
Mathematical Analysis of Non-Isothermal Reaction–Diffusion Models Arising in Spherical Catalyst and Spherical Biocatalyst


 , and
, and 
Abstract
:1. Introduction
1.1. Spherical Catalyst Model
1.2. Mathematical Model of the Spherical Biocatalyst Equation
2. Preliminaries
3. Outline of the Proposed and Used Method
3.1. The Spherical Catalyst Equation
3.2. The Spherical Biocatalyst Equation
4. Convergence Analysis
5. Error Estimation
6. Numerical Simulations and Discussion
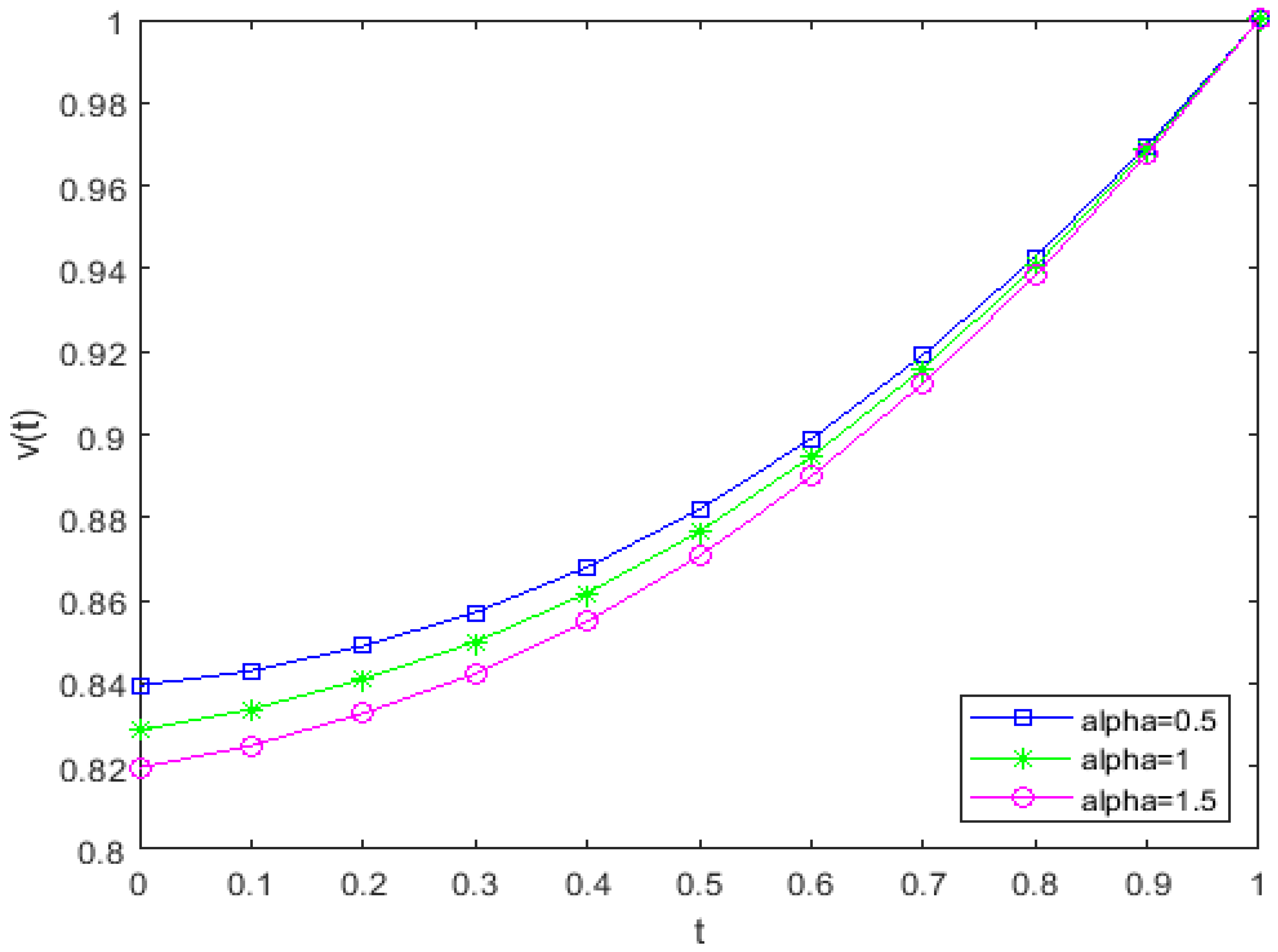
6.1. Results for the Spherical Catalyst Model
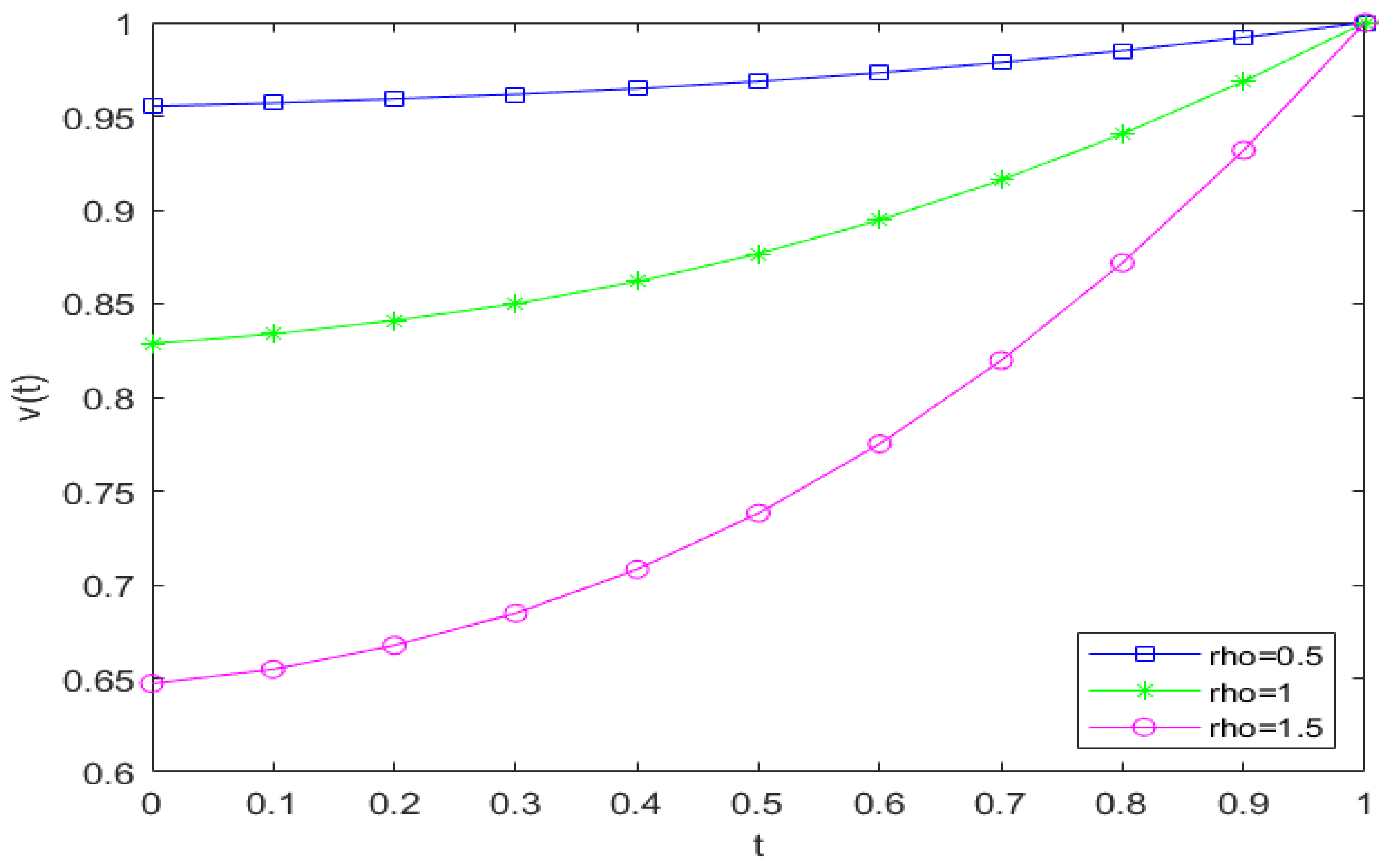
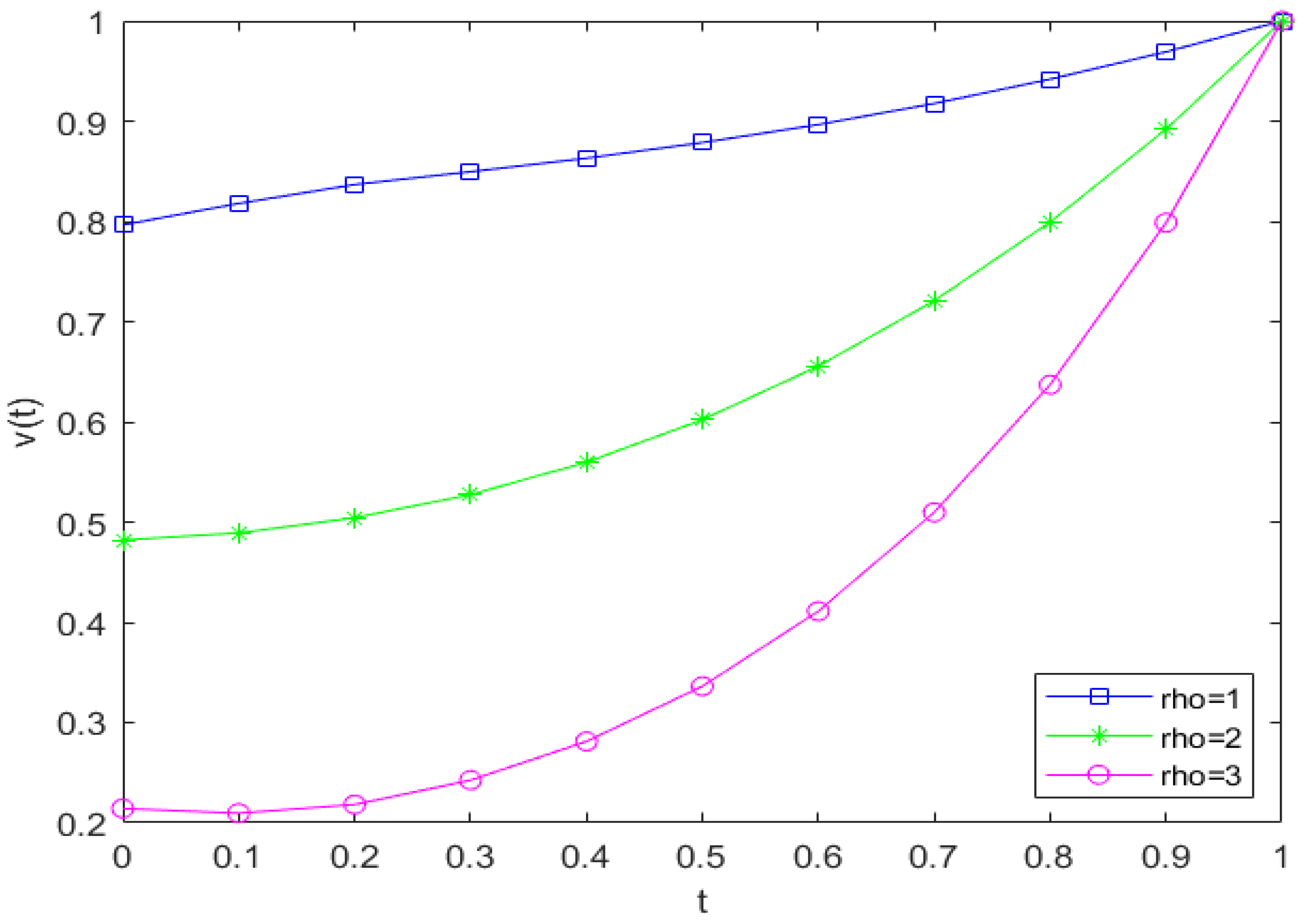
6.2. Results for the Spherical Biocatalyst Model
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Notations and Abbreviations
| Concentration inside the pellet | |
| Concentration at the surface of pellet | |
| Effective diffusivity | |
| Activation energy | |
| Heat of reaction | |
| Inside effective thermal conductivity | |
| Reference reaction constant | |
| Radial distance | |
| Universal gas constant | |
| Arrhenius reaction rate | |
| Spherical catalytic pellet radius | |
| Temperature at the surface | |
| Temperature inside the pellet. | |
| Radial-direction dimensionless concentration | |
| Dimensionless distance | |
| Dimensionless heat of reaction | |
| Dimensionless activation energy | |
| Effectiveness factor | |
| Thiele modulus |
References
- Davis, H.T. Introduction to No nlinear Differential and Integral Equations; Dover Publications: New York, NY, USA, 1962. [Google Scholar]
- Lane, J.H. On theoretical temperature of the sun under the hypothesis of a gaseous mass maintaining its internal heat and depending on the laws of gases known to terrestrial experiment. Am. J. Sci. Arts 1870, 50, 57–74. [Google Scholar] [CrossRef]
- Van Gorder, R.A. Exact first integrals for a Lane–Emden equation of the second kind modeling a thermal explosion in a rectangular slab. New Astron. 2011, 16, 492–497. [Google Scholar] [CrossRef]
- Singh, H. An efficient computational method for the approximate solution of nonlinear Lane-Emden type equations arising in astrophysics. Astrophys. Space Sci. 2018, 363, 363–371. [Google Scholar] [CrossRef]
- Rach, R.; Duan, J.-S.; Wazwaz, A.-M. On the Solution of Non-Isothermal Reaction-Diffusion Model Equations in a Spherical Catalyst by the Modified Adomian Method. Chem. Eng. Commun. 2015, 202, 1081–1088. [Google Scholar] [CrossRef]
- Singh, H.; Srivastava, H.M.; Kumar, D. A reliable algorithm for the approximate solution of the nonlinear Lane-Emden type equations arising in astrophysics. Numer. Methods Partial Differ. Equ. 2014, 34, 1524–1555. [Google Scholar] [CrossRef]
- Chandrasekhar, S. Introduction to the Study of Stellar Structure; Dover Publications: New York, NY, USA, 1967. [Google Scholar]
- Horedt, G.M. Polytropes: Applications in Astrophysics and Related Fields; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2004. [Google Scholar]
- Duan, J.-S.; Rach, R.; Wazwaz, A.M. Steady-state concentrations of carbon dioxide absorbed into phenylglycidyl ether solutions by the Adomian decomposition method. J. Math. Chem. 2015, 53, 1054–1067. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The variational iteration method for solving new fourth-order Emden–Fowler type equations. Chem. Eng. Commun. 2015, 202, 1425–1437. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Solving systems of fourth-order Emden–Fowler type equations by the variational iteration method. Chem. Eng. Commun. 2016, 203, 1081–1092. [Google Scholar] [CrossRef]
- Rach, R.; Duan, J.-S.; Wazwaz, A.M. Solving coupled Lane–Emden boundary value problems in catalytic diffusion reactions by the Adomian decomposition method. J. Math. Chem. 2014, 52, 255–267. [Google Scholar] [CrossRef]
- Saadatmandi, A.; Nafar, N.; Toufighi, S.P. Numerical study on the reaction cum diffusion process in a spherical biocatalyst. Iran. J. Math. Chem. 2014, 5, 47–61. [Google Scholar]
- Sevukaperumal, S.; Rajendran, L. Analytical solution of the concentration of species using modified Adomian decomposition method. Int. J. Math. Arch. 2013, 4, 107–117. [Google Scholar]
- Danish, M.; Kumar, S.; Kumar, S. OHAM solution of a singular BVP of reaction cum diffusion in a biocatalyst. Int. J. Appl. Math. 2011, 41, 223–227. [Google Scholar]
- Wazwaz, A.M. Solving the non-isothermal reaction-diffusion model equations in a spherical catalyst by the variational iteration method. Chem. Phys. Lett. 2017, 679, 132–136. [Google Scholar] [CrossRef]
- Singh, R. Optimal homotopy analysis method for the non-isothermal reaction–diffusion model equations in a spherical catalyst. J. Math. Chem. 2018, 56, 2579–2590. [Google Scholar] [CrossRef]
- Li, X.-M.; Chen, X.-D.; Chen, N.-X. A third-order approximate solution of the reaction diffusion process in an immobilized biocatalyst particle. Biochem. Eng. J. 2014, 17, 65–69. [Google Scholar] [CrossRef]
- Singh, H. A new numerical algorithm for fractional model of Bloch equation in nuclear magnetic resonance. Alex. Eng. J. 2016, 55, 2863–2869. [Google Scholar] [CrossRef] [Green Version]
- Singh, H. Operational matrix approach for approximate solution of fractional model of Bloch equation. J. King Saud Univ. Sci. 2017, 29, 235–240. [Google Scholar] [CrossRef]
- Petráš, I. Modeling and numerical analysis of fractional-order Bloch equations. Comput. Math. Appl. 2011, 61, 341–356. [Google Scholar] [CrossRef]
- Ahmadian, A.; Chan, C.S.; Salahshour, S.; Vaitheeswaran, V. FTFBE: A numerical approximation for fuzzy time-fractional Bloch equation. In Proceedings of the International Conference on Fuzzy systems (FUZZ-IEEE), World Congress on Computational Intelligence, Beijing, China, 6–11 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 418–423. [Google Scholar]
- Wu, J.-L. A wavelet operational method for solving fractional partial differential equations numerically. Appl. Math. Comput. 2009, 214, 31–40. [Google Scholar] [CrossRef]
- Singh, H.; Srivastava, H.M.; Kumar, D. A reliable numerical algorithm for the fractional vibration equation. Chaos Solitons Fractals 2017, 103, 131–138. [Google Scholar] [CrossRef]
- Tohidi, E.; Bhrawy, A.H.; Erfani, K. A collocation method based on Bernoulli operational matrix for numerical solution of generalized pantograph equation. Appl. Math. Model. 2013, 37, 4283–4294. [Google Scholar] [CrossRef]
- Kazem, S.; Abbasbandy, S.; Kumar, S. Fractional-order Legendre functions for solving fractional-order differential equations. Appl. Math. Model. 2013, 37, 5498–5510. [Google Scholar] [CrossRef]
- Singh, C.S.; Singh, H.; Singh, V.K.; Singh, O.P. Fractional order operational matrix methods for fractional singular integro-differential equation. Appl. Math. Model. 2016, 40, 10705–10718. [Google Scholar] [CrossRef]
- Singh, H.; Srivastava, H.M. Jacobi collocation method for the approximate solution of some fractional-order Riccati differential equations with variable coefficients. Phys. A Stat. Mech. Appl. 2019, 523, 1130–1149. [Google Scholar] [CrossRef]
- Singh, C.S.; Singh, H.; Singh, S.; Kumar, D. An efficient computational method for solving system of nonlinear generalized Abel integral equations arising in astrophysics. Phys. A Stat. Mech. Appl. 2019, 525, 1440–1448. [Google Scholar] [CrossRef]
- Singh, H.; Pandey, R.K.; Baleanu, D. Stable numerical approach for fractional delay differential equations. Few-Body Syst. 2017, 58, 1–18. [Google Scholar] [CrossRef]
- Singh, H.; Singh, C.S. Stable numerical solutions of fractional partial differential equations using Legendre scaling functions operational matrix. Ain Shams Eng. J. 2018, 9, 717–725. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA; London, UK, 1999; Volume 198. [Google Scholar]
- Cattani, C.; Srivastava, H.M.; Yang, X.-J. Fractional Dynamics; Emerging Science Publishers: Berlin, Germany, 2015. [Google Scholar]
- Singh, H.; Srivastava, H.M.; Hammouch, Z.; Nisar, K.S. Numerical simulation and stability analysis for the fractional-order dynamics of COVID-19. Results Phys. 2021, 20, 1–8. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematical Studies; Elsevier (North-Holland) Science Publishers: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Srivastava, H.M. Fractional-order derivatives and integrals: Introductory overview and recent developments. Kyungpook Math. J. 2020, 60, 73–116. [Google Scholar]
- Srivastava, H.M. Some parametric and argument variations of the operators of fractional calculus and related special functions and integral transformations. J. Nonlinear Convex Anal. 2021, 22, 1501–1520. [Google Scholar]
- Srivastava, H.M. An introductory overview of fractional-calculus operators based upon the Fox-Wright and related higher transcendental functions. J. Adv. Eng. Comput. 2021, 5, 135–166. [Google Scholar]
- Povstenko, Y. Linear Fractional Diffusion-Wave Equation for Scientists and Engineers; Birkhäuser: New York, NY, USA, 2015. [Google Scholar]
- Heydari, M.; Hosseini, S.M.; Loghmani, G.B. Numerical solution of singular IVPs of Lane-Emden type using integral operator and radial basis functions. Int. J. Ind. Math. 2011, 4, 135–146. [Google Scholar]
- Nikooeinejad, Z.; Heydari, M. Nash equilibrium approximation of some class of stochastic differential games: A combined Chebyshev spectral collocation method with policy iteration. J. Comput. Appl. Math. 2019, 362, 41–54. [Google Scholar] [CrossRef]
- Nikooeinejad, Z.; Delavarkhalafi, A.; Heydari, M. Application of shifted Jacobi pseudo spectral method for solving (in) finite-horizon min -max optimal control problems with uncertainty. Int. J. Control 2018, 91, 725–739. [Google Scholar] [CrossRef]
- Heydari, M.; Loghmani, G.B.; Hosseini, S.M.; Yildirim, A. A novel hybrid spectral-variational iteration method (H-S-VIM) for solving nonlinear equations arising in heat transfer. Iran. J. Sci. Technol. Trans. A 2013, 37, 501512. [Google Scholar]
- Mason, J.C.; Handscomb, D.C. Chebyshev Polynomials; Chapman and Hall/CRC: Boca Raton, FL, USA, 2003. [Google Scholar]
- Doman, B.G.S. The Classical Orthogonal Polynomials; World Scientific: Singapore, 2016. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Present Method | Method in [16] | Present Method | Method in [16] | Present Method | Method in [16] | |
|---|---|---|---|---|---|---|
| 0.0 | 0.83946 | 0.83946 | 0.82874 | 0.82874 | 0.81965 | 0.81965 |
| 0.1 | 0.84301 | 0.84100 | 0.83376 | 0.83040 | 0.82499 | 0.82143 |
| 0.2 | 0.84901 | 0.84562 | 0.84102 | 0.83539 | 0.83276 | 0.82676 |
| 0.3 | 0.85710 | 0.85336 | 0.84995 | 0.84372 | 0.84231 | 0.83565 |
| 0.4 | 0.86801 | 0.86425 | 0.86171 | 0.85542 | 0.85487 | 0.84813 |
| 0.5 | 0.88193 | 0.87834 | 0.87656 | 0.87055 | 0.87069 | 0.86421 |
| 0.6 | 0.89893 | 0.89572 | 0.89458 | 0.88916 | 0.88980 | 0.88393 |
| 0.7 | 0.91917 | 0.91646 | 0.91591 | 0.91132 | 0.91234 | 0.90732 |
| 0.8 | 0.94270 | 0.94067 | 0.94058 | 0.93711 | 0.93825 | 0.93443 |
| 0.9 | 0.96960 | 0.96847 | 0.96858 | 0.96663 | 0.96747 | 0.96530 |
| 1.0 | 1.00000 | 1.00000 | 1.00000 | 1.00000 | 1.00000 | 1.00000 |
| Present Method | Method in [16] | Present Method | Method in [16] | |
|---|---|---|---|---|
| 0.0 | 0.95541 | 0.95541 | 0.64719 | 0.64719 |
| 0.1 | 0.95708 | 0.95586 | 0.65480 | 0.65039 |
| 0.2 | 0.95924 | 0.95719 | 0.66754 | 0.66003 |
| 0.3 | 0.96164 | 0.95940 | 0.68476 | 0.67623 |
| 0.4 | 0.96473 | 0.96251 | 0.70812 | 0.69918 |
| 0.5 | 0.96858 | 0.96651 | 0.73814 | 0.72918 |
| 0.6 | 0.97322 | 0.97141 | 0.77515 | 0.76657 |
| 0.7 | 0.97868 | 0.97720 | 0.81960 | 0.81179 |
| 0.8 | 0.98496 | 0.98389 | 0.87175 | 0.86535 |
| 0.9 | 0.99206 | 0.99149 | 0.93181 | 0.92786 |
| 1.0 | 1.00000 | 1.00000 | 1.00000 | 1.00000 |
| Present Method | Method in [16] | ||||
|---|---|---|---|---|---|
| 0.8394623 | 0.5 | 1 | 1 | 0.9656645 | 1.003207 |
| 0.8287498 | 1.0 | 1 1 | 1 0 | 0.9943650 | 1.059701 |
| 0.8196580 | 1.5 | 1 | 1 | 1.0253210 | 1.098859 |
| 0.9554170 | 1 | 0.5 | 1 | 1.0041781 | 1.075815 |
| 0.8287498 | 1 | 1.0 | 1 | 0.9943650 | 1.059701 |
| 0.6471921 | 1 | 1.5 | 1 | 0.9637729 | 1.029147 |
| Time (s) | |
|---|---|
| 4 | 8.201 |
| 7 | 18.034 |
| 10 | 60.819 |
| Present Method | Method in [16] | Present Method | Method in [16] | Present Method | Method in [16] | |
|---|---|---|---|---|---|---|
| 0.0 | 0.79644 | 0.79644 | 0.48206 | 0.48206 | 0.21426 | 0.21426 |
| 0.1 | 0.83673 | 0.80322 | 0.50437 | 0.49965 | 0.21819 | 0.23594 |
| 0.2 | 0.86367 | 0.80322 | 0.50437 | 0.49965 | 0.21819 | 0.23594 |
| 0.3 | 0.84955 | 0.81262 | 0.52743 | 0.52202 | 0.24253 | 0.26447 |
| 0.4 | 0.86303 | 0.82544 | 0.55976 | 0.55404 | 0.28121 | 0.30696 |
| 0.5 | 0.87859 | 0.84227 | 0.60219 | 0.59640 | 0.33626 | 0.36575 |
| 0.6 | 0.89653 | 0.86338 | 0.65556 | 0.64999 | 0.41109 | 0.44360 |
| 0.7 | 0.91761 | 0.88914 | 0.72092 | 0.71586 | 0.50969 | 0.54338 |
| 0.8 | 0.94184 | 0.92005 | 0.79932 | 0.79522 | 0.63704 | 0.66792 |
| 0.9 | 0.96914 | 0.95674 | 0.89191 | 0.88944 | 0.79866 | 0.81958 |
| 1.0 | 1.00000 | 1.00000 | 1.00000 | 1.00000 | 1.00000 | 1.00000 |
| Present Method | Method in [16] | |||
|---|---|---|---|---|
| 0.7964472 | 1 | 1 | 0.9848465 | 1.4057760 |
| 0.4820697 | 2 | 1 | 0.9468011 | 0.8943578 |
| 0.2142606 | 3 | 1 | 0.7432604 | 0.6501860 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tripathi, V.M.; Srivastava, H.M.; Singh, H.; Swarup, C.; Aggarwal, S. Mathematical Analysis of Non-Isothermal Reaction–Diffusion Models Arising in Spherical Catalyst and Spherical Biocatalyst. Appl. Sci. 2021, 11, 10423. https://doi.org/10.3390/app112110423
Tripathi VM, Srivastava HM, Singh H, Swarup C, Aggarwal S. Mathematical Analysis of Non-Isothermal Reaction–Diffusion Models Arising in Spherical Catalyst and Spherical Biocatalyst. Applied Sciences. 2021; 11(21):10423. https://doi.org/10.3390/app112110423
Chicago/Turabian StyleTripathi, Vivek Mani, Hari Mohan Srivastava, Harendra Singh, Chetan Swarup, and Sudhanshu Aggarwal. 2021. "Mathematical Analysis of Non-Isothermal Reaction–Diffusion Models Arising in Spherical Catalyst and Spherical Biocatalyst" Applied Sciences 11, no. 21: 10423. https://doi.org/10.3390/app112110423
APA StyleTripathi, V. M., Srivastava, H. M., Singh, H., Swarup, C., & Aggarwal, S. (2021). Mathematical Analysis of Non-Isothermal Reaction–Diffusion Models Arising in Spherical Catalyst and Spherical Biocatalyst. Applied Sciences, 11(21), 10423. https://doi.org/10.3390/app112110423