1. Introduction
High impedance faults in electric power systems (EPS) represent a liability in regards to safety and reliability. High impedance faults (HIFs) arise when a connection is made between an energized conductor and a surface with high resistance that is not part of the EPS. Common surfaces that can lead to HIFs include trees, asphalt, concrete, sand, and grass [
1]. Significant damage to equipment, property, and even fatalities have been attributed to this phenomenon [
2]. Despite these significant implications, the problem of HIFs remains unsolved [
3]. One of the main challenges in this area is presented by the unique nature of HIFs [
4]: The nonlinear relationship between currents and voltages, the presence of electrical arcs, and most importantly the low current magnitudes. These characteristics make it difficult to detect HIF by the traditional means of over-current protection. A protection device on a heavily loaded feeder will most likely not operate in the presence of HIFs. On the other hand, choosing to set a protective device too close to the expected loading level can lead to nuisance tripping. To compound the problem even further, the dynamic behavior of both the fault and the load must be taken into account.
As a result of the clear limitations of over-current protection in the detection of HIFs, efforts have been made to find alternate solutions to this problem. Several techniques have been proposed in recent years, but a unified and general solution is yet to be accepted by the industry [
5]. Most techniques can be divided into the following groups: knowledge-based techniques, network topology based techniques, and apparent impedance-based techniques.
Knowledge-based techniques leverage data acquired by meters and utilize machine learning (ML) approaches to identify outliers [
6]. One of the drawbacks of these techniques is the reliance on meters, and the infrastructure necessary to process large amounts of data.
Methods based on network topology are somewhat similar to knowledge-based solutions in that they rely on metering [
7]. Meter sensors in key areas are deployed to create a network capable of detecting HIFs. This approach requires a significant investment in terms of equipment, installation and maintenance of meters. Moreover, this type of approach suffers from a lack of generality, which means that significant engineering is needed in real-life applications.
Transmission protection techniques have inspired researchers to develop solutions for HIFs based on methods such as Apparent Impedance. These techniques are appealing due to the relatively low investment cost and the familiarity of protection engineers with the underlying principle of impedance (distance) relaying. A significant obstacle these techniques face is the stochastic behavior of HIFs. Several of these solutions make the assumption that the impedance at the fault point is purely resistive, which would lead to a fault signature that is fairly linear and constant [
8]. These techniques were advanced by taking into account the non-linear behavior of an electrical arc. These models face two challenges: Being able to detect the change in impedance, and doing so in small time windows. Still, despite having multiple unresolved issues, impedance-based techniques have gone on to become accepted as the framework for the development of new HIF detection and location solutions [
9].
Solutions based on state estimators, such Weighted Least Squares (WLS) [
10,
11], have been proposed more recently. These solutions aim to detect HIFs by identifying statistical outliers during the estimation process. Estimation-based methods such as [
12] have been proposed in the time domain, as well as in the frequency domain as presented in [
8,
13]. In regards to state estimators for HIFs, frequency domain techniques appear to have greater momentum compared to time domain approaches due to reported advantages such as noise suppression and relative ease of implementation. Despite encouraging results produced by Frequency Domain Estimators, several limitations of this approach must be noted: First, there is a lack of a generalized solution, particularly in regards to the system’s topology, and secondly, the estimation of system parameters, including the fault itself, has not been standardized. Some of the solutions based on frequency domain estimators attempt to streamline the process by modeling and estimating a reduced number of parameters, which leads to marginal observability and near singular Jacobian matrices. Both of these lead to reduced redundancy and a possible magnification of errors [
1,
14]. Another important limitation of WSL estimators to be considered is that the vast majority of them only consider the residual of the error, which does not always represent the total error [
15,
16].
An approach based on neural networks is used in [
17], which derives estimates of the parameters of a feeder during fault conditions. The estimation is carried out in the time domain, and utilizes polynomial approximation techniques. This approach is hindered by assumptions related to the time-frame when measurements are taken and the location of the load [
18].
Recently, in [
19], the harmonic distortion generated during the fault is analyzed in the spectral domain. This solution detects HIFs by identifying parameter errors in the fundamental and the third harmonic through a WLS estimator. This technique yields a high rate of detection and an accurate location of the fault, however, implementation presents serious challenges as some of the parameters required to solve the estimator must be calculated manually.
Finally, solutions based on WAMs technology were utilized by studies in [
20,
21,
22]. In [
20], a Fourier Series based approach is proposed in which parameters are estimated from harmonics measured by PMUs. This approach is similar to other frequency domain approaches, and although the idea seems promising, implementation could be an issue due to short windows of time when measurements must be made, and the use of specialized measurements and parameters that could lead to singular matrices. It must also be noted that [
20] was not evaluated in a recognized environment such as an
Test Feeder. In [
21], a combination of measurements and simulations are used to locate faults. As mentioned before, the need to simulate parameters leads to solutions that are not general and can be difficult to implement. In [
22], measurements from multiple sections of a line are utilized to derive a model based on symmetrical components with emphasis on line capacitance to detect and locate faults. The results were interesting; however, it was noted that the performance of the algorithm is affected by the length of the line, and the solution was not tested with resistances beyond 100
. Moreover, this solution appears to be geared towards systems with underground cables.
This review of the literature has lead to the following conclusions:
Most acceptable solutions are based on the Apparent Impedance framework.
The Time Domain vs. Frequency Domain debate is still open.
Most solutions focus on modeling and identifying specific aspects of HIFs.
Most solutions suffer from a lack of generality, meaning that manual adjustments have to be made each time the solution is deployed.
In view of the limitations of existing solutions and the current state of smart grid technology, this work presents a unified, dynamic hybrid data-driven and analytical-based model, which advances the state-of-the-art of HIFs detection in the following ways:
Presents a data-driven and analytical model, based on novel statistical metrics, for the identification of eigenvalue drift patterns.
Temporal characteristics of a real-life power system are modeled through autonomously generated protection zones in the eigenvalue space.
The remainder of this paper is organized as follows.
Section 2 provides theoretical background on state estimation, clustering techniques, power system protection, and eigenvalue properties.
Section 3 presents the unified model with the accompanying metrics formulated for this work. Test results of a case study are shown in
Section 4. Finally,
Section 5 presents conclusions and remarks on the future direction of this work.
3. HIF Detection in Eigenvalue Space
Merely a decade ago, proposing a solution based on advanced metering at multiple ends of a line, with the end goal of estimating eigenvalues, would have been met with significant scepticism regarding the feasibility of the solution’s implementation. However, due to increased integration of synchrophasor technology into the grid, solutions based on Wide Area Measurements (WAMS) made possible by Phasor Measurement Units (PMUs) are gaining momentum. Even at the distribution level, smaller and cheaper units called Micro-PMUs are being added to the smart grid [
24].
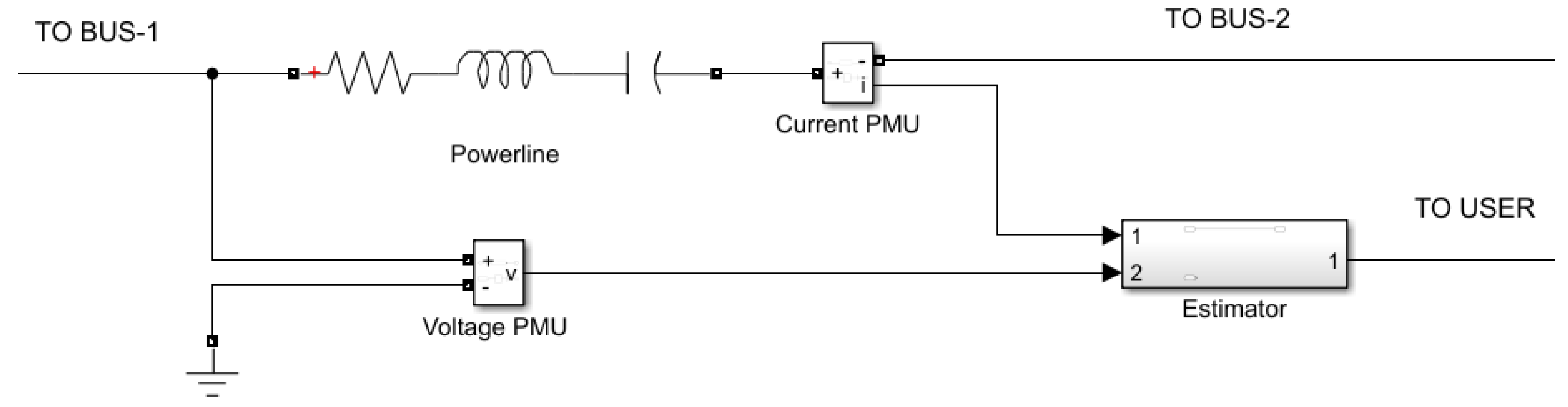
This work envisions PMUs, as the metering devices collecting information for the eigenvalue estimation step. This is due to their high sampling rates (120 Hz), and wide area measuring capabilities. These two characteristics are critical as higher sampling rates increase the robustness of the estimates, while the ability to operate over a wide area means that this solution could be implemented on lines of varying length.
Figure 3 illustrates the configuration of the system proposed in this work.
One of the key features that distinguishes this work from other solutions is that this method doesn’t attempt to identify HIFs or their characteristics, but instead focuses on identifying deviations in the Eigenvalue Space (ES). Identifying HIFs by focusing on the characteristics of the fault presents an immense engineering challenge, but this is a challenge that can be avoided altogether.
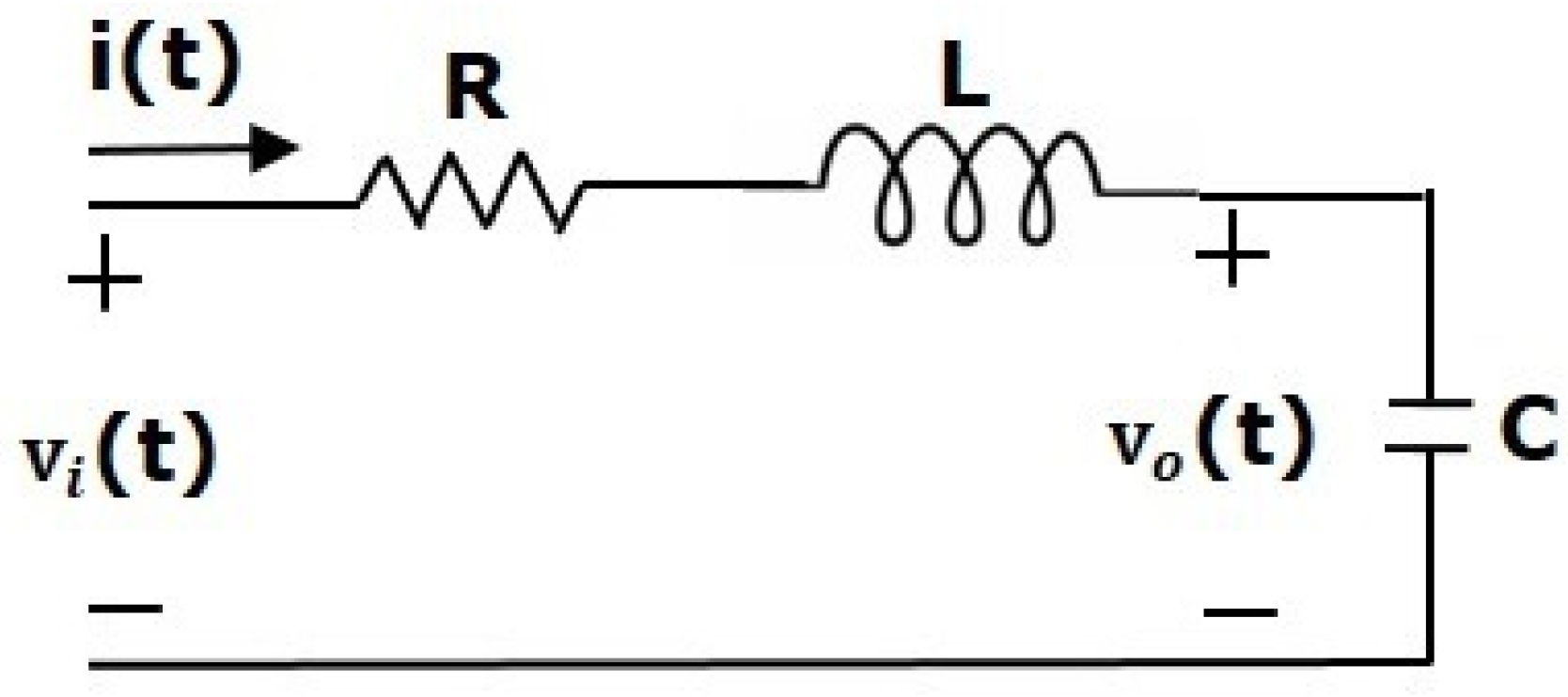
As mentioned in the previous section, each powerline has a unique set of eigenvalues determined by the parameters illustrated in
Figure 4, and these eigenvalues are sensitive to changes in impedance, such as the deviations seen during a fault.
Therefore, instead of trying to predict the magnitude and order of the harmonics generated by an electrical arc, or how a highly resistive surface will change the angle of an apparent impedance, this works presents a method that establishes a baseline of acceptable values in the ES and makes decisions when eigenvalues drift outside of these zones. Focusing on deviations from a baseline allows this solution to:
Utilize alternative means of monitoring, in this case eigenvalues.
Create a significantly higher degree of generalization as the solution can applied to just about any system with virtually zero human interaction (other than the installation of the metering infrastructure).
3.1. Framework for Eigenvalue Identification
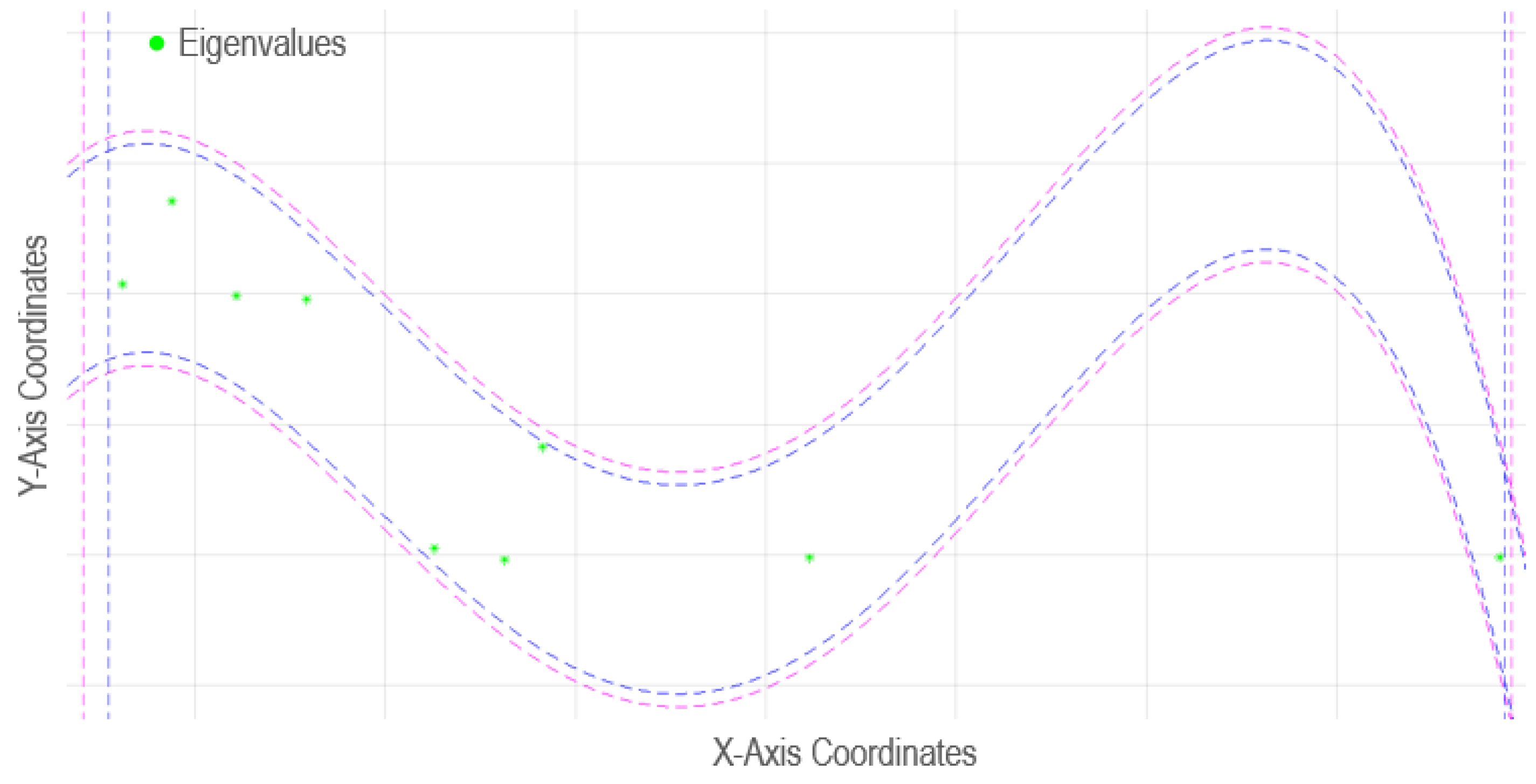
The first step of this solution is to estimate the eigenvalues of the powerline being monitored.
Figure 5 is an example of the estimation result. Using PMUs, voltage readings from one end of the line can be integrated with current measurements at the opposite end of the line. These two measurements are then sent to an estimator. Physically, the estimator can reside at either a centralized location, such as a control center or database, or at a secure distributed location such as a substation. This versatility regarding the location of the equipment adds to the generality of the solution.
As discussed in the previous section, Subspace Estimation was used to realize the eigenvalues of the system, however, other algorithms can be used to process the data collected by the PMUs and estimate the eigenvalues. The choice of the estimation algorithm is not critical, as long as the output provided by the estimator is reliable and consistent. This work is not concerned with identifying the parameters of the system with great accuracy with respect to the real (physical) values. The algorithms used in this work establish a benchmark of acceptable operating regions in the Eigenvalue Space.
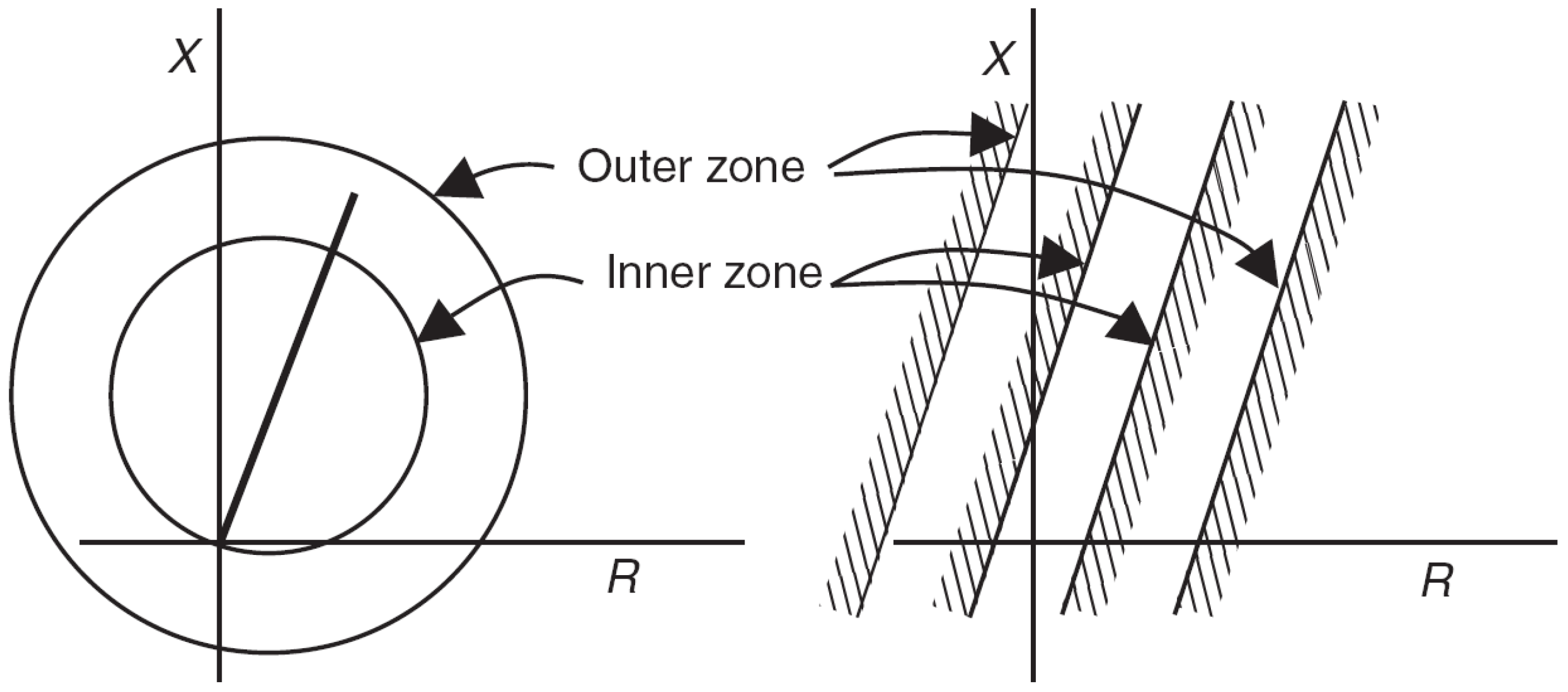
3.2. Framework for Zones of Protection in Eigenvalue Space
The output of the Subspace estimator is used to build eigenvalue clusters. These clusters are created using
k-means clustering techniques. The clusters are dynamic, and can be updated at user specified intervals or whenever new data becomes available. In this work, simulated PMU readings collected over a 24-h period were used to train the clustering algorithm. The load profile, illustrated in
Figure 6, was modeled after Houston, TX with data provided by ERCOT [
29].
In order to facilitate the creation of the zones of protection and improve their reliability, statistical metrics are used to evaluate the suitability of the clusters. As part of this work a metric referred to as the Eigenvalue Drift Coefficient (EDC) was developed. After the clustering algorithm has converged, vectors containing the Euclidean distance between pairs of eigenvalues in each cluster are created. From this set of values, the mean distance and standard deviation within each cluster is computed. The EDC of each cluster is calculated as follows:
where
is the standard deviation, and
is the mean of the distances.
Clusters with a high EDC tend to have a relatively uniform distribution compared to clusters with a low EDC. Clusters with high EDC yield zones of protection which are more secure. The clustering step is repeated until all clusters produce acceptable EDC values. Polynomial curve fitting is then used to define the zones of protection. Low and high EDC clusters are illustrated in
Figure 7 and
Figure 8, respectively. High EDC values allow for the use of lower degree polynomials for curve fitting.
The number of clusters used by the algorithm is determined iteratively, starting with 6 clusters, and decreasing the number of clusters until EDCs higher than 1.7 are achieved for all clusters. At EDCs higher than 1.7, polynomials of degree 3 and less can be used to produce the zones of protection. For clusters with an EDC at or less 1.7, polynomials of degrees 3 and less might not provide a suitable fit. In addition to having to utilize higher degree polynomials for curve fitting, a low EDC also leads to protection zones where most of the eigenvalues are not at the center of the zone. Off-centered eigenvalues ultimately lead to zones with inconsistent safety margins, which could lead to false positives if eigenvalues near the edge of the zone drift outside during normal operation, or delayed reaction during an abnormal condition for eigenvalues located in a particularly wide area of the zone.
Safety margins are created using the mean of the cluster, and a multiplier corresponding to the magnitude of . For higher values of , the algorithm uses smaller multipliers, while higher multipliers are used for smaller values of . Two zones of protection are used for each cluster. An inner zone where the eigenvalues reside during normal operation, and an outer zone that generates an immediate reaction. If an eigenvalue drifts to the area in between the two zones, a timer is started. If the eigenvalue returns to the inner zone before the timer expires, no action is taken. However, if the eigenvalue doesn’t return to the inner zone before the time expires or continues to drift beyond the second zone, action is taken. For this work, a time period equivalent to the cluster update time was used.
3.3. High Impedance Fault Detection
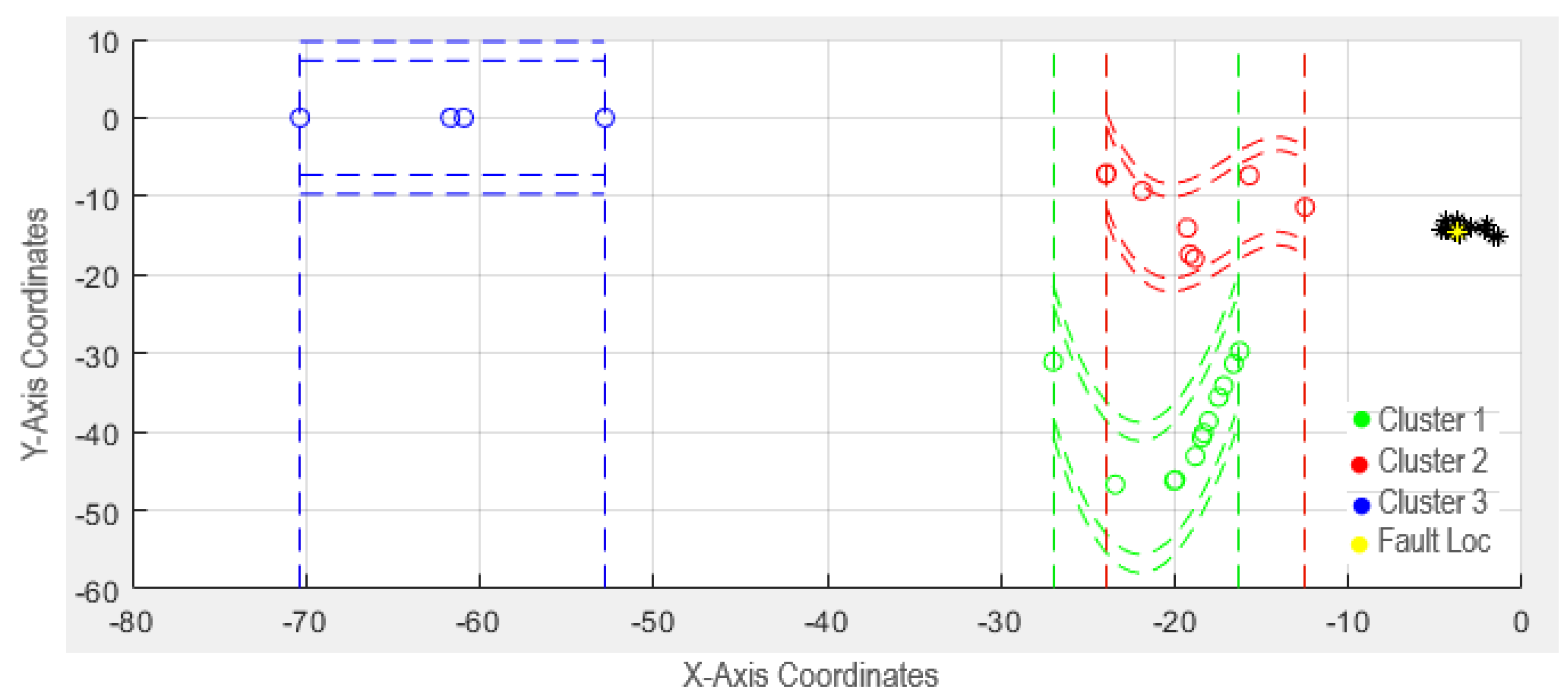
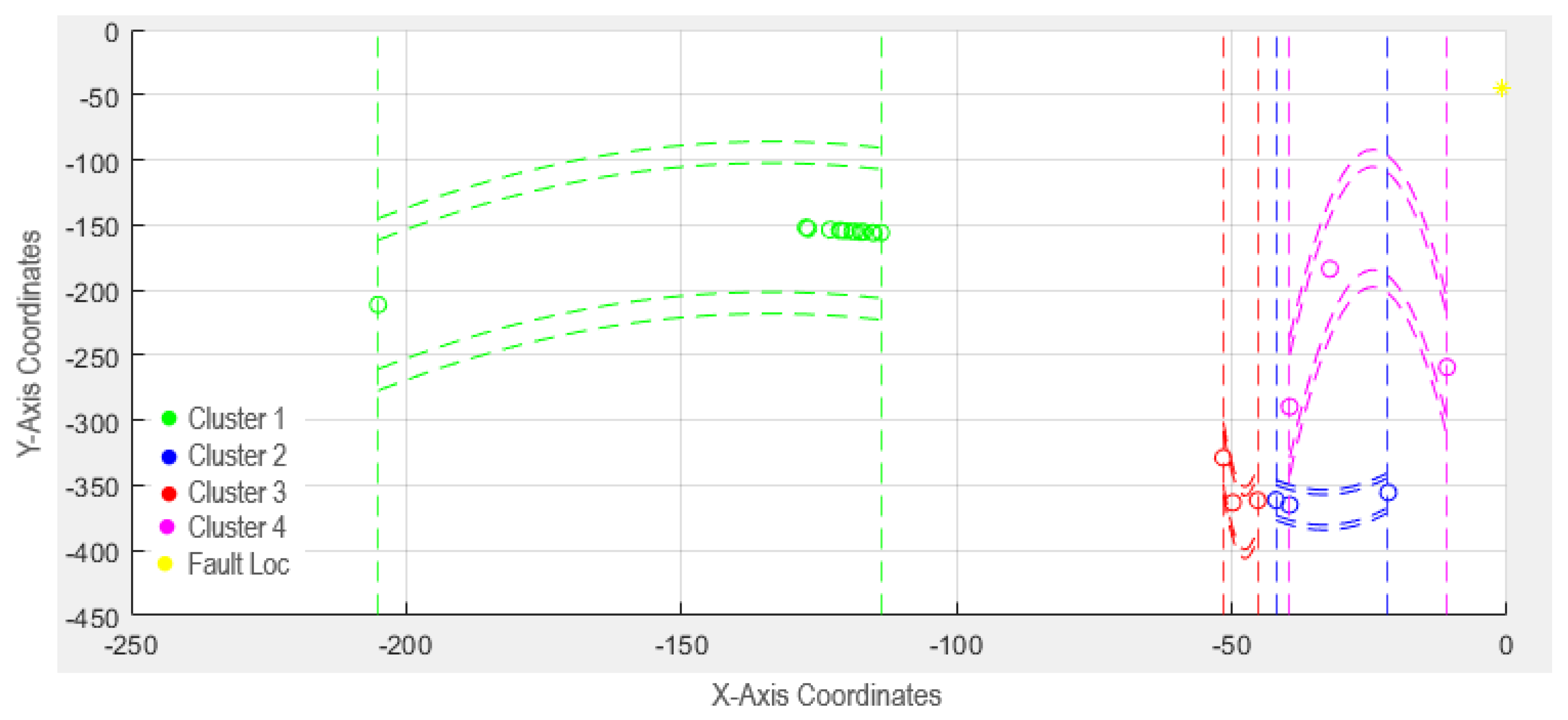
As stated in previous sections, the eigenvalues of each powerline have a distinct drift pattern in the eigenvalue space. These patterns are determined by the components that make up the impedance of the line, combined with the apparent impedance of the load. When foreign agents are introduced during abnormal conditions, such as a resistive element during a HIF, the eigenvalues of the line will drift away from their normal zones of operation. During a fault the eigenvalues of the line drift towards a point in the Eigenvalue Space determined by the characteristics of the fault. The higher the magnitude of the fault, the closer the eigenvalues move to this point in the Eigenvalue Space. For low impedance faults, this drift is quite dramatic, this is analogous to the changes in current magnitude seen during a bolted fault. Although not as dramatic as the changes seen during a bolted fault, the disturbances seen during a HIF are enough to produce a distinguishable deviation from the normal zones. This sensitivity to disturbances allows this solution to identify HIFs with a resistance of over 1 k
.
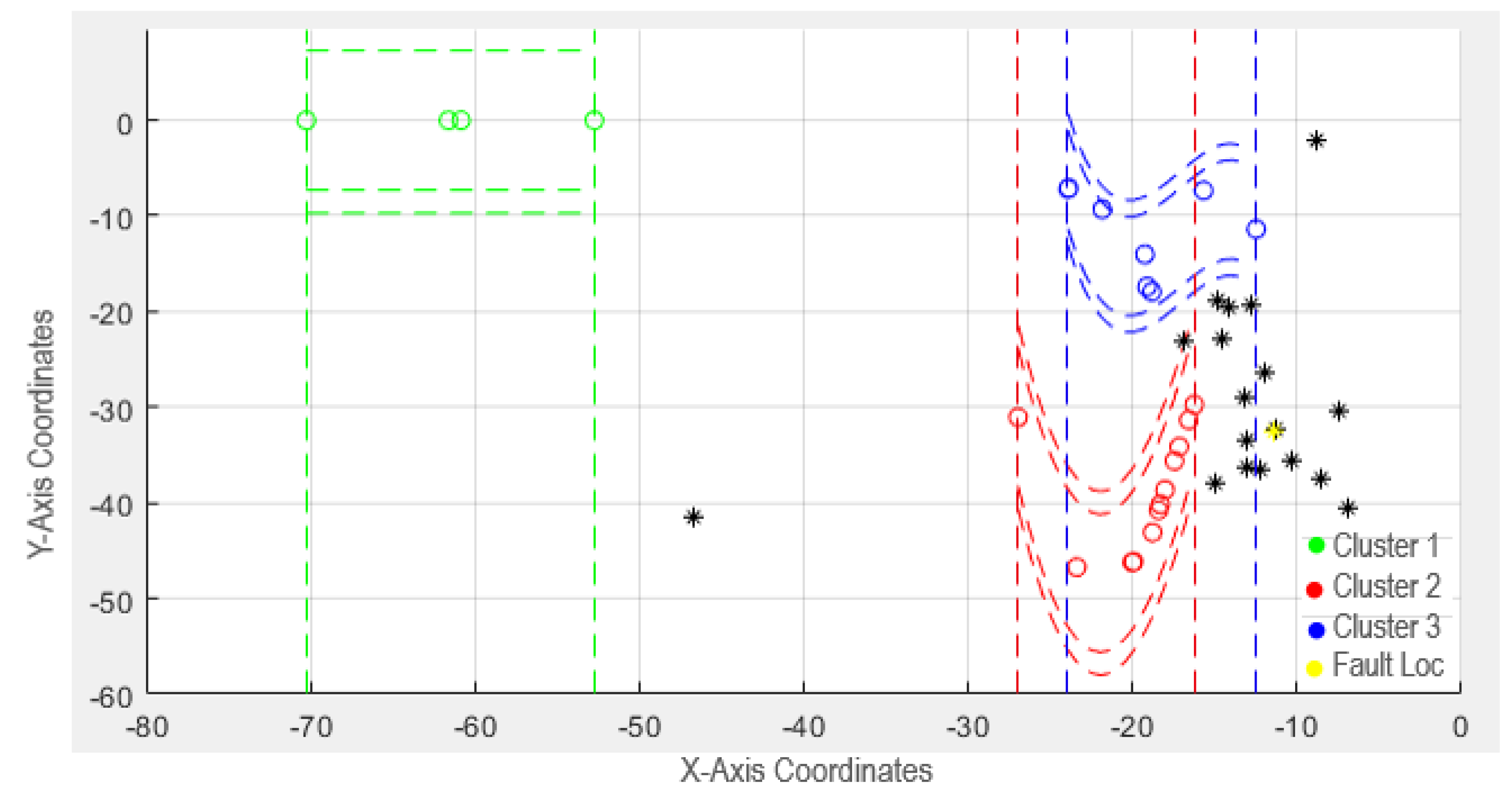
Figure 9 illustrates a case of eigenvalue drift during a fault with a resistance of 10
, while
Figure 10 shows the drift of eigenvalues in response to a fault with a resistance of 100
.
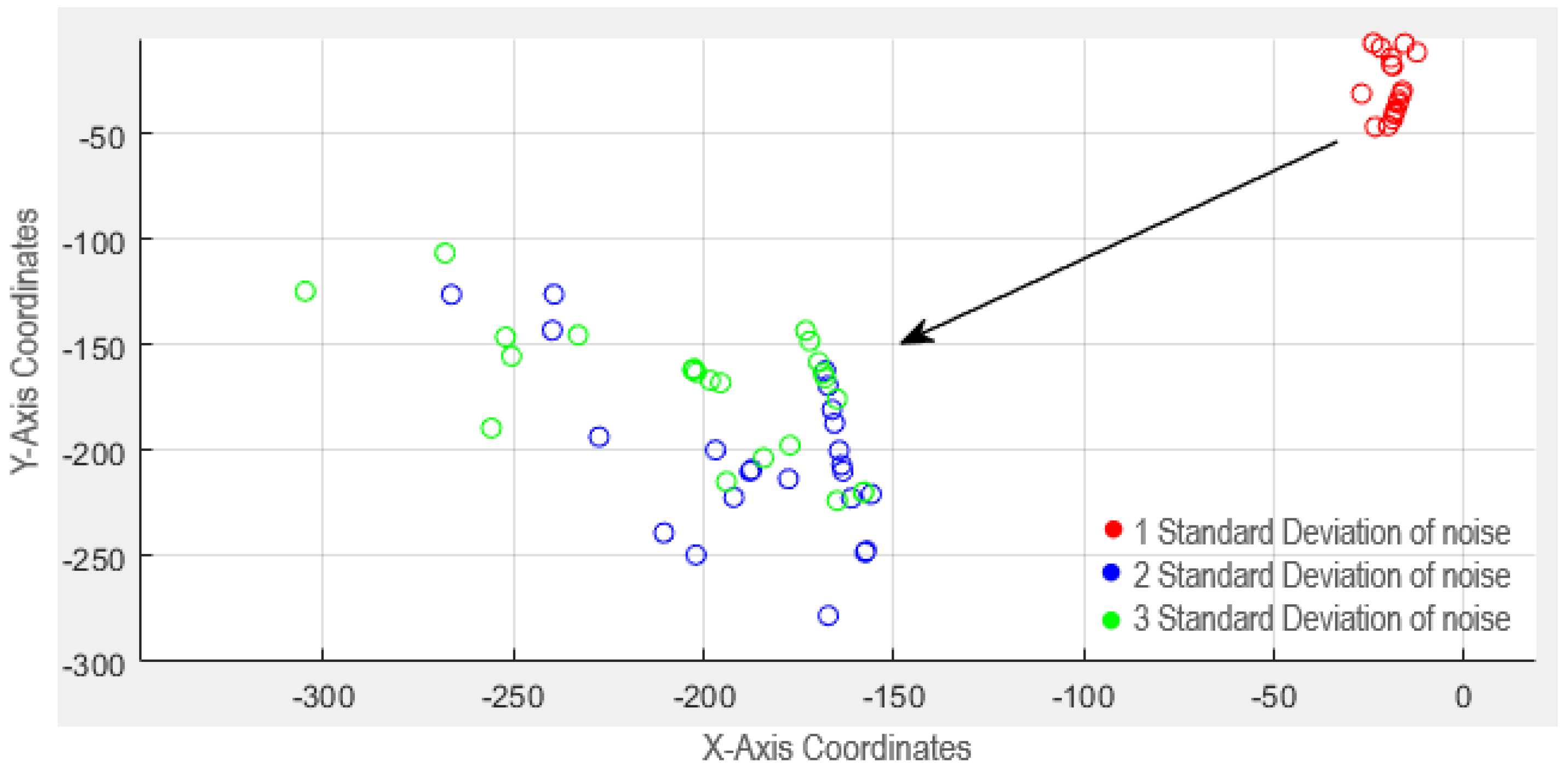
3.4. Robustness to Noise
High sensitivity can be a double-edged sword as increased dependability can lead to false positives. The performance of the solution presented in this work was studied in the presence of noise. Noise injections do not change the general pattern followed by the eigenvalues, the overall pattern in simply shifted.
Figure 11 illustrates this behavior.
In extreme cases where the magnitude of the noise can be classified as a gross error in measurement, the eigenvalues travel far beyond their normal zones, somewhat similar to the behavior seen during high magnitude faults. A scheme for the identification of gross errors in measurements can be developed from this solution: when the Subspace Estimator sees a dramatic Eigenvalue drift, the estimator could verify the status of the relay(s) protecting the line. If over-current elements in the relay have not been picked up, this would indicate an erroneous reading. This could improve the robustness of WAMS based State Estimation solutions.
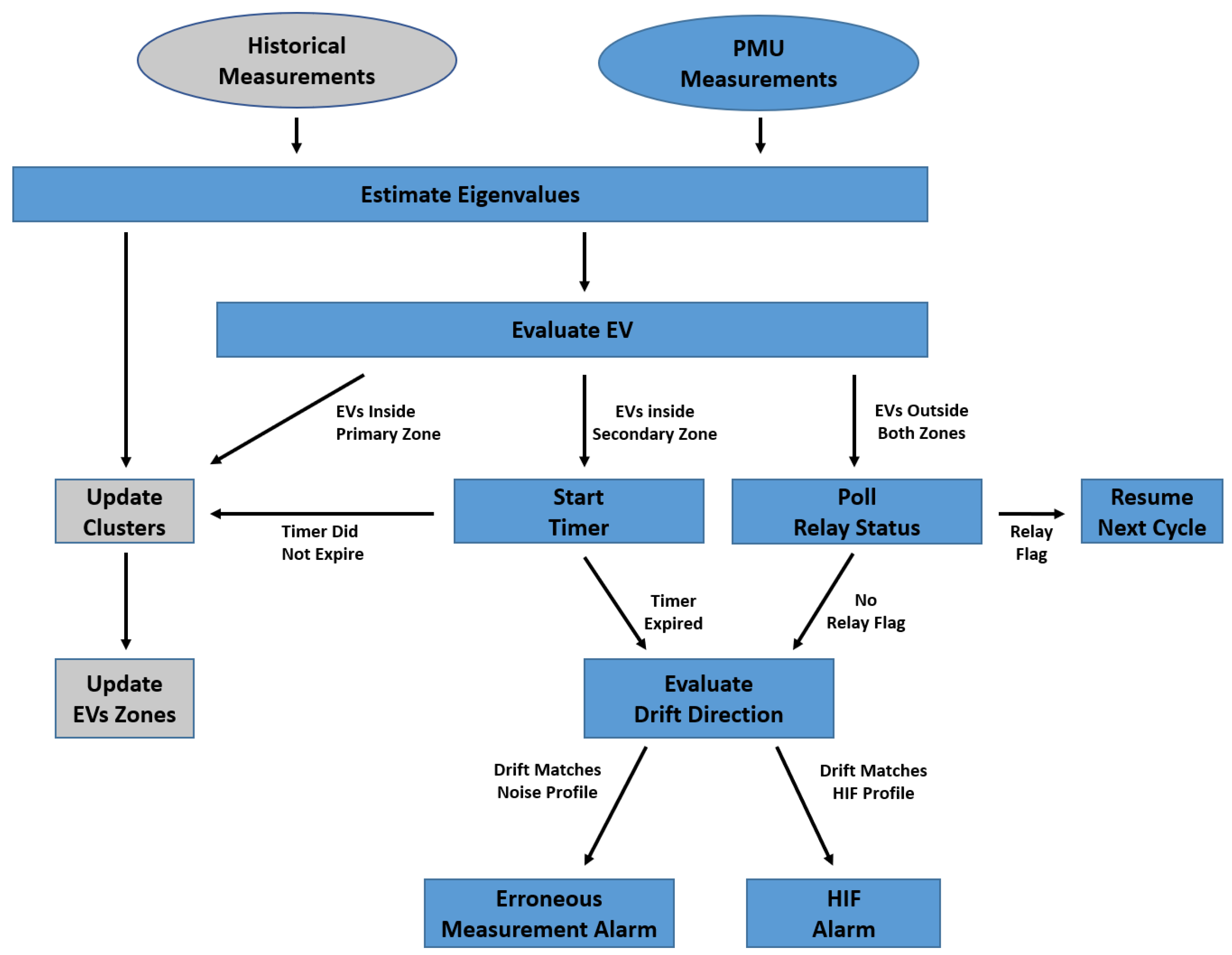
Eigenvalue space could also be integrated into relaying schemes to enhance the security of the scheme. Similar to a permissive scheme, a relay could poll the status of the estimator before sending a trip or a block command.
Figure 12 illustrates the algorithm of the model introduced in this work.
A case study and the associated findings are presented in the next section.
5. Conclusions
This work presented a model for the detection of high impedance faults. The framework leverages WAMS technology, protective relaying schemes, and state estimation algorithms to produce a solution that yields high detection rates, 100% in the scenarios studied as part of this work. Encouraging results combined a philosophy that emphasizes generality, making this framework a promising alternative to solve the HIF problem. The performance of this method was studied in simulations based on benchmark systems. The key outcome of this work is a solution that is highly effective at detecting HIFs, well beyond 100 of fault resistance. This is done by observing the characteristics of the system during normal operation and measuring deviations from the normal, in contrast to other HIF solutions, which focus on the characteristics of the faults.
Factors such as line impedance, loading on the line, and available fault current impact how the eigenvalues behave during normal operating conditions. To a lesser extent, these factors also affect how eigenvalues drift during fault conditions. Drift during fault conditions is mainly driven by the characteristics of the fault. The size of the system (the number of buses, lines, and sources) also has direct influence on the signature (eigenvalue drift pattern) of the lines. Changing the size of the system is equivalent to changing the overall impedance of the system. One of the strengths of the method presented in the paper is that it adapts to changing conditions and to virtually any topology. The only requirement is that the system be allowed to establish a baseline of acceptable values, and then the algorithm will look for deviations.
Presently, the main limitation of this framework seems to be distinguishing HIFs (over 500 in fault resistance) from large injections of measurement noise, however, statistical tools and machine learning could hold the key to overcoming this challenge. Another limitation is the lack of a fault location module. Future work will focus on addressing those two limitations in addition to expanding the framework to include detection of faults of multiple impedance profiles and faults of a dynamic and transient nature.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}