
A Minimal GBT Model for Distortional-Twist Elastic Analysis of Box-Girder Bridges



Abstract
:1. Introduction
2. Background
2.1. Beam Theory
2.2. GBT Theory
3. A Minimal GBT Model
3.1. Torsional Mode
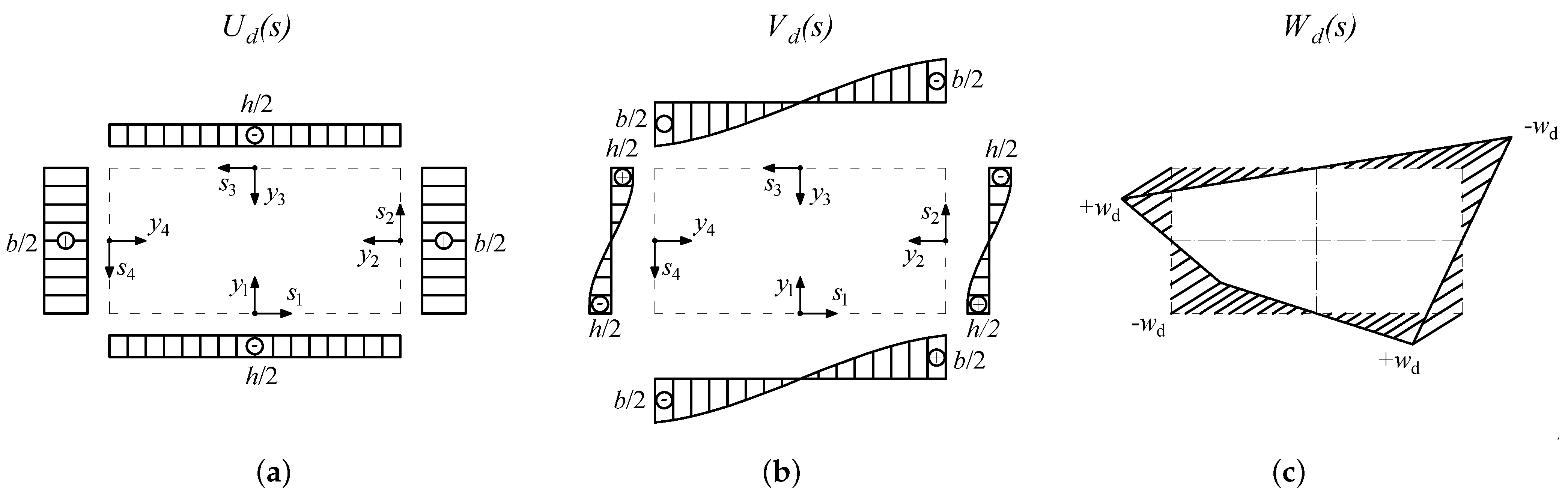
3.2. Distortional Mode
3.3. GBT Equations
- since and are step-wise constant, , and therefore (i.e., no in-plane dilatation occurs);
- since is step-wise linear and quadratic, then , so that only in matrix ;
- since (torsional shear different from zero) and (distortional shear zero), then , so that only in matrix ; the implications on stresses of will be discussed ahead.
3.4. Stresses
4. Algorithmic Aspects
4.1. Order of Magnitude of the Coefficients and Unknowns
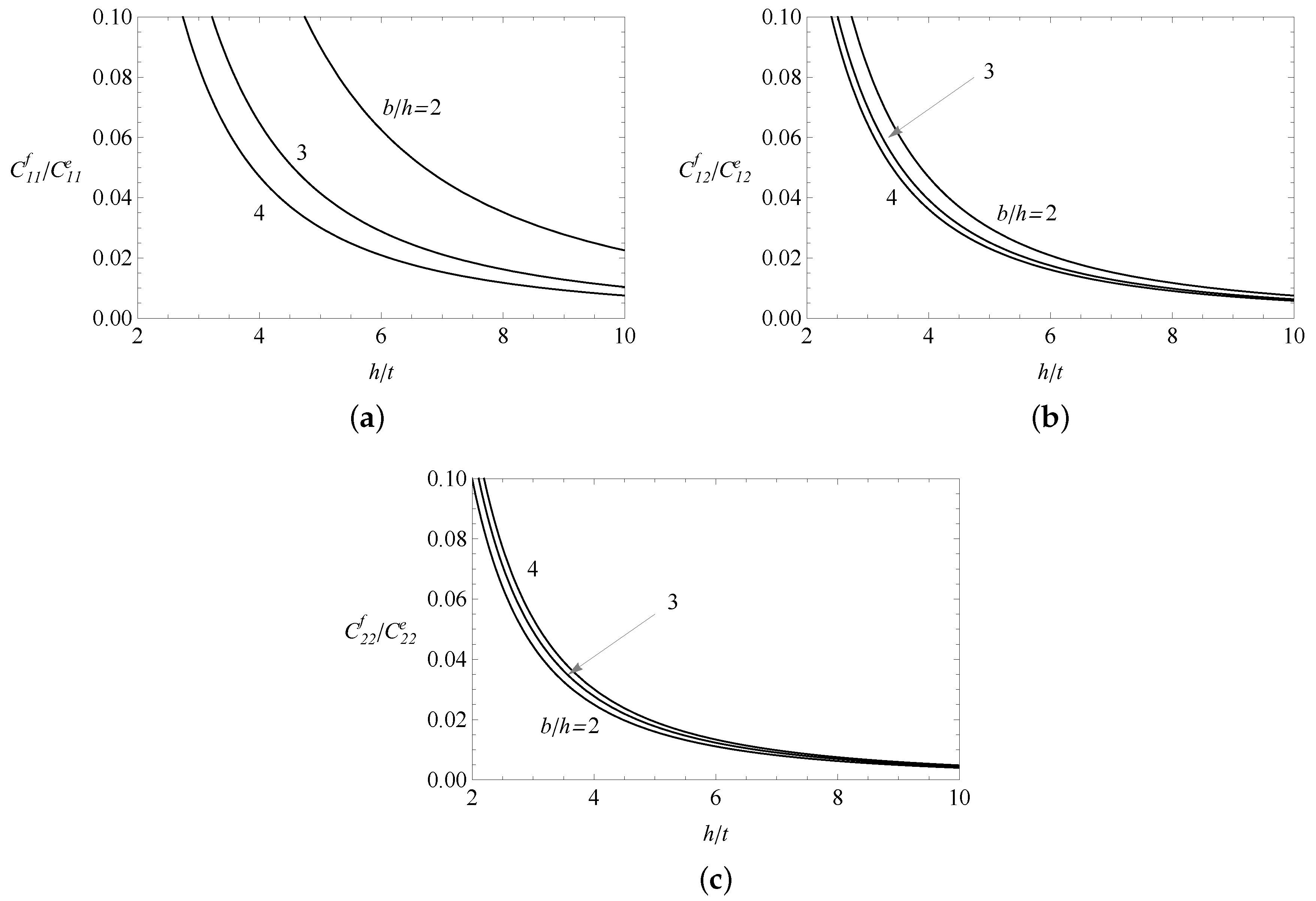
4.1.1. Flexural vs. Extensional Higher-Order Derivatives
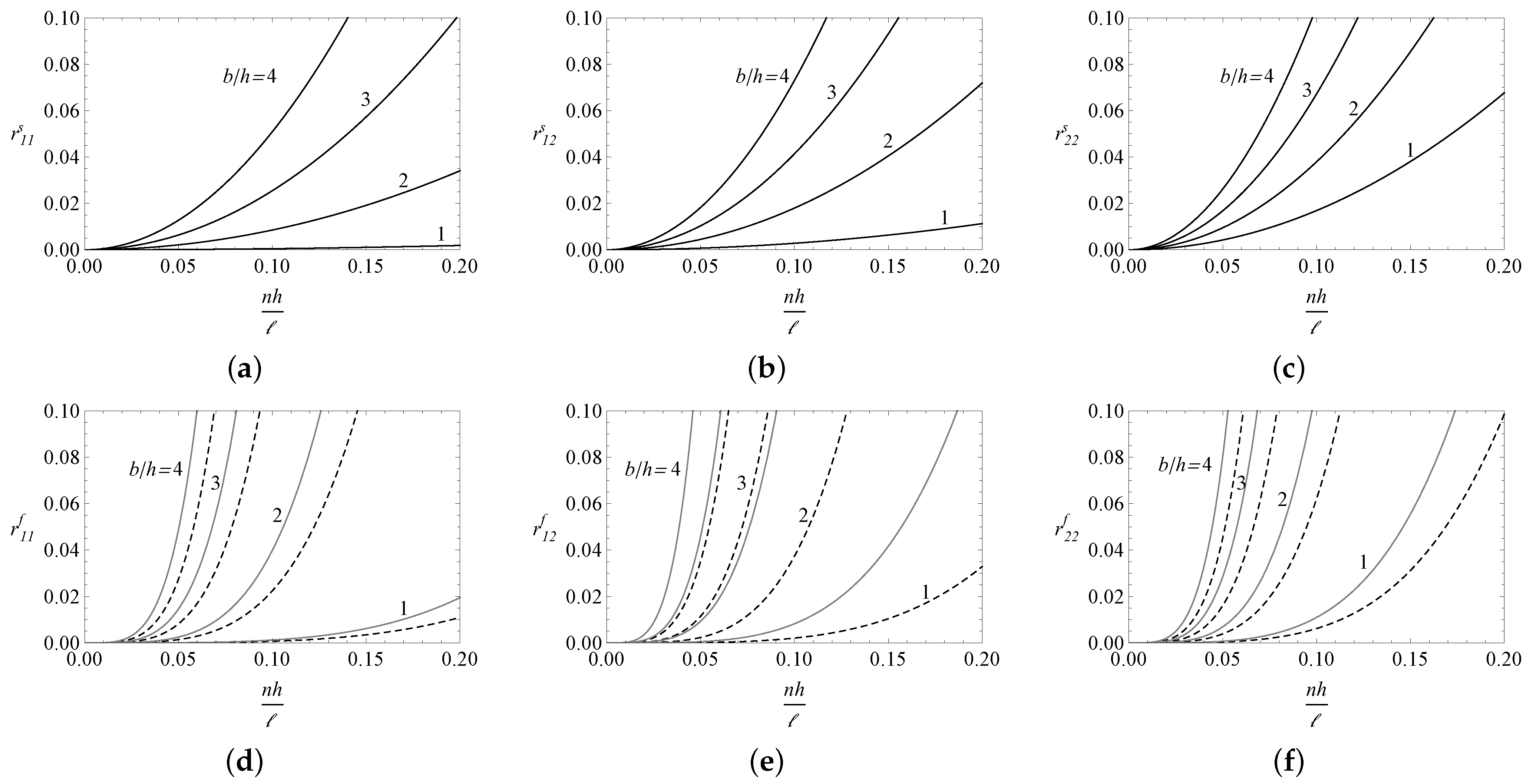
4.1.2. Extensional vs. Shear Torsional Effects
- Warping, as expected, plays a minor but not negligible role in torsion of closed TWB. In particular, it is fundamental in describing boundary layers close the constraints (or lumped forces), which, in a Fourier perspective, call for higher-order harmonics (n large), which make the fourth-order derivatives comparable with second- or zero-order derivatives.
- Due to the small but not negligible coupling terms due to warping, the torsion–distortion mechanical problem cannot, in principle, be uncoupled, as already observed, e.g., in Reference [8]. A measure of the error made in splitting the problem will be discussed with reference to the numerical results.
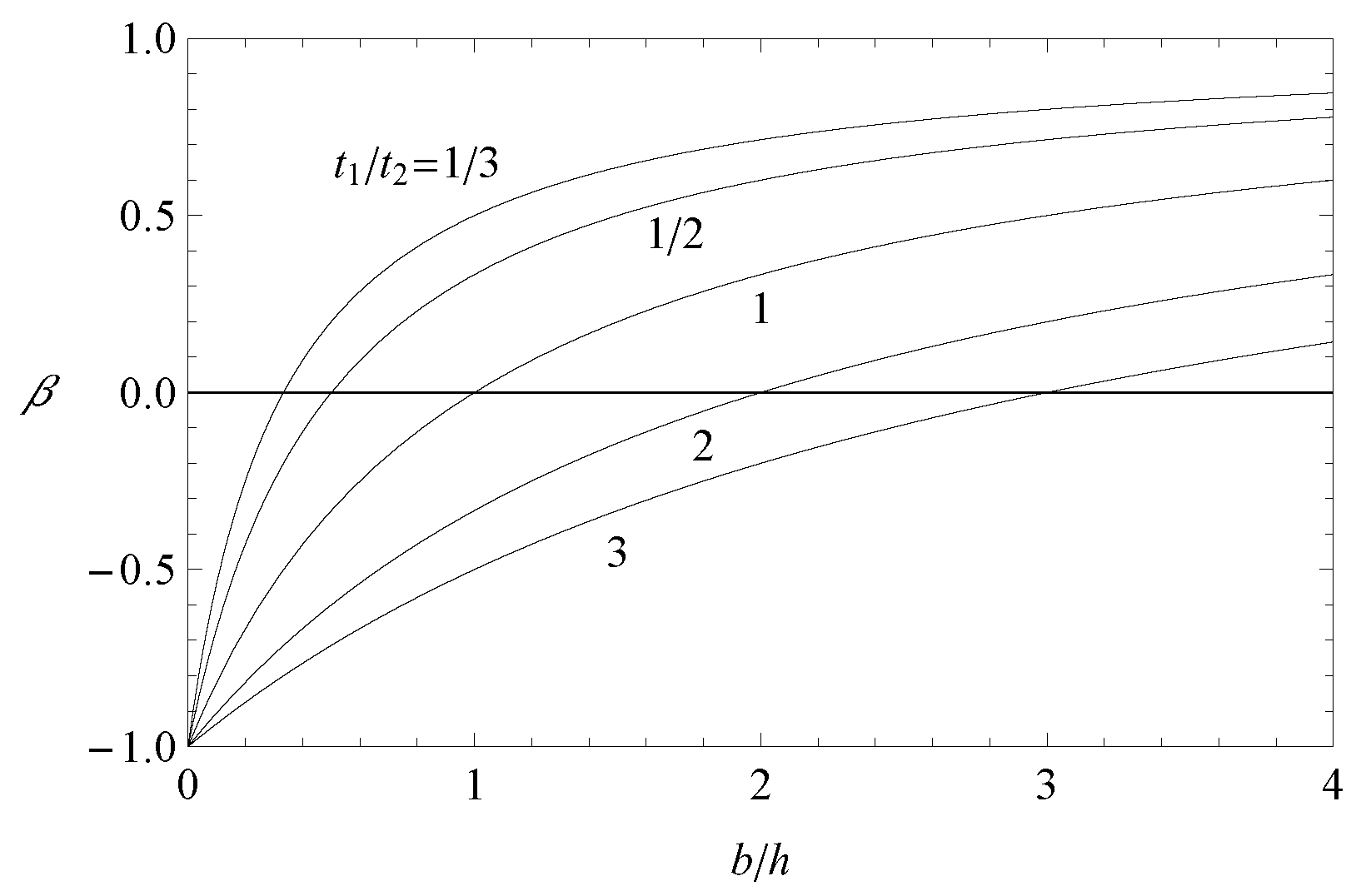
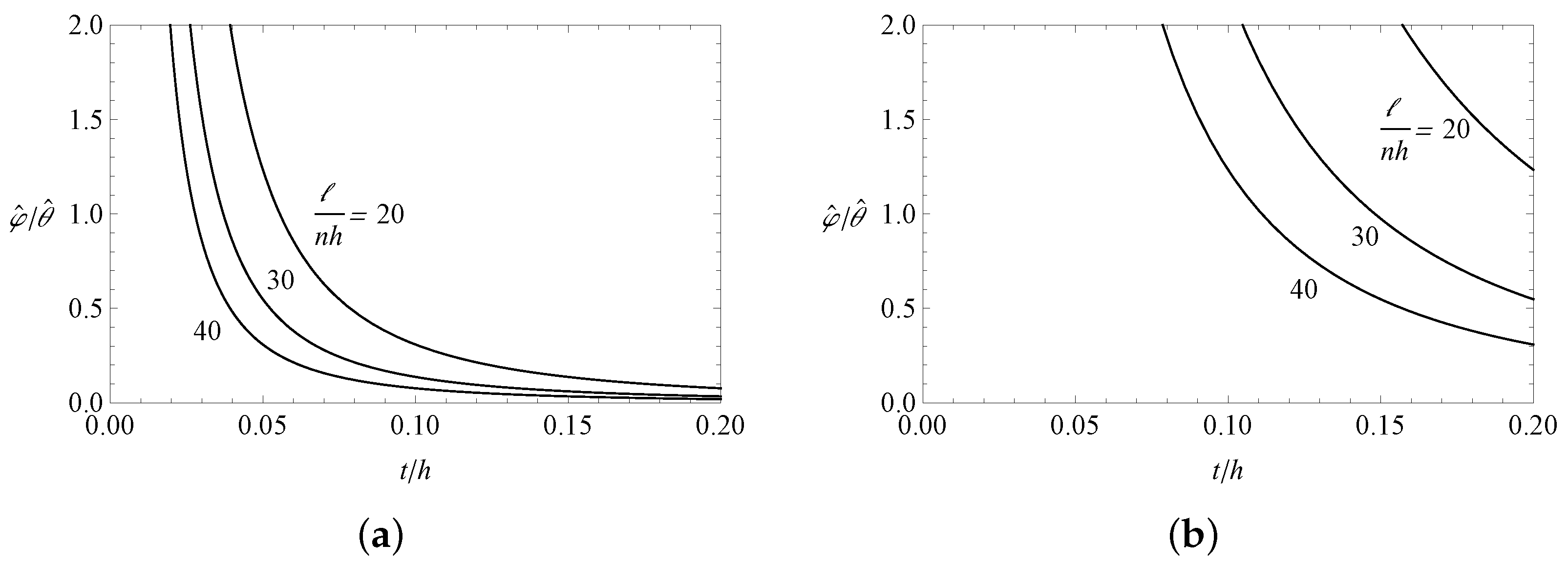
4.1.3. Distortional vs. Twist Amplitude
- for a fixed slenderness ratio , distortion is larger for smaller thicknesses;
- for a fixed thickness ratio , distortion is larger for shorter lengths.
4.2. Solution Methods
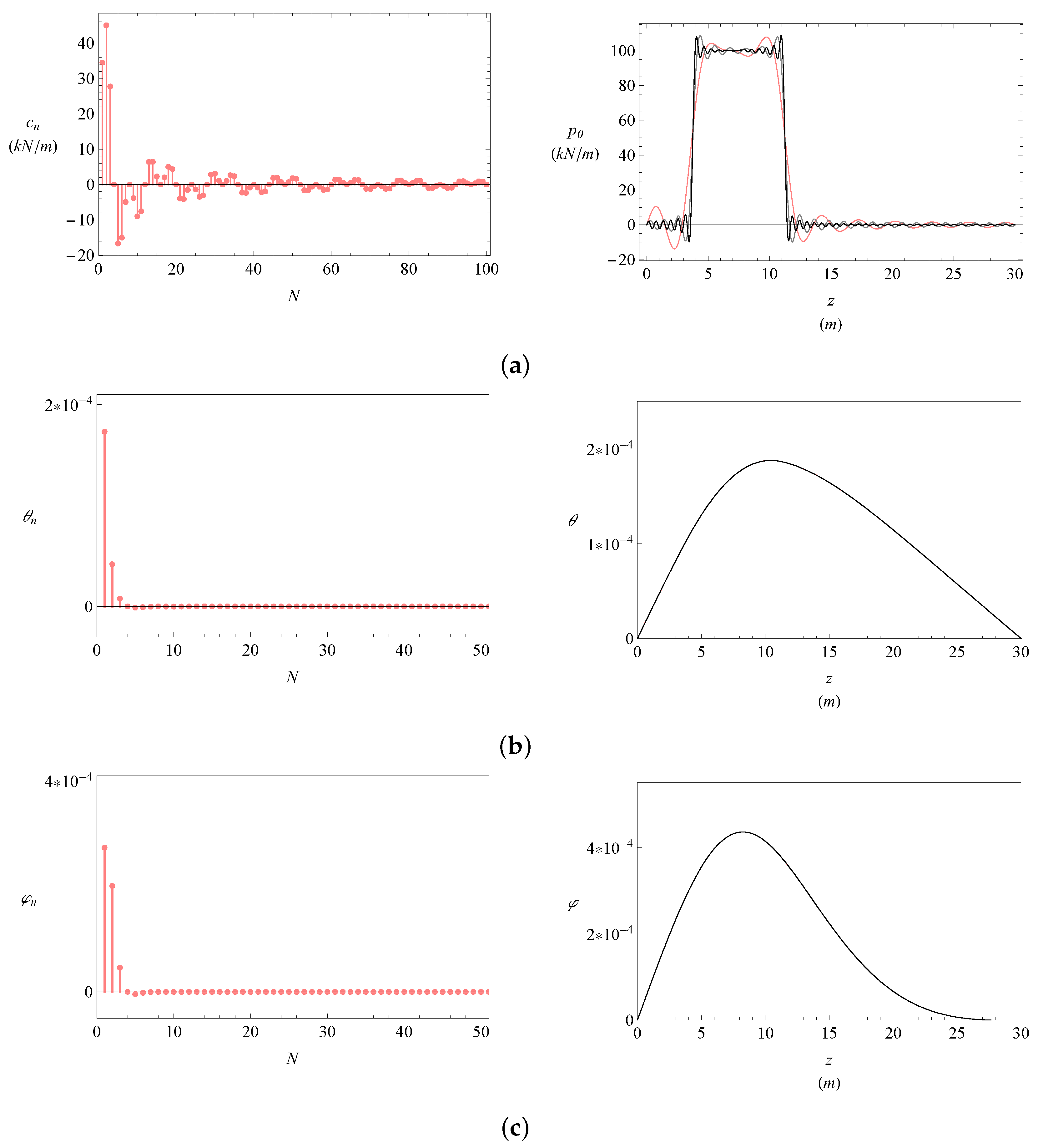
4.2.1. Fourier Analysis
4.2.2. A Simplified Approach: The Uncoupled Equations
- for the twist problem, (i) continuity of , (ii) continuity of , (iii) equilibrium of forces dual of (entailing continuity of the bimoment ), and (iv) equilibrium of forces dual of (entailing continuity of the total torsional moment );
- for the distortional problem, (i) continuity of , (ii) continuity of , (iii) equilibrium of forces dual of (entailing continuity of ), and (iv) equilibrium of forces dual of (entailing continuity of ).
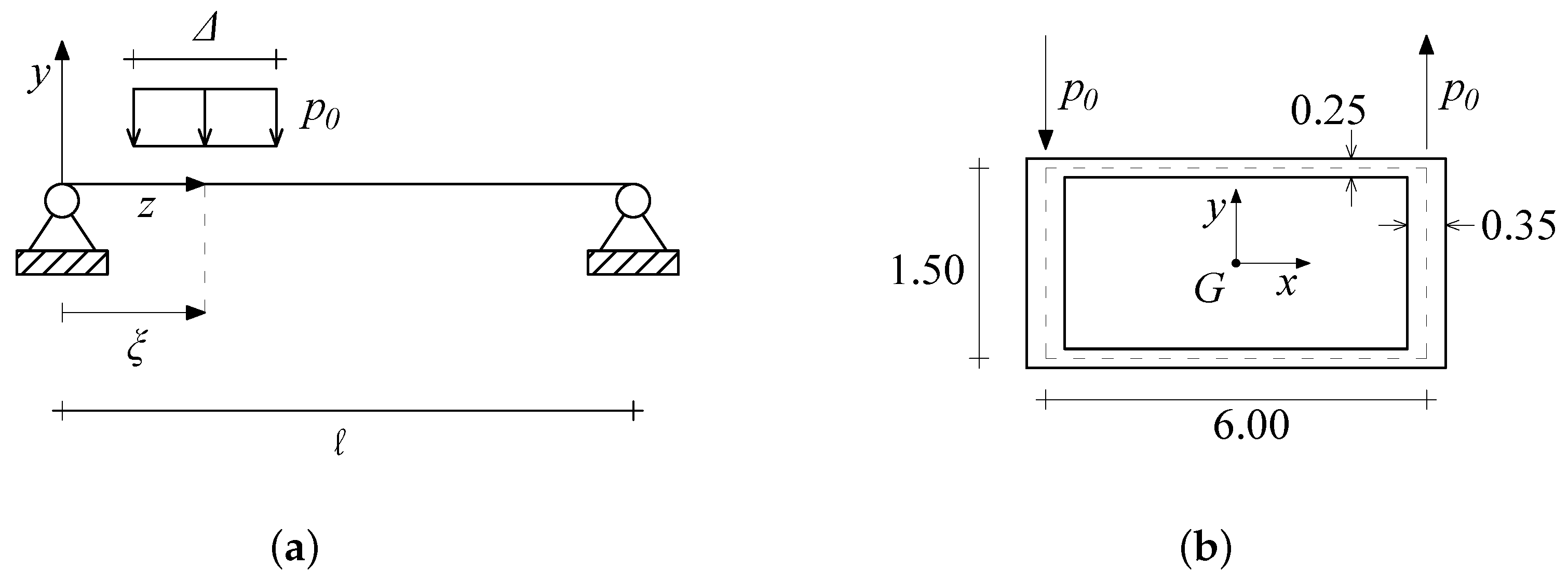
5. Numerical Results
5.1. Deflection Analysis
5.1.1. Stress Analysis in Pure Torsion
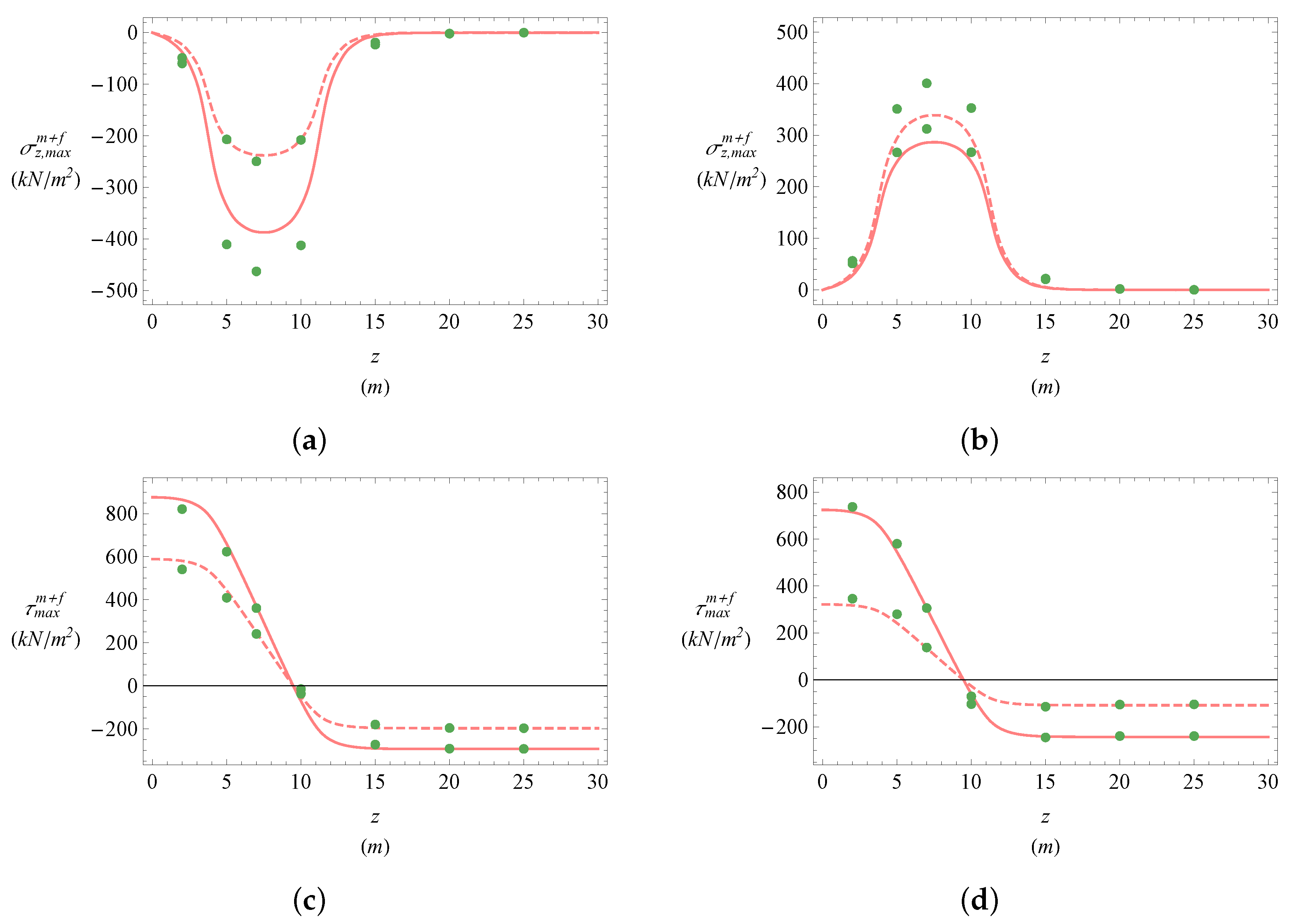
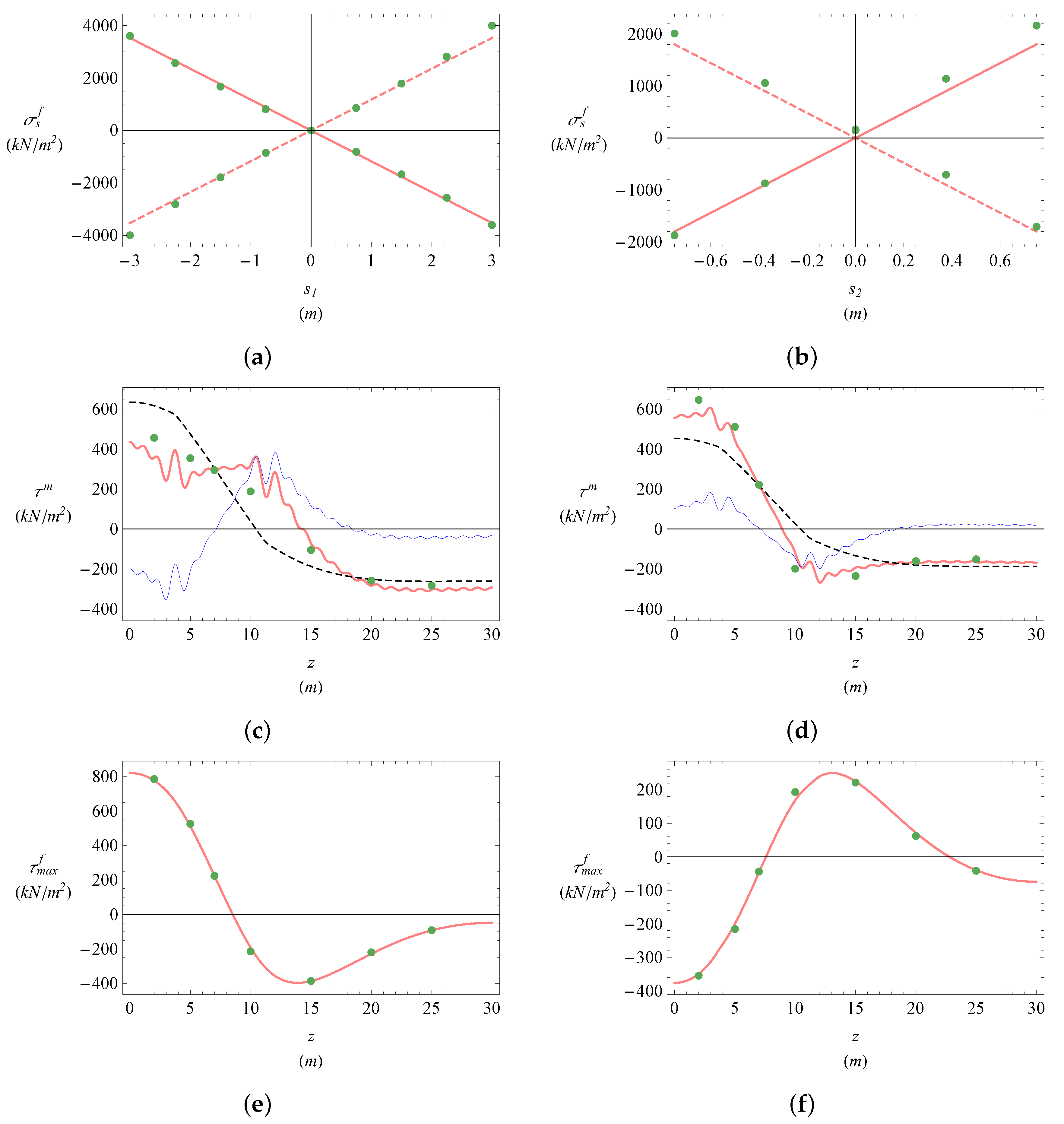
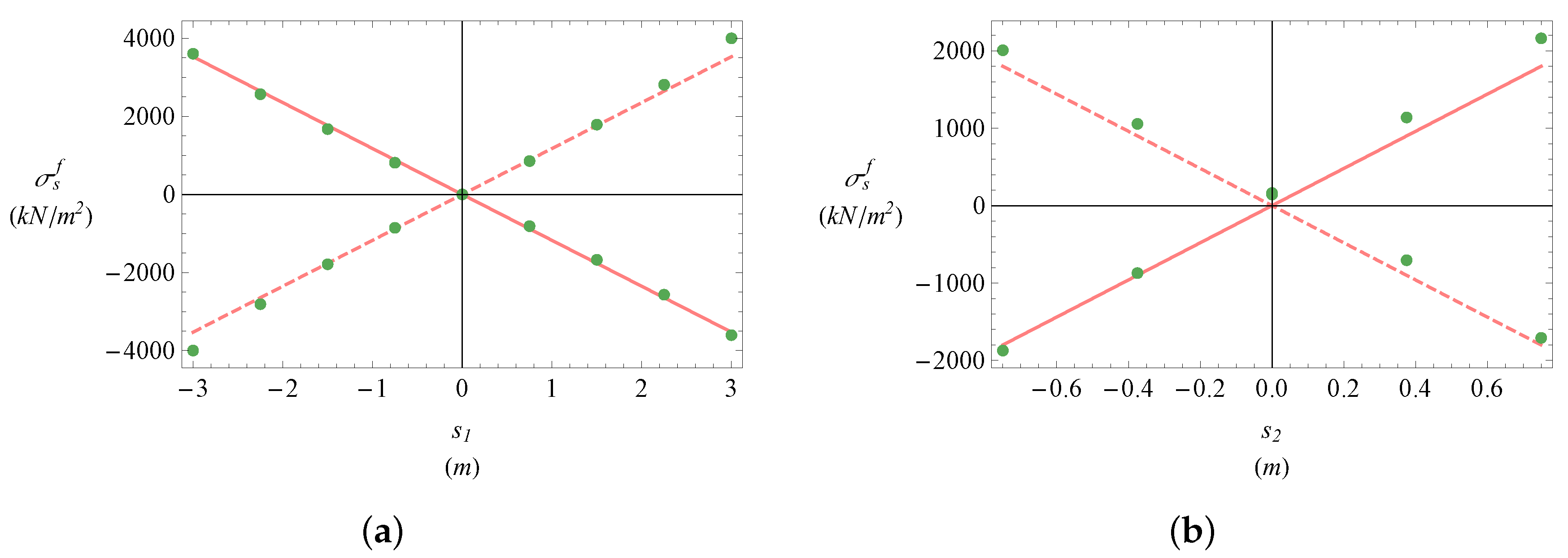
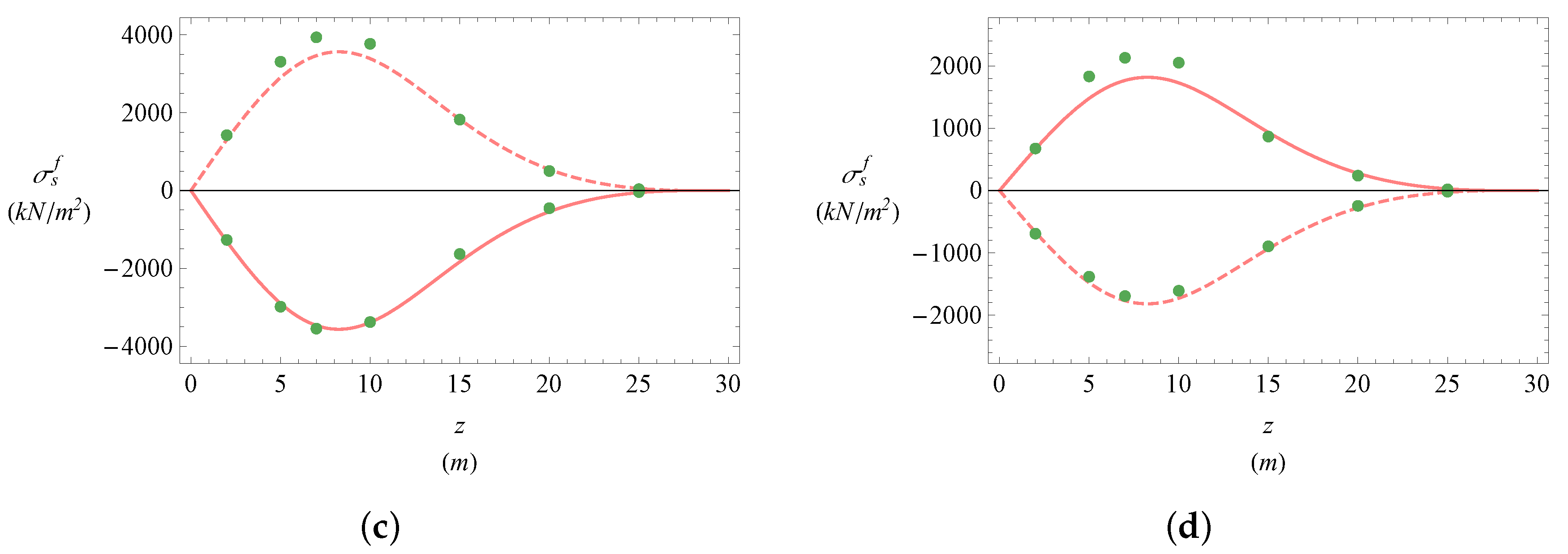
5.1.2. Stress Analysis in Torsion–Distortion
6. Conclusions
- The coefficients of the derivatives of fourth-order are mainly generated by nonuniform warping both in twist and distortion. Therefore, among them, the contribution of the flexural nature of the plates are negligible. In contrast, warping terms, although small, cannot be neglected when the displacement wavelength is short. It is argued that they could be relevant in describing boundary layers, e.g., produced by constraints preventing free warping.
- The distortion-to-twist ratio was proven to be of order 1 for thin and short girders.
- The Fourier analysis is a convenient and efficient tool to analyze simply supported girders warping free at the ends; for other boundary conditions, exact integration of the differential equations should be carried out. By following the literature, a simplified procedure was illustrated, which calls for neglecting all coupling terms, solving two independent problems and superimposing the effects. The two problems are (i) the Vlasov beam under torsion and (ii) the Winkler soil equation-like beam for distortion.
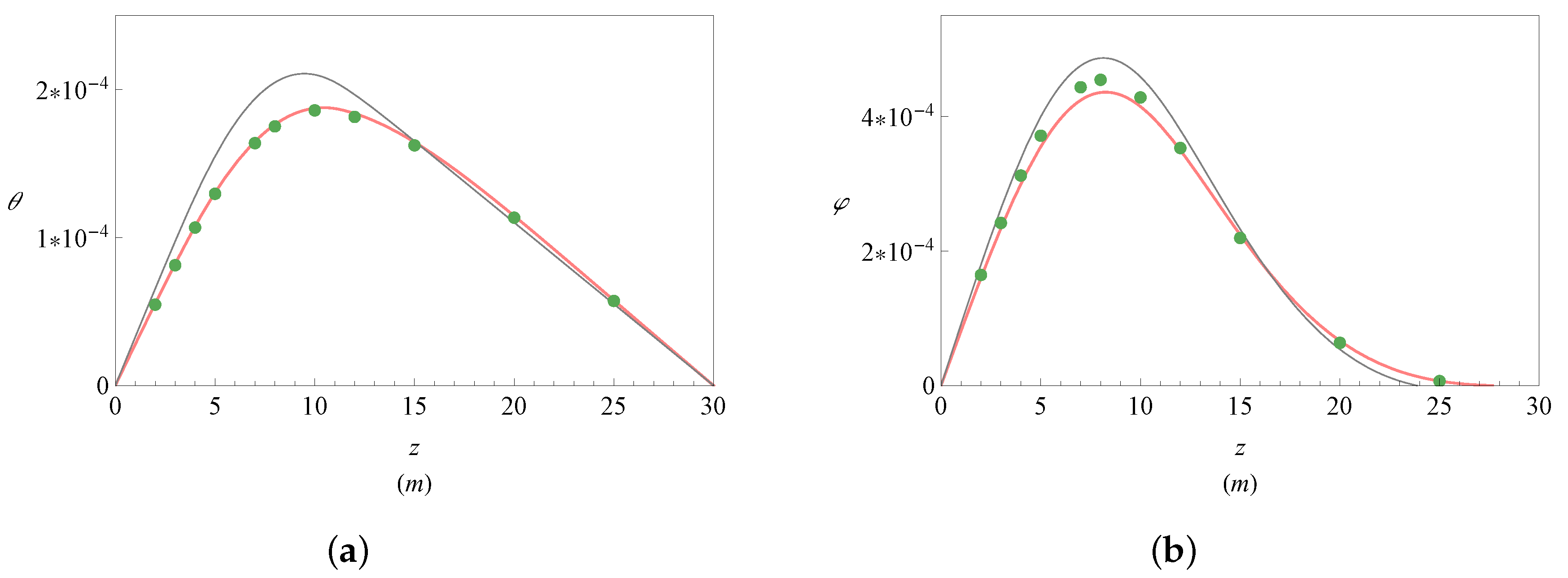
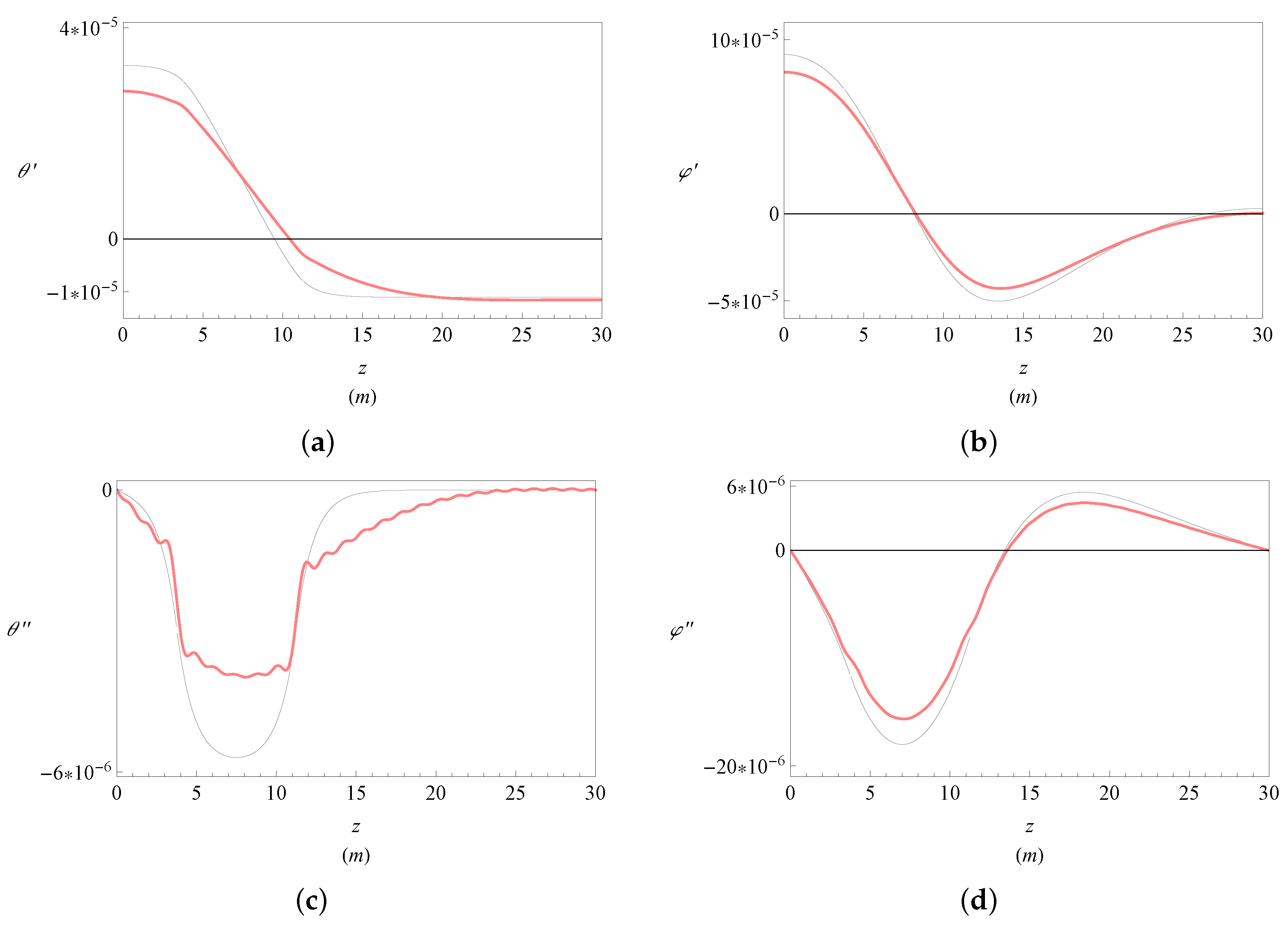
- Fourier analysis works well even for non-smooth loading conditions, provided that a sufficient number of terms is accounted for in the series. The exact integration of the uncoupled equations gives reasonably good results, with errors of about 10% with respect to the coupled Fourier representation.
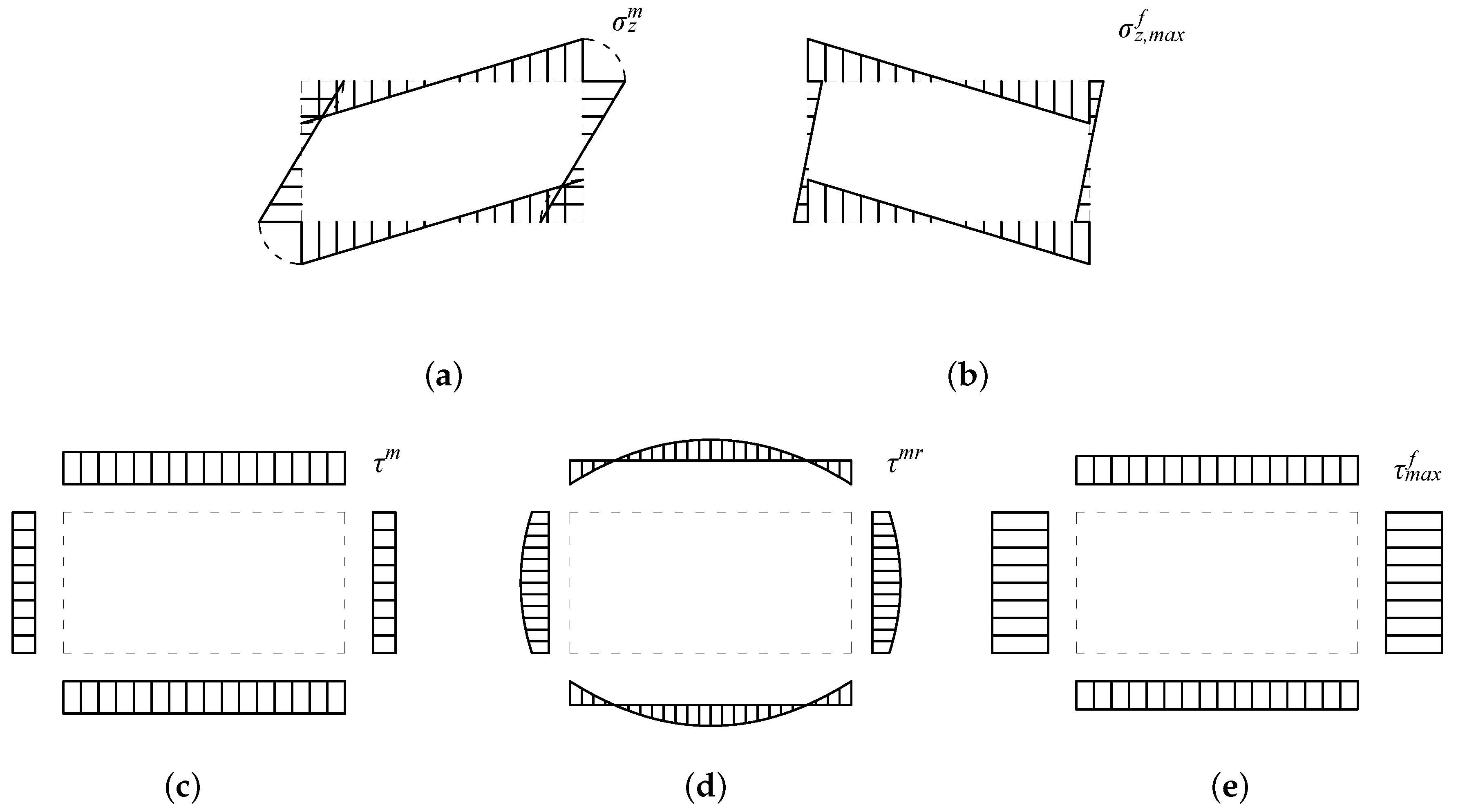
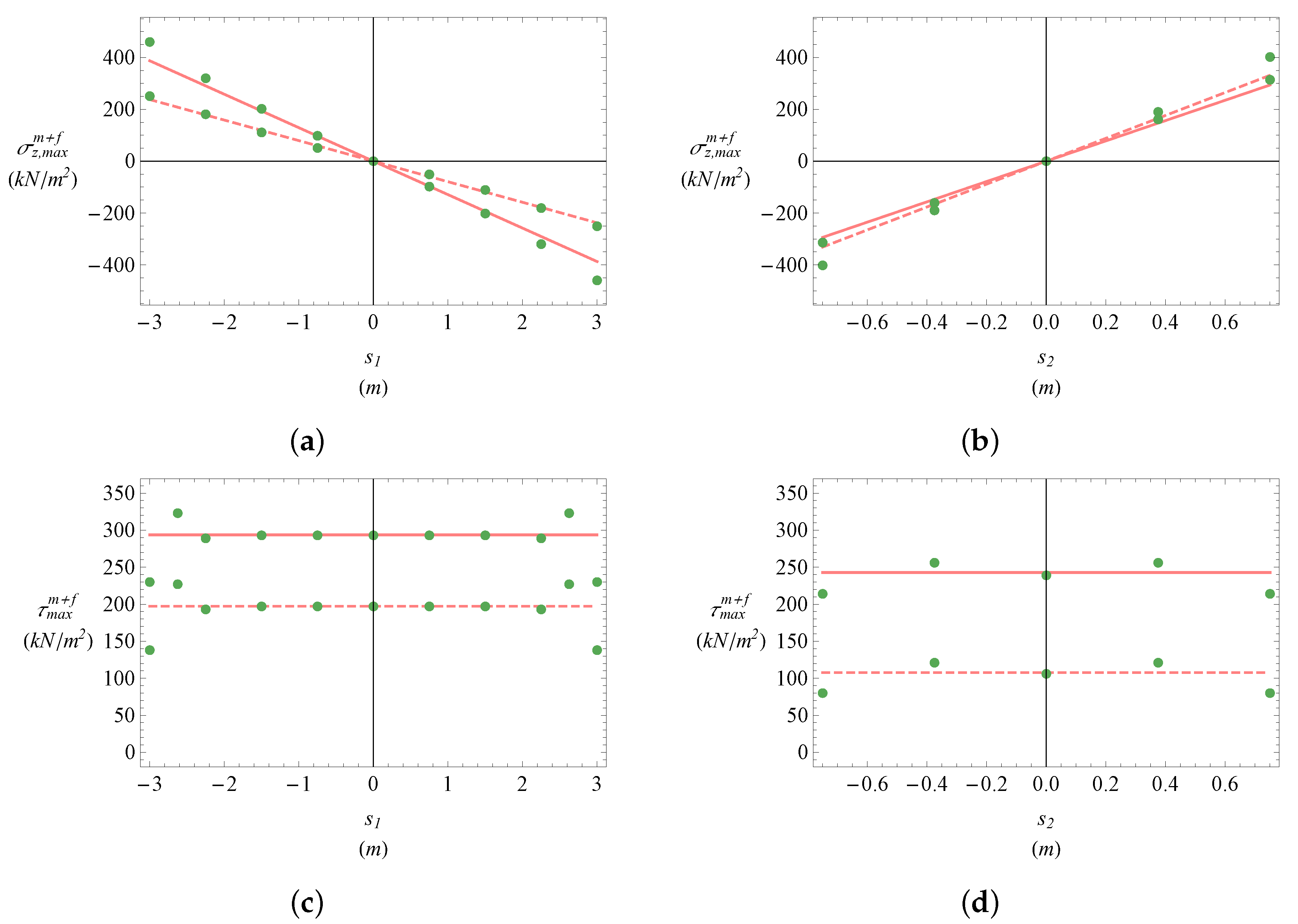
- Stresses due to torsion mainly consist of (i) normal longitudinal components equilibrating the bimoment; (ii) active tangential stresses, as given by the Bredt theory; and (iii) reactive tangential stresses equilibrating the complementary torsional moment due to warping. All these effects are significant, except for the reactive tangential stresses, of which the influence is appreciable only close to the discontinuity points of the load.
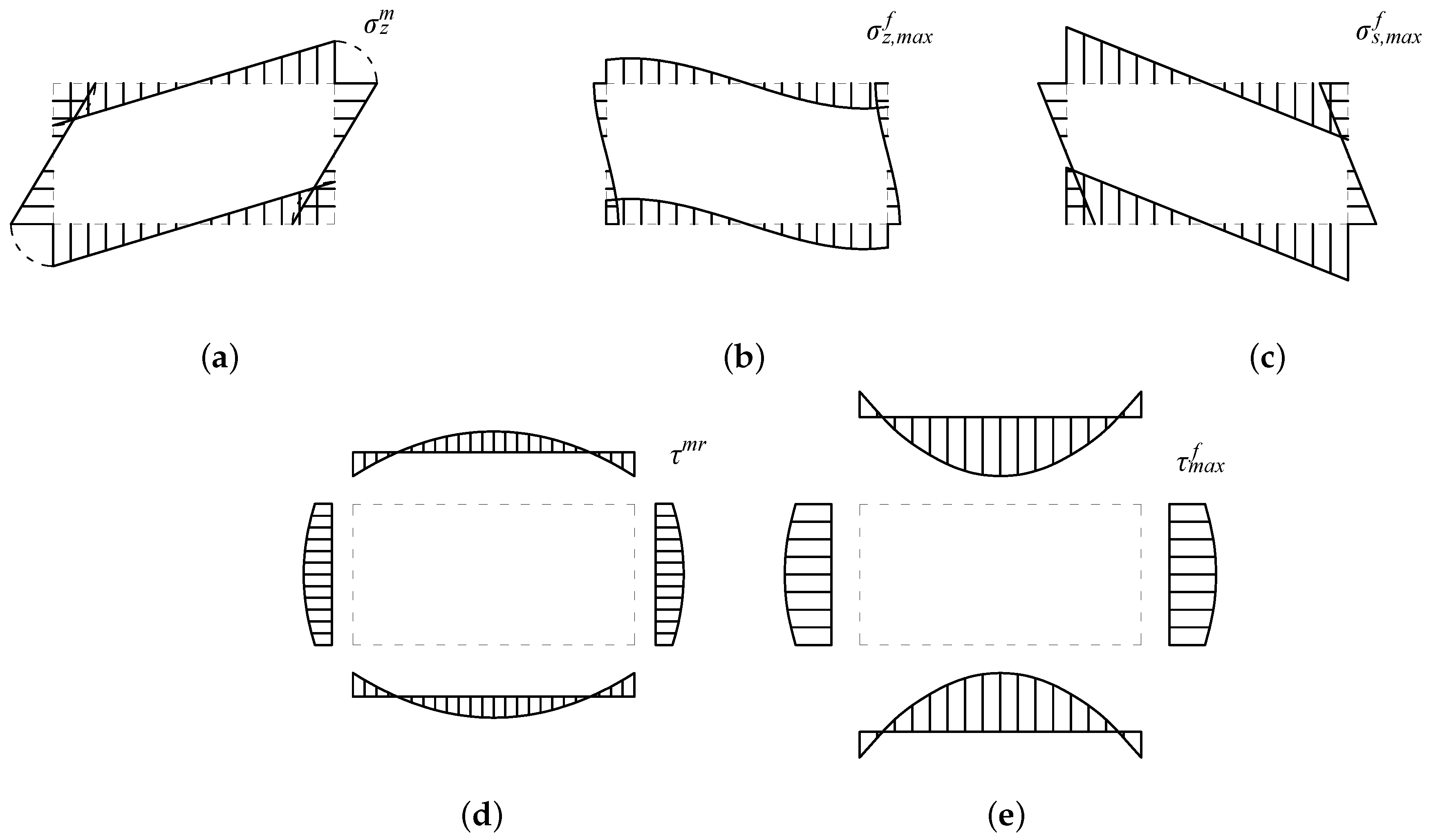
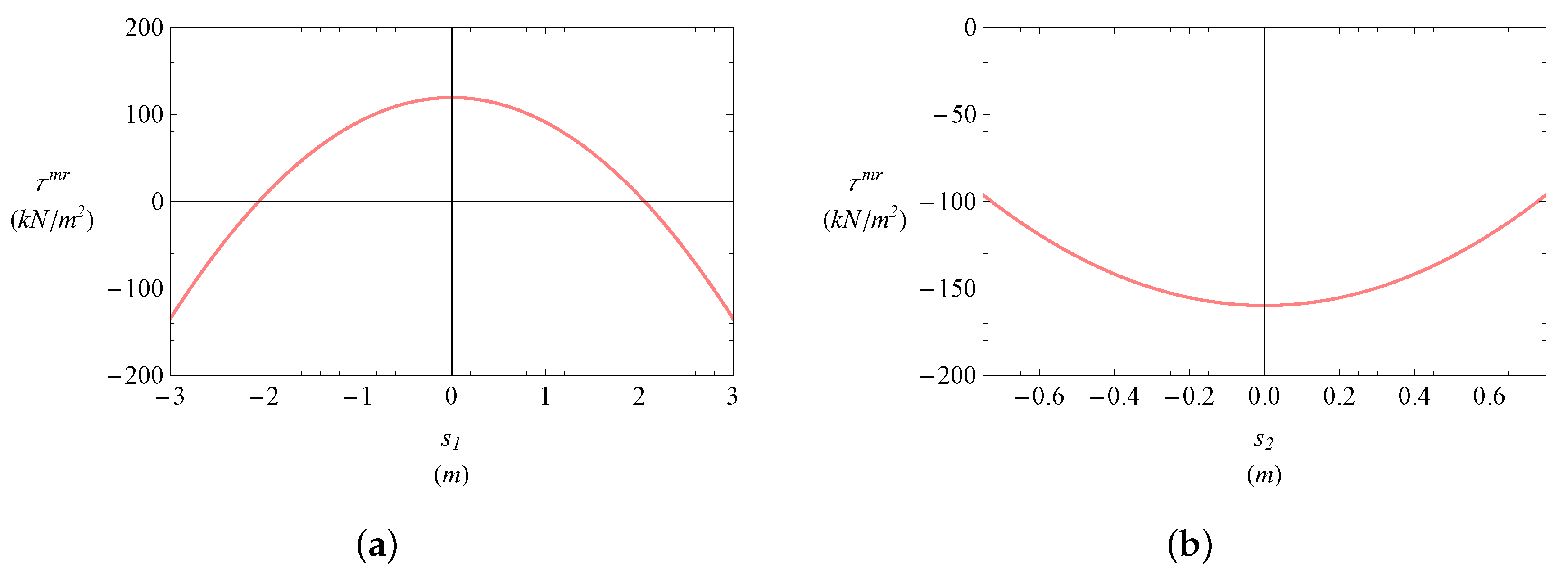
- Stresses due to distortion consist of (i) membrane normal stress in the longitudinal direction, triggered by nonuniform warping, kinematically compatible with the loss of the shape of the cross section; (ii) membrane normal stresses in the transverse direction, generated by the frame-like behavior of the cross-section; (iii) flexural normal stresses in the longitudinal direction, generated by the flexure of the plates associated with the longitudinal modulation of the frame-deflection; and (iv) tangential stresses, generated by the torsion of the plates, made of an active and a reactive component. Among these stresses, (i) and (ii) are the most important. However, among the tangential stresses, the reactive component cannot be neglected.
Author Contributions
Funding
Conflicts of Interest
Appendix A. The Vlasov Stresses in Rectangular Box-Girders under Nonuniform Torsion
Appendix B. Planar Frame Deflections
- when , , , entailing ;
- when , and , entailing .
- when , , from which
- when , , from which
Appendix C. Matrices in the GBT Equation (22)
- Matrix :where is the warping ratio (Equation (20)) and is the warping stiffness. As already observed, when , while .
- Matrixwhere (Equation (16)) is the joints’ distortional rotation.
- Matrix :where is the Bredt torsional stiffness.
- Matrix :
- Matrix :
Appendix D. Reactive Distortional Tangential Stresses
References
- Vlasov, V.Z. Thin-Walled Elastic Beams; Monson: Jerusalem, Israel, 1961. [Google Scholar]
- Wright, R.H.; Abdel-Samuel, S.R.; Robinson, A.R. BEF Analogy for Analysis of Box-Girders. J. Struct. Div. ASCE 1968, 94, 1179–1743. [Google Scholar]
- Petrangeli, M.P.; Zechini, A. Il calcolo dei ponti a cassone unicellulare con pareti sottili. Giornale del Genio Civile 1973, 2, 108–122. [Google Scholar]
- Stefanou, G.D.; Dritsos, S.; Bakas, G.J. The effects of additional deformations in box-beam bridges on the longitudinal stresses and transverse moments. Comput. Struct. 1983, 16, 613–628. [Google Scholar] [CrossRef]
- Arici, M.; Granata, M.; Recupero, A. BEF Analogy for Concrete Box Girder Analysis of Bridges. In Proceedings of the 34th International Symposium on Bridge and Structural Engineering, Venice, Italy, 22–24 September 2010. [Google Scholar]
- Stavridis, L.T.; Spiliopoulos, K.V.; Afantenou, A.V.; Kapogiannis, I.A. Appraisal of simplified methods for the analysis of box-girder bridges. Int. J. Bridge Eng. 2015, 3, 55–64. [Google Scholar]
- Ren, Y.; Cheng, W.; Wang, Y.; Chen, Q.; Wang, B. Distortional analysis of simply supported box girders with inner diaphragms considering shear deformation of diaphragms using initial parameter method. Eng. Struct. 2017, 145, 44–59. [Google Scholar] [CrossRef]
- Mentrasti, L. Distortion (and Torsion) of Rectangular Thin-Walled Beams. Thin Wall Struct. 1990, 10, 175–193. [Google Scholar] [CrossRef]
- Mentrasti, L. Torsion of Box Girders with Deformable Cross Sections. J. Eng. Mech. 1991, 117, 2179–2200. [Google Scholar] [CrossRef]
- Sapountzakis, E.; Argyridi, A. Influence of in-plane deformation in higher order beam theories. J. Mech. Eng. 2018, 68, 77–94. [Google Scholar] [CrossRef] [Green Version]
- Zulli, D. A one-dimensional beam-like model for double-layered pipes. Int. J. Nonlinear Mech. 2019, 109, 50–62. [Google Scholar] [CrossRef]
- Zulli, D.; Casalotti, A.; Luongo, A. Static Response of Double-Layered Pipes via a Perturbation Approach. Appl. Sci. 2021, 11, 886. [Google Scholar] [CrossRef]
- Luongo, A.; Zulli, D. A non-linear one-dimensional model of cross-deformable tubular beam. Int. J. Nonlinear Mech. 2014, 66, 33–42. [Google Scholar] [CrossRef]
- Gabriele, S.; Rizzi, N.; Varano, V. A 1D nonlinear TWB model accounting for in plane cross-section deformation. Int. J. Solids Struct. 2016, 94–95, 170–178. [Google Scholar] [CrossRef]
- Ziane, N.; Ruta, G.; Meftah, S.A.; Doula, M.H.; Benmohammed, N. Instances of mixed buckling and post-buckling of steel RHS beams. Int. J. Mech. Sci. 2021, 190, 106013. [Google Scholar] [CrossRef]
- Cheung, Y.K. Finite Strip Method in Structural Analysis; Pergamon Press: Oxford, UK, 1976. [Google Scholar]
- Friedrich, R. Finite strip method: 30 Years—A bibliography (1968–1998). Eng. Comput. 2000, 17, 92–111. [Google Scholar] [CrossRef]
- Adany, S.; Schafer, B.W. A full modal decomposition of thin-walled, single-branched open cross-section members via the constrained finite strip method. J. Constr. Steel Res. 2008, 64, 12–29. [Google Scholar] [CrossRef]
- Schardt, R. Verallgemeinerte Technicsche Biegetheorie; Springer: Berlin/Heidelberg, Germany, 1989. [Google Scholar]
- Chidolue, C.A.; Osadebe, N.N. Flexural Torsional Behaviour of Thin Walled Mono Symmetric Box Girder Structures. Int. J. Eng. Sci. Emerg. Technol. 2012, 2, 11–19. [Google Scholar]
- Davies, J.M.; Leach, P.; Heinz, D. Second-Order Generalised Beam Theory. J. Constr. Steel Res. 1994, 31, 221–241. [Google Scholar] [CrossRef]
- Leach, P. The Calculation of Modal Cross-Section Properties for use in the Generaliszd Beam Theory. Thin Wall Struct. 1994, 19, 61–79. [Google Scholar] [CrossRef]
- Silvestre, N.; Camotim, D. First-order generalised beam theory for arbitrary orthotropic materials. Thin Wall Struct. 2002, 40, 755–789. [Google Scholar] [CrossRef]
- Gonçalves, R.; Ritto-Correa, M.; Camotim, D. A new approach to the calculation of cross-section deformation modes in the framework of generalized beam theory. Comput. Mech. 2010, 46, 759–781. [Google Scholar] [CrossRef]
- Bebiano, R.; Gonçalves, R.; Camotim, D. A cross-section analysis procedure to razionalise and automate the performance of GBT-based structural analyses. Thin Wall Struct. 2015, 92, 29–47. [Google Scholar] [CrossRef]
- Ferrarotti, A.; Piccardo, G.; Luongo, A. A novel straightforward dynamic approach for the evaluation of extensional modes within GBT ’cross-section analysys’. Thin Wall Struct. 2017, 114, 52–69. [Google Scholar] [CrossRef]
- Ranzi, G.; Luongo, A. A new approach for thin-walled member analysis in the framework of GBT. Thin Wall Struct. 2011, 49, 1404–1414. [Google Scholar] [CrossRef] [Green Version]
- Piccardo, G.; Ranzi, G.; Luongo, A. A complete dynamic approach to the Generalized Beam Theory cross-section analysis including extension and shear modes. Math. Mech. Solids 2014, 19, 900–924. [Google Scholar] [CrossRef]
- Piccardo, G.; Ranzi, G.; Luongo, A. A direct approach for the evaluation of the conventional modes within the GBT formulation. Thin Wall Struct. 2014, 74, 133–145. [Google Scholar] [CrossRef]
- Taig, G.; Ranzi, G.; D’Annibale, F. An unconstrained dynamic approach for the Generalised Beam Theory. Continuum Mech. Therm. 2015, 27, 879–904. [Google Scholar] [CrossRef]
- de Miranda, S.; Gutierrez, A.; Miletta, R.; Ubertini, F. A generalized beam theory with shear deformation. Thin Wall Struct. 2014, 67, 88–100. [Google Scholar] [CrossRef]
- de Miranda, S.; Madeo, A.; Miletta, R.; Ubertini, F. On the relationship of the shear deformable Generalized Beam Theory with classical and non-classical theories. Int. J. Solids Struct. 2014, 51, 3698–3709. [Google Scholar] [CrossRef] [Green Version]
- Bianco, M.J.; Habtemariam, A.K.; Knke, C.; Zabel, V. Analysis of warping and distortion transmission in mixed shell–GBT (generalized beam theory) models. Int. J. Adv. Struct. Eng. 2019, 11, 109–126. [Google Scholar] [CrossRef] [Green Version]
- Manta, D.; Gonçalves, R.; Camotim, D. Combining shell and GBT-based finite elements: Linear and bifurcation analysis. Thin Wall Struct. 2020, 152, 106665. [Google Scholar] [CrossRef]
- Dikaros, I.C.; Sapountzakis, E.J. Distortional Analysis of Beams of Arbitrary Cross Section Using BEM. J. Eng. Mech. 2017, 143, 04017118. [Google Scholar] [CrossRef]
- Silvker, V. Closed-profile thin-walled bars—A theory by Umanski. In Mechanics of Structural Elements-Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2007; pp. 395–432. [Google Scholar]
- Schardt, R. Generalized Beam Theoy—An Adequate Method for Coupled Stability Problems. Thin Wall Struct. 1994, 19, 161–180. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (i,j) | (1,1) | (1,2) | (2,2) |
|---|---|---|---|
| 0 | 0 | ||
| 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pancella, F.; Luongo, A. A Minimal GBT Model for Distortional-Twist Elastic Analysis of Box-Girder Bridges. Appl. Sci. 2021, 11, 2501. https://doi.org/10.3390/app11062501
Pancella F, Luongo A. A Minimal GBT Model for Distortional-Twist Elastic Analysis of Box-Girder Bridges. Applied Sciences. 2021; 11(6):2501. https://doi.org/10.3390/app11062501
Chicago/Turabian StylePancella, Francesca, and Angelo Luongo. 2021. "A Minimal GBT Model for Distortional-Twist Elastic Analysis of Box-Girder Bridges" Applied Sciences 11, no. 6: 2501. https://doi.org/10.3390/app11062501
APA StylePancella, F., & Luongo, A. (2021). A Minimal GBT Model for Distortional-Twist Elastic Analysis of Box-Girder Bridges. Applied Sciences, 11(6), 2501. https://doi.org/10.3390/app11062501