
Stochastic Model-Predictive Control with Uncertainty Estimation for Autonomous Driving at Uncontrolled Intersections


Abstract
:1. Introduction
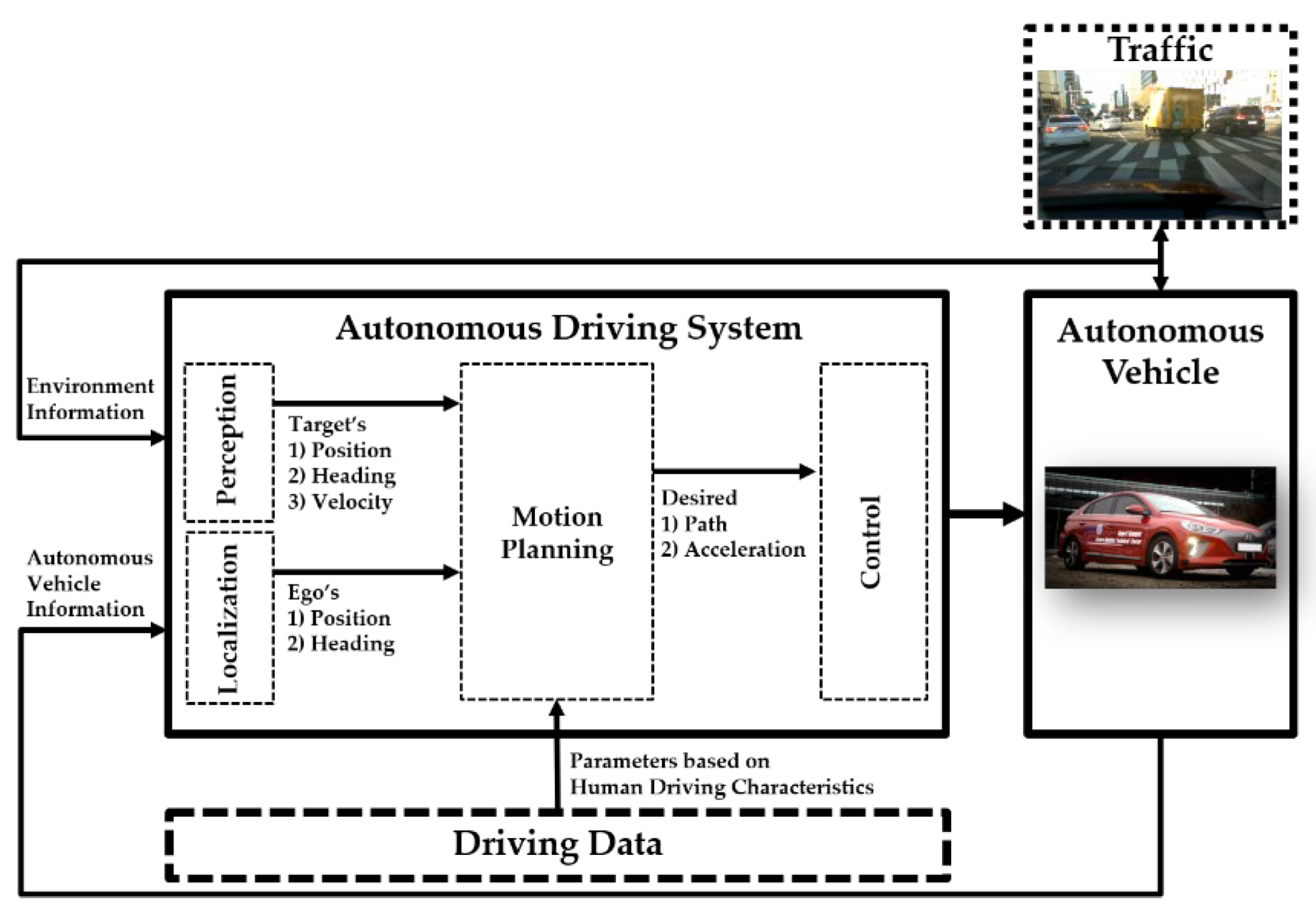
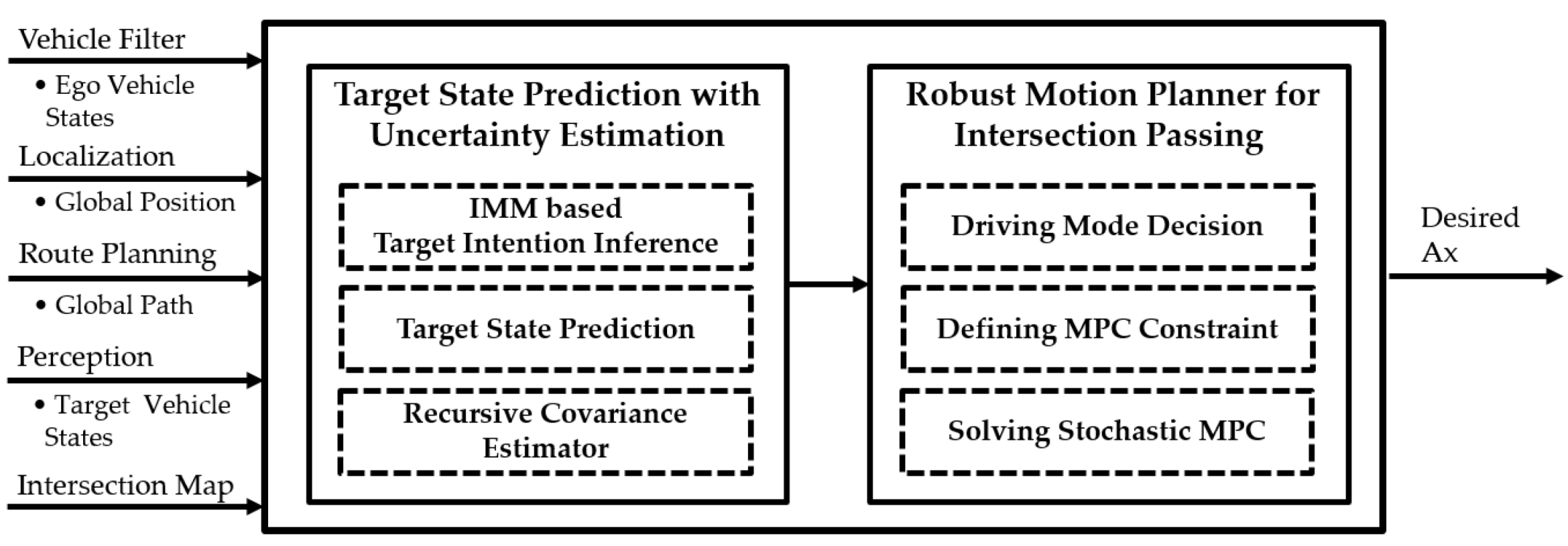
2. Overall Architecture of Proposed Algorithm
3. Target State Prediction with Uncertainty Estimation
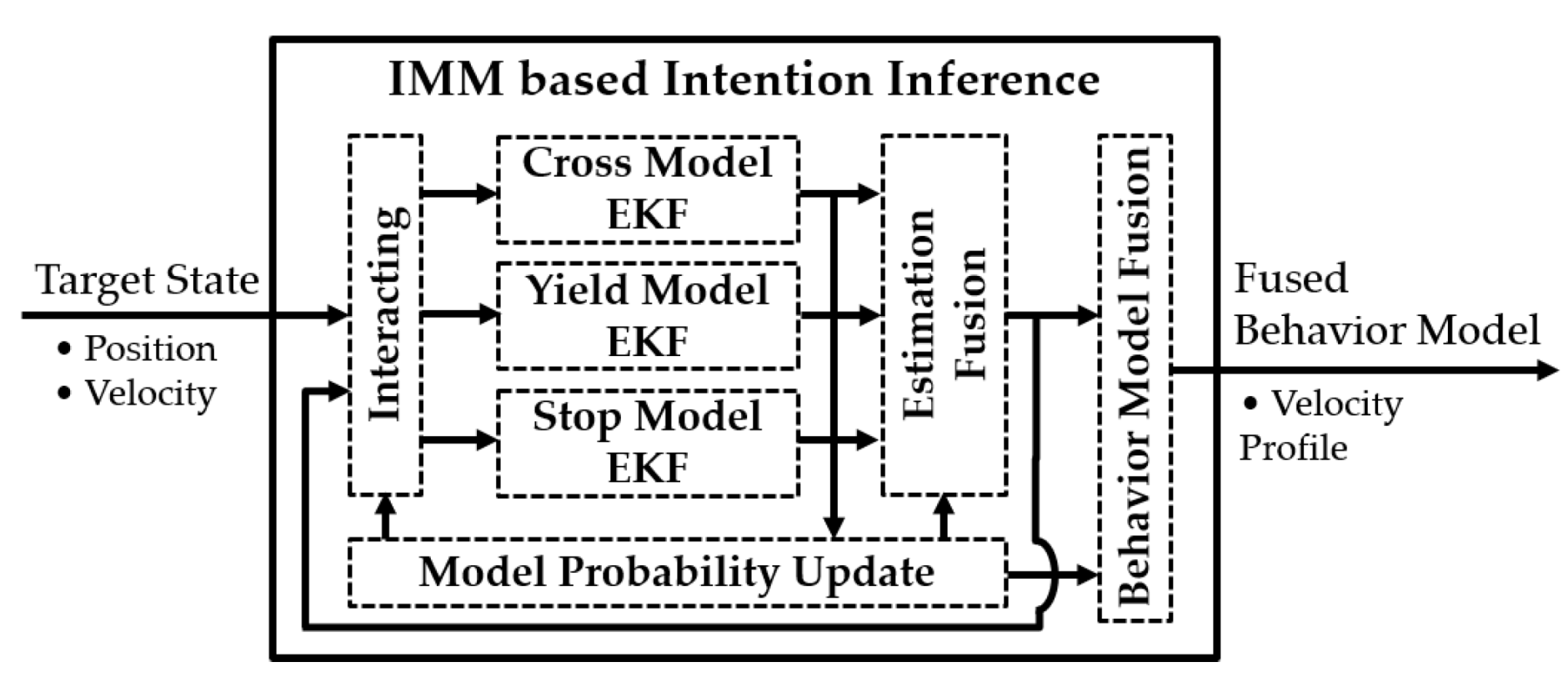
3.1. Intention Inference and State Prediction
3.2. Recursive Uncertainty Estimation
4. Target State Prediction with Uncertainty Estimation
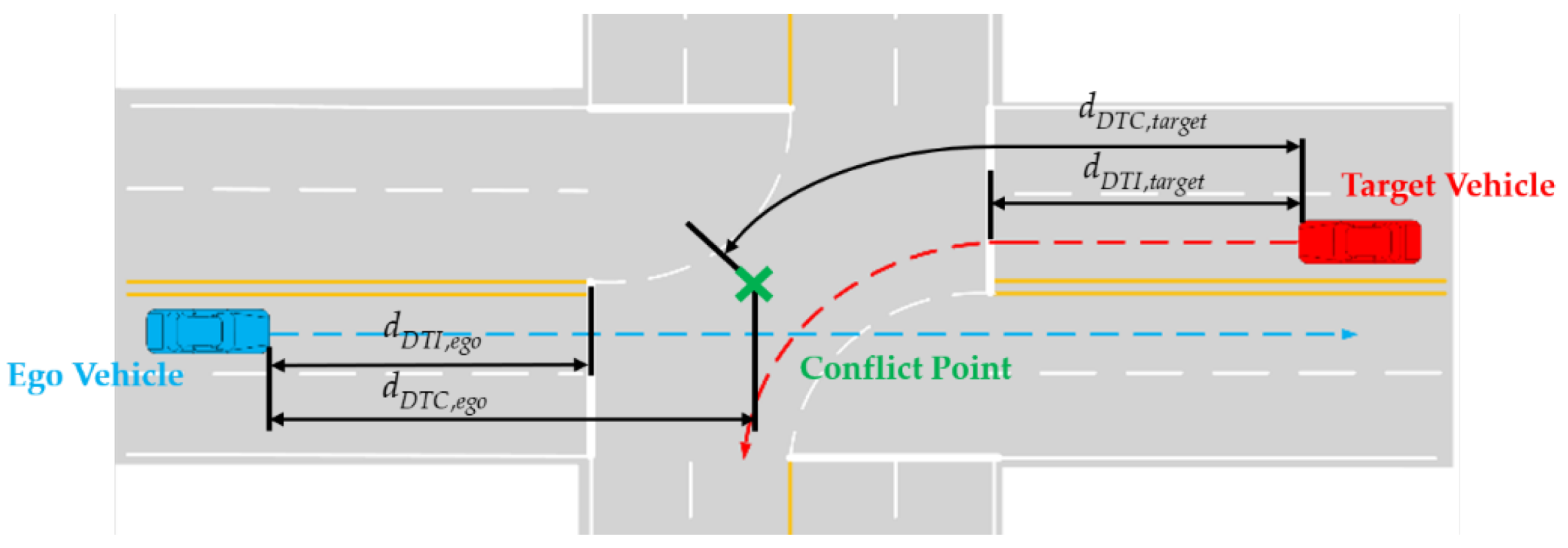
4.1. Driving Mode Decision
4.2. Stochastic Model Predictive Controller
5. Results
5.1. Case Study
5.2. Monte Carlo Simulation
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Maile, M.; Zaid, F.A.; Caminiti, L.; Lundberg, J.; Mudalige, P. Cooperative Intersection Collision Avoidance System Limited to Stop Sign and Traffic Signal Violations; RITA: Washington, DC, USA, 2008; DOT-HS-811-048. [Google Scholar]
- Bougler, B.; Cody, D.; Nowakowski, C. California Intersection Decision Support: A Driver-Centered Approach to Left-Turn Collision Avoidance System Design; PATH: Berkeley, CA, USA, 2008; UCB-ITS-PRR-2008-1. [Google Scholar]
- Poch, M.; Mannering, F. Negative binomial analysis of intersection-accident frequencies. J. Transp. Eng. 1996, 122, 105–113. [Google Scholar] [CrossRef] [Green Version]
- Polus, A. Driver behaviour and accident records at unsignalized urban intersections. Accid. Anal. Prev. 1985, 17, 25–32. [Google Scholar] [CrossRef]
- Hubmann, C.; Becker, M.; Althoff, D.; Lenz, D.; Stiller, C. Decision making for autonomous driving considering interaction and uncertain prediction of surrounding vehicles. In Proceedings of 2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; pp. 1671–1678.
- Hubmann, C.; Schulz, J.; Becker, M.; Althoff, D.; Stiller, C. Automated driving in uncertain environments: Planning with interaction and uncertain maneuver prediction. IEEE Trans. Intell. Veh. 2018, 3, 5–17. [Google Scholar] [CrossRef]
- Qiao, Z.; Muelling, K.; Dolan, J.; Palanisamy, P.; Mudalige, P. POMDP and hierarchical options MDP with continuous actions for autonomous driving at intersections. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 2377–2382. [Google Scholar]
- Brechtel, S.; Gindele, T.; Dillmann, R. Probabilistic decision-making under uncertainty for autonomous driving using continuous POMDPs. Proceedings of 17th international IEEE conference on intelligent transportation systems, Qingdao, China, 8–11 October 2014; pp. 392–399. [Google Scholar]
- Noh, S. Decision-making framework for autonomous driving at road intersections: Safeguarding against collision, overly conservative behavior, and violation vehicles. IEEE Trans. Ind. Electron. 2019, 66, 3275–3286. [Google Scholar] [CrossRef]
- Lu, G.; Li, L.; Wang, Y.; Zhang, R.; Bao, Z.; Chen, H. A rule based control algorithm of connected vehicles in uncontrolled intersection. In Proceedings of the 17th international IEEE conference on intelligent transportation systems, Qingdao, China, 8–11 October 2014; pp. 115–120. [Google Scholar]
- Li, G.; Li, S.; Li, S.; Qin, Y.; Cao, D.; Qu, X.; Cheng, B. Deep reinforcement learning enabled decision-making for autonomous driving at intersections. Automot. Innov. 2020, 3, 374–385. [Google Scholar] [CrossRef]
- Xihui, W. Predictive Motion Planning of Vehicles at Intersection Using a New GPR and RRT. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Schildbach, G.; Soppert, M.; Borrelli, F. A collision avoidance system at intersections using robust model predictive control. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; pp. 233–238. [Google Scholar]
- Nilsson, J.; Brännström, M.; Fredriksson, J.; Coelingh, E. Longitudinal and lateral control for automated yielding maneuvers. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1404–1414. [Google Scholar] [CrossRef]
- Jeong, Y.; Yi, K. Target vehicle motion prediction-based motion planning framework for autonomous driving in uncontrolled intersections. IEEE Trans. Intell. Transp. Syst. 2021, 22, 168–177. [Google Scholar] [CrossRef]
- Nor, M.H.M.; Namerikawa, T. Optimal Motion Planning of Connected and Automated Vehicles at Signal-Free Intersections with State and Control Constraints. SICE J. Control, Meas. Syst. Integr. 2020, 13, 30–39. [Google Scholar]
- Medina, A.I.M.; van de Wouw, N.; Nijmeijer, H. Cooperative intersection control based on virtual platooning. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1727–1740. [Google Scholar] [CrossRef] [Green Version]
- Choi, M.; Rubenecia, A.; Choi, H.H. Reservation-based traffic management for autonomous intersection crossing. Int. J. Distrib. Sensor Netw. 2019, 15, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Qian, B.; Zhou, H.; Lyu, F.; Li, J.; Ma, T.; Hou, F. Toward collision-free and efficient coordination for automated vehicles at unsignalized intersection. IEEE Internet Things J. 2019, 6, 10408–10420. [Google Scholar] [CrossRef]
- Tian, R.; Li, N.; Kolmanovsky, I.; Yildiz, Y.; Girard, A.R. Game-theoretic modeling of traffic in unsignalized intersection network for autonomous vehicle control verification and validation. IEEE Trans. Intell. Transp. Syst. in press. [CrossRef]
- Jeong, Y.; Yi, K.; Park, S. SVM based intention inference and motion planning at uncontrolled intersection. IFAC-PapersOnLine 2019, 52, 356–361. [Google Scholar] [CrossRef]
- Jeong, Y.; Kim, S.; Yi, K. Surround vehicle motion prediction using LSTM-RNN for motion planning of autonomous vehicles at multi-lane turn intersections. IEEE Open J. Intell. Transp. Syst. 2020, 1, 2–14. [Google Scholar] [CrossRef]
- Hafner, M.R.; Cunningham, D.; Caminiti, L.; Del Vecchio, D. Automated vehicle-to-vehicle collision avoidance at intersections. In Proceedings of the World Congress on Intelligent Transport Systems, Orlando, FL, USA, 16–20 October 2011; pp. 1–11. [Google Scholar]
- Chen, Y.; Zha, J.; Wang, J. An autonomous T-intersection driving strategy considering oncoming vehicles based on connected vehicle technology. IEEE/ASME Trans. Mechatron. 2019, 24, 2779–2790. [Google Scholar] [CrossRef]
- Lee, H.; Yoon, J.; Jeong, Y.; Yi, K. Moving Object Detection and Tracking Based on Interaction of Static Obstacle Map and Geometric Model-Free Approach for Urban Autonomous Driving. IEEE Trans. Intell. Transp. Syst. in press. [CrossRef]
- Liebcner, M.; Klanner, F.; Baumann, M.; Ruhhammer, C.; Stiller, C. Velocity-based driver intent inference at urban intersections in the presence of preceding vehicles. IEEE Intell. Transp. Syst. Mag. 2013, 5, 10–21. [Google Scholar] [CrossRef] [Green Version]
- Mazor, E.; Averbuch, A.; Bar-Shalom, Y.; Dayan, J. Interacting multiple model methods in target tracking: A survey. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 103–123. [Google Scholar] [CrossRef]
- Feng, B.; Fu, M.; Ma, H.; Xia, Y.; Wang, B. Kalman filter with recursive covariance estimation—Sequentially estimating process noise covariance. IEEE Trans. Ind. Electron. 2014, 61, 6253–6263. [Google Scholar] [CrossRef]
- Troutbeck, R.J.; Brilon, W. Unsignalized Intersection Theory; Transportation Research Board: Washington, DC, USA, 1997; Special Rep. 165. [Google Scholar]
- Chan, C.Y. Characterization of driving behaviors based on field observation of intersection left-turn across-path scenarios. IEEE Trans. Intell. Transp. Syst. 2006, 7, 322–331. [Google Scholar] [CrossRef]
- Weinert, A. Estimation of critical gaps and follow-up times at rural unsignalized intersections in Germany. In Proceedings of the Fourth International Symposium on Highway Capacity, Maui, HI, USA, 27 June–1 July 2000; pp. 409–421. [Google Scholar]
- Mesbah, A. Stochastic model predictive control: An overview and perspectives for future research. IEEE Control Syst. Mag. 2016, 36, 30–44. [Google Scholar]
- Chae, H.; Jeong, Y.; Lee, H.; Park, J.; Yi, K. Design and implementation of human driving data–based active lane change control for autonomous vehicles. Proc. Inst. Mech. Eng. D 2021, 235, 55–77. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values | Symbol | Values |
|---|---|---|---|
| dt | 0.2 s | vmax | 50 km/h |
| τx | 0.5 s | amax | 1 m/s2 |
| Np | 25 | amin | −5 m/s2 |
| TTCconf,min | 2.0 s | max | 2 m/s3 |
| Cconf,min | 5.0 m | β | 0.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, Y. Stochastic Model-Predictive Control with Uncertainty Estimation for Autonomous Driving at Uncontrolled Intersections. Appl. Sci. 2021, 11, 9397. https://doi.org/10.3390/app11209397
Jeong Y. Stochastic Model-Predictive Control with Uncertainty Estimation for Autonomous Driving at Uncontrolled Intersections. Applied Sciences. 2021; 11(20):9397. https://doi.org/10.3390/app11209397
Chicago/Turabian StyleJeong, Yonghwan. 2021. "Stochastic Model-Predictive Control with Uncertainty Estimation for Autonomous Driving at Uncontrolled Intersections" Applied Sciences 11, no. 20: 9397. https://doi.org/10.3390/app11209397
APA StyleJeong, Y. (2021). Stochastic Model-Predictive Control with Uncertainty Estimation for Autonomous Driving at Uncontrolled Intersections. Applied Sciences, 11(20), 9397. https://doi.org/10.3390/app11209397