
Experimental Research on Braking Feedback and Taxiing Feedback System of New Energy Vehicles


Abstract
:1. Introduction
2. New Energy Vehicle Feedback-Related Technology Research
2.1. Research on the Braking Feedback of New Energy Vehicles
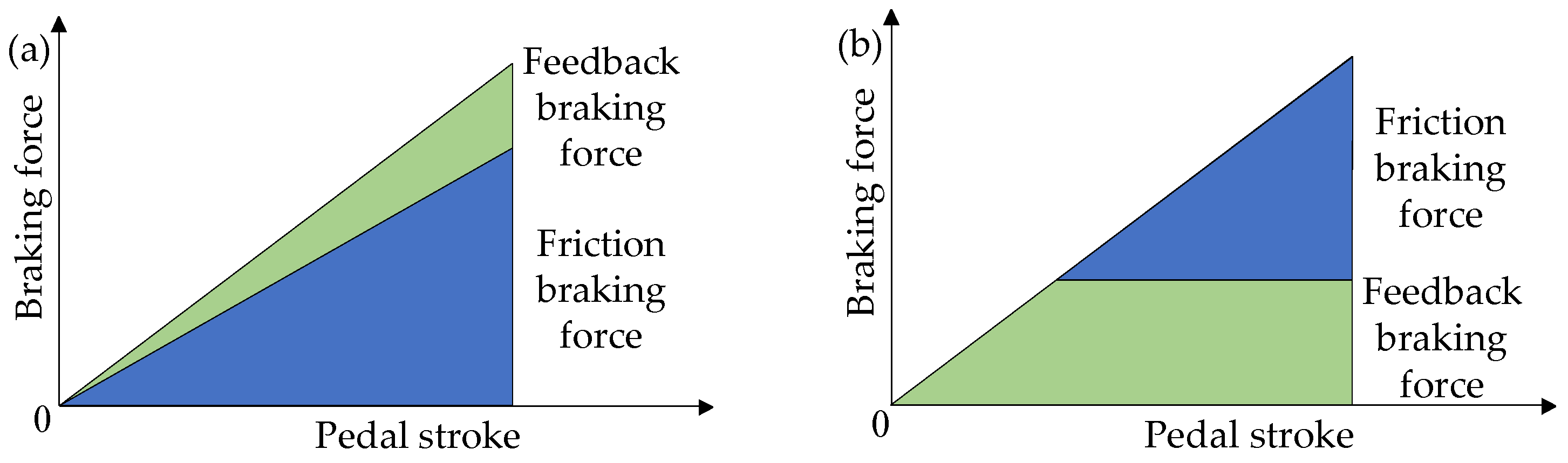
2.1.1. Stacking Type
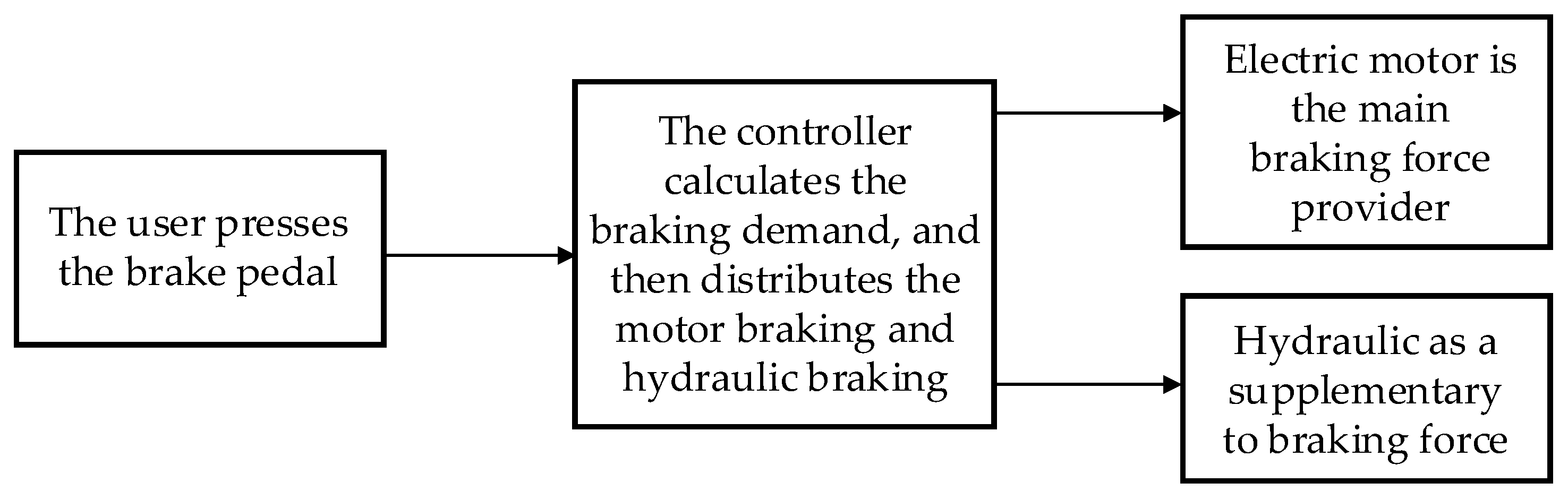
2.1.2. Coordination
2.2. Study of a New Energy Vehicle Coasting Feedback System
2.2.1. Double Pedal Control Type
2.2.2. Single Pedal Control Type
3. Complete Vehicle Integration and Test System for Brake Energy Recovery System
3.1. Test Subjects
3.1.1. Pure Electric City Bus
3.1.2. Hybrid City Bus
3.2. Brake Energy Recovery System Integrated into the Whole Vehicle
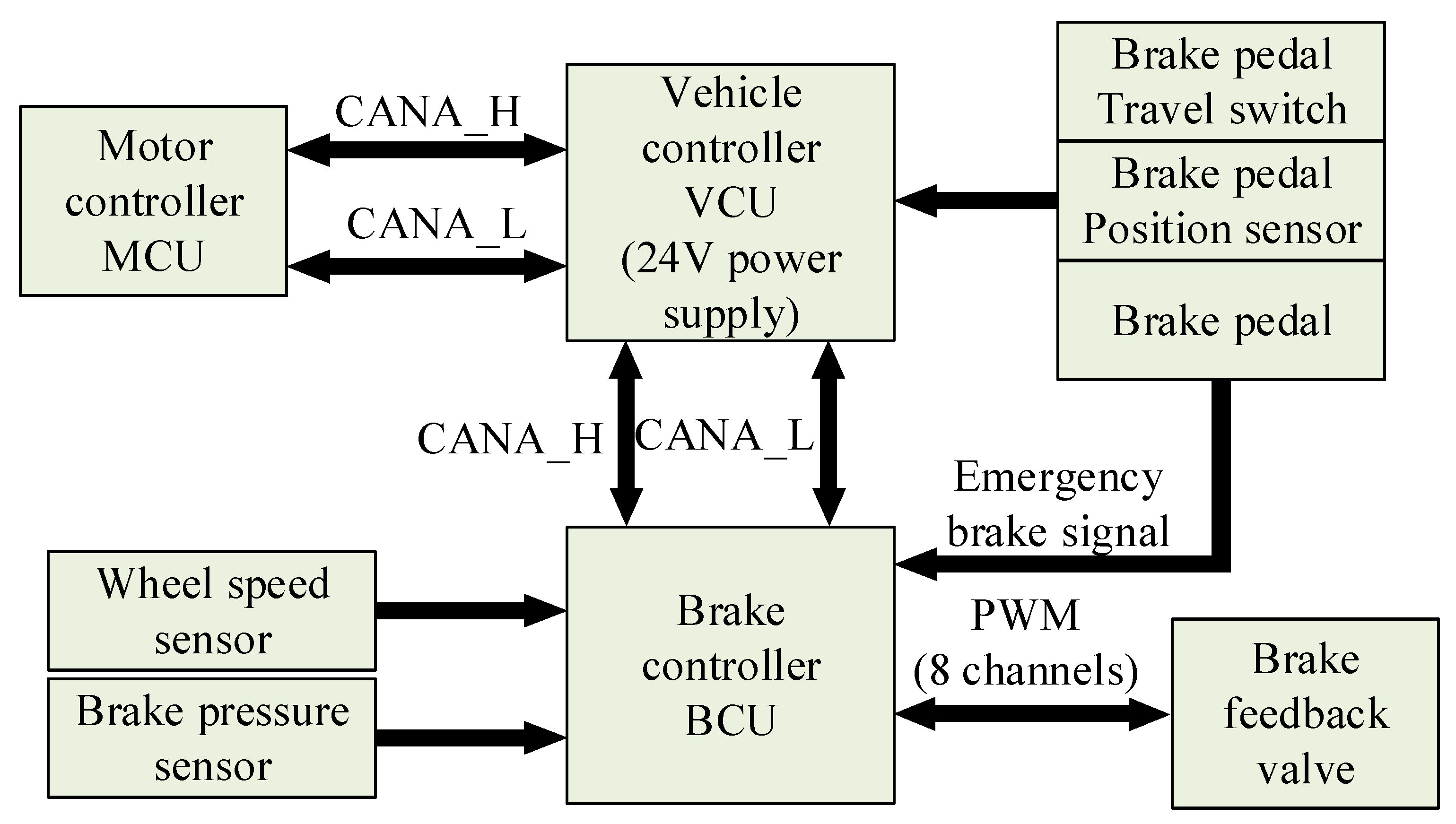
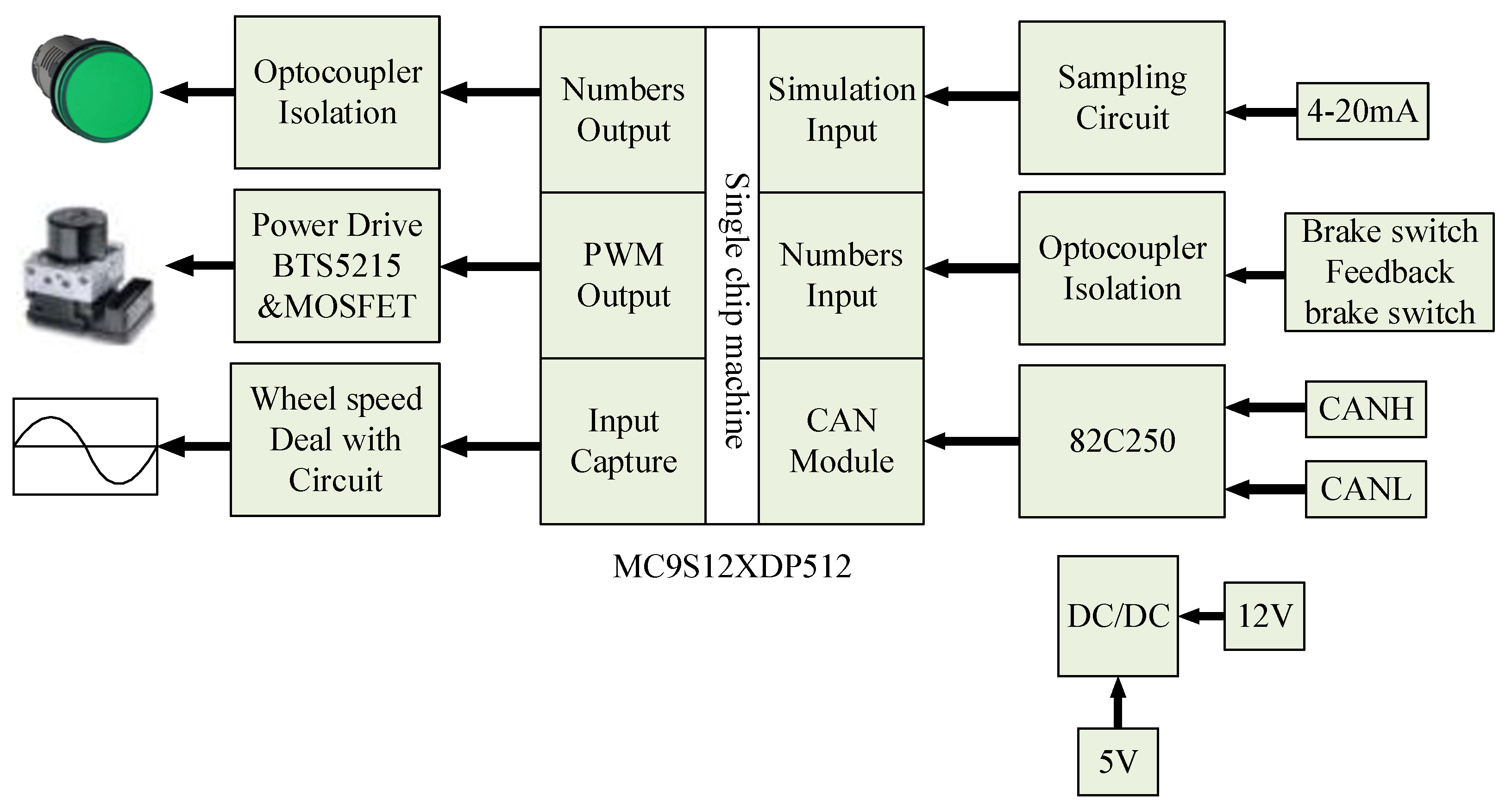
3.3. Real Vehicle Test System
3.4. Brake Energy Recovery System Energy Economy Test Results
3.4.1. Comparison of Coordinated and Stacked Braking Energy Recovery Strategies
3.4.2. Comparison of the Coasting Braking Feedback Strategy and Pedal-Free Stroke Strategy
4. Conclusions
- The real vehicle verification of different models and driving conditions can be carried out under the different braking energy recovery control strategies and taxiing feedback strategies proposed in this paper. The effects of the superposition and coordinated braking energy feedback strategy and energy recovery strategy under taxiing condition on vehicle energy consumption can be further discussed;
- In terms of hardware in the loop test bench, the pneumatic braking test bench and the electric drive system dynamics test bench can be integrated to be realized simultaneously in the loop test of a friction braking system and electric drive/braking system. It lays the foundation for further research on different strategies and schemes of electric vehicle energy recovery;
- In addition, in the future, we are considering for the next step of testing the use of collected energy for the start of movement of those same vehicles to calculate how much petroleum fuel can be saved when certain cities reach 10%, 50%, or 90% of their hybrid bus fleets and to conduct a study on the total cost of oil and electricity;
- Improving the range of new energy vehicles is not only about braking energy recovery and coasting energy recovery. Wireless charging, hybrid charging, and photovoltaic charging can also provide energy to the vehicle while it is running.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.S.; Tan, J.W. Green traffic-oriented heavy-duty vehicle emission characteristics of China VI based on portable emission measurement systems. IEEE Access 2020, 8, 106639–106647. [Google Scholar] [CrossRef]
- Liu, Y.S.; Ge, Y.S.; Tan, J.W.; Fu, M.L.; Asad, N.S.; Li, L.Q.; Ji, Z.; Ding, Y. Emission characteristics of offshore fishing ships in the Yellow Bo Sea, China. J. Environ. Sci. 2018, 65, 83–91. [Google Scholar] [CrossRef]
- Tan, X.M.; Li, T.Y. Analysis of challenges and opportunities in the development of new energy vehicle battery industry from the perspective of patents. IOP Conf. Ser. Earth Environ. Sci. 2021, 632, 032049. [Google Scholar] [CrossRef]
- Naoui, M.; Flah, A.; Zaafouri, I.; Mohit, B.; Ghoneim, S.S.M.; Mahrous, A. The impact of coil position and number on wireless system performance for electric vehicle recharging. Sensors 2021, 21, 4343. [Google Scholar] [CrossRef]
- Habib, K.; Aymen, F.; Naoui, M.; Majed, A.; Mohit, B.; Shailendra, M.; Naveen, K.S.; Sunil, K.S. Increasing electric vehicle autonomy using a photovoltaic system controlled by particle swarm optimization. IEEE Access 2021, 9, 72040–72054. [Google Scholar]
- Naoui, M.; Aymen, F.; Ben, H.M. Inductive charger efficiency under internal and external parameters variation for an electric vehicle in motion. Int. J. Powertrains 2019, 8, 343–358. [Google Scholar]
- Flah, A. Internal fuzzy hybrid charger system for a hybrid electrical vehicle. J. Energy Resour. Technol. 2018, 140, 12003–12008. [Google Scholar]
- Zhu, Y.Y.; Hao, W.; Zhen, C.C. Regenerative braking control under sliding braking condition of electric vehicles with switched reluctance motor drive system. Energy 2021, 230, 120901. [Google Scholar] [CrossRef]
- Han, T.L.; Zeng, B.; Tong, Y.J. Theoretical study on energy recovery rate of regenerative braking for hybrid mining trucks with different parameters. J. Energy Storage 2021, 42, 103127. [Google Scholar] [CrossRef]
- Zhang, J.Z.; Li, Y.T.; Lv, C.; Yuan, T. New regenerative braking control strategy for rear-driven electrified minivans. Energy Convers. Manag. 2014, 82, 135–145. [Google Scholar]
- Lv, C.; Zhang, J.Z.; Li, Y.T.; Sun, D.S.; Yuan, Y. Hardware-in-the-loop simulation of pressure-difference-limiting modulation of the hydraulic brake for regenerative braking control of electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 649–662. [Google Scholar] [CrossRef]
- Mikolaj, B.; Marcin, P. Multiaspect measurement analysis of breaking energy recovery. Energy Convers. Manag. 2016, 127, 35–42. [Google Scholar]
- Tian, G.D.; Zhang, H.H.; Feng, Y.X.; Jia, H.F.; Zhang, C.Y.; Jiang, Z.G.; Li, Z.W.; Li, P.G. Operation patterns analysis of automotive components remanufacturing industry development in China. J. Clean. Prod. 2017, 164, 1363–1375. [Google Scholar] [CrossRef]
- Michael, P.; George, D.; Dennis, N.A. Development and use of a regenerative braking model for a parallel hybrid electric vehicle. SAE Pap. 2000, 14. [Google Scholar] [CrossRef]
- Samuel, F.; Jony, J.; Fabricio, L.S.; Ludmila, C.A.; Franco, G. Multi-objective optimization design and control of plug-in hybrid electric vehicle powertrain for minimization of energy consumption, exhaust emissions and artery degradation. Energy Convers. Manag. 2021, 234, 11309. [Google Scholar]
- Zhang, J.J.; Yang, Y.; Qin, D.T.; Fu, C.Y.; Cong, Z.P. Regenerative braking control method based on predictive optimization for four-wheel drive pure electric vehicle. IEEE Access 2020, 99, 1. [Google Scholar] [CrossRef]
- Tian, G.D.; Zhang, H.H.; Feng, Y.X.; Wang, D.Q.; Peng, Y.; Jia, H.F. Green decoration materials selection under interior environment characteristics: A grey-correlation based hybrid MCDM method. Renew. Sustain. Energy Rev. 2018, 81, 682–692. [Google Scholar] [CrossRef]
- Lv, C.; Wang, H.; Cao, D.P. High-precision hydraulic pressure control based on linear pressure-drop modulation in valve critical equilibrium state. IEEE Trans. Ind. Electron. 2017, 64, 7984–7993. [Google Scholar] [CrossRef] [Green Version]
- Eiji, N.; Masayuki, S.; Akira, S.; Akihiro, O.; Toshikazu, K. Development of electronically controlled brake system for hybrid vehicle. SAE Tech. Pap. 2002, 8. [Google Scholar] [CrossRef]
- Huang, S.; Zhou, C.J.; Yang, L.L.; Qin, Y.Q.; Huang, X.F.; Hu, B.W. Transient fault tolerant control for vehicle brake-by-wire systems. Reliab. Eng. Syst. Saf. 2016, 149, 148–163. [Google Scholar] [CrossRef]
- Fabio, T.; Matteo, C.; Giulio, P.; Sergio, M.S. Adaptive position–pressure control of a brake by wire actuator for sport motorcycles. Eur. J. Control 2014, 20, 79–86. [Google Scholar]
- Li, N.; Zhang, J.Z.; Li, C.; Gou, J.F.; Liu, Y.S. Research on the influence of the proportional ralve on the economy and safety of the electric bus through the braking energy recovery system. Energy Sources Part A Recovery Util. Environ. Eff. 2019, 10, 25–30. [Google Scholar]
- Nitesh, K.S.; Chaitali, K.; Sadhan, G. An implementation perspective of hybrid electric vehicle. J. Inf. Optim. Sci. 2019, 40, 1693–1708. [Google Scholar]
- Liu, Y.S.; Ge, Y.S.; Tan, J.W.; Wang, H.L.; Ding, Y. Research on ammonia emissions characteristics from light-duty gasoline vehicles. J. Environ. Sci. 2021, 106, 182–193. [Google Scholar] [CrossRef]
- Li, N.; Zhang, J.Z.; He, C.K. Research on the influence of air conditioning energy consumption on brake energy recovery contribution rate based on operating conditions. IOP Conf. Ser. Earth Environ. Sci. (EES) 2021, 2, 1–5. [Google Scholar] [CrossRef]
- José, H.; Luis, Q.; Michael, G.; Jenny, D. Comparison of three methods for constructing real driving cycles. Energies 2019, 12, 665. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.S.; Wang, H.L.; Li, N.; Tan, J.W.; Chen, D. Research on ammonia emissions from three-way catalytic converters based on small sample test and vehicle test. Sci. Total Environ. 2021, 795, 148926. [Google Scholar] [CrossRef]
- Francesc, C.; Roberto, Á.F. Predictive model for energy consumption of battery electric vehicle with consideration of self-uncertainty route factors. J. Clean. Prod. 2020, 276, 124–188. [Google Scholar]
- Zhao, X.; Ye, Y.M.; Ma, J.; Shi, P.L.; Chen, H. Construction of electric vehicle driving cycle for studying electric vehicle energy consumption and equivalent emissions. Environ. Sci. Pollut. Res. 2020, 27, 37395–37409. [Google Scholar] [CrossRef]
- Tian, G.D.; Liu, Y.M.; Ke, H.; Chu, J.G. Energy evaluation method and its optimization models for process planning with stochastic characteristics: A case study in disassembly decision-making. Comput. Ind. Eng. 2012, 63, 553–563. [Google Scholar] [CrossRef]
- Wawrzyniec, G.; Maciej, L. Theoretical analysis of electric vehicle energy consumption according to different driving cycles. IOP Conf. Ser. Mater. Sci. Eng. 2018, 23, 11–22. [Google Scholar]
- Li, N.; Zhang, J.Z.; Zhang, S.Y.; Hou, X.H.; Liu, Y.H. The influence of accessory energy consumption on evaluation method of braking energy recovery contribution rate. Energy Convers. Manag. 2018, 166, 545–555. [Google Scholar] [CrossRef]
- Tian, G.D.; Chu, J.W.; Liu, Y.M.; Ke, H.; Zhao, X.; Xu, G. Expected energy analysis for industrial process planning problem with fuzzy time parameters. Comput. Chem. Eng. 2011, 35, 2905–2912. [Google Scholar] [CrossRef]
- Sun, H.; Liu, Y.S.; Tan, J.W. Research on Testing Method of Oil Characteristic Based on Quartz Tuning Fork Sensor. Appl. Sci. 2021, 11, 5642. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value and Unit |
|---|---|
| Curb weight | 12,400 kg |
| Full load quality | 18,000 kg |
| Motor rated power | 100 kw |
| Main reducer reduction ratio | 6.2 |
| Battery capacity | 120 A·h |
| Maximum charging rate | 4 C |
| Speed | 69 km/h |
| Power | 150 kw |
| Parameter | Parameter Value and Unit |
|---|---|
| Curb quality | 12,000 kg |
| Full load quality | 18,000 kg |
| Motor rated power | 60 kw |
| Motor rated torque | 820 N·m |
| Main reducer reduction ratio | 6.166 |
| Maximum voltage of super capacitor | 550 V |
| Super capacitor capacity | 165 F |
| Speed | 69 km/h |
| Power | 170 kw |
| Working Condition | Fuel Consumption per Hundred Kilometers (L/100 km) | ||
|---|---|---|---|
| Traditional Internal Combustion Engine | Braking Energy Recovery | Braking Energy Recovery | |
| Drive | No Taxiing Feedback | Taxiing Feedback | |
| China’s typical city | 37.04 | 23.02 | 23.49 |
| bus conditions | |||
| Yutong working conditions | 38.53 | 32.03 | 25.34 |
| Working Condition | Fuel Consumption per Hundred Kilometers (L/100 km) | |
|---|---|---|
| No Taxiing Feedback | Taxiing Feedback | |
| China’s typical city | 37.85% | 36.58% |
| bus conditions | ||
| Yutong working conditions | 16.87% | 34.23% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Liu, Y.; Tan, S. Experimental Research on Braking Feedback and Taxiing Feedback System of New Energy Vehicles. Appl. Sci. 2021, 11, 11093. https://doi.org/10.3390/app112311093
Li N, Liu Y, Tan S. Experimental Research on Braking Feedback and Taxiing Feedback System of New Energy Vehicles. Applied Sciences. 2021; 11(23):11093. https://doi.org/10.3390/app112311093
Chicago/Turabian StyleLi, Ning, Yingshuai Liu, and Siyuan Tan. 2021. "Experimental Research on Braking Feedback and Taxiing Feedback System of New Energy Vehicles" Applied Sciences 11, no. 23: 11093. https://doi.org/10.3390/app112311093
APA StyleLi, N., Liu, Y., & Tan, S. (2021). Experimental Research on Braking Feedback and Taxiing Feedback System of New Energy Vehicles. Applied Sciences, 11(23), 11093. https://doi.org/10.3390/app112311093