1. Introduction
A recent research into underwater acoustic communication, sensor and acoustic modem technologies has paved the way for various undersea and ocean operations [
1,
2,
3,
4,
5]. Emerging application areas include oceanographic exploration for marine life, archaeological studies, and marine search and rescue missions. Other important applications, such as improved offshore petroleum exploration, monitoring, and control of underwater pipelines, border and military operations, fish farming, freshwater reservoir management, and tsunami and sea quake early warning systems [
1,
2,
3,
4,
5] are also being explored.
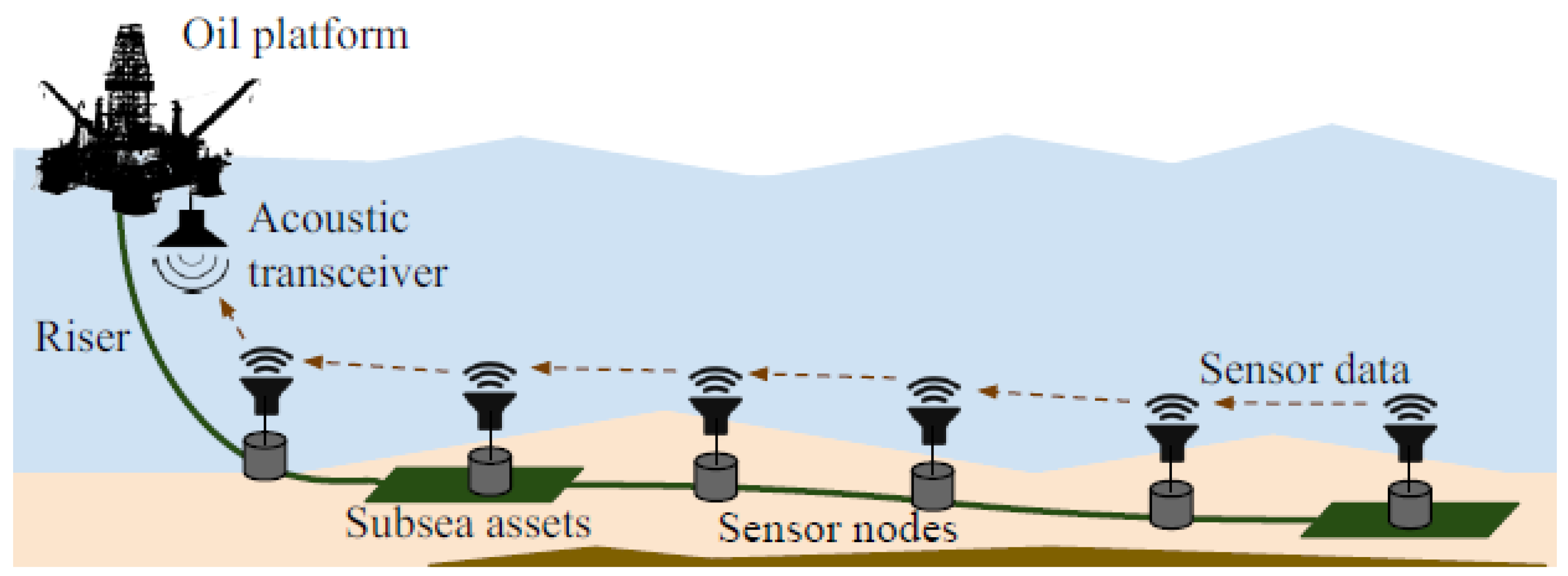
Monitoring subsea oil and gas infrastructure is a key application area of underwater acoustic sensor technology. This is because there are a number of underwater pipeline networks spanning long distances such as the Langeled pipeline in the North Sea measuring about 1200 km [
6]. Most of these pipelines carry petroleum products. Timely detection of leakages and corrosion along these pipelines is critical in order to avoid financial loss and, more importantly, prevent water body pollution caused by oil spillage. Thus, for effective live monitoring of these pipelines, a multi-hop linear network topology is employed whereby packets are relayed from a source nodes via the neighbouring nodes to one or more sink nodes. A typical multi-hop topology linear underwater pipeline sensor network based monitoring system is shown in
Figure 1.
Acoustic waves are preferable for underwater communication because they propagate much further than electromagnetic and optical waves [
7]. Acoustic systems can also operate with lower transmission power compared to electromagnetic and optical systems [
1]. However, establishment of communication among nodes underwater is a challenging task because of the complicated underwater channel characteristics, slow propagation of sound waves, and limited usable frequency bandwidth [
3,
8,
9,
10]. These challenges (notably long propagation delays and low available bandwidth) have made designing medium access control (MAC) protocols for underwater networks difficult [
1,
7]. This has also made the traditional MAC approaches unsuitable or only able to provide poor network performance.
Various MAC protocols that operate in a half-duplex fashion have been developed in order to improve network performance in UANs. Orthogonal access schemes, such as Time Division Multiple Access (TDMA), Frequency Division Multiple Access (FDMA), Code Division Multiple Access (CDMA), and Space Division Multiple Access (SDMA), involve the division of resources (time, frequency, code, and space) into sub-resources to enable collision-free channel access for the network nodes [
12]. Alternative approaches to sharing a single channel among a group of users are either scheduling or contention based. Contention based schemes utilise carrier sensing, handshaking, or random access techniques [
12] to access a shared channel. However, problems of quality of service (QoS) and energy efficiency still persist, mainly due to long propagation delays and limited available bandwidth in the underwater channel [
13]. These network performance problems become more evident in multi-hop UANs. Time-based synchronisation schemes may be an option for short term applications, however, maintaining synchronisation is challenging in underwater networks and may incur significant overheads and, thus, makes synchronisation-based access techniques less viable. In the same vein, long propagation delays also create some uncertainty around channel idle/busy status prediction, which reduces the effectiveness of carrier sense protocols in UANs and this is amplified in multi-hop UANs. Additionally, handshaking techniques as employed in Request-To-Send/Clear-To-Send (RTS/CTS) based protocols [
14,
15,
16,
17] are also highly impacted by long propagation delay, since they can create significant idle time on the channel challenging their suitability for multi-hop UANs. The LTDA-MAC protocol provides better network performance and improved efficiency by using optimised packet scheduling in linear UASN-based pipeline monitoring systems without clock synchronisation at the sensor nodes [
11,
18] for short pipeline half-duplex linear underwater networks. However, this protocol performs poorly for long pipeline scenarios as packet schedules become extremely long, which reduces the frequency at which sensor data can be delivered to the required destination.
With the recent advances in self-interference cancellation for in-band full-duplex communication (a phenomenon whereby network nodes can transmit and receive data packets simultaneously within the same frequency bandwidth), new opportunities are on the horizon for improving spectral use and throughput in acoustic communication systems [
19,
20] are available. Interestingly, this can solve some of the MAC layer problems by potentially improving network performance in terms of providing higher throughput, lower latency, and by providing an opportunity for a node to simultaneously sense the channel while receiving a packet [
21,
22,
23]. This has motivated the design of a new LTDA-MAC protocol for full-duplex based underwater chain network scenarios.
The LTDA-MAC protocol is designed to generate efficient collision-free packet schedules with significantly shorter frame duration. It can leverage full-duplex communications. This can significantly enhance spatial spectrum reuse, especially in the long range pipeline scenarios. We explored the benefit of full-duplex in [
24], which investigated the potential performance gains that can be achieved in full-duplex network scenarios by switching on full-duplex capabilities without having to change the LTDA-MAC protocol. Although simultaneous packet scheduling in the full-duplex nodes achieved collision-free packet schedules with up to 39% and 34% throughput improvement for simple (short pipeline) and challenging (long pipeline) cases, respectively, compared to the half-duplex case, it was observed that spatial re-use could be improved especially for longer pipelines by designing a new protocol capable of fully exploiting the full-duplex capabilities of nodes.
This paper proposes the FD-LTDA-MAC protocol which is designed to achieve further performance improvement by re-developing the traditional LTDA-MAC protocol to fully exploit full-duplex capabilities and enhance spatial reuse for full-duplex underwater multi-hop chain networks. Consequently, this protocol provides much more efficient packet scheduling to achieve higher monitoring rates over long range underwater pipelines using low cost, mid range, low rate, and low power acoustic modems, such as those presented in [
25]. This study is based on numerical simulation and a BELLHOP [
26] based underwater channel model. It builds on prior work, in particular, related to the LTDA-MAC protocol. Hence, this paper presents a new protocol designed for full-duplex communication in linear networks.
The remainder of this work is organised as follows.
Section 2 provides a description of the FD-LTDA-MAC protocol, while, the simulation scenarios are presented in
Section 3.
Section 4 presents the numerical results and discussion, and conclusions are provided in
Section 5.
2. FD-LTDA-MAC Protocol
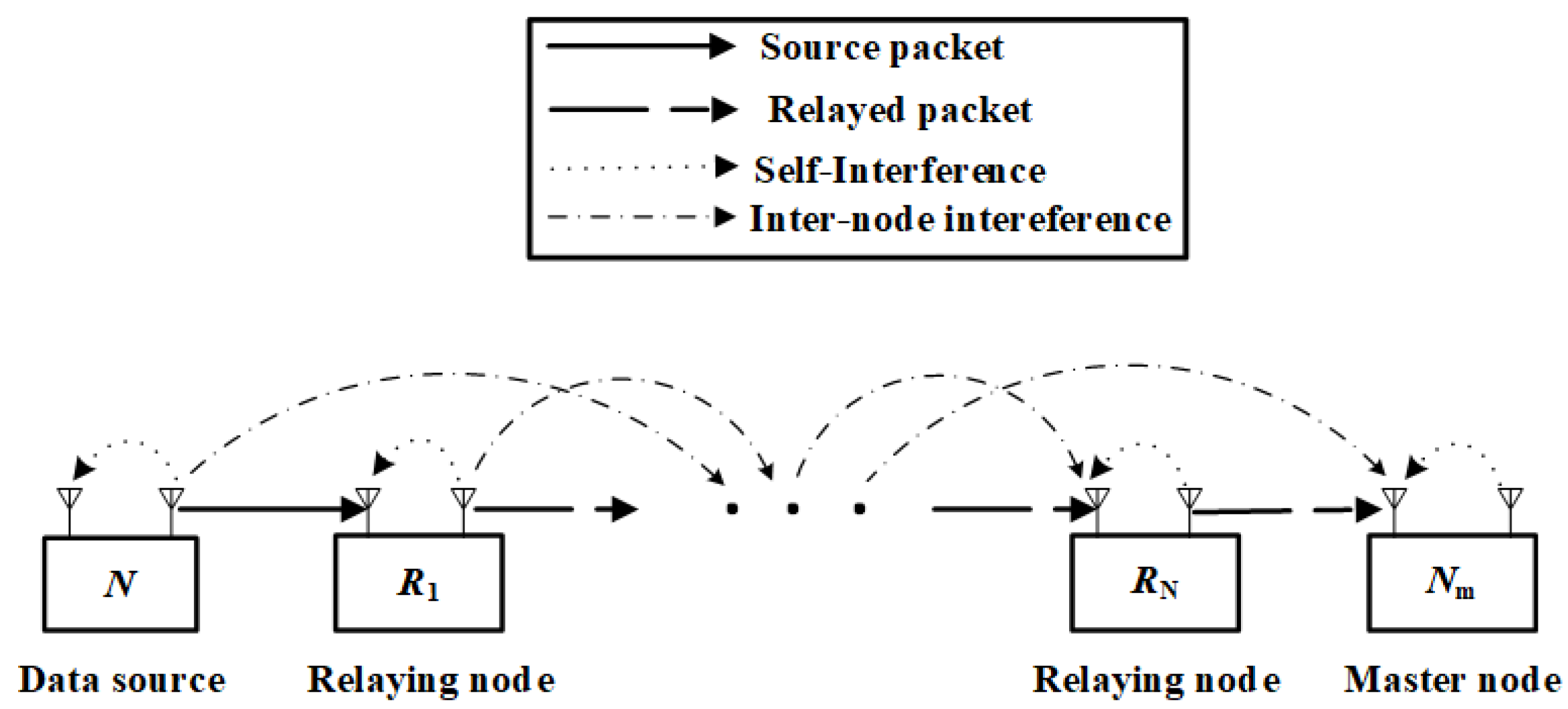
The FD-LTDA-MAC protocol is developed for full-duplex underwater multi-hop chain networks. It is an unsynchronised protocol that locally derives transmission times at the nodes by measuring the delays between nodes receiving a request (REQ) packet and transmitting their data packets. Consider a conceptual diagram of multi-hop chain Full-Duplex Relay (FDR) network shown in
Figure 2.
Each sensor node utilises two-way connections, it connects to the node one hop closer to the sink node up the chain and to a node further down the chain. Upon receiving an REQ packet, transmitting nodes forward REQ packets down the chain to the last node. Every transmitting node responds to the REQ packet query by either acting as a source node and transmitting its own data packet up the chain or by acting as a relay node forwarding data packets up the chain that it received from the node further down the chain. The sink node is responsible for sending the REQ packets to request data packets from the transmitting nodes and to handle eventual reception of data packets from the transmitting nodes. The last transmitting node down the chain does not relay packets, it only transmits its own data packets. Every transmitting node serves as a data source or data forwarder except the last transmitting node, which serves only as a data source. It is assumed that the self-interference is totally cancelled. The new linear constraint is based on full-duplex communication structure to calculate transmit delays for an enhanced packet forwarding among full-duplex nodes. Additionally, a greedy scheduling algorithm uses full-duplex based initial starting point of search, this reduces the time wasted in waiting for an interference lapse before beginning a new transmission and the corresponding propagation delay components.
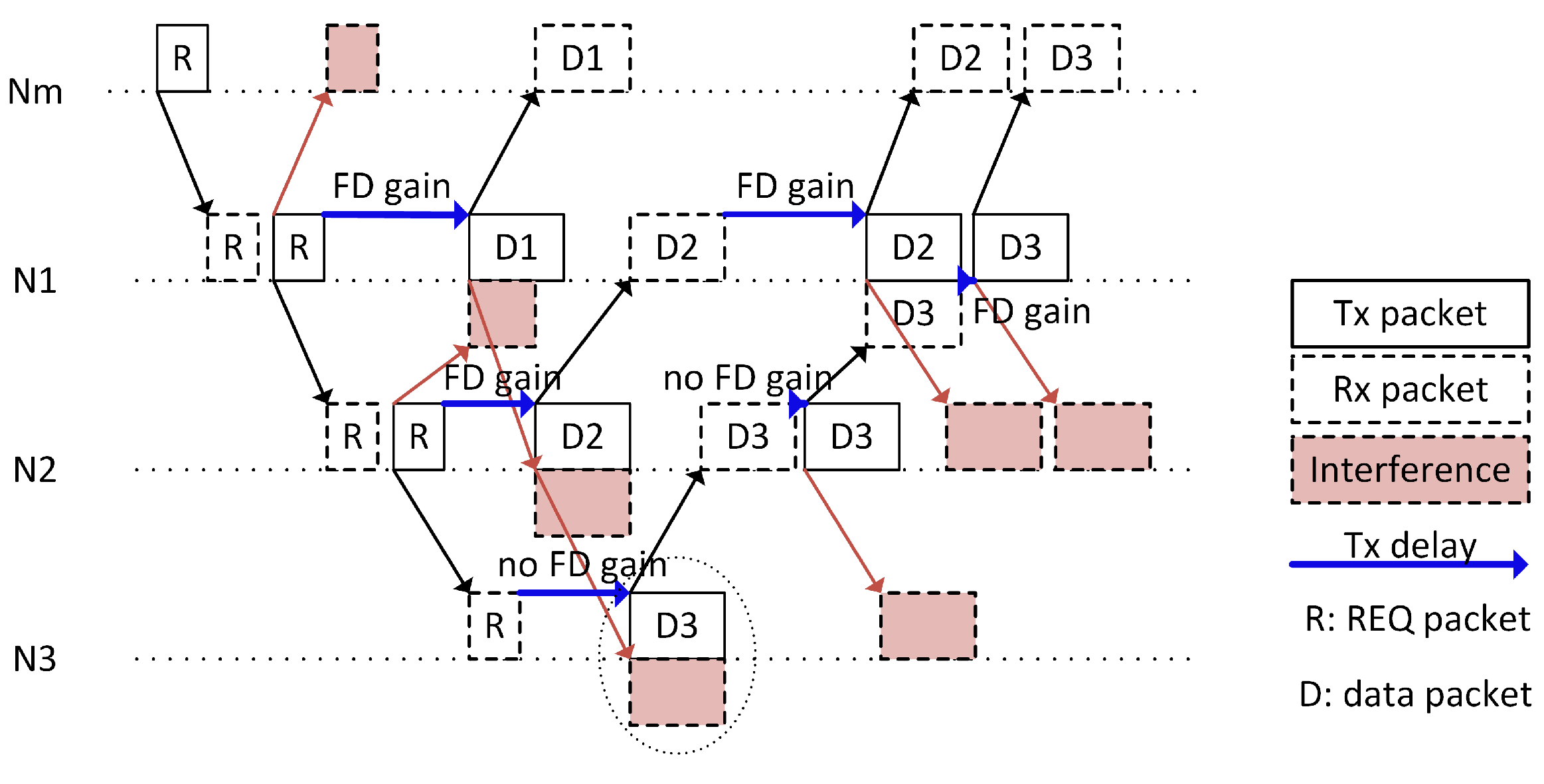
The timing diagram of the FD-LTDA MAC schedule for a typical one-hop interference range full-duplex underwater chain network is shown in
Figure 3. It consists of a master node,
, which serves as the sink node, and three transmitting sensor nodes,
,
, and
. The master node broadcasts REQ packets down the chain through nodes
and
to node
. Nodes
and
forward the REQ packets after an allowable guard interval,
. Upon the reception of a REQ packet by a node, it generates and schedules data packet for transmission or schedules forwarding of a relayed packet up the chain towards
after waiting a certain time called transmit delay. The wait time accounts for only REQ packet interval,
, but excludes the interference reception time, this is because, the FD-LTDA MAC protocol is able to schedule simultaneous transmission and reception of packets. The full-duplex gain (FD gain) is the measure of the transmit delay required for the FD-LTDA MAC protocol to successfully schedule packet transmissions without packet collisions. Examples of FD gain can be found in
Figure 3 where
can transmit data packets (D2 and D3) much earlier than it could in the case of LTDA-MAC protocol. Additionally, D2 can be transmitted earlier by
due to the full-duplex capability compared with LTDA-MAC.
The transmission scheduling is based on the timings and these timings are based on the scheduling algorithm which is described below. In order to find the transmission times, as labelled in
Figure 3, the following algorithm is used. Extending the 4-nodes network of
Figure 3 to the case with
transmitting sensor nodes, the FD-LTDA-MAC schedule transmit delays incurred by a node transmitting its own data packet to a node up the chain are represented by a triangular matrix,
where,
represents the transmit delays incurred by node
i for sending its own data packet(s) and
represents transmit delays for node
i to forward node
j’s data packet(s) given that
. Furthermore,
and
represent the respective transmit delays for a node sending its own data and relaying data from a node down the chain based on the traditional LTDA-MAC scheme.
Transmission schedules are derived by optimally solving for
values in
and the solution yields a minimum frame duration (
) with zero packet collisions (
), where
is the allowable guard interval between scheduled packets and
is a tuple that represents a typical underwater full-duplex chain network topology. The full network topology is defined by an (
) interference binary matrix,
, propagation delay matrix,
, REQ and data packet durations,
and
. The interference matrix can be expressed as:
where
if node
i is in interference range of node
j, and
otherwise. Additionally, the propagation delay from node
i to node
j is given as
.
The FD-LTDA-MAC protocol uses a greedy algorithm to derive collision-free transmission schedules by iterating over transmit delays in
to check for overlaps in time in any pair of transmit/receive packets at a node, or where a separation between scheduled packets is less than
. It compares the data transmission, interference, and reception times to detect a full-duplex transmission, and then forces the algorithm to choose a starting point for the transmit delay search, selecting a local optimal value for it. Moreover, in the case of full-duplex transmission, the initial schedule is modified by removing the allowable separation,
, between the REQ packet interference and transmit data packet at a node. This is because, in full-duplex transmission mode, a receive/transmit overlap in time at a node does not count as a collision but a successful transmission, thus, adding
becomes unnecessary. Additionally, in evaluating the schedule, the additional delay incurred at a node given full-duplex transmission is
. The minimum transmit delay constraint to be imposed on any transmitting node to send its own data packet is given as:
where
is the minimum transmit delay for a node to send its own data. Similarly, the minimum transmit delay constraint imposed on a node for relaying a data packet up the chain from a node further down the chain is represented as:
where
is the minimum transmit delay assigned to node
i for transmitting a packet generated by node
j and
is the propagation delay on the
ith link between adjacent nodes of the network. This constraint provides for the allowable time for a node to receive a packet while transmitting another data packet. Nonetheless, for a node transmitting its own data packet up the chain and forwarding a data packet received from a node further down the chain in a half-duplex mode will resort to the respective minimum transmit delay [
18],
and
The FD-LTDA-MAC protocol is described in Algorithm 1. The network instance is firstly created with appropriate and time step, . Then, the initial collision-free schedule is calculated using a large value of transmit delay, . The algorithm then checks for full-duplex transmissions by looking for overlap in time of transmit times, , and interference time, , among the nodes transmitting their own data packets. It then schedules full-duplex transmission for nodes transmitting own packet(s) using (5). The above process is repeated for relay transmissions, but (6) is used for forwarding the data packets by relay nodes. The features of the FD-LTDA MAC protocol are highlighted as follows:
It uses linear constraints to calculate transmit delays for forwarding packets to reflect full-duplex capabilities;
To allow the greedy scheduling algorithm utilise the full-duplex based initial starting point that excludes data transmission time and the corresponding propagation delay components from the transmit delay time, as allowed by full-duplex communication;
Include full-duplex support in the algorithm to evaluate schedules that are derived for full-duplex transmissions.
| Algorithm 1 FD-LTDA-MAC scheduling based on greedy optimisation algorithm |
- 1:
Create using initial network discovery - 2:
Set the desired guard interval and time step and time step - 3:
Initialise collision-free schedule using: - 4:
fordo - 5:
for do - 6:
Calculate the packet index - 7:
Calculate and - 8:
if then - 9:
Calculate using (5) if , or (6) if - 10:
Initialise Tx delay: - 11:
else - 12:
Calculate using (7) if , or (8) if - 13:
Initialise Tx dealy: - 14:
end if - 15:
while do - 16:
Increment Tx delay: - 17:
end while - 18:
end for - 19:
end for
|
4. Results and Discussion
Here, we consider simulation results of FD-LTDA-MAC, LTDA-MAC, and LTDA-MAC with FD enabled nodes. The comparison is performed using the frame duration, i.e., the frame duration is time taken to complete transmitting a frame from the beginning of the frame to end of the frame. Where frame is a network digital unit that defines a segment of data on a network or communication link in data-link or physical layer usually consisting of preamble, destination, and sources addresses, data payload, and error-checking information. It is important, because it defines the rate at which each node can send a new sensor reading. It is also important to state here that the frame duration is equal to the inverse of the monitoring rate, in other words, the shorter the frame duration, the higher the monitoring rate.
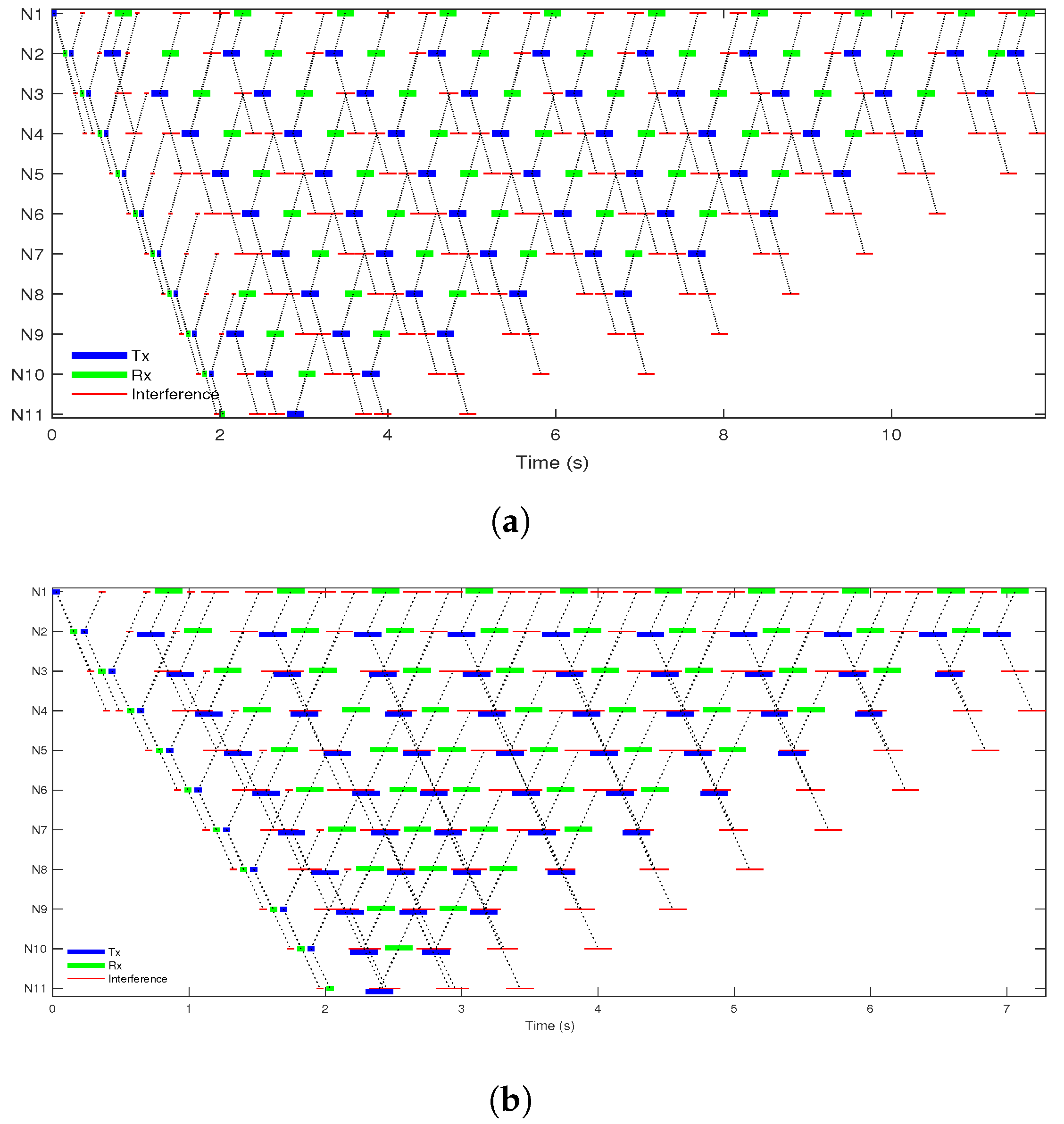
Simulated MAC schedules for FD-LTDA-MAC and LTDA-MAC for a 10-hop 2 km pipeline are presented in
Figure 7. It shows packet schedules for data transmission and reception in the presence of interference. FD-LTDA-MAC shows, a 44% reduction in the frame duration and packets are still correctly received at the desired destination nodes despite the overlap in time between the transmit and interference packets compared to the LTDA-MAC with HD enabled nodes as can be observed in
Figure 7b. This also provides a 10% compression of frame duration against LTDA-MAC with FD enabled nodes presented in [
24]. This compression in the frame duration given correct reception of packets in the presence of overlap in time is made possible by the ability of the FD-LTDA-MAC to fully exploit spectrum reuse. In contrast,
Figure 7a shows a longer frame duration because the half-duplex nodes do not allow simultaneous in-band transmission and LTDA-MAC lacks the capability to handle full-duplex transmissions. As a result, frame durations and end-to-end packet delays are shorter with the FD-LTDA-MAC protocol compared to the LTDA-MAC protocol with HD enabled nodes and LTDA-MAC protocol with FD enabled nodes scenarios.
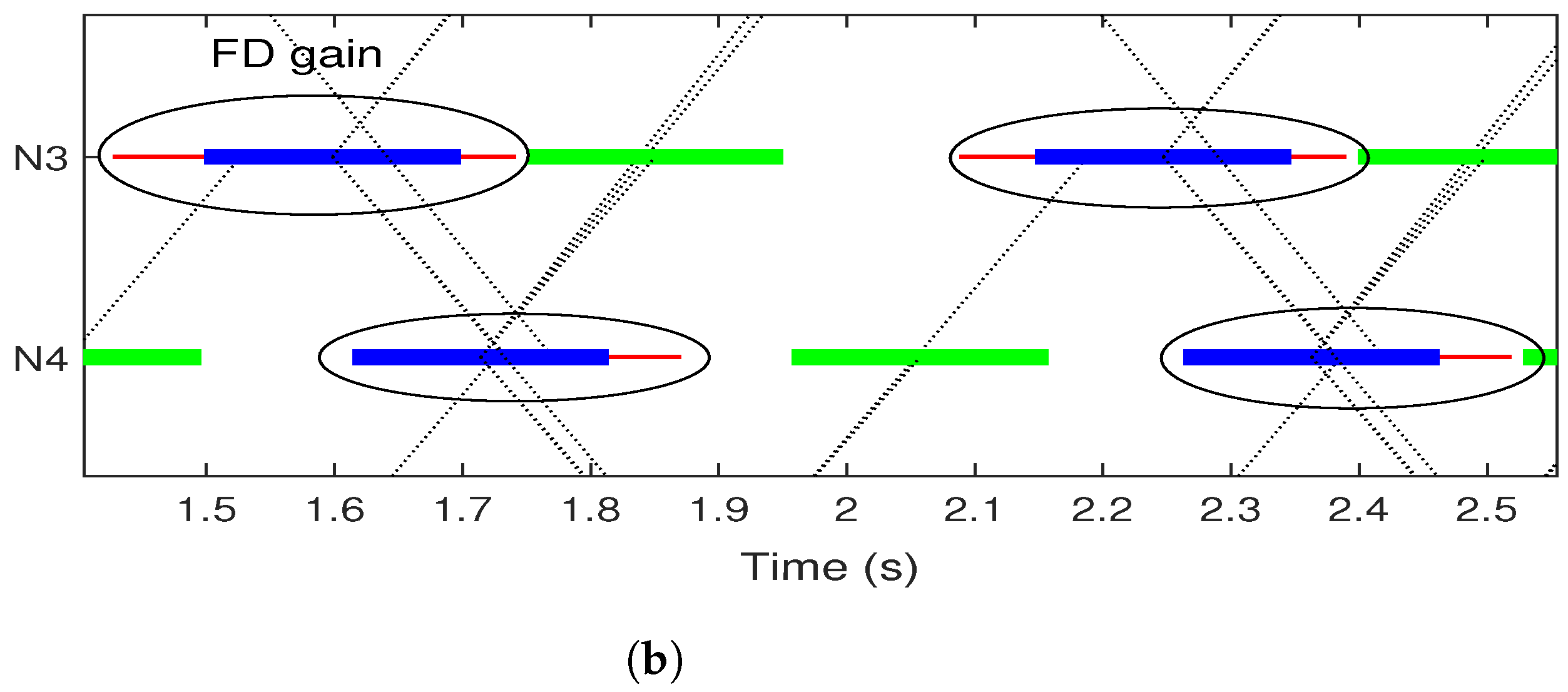
Figure 8a,b show sections of
Figure 7a,b representing a time interval of 1.4–2.5 s involving N3 and N4 nodes. It can be seen that the FD-LTDA-MAC protocol exploits spatial re-use better by scheduling simultaneous in-band transmission and reception, which reduces transmit delays and compresses the overall frame duration, as can be seen as FD gain in
Figure 5b. The LTDA-MAC protocol has the limitation of this capability as shown in
Figure 5a, this causes waste of resources (time), thus, resulting in longer transmit delays.
The following subsections discuss the impact of the frame duration enhancement on the monitoring rate and end-to-end packet delays.
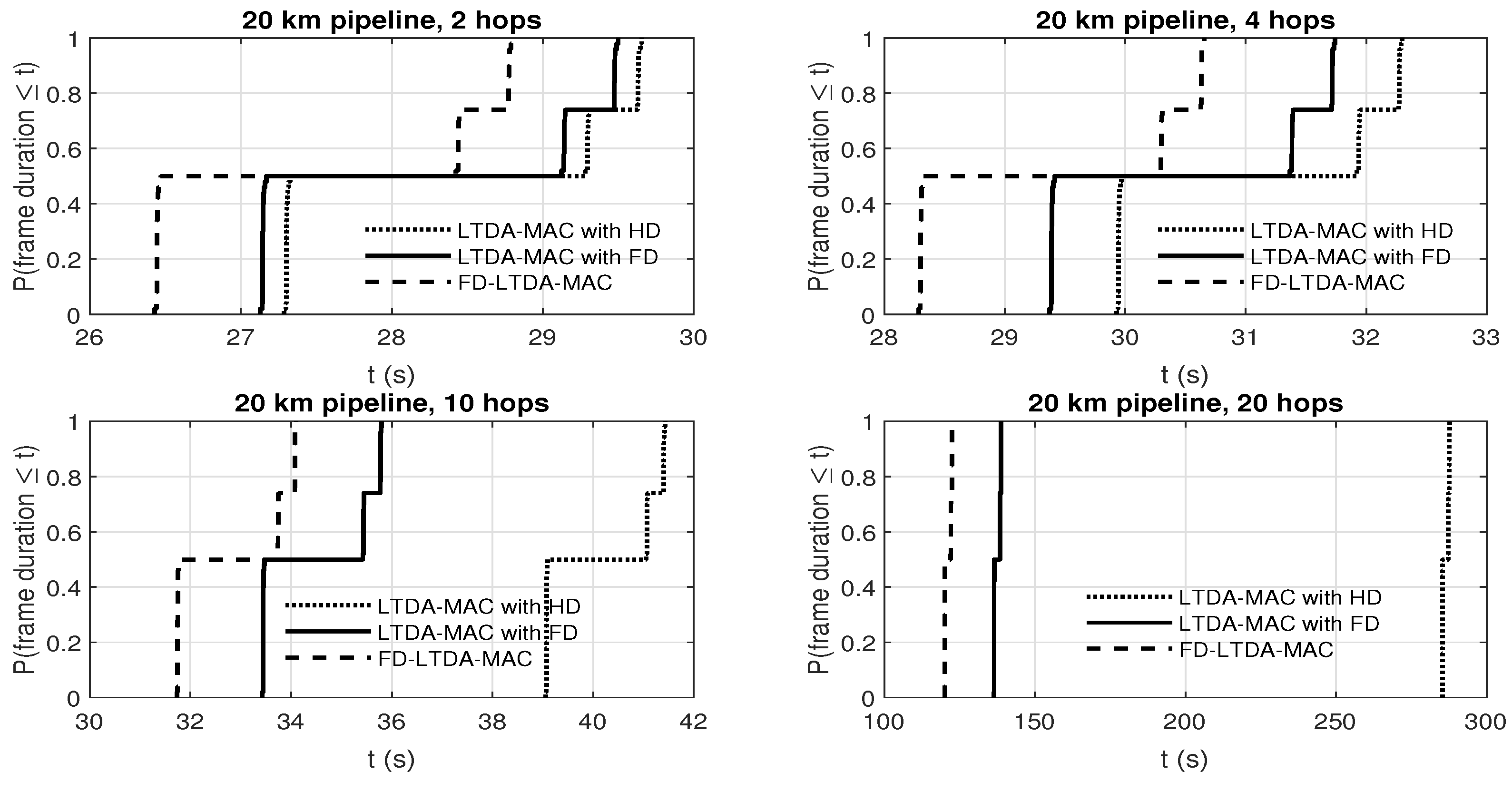
4.1. Small Scale Scenarios: 2, 10, and 20 km Pipelines
The simulation results for small scale scenarios considering short pipelines of few kilometres (2, 10 and 20 km) are presented here. It is important to firstly consider short pipelines with a different number of hops in order to understand the performance of the FD-LTDA-MAC protocol in simple situations where there is a limited opportunity for spatial reuse.
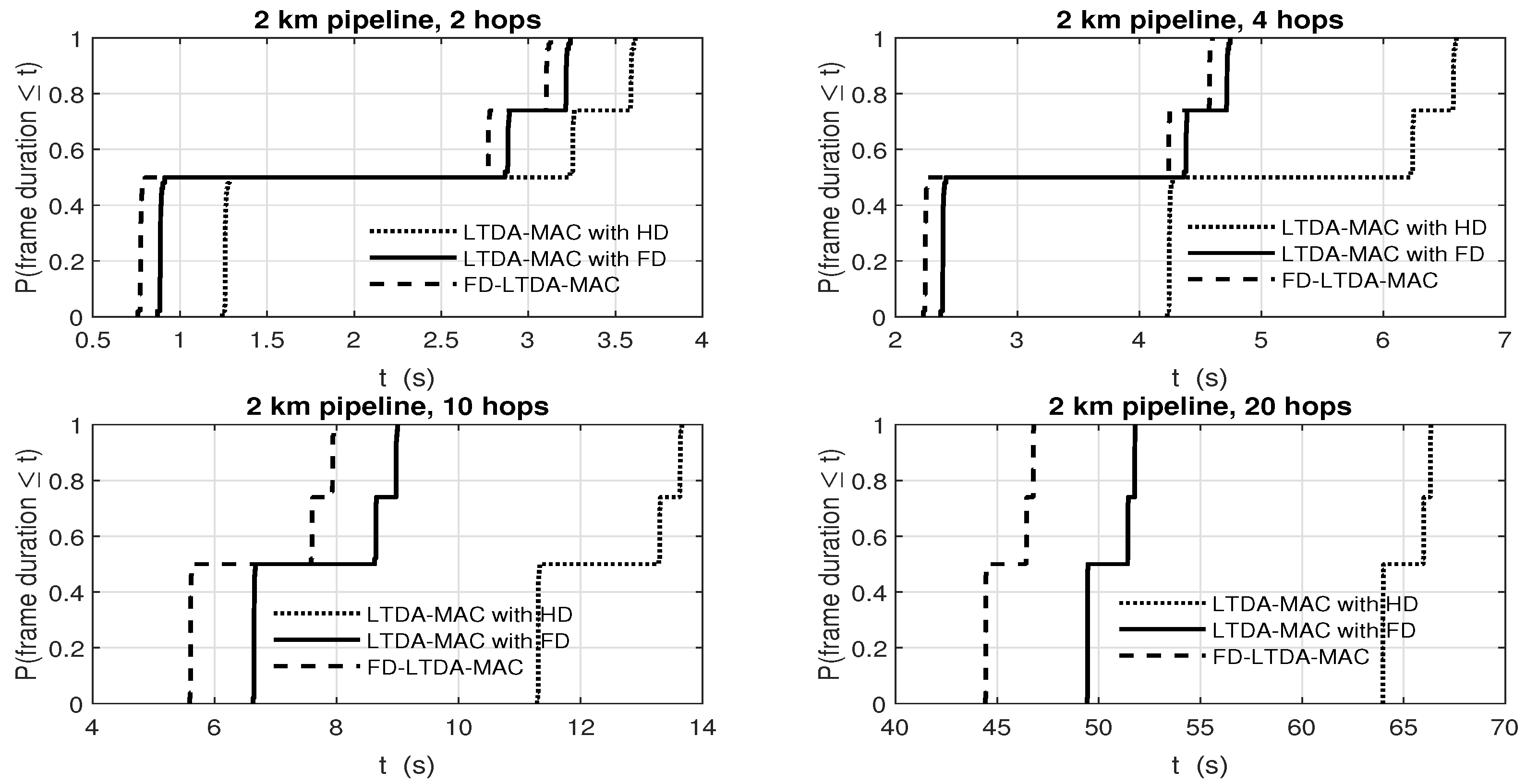
The cumulative distributive function (cdf) plot of frame durations for FD-LTDA-MAC, LTDA-MAC, and LTDA-MAC in FD protocols in small scale scenarios are shown in
Figure 9,
Figure 10 and
Figure 11. The results for a 2 km pipeline configured with 2, 4, 10, and 20 hops can be seen in
Figure 9, which shows that FD-LTDA-MAC can achieve shorter frame durations compared to the LTDA-MAC and LTDA-MAC with FD protocols. The frame duration is reduced on average by 29% and 9% against LTDA-MAC and LTDA-MAC in FD, respectively. Hence, this capability provides better packet schedules which translates into improvement in network throughput even with limited opportunity for spatial reuse.
The frame durations obtained for 10 km and 20 km pipelines as shown in
Figure 10 and
Figure 11 demonstrate a more significant performance improvement compared with 2 km pipeline scenarios. The FD-LTDA-MAC shortens the frame duration by 64% against LTDA-MAC protocol, whereas LTDA-MAC in FD improves by 53% against LTDA-MAC protocol. The significant improvement achieved by FD based protocols is because the search algorithm is able to better exploit longer pipelines.
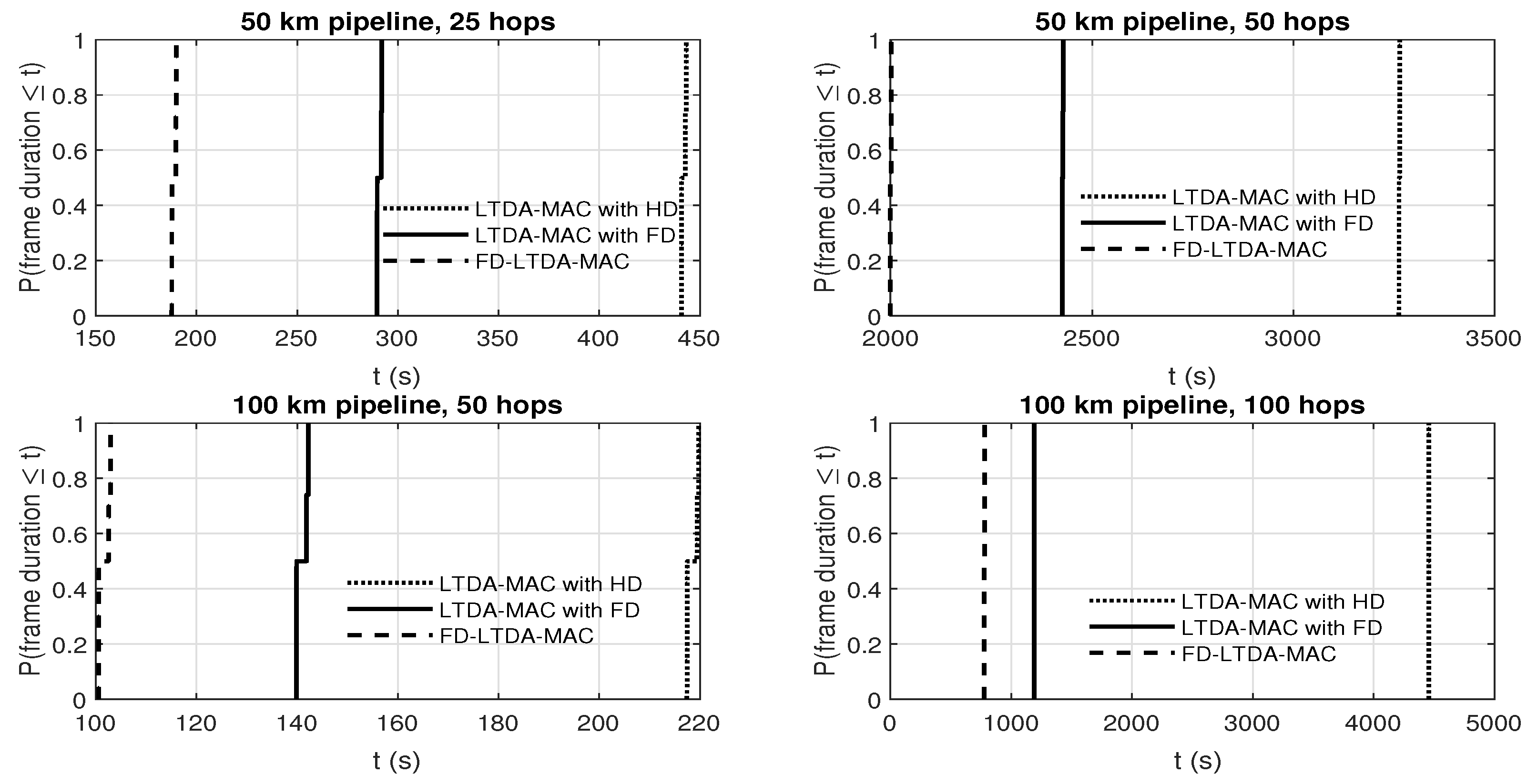
4.2. Medium Scale Scenarios: 50 and 100 km Pipelines
In practice, pipelines span several hundreds to thousands of kilometres, such as the Langeled pipeline in the North Sea measuring about 1200 km [
6], and the 7200 km long pipelines under the gulf of Mexico [
37]. For underwater oil and gas pipeline monitoring, applications such as leak detection require timely sensor readings at certain intervals and demand a high resolution of sensed data. This motivates studying the deployment of FD-LTDA-MAC protocol in medium scale scenarios, so as to understand intermediate performance improvement and to track the improvement by understanding where the optimum performance enhancement lies. The frame durations derived by FD-LTDA-MAC for 50 and 100 km pipelines with 25 and 50 hop configurations as seen in
Figure 12 are of the range 104 s to 779 s, with the lower bound corresponding to the 25 hop case and the upper bound the 100 hop case. In comparison with the frame durations ranging from 218 s to 4457 s and 144 s to 1192 s derived by LTDA-MAC and LTDA-MAC over FD nodes, respectively, there is significant reduction in the frame duration. The performance improvement as a ratio can be approximated as 1:1.4:2 for the lower bound and 1:2:6 for the upper bound. Thus, LTDA-MAC performs poorly in medium scale scenarios compared to FD-LTDA-MAC. This means FD-LTDA-MAC can achieve higher monitoring rates compared to LTDA-MAC and LTDA-MAC in FD.
Furthermore, the 25 and 50 hop scenarios for 50 and 100 km pipelines, respectively, show that more regular sensing along a pipeline can be achieved by FD-LTDA-MAC protocol with a 2 km sensing range. The results also indicate that the greedy optimisation algorithm in FD-LTDA-MAC can achieve a better solution in longer pipelines with full-duplex capability. This is the reason why performance improvement achieved in medium scale scenarios is superior compared with small scale scenarios.
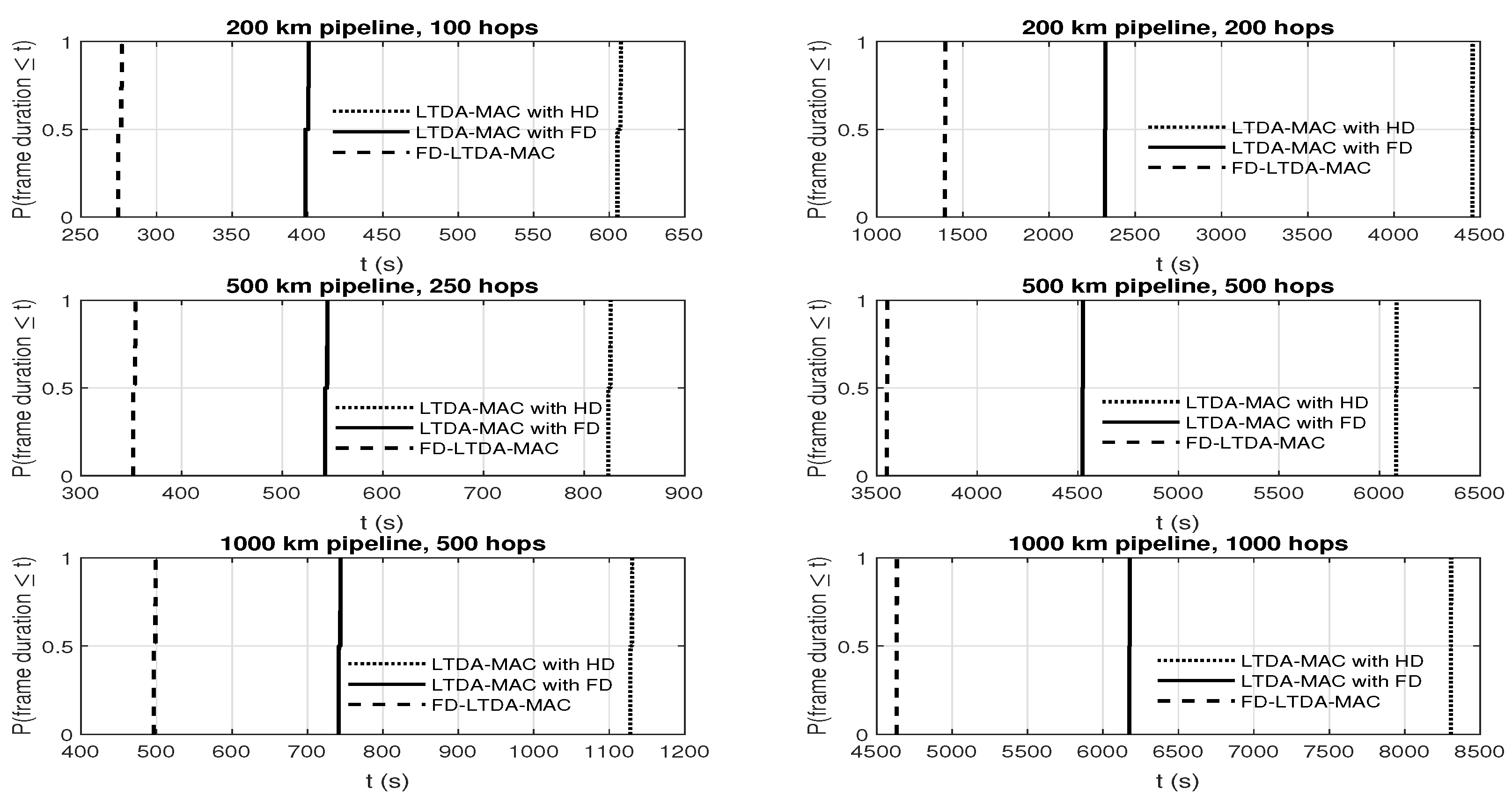
4.3. Large Scale Scenarios: 200, 500, and 1000 km Pipelines
Large scale network scenarios include pipelines that span from 200 km to 1000 km. The achieved frame durations are presented in
Figure 13. The results show that monitoring intervals for LTDA-MAC and LTDA-MAC over FD are low as frame durations are very long (607 s to 4457 s and 404 s to 2326 s for LTDA-MAC and LTDA-MAC over FD, respectively). From
Figure 10, we can see that FD-LTDA-MAC compresses the frame durations to about 276 s–1399 s, thus providing much higher monitoring rates. Here, LTDA-MAC for the 1000 km pipeline may require up to 8000 seconds which may be impractical for some pipeline monitoring applications. Providing more regular monitoring for these longer pipelines may require high power and longer range costly acoustic modems, however, FD-LTDA-MAC on scenarios configured with 2 km sensing range acoustic modems significantly reduce the monitoring rate to more acceptable values, such as 498 s for a 500-hop 1000 km pipeline scenario. It is thus important to state that there should be a need to monitor quite regularly along the pipeline, this is the main reason for more hops which is backed up by the low cost modem making a greater number of devices a reasonable prospect.
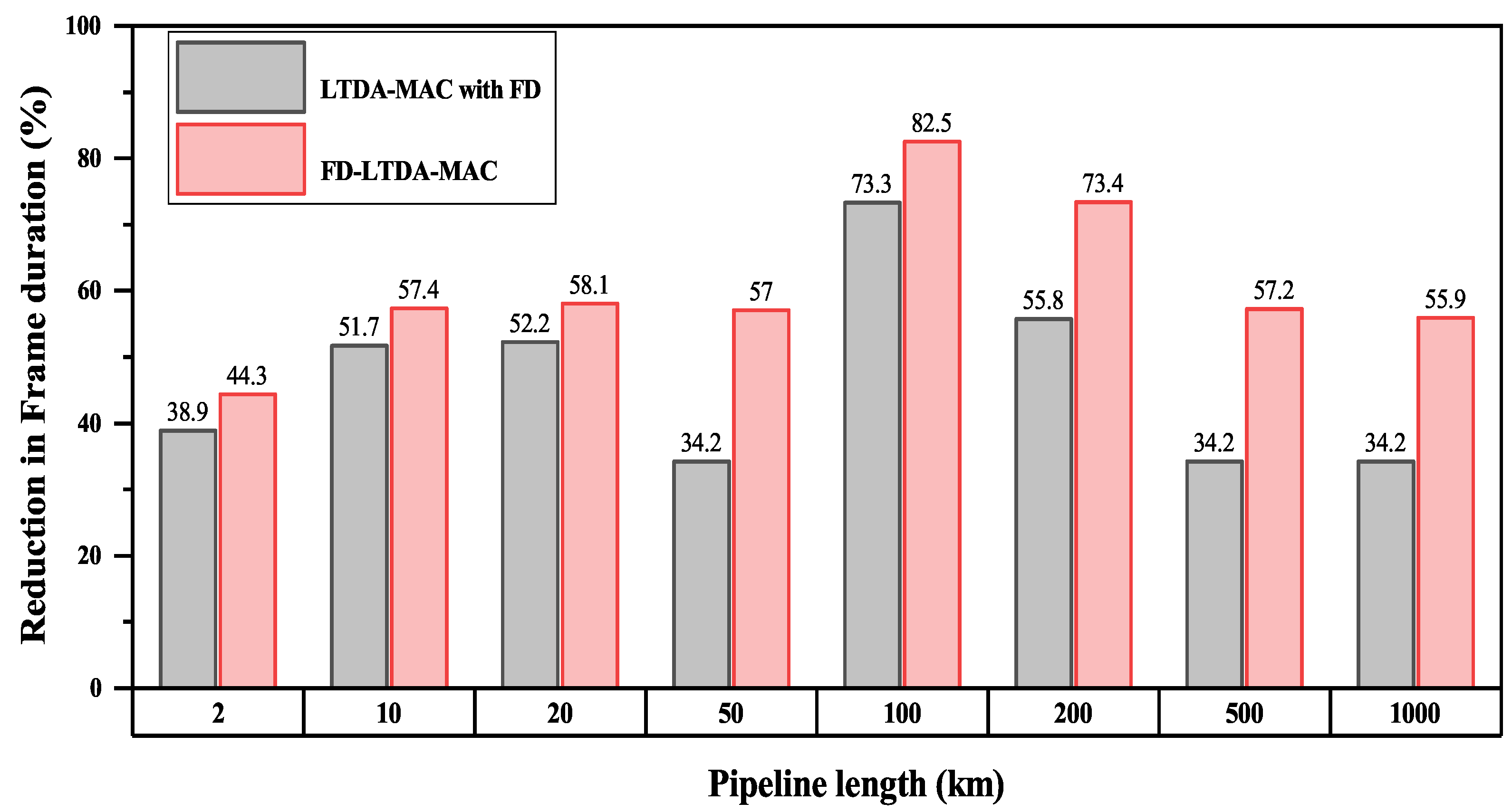
4.4. Percentage Reduction in Frame Duration
The percentage reduction in frame duration across the pipeline length for both LTDA-MAC with FD nodes and FD-LTDA-MAC compared to LTDA-MAC with half-duplex nodes is shown in
Figure 14. Although the monitoring rate improves across the pipeline length, the FD-LTDA-MAC shows higher percentage reduction in frame duration compared with LTDA-MAC and LTDA-MAC in FD. This is because the FD-LTDA-MAC is able to better exploit the spatial re-use. Consequently, FD-LTDA-MAC has better prospect with scalability than LTDA-MAC and LTDA-MAC in FD.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}