
Response Analysis of the Tristable Energy Harvester with an Uncertain Parameter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
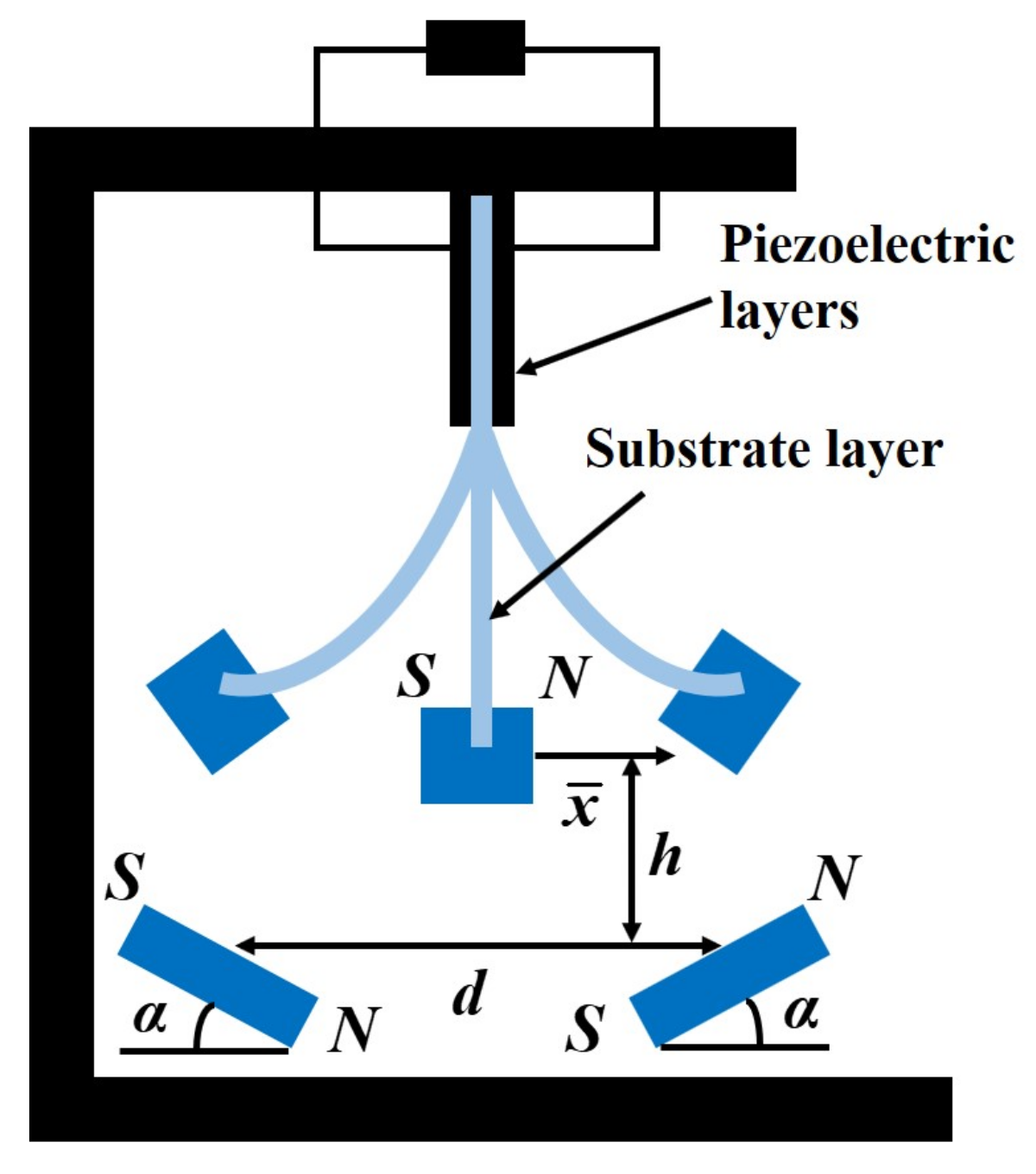
2. The Tristable Energy Harvester
3. The Approximation of the TEH with an Uncertain Parameter
3.1. Chebyshev Polynomial Approximation
3.2. Equivalent Deterministic System
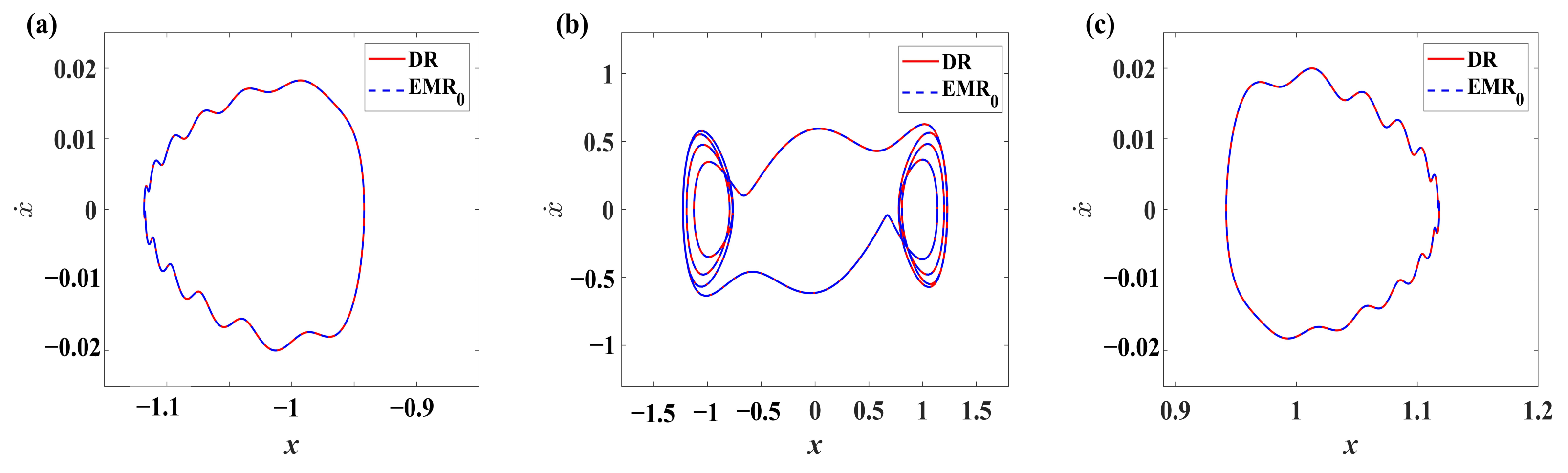
3.3. Validation
4. Parametric Uncertainty Analysis
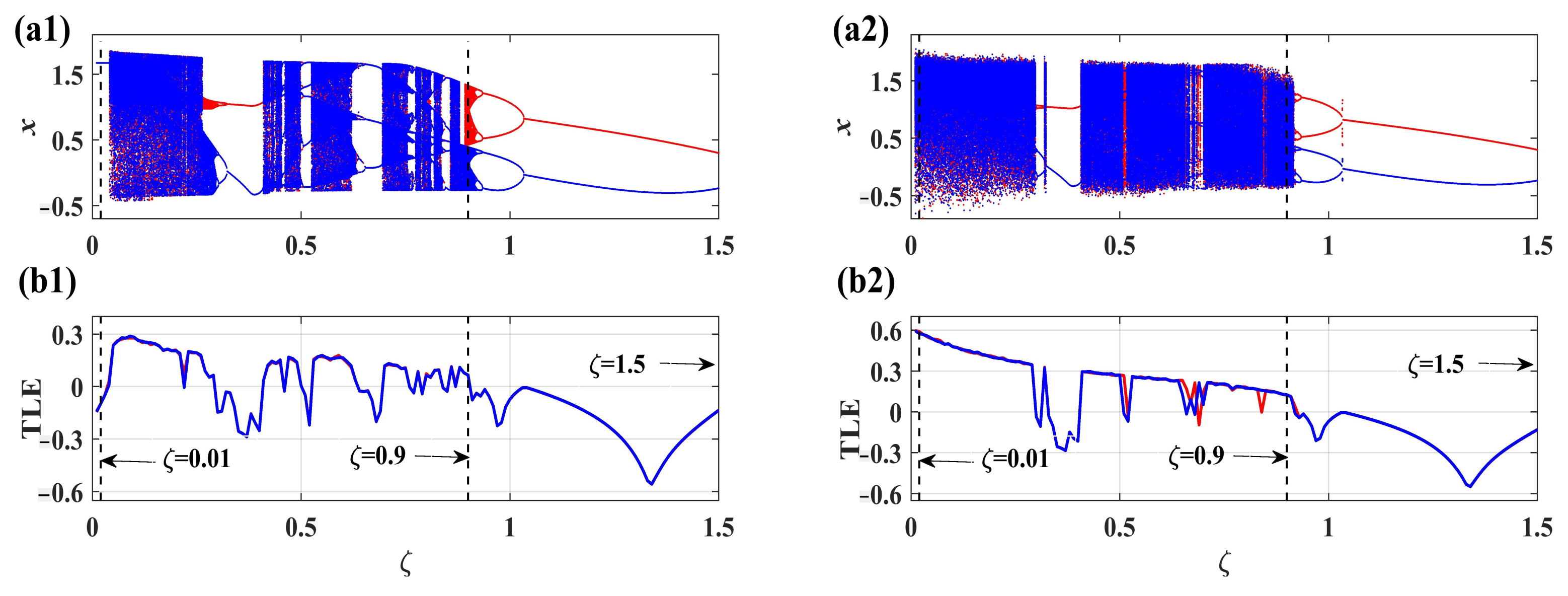
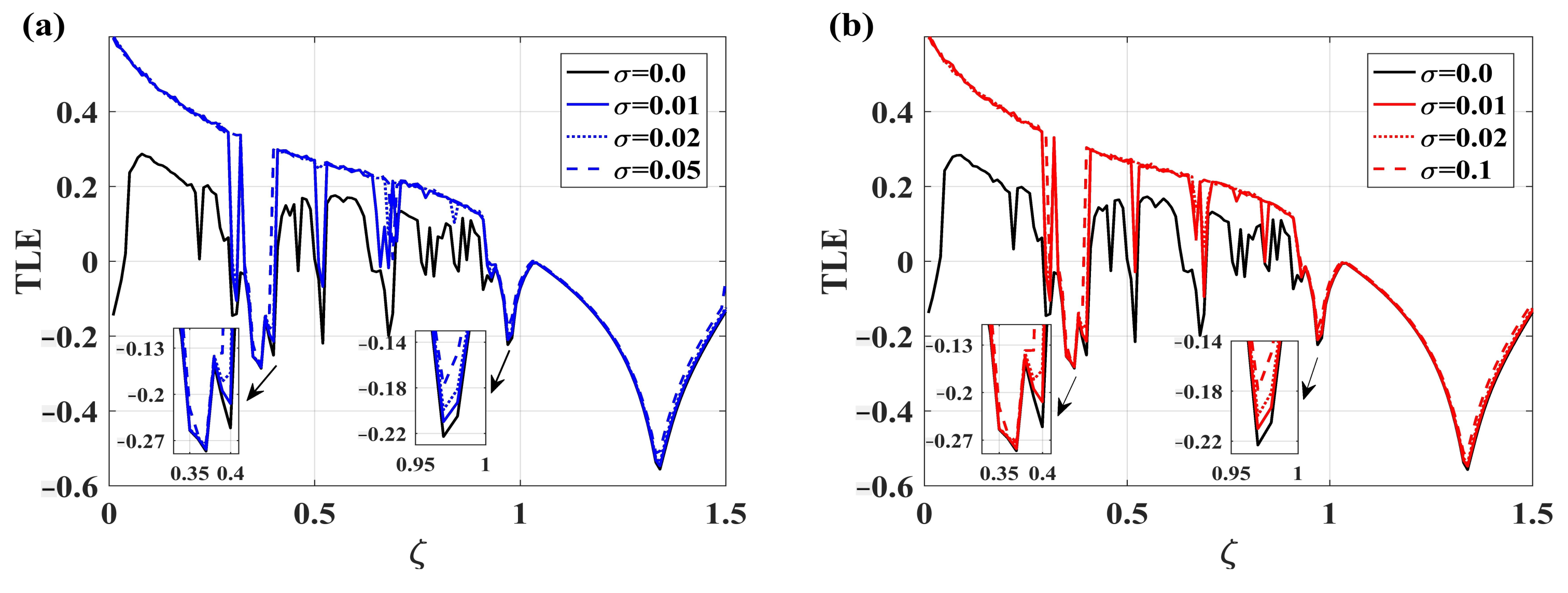
4.1. Influence of the Damping Coefficient
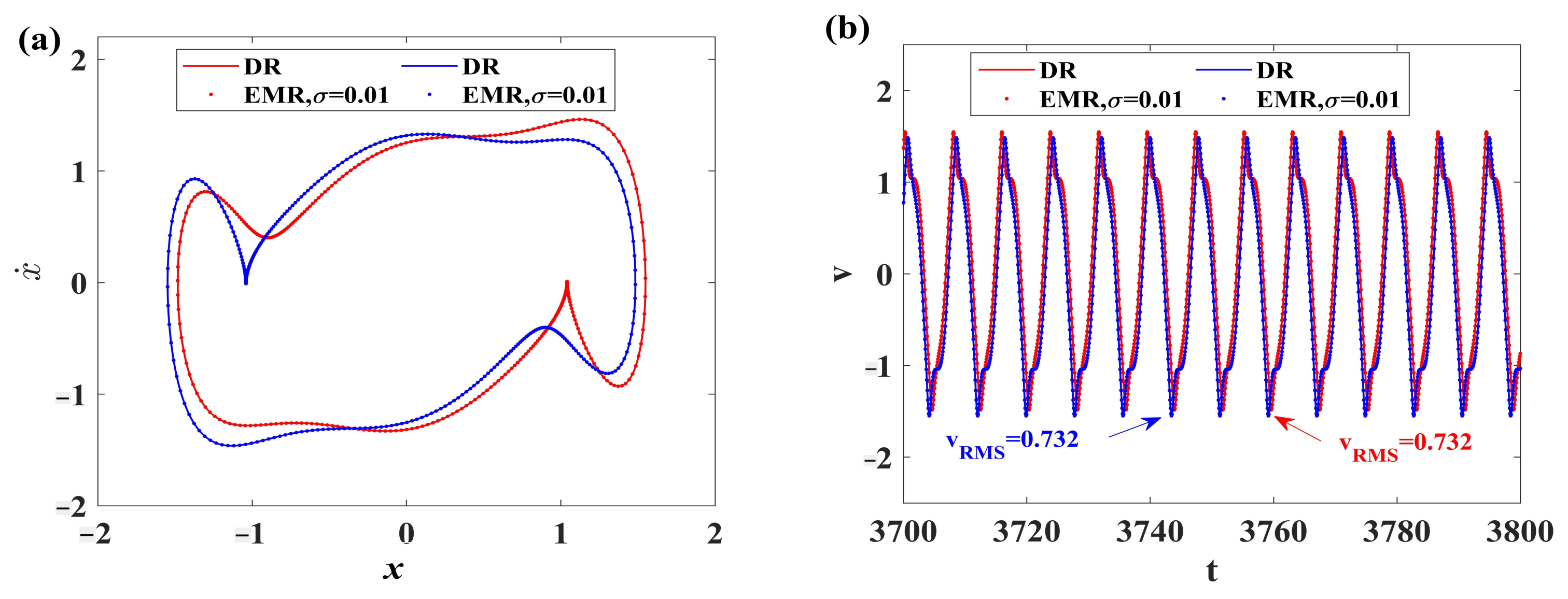
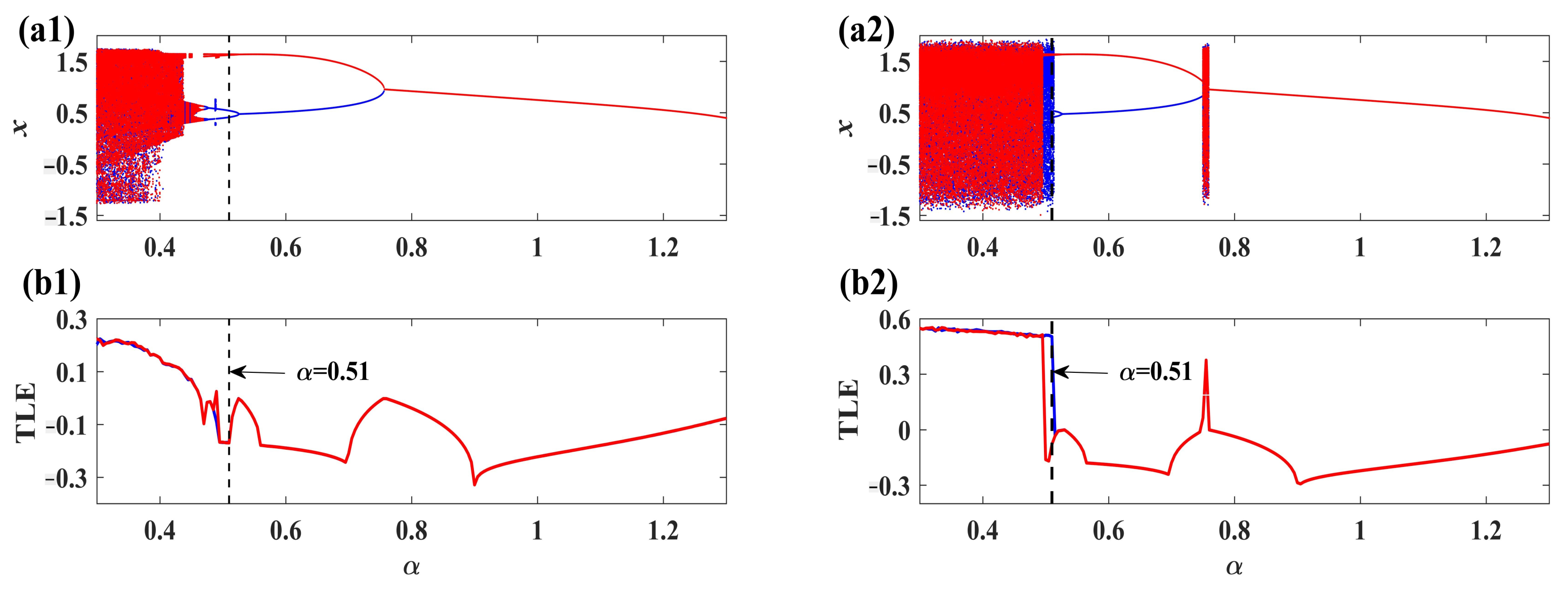
4.2. Influence of the Electromechanical Coupling Coefficient
4.3. Combined Influence of the Damping Coefficient and Electromechanical Coupling Coefficient
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| TEH | tristable energy harvester |
| TLE | top Lyapunov exponent |
| RMS | root mean square |
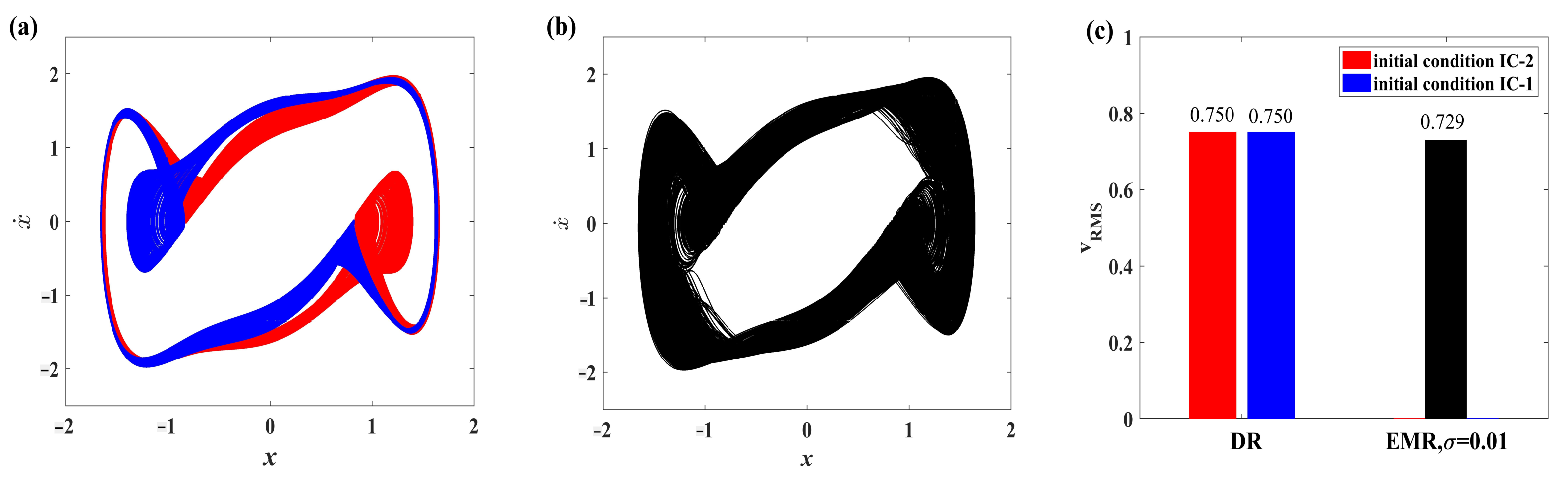
| DR | deterministic response of the deterministic system |
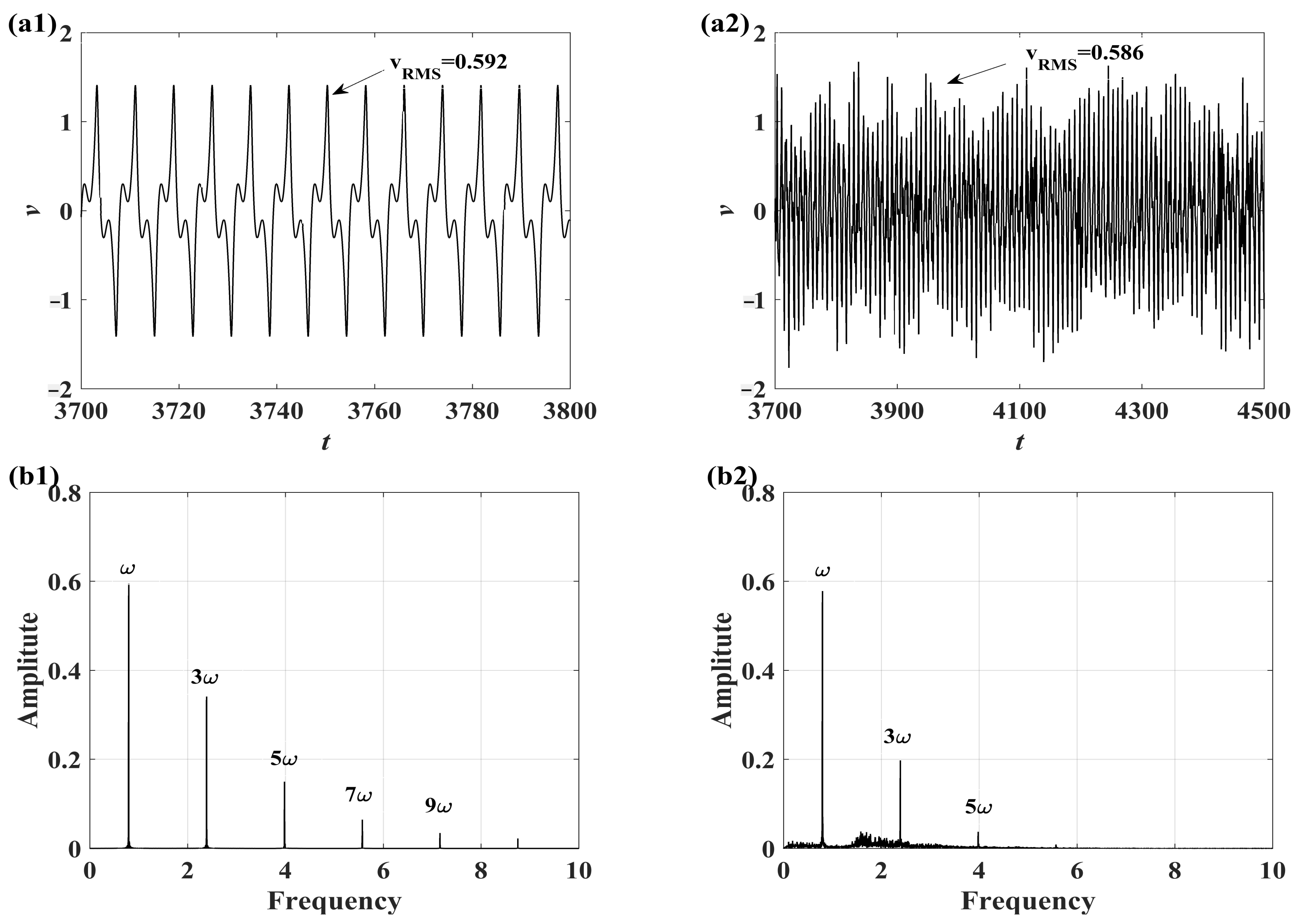
| EMR | ensemble mean response of the high-dimensional equivalent system |
References
- Beeby, S.P.; Tudor, M.J.; White, N.M. Energy harvesting vibration sources for microsystems applications. Meas. Sci. Technol. 2006, 17, R175. [Google Scholar] [CrossRef]
- Erturk, A.; Hoffmann, J.; Inman, D.J. A piezomagnetoelastic structure for broadband vibration energy harvesting. Appl. Phys. Lett. 2009, 94, 254102. [Google Scholar] [CrossRef]
- Akaydin, H.D.; Elvin, N.; Andreopoulos, Y. Energy harvesting from highly unsteady fluid flows using piezoelectric materials. J. Intell. Mater. Syst. Struct. 2010, 21, 1263–1278. [Google Scholar] [CrossRef]
- Cottone, F.; Vocca, H.; Gammaitoni, L. Nonlinear energy harvesting. Phys. Rev. Lett. 2012, 102, 080601. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erturk, A.; Inman, D.J. Piezoelectric Energy Harvesting; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Beeby, S.P.; Torah, R.N.; Tudor, M.J.; Glynne-Jones, P.; O’Donnell, T.; Saha, C.R.; Roy, S. A micro electromagnetic generator for vibration energy harvesting. J. Micromech. Microeng. 2007, 17, 1257–1265. [Google Scholar] [CrossRef]
- Duan, X.J.; Cao, D.X.; Li, X.G.; Shen, Y.J. Design and dynamic analysis of integrated architecture for vibration energy harvesting including piezoelectric frame and mechanical amplifier. Appl. Math. Mech. Ed. 2021, 42, 755–770. [Google Scholar] [CrossRef]
- Lu, Z.Q.; Li, K.; Ding, H.; Chen, L.Q. Nonlinear energy harvesting based on a modified snap-through mechanism. Appl. Math. Mech. Ed. 2019, 40, 167–180. [Google Scholar] [CrossRef]
- Mcinnes, C.R.; Gorman, D.G.; Cartmell, M.P. Enhanced vibrational energy harvesting using nonlinear stochastic resonance. J. Sound Vib. 2008, 318, 655–662. [Google Scholar] [CrossRef] [Green Version]
- Jin, Y.F.; Xiao, S.M.; Zhang, Y.X. Enhancement of tristable energy harvesting using stochastic resonance. J. Stat. Mech. Theory Exp. 2018, 2018, 123211. [Google Scholar] [CrossRef]
- Zhang, W.; Yao, Z.G.; Yao, M.H. Periodic and chaotic dynamics of composite laminated piezoelectric rectangular plate with one-to-two internal resonance. Sci. China Ser. E 2009, 52, 731–742. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, Z.R.; Duan, X.X.; Xu, Y. Stochastic dynamics of a piezoelectric energy harvester with fractional damping under Gaussian colored noise excitation. Appl. Math. Model. 2021, 97, 268–280. [Google Scholar] [CrossRef]
- Yang, Y.G.; Xu, W. Stochastic analysis of monostable vibration energy harvesters with fractional derivative damping under gaussian white noise excitation. Nonlinear Dyn. 2018, 94, 639–648. [Google Scholar] [CrossRef]
- Mann, B.P.; Sims, N.D. Energy harvesting from the nonlinear oscillations of magnetic levitation. J. Sound Vib. 2009, 319, 515–530. [Google Scholar] [CrossRef] [Green Version]
- Stanton, S.C.; Mcgehee, C.C.; Mann, B.P. Reversible hysteresis for broadband magnetopiezoelastic energy harvesting. Appl. Phys. Lett. 2009, 95, 174103. [Google Scholar] [CrossRef]
- Xu, M.; Jin, X.L.; Wang, Y.; Huang, Z.L. Stochastic averaging for nonlinear vibration energy harvesting system. Nonlinear Dyn. 2014, 78, 1451–1459. [Google Scholar] [CrossRef]
- Jiang, W.A.; Sun, P.; Zhao, G.L.; Chen, L.Q. Path integral solution of vibratory energy harvesting systems. Appl. Math. Mech. (Engl. Ed.) 2019, 40, 579–590. [Google Scholar] [CrossRef]
- Yao, M.H.; Liu, P.F.; Wang, H.B. Nonlinear dynamics and power generation on a new bistable piezoelectric-electromagnetic energy harvester. Complexity 2020, 2020, 5681703. [Google Scholar] [CrossRef]
- Sun, S.; Cao, S.Q. Dynamic modeling and analysis of a bistable piezoelectric cantilever power generation system. Acta Phys. Sin. 2012, 61, 210505. [Google Scholar]
- Liu, D.; Wu, Y.R.; Xu, Y.; Li, J.L. Stochastic response of bistable vibration energy harvesting system subject to filtered gaussian white noise. Mech. Syst. Signal Process. 2019, 130, 201–212. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Li, J.L. Probabilistic response analysis of nonlinear vibration energy harvesting system driven by Gaussian colored noise. Chaos Solitons Fractals 2017, 104, 806–812. [Google Scholar] [CrossRef]
- Ghandchi, T.M.; Elliott, S.J. Extending the dynamic range of an energy harvester using nonlinear damping. J. Sound Vib. 2014, 333, 623–629. [Google Scholar] [CrossRef]
- Zhou, S.X.; Cao, J.Y.; Inman, D.J.; Lin, J.; Liu, S.S.; Wang, Z.Z. Broadband tristable energy harvester: Modeling and experiment verification. Appl. Energy 2014, 133, 33–39. [Google Scholar] [CrossRef]
- Cao, J.Y.; Zhou, S.X.; Wang, W.; Lin, J. Influence of potential well depth on nonlinear tristable energy harvesting. Appl. Phys. Lett. 2015, 106, 515–530. [Google Scholar] [CrossRef]
- Kim, P.; Seok, J. Dynamic and energetic characteristics of a tri-stable magnetopiezoelastic energy harvester. Mech. Mach. Theory 2015, 94, 41–63. [Google Scholar] [CrossRef]
- Li, H.T.; Qin, W.Y.; Lan, C.B.; Deng, W.Z.; Zhou, Z.Y. Dynamics and coherence resonance of tri-stable energy harvesting system. Smart Mater. Struct. 2016, 25, 015001. [Google Scholar]
- Zhang, Y.X.; Jin, Y.F. Colored levy noise induced stochastic dynamics in a tri-stable hybrid energy harvester. J. Comput. Nonlinear Dyn. 2021, 16, 041005. [Google Scholar] [CrossRef]
- Yang, T.; Cao, Q.J. Dynamics and performance evaluation of a novel tristable hybrid energy harvester for ultra-low level vibration resources. Int. J. Mech. Sci. 2019, 156, 123–136. [Google Scholar] [CrossRef]
- Ali, S.F.; Friswell, M.I.; Adhikari, S. Piezoelectric energy harvesting with parametric uncertainty. Smart Mater. Struct. 2010, 19, 105010. [Google Scholar] [CrossRef] [Green Version]
- Nanda, A.; Karami, M.A.; Singla, P. Uncertainty quantification of energy harvesting systems using method of Quadratures and maximum entropy principle. In Smart Material, Adaptive Structures and Intelligent Systems; American Society of Mechanical Engineers: New York, NY, USA, 2015. [Google Scholar]
- Franco, V.R.; Varoto, P.S. Parameter uncertainties in the design and optimization of cantilever piezoelectric energy harvesters. Mech. Syst. Signal Process. 2017, 93, 593–609. [Google Scholar] [CrossRef]
- Yoon, H.; Youn, B.D. System reliability analysis of piezoelectric vibration energy harvesting considering multiple safety events under physical uncertainty. Smart Mater. Struct. 2018, 28, 025010. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Hajj, M.R.; Nayfeh, A.H. Sensitivity analysis of piezoaeroelastic energy harvesters. J. Intell. Mater. Syst. Struct. 2012, 23, 1523–1531. [Google Scholar] [CrossRef]
- Wu, F.; Gao, Q.; Xu, X.M.; Zhong, W.X. A modified computational scheme for the stochastic perturbation finite element method. Lat. Am. J. Solids Struct. 2015, 12, 2480–2505. [Google Scholar] [CrossRef] [Green Version]
- Nieto, J.J.; Khastan, A.; Ivaz, K. Numerical solution of fuzzy differential equations under generalized differentiability. Nonlinear Anal. Hybrid Syst. 2009, 3, 700–707. [Google Scholar] [CrossRef]
- Hong, L.; Jiang, J.; Sun, J.Q. Fuzzy responses and bifurcations of a forced Duffing oscillator with a triple-well potential. Int. J. Bifurc. Chaos 2015, 25, 1550005. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, S.X.; Litak, G. Uncertainty analysis of bistable vibration energy harvesters based on the improved interval extension. J. Vib. Eng. Technol. 2020, 8, 297–306. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.H.; Wu, J.; Chen, Y.D. Interval optimization for uncertain structures. Finite Elem. Anal. Des. 2004, 40, 1379–1398. [Google Scholar] [CrossRef]
- Huang, D.M.; Zhou, S.X.; Han, Q.; Grzegorz, L. Response analysis of the nonlinear vibration energy harvester with an uncertain parameter. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 393–407. [Google Scholar] [CrossRef]
- Wiener, N. The homogeneous chaos. Am. J. Math. 1938, 60, 897–936. [Google Scholar] [CrossRef]
- Sun, T.C. A finite element method for random differential equations with random coefficients. SIAM J. Numer. Anal. 1979, 16, 1019–1035. [Google Scholar] [CrossRef]
- Li, J. Stochastic Structural System-Analysis and Modeling; Science Press: Beijing, China, 1996. [Google Scholar]
- Xiu, D.B.; Karniadakis, G.E. The wiener-askey polynomial chaos for stochastic differential equations. SIAM J. Sci. Comput. 2002, 24, 619–644. [Google Scholar] [CrossRef]
- Xiu, D.B. Numerical methods for stochastic computations: A spectral method approach. Commun. Comput. Phys. 2010, 5, 242–272. [Google Scholar]
- Fang, T.; Leng, X.L.; Song, C.Q. Chebyshev polynomial approximation for dynamical response problem of random system. J. Sound Vib. 2003, 266, 198–206. [Google Scholar] [CrossRef]
- Fang, T.; Leng, X.L.; Ma, X.P.; Meng, G. λ-PDF and Gegenbauer polynomial approximation for dynamic response problems of random structures. Acta Mech. Sin. 2004, 20, 292–298. [Google Scholar]
- Ma, S.J.; Xu, W. Period-doubling bifurcation in an extended van der Pol system with bounded random parameter. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 2256–2265. [Google Scholar] [CrossRef]
- Zhao, K.Y.; Ma, S.J. Qualitative analysis of a two-group SVIR epidemic model with random effect. Adv. Differ. Equ. 2021, 2021, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.L.; Lei, Y.M.; Fang, T. Stochastic chaos in a Duffing oscillator and its control. Chaos Solitons Fractals 2006, 27, 459–469. [Google Scholar] [CrossRef]
- Sun, X.J.; Xu, W.; Ma, S.J. Period-doubling bifurcation of a double-well Duffing-van der Pol system with bounded random parameters. Acta Phys. Sin. 2006, 55, 610–616. [Google Scholar]
- Zhang, Y.; Xu, W.; Fang, T. Stochastic Hopf bifurcation and chaos of stochastic Bonhoeffer-van der Pol system via Chebyshev polynomial approximation. Appl. Math. Comput. 2007, 190, 1225–1236. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Duan, X.; Shi, Y.; Yue, X. Response Analysis of the Tristable Energy Harvester with an Uncertain Parameter. Appl. Sci. 2021, 11, 9979. https://doi.org/10.3390/app11219979
Zhang Y, Duan X, Shi Y, Yue X. Response Analysis of the Tristable Energy Harvester with an Uncertain Parameter. Applied Sciences. 2021; 11(21):9979. https://doi.org/10.3390/app11219979
Chicago/Turabian StyleZhang, Ying, Xiaxia Duan, Yu Shi, and Xiaole Yue. 2021. "Response Analysis of the Tristable Energy Harvester with an Uncertain Parameter" Applied Sciences 11, no. 21: 9979. https://doi.org/10.3390/app11219979
APA StyleZhang, Y., Duan, X., Shi, Y., & Yue, X. (2021). Response Analysis of the Tristable Energy Harvester with an Uncertain Parameter. Applied Sciences, 11(21), 9979. https://doi.org/10.3390/app11219979