
Optical Design and Optimization with Genetic Algorithm for High-Resolution Optics Applied to Underwater Remote-Sensing



 ,
,  ,
, 
Abstract
:1. Introduction
2. Background
2.1. Light Waves
2.2. Underwater Light Intensity
2.3. Penetration of Light Waves in a Lake
2.4. Relationship between Wavelength and Refractive Index
2.5. Variances between Wavelength and Refractive Index
2.6. Equation for the Refractive Index of Water
2.7. Distortion
2.8. Chromatic Aberration
3. Brief Introduction to Polaris
4. Methodology: Optical Design of the Prime System
4.1. Specifications for Underwater Optical Systems
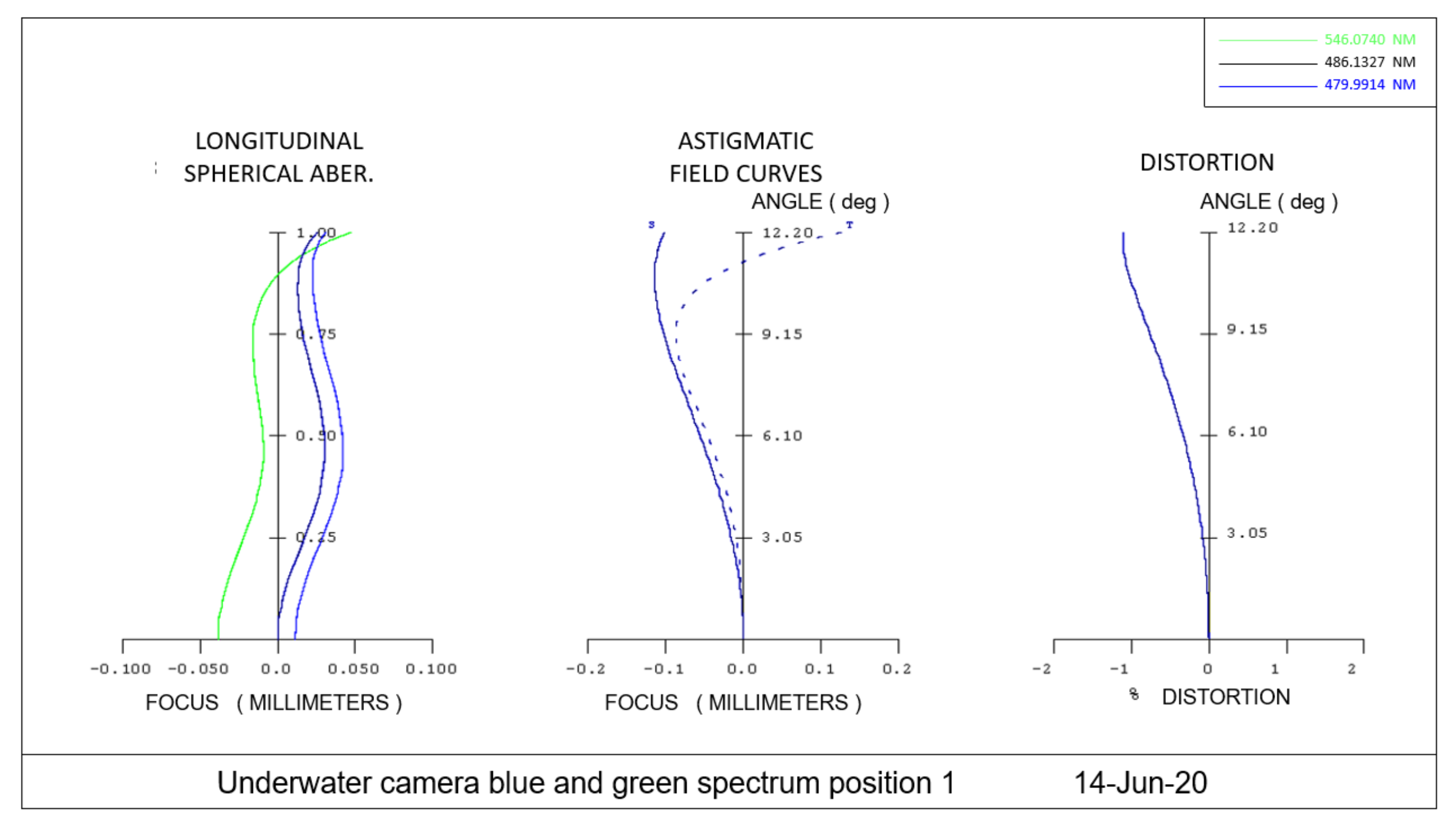
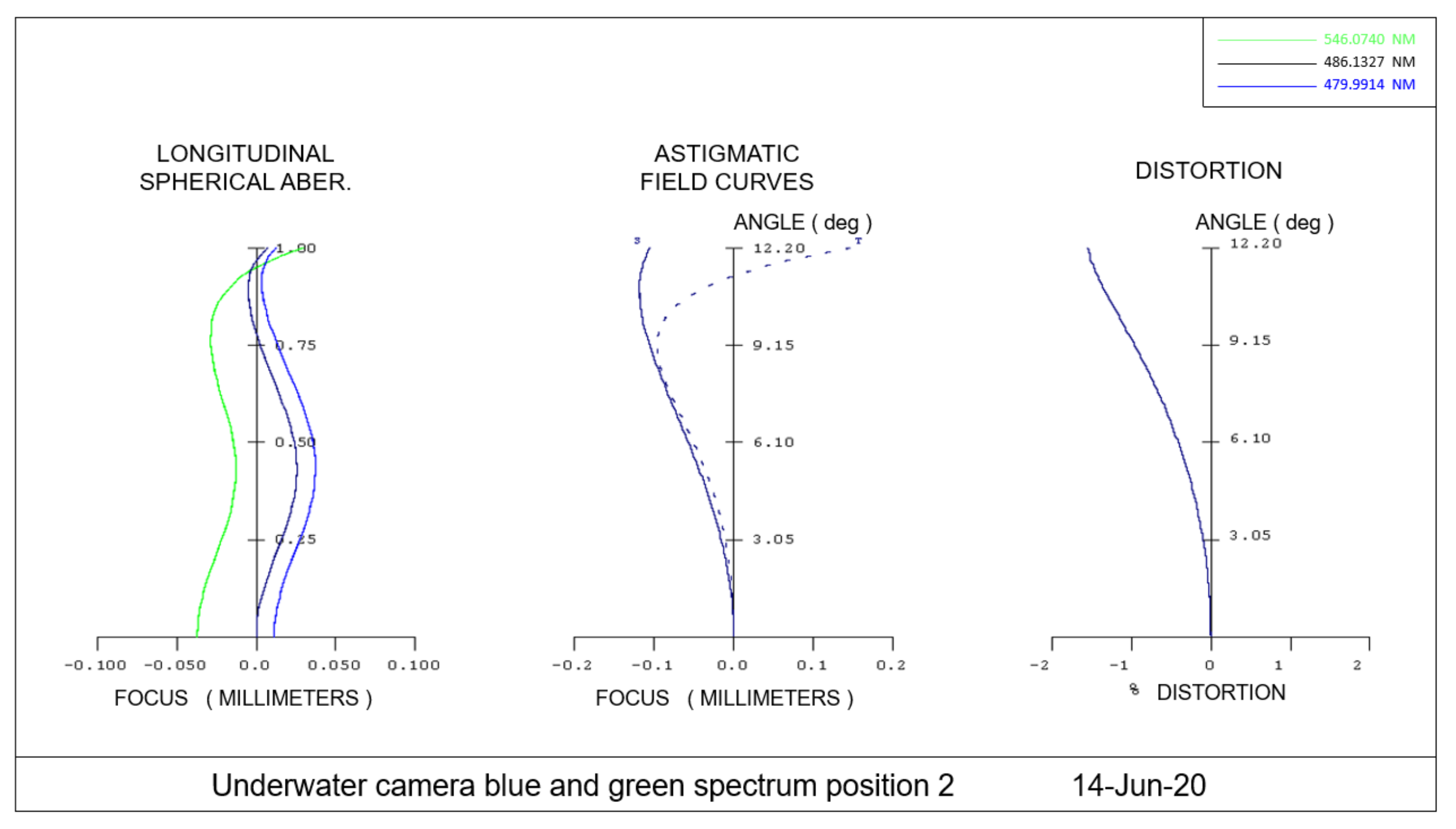
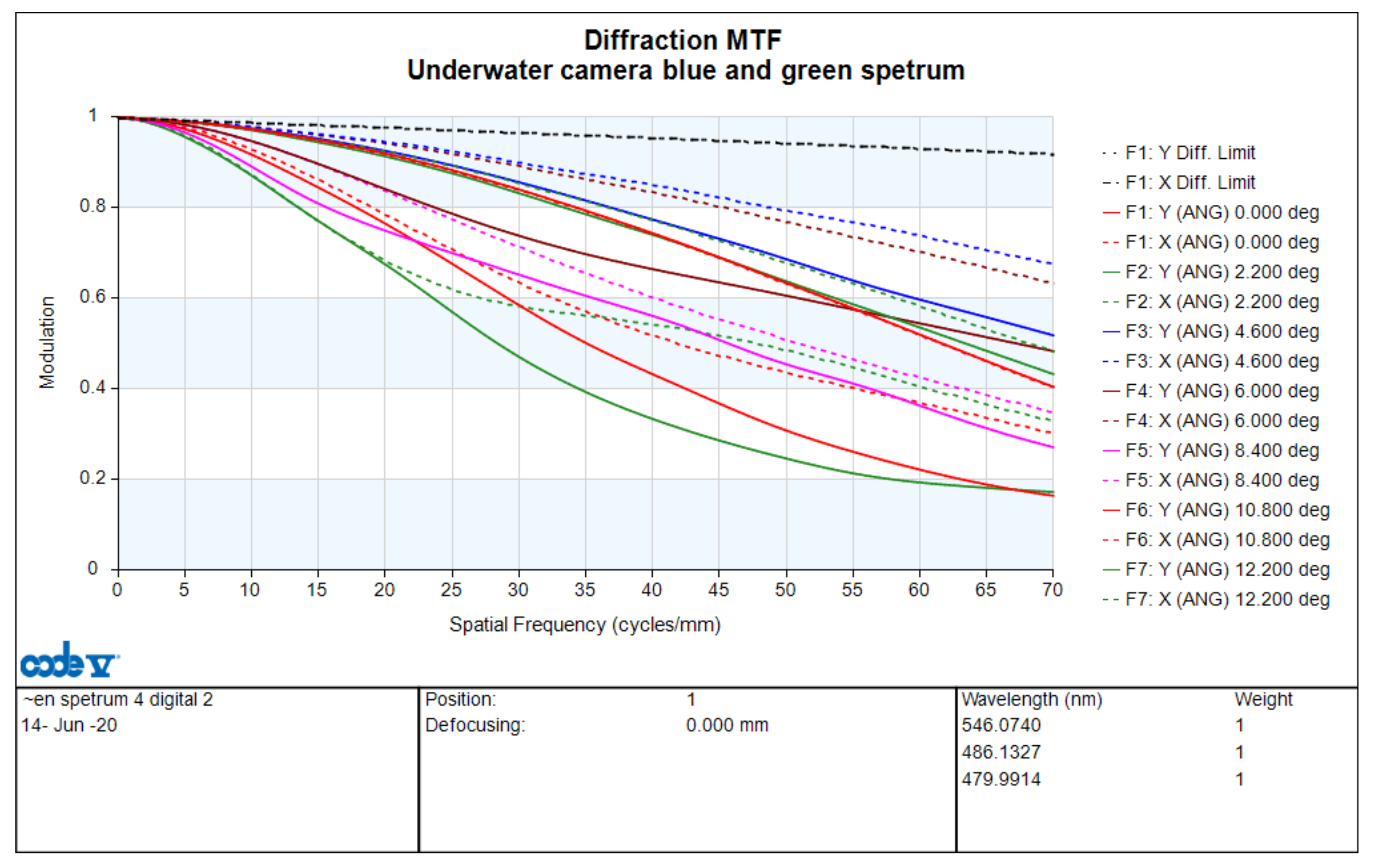
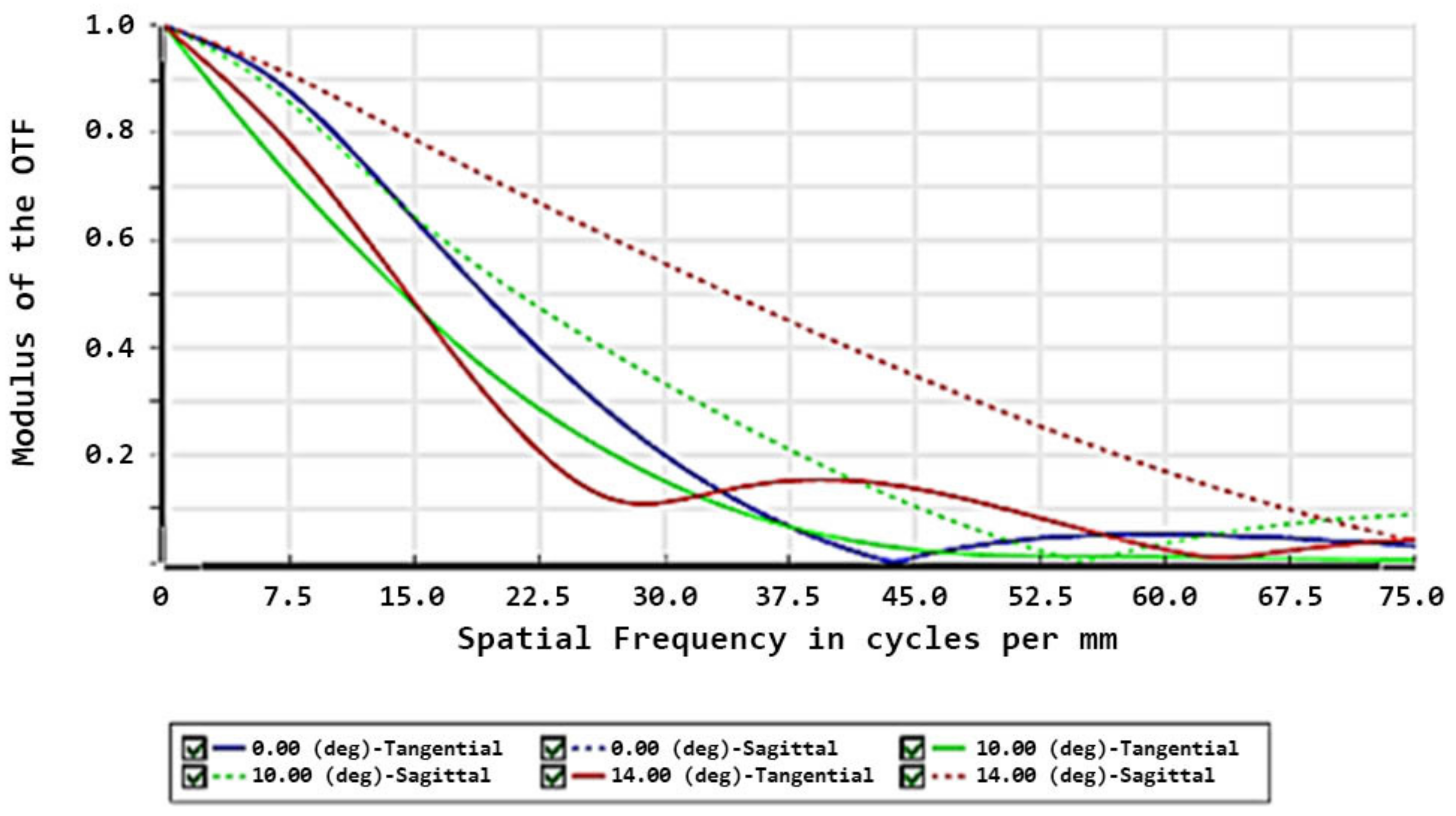
4.2. Design and Verification of the Underwater Optical Camera
5. Introduction to Genetic Algorithm and Its Extended Optimization Specific for Chromatic Aberration for Photogrammetry
6. Methodology for Extended Optimization of Zoom Optics with Genetic Algorithm Specific for Chromatic Aberration
7. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- McNeil, G.T. Metrical Fundamentals of Underwater Lens System. Opt. Eng. 1977, 16, 128–139. [Google Scholar] [CrossRef]
- Mouri, M. Underwater Wide Angle Lens. U.S. Patent No. 5,579,169, 26 November 1996. [Google Scholar]
- Łuczyński, T.; Andreas, B. Underwater image haze removal and color correction with an underwater-ready dark channel prior. arXiv 2018, arXiv:1807.04169. [Google Scholar]
- Shortis, M. Calibration techniques for accurate measurements by underwater camera systems. Sensors 2015, 15, 30810–30826. [Google Scholar] [CrossRef] [Green Version]
- Jaffe, J.S. Computer modeling and the design of optimal underwater imaging systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- Łuczyński, T.; Pfingsthorn, M.; Birk, A. The pinax-model for accurate and efficient refraction correction of underwater cameras in flat-pane housings. Ocean. Eng. 2017, 133, 9–22. [Google Scholar] [CrossRef]
- Hopkins, R.E.; Edgerton, H.E. Lenses for underwater photography. Deep Sea Res. 1961, 8, 312–317. [Google Scholar] [CrossRef]
- Sato, Y.; Mizutani, K.; Wakatsuki, N.; Nakamura, T. Design for aplanatic Fresnel acoustic lens for underwater imaging. Jpn. J. Appl. Phys. 2009, 48, 07GL04. [Google Scholar] [CrossRef]
- Menna, F.; Nocerino, E.; Fassi, F.; Remondino, F. Geometric and optic characterization of a hemispherical dome port for underwater photogrammetry. Sensors 2016, 16, 48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yamashita, A.; Fujii, M.; Kaneko, T. Color Registration of Underwater Images for Underwater Sensing with Consideration of Light Attenuation. In Proceedings of the IEEE International Conference, Roma, Italy, 10–14 April 2007; pp. 4570–4575. [Google Scholar]
- Keyler, T.D.; Hrabik, T.R.; Mensinger, A.F.; Rogers, L.S.; Gorman, O.T. Effect of light intensity and substrate type on siscowet lake trout (Salvelinus namaycush siscowet) predation on deepwater sculpin (Myoxocephalus thompsonii). Hydrobiologia 2019, 840, 77–88. [Google Scholar] [CrossRef]
- Chen, C.H. Primary aberration changes produced by arbitrary movements of paraxial rays. J. Mod. Opt. 2008, 55, 105–126. [Google Scholar] [CrossRef]
- Smith, W.J. Modern Optical Engineering, 4th ed.; SPIE Press: Bellingham, WA, USA; McGraw-Hill: New York, NY, USA, 2008; pp. 59–61. [Google Scholar]
- Tsai, C.M.; Fang, Y.C.; Lin, C.T. Application of genetic algorithm on optimization of laser beam shaping. Opt. Express 2015, 23, 15877–15887. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tsai, C.M. Suppression of Petzval Aberration in a Projector Lens by Using Genetic Algorithm. J. Disp. Technol. 2014, 10, 380–387. [Google Scholar] [CrossRef]
- Gen, M.; Cheng, R. Genetic Algorithms and Engineering Design; John Wiley & Sons: Hoboken, NJ, USA, 1997. [Google Scholar]
- Fang, Y.C.; Tsai, C.M.; Chung, C.L. A study of optical design and optimization of zoom optics with liquid lenses through modified genetic algorithm. Opt. Express 2011, 19, 16291–16302. [Google Scholar] [CrossRef] [PubMed]
- Fang, Y.C.; Liu, T.K.; Tsai, C.M.; Chou, J.H.; Lin, H.C.; Lin, W.T. Extended optimization of chromatic aberrations via a hybrid Taguchi–genetic algorithm for zoom optics with a diffractive optical element. J. Opt. A Pure Appl. Opt. 2009, 11, 045706. [Google Scholar] [CrossRef]
- Fang, Y.C.; Tsai, C.M.; MacDonald, J.; Pai, Y.C. Eliminating Chromatic Aberration in Gauss type Lens Design Using a Novel Genetic Algorithm. Appl. Opt. 2007, 16, 2401–2410. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.H.; Fang, Y.C.; Hsueh, B.R.; MacDonald, J. Study of extended optimization for U-type 2X zoom optics with free-form surface. Opt. Lasers Eng. 2010, 48, 368–379. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Press, Chapter 2 Ocean optics, P.R.C. | |||
|---|---|---|---|
| Wavelength (nm) | Refractive Index | Wavelength (nm) | Refractive Index |
| 250 | 1.3773 | 486 | 1.3371 |
| 308 | 1.3569 | 589 | 1.3330 |
| 359 | 1.3480 | 768 | 1.3289 |
| 400 | 1.3433 | 1000 | 1.3247 |
| 434 | 1.3403 | 1250 | 1.3210 |
| Salinity (‰, ppt) | Temperature (°C) | |||
|---|---|---|---|---|
| 0 | 10 | 20 | 30 | |
| 0 | 1.33400 | 1.33369 | 1.33298 | 1.33194 |
| 5 | 1.33498 | 1.33463 | 1.33390 | 1.33284 |
| 10 | 1.33597 | 1.33557 | 1.33482 | 1.33374 |
| 15 | 1.33595 | 1.33652 | 1.33573 | 1.33464 |
| 20 | 1.33793 | 1.33746 | 1.33665 | 1.33554 |
| 25 | 1.33892 | 1.33840 | 1.33757 | 1.33644 |
| 30 | 1.33990 | 1.33934 | 1.33849 | 1.33734 |
| 35 | 1.34088 | 1.34028 | 1.33940 | 1.33824 |
| 40 | 1.34186 | 1.34123 | 1.34032 | 1.33914 |
| Resolution | 4800 × 3600 (1700 K) |
| Sensor size | 36 mm × 24 mm (CMOS) |
| Diagonal length | 43.2 mm |
| Actual image height | 21.6 mm |
| Object distance | Infinity |
| Spatial cutoff frequency | 70 lp/mm |
| Half-angle of view | 12.20° |
| Focal length | 75 mm |
| Aperture | f/2 |
| Half-Angle of View | Weight |
|---|---|
| 0° | 3 |
| 2.2° | 3 |
| 4.5° | 2 |
| 6.0° | 2 |
| 8.4° | 2 |
| 10.8° | 1 |
| 12.2° | 1 |
| Wavelength | Weight |
|---|---|
| 546.1 nm () | 1 |
| 486.1 nm () | 1 |
| 479.9 nm () | 1 |
| Resolving power | 2100 K pixels |
| Sensor size | 12.8 mm × 9.6 mm (CMOS) |
| Diagonal length | 14.6 mm |
| Actual image height | 7.3 mm |
| Object distance | Infinity |
| Spatial cutoff frequency | 70 lp/mm |
| Angle of view | 72.20° |
| Focal length | 5 mm to 15 mm 3x |
| Aperture | f/2.8 to f4.5 |
| Angle of View | Weight |
|---|---|
| 0° | 3 |
| 4.6° | 3 |
| 9.1° | 2 |
| 18.2° | 2 |
| 27.3° | 2 |
| 36.7° | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chou, C.-F.; Tsai, C.-M.; Chen, C.-H.; Wong, Y.-H.; Fang, Y.-C.; Wen, C.-C.; Lee, H.-Y.; Le, H.-T.; Chang, S.-H.; Liao, H.-Y. Optical Design and Optimization with Genetic Algorithm for High-Resolution Optics Applied to Underwater Remote-Sensing. Appl. Sci. 2021, 11, 10200. https://doi.org/10.3390/app112110200
Chou C-F, Tsai C-M, Chen C-H, Wong Y-H, Fang Y-C, Wen C-C, Lee H-Y, Le H-T, Chang S-H, Liao H-Y. Optical Design and Optimization with Genetic Algorithm for High-Resolution Optics Applied to Underwater Remote-Sensing. Applied Sciences. 2021; 11(21):10200. https://doi.org/10.3390/app112110200
Chicago/Turabian StyleChou, Chun-Feng, Cheng-Mu Tsai, Chao-Hsien Chen, Yung-Hao Wong, Yi-Chin Fang, Chan-Chuan Wen, Hsiao-Yi Lee, Hien-Thanh Le, Shun-Hsyung Chang, and Hsing-Yuan Liao. 2021. "Optical Design and Optimization with Genetic Algorithm for High-Resolution Optics Applied to Underwater Remote-Sensing" Applied Sciences 11, no. 21: 10200. https://doi.org/10.3390/app112110200
APA StyleChou, C. -F., Tsai, C. -M., Chen, C. -H., Wong, Y. -H., Fang, Y. -C., Wen, C. -C., Lee, H. -Y., Le, H. -T., Chang, S. -H., & Liao, H. -Y. (2021). Optical Design and Optimization with Genetic Algorithm for High-Resolution Optics Applied to Underwater Remote-Sensing. Applied Sciences, 11(21), 10200. https://doi.org/10.3390/app112110200