whole system, the functions of these three parts must be normal. In addition, each subsystem can also be regarded as a series of dynamic subsystems, because each subsystem itself can be viewed as a dynamic system. In all cases, the global plant, as well as each subsystem, can be analyzed at different levels, up to the component level, to assess the reliability of the entire plant. It is becoming increasingly important to study the interconnected systems in analyzing dynamic systems, due to the fact that it allows to investigating less complicated components to study the properties of a complex system [
2]. However, because of the requirement of a large amount of identification data or deep physical insight, the modeling and analysis of interconnected systems are challenging [
3].
The concerning problems of interconnected systems are of great importance from a theoretical and practical viewpoint and have been studied extensively. The published research results involve the problems of stability, observability, controllability, and invertibility of interconnected systems; for example, in [
4,
5,
6,
7,
8]. As shown in [
8], the study provided a method to distinguish several dynamic subsystems, and it proved that there are usually delays during information transmission. This will lead to the instability and oscillation of these systems. Therefore, many investigations are devoted to the stability of these systems. As illustrated in [
4], the study derives a condition to ensure input to the stable state of an interconnected system, that is, to guarantee input to the stable state of both subsystems. In addition to stability, the controllability of interconnected systems was also addressed. Networked control systems are widely used in various fields of engineering; for example, in power generation and distribution systems [
9], automotive control systems [
10], cooperative control of unmanned vehicles [
11], etc. The forms of interconnected systems also vary in the existing research. In most studies on tackling power series, the form of analytic functions interconnections was employed, e.g., [
12]. In [
13], an interconnected system constituted with a nonlinear followed by a linear time-invariant dynamical system was analyzed. The observability of an interconnected system composed of a partial differential equation (PDE) and an ordinary differential equation (ODE) was discussed in [
14]. Two Fliess operators’ compositions were found in [
15]. In [
16], the interconnections of bilinear subsystems were discussed.
When studying the characteristics of interconnected systems, the interconnected system composed of cascaded subsystems has received extensive attention. Generally speaking, due to the limitation of computational availability, system complexity, or communication bandwidth in the practical engineering world, it is very difficult to analyze cascaded interconnected systems with centralized structures [
17]. Therefore, increasing attention has been paid in recent years to the research of distributed or decentralized methods. However, distributed analysis becomes more challenging due to the interaction between subsystems and the limited information available to each subsystem. Therefore, a problem worthy of attention is whether it can be proved that, under certain conditions, the influence of the lower subsystem can be distinguished on the higher subsystem, so as to avoid the complete measurement of the local subsystem. This can be regarded as a problem of the system’s invertibility because one of the important objectives of invertibility analysis is to prove that the input or unknown input of the control system is distinguished.
In the past 50 years, due to its important theoretical and practical significance, the invertibility of the system has been widely studied. The research on the invertibility of nonlinear systems began in reference [
18]. In this paper, Silverman’s structural algorithm was extended to multiple-input multiple-output (MIMO) nonlinear systems. After that, the algorithm was modified in reference [
19], which aimed at covering more kinds of systems. Similar literature related to the extension of the algorithm can be found in papers [
20,
21,
22,
23,
24,
25]. The invertibility of the system in the literature is related to the distinguishability of the system. The distinguishability of two variables refers to their ability to produce recognizable output for a given system. Some concepts of distinguishability or invertibility can be found in the literature, as in [
18,
22,
26,
27]. For example, the problem of the invertibility of switched linear systems was produced by Vu and Liberzon in [
28], in which they discussed the ability to determine the active mode of the system from the input and output data. The idea was further extended to a nonlinear system in [
27] and applied to fault diagnosis in [
29].
In the above studies, the analysis of cascaded nonlinear systems received less attention. However, it is usually very important to describe the properties of composite systems, especially when the subsystems are nonlinear [
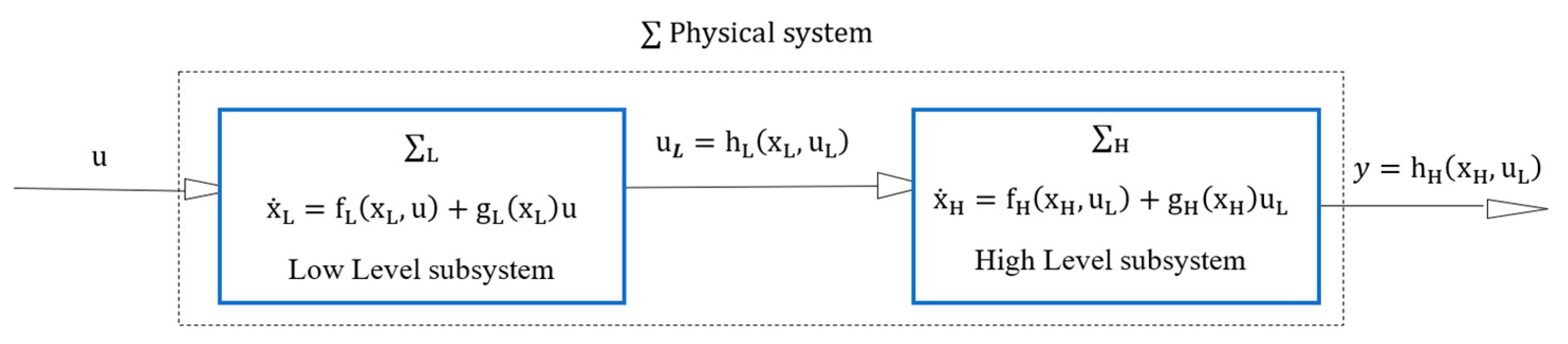
30]. This paper considered a cascaded interconnected system consisting of two dynamic subsystems for physical or analysis purposes. The interconnection of two physical devices means that some variables associated with the first device are also variables or impact variables associated with the second device. Specifically, the problem is to give a sufficient and/or necessary condition, under which, given initial states, a local input can produce a distinguishable output of an interconnected system constituting two nonlinear subsystems. The essence of the problem is whether it can be proved that, under certain conditions, the input of the lower subsystem has a significant impact on the output of the higher subsystem. In order to solve this problem, the invertibility of cascaded interconnected systems is derived. The left invertibility of the interconnected system is capable of ensuring that the impacts of local variables on the global level are distinguishable. The property of distinguishability of two inputs or parameters refers to their capacity to generate different output signals for a given input signal. The discussion of invertibility is of great significance in practical engineering. For example, for the problem of fault detection and isolation (FDI), a significant way is to treat the fault as an unknown input, and the motivation of invertibility is actually to detect and isolate the input, that is, to identify the possible location and time of the fault in the system; for example, in [
29,
31,
32,
33]. The contribution of this paper mainly lies in that it emphasizes the importance of the influences of local internal dynamics (actuator) on the global dynamics of the control system. Thus, it provides a basis for allowing the analysis of less complex subcomponents to study the characteristics of the interconnected systems.
The paper is organized as follows:
Section 2 is devoted to the definition of invertibility of an interconnected dynamic system. In
Section 3, conditions are given to validate involving definitions. Then, the procedure of computation of the inverse of the interconnected system is presented in
Section 4. Numerical simulations are carried out to verify the effectiveness and robustness of the proposed method in
Section 5. Finally, discussions and conclusions are made in
Section 6.
3. On the Condition of Invertibility of the Interconnected System
The system under consideration is an interconnected system, resulting in the unavailability of classical inversion technologies. It is therefore necessary to investigate a new toolset for guaranteeing the invertibility of interconnected systems. The problem of the inverse of interconnected systems can be regarded as a combination of invertible mappings and individual input recovery. Therefore, the basic idea of solving the invertibility problem is to utilize the relationship between the output and the state of the subsystem to synthesize the mapping and then use the nonlinear structure algorithm to recover the input of the corresponding subsystem. It can be concluded from Definition 2 that the interconnected system cannot be invertible, no matter whether the high-level or low-level subsystem is invertible or not. Therefore, the necessary and sufficient conditions for invertibility of interconnected systems on set can be given from the view of the individual subsystem.
Theorem 1. Consider the interconnected systemwhich consists of two subsystems: low-leveland high-levelsubsystems depicted by (1) and (2), and an output set. The interconnected system is invertible atover,if and only if each subsystem, the low-leveland the high-level, is invertible atoverandover, respectively.
Proof. Consider as the input–output mapping of low-level subsystem, while is the input–output mapping of high-level subsystem. Then the composition can be considered as the input–output mapping of the interconnected system.
In order to confirm the theorem, it needs to provide a condition from both sufficiency and necessity aspects. To begin with the sufficiency condition, the invertibility of a dynamic system refers to the bijective of the input–output mapping. Since both subsystems are invertible, the corresponding mapping and mapping are bijective mappings. Moreover, the composition of two bijective mappings is a bijective mapping, so input–output mapping of the cascade system is bijective. Thus, the cascade interconnected system is invertible.
The next task is to produce a necessary condition. It can be achieved by the non-invertibility of either subsystem. That is to say if any of the subsystems is not invertible at, then the interconnected system is also not invertible.
On one hand, suppose that the high-level subsystem
is not invertible, then no matter whether the low-level subsystem
is invertible or not, for the low-level subsystem described in (1), fix an output set
and consider an arbitrary interval
Two distinct inputs exist for
on
and it is possible to generate two different outputs
. However, for the high-level subsystem in (2), even if the invertibility of this subsystem is guaranteed, fix an output set
. These distinguishable inputs
on
may generate two equal outputs
. Thus, from the aspect of the global level, these two distinct original local inputs
on
produce two equal global outputs
on
:
As a result, the interconnected system can not be invertible at over .
For the other, suppose that the low-level subsystem
is not invertible, then no matter whether the high-level subsystem
is invertible or not, for the low-level subsystem
in (1), fix an output set
and consider an arbitrary interval
Two different local inputs exist for
on
that can produce two equal outputs:
. From the aspect of global level, even if invertibility of the high-level subsystem
in (2) is ensured, these equal inputs
on
are only capable of producing two equal outputs
at the final level. Thus, for the cascade interconnected system, two different local inputs
on
produce two equal global outputs
on
:
As a result, the interconnected system can not be invertible at over . □
Theorem 2. Consider the interconnected systemconsists of two subsystems: the low-leveland the high-levelsubsystems depicted by (1) and (2), and an output set. The interconnected system is strongly invertible atoverif and only if each low-leveland high-levelsubsytems is strongly invertible atoverandoverrespectively.
Remark 1. If the interconnected systemdepicted by (1) and (2) is globally invertible, then the local inputs can be uniquely recovered over the time interval. Moreover,can be arbitrarily large if the state trajectories do not show a finite escape time.
From Theorem 2, in order to obtain the invertibility of the studied interconnected system, the key criterion is to ensure the invertibility of the individual subsystem. In a differential-algebraic setting, the left invertibility can be determined in terms of the differential output rank of the system (see [
30,
31,
34])
Definition 3. The differential output rankof a system is equal to the differential transcendence degree of the differential extensionover the differential field, i.e., .
Property 1. The differential output rankof a system is smaller or equal towhereare the total number of inputs and outputs, respectively. The differential output rank ρ is also the maximum number of outputs that are related by a differential polynomial equation with coefficients over (independent of and).
Theorem 3. A system is left-invertible if and only if the differential output rankρis equal to the total number of inputs, e.g.,in (2).
That is, if the differential output rank is equal to the number of the inputs, the system is invertible. This implies that the number of outputs must be greater, or equal to the number of inputs.
4. On Computation of the Dynamics Inverse of the Interconnected System
After verifying the invertibility of the interconnected system, it is capable of recovering the original inputs uniquely from the global measurement. It implies that each original local input affects the global output distinguishably. In fact, if a system is invertible, there are already structure algorithms that allow one to express the input as a function of the output, its derivatives, and possibly some states (for example, in [
4,
21,
23,
33]).
A methodology given in Theorem 1 is now capable of checking the invertibility of a nonlinear system. Considering the interconnected input–output system with two subsystems and from inputs into outputs, its composition input–output map is. If the interconnected system is left invertible, there exists an input–output system from inputs into outputs, and the inverse composition map is defined as such that the cascade system is the identity. In our mainly algebraic setting, it was supposed that, are a good class of functions equipped with an algebraic structure; for example, they are differential vector space. Then the inverse of the interconnected system is defined as in Theorem 3.
Theorem 4. Consider the interconnected systemthat consists of two subsystems: the low-leveland high-levelsubsystems, and an input–output set. If the interconnected system is strongly invertible atover, then the inverse interconnected system can also be an interconnected system with the input–output set as follows: Proof. Supposed that both and are invertible, then , and =. □
Thus, for any
one can obtain
It follows that . Similarly, one can show that. Therefore, is invertible with inverse.
It can be seen from
Figure 3 that the inverse system of an interconnected system can also be regarded as an interconnected system, and its components are the inverse subsystems of each subsystem. In the interconnected inverse system, the global output is the original input of the interconnected system. This implies that it is capable of distinguishing the impacts of each local input on the global output. To compute the inverse of an input affine interconnected system, the structure algorithm allows us to express the input as a function of the output, its derivatives, and possibly some states, as shown in [
4].
For the high-level subsystem depicted in (2), the expression of its inverse dynamics can be realized as from (7):
where
is a function of the state
of the high-level subsystem.
For the low-level subsystem depicted in (1), the expression of its inverse dynamics can be realized as from (8):
where
is a function of the state
of the low-level subsystem.
Inverse dynamics (7), together with inverse dynamics (8), constitutes the inverse of the studied interconnected system. It can be seen that the basis of the proposed calculation of the inverse of the interconnected dynamic system is the existence of left invertibility of the original interconnected cascade system. The feasibility of the input-based inverse reconstruction method is determined by the existence of left invertibility. For the interconnected inverse system, the output is the input of the original system, while the input is the output of the original global system and its possible time derivative. A series of invertibility related analysis has shown that a key point is the concept of relative degree. The theory is suitable for linear time-invariant and nonlinear systems with vector relativity. More details about the relative degree can be found in reference [
4].
Definition 4. (Relative degree of nonlinear systems). For the invertible dynamic system described by (2), the relative degreeof the outputwith respect to the input vectoris the smallest integer which is defined bywhererepresent the Lie derivatives of a real functionalong the vector field.
Denote a matrix
as
is a nonsingular matrix with full rank:
In order to derive a function of states and output in (2) to represent as, the first step is to differentiate to obtain the derivatives:
Suppose
, one can get:
If , then
Generally speaking, it needs to continue this differential procedure, for
, one will have
Until the relative degree
, it reaches
If there are
m relative order
related to the output
, and the total relative degree satisfied (16):
then calculating expressions for their derivatives can be referred to as a one-step algorithm to obtain an inverse, and we get
the Equation (18) can be solved for
to obtain
In this situation, there will be no internal dynamics, and all the results will be finite time in nature, see reference [
34].
However, normally, the total relative degree is assumed:
In this case, the system given by (2) can be presented on a new basis that is introduced as follows:
Define the following change of the coordinates:
By applying the new local coordinates transformation proposed in [
4], if the system holds the assumption of relative degree, it is always possible to find the function
thus,
The mapping
is a local diffeomorphism, which means
Furthermore, according to [
5], if the assumption is satisfied,
Assumption 1. The distributionis involutive, then, it is always possible to identify the function in such a way that Then, the input vector
can be obtained by means of the output vector
y and its derivatives:
Fortunately, along with the discussion of this paper, linear and nonlinear problems can be treated in parallel with each other. Results for linear time-invariant (LTI) systems will always be viewed as special cases of the results obtained for the nonlinear problems specified by the general input affine nonlinear system model.
6. Conclusions
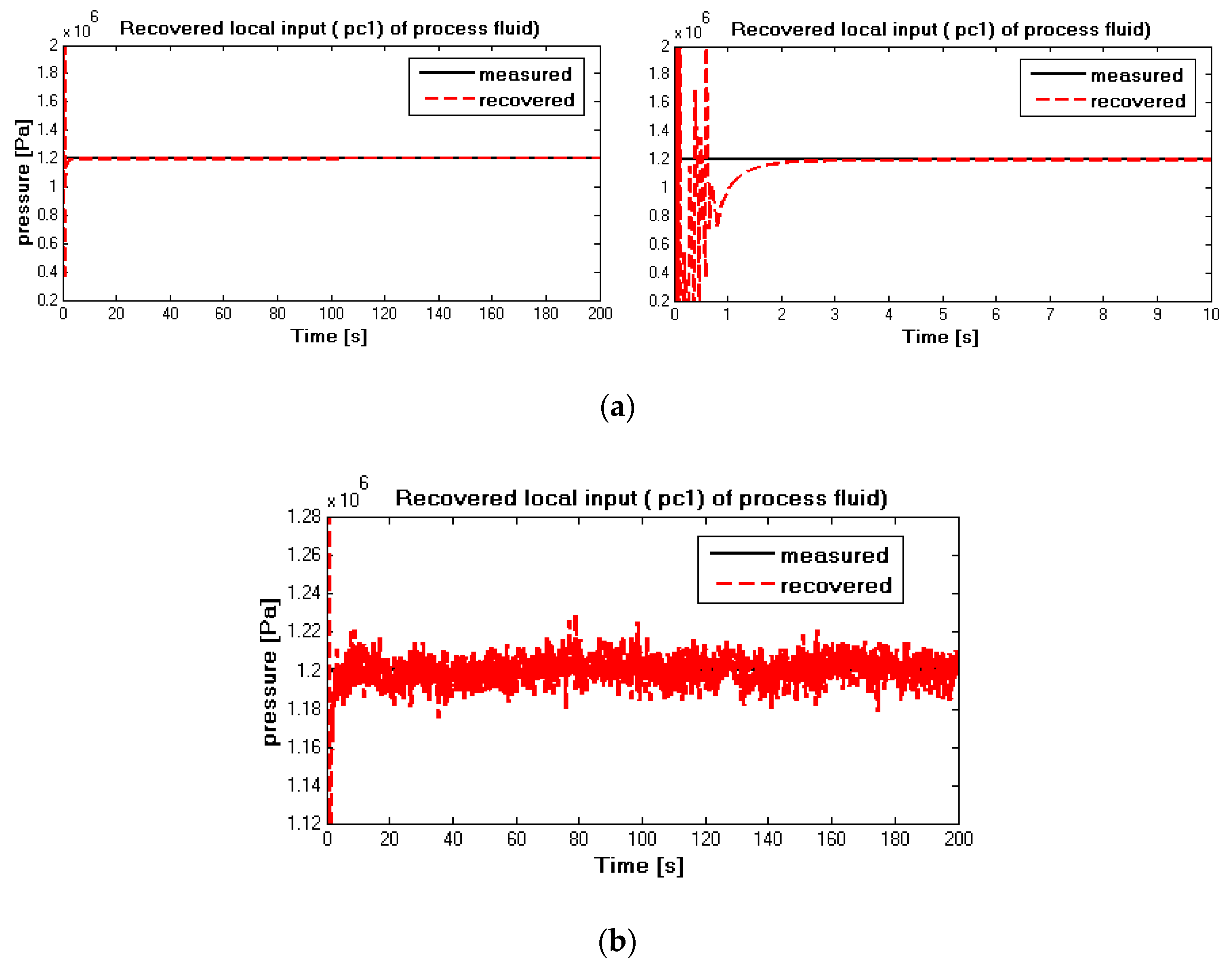
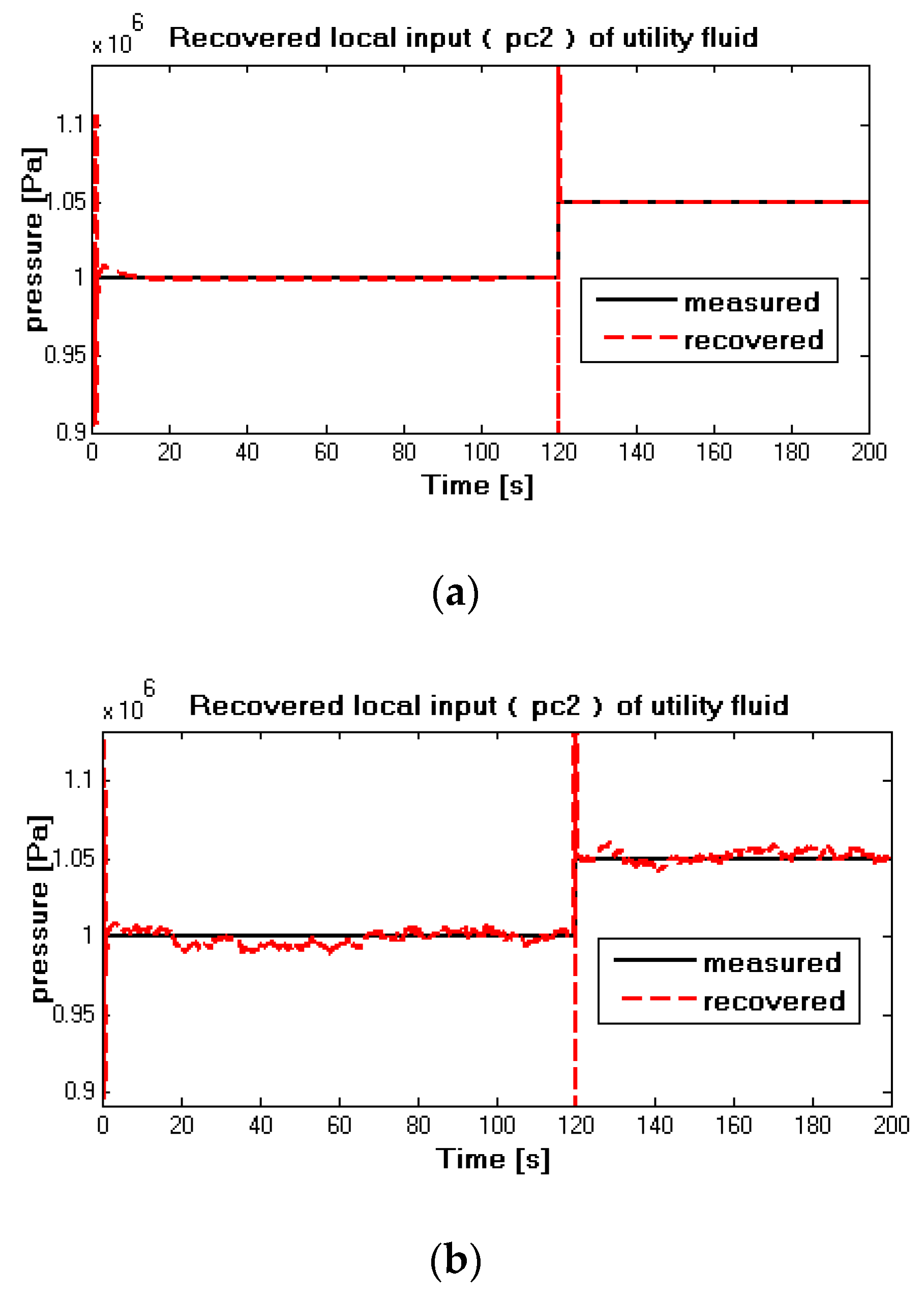
In this paper, the invertibility of a nonlinear interconnected system consisting of two nonlinear affine subsystems was studied. A necessary and sufficient condition for guaranteeing the invertibility of the interconnected nonlinear system was established, involving the invertibility of individual subsystems. In order to recover the local input that yields the global output of the whole system, an algorithm was proposed that aimed at recovering the input uniquely in finite steps. Numerical simulations were included to confirm the effectiveness and robustness of the proposed methodology. Although there may be significant computation bias, especially when the output is corrupted by a high-power noise, the purpose is to confirm that the local input has a significant impact on the global level when the entire system is invertible. In this case, it allows the entire system to be monitored and analyzed on local subcomponents, but with global information.
However, in addition to the admirable features of the proposed methodology, there are open issues. An attractive direction is to establish a more constructive and relaxed condition for checking the invertibility of the interconnected systems. The goal is to verify the identifiability of the inputs (or unknown inputs), such as systems with more inputs than outputs, systems without a standard form, or with zero dynamic instability. The case where modeling uncertainties and measurement noise cannot be augmented into unknown input could be another interesting research direction in order to extend the applicability of the method proposed. Another problem to be solved is to verify the stability and sensitivity of the estimation error to prove that the required modeling information can be scaled without destroying the instability of the input reconstruction algorithm.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















