
Measurements and Analysis of AC Losses in HTS Windings of Electrical Machine for Different Operation Modes

Abstract
:1. Introduction
2. Methods
- -
- Amplifying and filtering the signals to avoid creating an additional phase shift between the current and the voltage;
- -
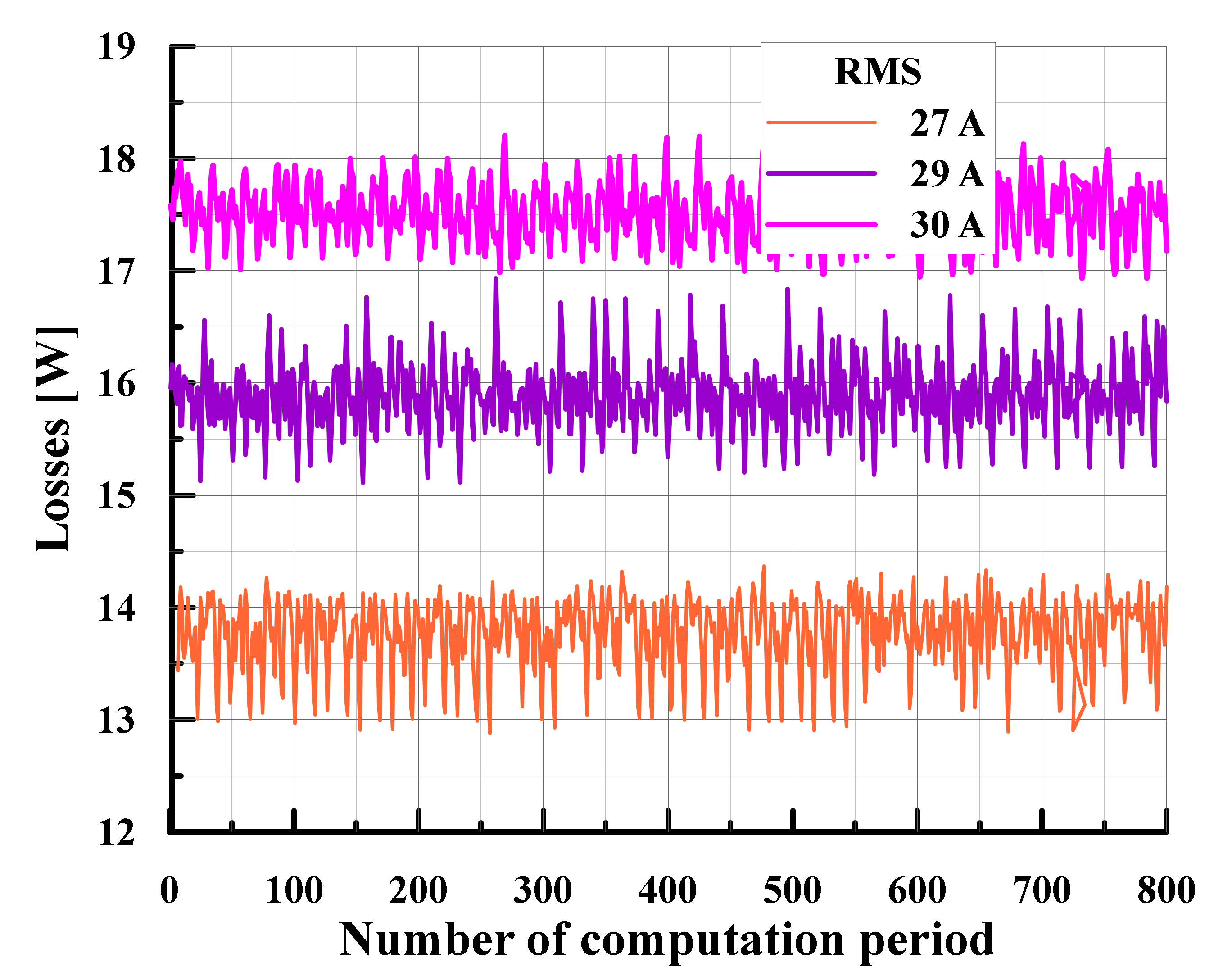
- Calculation of the losses many times, then the calculation of the statistical mean of the losses to increase the signal/noise ratio.
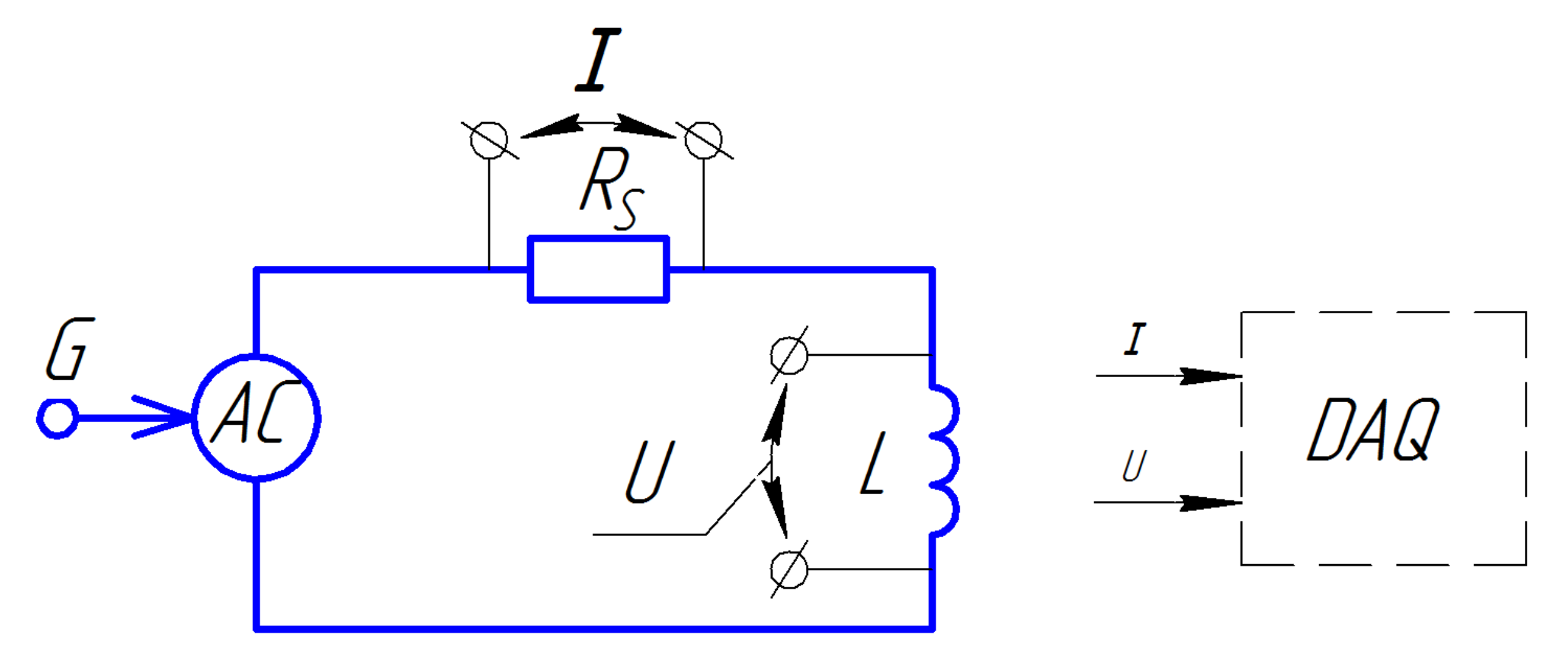
2.1. Test Bench for Study of Solitary Coils on Sinusoidal Current
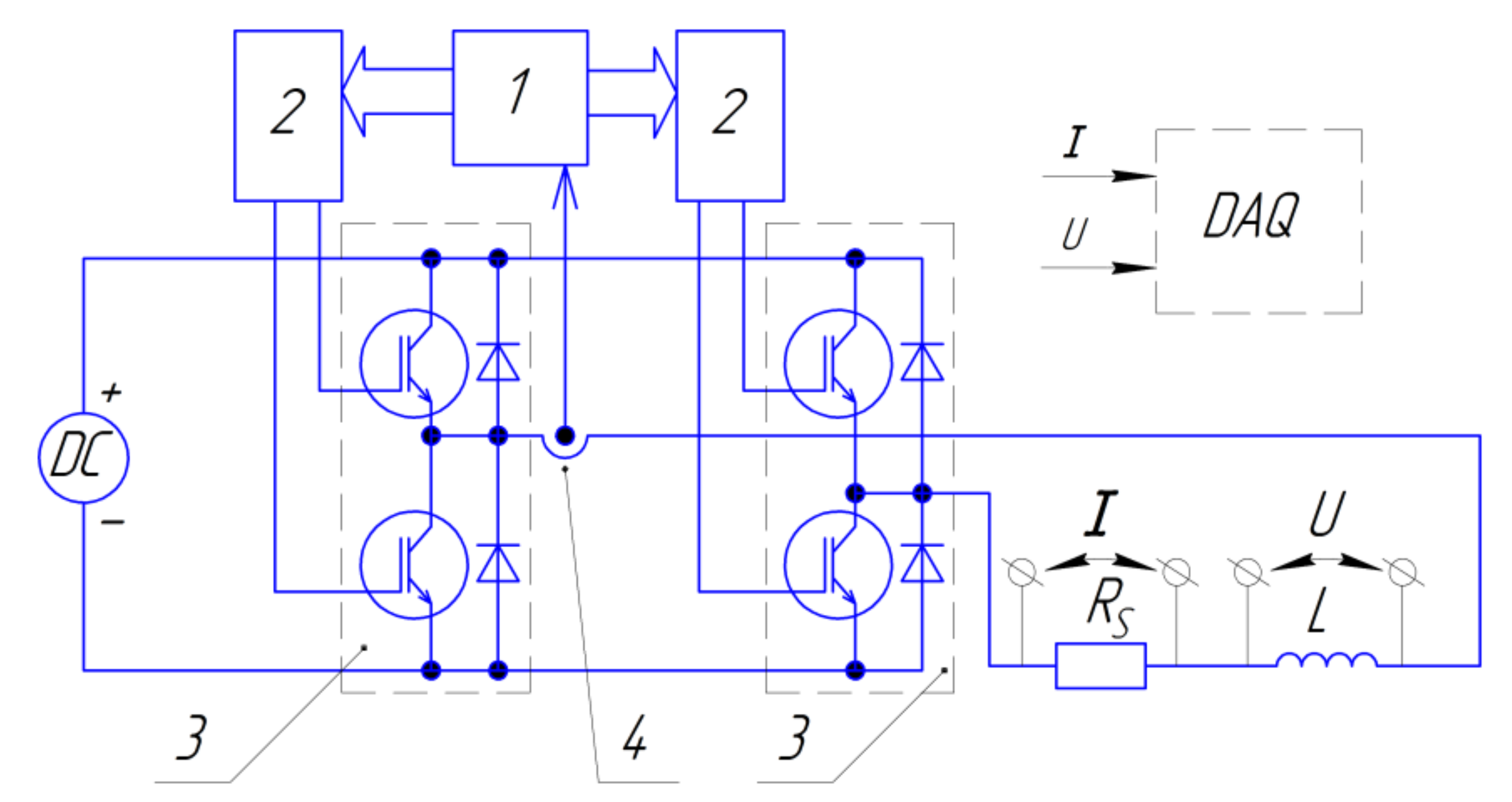
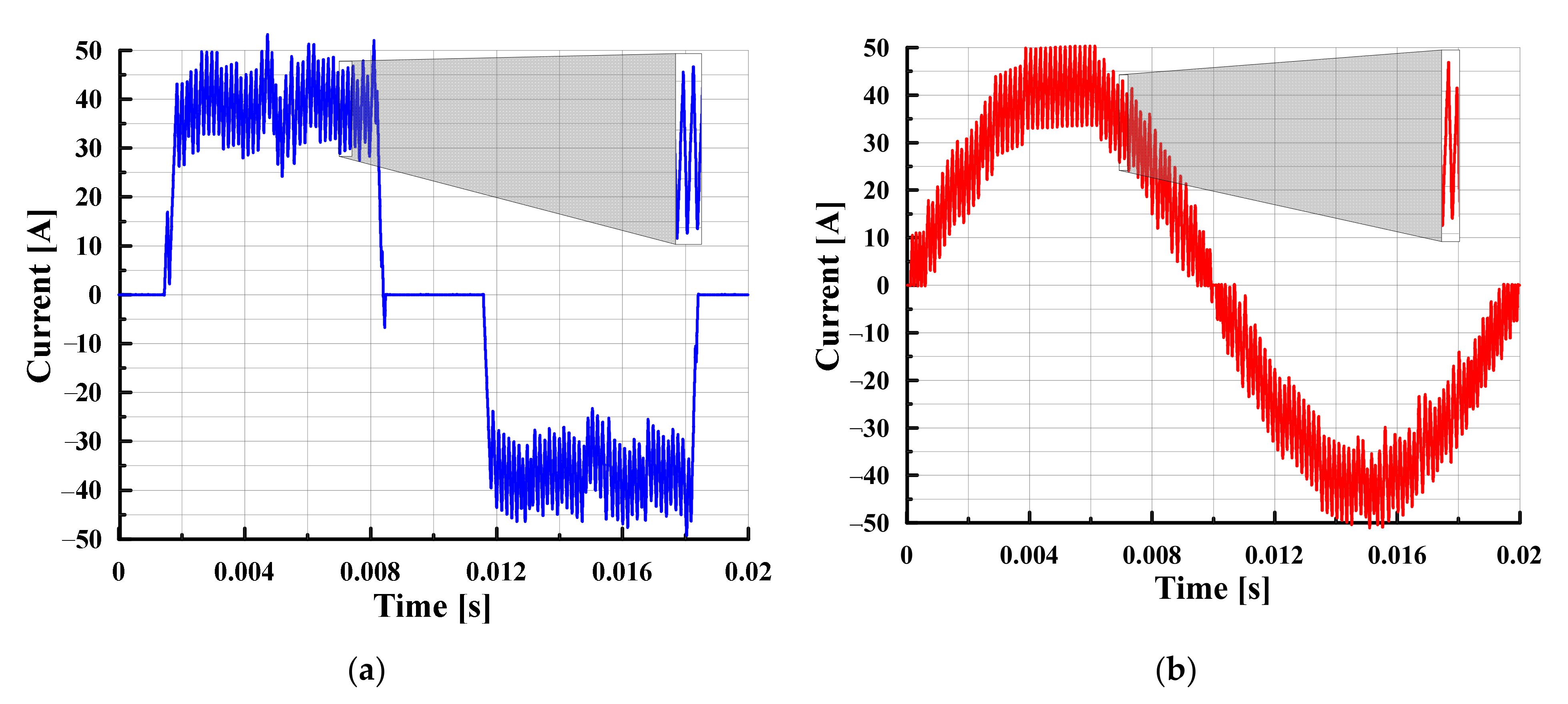
2.2. Test Bench for Loss Studies on High-Frequency Modulated Currents
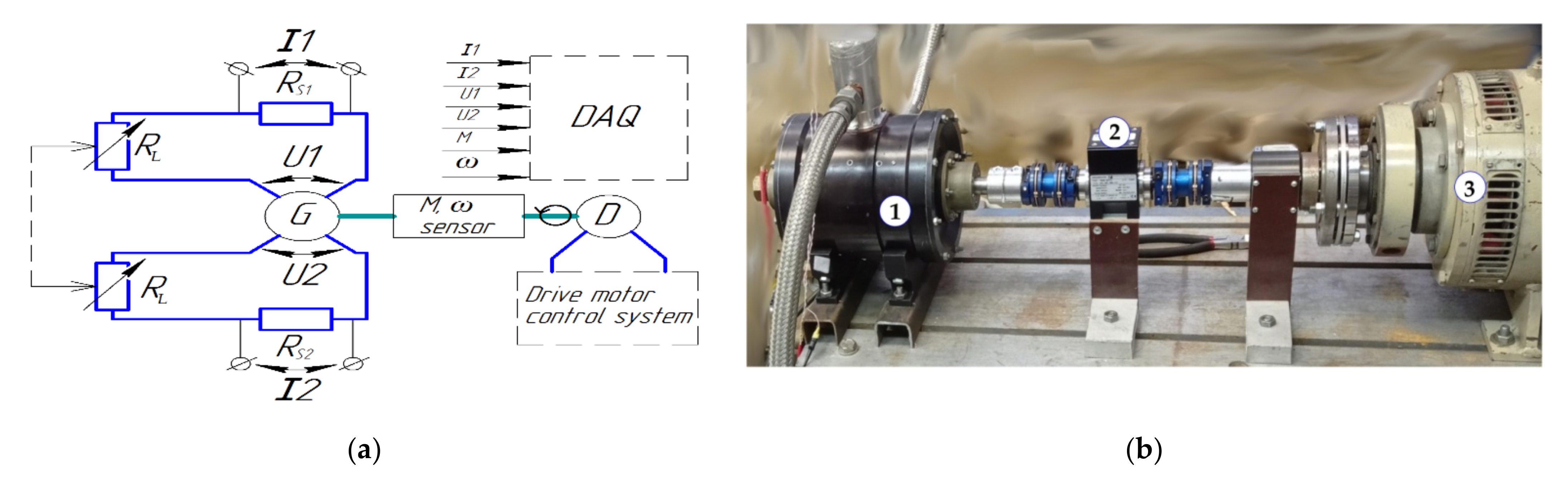
2.3. Test Bench for Loss Studies in HTS Winding
3. Research Objects
3.1. HTS Racetrack Coil
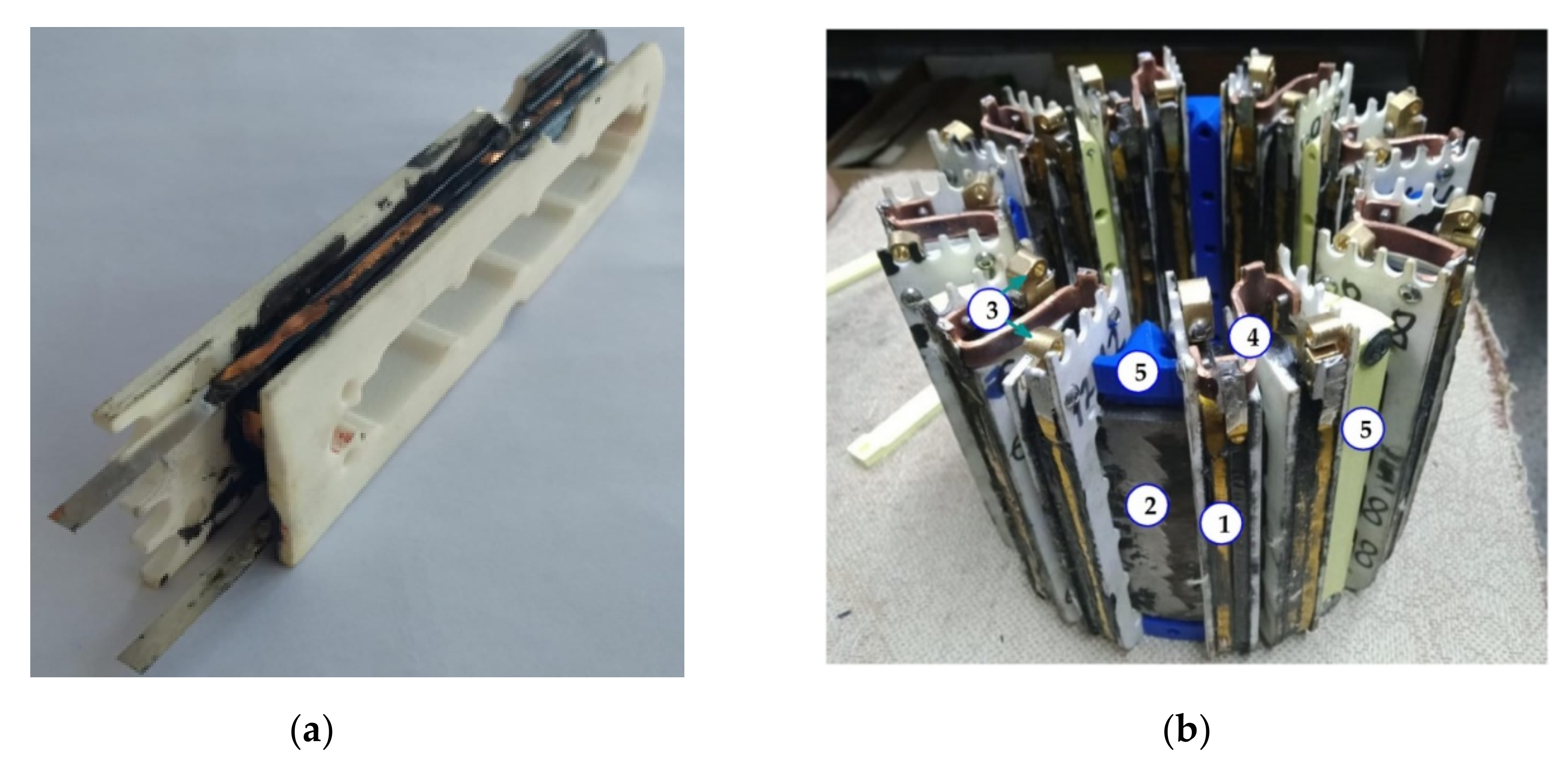
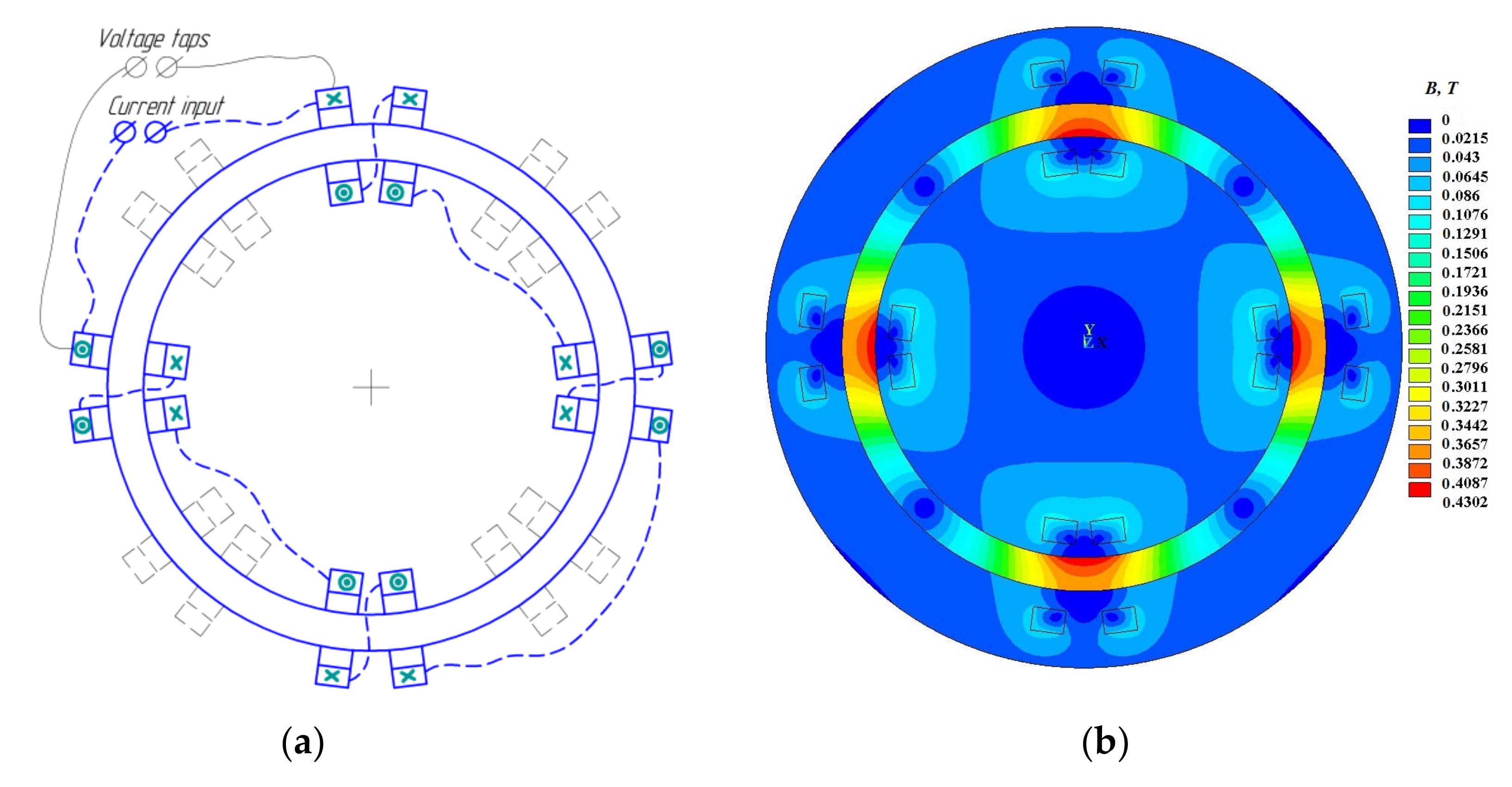
3.2. HTS Winding (A Part of the Winding of an Experimental Electric Machine)
4. Test Results
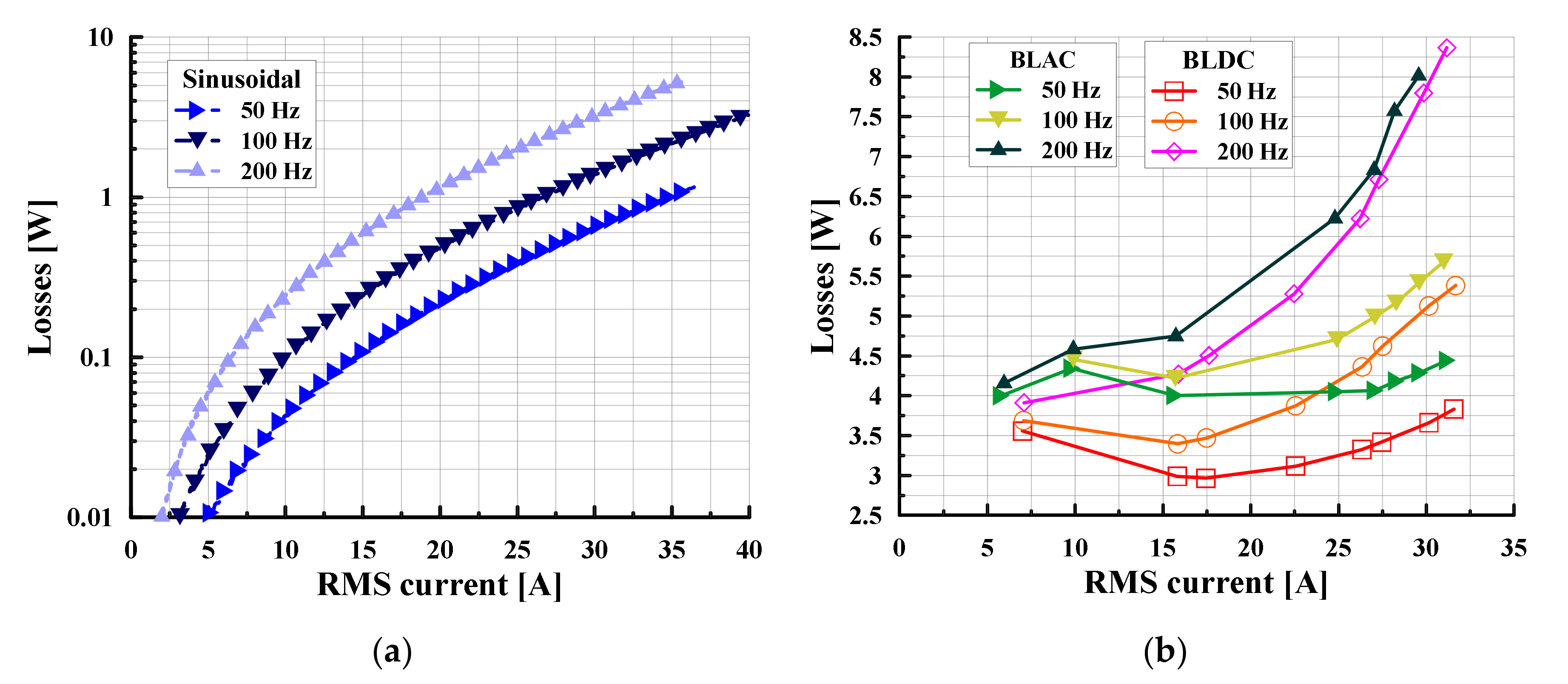
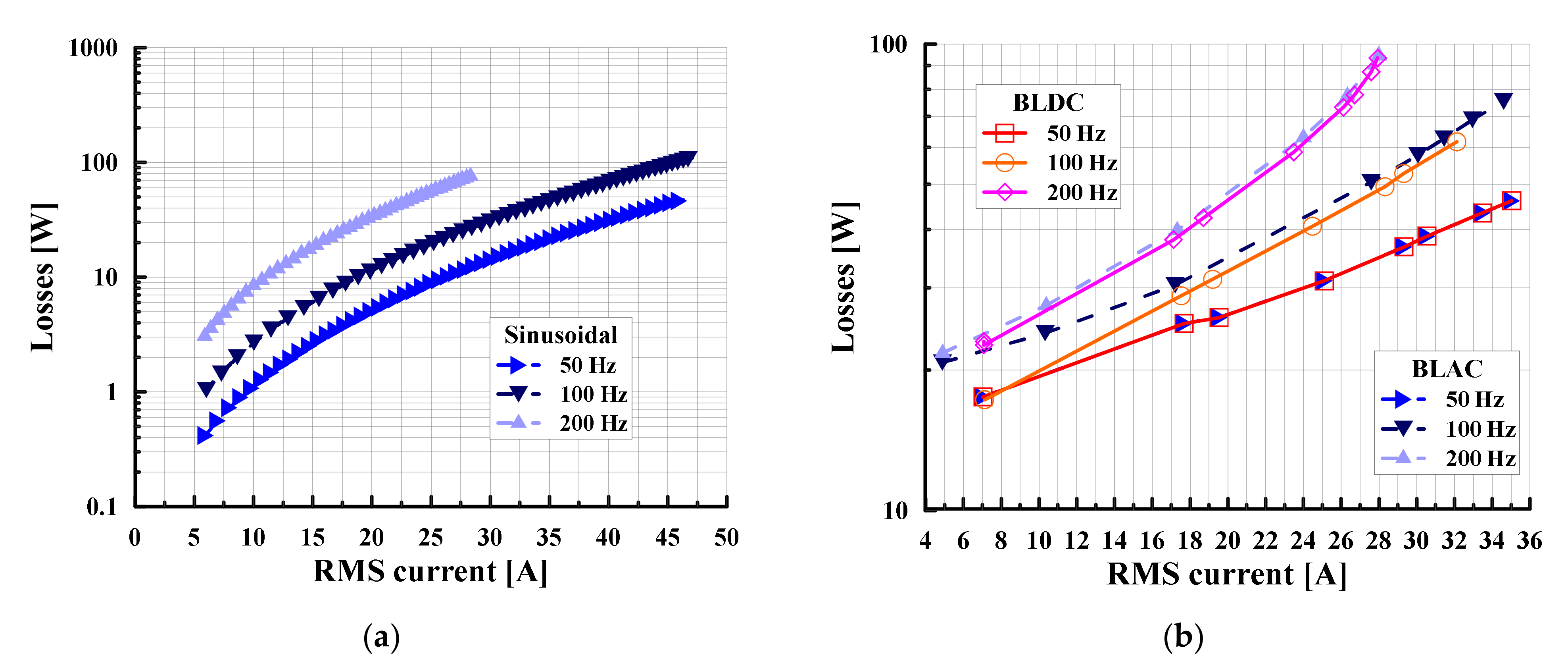
4.1. AC Losses Tests of an Assembled Phase
4.2. AC Losses Tests of an Assembled Phase
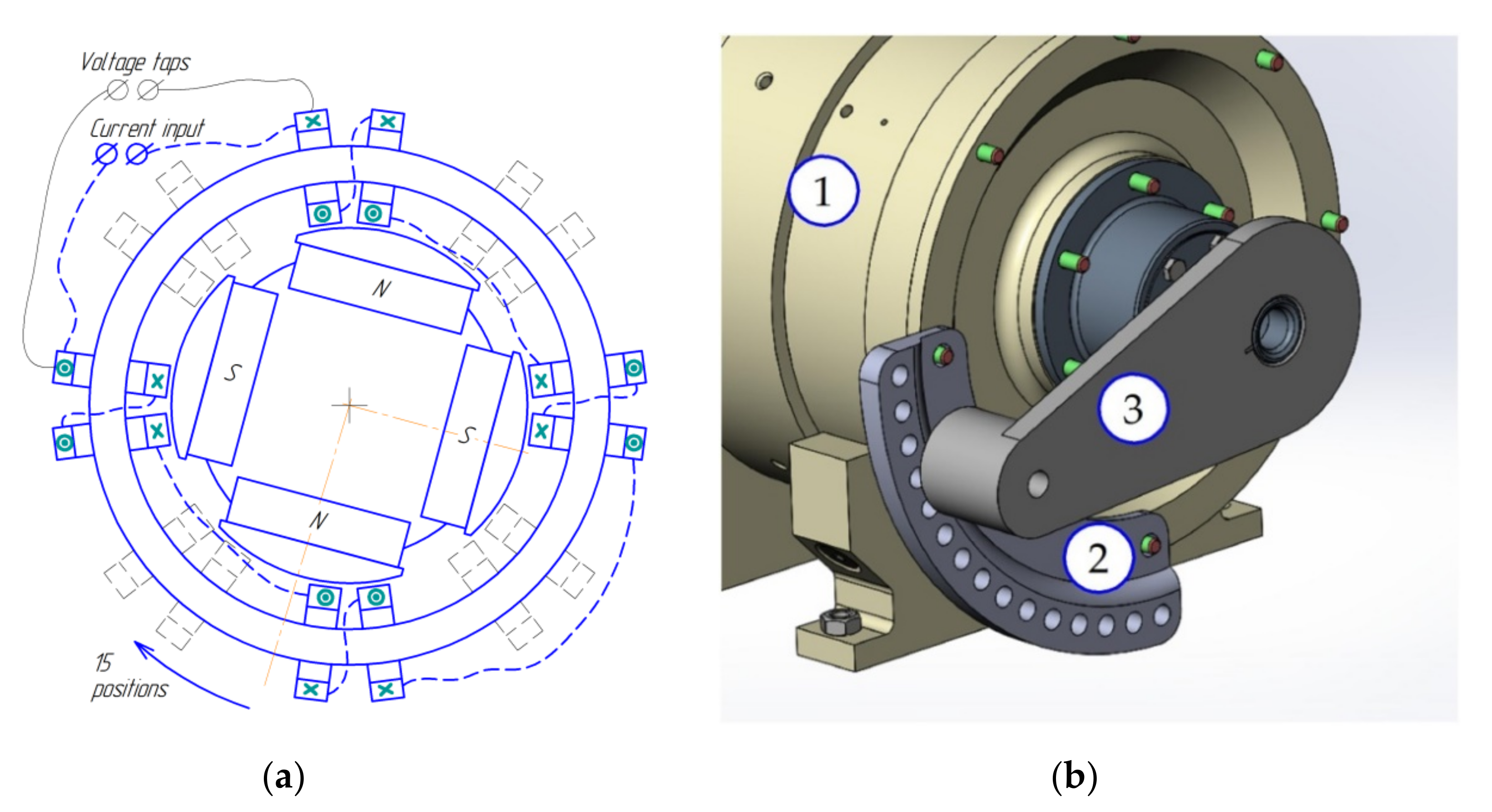
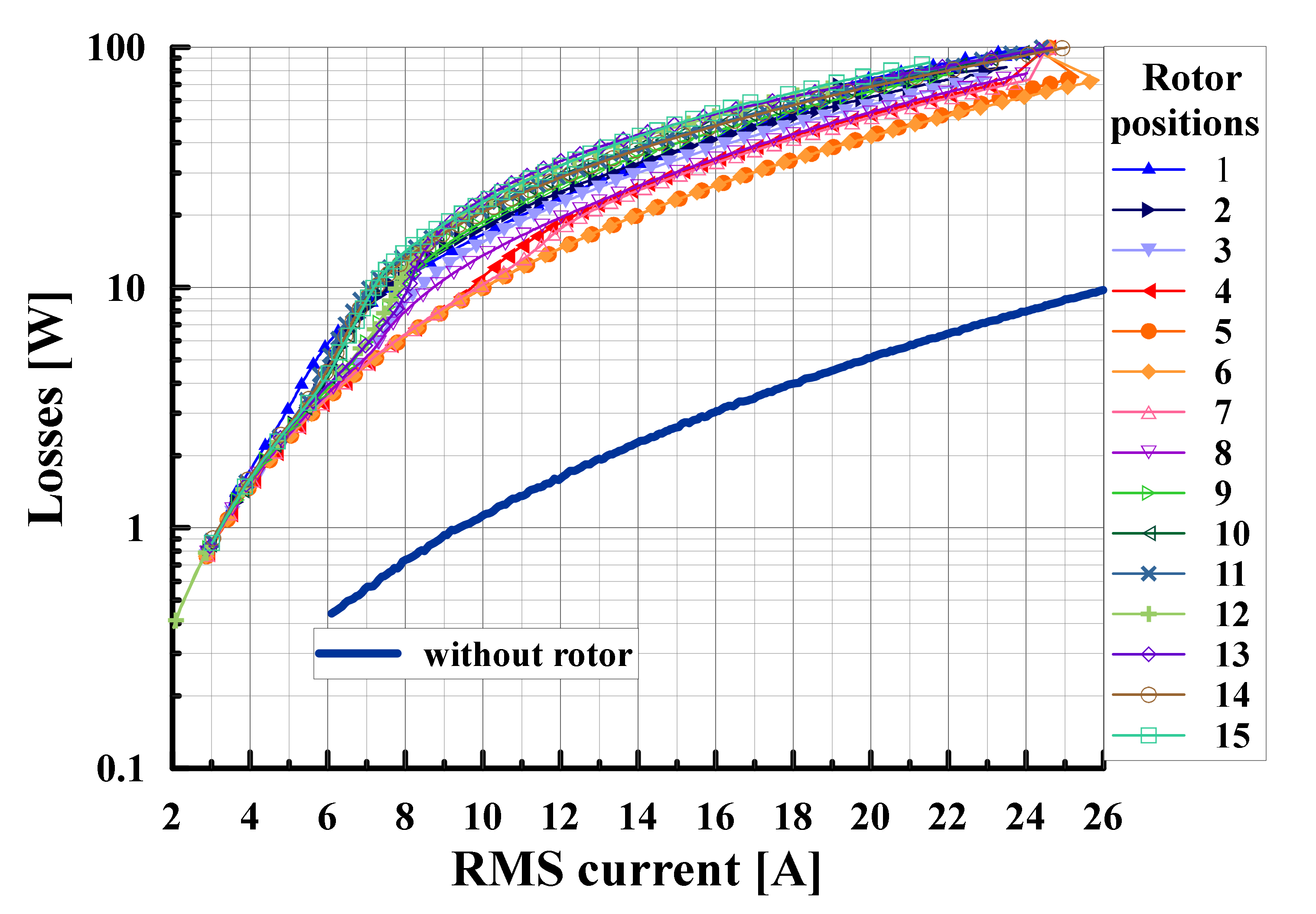
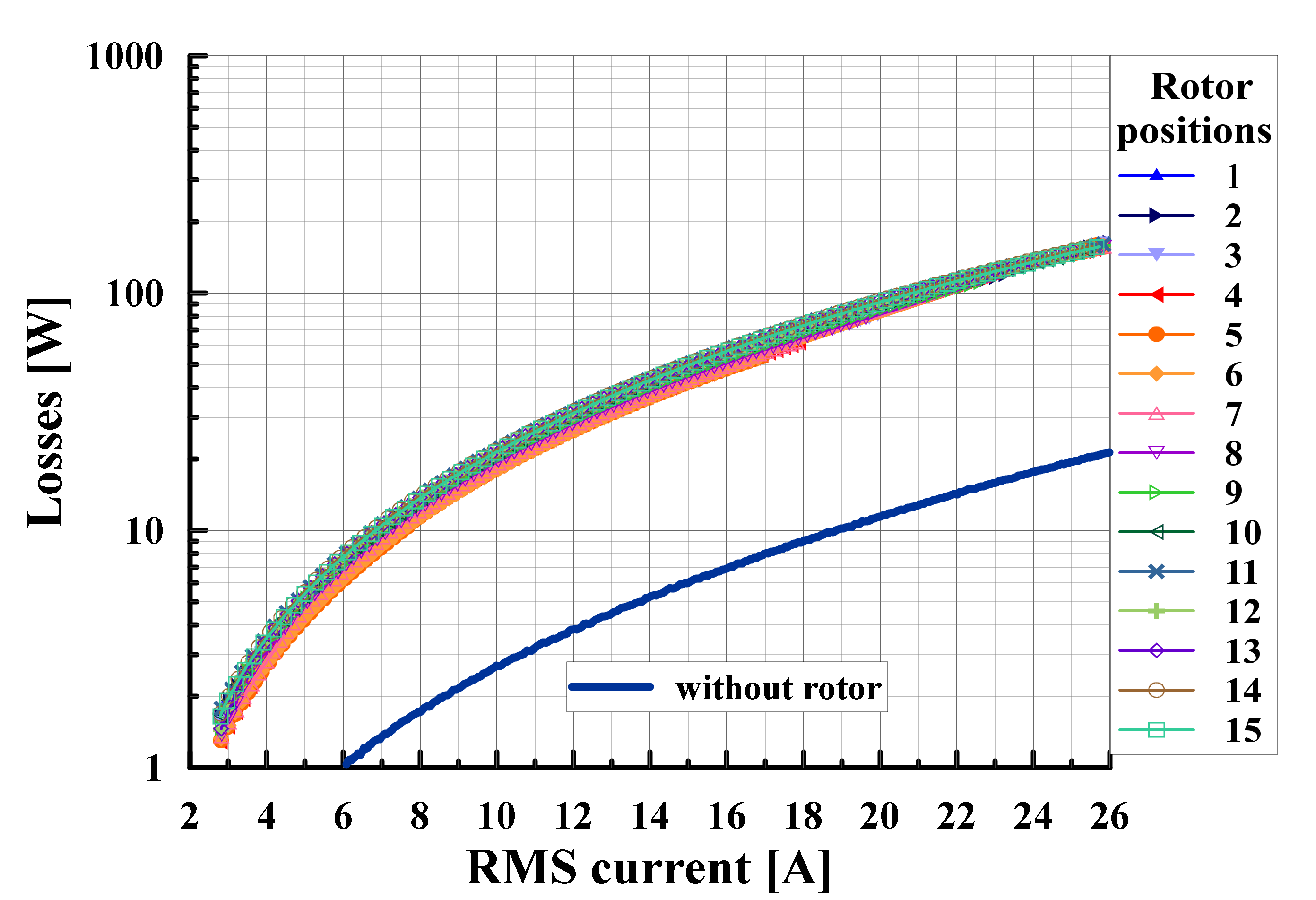
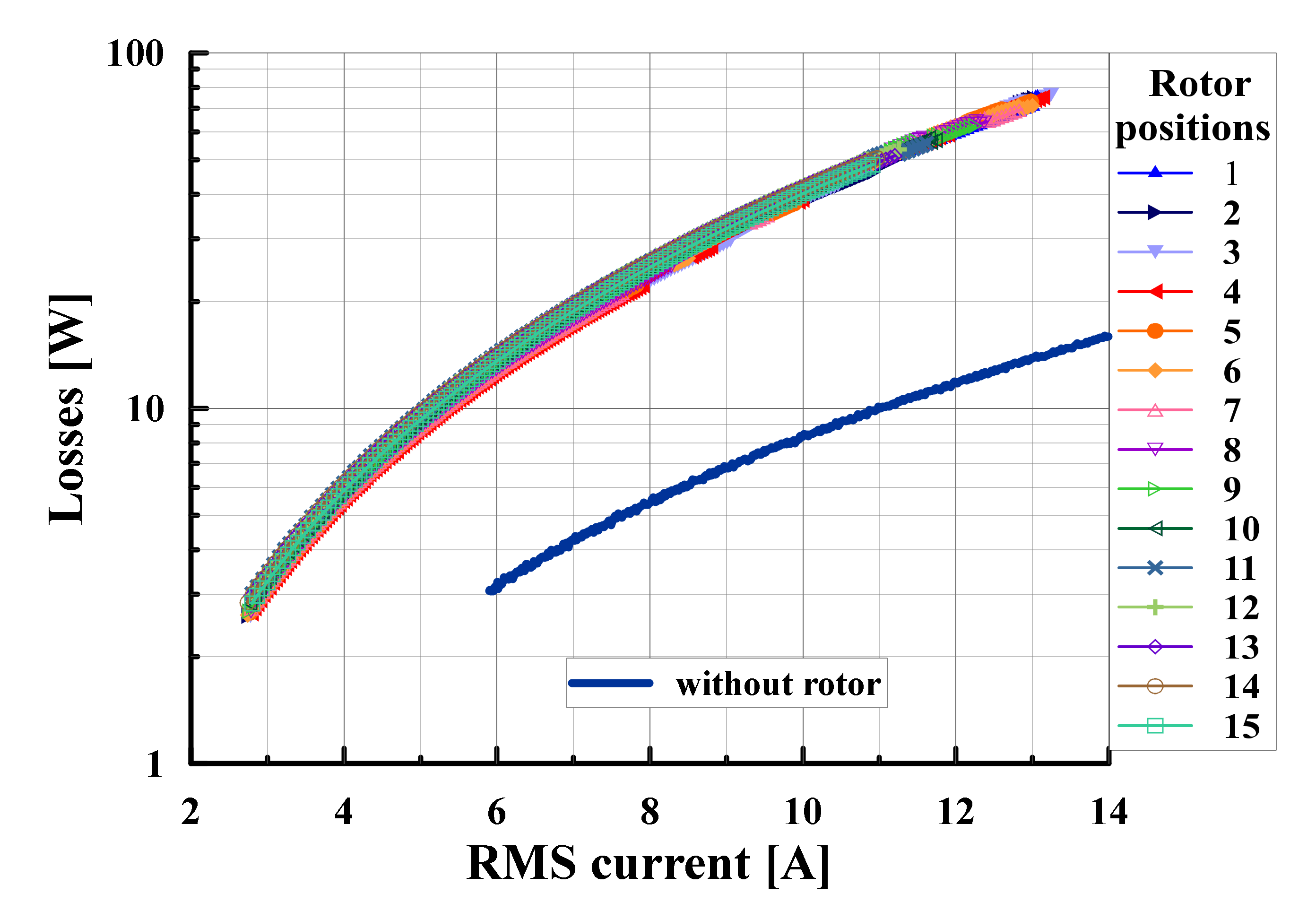
4.3. Experimental Results with Static Rotor
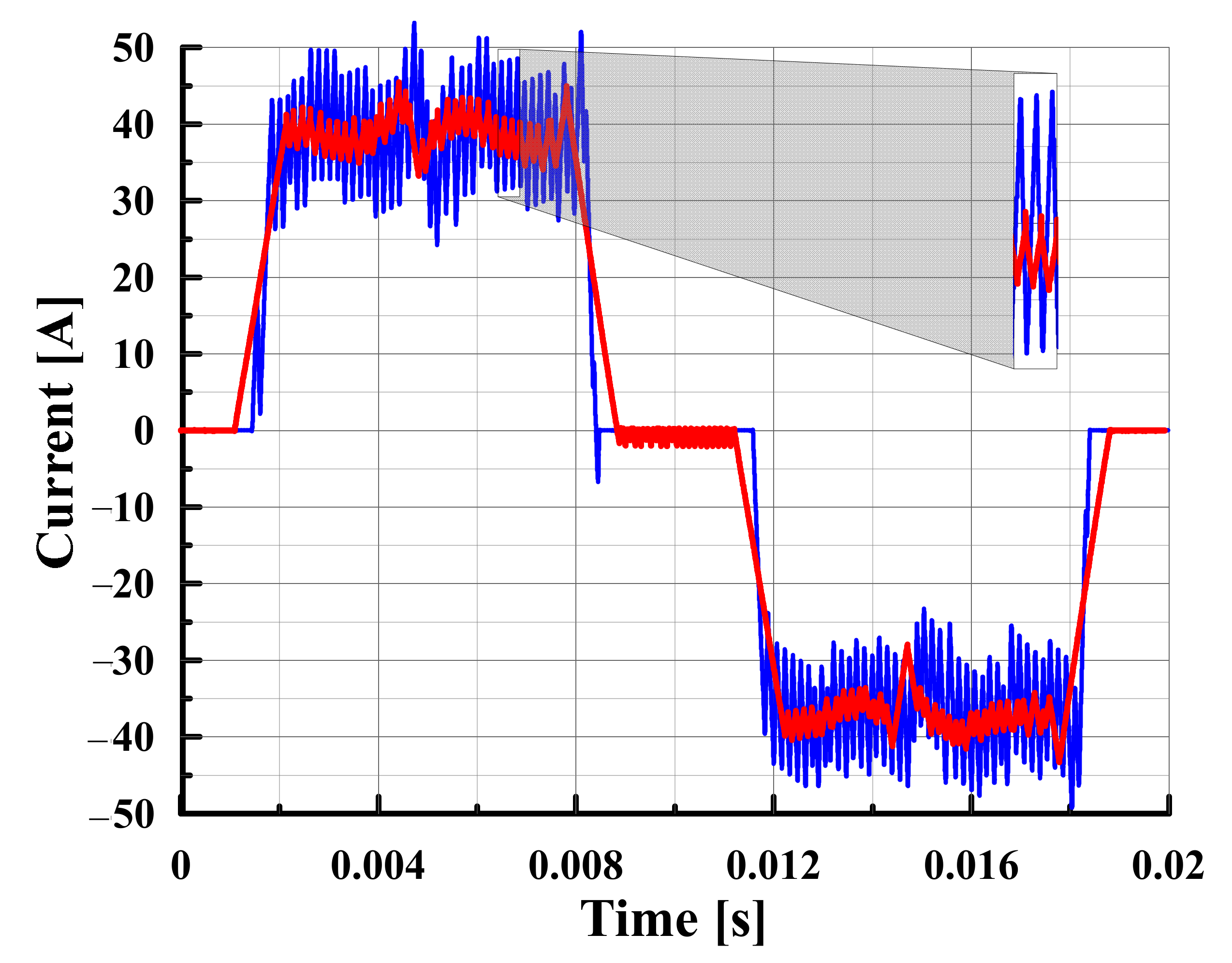
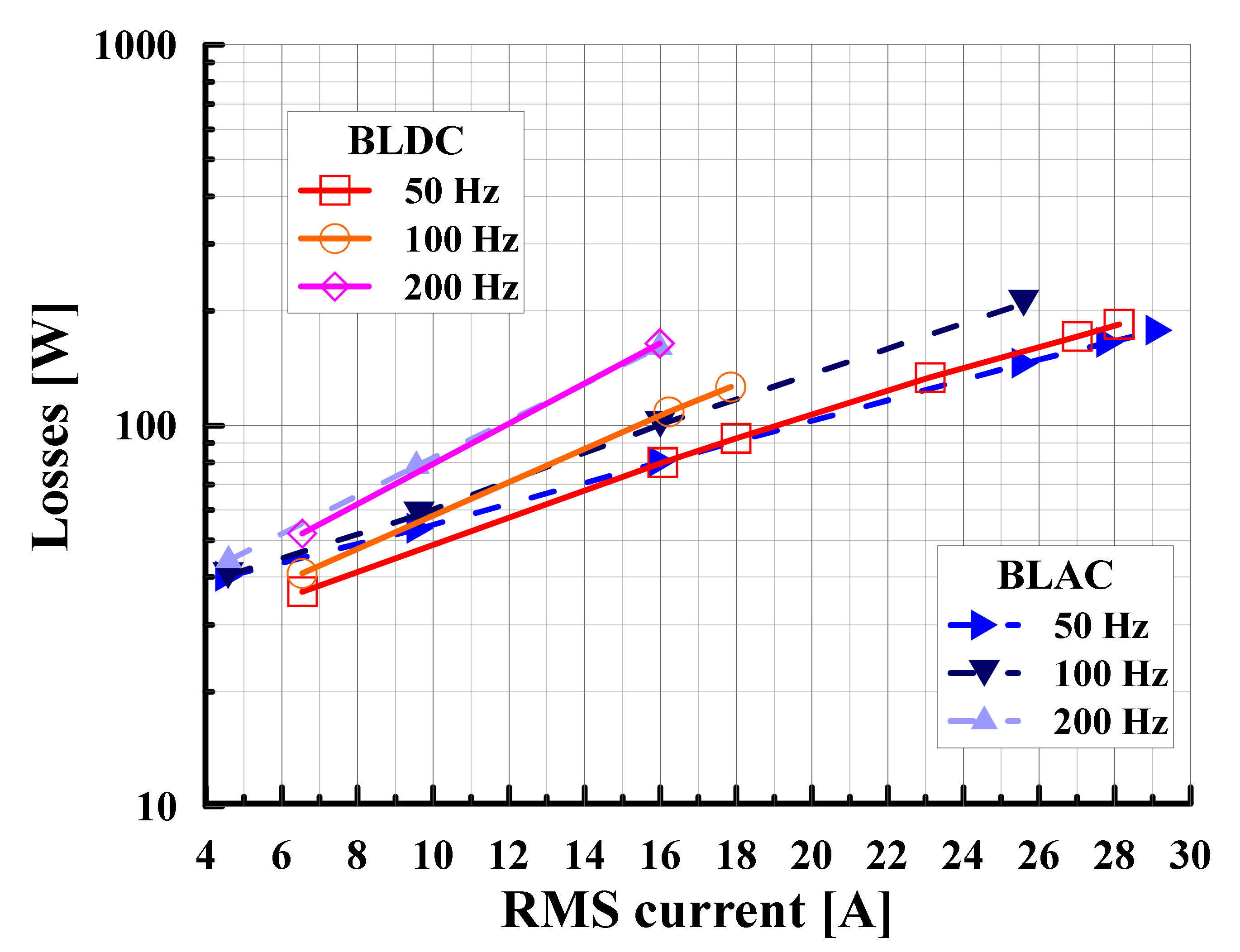
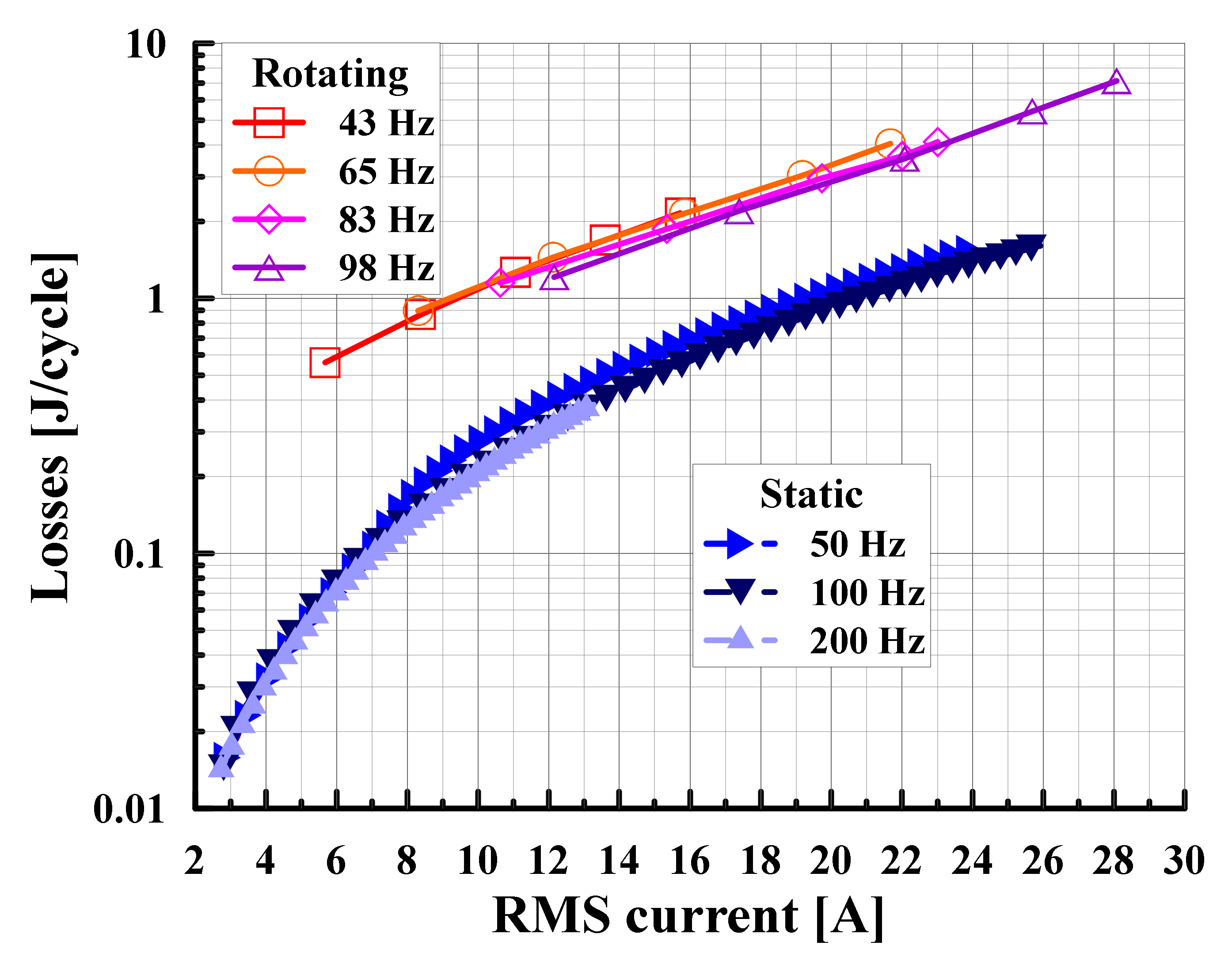
4.4. Experimental Results in Generator Mode
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Grilli, F.; Benkel, T.; Hanisch, J.; Lao, M.; Reis, T.; Berberich, E.; Wolfstadter, S.; Schneider, C.; Miller, P.; Palmer, C.; et al. Superconducting motors for aircraft propulsion: The Advanced Superconducting Motor Experimental Demonstrator project. J. Phys. Conf. Ser. 2020, 1590, 012051. [Google Scholar] [CrossRef]
- Haran, K.S.; Haran, K.; Kalsi, S.; Arndt, T.; Karmaker, H.; Badcock, R.; Buckley, B.; Haugan, T.; Izumi, M.; Loder, D.; et al. High power density superconducting rotating machines—Development status and technology roadmap. Supercond. Sci. Technol. IOP Publ. 2017, 30, 123002. [Google Scholar] [CrossRef]
- Kovalev, K.; Ivanov, N.; Zhuravlev, S.; Nekrasova, J. Development and testing of 10 kW fully HTS generator. J. Phys. Conf. Ser. 2020, 1559, 012137. [Google Scholar] [CrossRef]
- Zhuravlev, S.; Zechikhin, B.; Ivanov, N.; Nekrasova, J. Analytical calculation of the magnetic field in electrical machines with HTS excitation and armature windings. Mater. Res. Express 2019, 6, 076001. [Google Scholar] [CrossRef]
- Larbalestier, D.; Gurevich, A.; Feldmann, D.; Polyanskii, A. High-Tc superconducting materials for electric power applications. Nature 2001, 414, 368–377. [Google Scholar] [CrossRef] [PubMed]
- Kovalev, K.; Penkin, V.; Ivanov, N.; Kosheleva, N.; Serovaev, G. Multidisciplinary Approach to the Design of Superconducting Electrical Machines. IOP Conf. Ser. Mater. Sci. Eng. 2019, 581, 012012. [Google Scholar] [CrossRef]
- Berrospe-Juarez, E.; Zermeño, V.; Trillaud, F.; Grilli, F. Real-time simulation of large-scale HTS systems: Multi-scale and homogeneous models using the T-A formulation. Supercond. Sci. Technol. 2019, 32, 065003. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zhang, M.; Yuan, W. An efficient 3D finite element method model based on the T-A formulation for superconducting coated conductors. Supercond. Sci. Technol. 2017, 30, 024005. [Google Scholar] [CrossRef]
- Benkel, T.; Liu, Y.; Pardo, E.; Reis, T.; Grilli, F. T-A Formulation to Model Electrical Machines with HTS Coated Conductor Coils. IEEE Trans. Appl. Supercond. 2020, 99, 5205807. [Google Scholar] [CrossRef] [Green Version]
- Ainslie, M.; Hu, D.; Zermeno, V.; Grilli, F. Numerical Simulation of the Performance of High-Temperature Superconducting Coils. J. Supercond. Nov. Magn. 2016, 30, 1987–1992. [Google Scholar] [CrossRef] [Green Version]
- Pardo, E.; Grilli, F.; Liu, J.; Wolfstadter, S.; Reis, T. AC Loss Modeling in Superconducting Coils and Motors With Parallel Tapes as Conductor. IEEE Trans. Appl. Supercond. 2019, 29, 5202505. [Google Scholar] [CrossRef] [Green Version]
- Bruyn, B.; Jansen, J.; Lomonova, E. AC losses in HTS coils for high-frequency and non-sinusoidal currents. Supercond. Sci. Technol. 2017, 30, 095006. [Google Scholar] [CrossRef] [Green Version]
- Fetisov, S.; Zubko, V.; Zanegin, S.; Nosov, A.; Vysotsky, V. Numerical Simulation and Cold Test of a Compact 2G HTS Power Cable. IEEE Trans. Appl. Supercond. 2018, 28, 5400905. [Google Scholar] [CrossRef]
- Messina, G.; Yazdani-Asrami, M.; Marignetti, F.; Della Corte, A. Characterization of HTS Coils for Superconducting Rotating Electric Machine Applications: Challenges, Material Selection, Winding Process, and Testing. IEEE Trans. Appl. Supercond. 2021, 31, 2. [Google Scholar] [CrossRef]
- Statra, Y.; Menana, H.; Douine, B. Contribution to the experimental characterization of the electromagnetic properties of HTS. Prog. Electromagn. Res. M 2020, 93, 137–144. [Google Scholar] [CrossRef]
- Shen, B.; Li, C.; Geng, J.; Dong, Q.; Ma, J.; Gawith, J.; Zhang, K.; Li, Z.; Chen, J.; Zhou, W.; et al. Power Dissipation in the HTS Coated Conductor Tapes and Coils Under the Action of Different Oscillating Currents and Fields. IEEE Trans. Appl. Supercond. 2019, 29, 8201105. [Google Scholar] [CrossRef]
- Yazdani-Asrami, M.; Gholamian, S.; Mirimani, S.; Adabi, J. Calculation of AC magnetizing loss of ReBCO superconducting tapes subjected to applied distorted magnetic fields. J. Supercond. Nov. Magn. 2018, 31, 3875–3888. [Google Scholar] [CrossRef]
- Song, W.; Fang, J.; Jiang, Z. Numerical AC loss analysis in HTS stack carrying nonsinusoidal transport current. IEEE Trans. Appl. Supercond. 2019, 29, 5900405. [Google Scholar] [CrossRef]
- Wang, Y.S. Keynote talk—Review of AC loss measuring methods for HTS tape and unit. IEEE Int. Conf. Appl. Supercond. Electromagn. Devices 2013, 534, 14219749. [Google Scholar]
- Weng, F.; Zhang, M.; Lan, T.; Wang, Y.; Yuan, W. Fully superconducting machine for electric aircraft propulsion: Study of AC loss for HTS stator. Supercond. Sci. Technol. 2020, 33, 104002. [Google Scholar] [CrossRef]
- Zhu, K.; Guo, S.; Ren, L.; Xu, Y.; Yan, S.; Liang, S.; Tang, Y.; Shi, J.; Li, J. AC loss measurement of HTS coil under periodic current. Phys. C Supercond. Appl. 2020, 569, 1353562. [Google Scholar] [CrossRef]
- Ainslie, M.; Yuan, W.; Hong, Z.; Pei, R.; Flack, T.; Coombs, T. Modeling and electrical measurement of transport AC loss in HTS-based superconducting coils for electric machines. IEEE Trans. Appl. Supercond. 2011, 21, 3265–3268. [Google Scholar] [CrossRef]
- Zanegin, S.; Ivanov, N.; Shishov, D.; Shishov, I.; Kovalev, K.; Zubko, V. AC losses test of HTS racetrack coils for HTS motor winding. J. Phys. Conf. Ser. 2020, 1559, 12142. [Google Scholar] [CrossRef]
- LOCTITE® STYCAST 2850FT [Electronic Resource]. Available online: https://www.henkel-adhesives.com/us/en/product/potting-compounds/loctite_stycast_2850ftbl.html (accessed on 18 March 2021).
- Zubko, V.; Fetisov, S.; Zanegin, S.; Nosov, A.; Vysotsky, V. Optimization of 2G HTS Current Leads Working at External Magnetic Field. IEEE Trans. Appl. Supercond. 2017, 99, 4800205. [Google Scholar] [CrossRef]
- Vysotsky, V.; Fetisov, S.; Zubko, V.; Zanegin, S.; Nosov, A.; Ryabov, S.; Bykovsky, N.; Svalov, G.; Volkov, E.; Fleishman, L.; et al. Development and Test Results of HTS Windings for Superconducting Transformer with 1 MVA Rated Power. IEEE Trans. Appl. Supercond. 2017, 27, 5500105. [Google Scholar] [CrossRef]
- Yazdani-Asrami, M.; Zhang, M.; Yuan, W. Challenges for developing high temperature superconducting ring magnets for rotating electric machine applications in future electric aircrafts. J. Magn. Magn. Mater. 2021, 522, 167543. [Google Scholar] [CrossRef]
- Zanegin, S.; Ivanov, N.; Shishov, D.; Shishov, I.; Kovalev, K.; Zubko, V. Manufacturing and Testing of AC HTS-2 Coil for Small Electrical Motor. J. Supercond. Nov. Magn. 2019, 33, 355–359. [Google Scholar] [CrossRef]
- Kovalev, K.; Zhuravlev, S.; Rusanov, D.; Ivanov, N.; Zanegin, S.; Podguzov, V. Experimental research of stator with HTS ring winding. In Proceedings of the 2020 International Conference on Electrotechnical Complexes and Systems, Ufa, Russia, 27–30 October 2020. [Google Scholar]
- Michal, V. Three-Level PWM Floating H-Bridge Sinewave Power Inverter for High-Voltage and High-Efficiency Applications. IEEE Trans. Power Electron. 2016, 31, 4065–4074. [Google Scholar] [CrossRef]
- Lee, S.; Heng, Y. Improved Single-Phase Split-Source Inverter with Hybrid Quasi-Sinusoidal and Constant PWM. IEEE Trans. Ind. Electron. 2017, 64, 2024–2031. [Google Scholar] [CrossRef]
- Yazdani-Asrami, M.; Song, W.; Zhang, M.; Yuan, W.; Pei, X. Magnetization Loss in HTS Coated Conductor Exposed to Harmonic External Magnetic Fields for Superconducting Rotating Machines. IEEE Access 2021, 9, 1. [Google Scholar] [CrossRef]
- Yazdani-Asrami, M.; Song, W.; Zhang, M.; Yuan, W.; Pei, X. AC transport loss in superconductors carrying harmonic current with different phase angles for large-scale power components. IEEE Trans. Appl. Supercond. 2020, 31, 5900205. [Google Scholar]
- ANSYS Multiphysics, Release 16, ANSYS Inc [Electronic Resource]. Available online: https://www.ansys.com/it-solutions/platform-support/previous-releases (accessed on 18 March 2021).
- Zanegin, S.; Ivanov, N.; Zubko, V.; Kovalev, K.; Shishov, I.; Podguzov, V. Losses analysis of HTS racetrack coil operating in an external magnetic field. In Proceedings of the 2020 International Conference on Electrotechnical Complexes and Systems, Ufa, Russia, 27–30 October 2020. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 2G tape type | AMSC, 5 mm wide |
| Min. critical current Ic, at 77 K, A | 100 |
| Insulation | Kapton |
| Coil type | Double pancake |
| Number of turns | 24 |
| Length of linear part, mm | 100 |
| Coil height, mm | 10 |
| Winding height, mm | 7 |
| Total wire length, m | 8 |
| Position of the Rotor, Degrees | Measured Critical Current, A | The Ratio of the Ic w/without Rotor |
|---|---|---|
| 0 | 44.4 | 0.5 |
| 25.6 | 42.8 | 0.48 |
| 45 | 45.8 | 0.51 |
| 76.8 | 47.9 | 0.54 |
| 90 | 42.2 | 0.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zanegin, S.; Ivanov, N.; Zubko, V.; Kovalev, K.; Shishov, I.; Shishov, D.; Podguzov, V. Measurements and Analysis of AC Losses in HTS Windings of Electrical Machine for Different Operation Modes. Appl. Sci. 2021, 11, 2741. https://doi.org/10.3390/app11062741
Zanegin S, Ivanov N, Zubko V, Kovalev K, Shishov I, Shishov D, Podguzov V. Measurements and Analysis of AC Losses in HTS Windings of Electrical Machine for Different Operation Modes. Applied Sciences. 2021; 11(6):2741. https://doi.org/10.3390/app11062741
Chicago/Turabian StyleZanegin, Sergey, Nikolay Ivanov, Vasily Zubko, Konstantin Kovalev, Ivan Shishov, Dmitry Shishov, and Vladimir Podguzov. 2021. "Measurements and Analysis of AC Losses in HTS Windings of Electrical Machine for Different Operation Modes" Applied Sciences 11, no. 6: 2741. https://doi.org/10.3390/app11062741
APA StyleZanegin, S., Ivanov, N., Zubko, V., Kovalev, K., Shishov, I., Shishov, D., & Podguzov, V. (2021). Measurements and Analysis of AC Losses in HTS Windings of Electrical Machine for Different Operation Modes. Applied Sciences, 11(6), 2741. https://doi.org/10.3390/app11062741