
Research on Real-Time Joint Stiffness Configuration of a Series Parallel Hybrid 7-DOF Humanoid Manipulator in Continuous Motion



Abstract
:1. Introduction
2. Methods
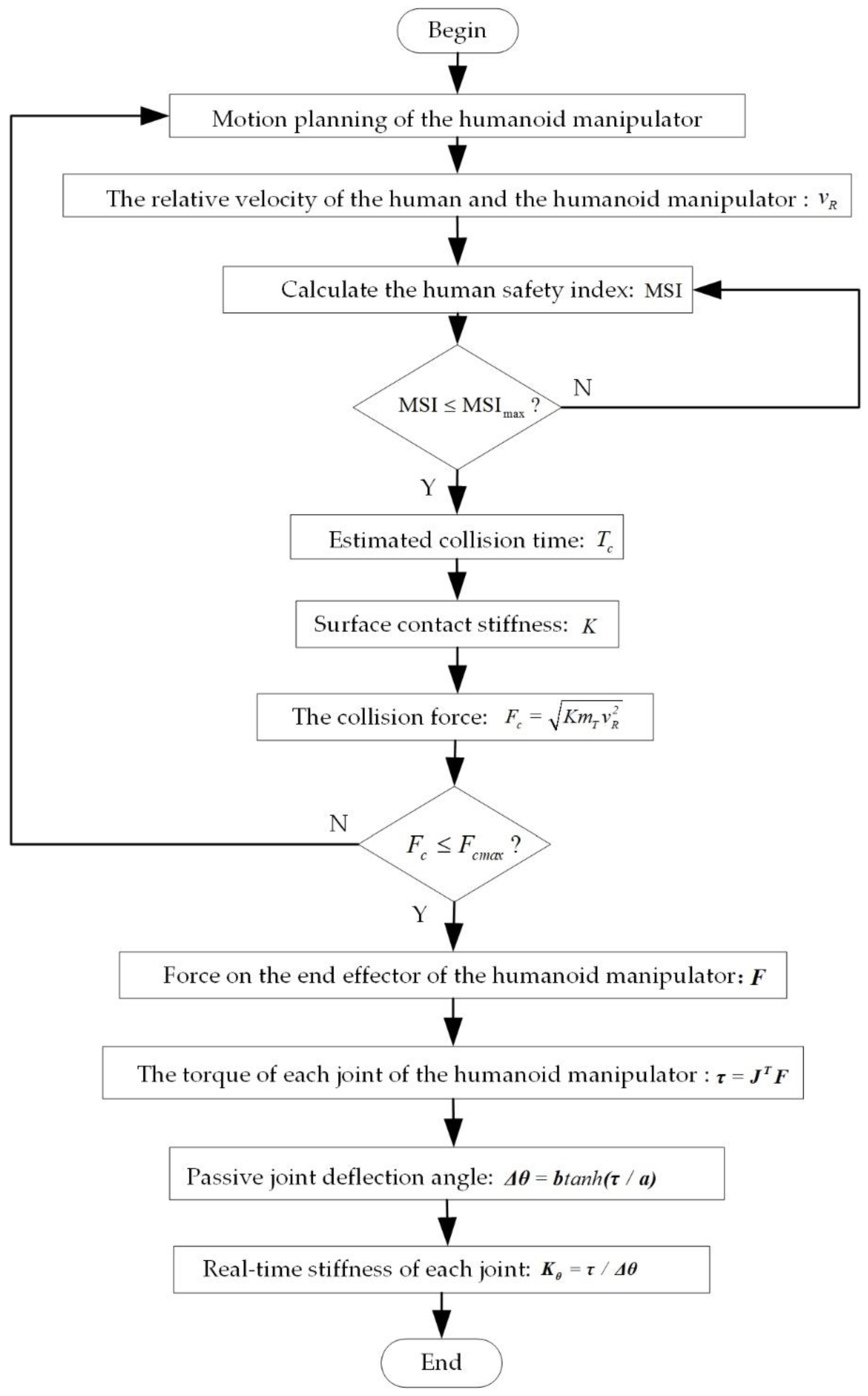
2.1. Real-Time Joint Stiffness Configuration Strategy
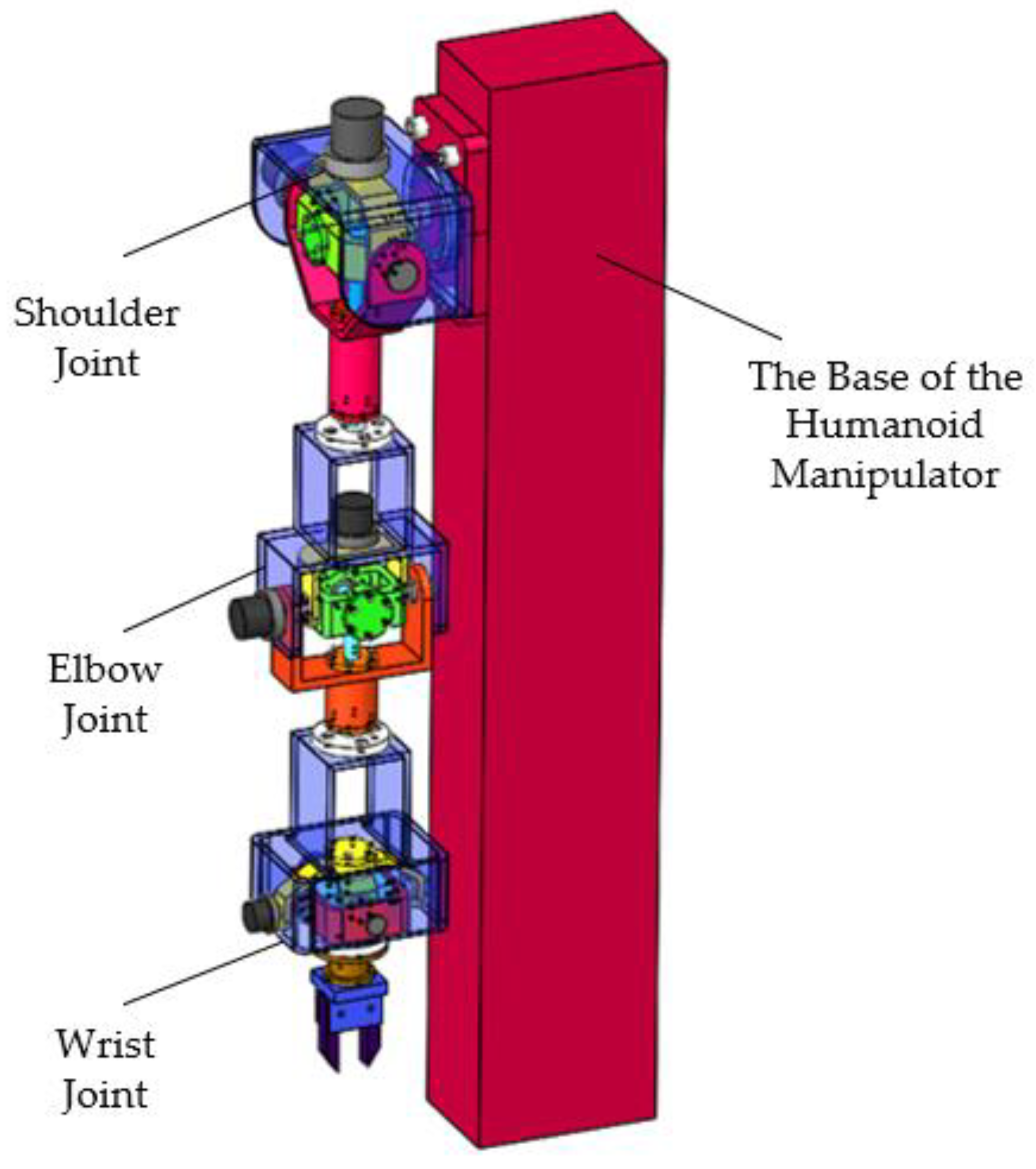
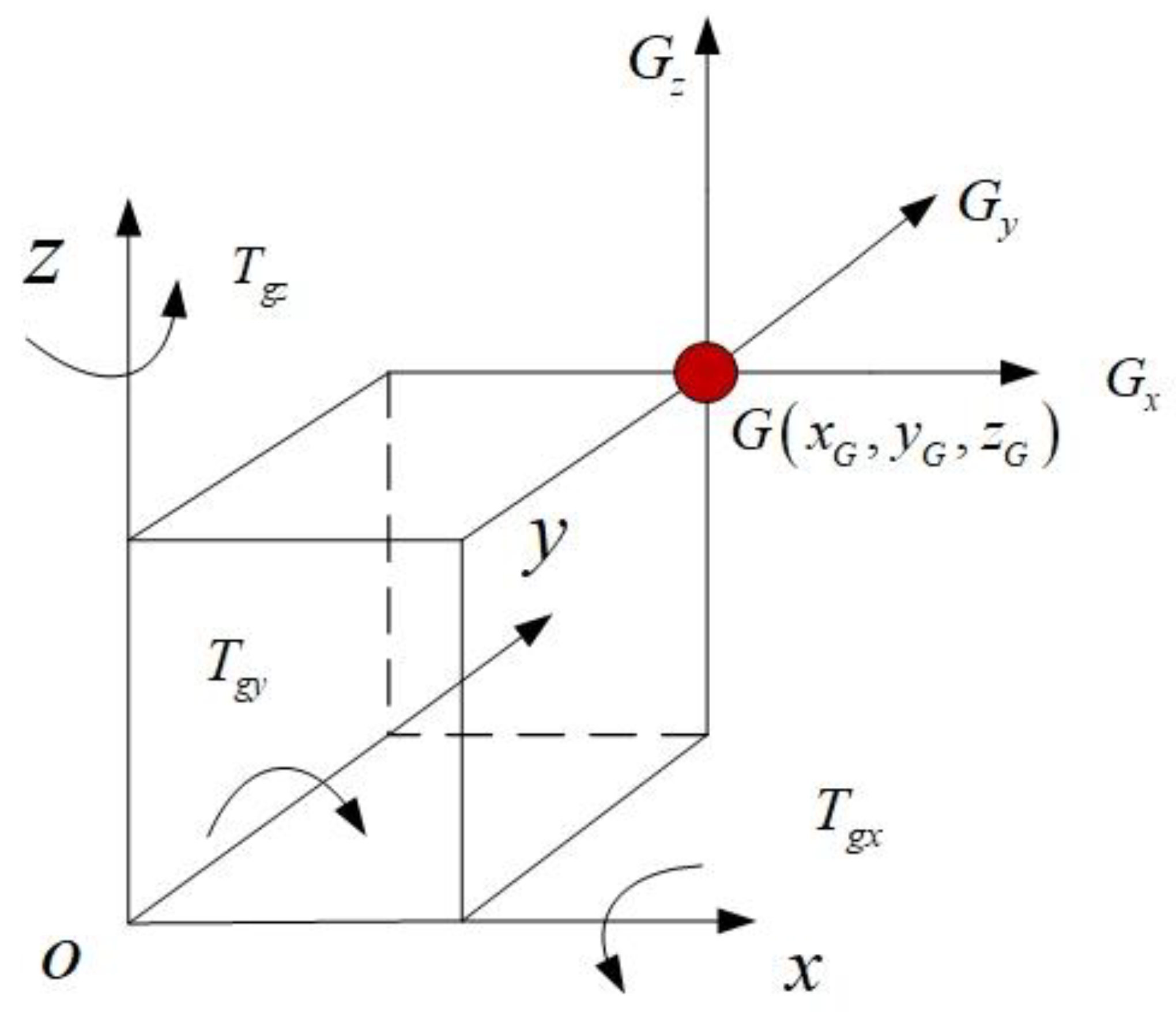
2.2. Structural Model of the Humanoid Manipulator
3. The Joint Space Stiffness and the Cartesian Stiffness
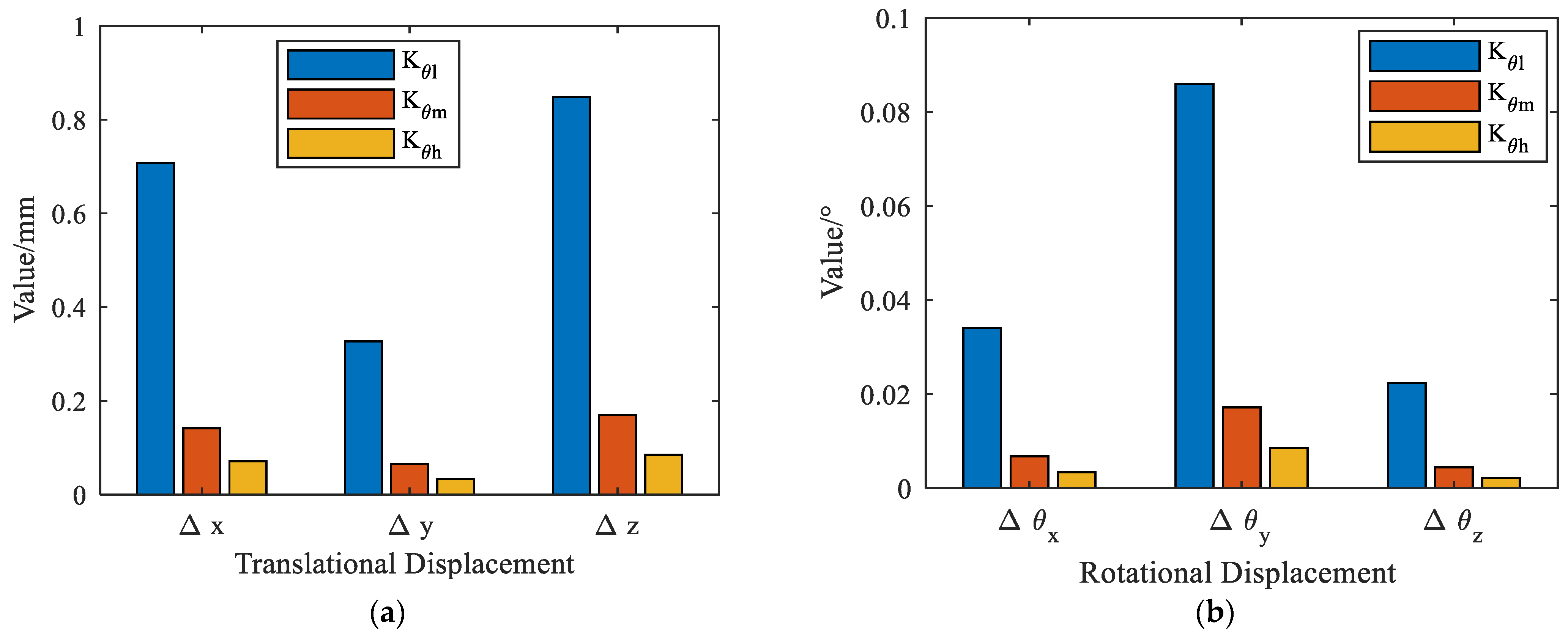
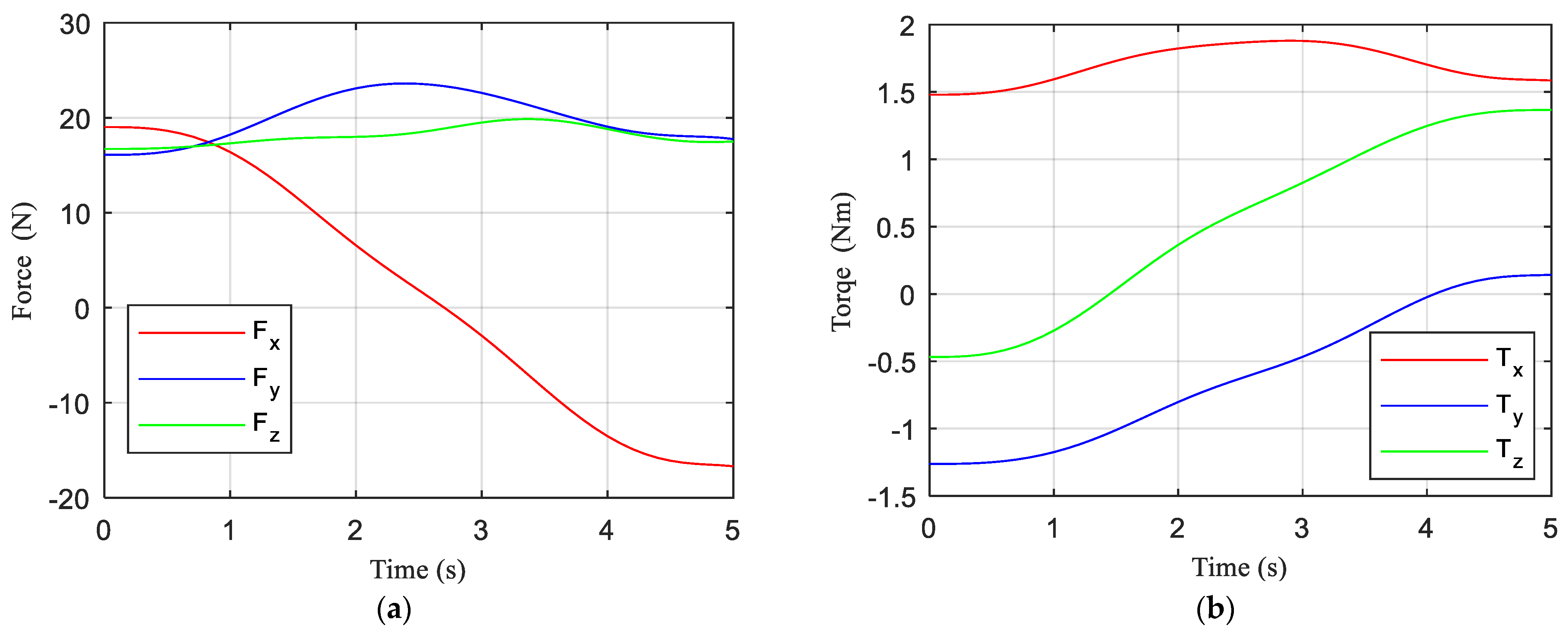
4. Simulation Analysis
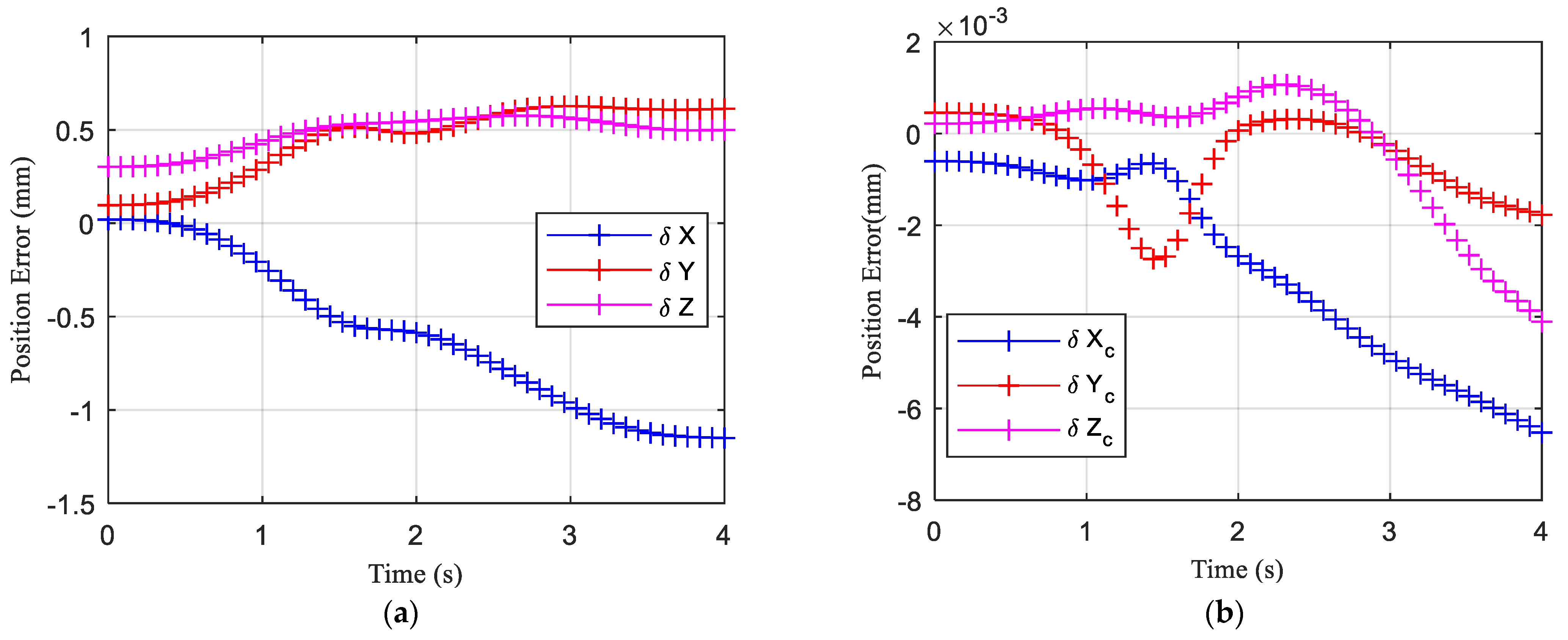
4.1. In the Environment where the Robot Works Alone
4.2. In the Environment of Human-Robot Interaction
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Structure Parameters of the Humanoid Manipulator


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Posture Angle | Range of Motion (°) |
|---|---|
| Flexion and extension angle of shoulder joint | [−160, 40] |
| Abduction and adduction angle of shoulder joint | [−90, 30] |
| External and internal rotation angle of shoulder joint | [−70, 70] |
| Flexion and extension angle of elbow joint | [−150, 10] |
| Pronation and supination angle of elbow joint | [−90, 90] |
| Radial deviation and ulnar deviation of wrist joint | [−40, 40] |
| Dorsal extension and palmar flexion of wrist joint | [−60, 60] |
| The Input Angle of Each Joint | Range of Motion (°) |
|---|---|
| Input angle of shoulder joint | [−160, 40] |
| Input angle of shoulder joint | [−90, 30] |
| Input angle of shoulder joint | [−90, 90] |
| Input angle of elbow joint | [−150, 10] |
| Input angle of elbow joint | [−90, 90] |
| Input angle of wrist joint | [−40, 40] |
| Input angle of wrist joint | [−70, 70] |

Appendix B. Calculation of Gravitational Load

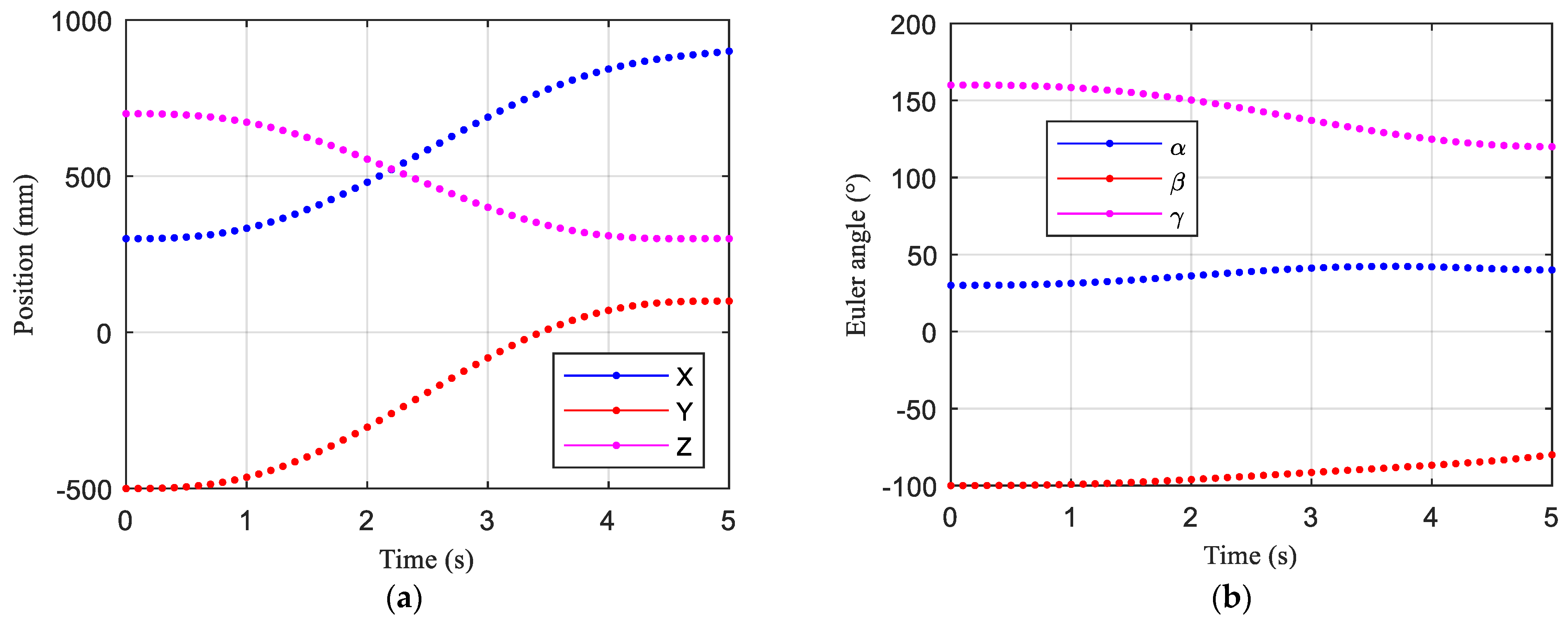
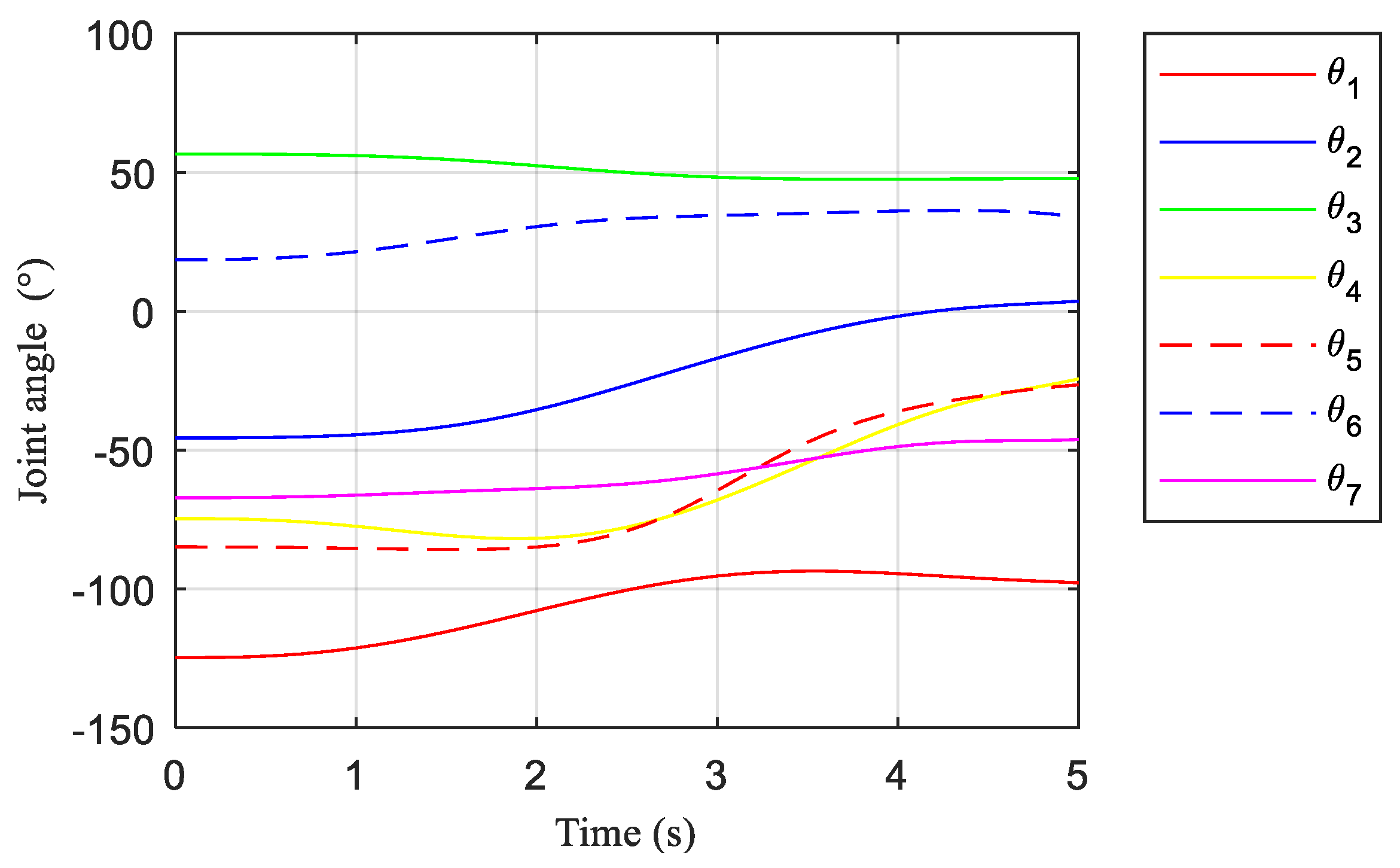
Appendix C. Motion Planning of the Humanoid Manipulator


References
- Chu, M.; Wu, X. Modeling and Self-learning Soft-grasp Control for Free-floating Space Manipulator during Target Capturing using Variable Stiffness Method. IEEE Access 2018, 6, 7044–7054. [Google Scholar] [CrossRef]
- Wolf, S.; Bahls, T.; Chalon, M.; Friedl, W.; Grebenstein, M.; Höppner, H.; Kühne, M.; Lakatos, D.; Mansfeld, N.; Özparpucu, M.C.; et al. Soft robotics with variable stiffness actuators: Tough robots for soft human robot interaction. In Soft Robotics; Verl, A., Albu-Schäffer, A., Brock, O., Raatz, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 231–254. [Google Scholar]
- Baspinar, C. Robust Position/Force Control of Constrained Flexible Joint Robots with Constraint Uncertainties. J. Intell. Robot. Syst. 2020, 100, 945–954. [Google Scholar] [CrossRef]
- Fang, C.; Ajoudani, A.; Bicchi, A.; Tsagarakis, N.G. Online Model Based Estimation of Complete Joint Stiffness of Human Arm. IEEE Robot. Autom. Lett. 2018, 3, 84–91. [Google Scholar] [CrossRef]
- Liu, W.; Chen, D.; Steil, J. Analytical Inverse Kinematics Solver for Anthropomorphic 7-DOF Redundant Manipulators with Human-Like Configuration Constraints. J. Intell. Robot. Syst. 2017, 86, 63–79. [Google Scholar] [CrossRef]
- Tondu, B. Kinematic modelling of anthropomorphic robot upper limb with human-like hands. In Proceedings of the 2009 14th International Conference on Advanced Robotics (ICAR 2009), Munich, Germany, 22–26 June 2009. [Google Scholar]
- Zacharias, F.; Howard, I.S.; Hulin, T.; Hirzinger, G. Workspace comparisons of setup configurations for human-robot interaction. In Proceedings of the 23rd IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Yang, G.; Chen, I.-M.; Yeo, S.H.; Lin, W. Design and Analysis of a Modular Hybrid Parallel-Serial Manipulator for Robotised Deburring Applications. In Smart Devices and Machines for Advanced Manufacturing; Springer: London, UK, 2008; pp. 167–188. [Google Scholar]
- Zhang, L.; Jin, Z.; Li, S. Kinematics analysis and design of a novel spherical orthogonal 3-RRR parallel mechanism. J. Chem. Pharm. Res. 2014, 6, 2470–2476. [Google Scholar]
- Zhang, L.; Jin, Z.; Li, S. Dimensional Synthesis and Design of a Shoulder Joint for Fruit and Vegetable Harvesting Manipulator. J. Softw. Eng. 2015, 9, 392–400. [Google Scholar] [CrossRef] [Green Version]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Pittsburgh, PA, USA, 5–9 August 1995; pp. 399–406. [Google Scholar]
- Tonietti, G.; Schiavi, R.; Bicchi, A. Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction. In Proceedings of the IEEE Int. Conf. on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 528–533. [Google Scholar]
- Hurst, J.W.; Chestnutt, J.; Rizzi, A.A. The actuator with mechanically adjustable series compliance. IEEE Trans. Robot. 2010, 26, 597–606. [Google Scholar] [CrossRef]
- Awad, M.I.; Gan, D.; Cempini, M.; Cortese, M.; Vitiello, N.; Dias, J.; Dario, P.; Seneviratne, L. Modeling, design and characterization of a novel passive variable stiffness joint (pVSJ). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 323–329. [Google Scholar]
- Wolf, S.; Eiberger, O.; Hirzinger, G. The DLR FSJ: Energy based design of a variable stiffness joints. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 5082–5089. [Google Scholar]
- Choi, J.; Hong, S.; Lee, W.; Kang, S.; Kim, M. A Robot Joint with Variable Stiffness Using Leaf Springs. IEEE Trans. Robot. 2011, 27, 229–238. [Google Scholar] [CrossRef]
- Hussain, I.; Albalasie, A.; Awad, M.I.; Seneviratne, L.; Gan, D. Modeling, Control, and Numerical Simulations of a Novel Binary-Controlled Variable Stiffness Actuator (BcVSA). Front. Robot. AI 2018, 5, 68. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Groothuis, S.; Carloni, R.; Stramigioli, S. A Novel Variable Stiffness Mechanism Capable of an Infinite Stiffness Range and Unlimited Decoupled Output Motion. Actuators 2014, 3, 107–123. [Google Scholar] [CrossRef]
- ISO/TS 15066:2016. Robots and Robotic Devices—Collaborative Robots. International Organization for Standardization, Standard ISO/TS 15066:2016. February 2016. Available online: https://www.iso.org/standard/62996.html (accessed on 10 February 2021).
- Rosenstrauch, M.J.; Kruger, J. Safe human-robot-collaboration-introduction and experiment using ISO/TS 15066. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; pp. 740–744. [Google Scholar]
- Anvaripour, M.; Saif, M. Collision Detection for Human-Robot Interaction in an Industrial Setting using Force Myography and a Deep Learning Approach. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2149–2154. [Google Scholar]
- Nascimiento, H.; Mujica, M.; Benoussaad, M. Collision Avoidance Interaction Between Human and a Hidden Robot Based on Kinect and Robot Data Fusion. IEEE Robot. Autom. Lett. 2020, 6, 88–94. [Google Scholar] [CrossRef]
- Melia, M.; Schmidt, M.; Geissler, B.; König, J.; Krahn, U.; Ottersbach, H.J.; Letzel, S.; Muttray, A. Measuring mechanical pain: The refinement and standardization of pressure pain threshold measurements. Behav. Res. Methods 2015, 47, 216–227. [Google Scholar] [CrossRef] [PubMed]
- Melia, M.; Geissler, B.; König, J.; Ottersbach, H.J.; Umbreit, M.; Letzel, S.; Muttray, A. Pressure pain thresholds: Subject factors and the meaning of peak pressures. Eur. J. Pain 2019, 23, 167–182. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bicchi, A.; Tonietti, G. Fast and “soft-arm” tactics: Dealing with the safety-performance tradeoff in robot arms design and control. Ieee Robot. Autom. Mag. 2004, 11, 22–33. [Google Scholar] [CrossRef]
- Gao, D.; Wampler, C.W. Head injury criterion. Ieee Robot. Autom. Mag. 2009, 16, 71–74. [Google Scholar] [CrossRef]
- Kuli, D.; Croft, E. Pre-collision safety strategies for human-robot interaction. Auton. Robot. 2007, 22, 149–164. [Google Scholar] [CrossRef]
- Kim, K.H.; Park, I.J.; Choi, J.H.; Rhim, S. Evaluation of head-collision safety of a 7-DOF manipulator according to posture variation. Multibody Syst. Dyn. 2016, 37, 95–105. [Google Scholar] [CrossRef]
- Xiong, G.; Ding, Y.; Zhu, L.M. Stiffness-based Pose Optimization of an Industrial Robot for Five-axis Milling. Robot. Comput. Integr. Manuf. 2019, 55, 19–28. [Google Scholar] [CrossRef]
- Singh, A.P.; Padayachee, J.; Bright, G. Joint Stiffness and Link Deflection Identification of Serial Robotic Manipulators and End-Effectors. In Proceedings of the 2019 Southern African Universities Power Engineering Conference/Robotics and Mechatronics/Pattern Recognition Association of South Africa (SAUPEC/RobMech/PRASA), Bloemfontein, South Africa, 28–30 January 2019; pp. 6–11. [Google Scholar]
- Doriot, N.; Wang, X. Effects of age and gender on maximum voluntary range of motion of the upper body joints. Ergonomics 2006, 49, 269–281. [Google Scholar] [CrossRef] [PubMed]
- Bertomeu-Motos, A.; Lledó, L.D.; Díez, J.A.; Catalan, J.M.; Ezquerro, S.; Badesa, F.J.; Garcia-Aracil, N. Estimation of Human Arm Joints Using Two Wireless Sensors in Robotic Rehabilitation Tasks. Sensors 2015, 15, 30571–30583. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suarez, A.; Jimenez-Cano, A.E.; Vega, V.M.; Heredia, G.; Rodriguez-Castaño, A.; Ollero, A. Lightweight and human-size dual arm aerial manipulator. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1778–1784. [Google Scholar]













| 0.553 | 0.040 | 3.15 s | 0.155 s | 149.76 | ||
| 0.322 | 0.039 | 5.46 s | 0.09 s | 149.91 |
| − | |||||
| − | − | ||||
| − | − | − | |||
| − | − | − | |||
| − | − | − |
| With stiffness strategy | 0.034 | |
| Without stiffness strategy | 0.085 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Wei, S.; Sheng, H.; Zhang, Y. Research on Real-Time Joint Stiffness Configuration of a Series Parallel Hybrid 7-DOF Humanoid Manipulator in Continuous Motion. Appl. Sci. 2021, 11, 2433. https://doi.org/10.3390/app11052433
Yu Y, Wei S, Sheng H, Zhang Y. Research on Real-Time Joint Stiffness Configuration of a Series Parallel Hybrid 7-DOF Humanoid Manipulator in Continuous Motion. Applied Sciences. 2021; 11(5):2433. https://doi.org/10.3390/app11052433
Chicago/Turabian StyleYu, Yang, Shimin Wei, Haiyan Sheng, and Yingkun Zhang. 2021. "Research on Real-Time Joint Stiffness Configuration of a Series Parallel Hybrid 7-DOF Humanoid Manipulator in Continuous Motion" Applied Sciences 11, no. 5: 2433. https://doi.org/10.3390/app11052433
APA StyleYu, Y., Wei, S., Sheng, H., & Zhang, Y. (2021). Research on Real-Time Joint Stiffness Configuration of a Series Parallel Hybrid 7-DOF Humanoid Manipulator in Continuous Motion. Applied Sciences, 11(5), 2433. https://doi.org/10.3390/app11052433