1. Introduction
The usefulness of computer graphics in various fields has long been emphasized since its origin [
1,
2].
Ray tracing is a graphics method, based on the individual optical path tracing to get realistic illustrations, as shown in
Figure 1. More precisely, this method traces millions of rays (or optical paths), which are intersecting, scattering, and reflecting on object surfaces, with a huge amount of computations [
3,
4]. Mainly due to its computation cost, it is considered as nearly impossible to carry it out on run time [
5,
6].
With the need for the immediate visualization, graphics processors were demanded to be specialized in the traditional
rasterization technique, consuming conspicuously lower resources than the ray tracing in the cost of low precision [
7,
8].
In contrast, rasterization cannot compute optical phenomena such as scattering and/or reflection, resulting in comparatively unrealistic illumination as a result. Research has been made to overcome this drawbacks, introducing novel ideas such as
image-based lighting,
irradiance probe,
pre-processed global illumination, and more [
9,
10,
11]. More recently,
hybrid methods using both rasterization and ray tracing technique have been introduced to qualify the demands for truthful illumination and is still an ongoing topic;
screen-space global illumination,
voxel-based global illumination, and
photon mapping are a few of them [
12,
13,
14,
15,
16].
In this paper, we present our research and implementation of the real-time ray-traced rendering engine, tackling the previously known to be bound to the pre-rendering domain. We introduce the real-time implementation of a triangle primitive, based the ray tracing method on the top of the GPGPU compute shader, along with optimization and light approximation techniques. We also present the solutions to the detailed issues, which we encountered during its design and implementation.
2. Related Works
In computer graphics field, interactive realistic graphics results have long been pursued [
17,
18]. Ray tracing is one of them, but it has only recently been applied and commercialized due to its immense computing cost in real-time. Since it considers
global illumination environment, rather than the traditional
local illumination settings, the ray tracing is one of the
global illumination and/or
indirect illumination methods [
6,
19]. It enables the rendering pipeline to achieve more realistic graphics rendering, as shown in
Figure 1.
Ray tracing is actually rendering an image by recursively tracing optical paths from the viewer’s eye to virtual light sources
per pixel [
5]. It considers reflection, refraction, and scattering to ultimately compose the luminosity upon the ray’s surface contact [
20]. From its accelerated implementation point of view, we should consider two different aspects:
global object management for the efficient ray-object intersection checks, and
accelerated reflection computing at the intersection points.
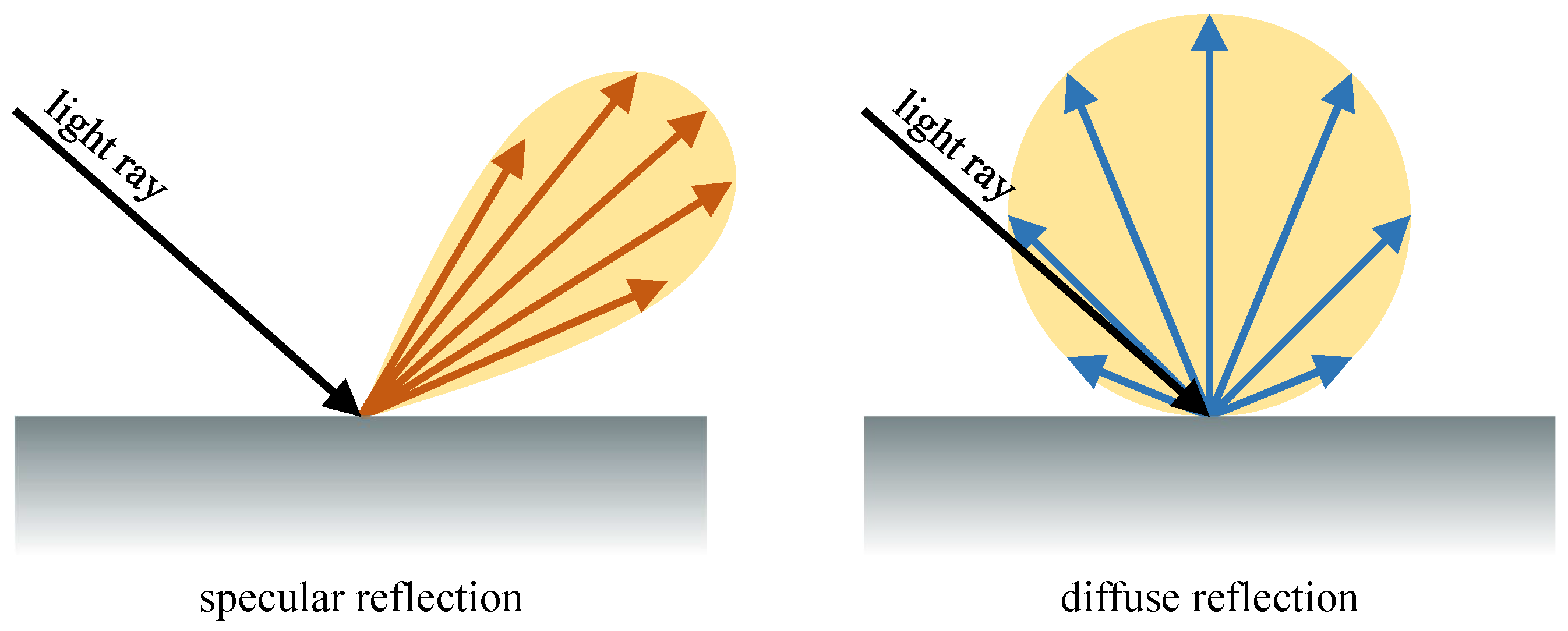
Reflection computing is again macroscopically divided into two parts:
specular and
diffuse. The
specular reflection is a regular reflection on a mirror-like surface, and the
diffuse reflection is a light scattering occurred on a rough surface, as shown in
Figure 2.
Theoretically, the rays can be traced infinitely, to get the huge number of
reflected bounces. In contrast, practical implementations limits the reflection computing to get real-time results. The two major factors of the real-time reflection computing is:
ray bouncing count and
ray sampling count. These factors are also related to the final quality of the ray traced rendering images [
6,
20].
Specular reflection is highly associated with the ray bouncing count, which refers to how much will the single ray bounce between the object surfaces. Likewise, diffuse reflection is associated with the ray sampling count referring to how many rays will be fired on the reflection points. The sampling attribute also affects the anti-aliasing quality of the image, since it is actually one of the super-sampling methods.
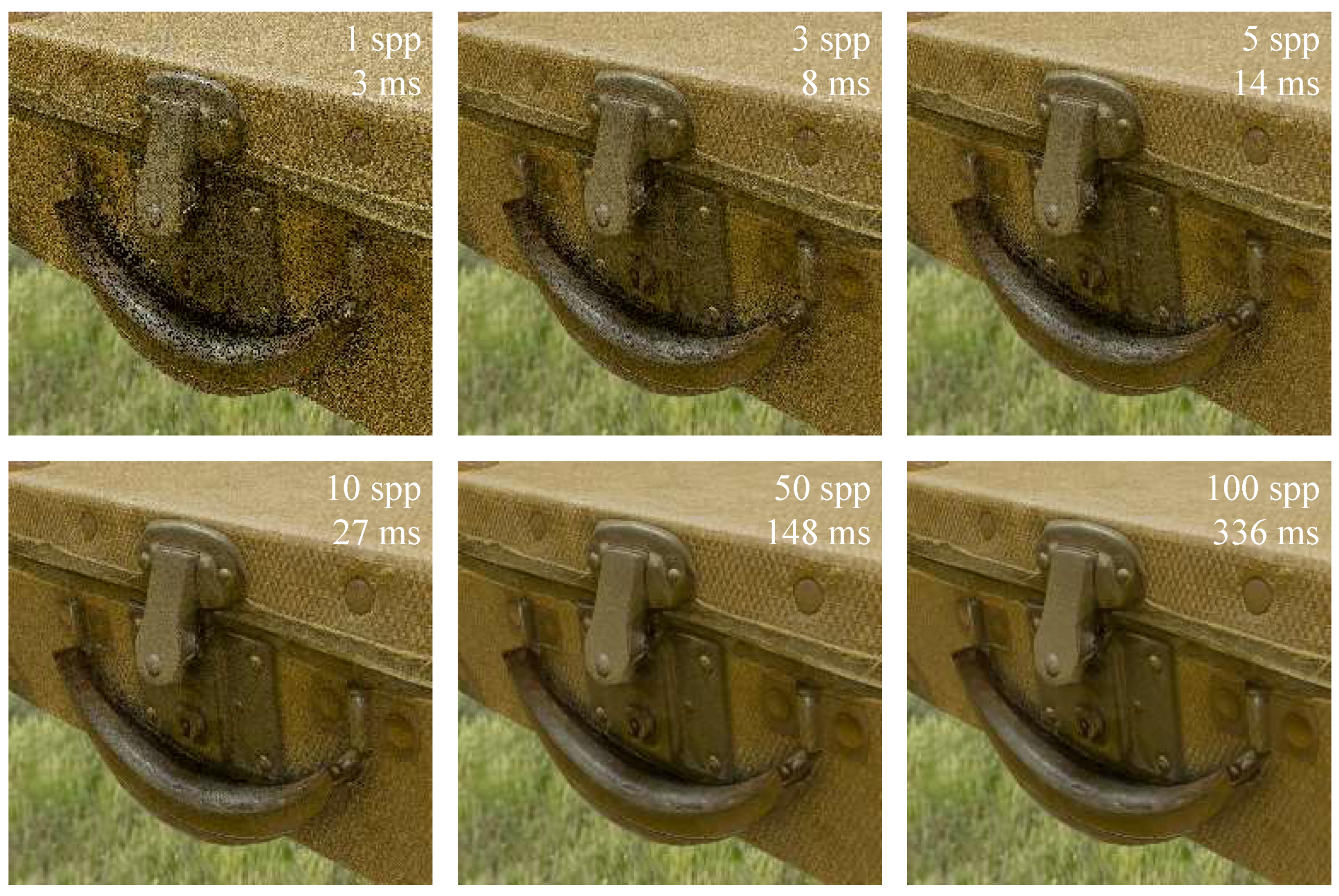
The ray bouncing is known to be significantly cost-effective than the ray sampling since it occurs seldom in the actual rendering environment; five to six bounces is more than enough in most rendering cases. Ray sampling, on the other hand, is the major reason why ray tracing lacks performance in real-time rendering all the time; due to its nature of
omni-directional light scattering, not enough ray sampling will produce disturbingly noisy illumination as a result.
Figure 3 depicts the performance and precision of the implemented diffuse reflection.
In our implementation, these ray bouncing counts and ray sampling counts can be controlled to compromise the final image quality and also the processing speed.
Another aspect of the ray tracing computation is the global object management.
Ray casting is the fundamental steps for performing the
ray-object interactions. It is actually a procedure of ray collision checking in the virtual space [
21,
22]. The simplest form of ray casting is to compare all the primitives (or graphics objects) against the ray, taking the time complexity of
against
n objects in the scene. This
per-ray operation therefore ought to get costly as the scene gets populated with more objects, leading the programmers to import the acceleration structure to reduce the cost down to logarithmic as a necessary step [
23].
Two major methods lie for the ray casting acceleration structures:
kd-tree and
Bounding Volume Hierarchy (BVH) [
24,
25,
26,
27]. As an example, in
Figure 4, a set of triangles labeled with alphabets from
A to
F denotes the primitives in the scene. The
kd-tree is one of the axis-aligned space partitioning methods which divides the current space into two separate child spaces recursively, to construct a binary tree, as shown in
Figure 4b.
Bounding Volume Hierarchy (BVH), on the other hand, is also a binary tree, but it constructs a tree based on geometric objects, as shown in
Figure 4c. The
kd-tree recursively divides the space into half, while the BVH tree recursively groups the graphics primitives and spaces. Note that the child volumes of the BVH structure can be partially overlapped. Recently, benchmarks show that BVH implementations are much better than traditional
kd-tree structures [
27,
28], and we also adopt the BVH structure as our major data structure.
Recent advancement of graphics hardware has allowed a great leap towards real-time ray-traced rendering [
17,
18].
Nvidia’s latest graphics processing units
RTX series are the first runner of its kind; it supports real-time ray tracing with its specialized architecture [
29]. While the RTX shows an astounding accomplishment, its technical features are rigidly bound to its physical hardware support.
There are attempts to achieve real-time ray tracing support without utilizing specialized hardware, better accustomed to welcome much general graphics processor owners. One of its latest and outstanding attempt is by
Unreal Engine 4, the commercial game engine serviced since 2014 [
30]. Its ray-traced global illumination feature can run without RTX feature limitation. However, its ray-tracing pipeline is built-in to the engine, leaving us no freedom of customizing the illumination method.
3. Design
We naturally performs the ray-object intersection checks first, and then, the ray reflection computing. In the case of the global-space ray-object intersections, we adopt the Bounding Volume Hierarchy (BVH) as our major data structure. The details will be followed.
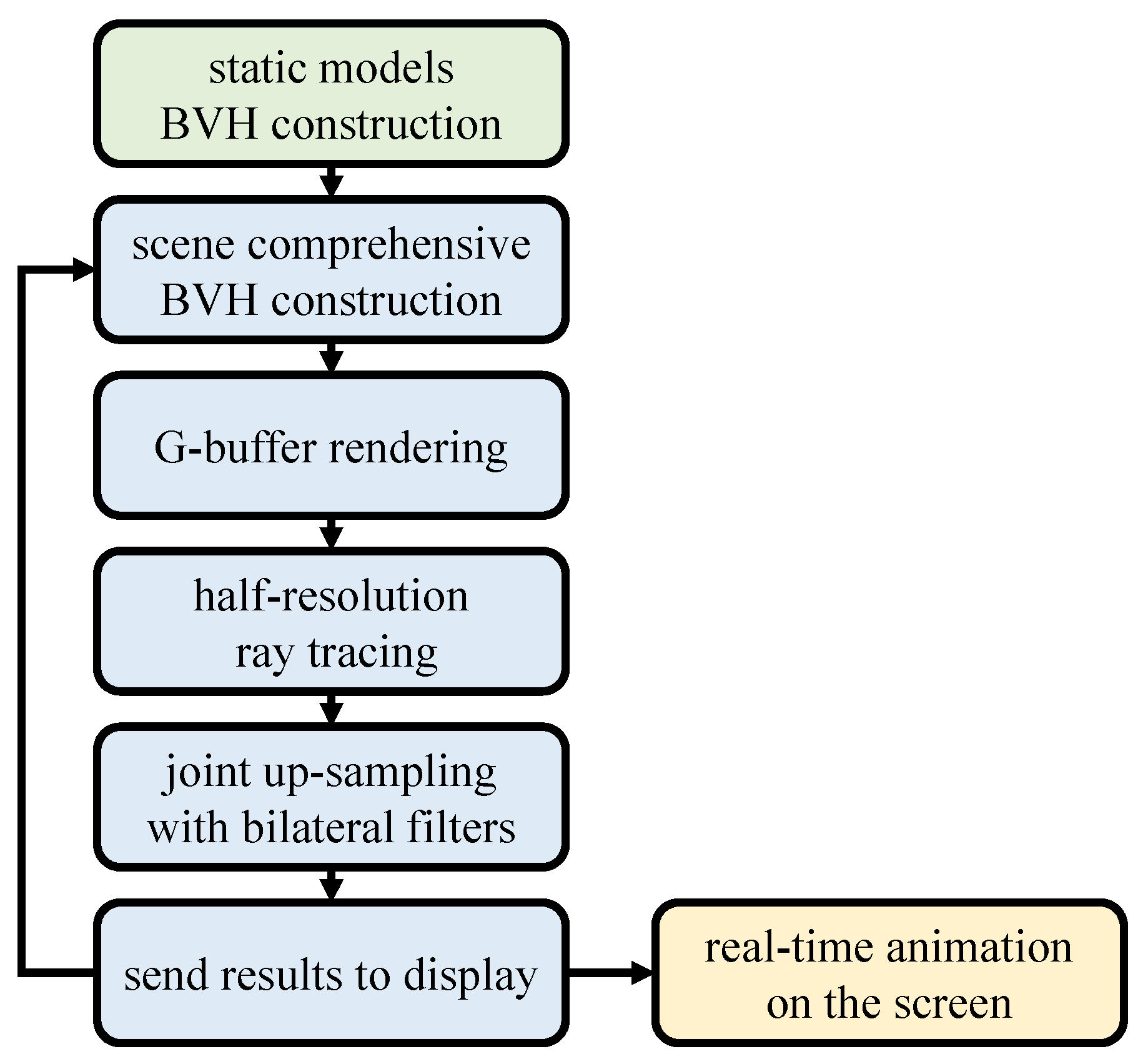
Figure 5 demonstrates the overall architecture of our ray tracing engine. Building the BVH tree takes two steps:
per static model construction and
scene comprehensive construction. At the beginning, we pre-generate BVH data for static models, referring to the graphical models which do not move or deform its shape in run time. This way we can avoid BVH tree generation overhead on the run. In the next step, we generate a comprehensive BVH tree advantaging from the pre-generated model BVH trees. This procedure is later discussed in
Section 3.1 and
Section 3.2.
The rest of the part is all performed on the GPU
compute shaders and is based on the
ray-tracing upsampling method [
26]. We compute normal vectors, depth values, and material attributes just as in a deferred rendering pass and followed by the ray-traced illumination approximation. The final rendering composition of the scene is displayed through the frame buffer, and we loop back to the scene comprehensive BVH construction for the next frame until termination. An in-depth explanation of this ray-tracing procedure is in
Section 3.3.
3.1. BVH Tree Construction
Bounding Volume Hierarchy is one of the well-known hierarchical approaches to the ray tracing acceleration structures, which handles the operation at a significantly lower cost than without it [
23]. It stores the scene data into a binary tree where primitives are recursively wrapped in the bounding volumes, ultimately composing one unified volume on the root of the tree. After its construction, the ray can then traverse down the tree checking intersections with the bounding volume at each node, excluding the primitives which are not in the active ones.
Fast and efficient Boundary Volume Hierarchy tree construction is another interesting aspect of its design. Analysis of its approach is still ongoing despite its aged foundation and is recently aimed at building an inexpensive and dynamic structure for its practical usage [
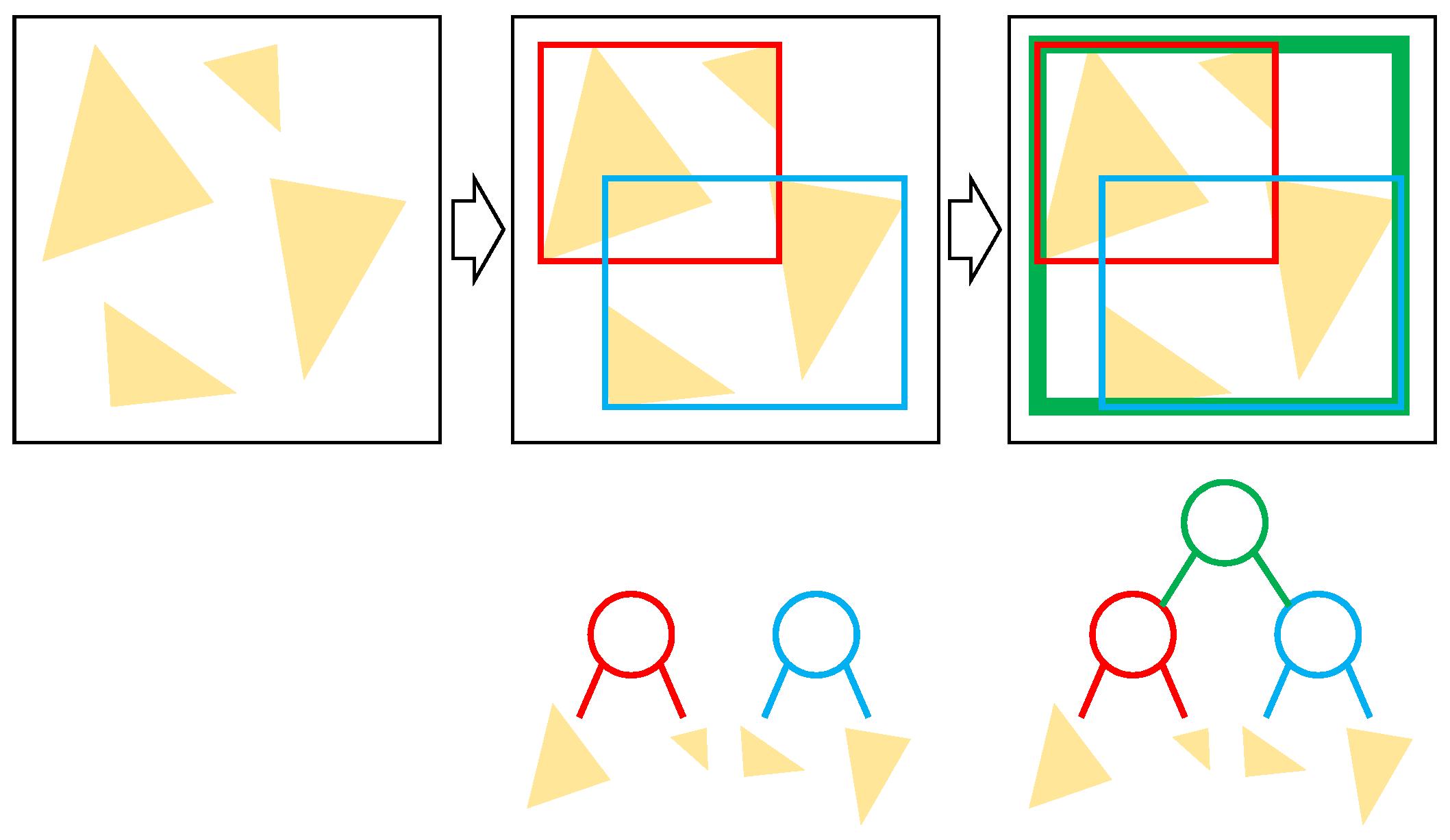
23]. Nonetheless, we implemented a simple bottom-up breadth-first tree generation valuing simpleness over completeness.
We pair the primitives close to each other’s
centroid, leaving a list of single-depth tree nodes, which has the primitives as the child. We then recursively pair the nodes again with the closest centroid, building the tree bottom to top, until it reaches the root node where there are no more nodes to be paired.
Figure 6 visualizes this bottom-up breath-first approach.
Although this algorithm provides an efficient enough BVH tree to be traversed, its unstable construction time is a drawback. It has the worst time complexity of , dramatically lowering the performance as the number of primitives n increases.
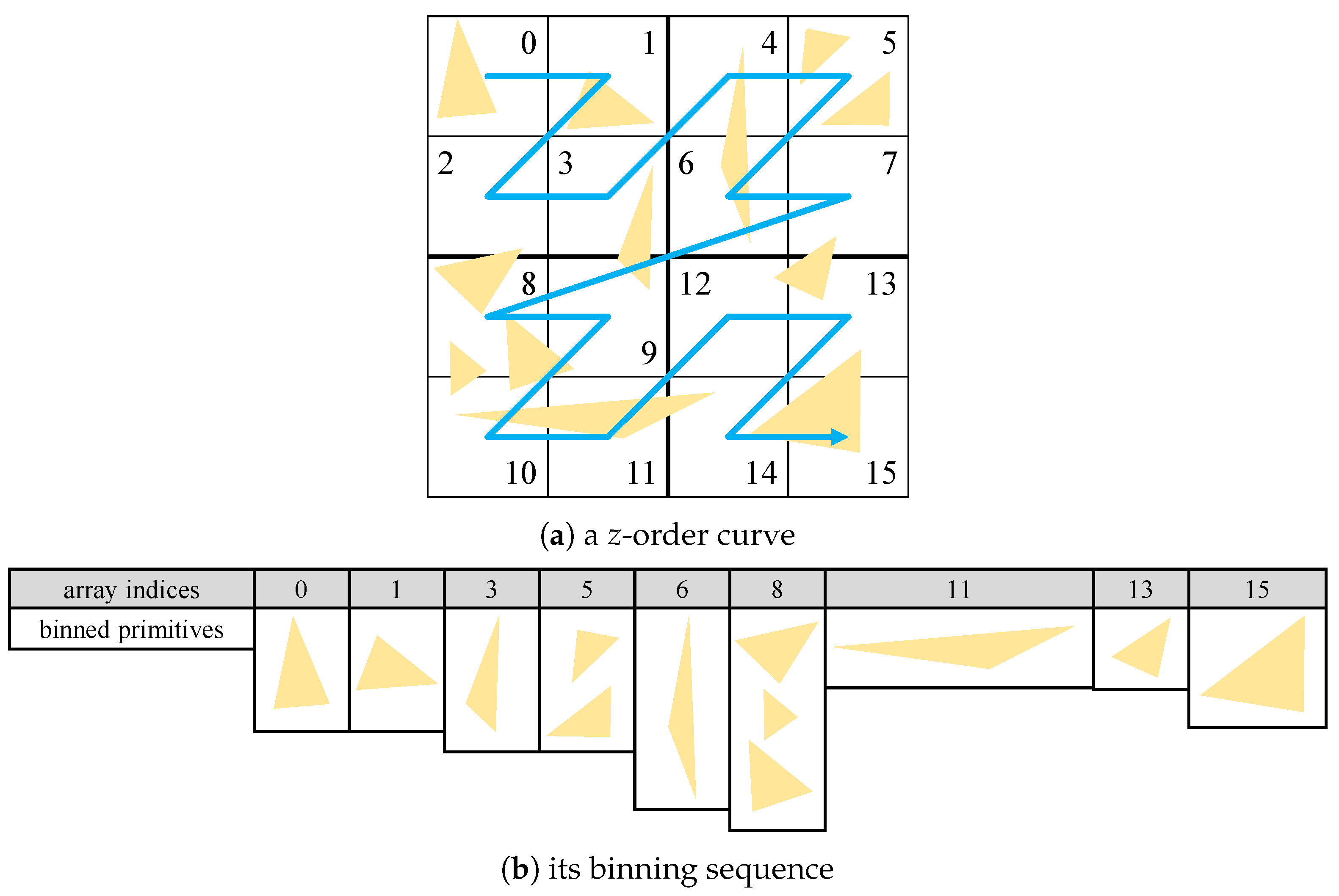
To speed up this process, we exploited Lauterbach’s
Morton code method [
31]. The space-awareness characteristics of the Morton code, which is also known as the
z-order curve, allows us to organize the primitives in the octree hierarchy [
28,
32]. Primitives are first binned into the
z-ordered array indexed by their centroid.
Figure 7 explains this
z-ordering sequence with a sample 2D quad-tree representation.
Once all the primitives are grouped, we generate BVH trees for each bin and merge them to create one complete tree for the model. This greatly reduces the overhead of closest centroid searching with neglectable precision loss. Our experimental results will be presented in
Section 4.
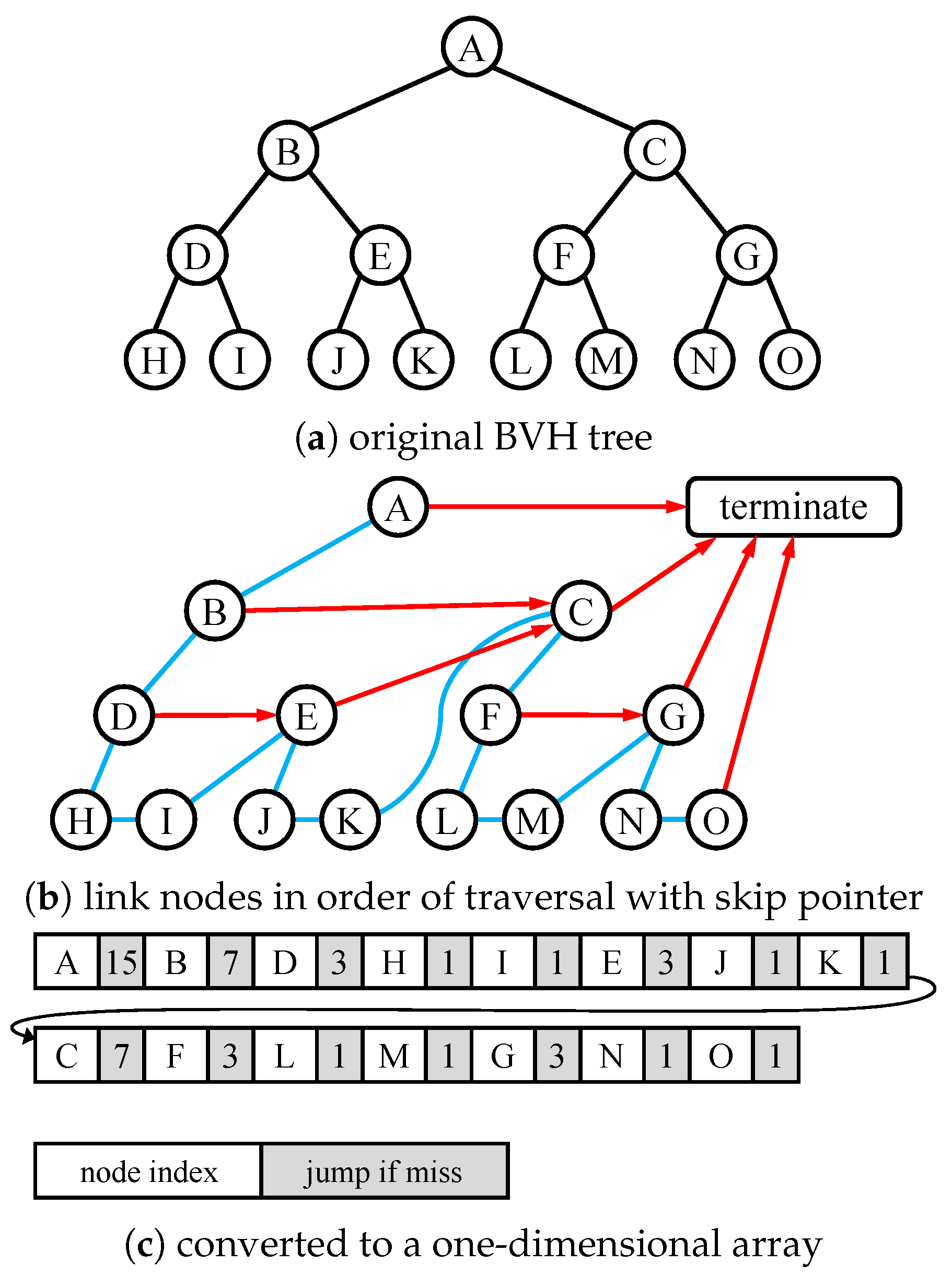
The constructed tree is now transferred to the video memory (VRAM) and hundred millions of rays are evaluated with the
compute shader. We found the
roped BVH structure to be optimal when sending the tree data to GPU [
28,
32]; it ensures stackless traversal by storing a skip pointer instead of the parent-sibling tree structure.
Figure 8 demonstrates the creation of an example roped BVH, in a step by step manner [
33,
34]. Blue lines represent the tree traversal in the left-to-right order, while red arrows represent skip pointers where iteration will skip to when the current volume is not hit. After linking the nodes by the traversal order, we convert the tree into an array and send it to the GPU as a
texture. The tree will be traversed with the code in Pseudocode 1.
Pseudocode 1. Pseudo code for the Roped BVH tree traversal.
| i = 0 |
| whilei < bvh.size(): |
| if bvh[i] is a primitive: |
| perform and record the ray-object intersection check |
| else if the ray does not hit the bounding volume of bvh[i]: |
| i += bvh[i].skip_index |
| else: |
| i++ |
3.2. Dynamic Object Handling
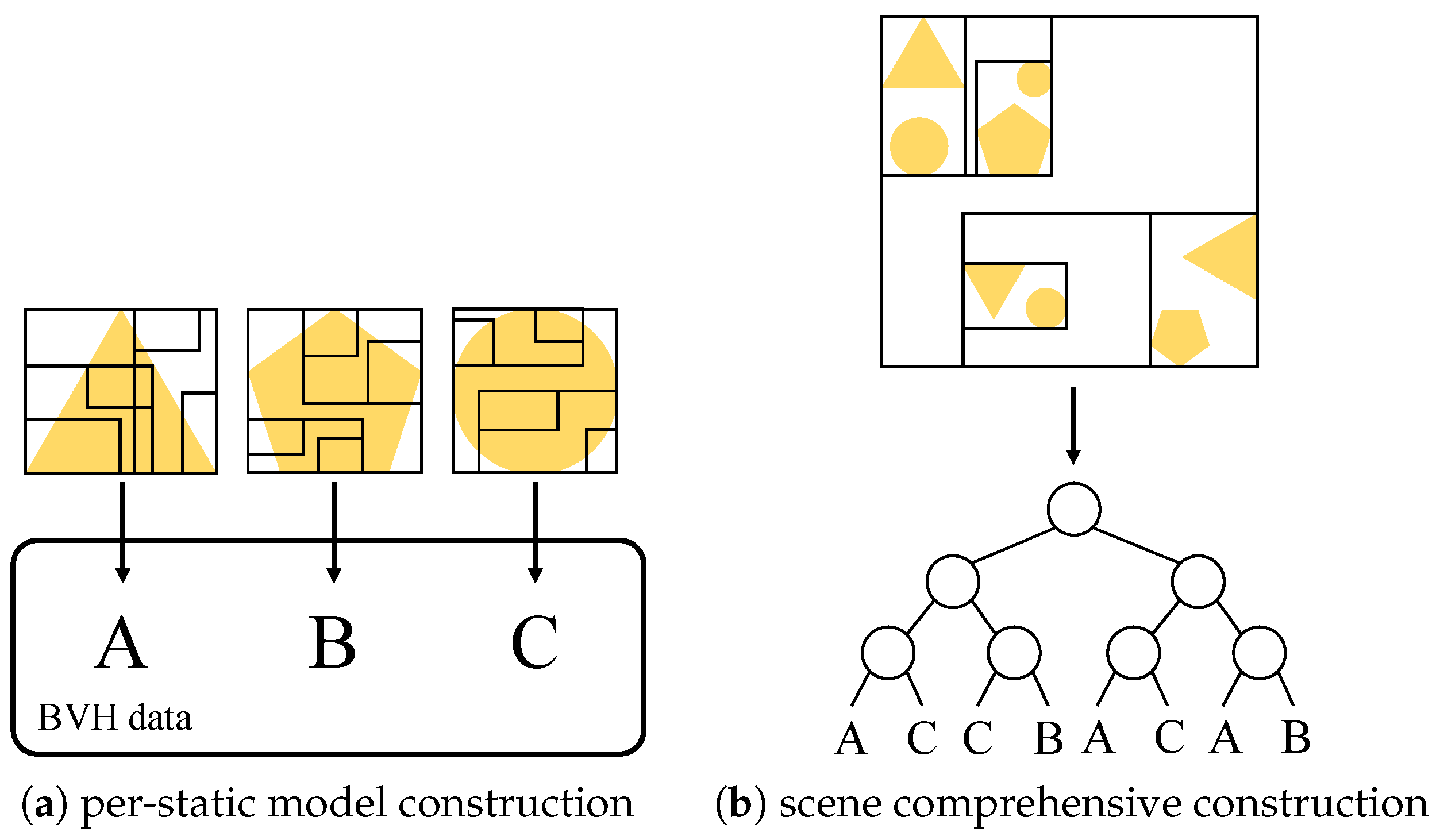
Generating a BVH tree for the entire scene is still a hard work if there are millions of primitives to render. We might have scenes with many duplicate models such as trees in the forest or houses in the town. To reduce such overhead, we generate two types of BVH trees: per-static model construction and scene comprehensive construction.
The former one, performed before the rendering loop, creates an unmodifiable object space BVH tree
per model. Its leaf nodes contain the pointer to the graphics primitives based on
non-animated model files, as shown in
Figure 9a. These per-static models act as the object pool, for duplicated static objects.
The latter performs the world space BVH tree building, addressing all the objects inside the scene with the model pointers. Unlike the static model ones, this tree has the pointer to the corresponding pre-processed model and the corresponding transformation matrix to save both space and time for the rendering.
The per-static individual model BVH trees are pre-processed and stored in a 2D image array, and the scene comprehensive tree references them at the leaf nodes. To handle the moving and/or deformable objects, the scene comprehensive tree is reconstructed every time at the beginning of the rendering loop. Since we can enjoy the time-coherency of the scenes, we can partially update the scene comprehensive tree, with respect to the moving and/or deformable objects.
3.3. Ray Reflection Calculation
The
light transport calculation is another important point of the ray-tracing method, as the ray reflection calculation step [
27,
28]. Many illumination calculation methods are available, starting from physically correct
BRDF (bidirectional reflectance distribution function) and
BSDF (bidirectional scattering distribution function) formula to diverse artistic approaches including cell-shading and more.
We opted for one of the most efficient illumination methods:
where
is the illumination of the current ray
R and its hit surface
S. Upon hit, the surface’s light emittance
and attenuation
is calculated into the traced light color. After the intersection, a new ray
reflected from the surface
S and its new hit surface
is recursively attained to trace the next ray illumination
.
To overcome the high computation burden of the ray-tracing, we adopted Boughida’s
upsampling method [
31]. The main idea is to improve performance by reducing the number of pixels to compute.
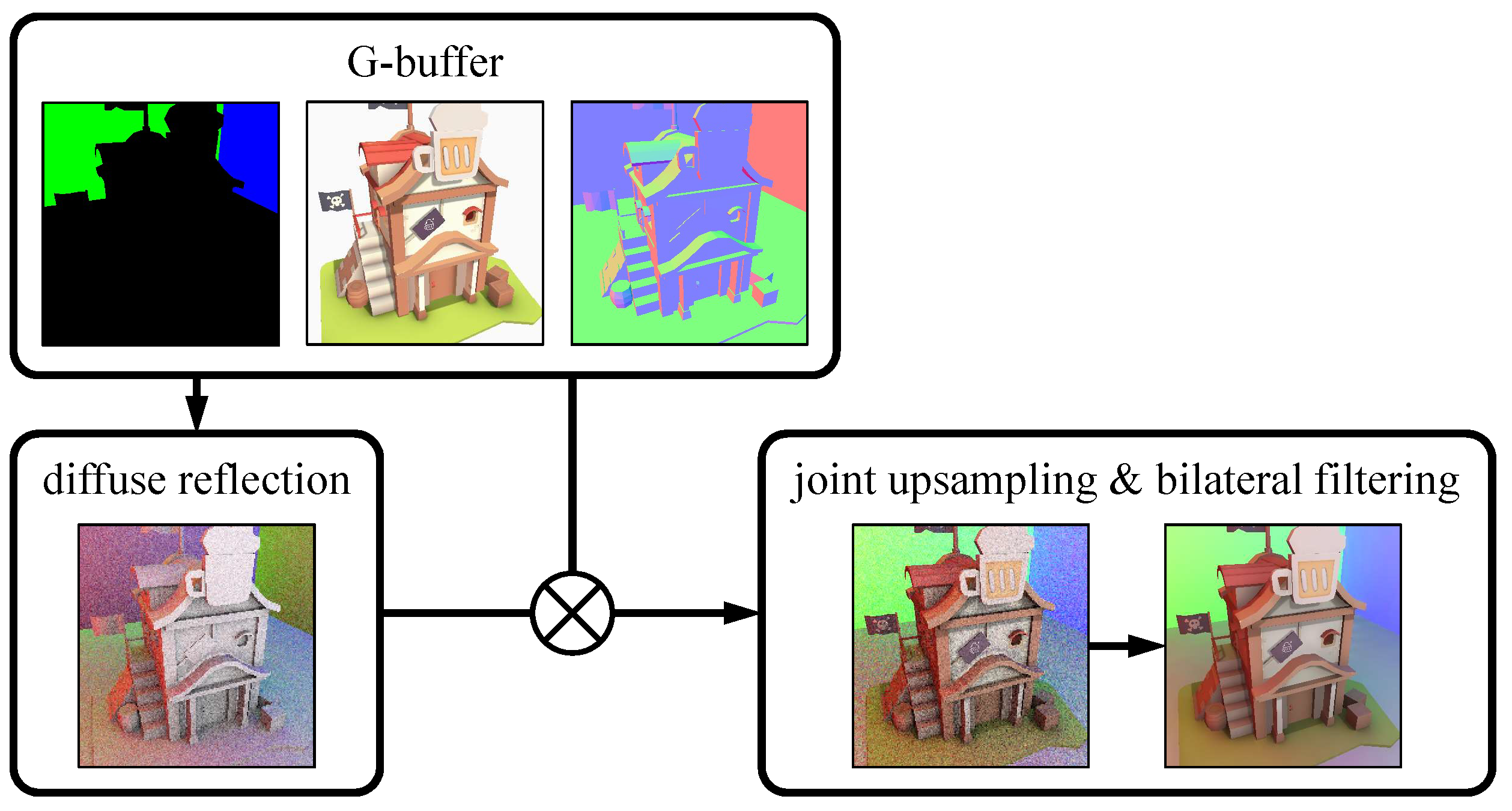
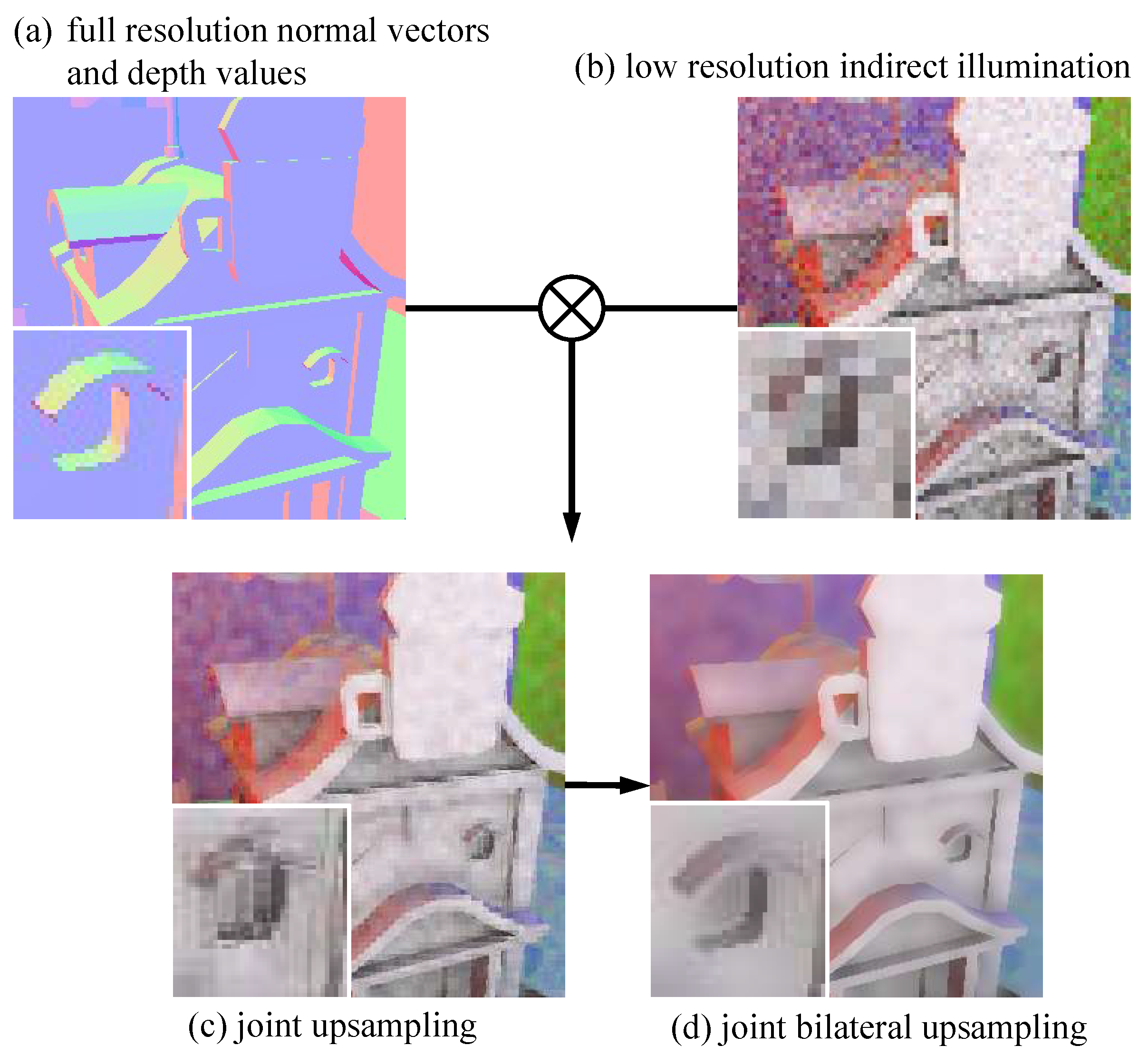
Figure 10 depicts the detail of our rendering process. We first generate the full resolution
G-buffer. The
G-buffer is a collection of all lighting-relevant textures produced to compose the final lighting pass, which is an essential step for all deferred rendering pipelines [
35,
36]. The
G-buffer includes normal vectors, depth values, and material information of the rendered image. Material data carries its surface image, roughness, and emittance. These textures can be generated through a conventional rasterization pipeline since it does not involve indirect lighting. In this work, we decided to use the compute shader-based ray casting for efficiency. We then compute the ray-traced indirect illumination in a half-resolution and upsample it back to the full resolution based on these pre-generated
G-buffer images.
We used edge-preserving
joint bilateral upsampling to avoid the flaws of fuzzy and noisy upsampling [
37,
38,
39]. We upsample the low-resolution image with the help of full-resolution normal vector and depth value information, preserving the notable edges.
Figure 11 depicts the difference between these methods.
Joint bilateral upsampling is one derivation of the
bilateral filtering method, utilizing both spatial and range filter kernel [
40,
41]. The final color composition of the pixel
at the pixel position
p in the spatial kernel
can be denoted as below:
where
is the normalization factor and
f,
g is the spatial and range filter kernel, respectively. Unlike the conventional bilateral filter, the joint bilateral upsampling uses the guidance image
G to evaluate the range factor, which is normal vector and depth value images in our case.
The spatial kernel
f is a
truncated Gaussian function and is pre-computed before the run-time usage:
where
s is the kernel size. The range kernel
g is the edge-preserving factor evaluated by the
G-buffer normal vector
n and depth value
z:
For efficient computation, we filter the row and column separately to minimize the execution time [
42,
43]. The per- pixel
n by
n kernel operation is reduced down from
to
with a little loss of filtering quality.
4. Implementation Results
Our ray-tracing engine runs on Windows 10 and is based on the C++ programming language with Visual Studio 2019 development environment. The
OpenGL graphics library [
44,
45] has opted for more elegant codes. The rendering environment is Nvidia GeForce GTX 1070 graphics card and Intel Core i7-6700K 4.00 GHz CPU.
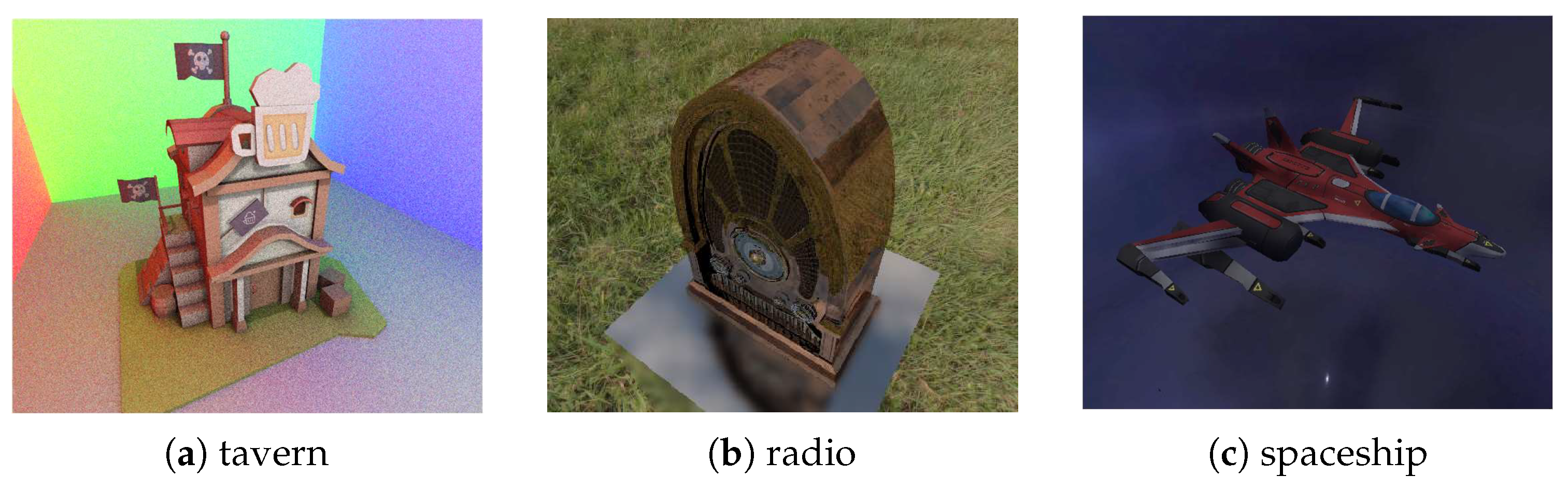
To analyze our implementation, we used three different animation scenes for the test cases: tavern, radio, and spaceship, as shown in
Figure 12. As presented in
Figure 5 and
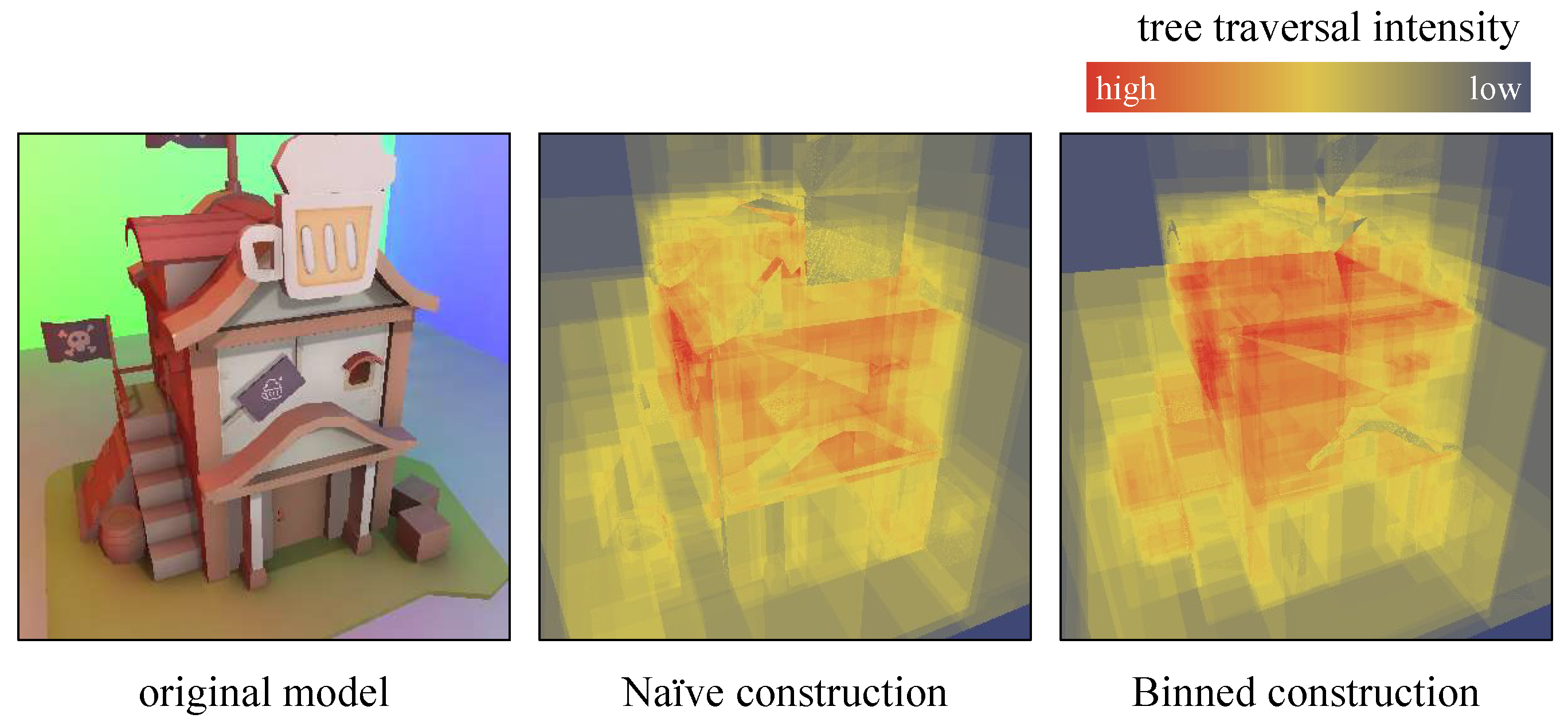
Section 3.1, our implementation starts from constructing BVH trees, for overall speed-ups. The heat map in
Figure 13 proves that the binned BVH tree structure is consistent to the original tree, which was constructed without accelerated binning techniques.
Table 1 is the performance result of the tree construction with and without
primitive binning. Results are evaluated by averaging 100 tests per model.
Table 1 shows that the binned construction is 6.631 to 16.391 times accelerated. Note that this result is only for the BVH tree construction. We should include the reflection calculation steps.
We were able to achieve modest interactive ray traced illumination with the
OpenGL compute shader, as shown in
Figure 14. The
roped BVH acceleration structure and the
upsampling technique enabled us to boost rendering performance. All scenes were rendered with 2 ray bounce limit and 100 sampling in its resolution. Note that the
ray bounce count and the
ray sampling count are the important control factors for the speed of the overall ray-tracing process. With our current hardware configuration, 2 ray bounces and 100 samplings per pixel are the limits for real-time processing.
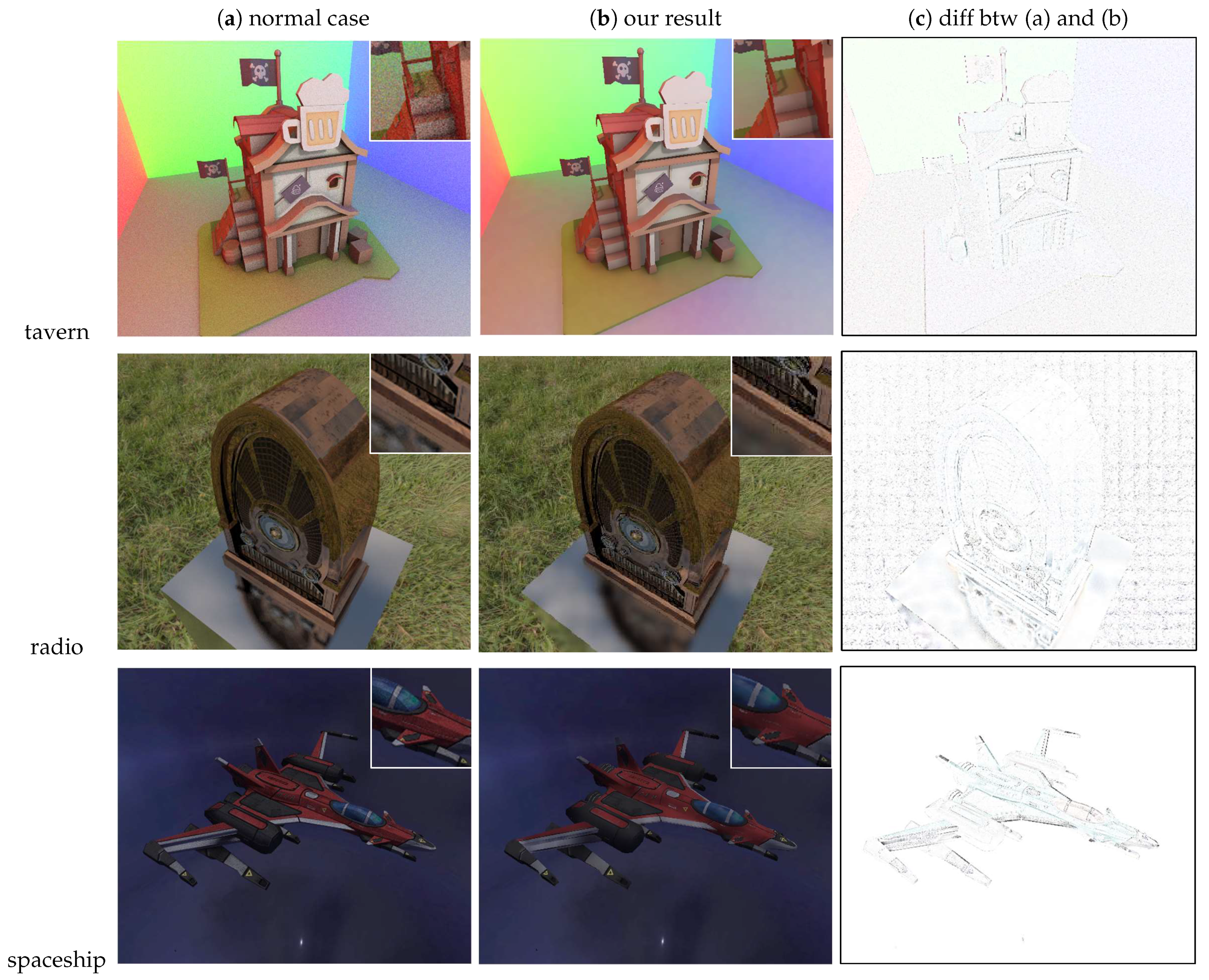
Figure 14 and
Table 2 shows the rendering result and performance of our experimental scenes.
Figure 14a shows the normal ray-traced images, without roped BVH acceleration and upsampling techniques.
Figure 14b represents our ray-traced results with all acceleration techniques are applied.
Figure 14c represents the pixel-by-pixel differences between
Figure 14a,b.
The rendering performances are shown in
Table 2. The final acceleration ratio shows that our final results are accelerated at least 2.478 to 13.618 times (maximum). The pixel-by-pixel error measures are shown in
Table 3. We denoted the errors as percent values with respect to the pixel value ranges. Since we use 256-levels for each color channels, the 50% error means 128 level differences in its absolute pixel values.
As shown in
Table 2, the error values show the mean values (
) from 0.215% to 0.854%, and standard deviations (
) from 0.680% to 0.990%, as their statistical values. Assuming the normal distributions, we can expect that more than 95% of the pixel-by-pixel errors are less than the value of
, or 1.977%–2.767%. Finally, we can expect that almost pixel-by-pixel errors are bound less than 3% of the actual pixel values.
In the case of minimum and maximum error values, we have some outliers, unfortunately.
Table 2 shows that at most 77% error was found, as one of the worst cases. Fortunately, they are very restricted cases to the sharp edge areas, due to the limitations of the joint bilateral upsampling. At the edge boundaries, the joint bilateral upsampling cannot avoid to fail the accurate ray-object intersections and also ray-reflection calculations. These artifacts are drawbacks of our acceleration scheme, and will be investigated in the future.
5. Conclusions and Future Work
In this paper, we present the overall details of our real-time ray-traced rendering engine. To achieve the real-time ray-traced rendering, we applied a set of acceleration techniques, including the bounding volume hierarchy, its roped representation, joint up-sampling, and bilateral filtering. Additionally, for more speed-ups, we implemented these features on the GPU compute shaders. Finally, we get 2.5–13.6 times accelerations, and real-time rendering, for all of our test cases.
Actually, we now achieved a ray-traced rendering framework, and we can apply much more experimental works. For example, since we used the shader programs to achieve the real-time ray-tracing, we can simultaneously apply some shader-based special effects, including cartoon rendering and high-dynamic range rendering. Various experimental combinations of ray-tracing frameworks and shader-based rendering techniques can be our future works.
For the implementation point of view, we can achieve more speed-ups through concentrating on the faster BVH construction, and/or tree traversal. Reducing the pixel-by-pixel artifacts can also be investigated in near future.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}