
Theoretical Investigation on the Impact of Two HDR Dampers on First Modal Damping Ratio of Stay Cable


Abstract
:1. Introduction
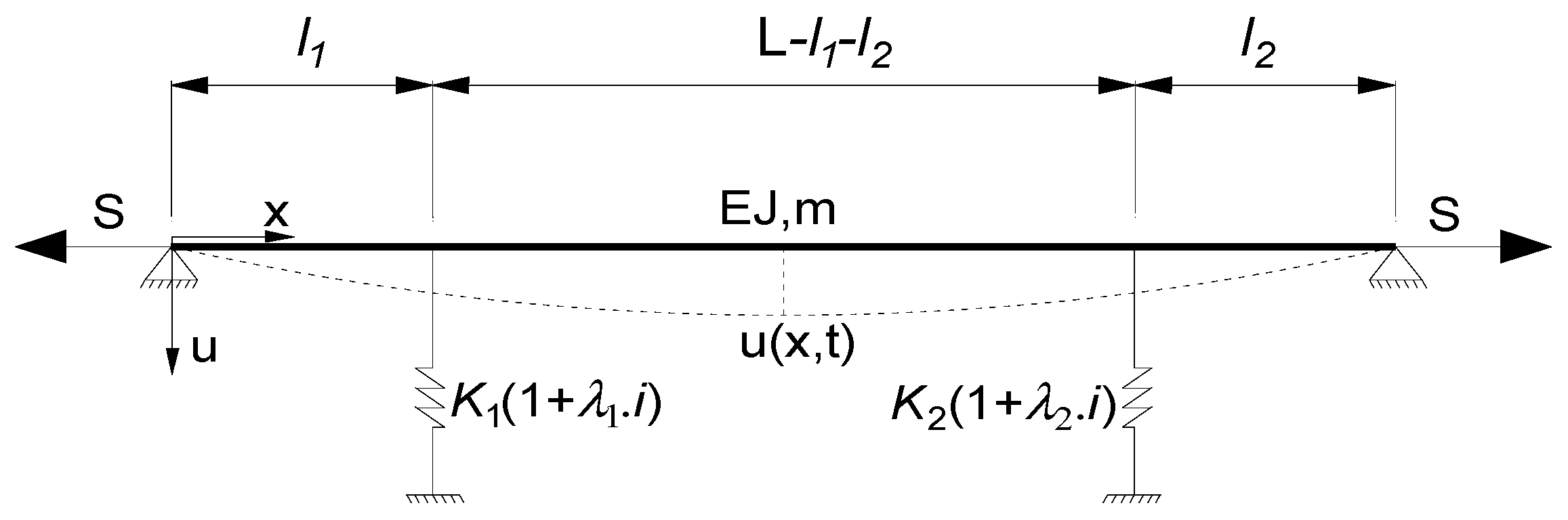
2. Governing Equation of Stay Cable with Two HDR Dampers
3. Results and Discussion
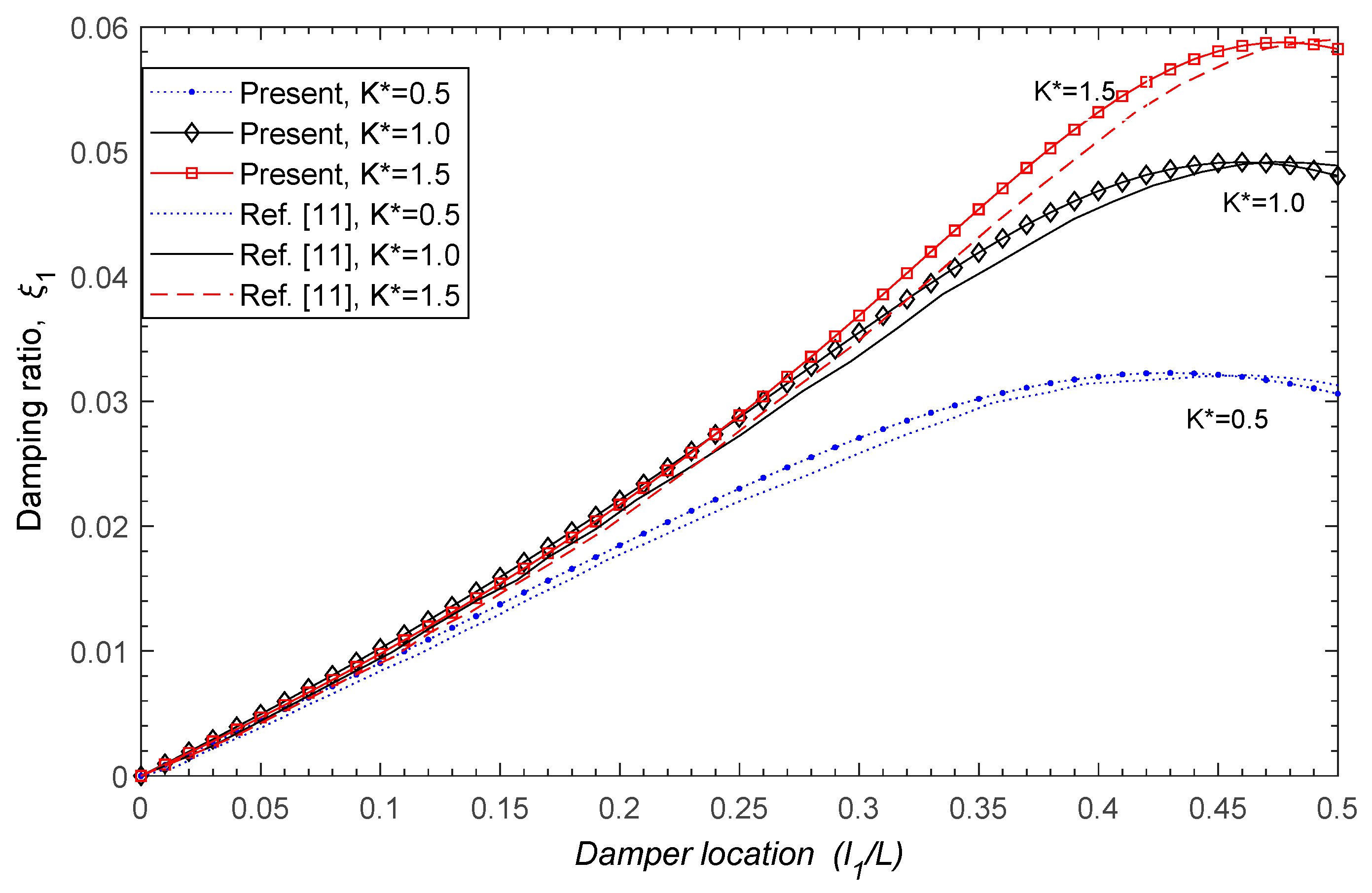
3.1. Model Validation
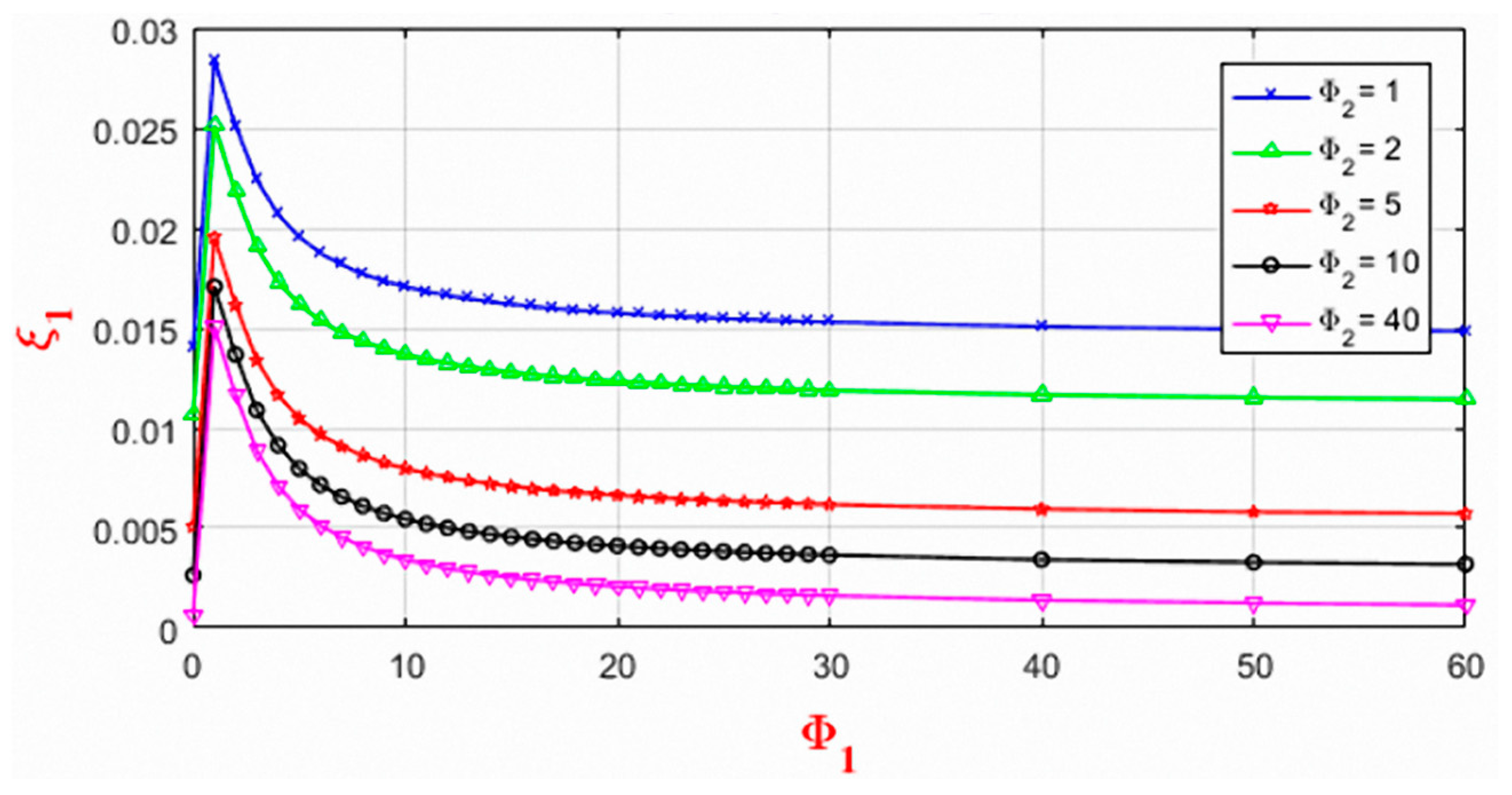
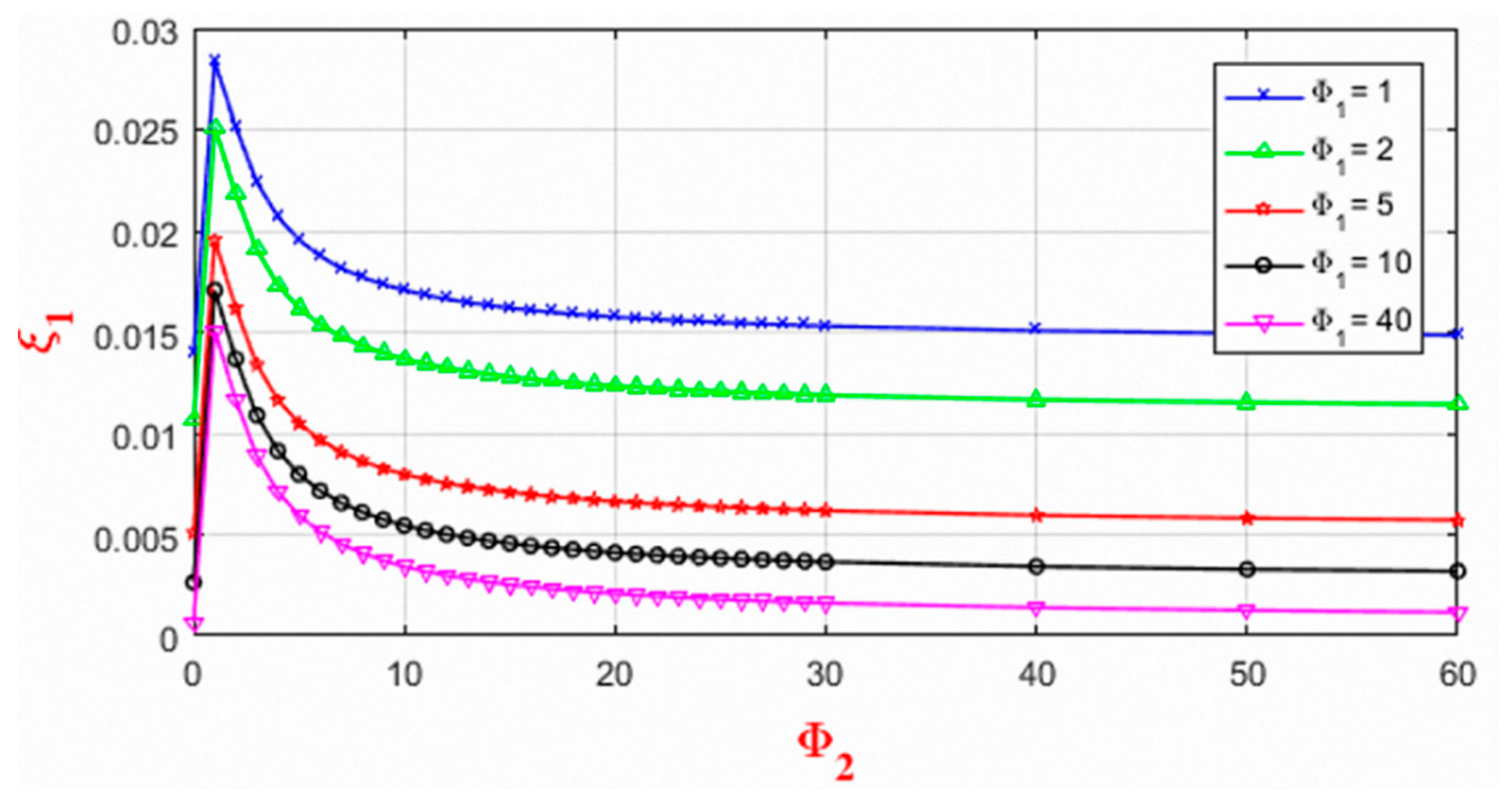
3.2. Effect of Spring Factor of HDR Dampers on First Modal Damping Ratio
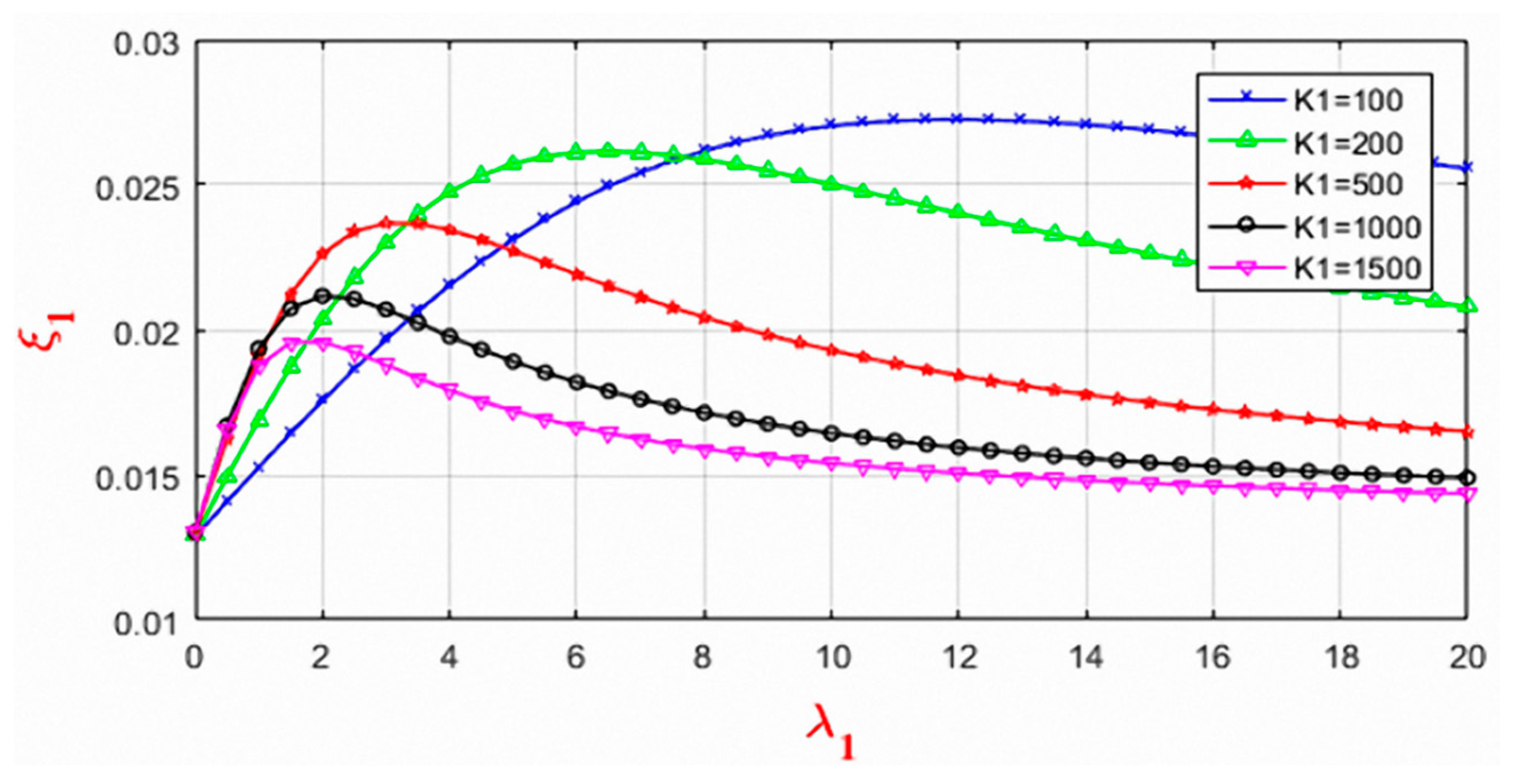
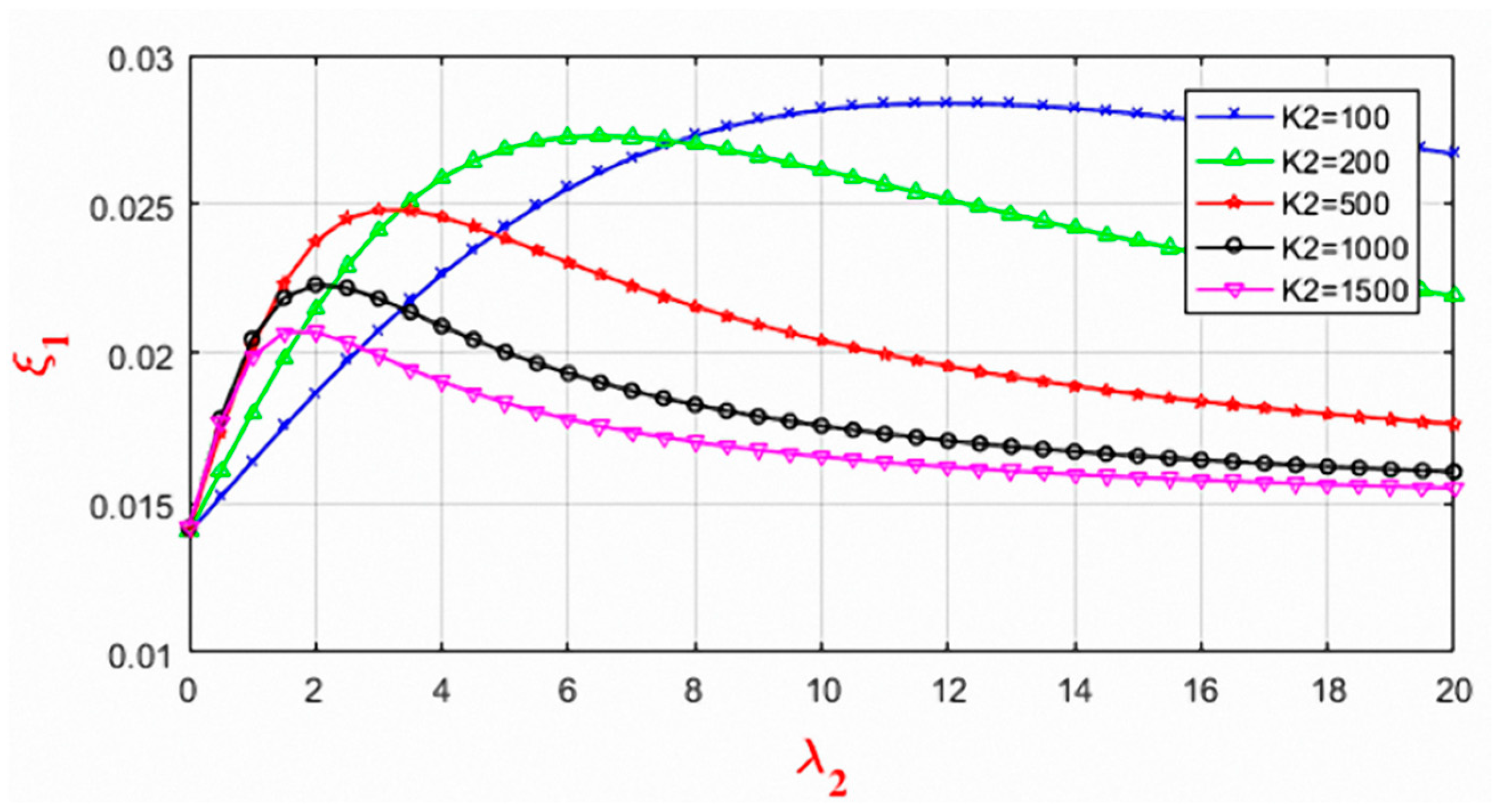
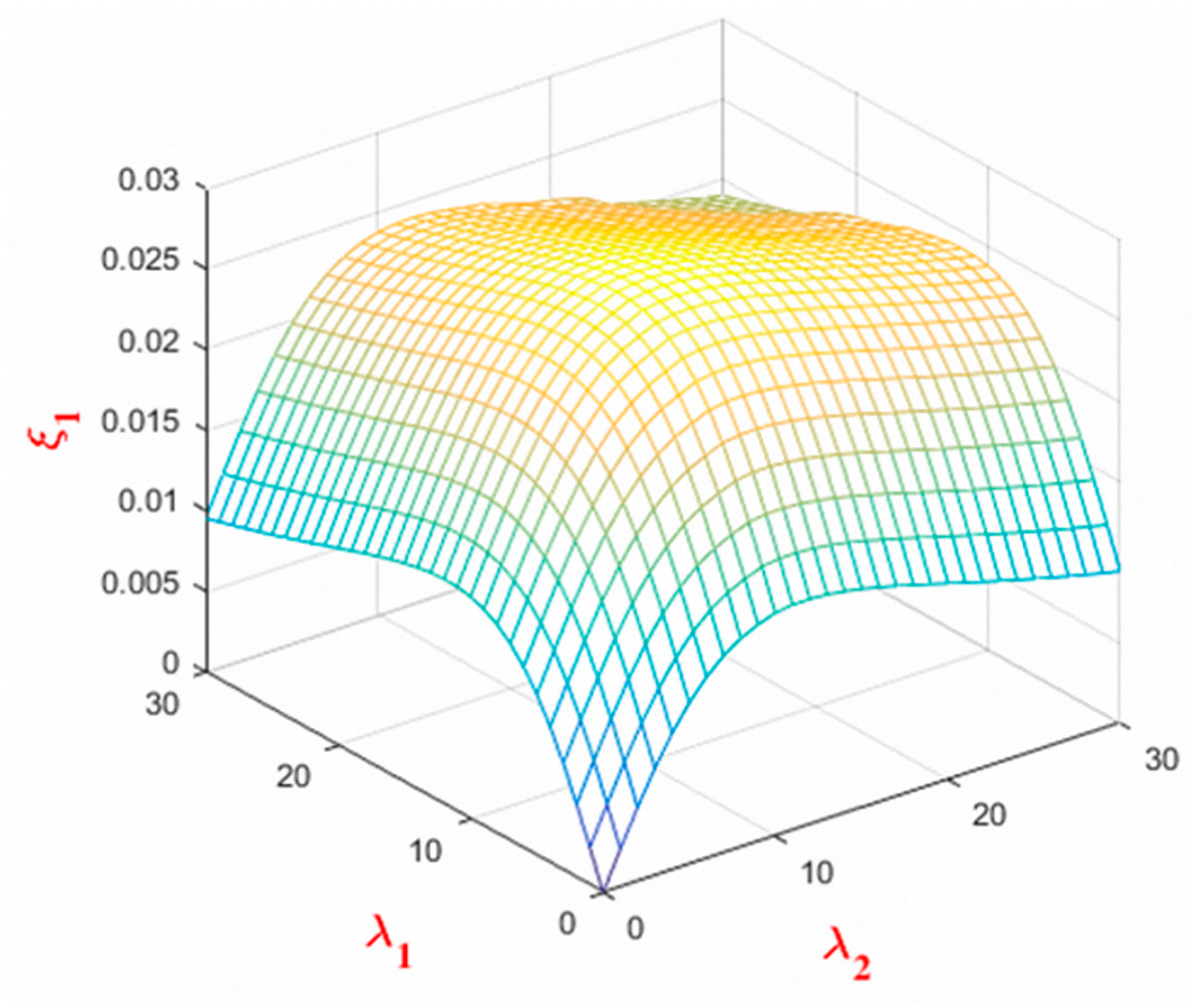
3.3. Impact of Loss Factor (λ) of HDR Dampers on First Modal Damping Ratio
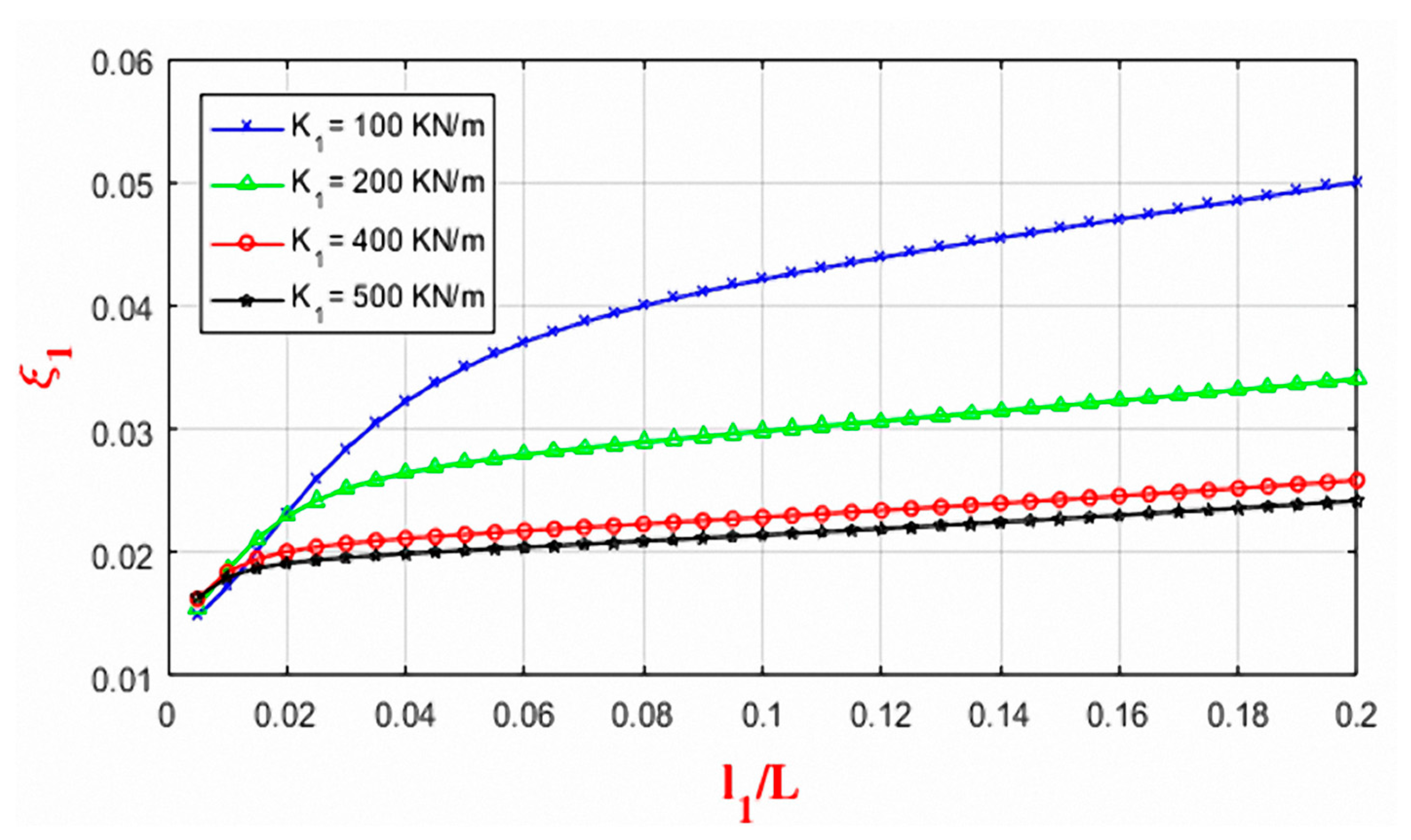
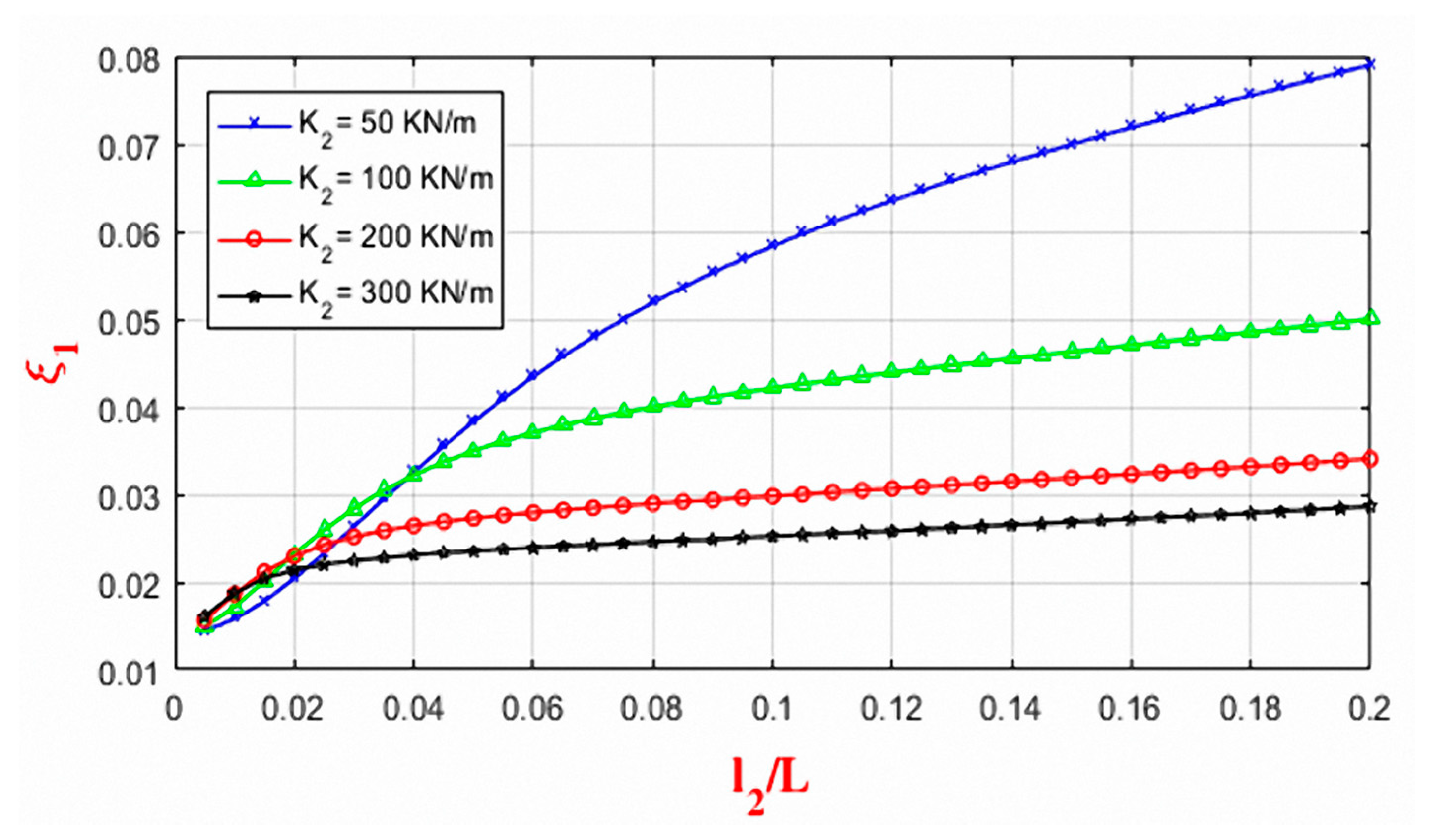
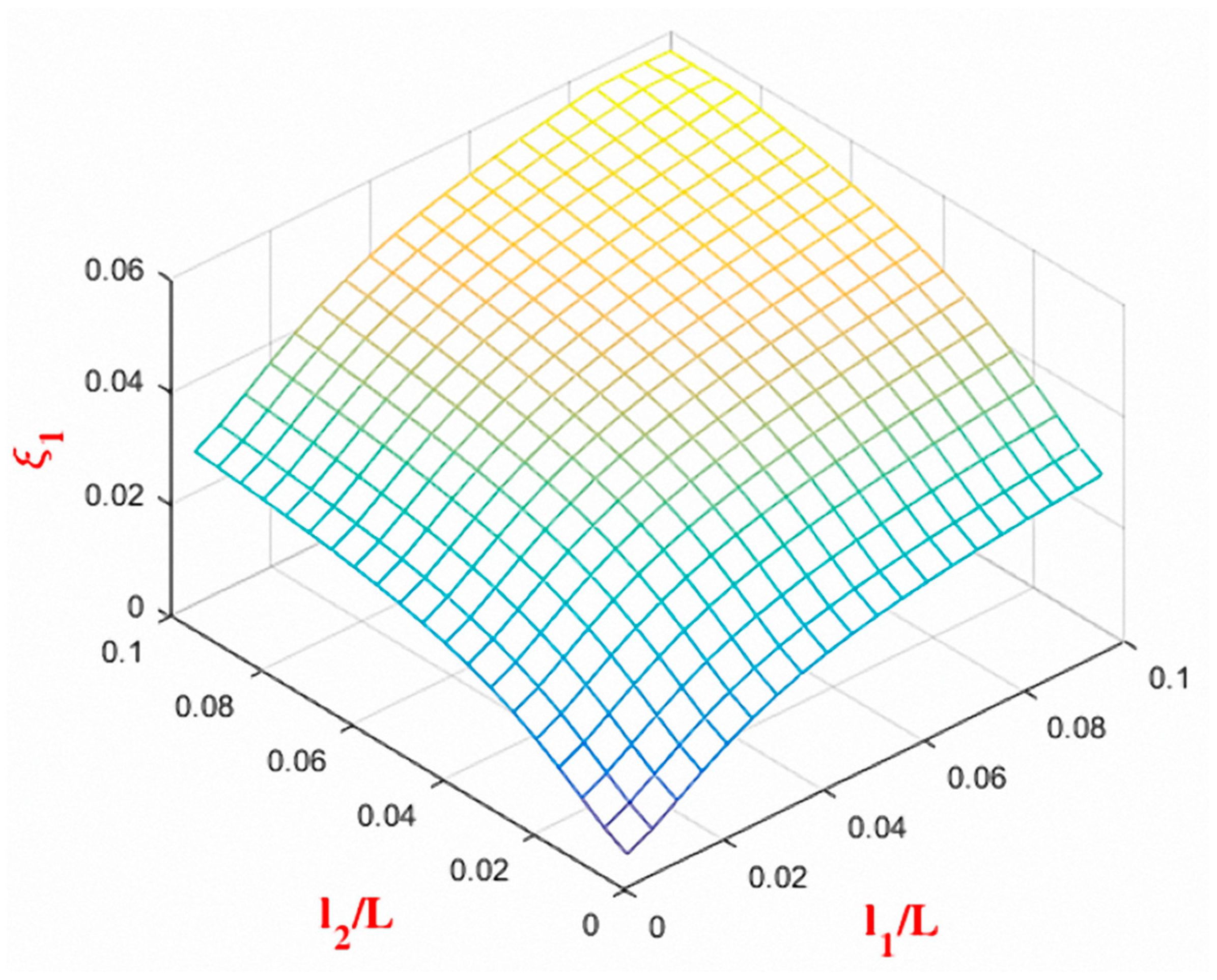
3.4. Effect of Installation Position of Two HDR Dampers (l1/L, l2/L)
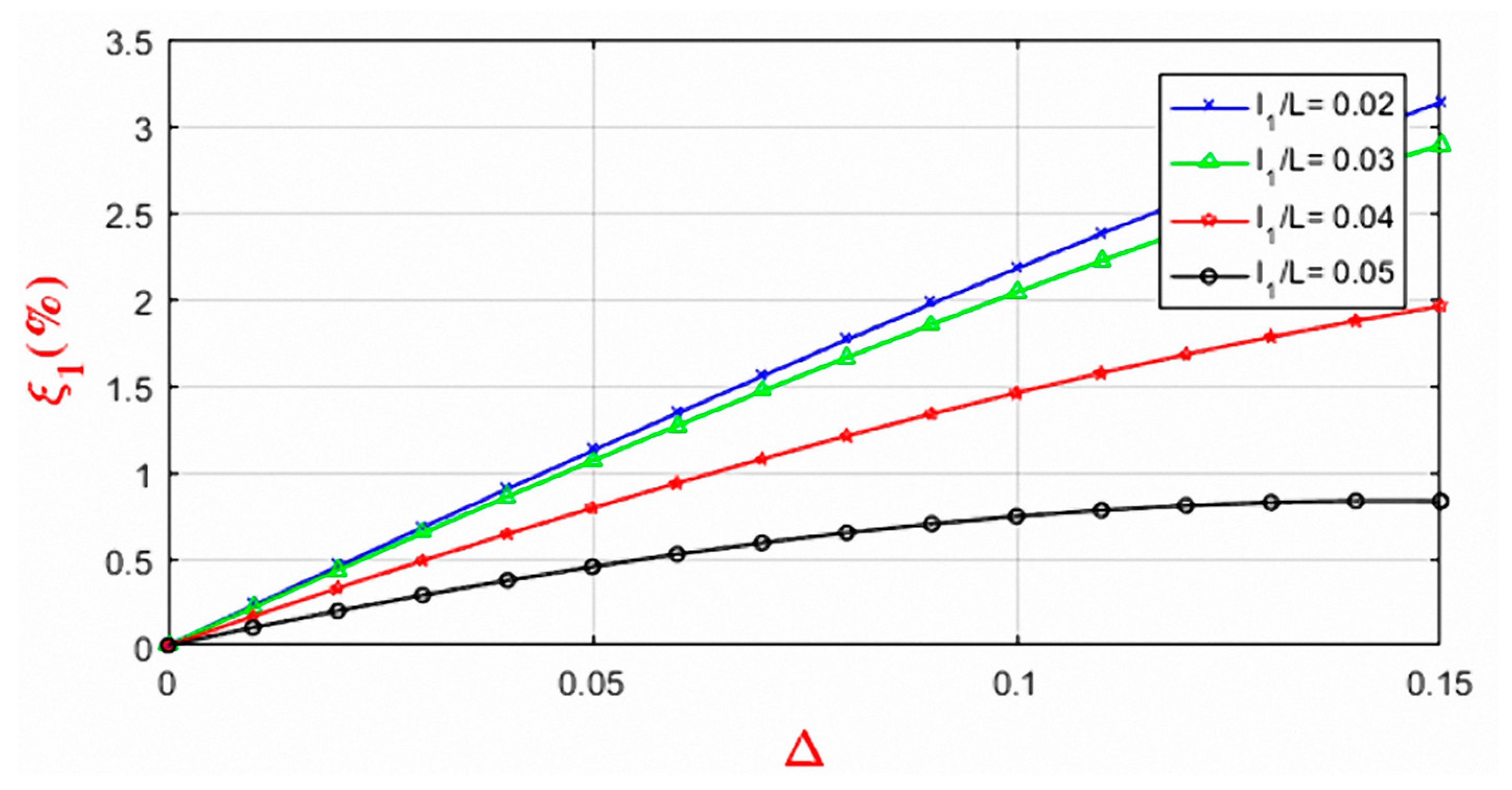
3.5. Effect of Bending Stiffness (EJ) of Stay Cable
3.6. Optimization Parameters for Two HDR Dampers
4. Conclusions
- Theoretical formulation for evaluating the modal damping ratio of stay cable with two HDR dampers has been proposed and validated.
- For a stay cable with fixed values of tension (S) and cable length (L), the optimum spring factor value of HDR dampers can be obtained when the parameter Φi (Ki.L/π.S) becomes 1.
- Loss factors play a significant role in the damping efficiency of HDR dampers. There is always an optimum value for the loss factor. By varying the spring factor, the optimum loss factor value can be figured out.
- Based on the present analysis, it is found that the damping ratio is directly proportional to the installation positions of HDR dampers. The larger the value of installation distance from the cable ends, the damping ratio also becomes higher. In addition, cable damping is also directly proportional to its bending stiffness.
- Present model can be an effective tool for evaluating the stay cable damping with two HDR-dampers. Designer can choose appropriate values among various design parameters to obtain the highest damping ratio.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hung, V.D.; Thao, N.D. A Further Study on Stay Cable Galloping under Dry Weather Condition. In Lecture Notes in Civil Engineering; Springer: Singapore, 2020; Volume 54. [Google Scholar] [CrossRef]
- Vo-Duy, H.; Nguyen, C.H. Mitigating Large Vibrations of Stayed Cables in Wind and Rain Hazards. Shock. Vib. 2020, 2020, 5845712. [Google Scholar] [CrossRef]
- Vo, H.D.; Katsuchi, H.; Yamada, H.; Nishio, M. A wind tunnel study on control methods for cable dry galloping. Front. Struct. Civ. Eng. 2016, 10, 72–80. [Google Scholar] [CrossRef]
- Pacheco, B.M.; Fujino, Y.; Sulekh, A. Estimation curve for modal damping in stay cables with viscous damper. J. Struct. Eng. 1993, 119, 1961–1979. [Google Scholar] [CrossRef]
- Takano, H.; Ogasawara, M.; Ito, N.; Shimosato, T.; Takeda, K.; Murakami, T. Vibrational damper for cables of the Tsurumi Tsubasa Bridge. J. Wind Eng. Ind. Aerodyn. 1997, 69–71, 807–818. [Google Scholar] [CrossRef]
- Nakamura, A.; Kasuga, A.; Arai, H. The effects of mechanical dampers on stay cables with high-damping rubber. Constr. Build. Mater. 1998, 12, 115–123. [Google Scholar] [CrossRef]
- Fujino, Y.; Hoang, N. Design Formulas for Damping of a Stay Cable with a Damper. J. Struct. Eng. 2008, 134, 269–278. [Google Scholar] [CrossRef]
- Main, J.A.; Jones, N.P. Free Vibrations of Taut Cable with Attached Damper. I: Linear Viscous Damper. J. Eng. Mech. 2002, 128, 1062–1071. [Google Scholar] [CrossRef] [Green Version]
- Hoang, N.; Fujino, Y. Analytical Study on Bending Effects in a Stay Cable with a Damper. J. Eng. Mech. 2007, 133, 1241–1246. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y. Combined Damping Effect of Two Dampers on a Stay Cable. J. Bridge Eng. 2008, 13, 299–303. [Google Scholar] [CrossRef]
- Cu, V.H.; Han, B. High-damping rubber damper for taut cable vibration reduction. Aust. J. Struct. Eng. 2005, 16, 283–291. [Google Scholar] [CrossRef]
- Le, L.X.; Katsuchi, H.; Yamada, H. Damping of Cable with HDR Damper Accounting for Restraint Boundary Conditions. J. Bridge Eng. 2020, 25, 04020105. [Google Scholar] [CrossRef]
- de Sá Caetano, E. Cable Vibrations in Cable-Stayed Bridges, 9th ed.; IABSE (International Association for Bridge and Structural Engineering): Zürich, Switzerland, 2007. [Google Scholar]
- Krenk, S. Vibrations of a taut cable with an external damper. J. Appl. Mech. 2000, 67, 772–776. [Google Scholar] [CrossRef]
- Chen, L.; Sun, L.; Nagarajaiah, S. Cable vibration control with both lateral and rotational dampers attached at an intermediate location. J. Sound Vib. 2016, 377, 38–57. [Google Scholar] [CrossRef]
- Zhou, P.; Li, H. Modeling and control performance of a negative stiffness damper for suppressing stay cable vibrations. Struct. Control Health Monit. 2016, 23, 764–782. [Google Scholar] [CrossRef]
- Cu, V.H.; Han, B.; Pham, D.H. Tuned mass-high damping rubber damper on a taut cable. KSCE J. Civ. Eng. 2017, 21, 928–936. [Google Scholar] [CrossRef]
- Di, F.; Sun, L.; Chen, L. Suppression of vortex-induced high-mode vibrations of a cable-damper system by an additional damper. Eng. Struct. 2021, 242, 112495. [Google Scholar] [CrossRef]
- Caracoglia, L.; Jones, N.P. Damping of taut-cable systems: Two dampers on a single stay. J. Eng. Mech. 2007, 133, 1050–1106. [Google Scholar] [CrossRef]
- Xu, Y.L.; Yu, Z. Mitigation of three-dimensional vibration of inclined sag cable using discrete oil dampers. II: Application. J. Sound Vib. 1998, 214, 675–693. [Google Scholar] [CrossRef]
- Tabatabai, H.; Mehrabi, A.B. Design of mechanical viscous dampers for stay cables. J. Bridge Eng. 2000, 5, 114–123. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Vo, D.H. A Study on Combination of Two Friction Dampers to Control Stayed-cable Vibration under considering its Bending Stiffness. Lect. Notes Civ. Eng. 2020, 54, 87–93. [Google Scholar]
- Di, F.; Sun, L.; Chen, L. Cable vibration control with internal and external dampers: Theoretical analysis and field test validation. Smart Struct. Syst. 2020, 26, 575–589. [Google Scholar]
- Zhou, H.; Xiang, N.; Huang, X.; Sun, L.; Xing, F.; Zhou, R. Full-scale test of dampers for stay cable vibration mitigation and improvement measures. Struct. Monit. Maint. 2018, 5, 489–506. [Google Scholar]
- Lu, L.; Duan, Y.F.; Spencer, B.F., Jr.; Lu, X.; Zhou, Y. Inertial mass damper for mitigating cable vibration. Struct. Control Health Monit. 2017, 24, e1986. [Google Scholar] [CrossRef]
- Wang, Z.H.; Xu, Y.W.; Gao, H.; Chen, Z.Q.; Xu, K.; Zhao, S.B. Vibration control of a stay cable with a rotary electromagnetic inertial mass damper. Smart Struct. Syst. 2019, 23, 627–639. [Google Scholar]
- Huang, Z.; Hua, X.; Chen, Z.; Niu, H. Performance evaluation of inerter-based damping devices for structural vibration control of stay cables. Smart Struct. Syst. 2019, 23, 615–626. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Validation Metrics | K* = 1.5 | K* = 1.0 | K* = 0.5 |
|---|---|---|---|
| CC | 0.9997 | 0.9994 | 0.9992 |
| RMSE | 0.0014 | 0.0011 | 0.0007 |
| EMAGE | 0.0002 | 0.0002 | 0.0001 |
| Φ2 | 1 | 2 | 5 | 10 | 40 |
|---|---|---|---|---|---|
| ξ1max | 0.0284 | 0.0251 | 0.0195 | 0.0171 | 0.0151 |
| Φ1 | 1 | 1 | 1 | 1 | 1 |
| Φ1 | 1 | 2 | 5 | 10 | 40 |
|---|---|---|---|---|---|
| ξ1max | 0.0284 | 0.0251 | 0.0195 | 0.0171 | 0.0151 |
| Φ2 | 1 | 1 | 1 | 1 | 1 |
| K1 | 100 | 200 | 500 | 1000 | 1500 |
|---|---|---|---|---|---|
| ξ1max | 0.0284 | 0.0273 | 0.0248 | 0.0223 | 0.0207 |
| λ1 | 12 | 6 | 3 | 2 | 1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, D.T.; Vo, D.H.; Haque, M.N. Theoretical Investigation on the Impact of Two HDR Dampers on First Modal Damping Ratio of Stay Cable. Appl. Sci. 2021, 11, 10985. https://doi.org/10.3390/app112210985
Nguyen DT, Vo DH, Haque MN. Theoretical Investigation on the Impact of Two HDR Dampers on First Modal Damping Ratio of Stay Cable. Applied Sciences. 2021; 11(22):10985. https://doi.org/10.3390/app112210985
Chicago/Turabian StyleNguyen, Duy Thao, Duy Hung Vo, and Md. Naimul Haque. 2021. "Theoretical Investigation on the Impact of Two HDR Dampers on First Modal Damping Ratio of Stay Cable" Applied Sciences 11, no. 22: 10985. https://doi.org/10.3390/app112210985
APA StyleNguyen, D. T., Vo, D. H., & Haque, M. N. (2021). Theoretical Investigation on the Impact of Two HDR Dampers on First Modal Damping Ratio of Stay Cable. Applied Sciences, 11(22), 10985. https://doi.org/10.3390/app112210985