
Designing and Simulating the Control Process of a Feed Pusher Robot Used on a Dairy Farm




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- -
- medical treatment insurance—15.5%, of which the employer contributes 7.3%;
- -
- medical care insurance—1.7% of monthly wages;
- -
- pension insurance—19.9% of monthly gross wages, of which the employer pays 10%;
- -
- insurance against unemployment—2.8% of monthly gross wages.
2. Materials and Methods
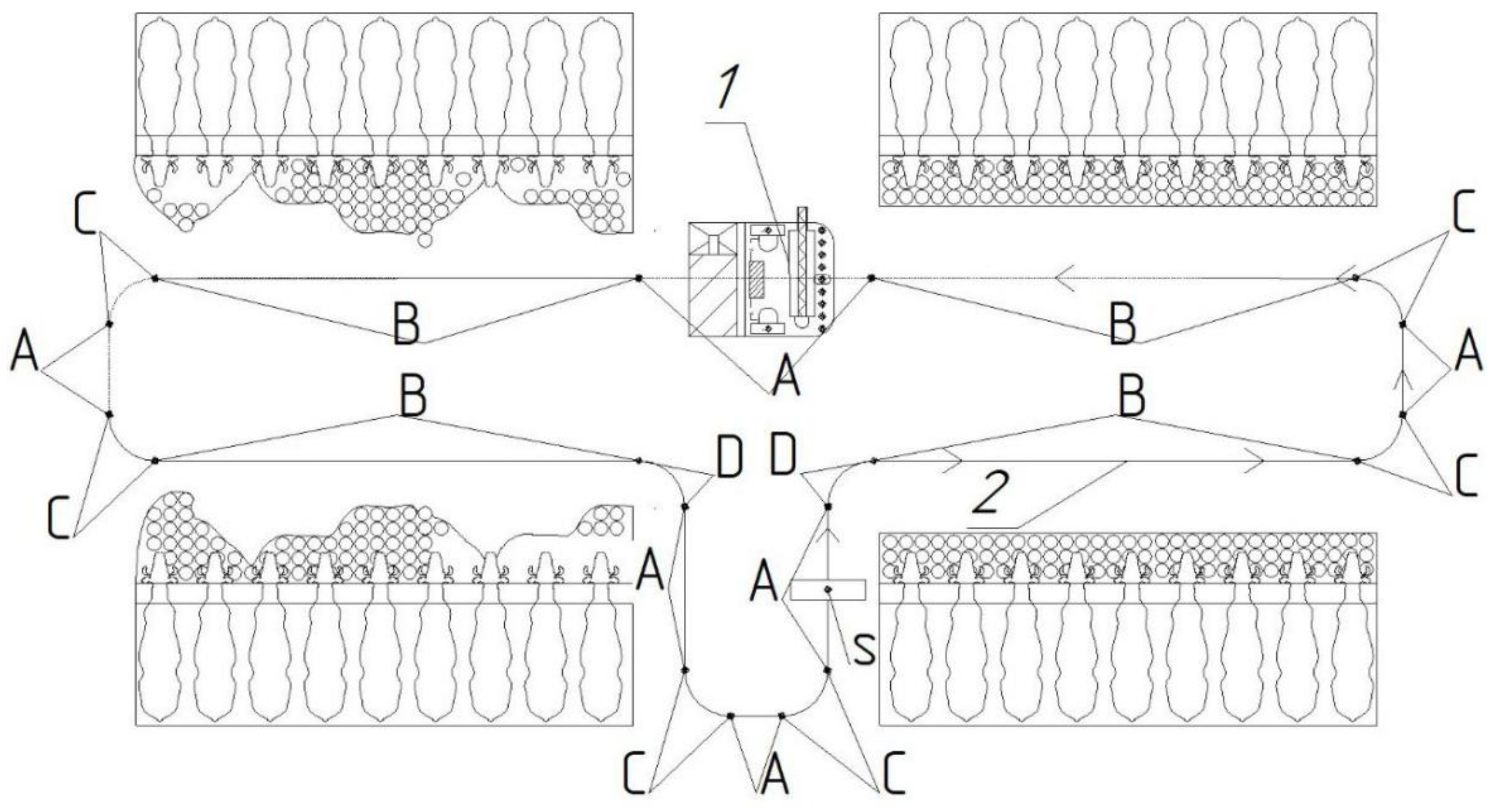
2.1. Technological Conditions for the Robot’s Travelling
2.2. Features of Cattle Feeding, Feed Additives and Their Ratio in the Diet
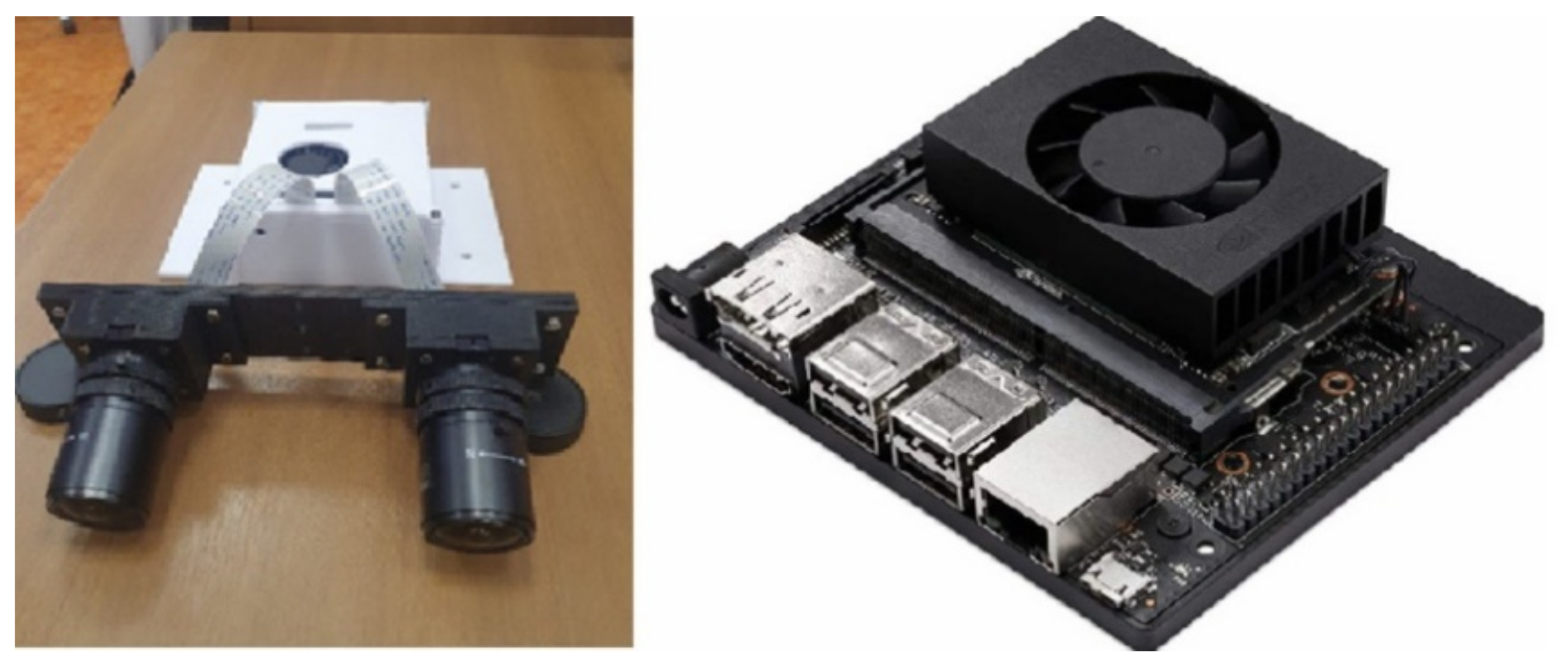
2.3. Computer and Physical Modeling
3. Results
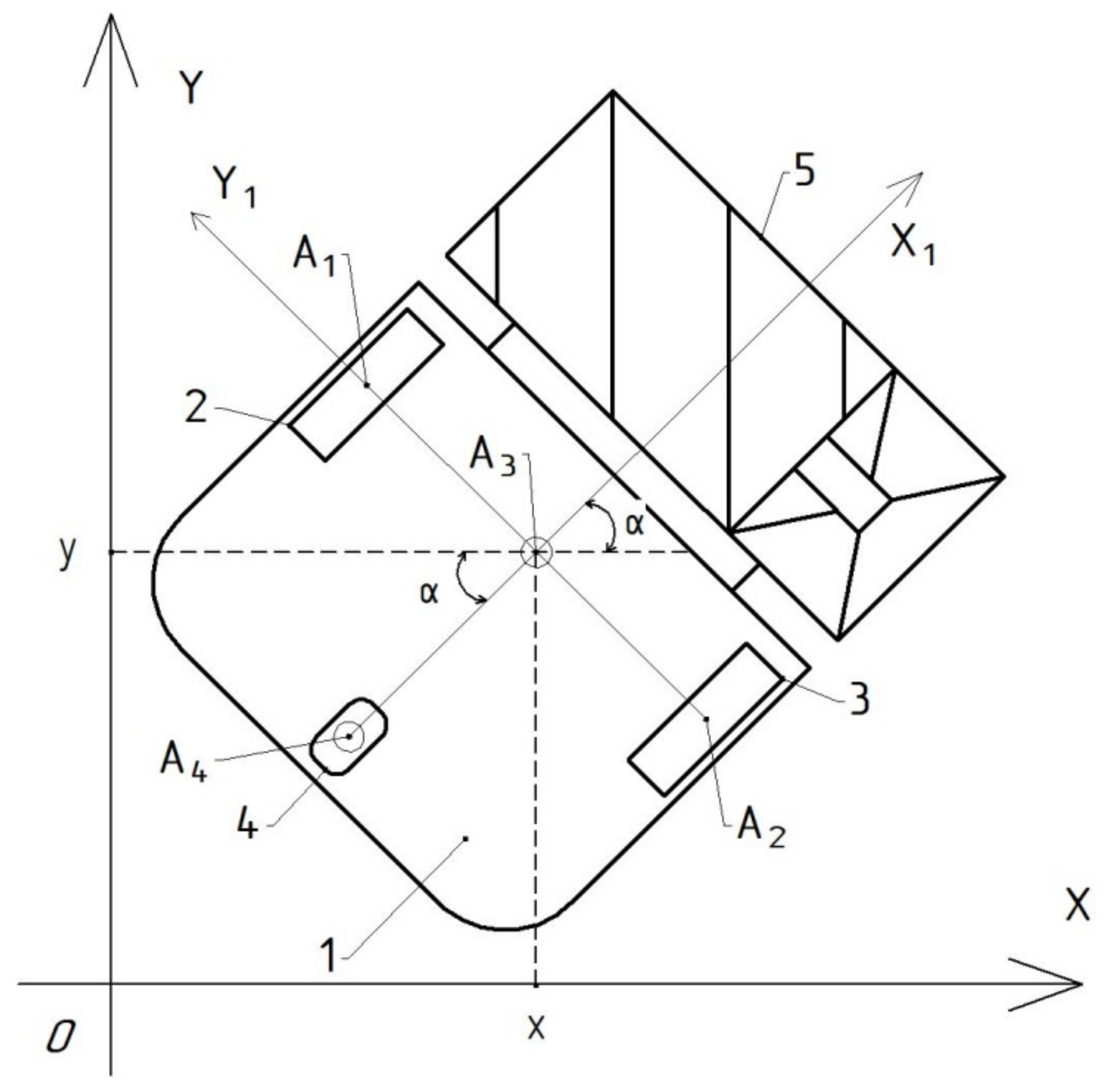
3.1. Results of an Artificial Experiment (Kinematic Model and Dynamic Model of the Robot)
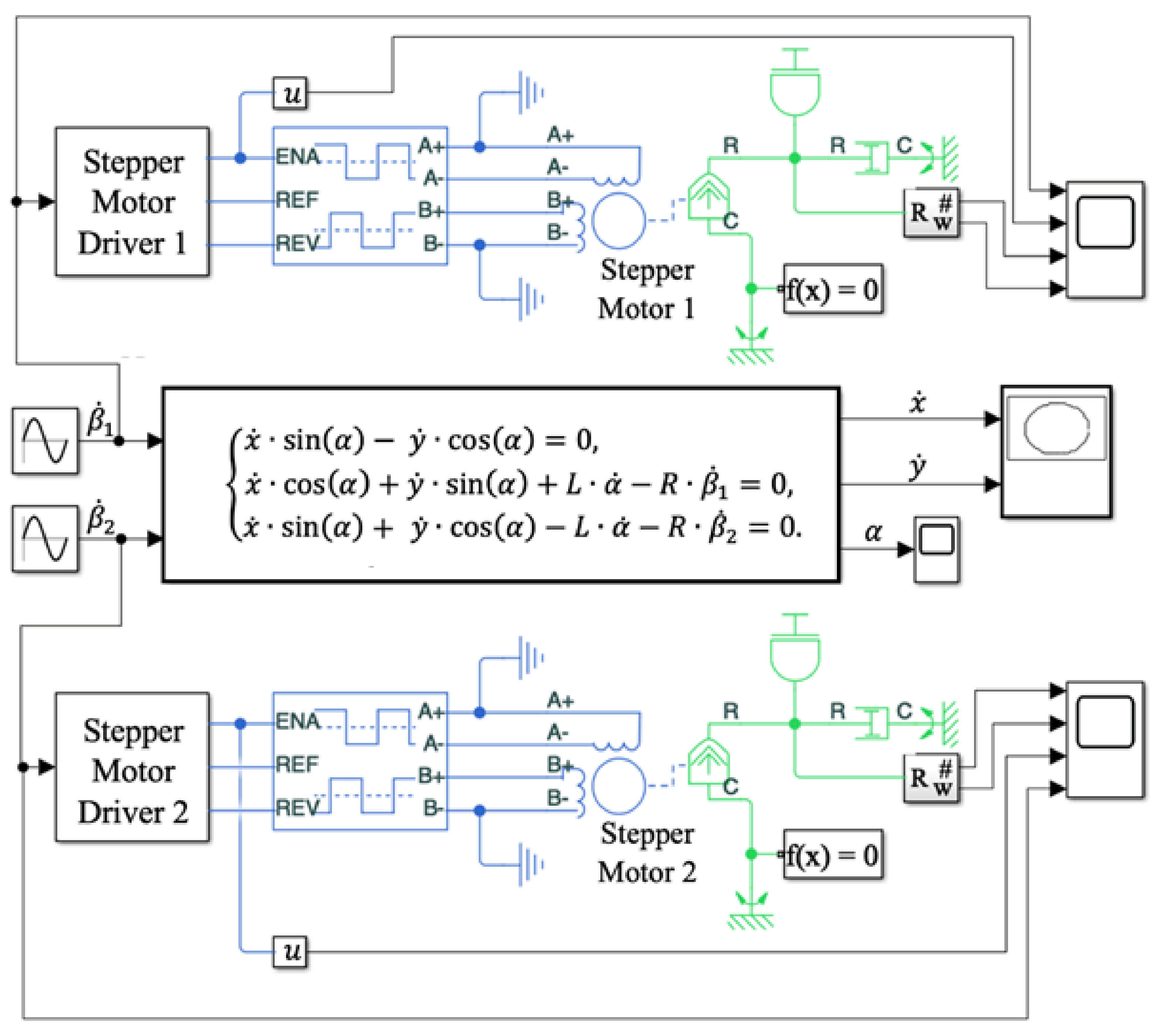
3.2. Control System Design
3.3. Simulations (Modeling)
4. Discussion
5. Conclusions
- The considered mathematical model of the mobile feed pusher presents a sufficient set of tools that can serve as the basis for designing and improving the robot in the engineering analysis and the selection of actuators.
- The use of the designed robot can significantly facilitate the farmer’s work by carrying out labor-intensive operations to push feed on the feed table without human intervention.
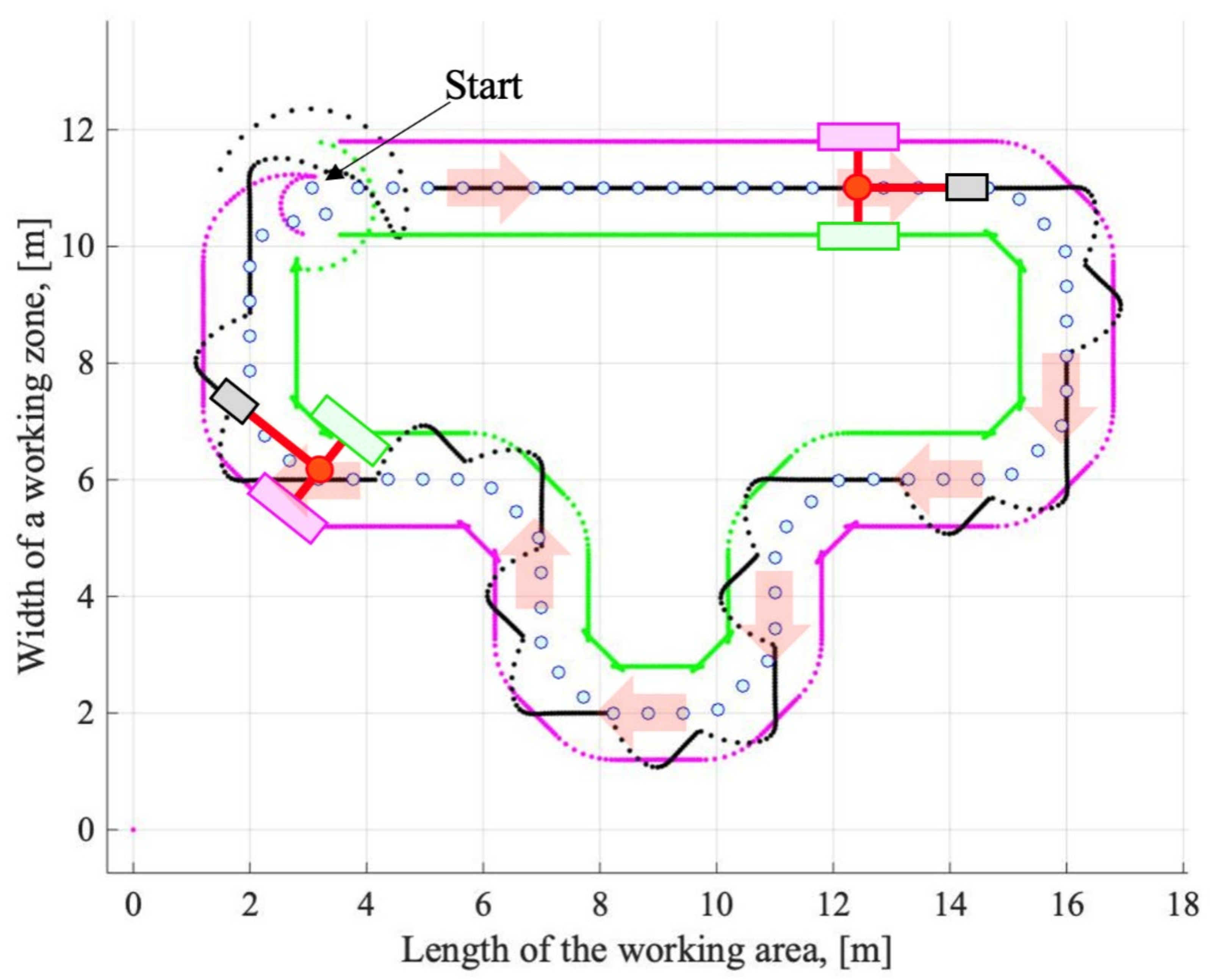
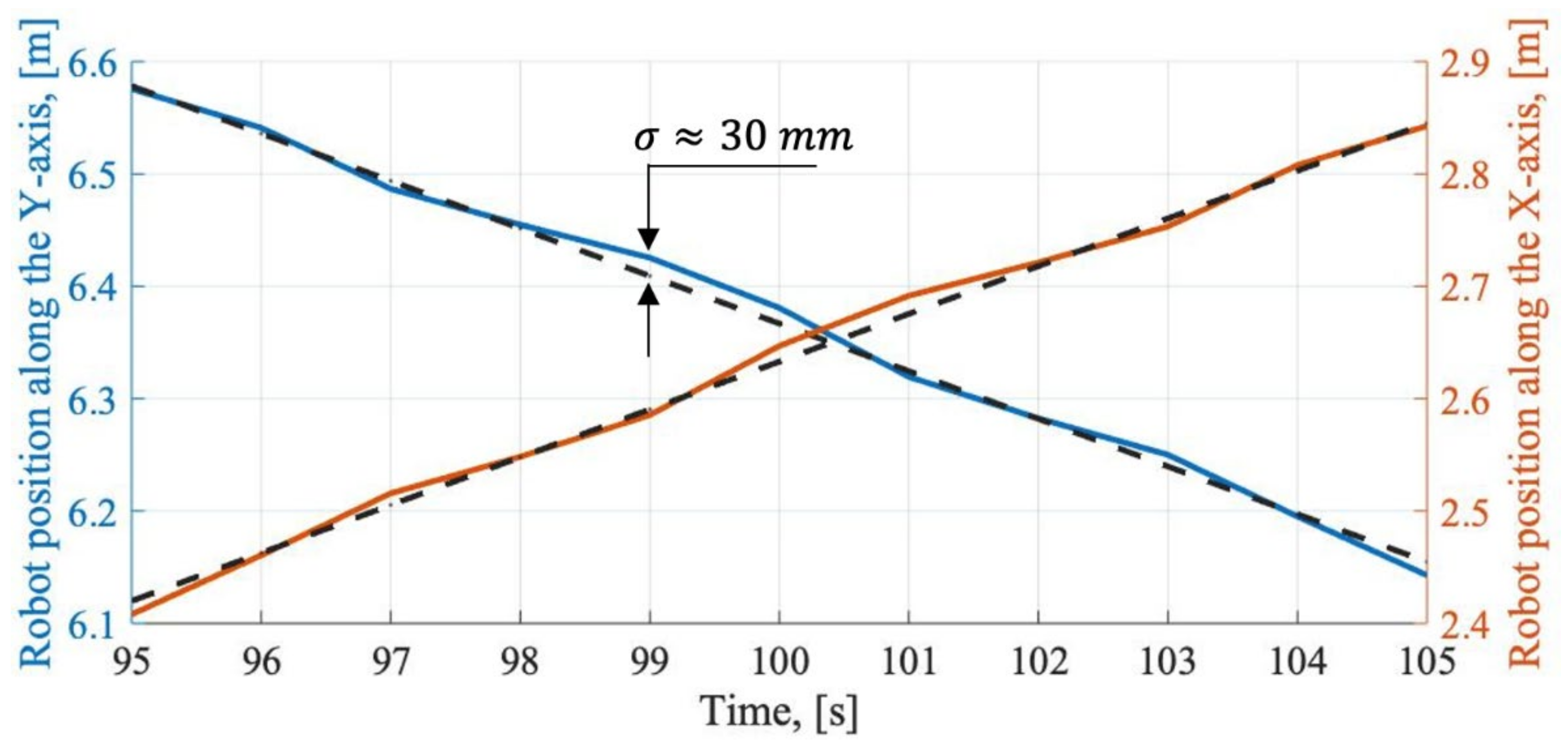
- When using inductive sensors and the metal strip contour, the minor positioning error of the wheeled robot was compared with the binocular vision system. The animals present at the feed table may cause interference in the binocular vision system and destabilize the control algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Pavkin, D.Y.; Nikitin, E.A.; Zobov, V.A. Robotic System for Maintenance of Feed Table for Livestock Complexes. Agric. Mach. Technol. 2020, 14, 33–38. [Google Scholar] [CrossRef]
- Nabokov, V.I.; Novopashin, L.A.; Denyozhko, L.V.; Sadov, A.A.; Ziablitckaia, N.V.; Volkova, S.A.; Speshilova, I.V. Applications of feed pusher robots on cattle farmings and its economic efficiency. Int. Trans. J. Eng. Manag. Appl. Sci. Technol. 2020, 14, 11. [Google Scholar] [CrossRef]
- Oberschätzl, R.; Haidn, B.; Neiber, J.; Neser, S. Automatic feeding systems for cattle—A study of the energy consumption of the techniques. In Proceedings of the Environmentally Friendly Agriculture and Forestry for Future Generations XXXVI CIOSTA CIGR V Conference, Saint Petersburg, Russia, 26–28 May 2015. [Google Scholar]
- Buza, M.; Holden, L.; White, R.; Ishler, V. Evaluating the effect of ration composition on income over feed cost and milk yield. J. Dairy Sci. 2014, 97, 3073–3080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Albright, J. Feeding Behavior of Dairy Cattle. J. Dairy Sci. 1993, 76, 485–498. [Google Scholar] [CrossRef]
- Harper, M.; Oh, J.; Giallongo, F.; Lopes, J.; Weeks, H.; Faugeron, J.; Hristov, A. Short communication: Preference for flavored concentrate premixes by dairy cows. J. Dairy Sci. 2016, 99, 6585–6589. [Google Scholar] [CrossRef] [PubMed]
- Miller-Cushon, E.; Devries, T. Feed sorting in dairy cattle: Causes, consequences, and management. J. Dairy Sci. 2017, 100, 4172–4183. [Google Scholar] [CrossRef]
- Bach, A.; Iglesias, C.; Busto, I. Technical Note: A Computerized System for Monitoring Feeding Behavior and Individual Feed Intake of Dairy Cattle. J. Dairy Sci. 2004, 87, 4207–4209. [Google Scholar] [CrossRef]
- Wolf, C. Understanding the milk-to-feed price ratio as a proxy for dairy farm profitability. J. Dairy Sci. 2010, 93, 4942–4948. [Google Scholar] [CrossRef]
- Deniz, N.N.; Chelotti, J.O.; Galli, J.R.; Planisich, A.M.; Larripa, M.J.; Rufiner, H.L.; Giovanini, L.L. Embedded system for real-time monitoring of foraging behavior of grazing cattle using acoustic signals. Comput. Electron. Agric. 2017, 138, 167–174. [Google Scholar] [CrossRef]
- De Berg, M.; Gerrits, D.H.P. Computing Push Plans For Disk-Shaped Robots. Int. J. Comput. Geom. Appl. 2013, 23, 29–48. [Google Scholar] [CrossRef] [Green Version]
- Rudolfs, R. Agris Nikitenko Development of Free-Flowing Pile Pushing Algorithm for Autonomous Mobile Feed-Pushing Robots in Cattle Farms. Eng. Rural. Dev. 2018, 23, 958–963. [Google Scholar] [CrossRef]
- Sekiguchi, S.; Yorozu, A.; Kuno, K.; Okada, M.; Watanabe, Y.; Takahashi, M. Human-friendly control system design for two-wheeled service robot with optimal control approach. Robot. Auton. Syst. 2020, 131, 103562. [Google Scholar] [CrossRef]
- Fonseca, L.M.; Savi, M.A. Nonlinear dynamics of an autonomous robot with deformable origami wheels. Int. J. Non-Linear Mech. 2020, 125, 103533. [Google Scholar] [CrossRef]
- Tsai, S.-H.; Kao, L.-H.; Lin, H.-Y.; Lin, T.-C.; Song, Y.-L.; Chang, L.-M. A Sensor Fusion Based Nonholonomic Wheeled Mobile Robot for Tracking Control. Sensors 2020, 20, 7055. [Google Scholar] [CrossRef] [PubMed]
- De León, J.; Cebolla, R.; Barrientos, A. A Sensor Fusion Method for Pose Estimation of C-Legged Robots. Sensors 2020, 20, 6741. [Google Scholar] [CrossRef]
- Wang, F.; Qin, Y.; Guo, F.; Ren, B.; Yeow, J.T.W. Adaptive Visually Servoed Tracking Control for Wheeled Mobile Robot with Uncertain Model Parameters in Complex Environment. Complexity 2020, 2020, 8836468. [Google Scholar] [CrossRef]
- Xin, L.; Wang, Q.; She, J.; Li, Y. Robust adaptive tracking control of wheeled mobile robot. Robot. Auton. Syst. 2016, 78, 36–48. [Google Scholar] [CrossRef]
- Wu, H.-M.; Karkoub, M. Hierarchical Fuzzy Sliding-Mode Adaptive Control for the Trajectory Tracking of Differential-Driven Mobile Robots. Int. J. Fuzzy Syst. 2018, 21, 33–49. [Google Scholar] [CrossRef]
- Wu, X.; Jin, P.; Zou, T.; Qi, Z.; Xiao, H.; Lou, P. Backstepping Trajectory Tracking Based on Fuzzy Sliding Mode Control for Differential Mobile Robots. J. Intell. Robot. Syst. 2019, 96, 109–121. [Google Scholar] [CrossRef]
- Shtessel, Y.; Taleb, M.; Plestan, F. A novel adaptive-gain supertwisting sliding mode controller: Methodology and application. Automatica 2012, 48, 759–769. [Google Scholar] [CrossRef]
- Khalil, H.K.; Praly, L. High-gain observers in nonlinear feedback control. Int. J. Robust Nonlinear Control 2014, 24, 993–1015. [Google Scholar] [CrossRef]
- Jin, X. Fault-tolerant iterative learning control for mobile robots non-repetitive trajectory tracking with output constraints. Automatica 2018, 94, 63–71. [Google Scholar] [CrossRef]
- Boukens, M.; Boukabou, A.; Chadli, M. Robust adaptive neural network-based trajectory tracking control approach for nonholonomic electrically driven mobile robots. Robot. Auton. Syst. 2017, 92, 30–40. [Google Scholar] [CrossRef]
- Bloch, V.; Levit, H.; Halachmi, I. Assessing the potential of photogrammetry to monitor feed intake of dairy cows. J. Dairy Res. 2019, 86, 34–39. [Google Scholar] [CrossRef] [PubMed]
- Halachmi, I.; Ben Meir, Y.; Miron, J.; Maltz, E. Feeding behavior improves prediction of dairy cow voluntary feed intake but cannot serve as the sole indicator. Animal 2016, 10, 1501–1506. [Google Scholar] [CrossRef]
- Bargo, F.; Muller, L.; Delahoy, J.; Cassidy, T. Milk Response to Concentrate Supplementation of High Producing Dairy Cows Grazing at Two Pasture Allowances. J. Dairy Sci. 2002, 85, 1777–1792. [Google Scholar] [CrossRef] [Green Version]
- Bach, A.; Cabrera, V. Robotic milking: Feeding strategies and economic returns. J. Dairy Sci. 2017, 9, 7720–7728. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schneider, L.; Volkmann, N.; Kemper, N.; Spindler, B. Feeding Behavior of Fattening Bulls Fed Six Times per Day Using an Automatic Feeding System. Front. Vet. Sci. 2020, 7, 43. [Google Scholar] [CrossRef] [Green Version]
- Halachmi, I.; Edan, Y.; Maltz, E.; Peiper, U.; Moallem, U.; Brukental, I. A real-time control system for individual dairy cow food intake. Comput. Electron. Agric. 1998, 20, 131–144. [Google Scholar] [CrossRef]
- Bach, A.; Valls, N.; Solans, A.; Torrent, T. Associations between Nondietary Factors and Dairy Herd Performance. J. Dairy Sci. 2008, 91, 3259–3267. [Google Scholar] [CrossRef] [Green Version]
- Pezzuolo, A.; Chiumenti, A.; Sartori, L.; Da Borso, F. Automatic feeding system: Evaluation of energy consumption and labour requirement in north-east italy dairy farm. In Proceedings of the 15th International Scientific Conference: Engineering for Rural Development, Jelgava, Latvia, 25–27 May 2016; pp. 882–887. [Google Scholar]
- Reger, M.; Bernhardt, H.; Stumpenhausen, J. Navigation and personal protection in automatic feeding systems. Actual Tasks Agric. Eng. 2017, 45, 523–530. [Google Scholar]
- Grechin, G.; Shilin, D.; Zayceva, A. Development of an Algorithm for Searching the Optimal Trajectory of the Object in the Conditions of Given Restrictions. In Proceedings of the 2020 V International Conference on Information Technologies in Engineering Education (Inforino), Moscow, Russia, 14–17 April 2020; pp. 1–4. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pavkin, D.Y.; Shilin, D.V.; Nikitin, E.A.; Kiryushin, I.A. Designing and Simulating the Control Process of a Feed Pusher Robot Used on a Dairy Farm. Appl. Sci. 2021, 11, 10665. https://doi.org/10.3390/app112210665
Pavkin DY, Shilin DV, Nikitin EA, Kiryushin IA. Designing and Simulating the Control Process of a Feed Pusher Robot Used on a Dairy Farm. Applied Sciences. 2021; 11(22):10665. https://doi.org/10.3390/app112210665
Chicago/Turabian StylePavkin, Dmitriy Yu., Denis V. Shilin, Evgeniy A. Nikitin, and Ivan A. Kiryushin. 2021. "Designing and Simulating the Control Process of a Feed Pusher Robot Used on a Dairy Farm" Applied Sciences 11, no. 22: 10665. https://doi.org/10.3390/app112210665
APA StylePavkin, D. Y., Shilin, D. V., Nikitin, E. A., & Kiryushin, I. A. (2021). Designing and Simulating the Control Process of a Feed Pusher Robot Used on a Dairy Farm. Applied Sciences, 11(22), 10665. https://doi.org/10.3390/app112210665