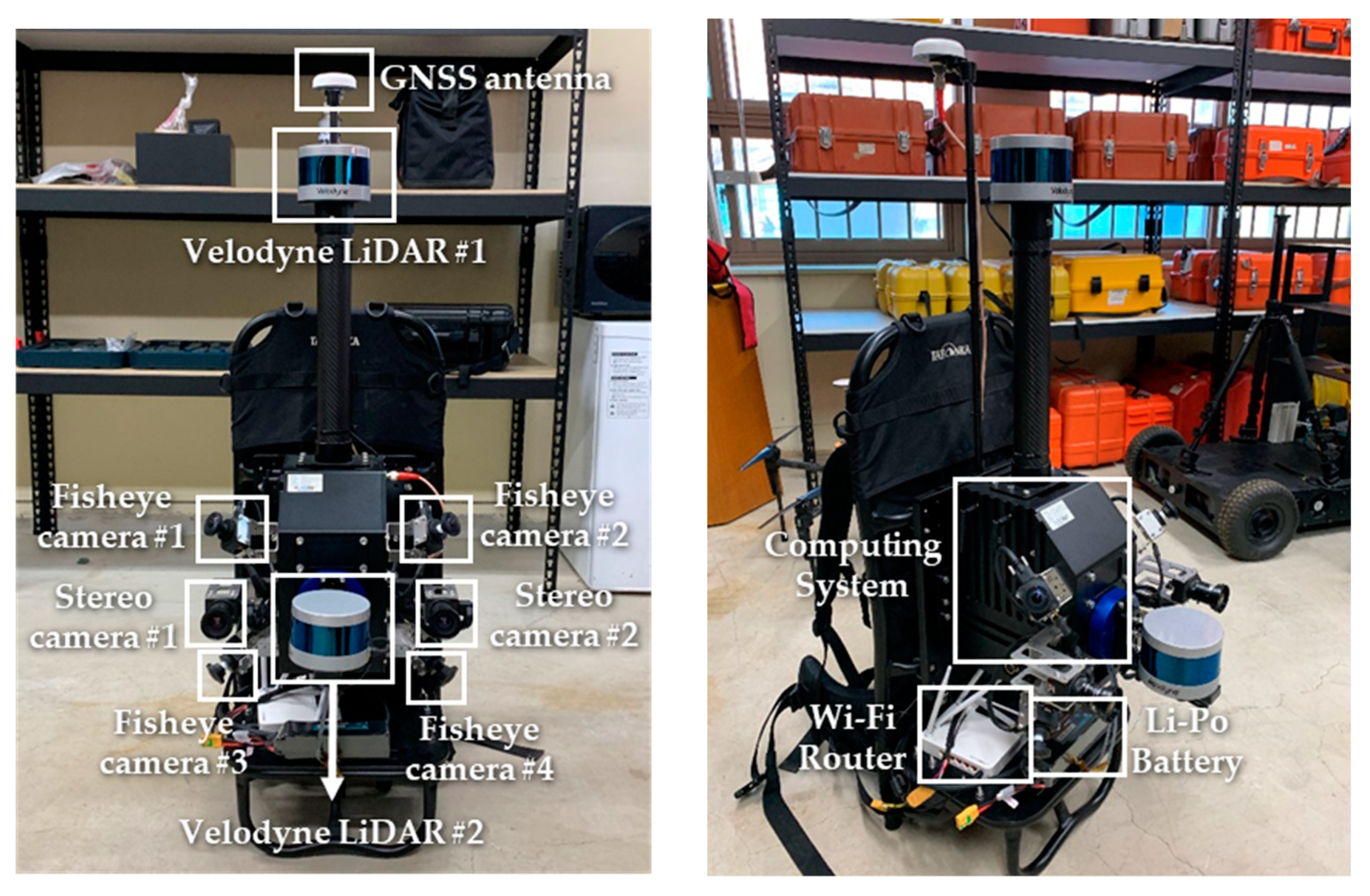
Figure 1.
Backpack-based Multi-Beam Light Detection and Ranging (LiDAR) (MBL) sensor system.
Figure 1.
Backpack-based Multi-Beam Light Detection and Ranging (LiDAR) (MBL) sensor system.
Figure 2.
Velodyne VLP-16.
Figure 2.
Velodyne VLP-16.
Figure 3.
Trimble APX-15 Unmanned Aerial Vehicle (UAV) single board Global Navigation Satellite System (GNSS)-inertial solution.
Figure 3.
Trimble APX-15 Unmanned Aerial Vehicle (UAV) single board Global Navigation Satellite System (GNSS)-inertial solution.
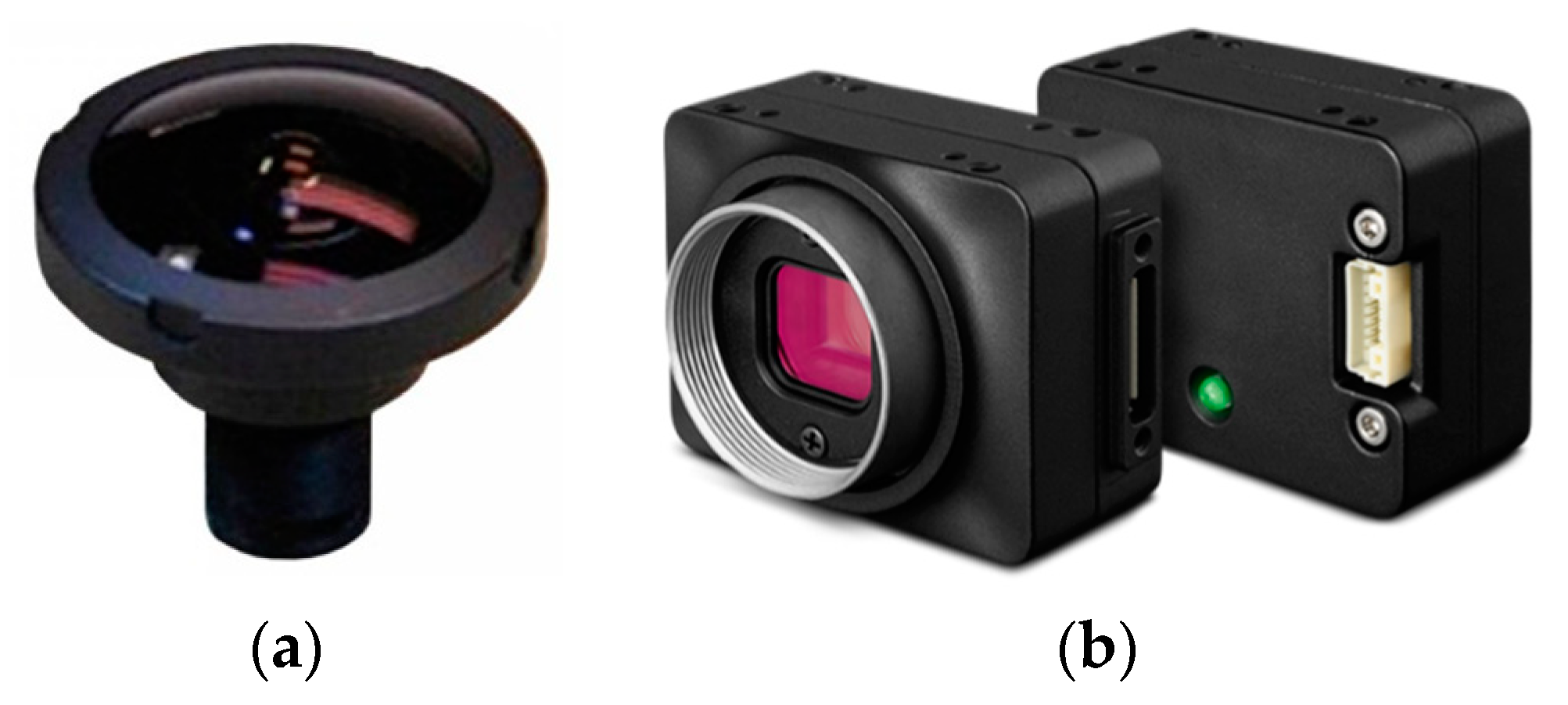
Figure 4.
Fisheye lens camera: (a) Sunnex DSL315 fisheye lens; (b) Chameloen3 USB3 Vision.
Figure 4.
Fisheye lens camera: (a) Sunnex DSL315 fisheye lens; (b) Chameloen3 USB3 Vision.
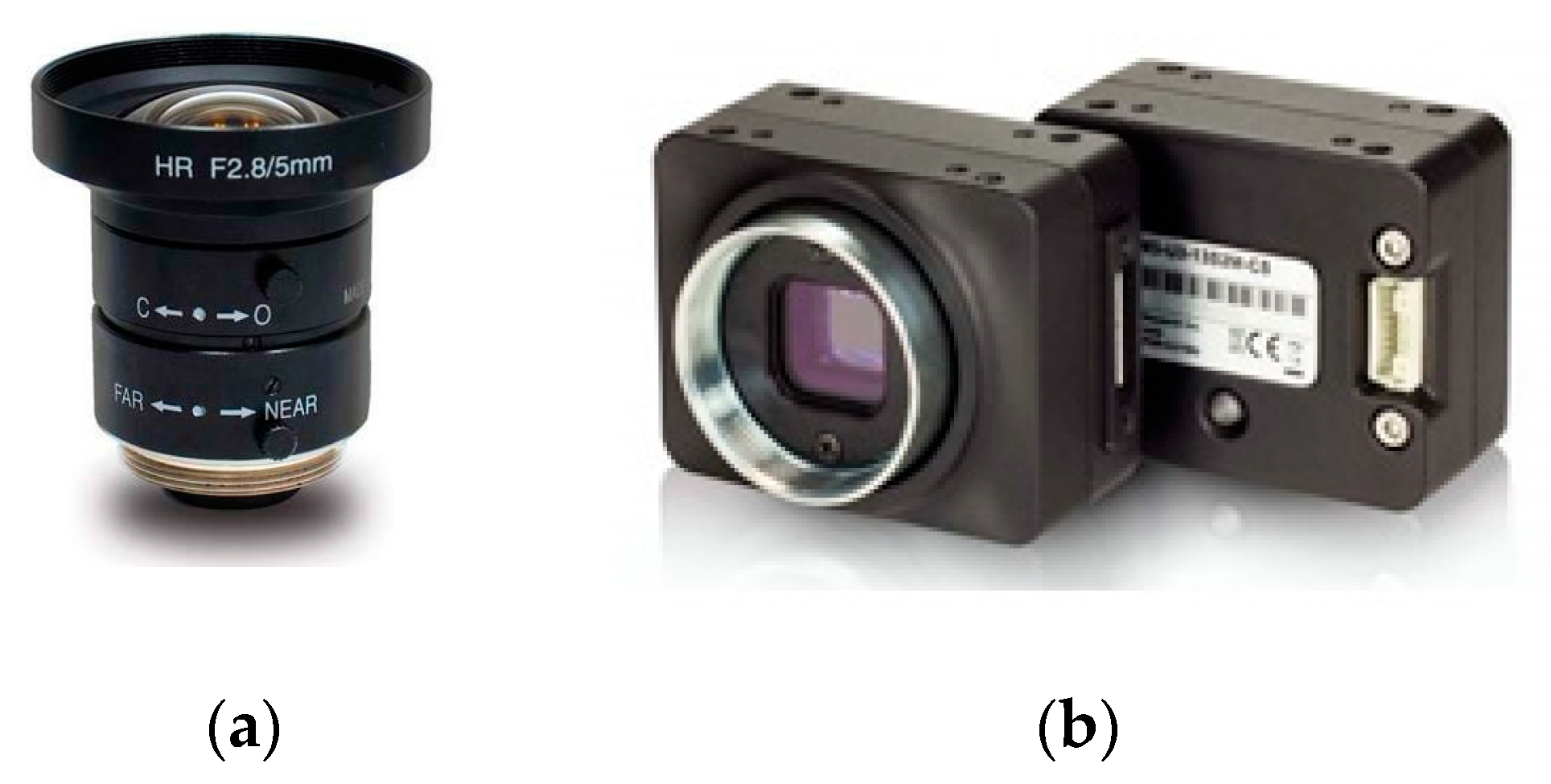
Figure 5.
Stereo camera: (a) KOWA LM5JCM; (b) Chameleon3 USB3 Vision.
Figure 5.
Stereo camera: (a) KOWA LM5JCM; (b) Chameleon3 USB3 Vision.
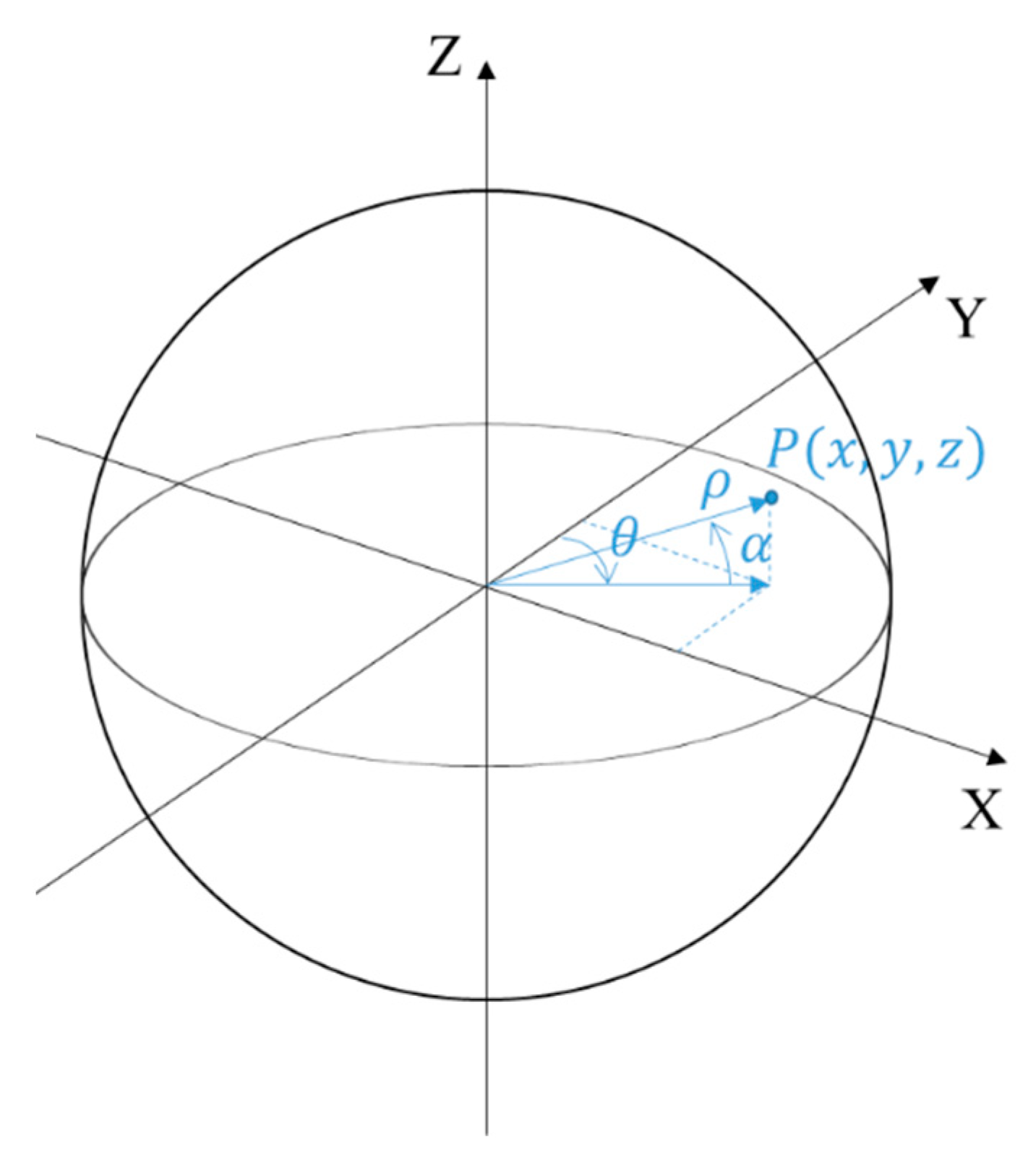
Figure 6.
Conversion from a spherical coordinate system to a Cartesian coordinate system.
Figure 6.
Conversion from a spherical coordinate system to a Cartesian coordinate system.
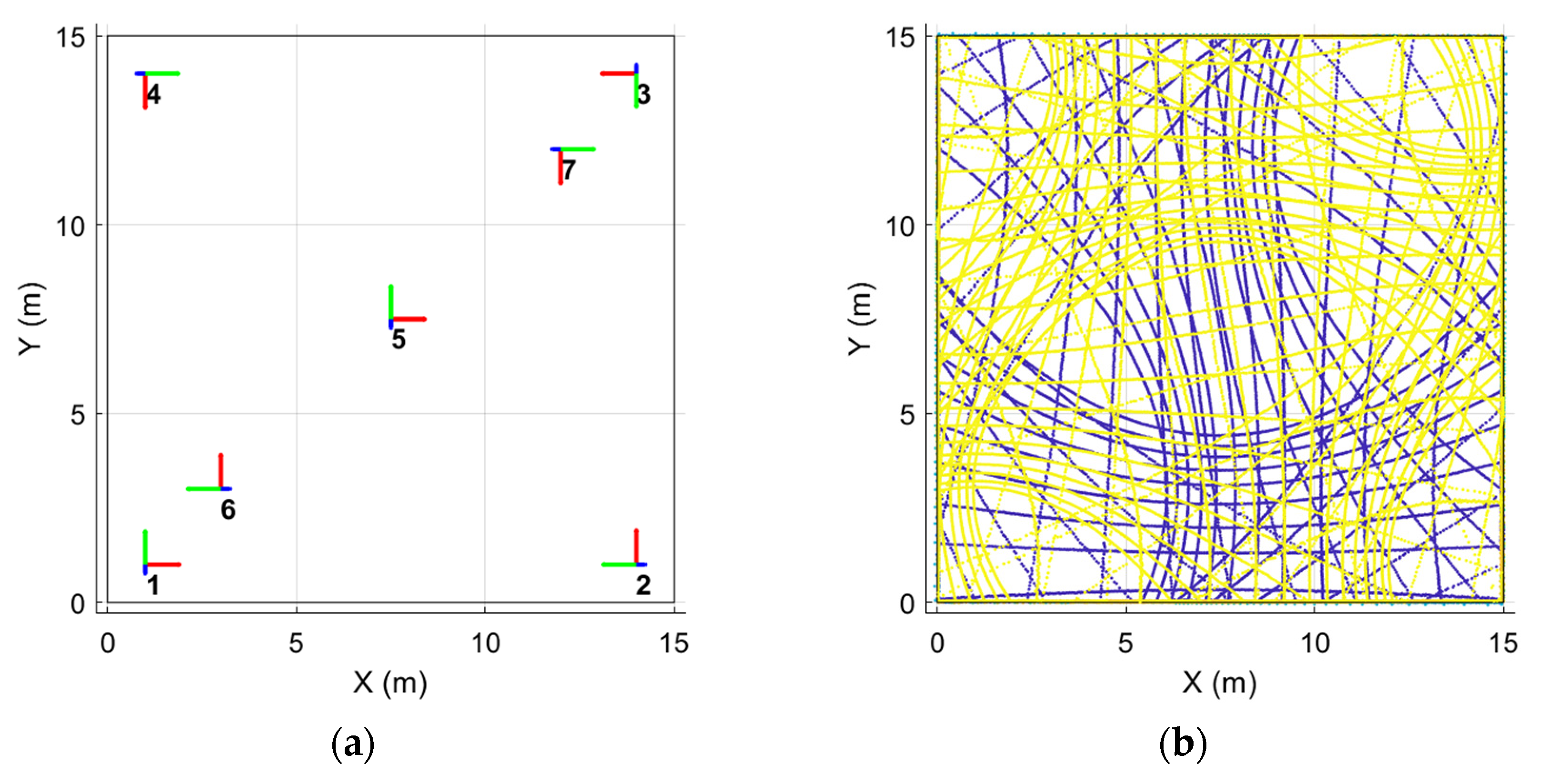
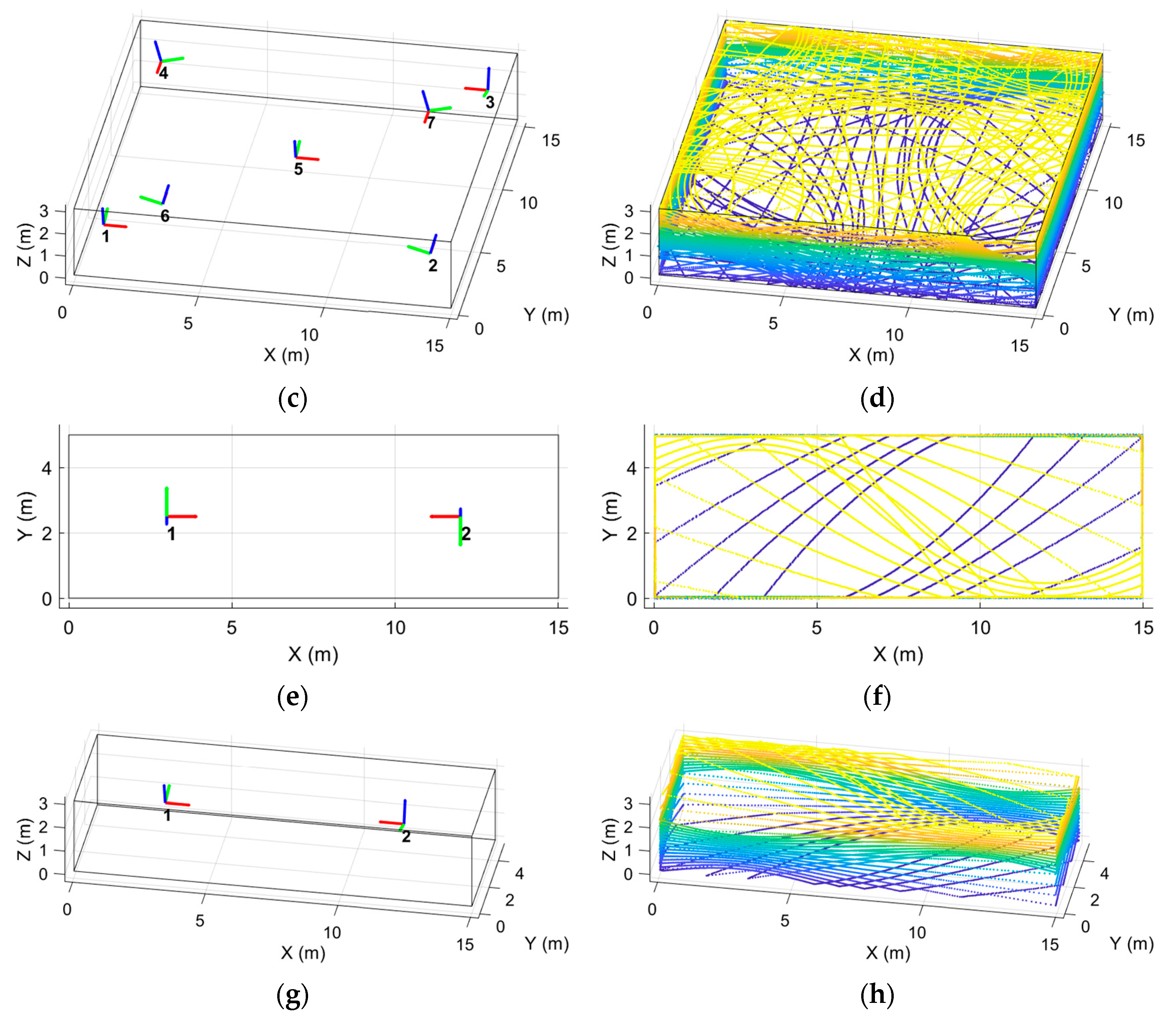
Figure 7.
Simulated environment and their corresponding point clouds: (a,c) network configuration for Calibration I; (b,d) point cloud generated for Calibration I; (e,g) network configuration for Calibration II; (f,h) point cloud generated for Calibration II. Color coded by height.
Figure 7.
Simulated environment and their corresponding point clouds: (a,c) network configuration for Calibration I; (b,d) point cloud generated for Calibration I; (e,g) network configuration for Calibration II; (f,h) point cloud generated for Calibration II. Color coded by height.
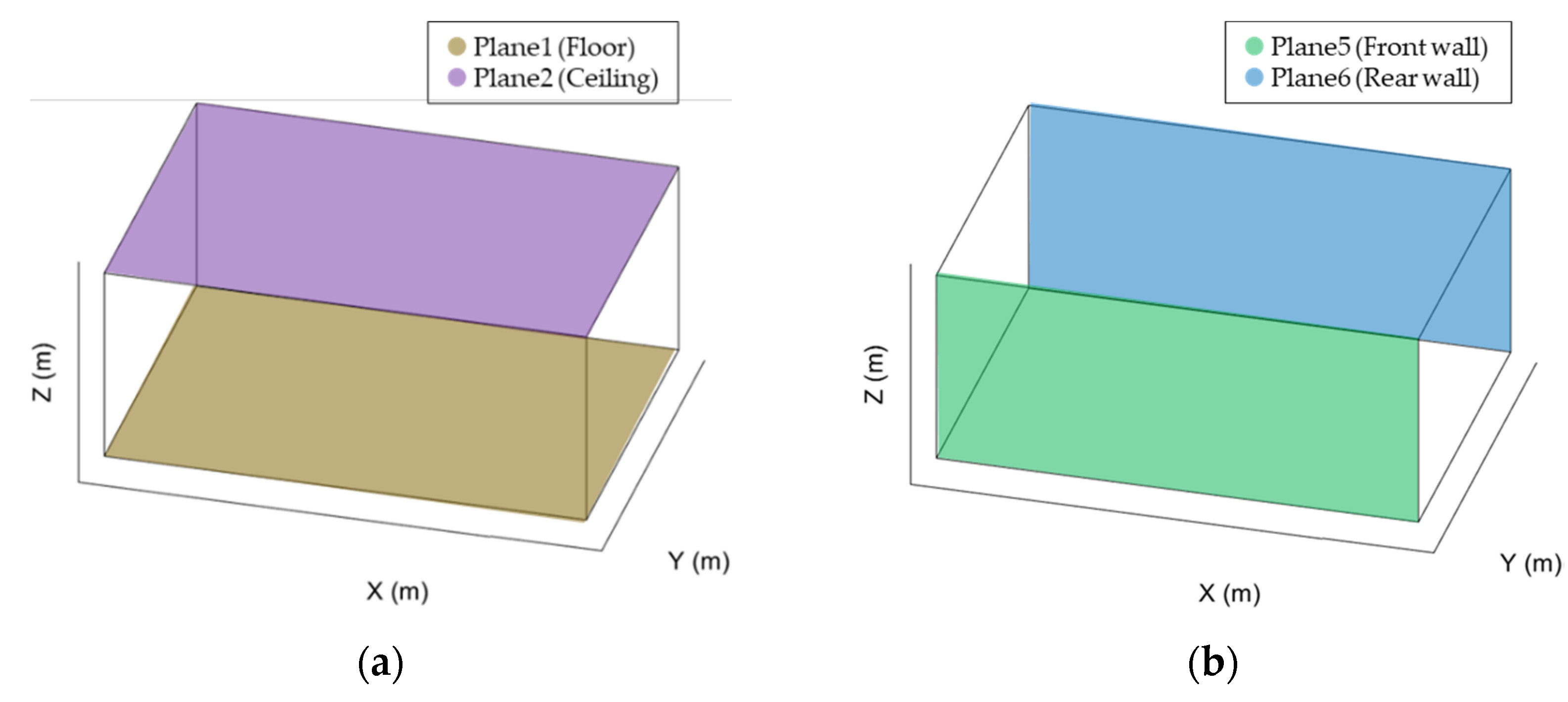
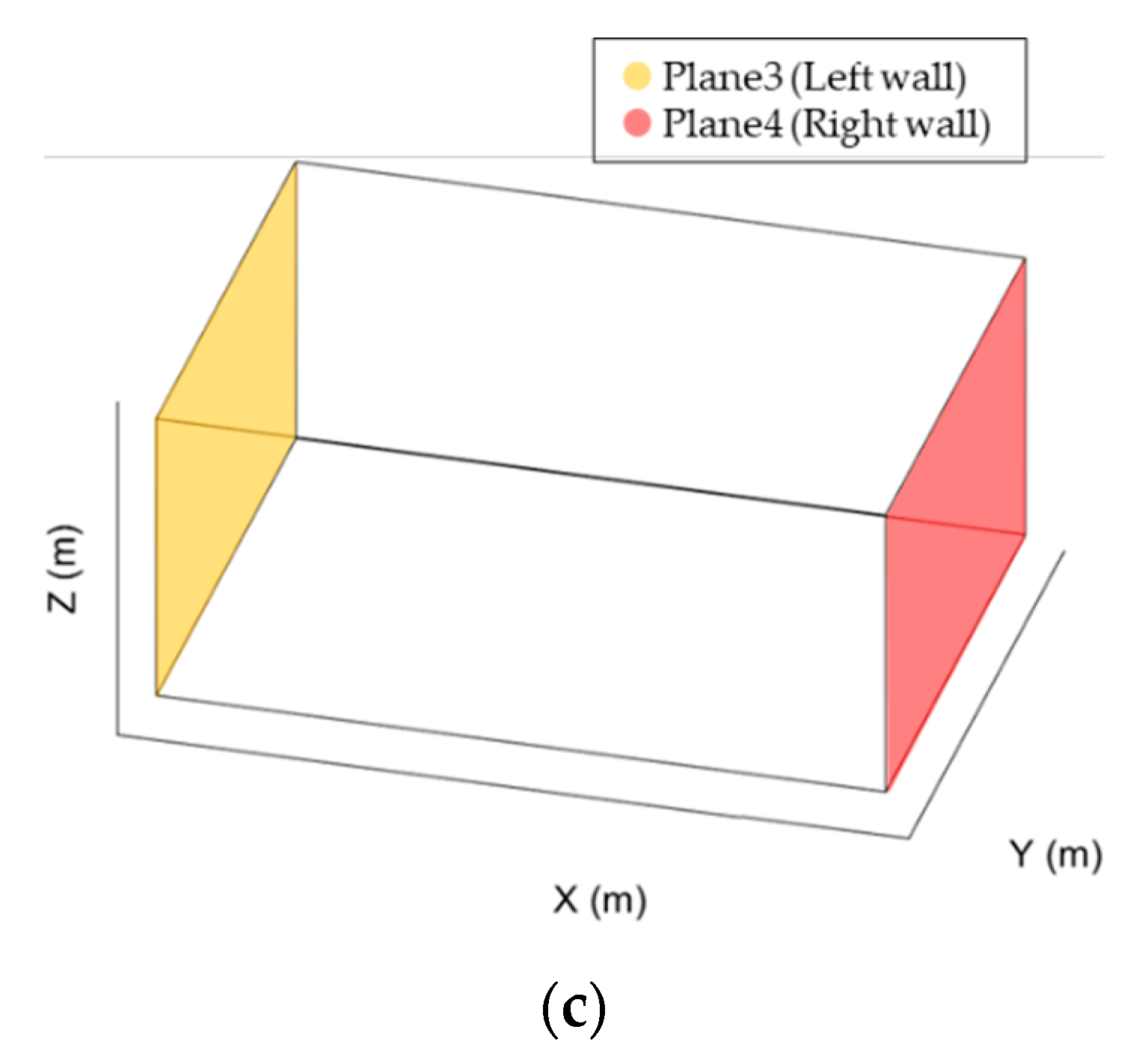
Figure 8.
Plane number settings: (a) ceiling and floor; (b) front and rear walls; (c) left and right walls.
Figure 8.
Plane number settings: (a) ceiling and floor; (b) front and rear walls; (c) left and right walls.
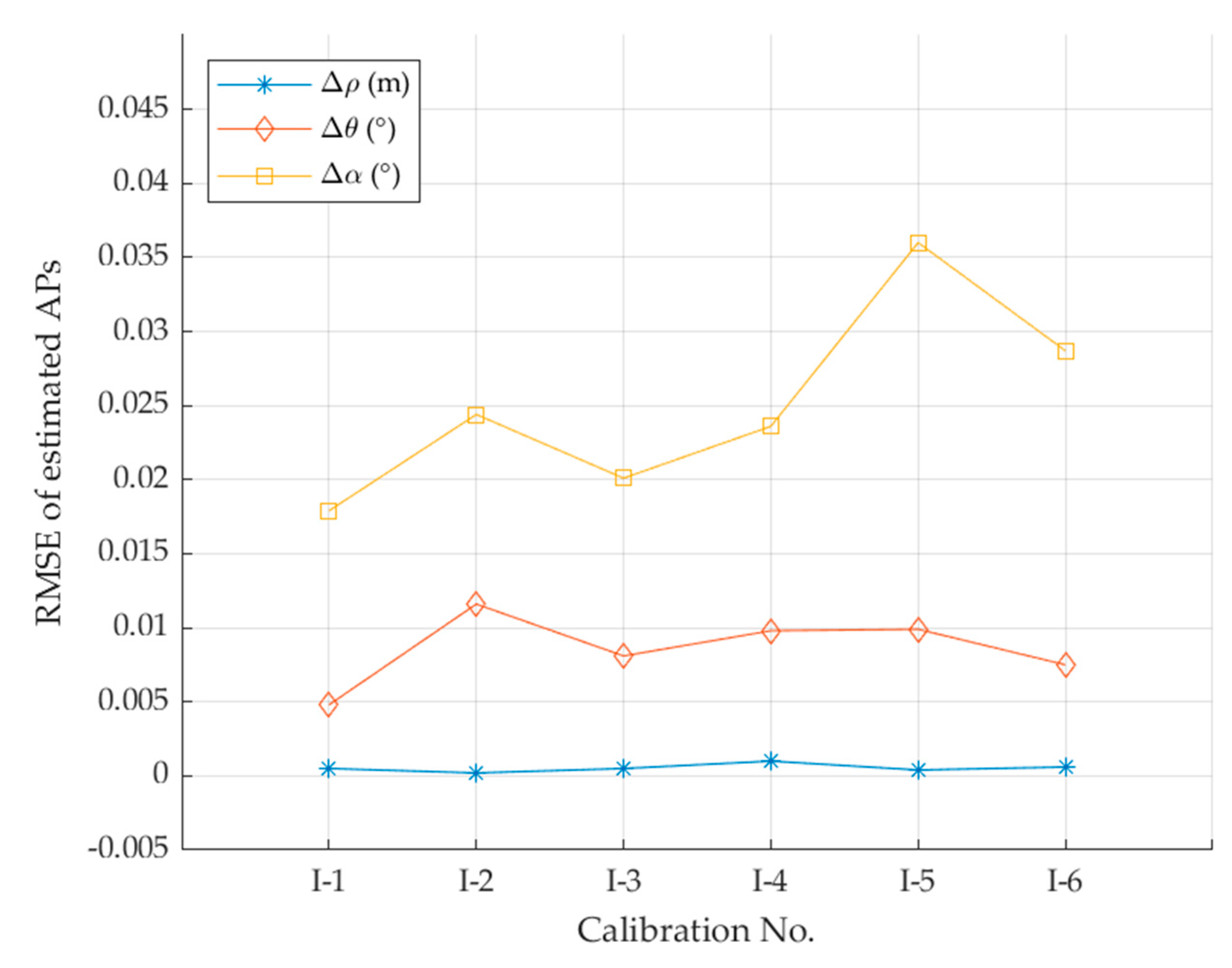
Figure 9.
RMSE of estimated additional parameters (APs) for Calibration I.
Figure 9.
RMSE of estimated additional parameters (APs) for Calibration I.
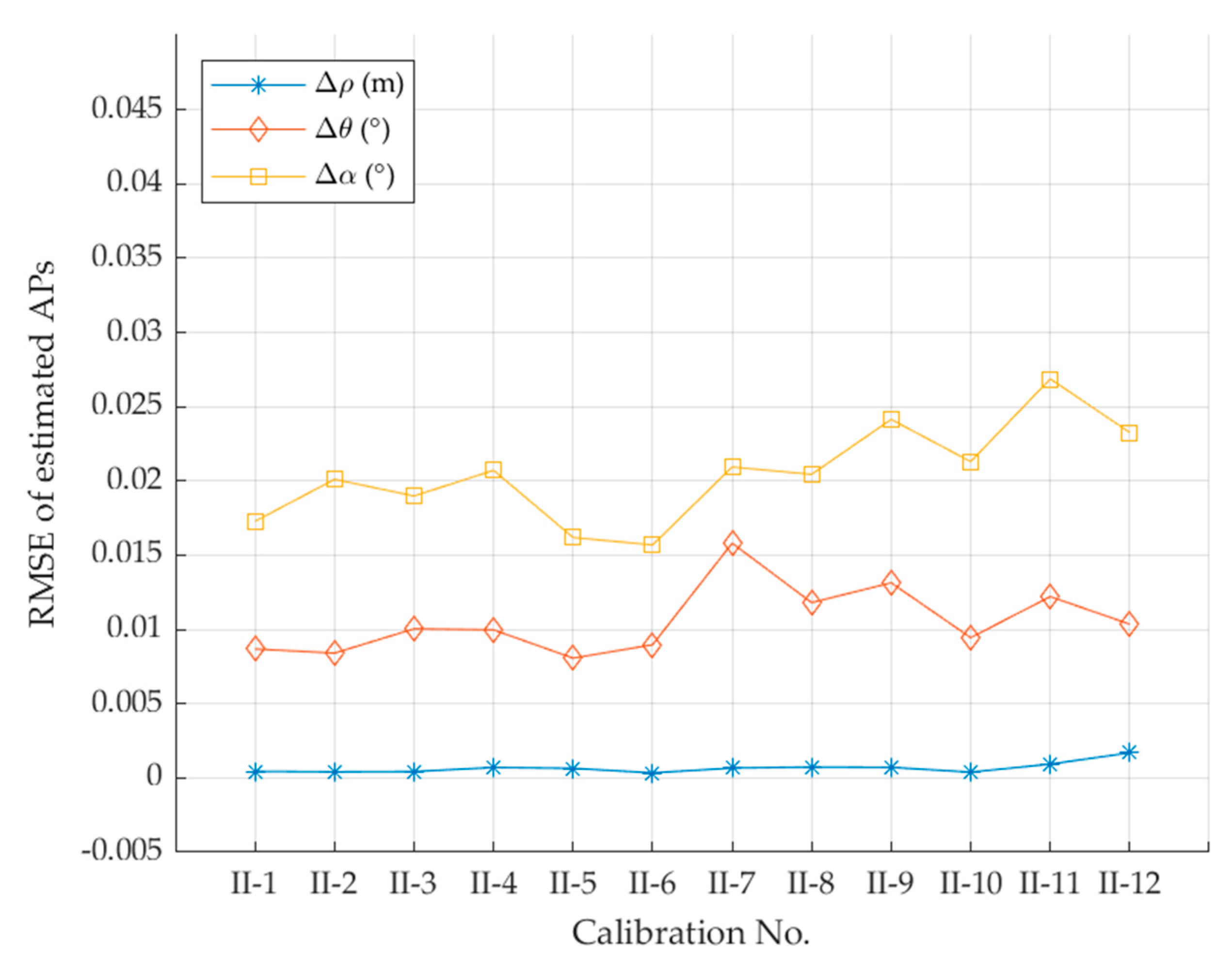
Figure 10.
RMSE of estimated APs for Calibration II.
Figure 10.
RMSE of estimated APs for Calibration II.
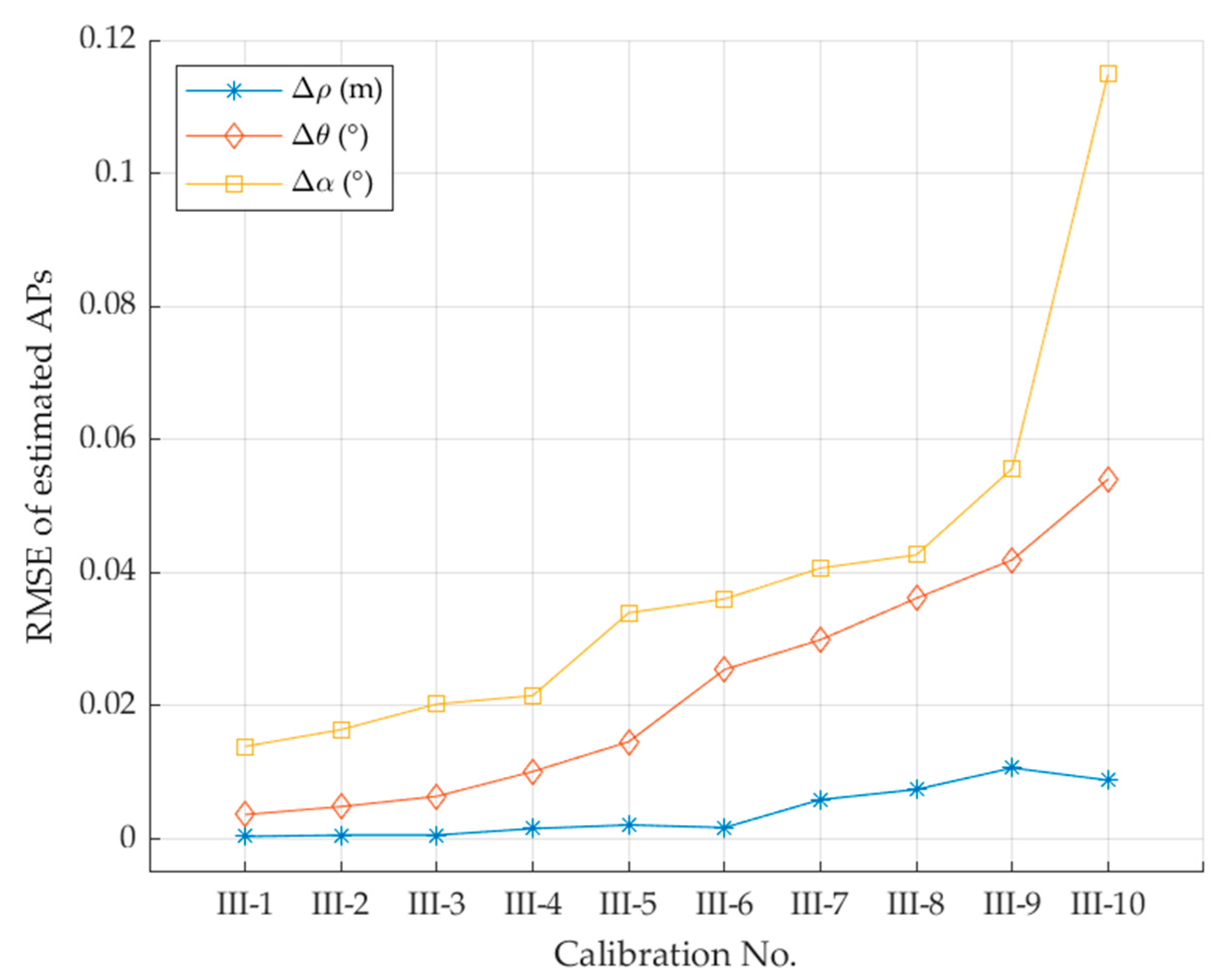
Figure 11.
RMSE of estimated APs for Calibration III.
Figure 11.
RMSE of estimated APs for Calibration III.
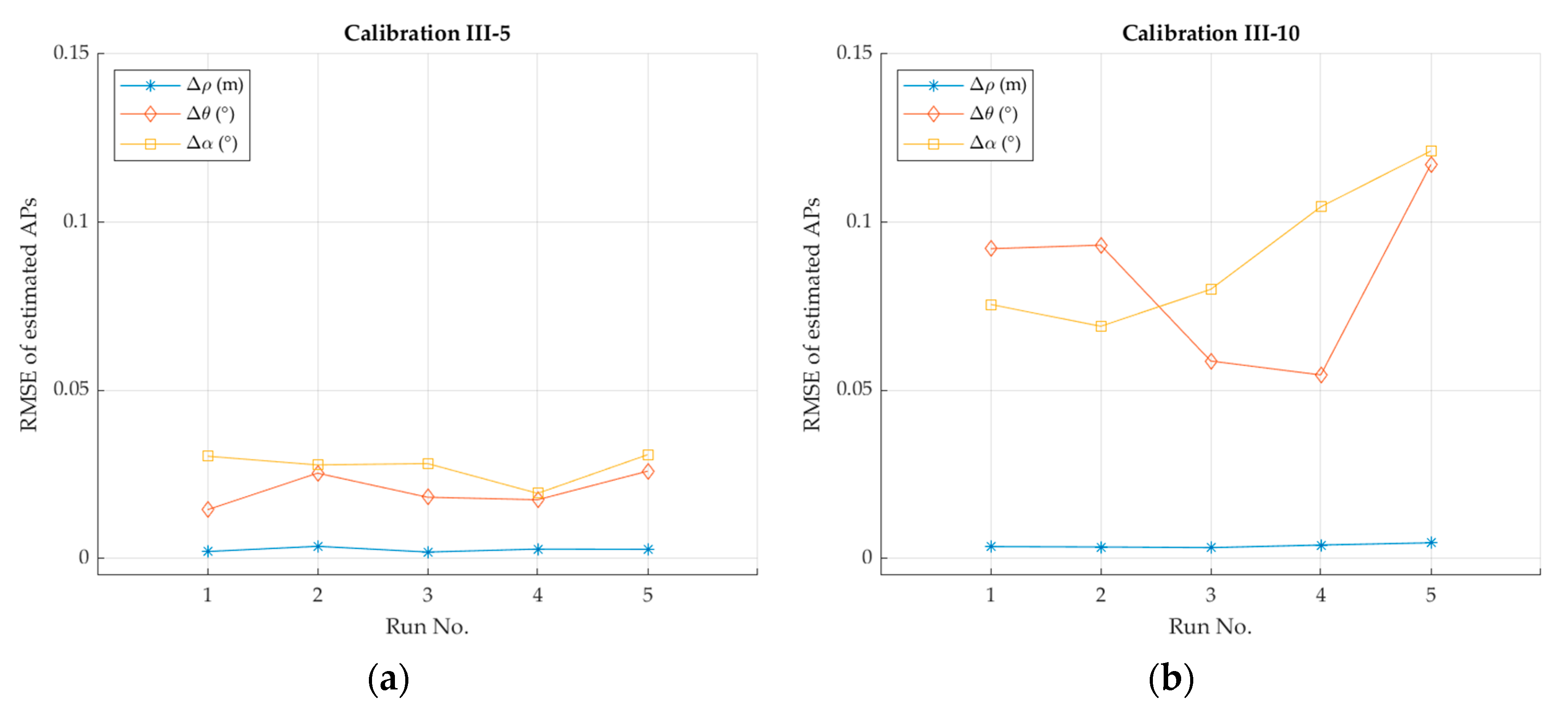
Figure 12.
RMSE of estimated Aps: (a) five runs of Calibration III-5; (b) five runs of Calibration III-10.
Figure 12.
RMSE of estimated Aps: (a) five runs of Calibration III-5; (b) five runs of Calibration III-10.
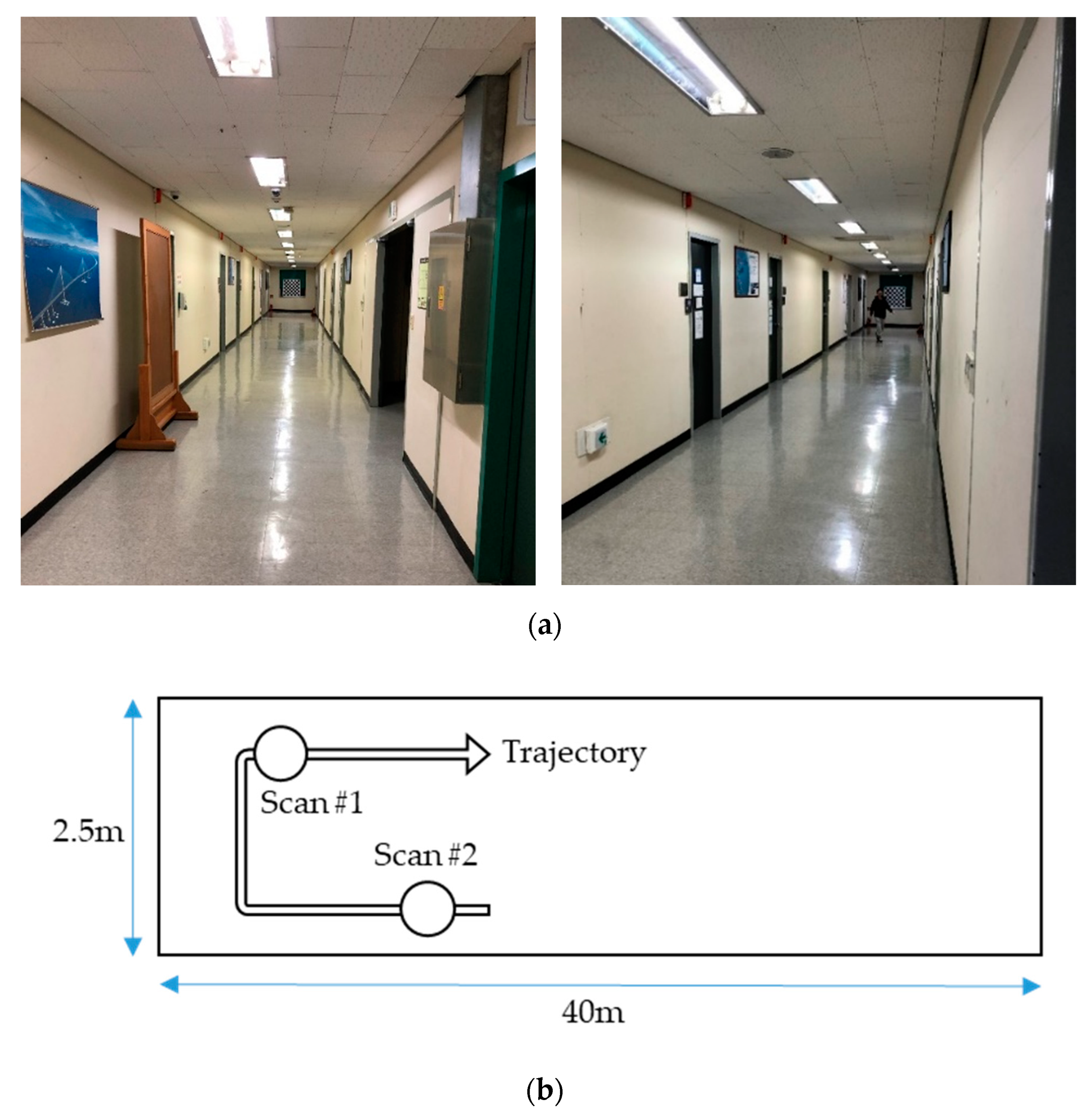
Figure 13.
Real dataset acquisition site and schematic set-up. (a) Corridor at the Myongji University (b) schematic drawing of test site and trajectory.
Figure 13.
Real dataset acquisition site and schematic set-up. (a) Corridor at the Myongji University (b) schematic drawing of test site and trajectory.
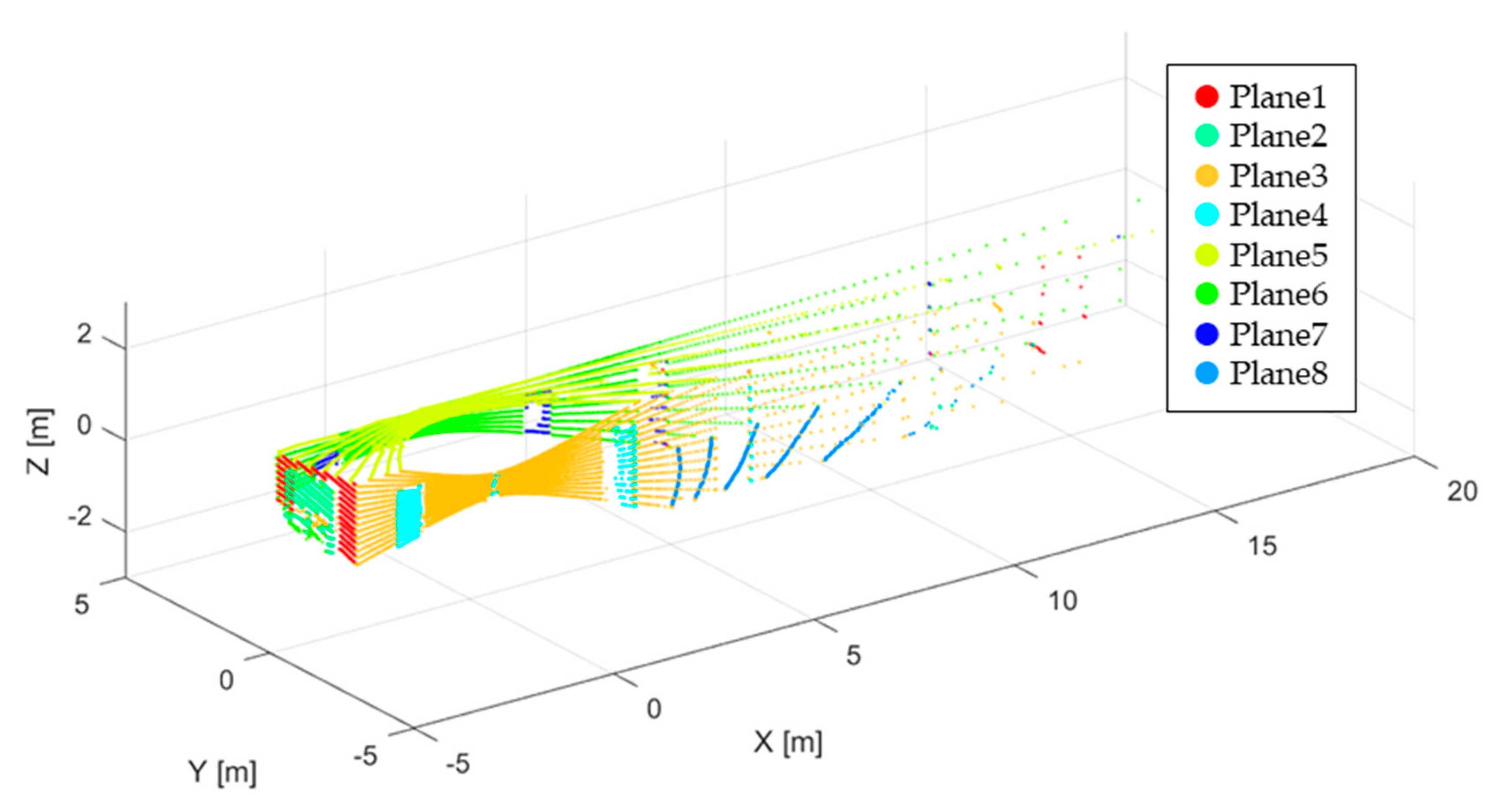
Figure 14.
Common planar features seen in Scan #2.
Figure 14.
Common planar features seen in Scan #2.
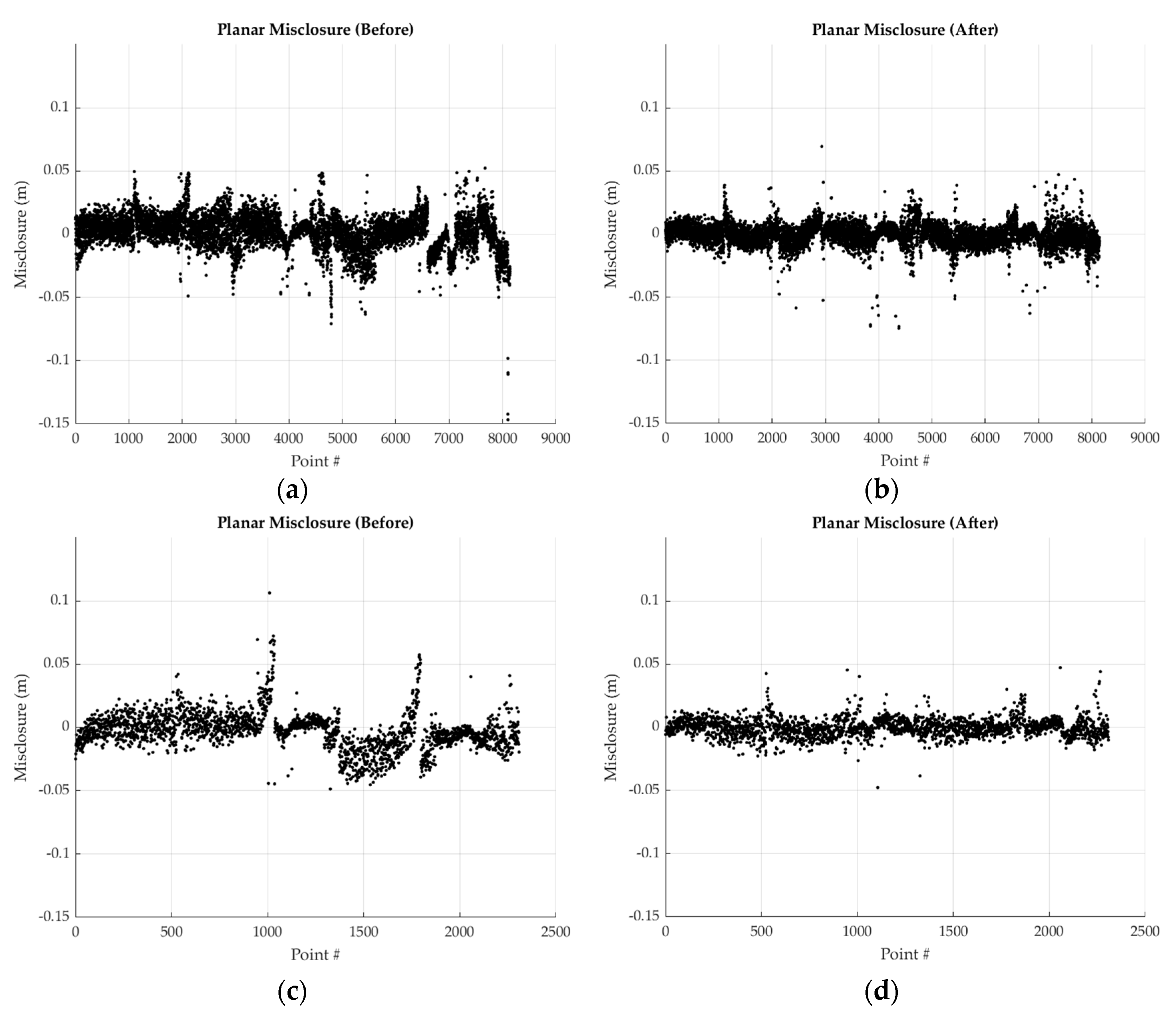
Figure 15.
Planar misclosure before and after the adjustment: (a) before Calibration IV-1; (b) after Calibration IV-1; (c) before Calibration IV-2; (d) after Calibration IV-2.
Figure 15.
Planar misclosure before and after the adjustment: (a) before Calibration IV-1; (b) after Calibration IV-1; (c) before Calibration IV-2; (d) after Calibration IV-2.
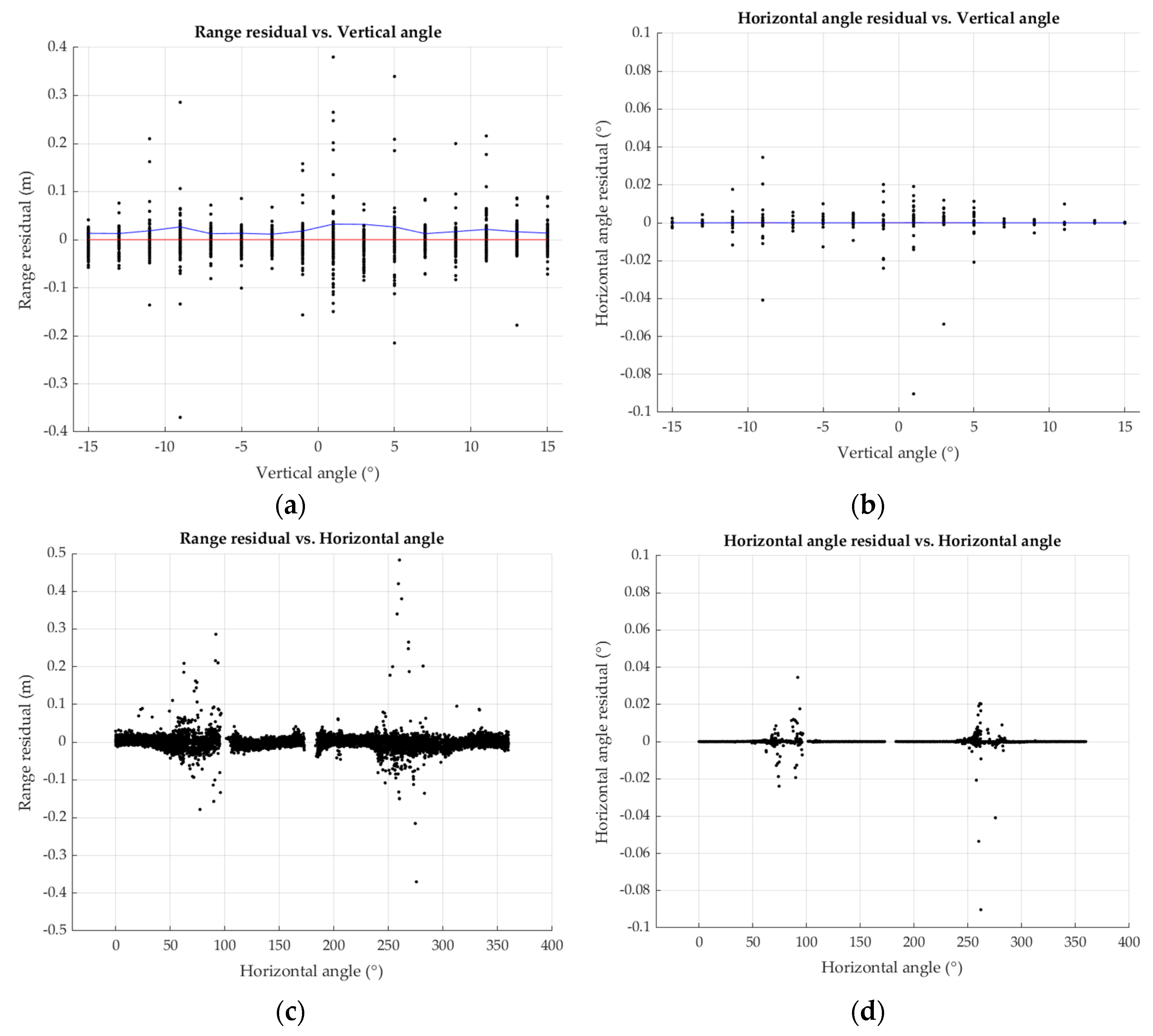
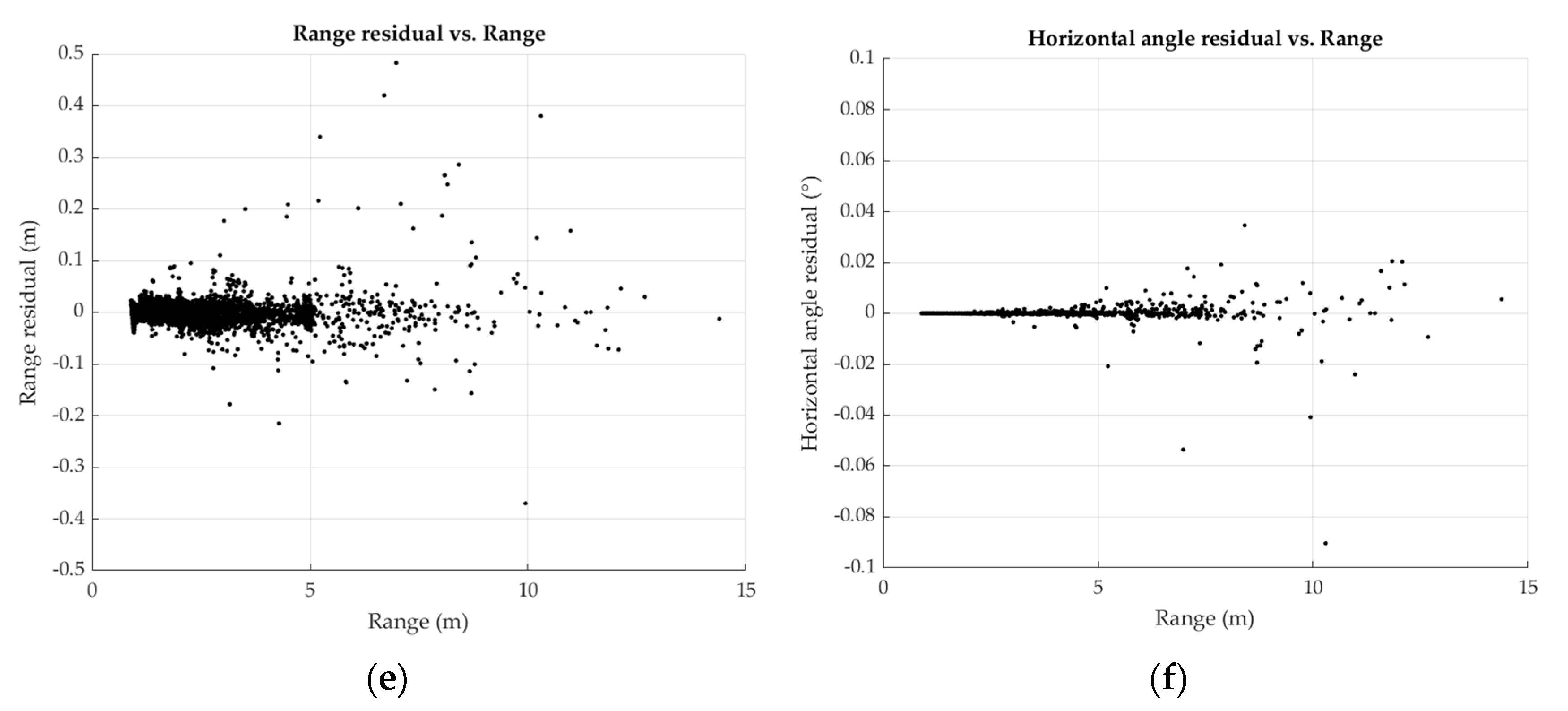
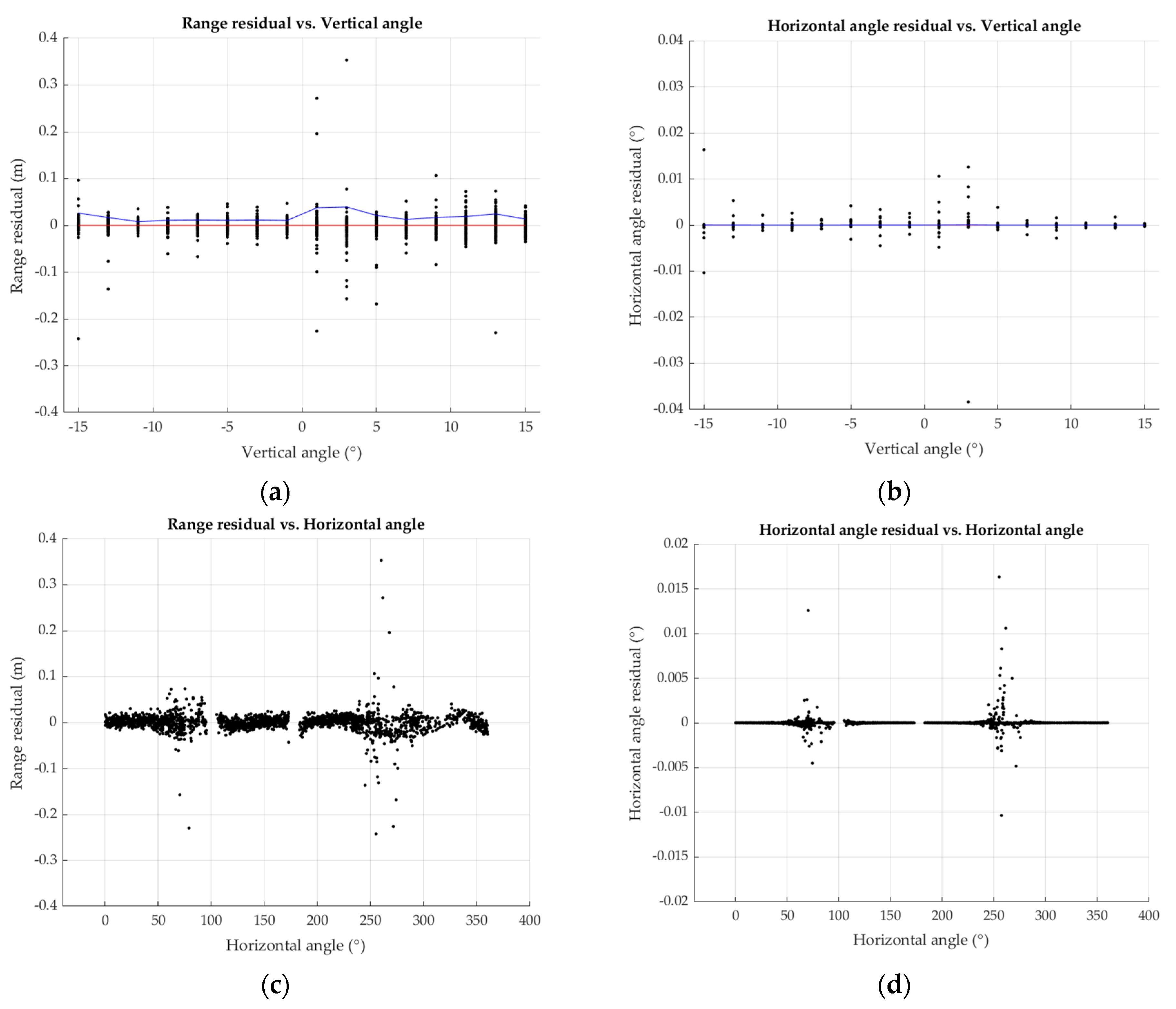
Figure 16.
Measurement residuals of Calibration IV-1: (a,c,e) range residuals; (b,d,f) horizontal angle residuals; red line and blue line in (a,b) mean average and RMSE of residuals, respectively.
Figure 16.
Measurement residuals of Calibration IV-1: (a,c,e) range residuals; (b,d,f) horizontal angle residuals; red line and blue line in (a,b) mean average and RMSE of residuals, respectively.
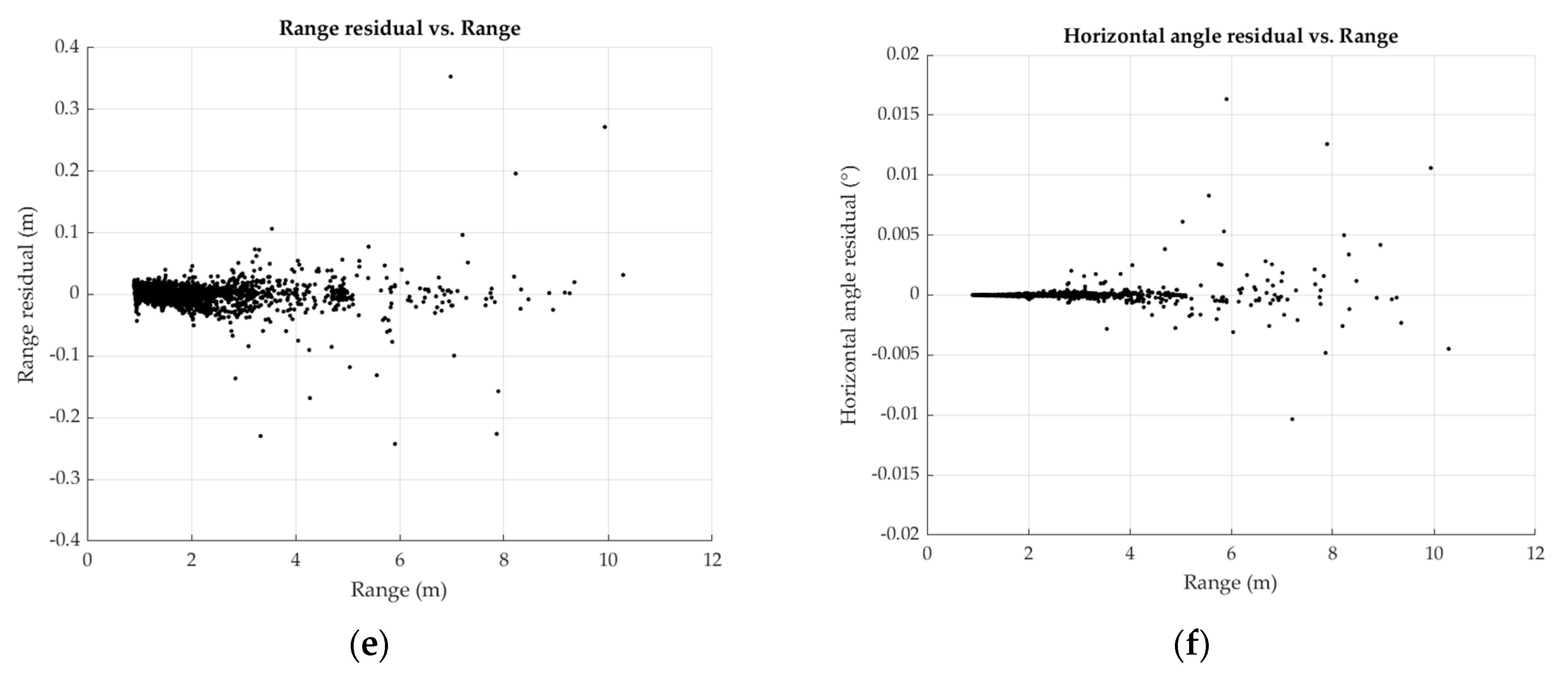
Figure 17.
Measurement residuals of Calibration IV-2: (a,c,e) range residuals; (b,d,f) horizontal angle residuals; red line and blue line in (a,b) mean average and RMSE of residuals, respectively.
Figure 17.
Measurement residuals of Calibration IV-2: (a,c,e) range residuals; (b,d,f) horizontal angle residuals; red line and blue line in (a,b) mean average and RMSE of residuals, respectively.
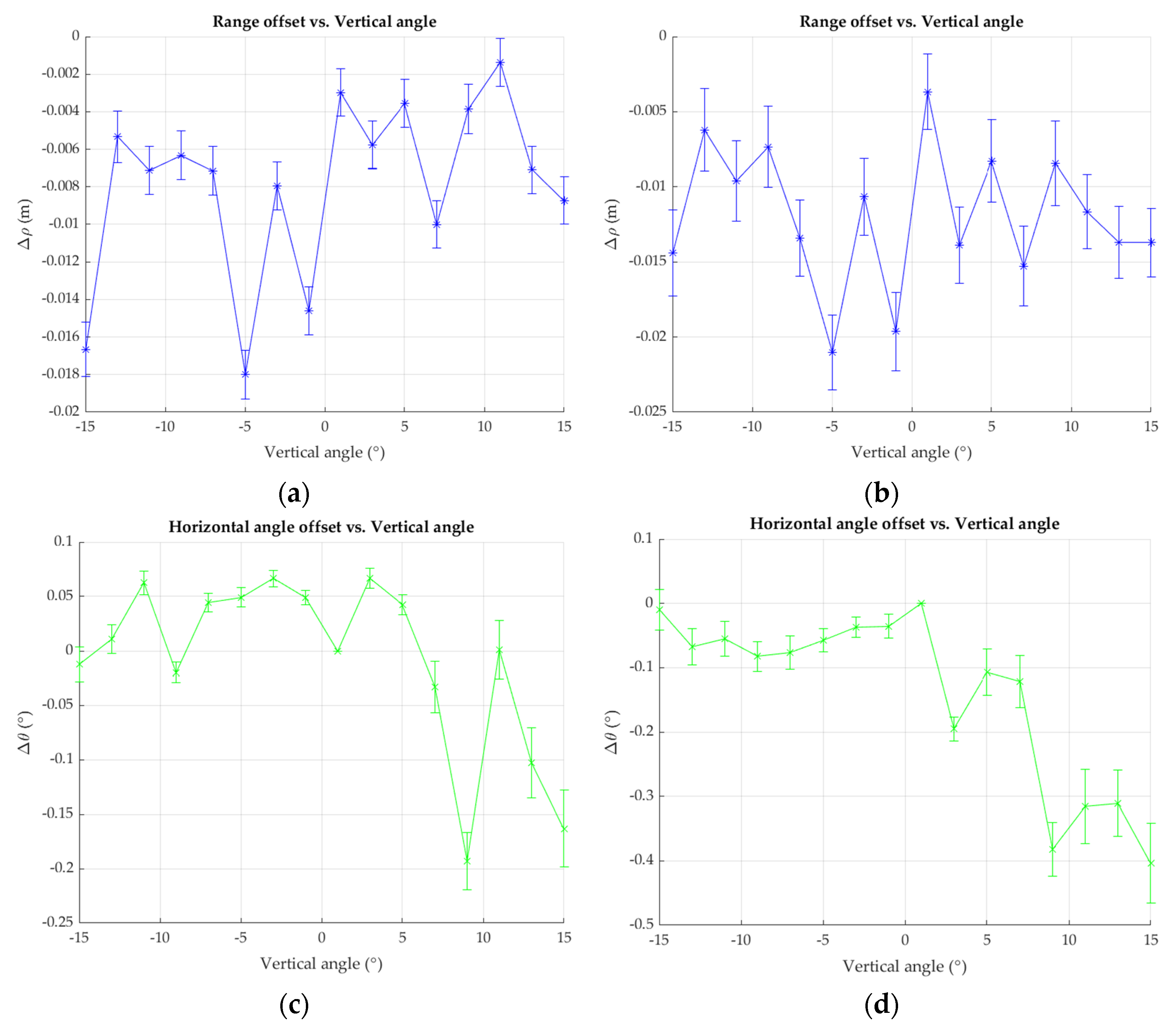
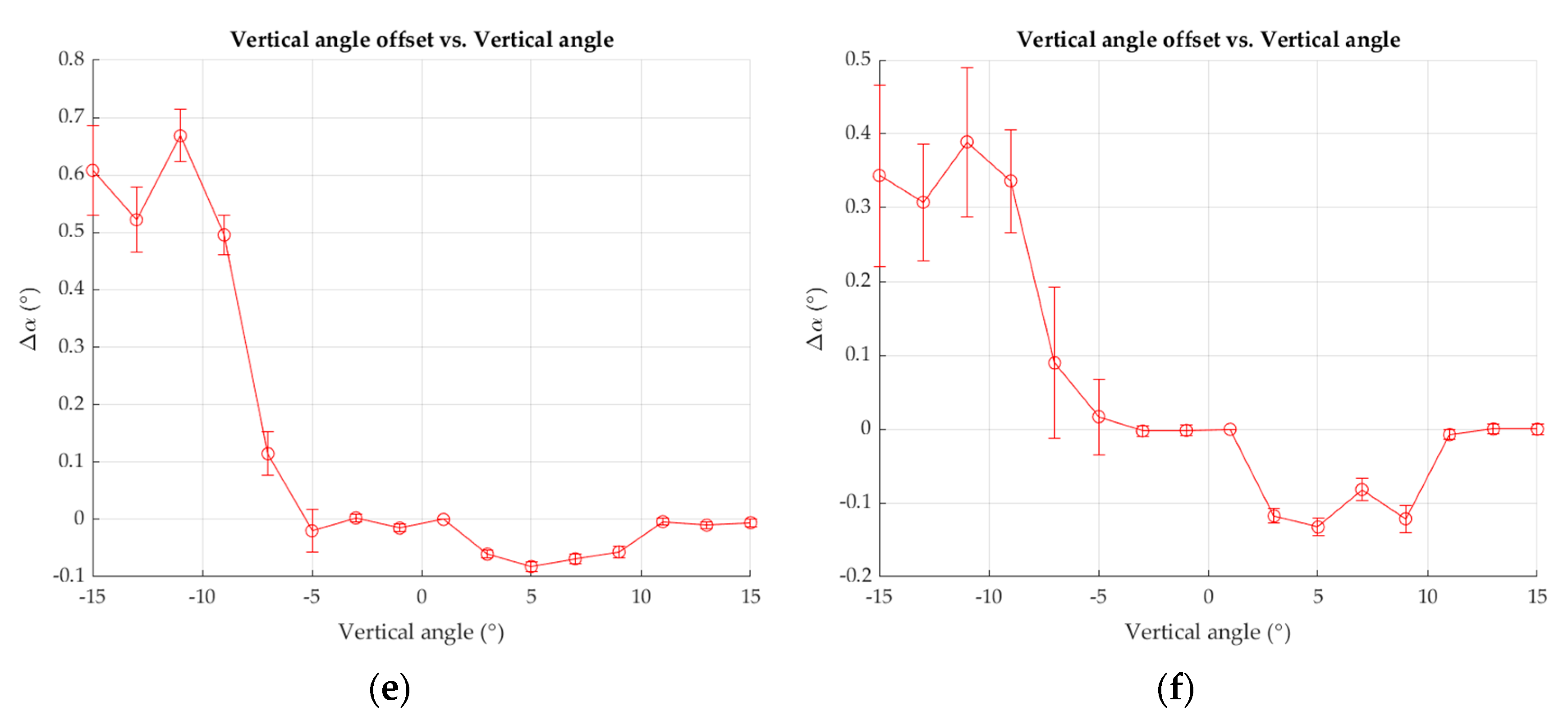
Figure 18.
Estimated AP values and their standard deviations versus vertical angle: (a,c,e) Calibration IV-1; (b,d,f) Calibration IV-2.
Figure 18.
Estimated AP values and their standard deviations versus vertical angle: (a,c,e) Calibration IV-1; (b,d,f) Calibration IV-2.
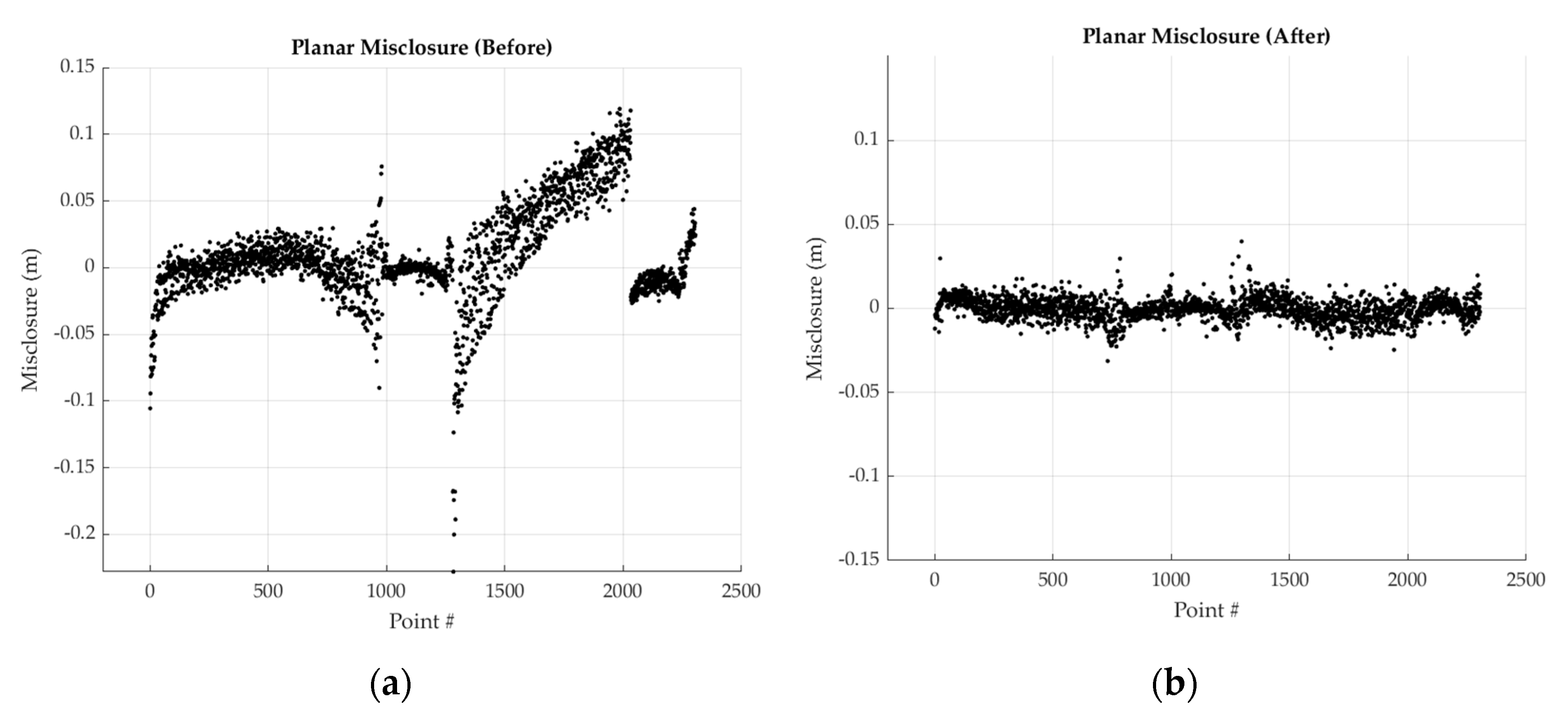
Figure 19.
Planar misclosure before and after the adjustment: (a) before Calibration V; (b) after Calibration V.
Figure 19.
Planar misclosure before and after the adjustment: (a) before Calibration V; (b) after Calibration V.
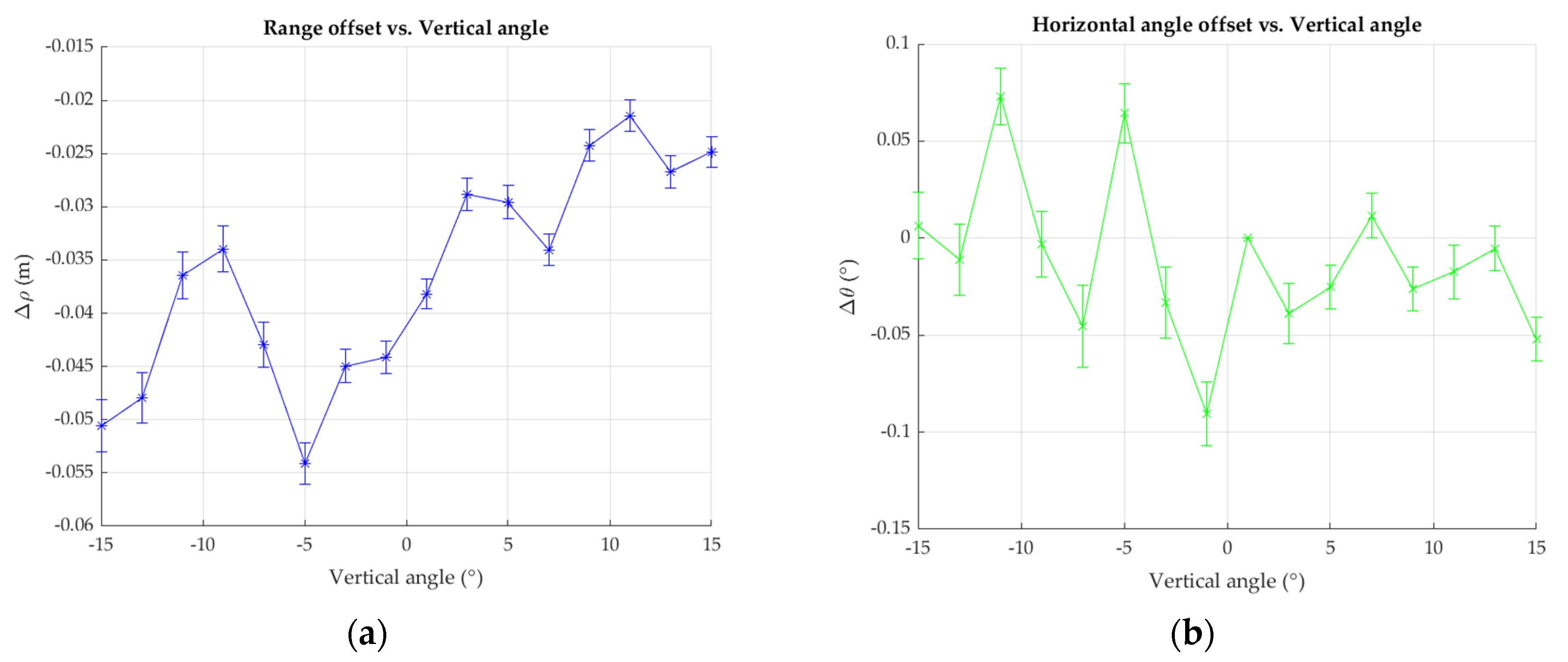
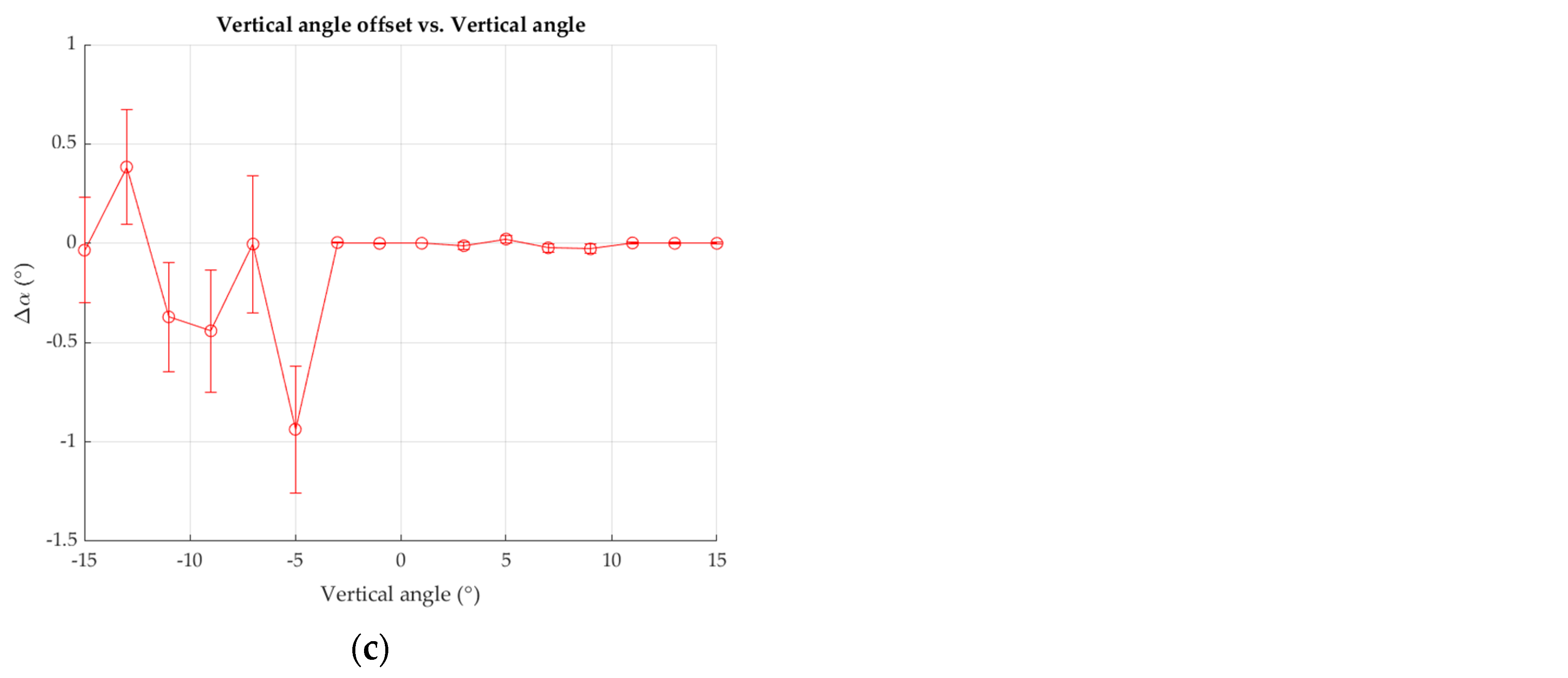
Figure 20.
Estimated AP values and their standard deviations versus vertical angle for Calibration V: (a) range offset; (b) horizontal angle offset; (c) vertical angle offset.
Figure 20.
Estimated AP values and their standard deviations versus vertical angle for Calibration V: (a) range offset; (b) horizontal angle offset; (c) vertical angle offset.
Table 1.
Specifications of Velodyne VLP-16.
Table 1.
Specifications of Velodyne VLP-16.
| Specification |
|---|
| Channels | 16 lasers |
| Range | Up to 100 m |
| Range Accuracy | Up to ±3 cm |
| FOV (Vertical) | +15.0° to −15.0° (30.0°) |
| Angular Resolution (Vertical) | 2.0° |
| FOV (Horizontal) | 360° |
| Angular Resolution (Horizontal) | 0.1°–0.4° |
| Rotation Rate | 5 Hz–20 Hz |
Table 2.
Specifications of Trimble APX-15 UAV.
Table 2.
Specifications of Trimble APX-15 UAV.
| | Specification |
| Size (mm) | 67 L × 60 W × 15 H |
| Weight | 60 g |
| IMU data rate | 200 Hz |
| | SPS | DGPS | RTK | Post-Processed |
| Position (m) | 1.5–3.0 | 0.5–2.0 | 0.02–0.05 | 0.02–0.05 |
| Velocity (m/s) | 0.05 | 0.05 | 0.02 | 0.015 |
| Roll & Pitch (deg) | 0.04 | 0.03 | 0.03 | 0.025 |
| True Heading (deg) | 0.30 | 0.28 | 0.18 | 0.080 |
Table 3.
Specifications of fisheye lens camera.
Table 3.
Specifications of fisheye lens camera.
| | Lens | Camera Body |
|---|
| Model | Sunnex DSL315 | CM3-U3-31S4C |
| Projection Model | Equisolid angle projection |
| Image Size (pixel) | 2048 × 1536 |
| Pixel Size (mm) | 0.00345 |
| Focal Length (mm) | 2.67 |
Table 4.
Specifications of the stereo camera.
Table 4.
Specifications of the stereo camera.
| | Lens | Camera Body |
|---|
| Model | KOWA LM5JCM | CM3-U3-50S5C |
| Projection Model | Perspective |
| Image Size (pixel) | 2448 × 2048 |
| Pixel Size (mm) | 0.00345 |
| Focal Length (mm) | 5 |
Table 5.
Summary of least squares solution.
Table 5.
Summary of least squares solution.
| Category | Formula |
|---|
| Conditions | m = i |
| Unknowns | u = 6 × (j − 1) + (3n − 2) + 4k |
| Observations | l = 2i |
| Constraints | c = k |
| Degree of Freedom | r = m − u + c |
Table 6.
Given systematic error level for simulation experiments.
Table 6.
Given systematic error level for simulation experiments.
| AP | Values |
|---|
| (m) | 0.03 |
| () | 0.1 |
| () | 0.1 |
Table 7.
Summary of Calibration I (reducing the number of scans).
Table 7.
Summary of Calibration I (reducing the number of scans).
| | Used Scans | Used Planes | Total Points | Used Points | Redundancy |
|---|
| I-1 | 1, 2, 3, 4, 5, 6, and 7 | 1, 2, 3, 4, 5, and 6 | 202,608 | 2048 | 1948 |
| I-2 | 1, 3, 4, 5, 6, and 7 | 173,664 | 2048 | 1954 |
| I-3 | 1, 3, 5, 6, and 7 | 144,720 | 2048 | 1960 |
| I-4 | 1, 3, 6, and 7 | 115,776 | 2048 | 1966 |
| I-5 | 1 and 3 | 57,888 | 2048 | 1978 |
| I-6 | 6 and 7 | 57,888 | 2048 | 1978 |
Table 8.
Summary of Calibration II (reducing the length of the corridor and the number of planes).
Table 8.
Summary of Calibration II (reducing the length of the corridor and the number of planes).
| | Dimensions (m) | Used Planes | Total Points | Used Points | Redundancy | Convergence |
|---|
| II-1 | 15 × 5 × 3 | 1, 2, 3, 4, 5, and 6 | 57,888 | 2048 | 1978 | O |
| II-2 | 14 × 5 × 3 | O |
| II-3 | 13 × 5 × 3 | O |
| II-4 | 12 × 5 × 3 | O |
| II-5 | 11 × 5 × 3 | O |
| II-6 | 10 × 5 × 3 | O |
| II-7 | 9 × 5 × 3 | O |
| II-8 | 8 × 5 × 3 | O |
| II-9 | 7 × 5 × 3 | 2, 3, 4, 5, and 6 | 48,407 | 2046 | 1979 | O |
| II-10 | 7 × 5 × 3 | 2, 3, 5, and 6 | 35,446 | 2048 | 1984 | O |
| II-11 | 7 × 5 × 3 | 2, 3, 4, and 5 | 38,683 | 2046 | 1982 | O |
| II-12 | 7 × 5 × 3 | 2, 3, and 5 | 22,550 | 2048 | 1987 | O |
| II-13 | 7 × 5 × 3 | 2 and 6 | 14,194 | 2048 | 1990 | X |
| II-14 | 7 × 5 × 3 | 2 and 3 | 11,040 | 2048 | 1990 | X |
Table 9.
Summary of Calibration III (Reducing points).
Table 9.
Summary of Calibration III (Reducing points).
| | Used Planes | Total Points | Used Points | Reduction (%) | Redundancy |
|---|
| III-1 | 2, 3, and 5 | 22,550 | 11,275 | 50 | 11,214 |
| III-2 | 9020 | 60 | 8959 |
| III-3 | 6765 | 70 | 6704 |
| III-4 | 4510 | 80 | 4449 |
| III-5 | 2255 | 90 | 2194 |
| III-6 | 1128 | 95 | 1067 |
| III-7 | 902 | 96 | 841 |
| III-8 | 677 | 97 | 616 |
| III-9 | 451 | 98 | 390 |
| III-10 | 226 | 99 | 165 |
Table 10.
Summary of Calibration IV.
Table 10.
Summary of Calibration IV.
| | Used Planes | Total Points | Used Points | Redundancy |
|---|
| IV-1 | 1, 2, 3, 4, 5, 6, 7, and 8 | 54,867 | 8140 | 8067 |
| IV-2 | 1, 3, and 5 | 41,259 | 2308 | 2247 |
Table 11.
Summary of planar misclosure before and after Calibration IV-1 and IV-2.
Table 11.
Summary of planar misclosure before and after Calibration IV-1 and IV-2.
| | | Min (m) | Max (m) | Mean (m) | RMSE (m) | Improvement (%) |
|---|
| IV-1 | Before | −0.147 | 0.052 | 0.002 | 0.014 | 35.7 |
| After | −0.075 | 0.070 | 0.000 | 0.009 |
| IV-2 | Before | −0.049 | 0.106 | −0.003 | 0.015 | 53.3 |
| After | −0.048 | 0.047 | 0.000 | 0.007 |
Table 12.
Averaged correlation coefficients between exterior orientation parameters (EOPs) and APs for Calibration IV-1.
Table 12.
Averaged correlation coefficients between exterior orientation parameters (EOPs) and APs for Calibration IV-1.
| | | | | | | | | | |
|---|
| | 0.077 | 0.039 | 0.050 | 0.074 | 0.041 | 0.045 | 0.030 | 0.012 |
| | | 0.056 | 0.099 | 0.083 | 0.666 | 0.086 | 0.284 | 0.023 |
| | | | 0.458 | 0.761 | 0.080 | 0.034 | 0.070 | 0.139 |
| | | | | 0.067 | 0.277 | 0.048 | 0.059 | 0.183 |
| | | | | | 0.070 | 0.093 | 0.086 | 0.148 |
| | | | | | | 0.032 | 0.191 | 0.138 |
| | | | | | | | 0.080 | 0.046 |
| | | | | | | | | 0.070 |
Table 13.
Averaged correlation coefficients between EOPs and APs for Calibration IV-2.
Table 13.
Averaged correlation coefficients between EOPs and APs for Calibration IV-2.
| | | | | | | | | | |
|---|
| | 0.032 | 0.099 | 0.041 | 0.049 | 0.098 | 0.064 | 0.061 | 0.015 |
| | | 0.033 | 0.183 | 0.024 | 0.675 | 0.151 | 0.270 | 0.019 |
| | | | 0.553 | 0.721 | 0.096 | 0.084 | 0.054 | 0.128 |
| | | | | 0.146 | 0.088 | 0.038 | 0.057 | 0.148 |
| | | | | | 0.081 | 0.151 | 0.085 | 0.130 |
| | | | | | | 0.175 | 0.154 | 0.123 |
| | | | | | | | 0.093 | 0.097 |
| | | | | | | | | 0.082 |
Table 14.
Estimated parameters and their standard deviation for Calibration IV-1 and IV-2.
Table 14.
Estimated parameters and their standard deviation for Calibration IV-1 and IV-2.
| | Estimated Values |
| | Calibration IV-1 | Calibration IV-2 |
| (m) | 2.8760.002 | 2.8700.003 |
| (m) | 0.6890.001 | 0.6860.002 |
| (m) | 0.105 | 0.1010.001 |
| () | −0.356 | −0.3590.055 |
| () | −0.131 | −0.1330.019 |
| () | −3.078 | −3.0760.017 |
| Laser No. | (m) | () | () | (m) | () | () |
| 0 | −0.0170.001 | −0.0120.016 | 0.6080.078 | −0.0140.003 | −0.0100.032 | 0.3440.123 |
| 1 | −0.0030.001 | - | - | −0.0040.003 | - | - |
| 2 | −0.0050.001 | 0.0110.013 | 0.5220.057 | −0.0060.003 | −0.0680.028 | 0.3080.079 |
| 3 | −0.0060.001 | 0.0670.009 | −0.0610.007 | −0.0140.003 | −0.1950.019 | −0.1180.010 |
| 4 | −0.0070.001 | 0.0630.011 | 0.6680.046 | −0.0100.003 | −0.0550.027 | 0.3890.101 |
| 5 | −0.0040.001 | 0.0420.009 | −0.082 0.008 | −0.0080.003 | −0.1070.036 | −0.1330.012 |
| 6 | −0.0060.001 | −0.020.010 | 0.4960.034 | −0.0070.003 | −0.0820.023 | 0.3370.070 |
| 7 | −0.0100.001 | −0.0330.024 | −0.0690.008 | −0.0150.003 | −0.1220.040 | −0.0820.015 |
| 8 | −0.0070.001 | 0.0440.009 | 0.1140.038 | −0.0130.003 | −0.0770.026 | 0.0900.102 |
| 9 | −0.0040.001 | −0.1930.026 | −0.0570.010 | −0.0080.003 | −0.3820.042 | −0.1210.018 |
| 10 | −0.0180.001 | 0.0490.009 | −0.020.037 | −0.0210.002 | −0.0570.018 | 0.0170.051 |
| 11 | −0.0010.001 | 0.0010.027 | −0.0040.006 | −0.0120.002 | −0.3160.058 | −0.0080.007 |
| 12 | −0.0080.001 | 0.0670.008 | 0.0030.007 | −0.0110.003 | −0.0370.016 | −0.0020.007 |
| 13 | −0.0070.001 | −0.1030.032 | −0.010.006 | −0.0140.002 | −0.3110.052 | 0.0000.007 |
| 14 | −0.0150.001 | 0.0490.007 | −0.0150.007 | −0.0200.003 | −0.0350.018 | −0.0020.007 |
| 15 | −0.0090.001 | −0.1630.035 | −0.0060.006 | −0.0140.002 | −0.4030.062 | 0.0000.007 |
Table 15.
Summary of Calibration V.
Table 15.
Summary of Calibration V.
| | Used Planes | Total Points | Used Points | Redundancy |
|---|
| V | 1, 3, and 5 | 23,049 | 2305 | 2244 |
Table 16.
Summary of planar misclosure before and after Calibration V.
Table 16.
Summary of planar misclosure before and after Calibration V.
| | | Min (m) | Max (m) | Mean (m) | RMSE (m) | Improvement (%) |
|---|
| V | Before | −0.223 | 0.124 | 0.011 | 0.038 | 81.6 |
| After | −0.025 | 0.046 | 0.000 | 0.007 |
Table 17.
Comparison with other self-calibration results.
Table 17.
Comparison with other self-calibration results.
| Approaches | RMSE of Planar Misclosure | Improvement | Sensor |
|---|
| Static | Kinematic |
|---|
| Glennie and Lichti [25] | 0.013 m | | 63.8% | HDL-64E |
| Chen and Chien [28] | 0.013 m | | 40% | HDL-64E |
| Glennie [29] | | 0.023 m | 37.8% | HDL-64E |
| Chan and Lichti [30] | 0.008 m | 0.014 m | 41–71% | HDL-32E |
| Glennie et al. [31] | 0.025 m | | 20% | VLP-16 |
| Proposed | | 0.007 m | 35–81% | VLP-16 |































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}