
Check-Valve Design in Enhancing Aerodynamic Performance of Flapping Wings

 ,
,  , , ,
, , , 
Abstract
:1. Introduction
2. Methodology
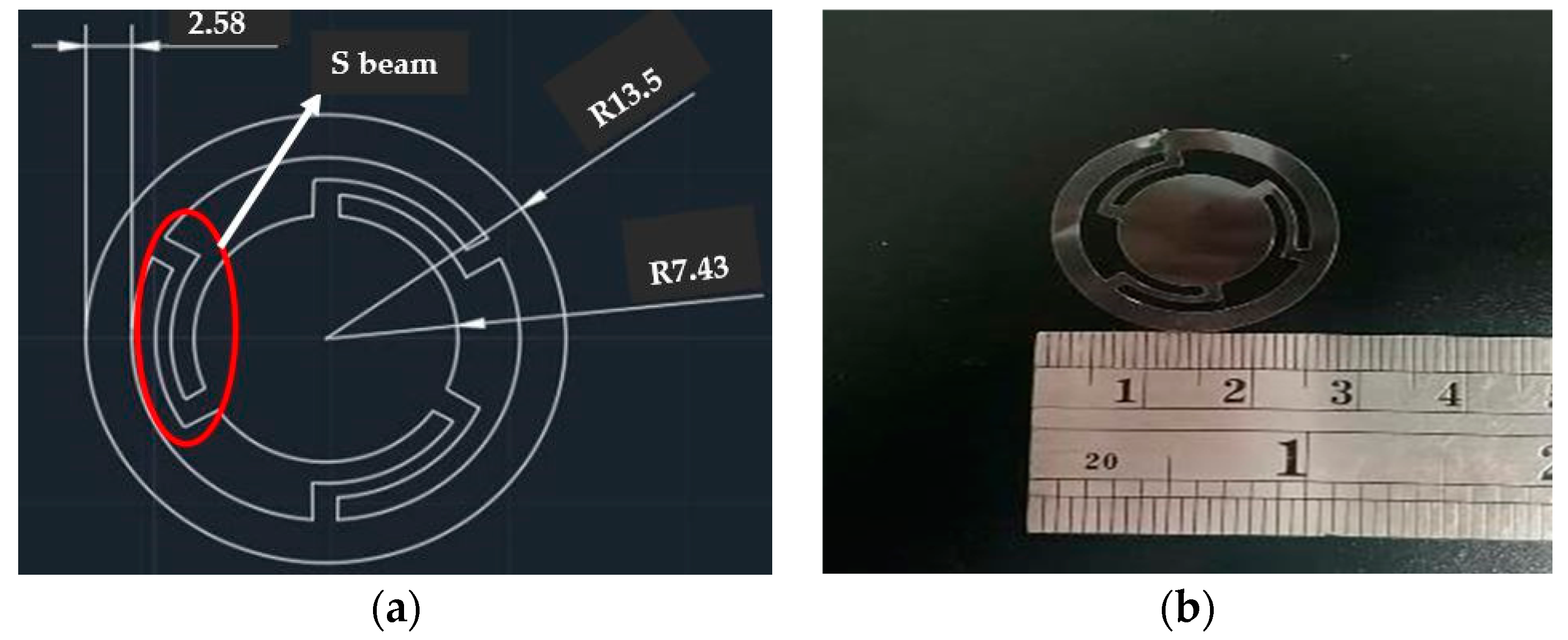
2.1. Design of Check-Valve
2.2. Frequency Response
2.3. Integration of Check-Valve on the Flapping Wing
2.4. High Speed Photography
2.5. Wind Tunnel Experiment
- Wind speed: 0.5–3.0 m/s;
- Driving voltage: 3.0 V, 3.4 V and 3.7 V;
- Inclined angle of the FWMAV: 20°, 30°, 50°, 60° and 70°.
3. Results
3.1. Instantaneous Lift Wave Forms and the Averaged Aerodynamic Forces
3.2. Identification of Cruising Condition
- Identify the cruising speed by observing the intercepted point with zero net thrust on the net thrust diagram (marked with ★ or ★);
- Find the corresponding cruising lift from the identified condition on the lift diagram (marked with ★ or ★).
- Improper trend: In the cases of 3.4 V-30° and V-60°, and 3.7 V-50° for the check-valve, the net thrust increases with the increase in wind speed. However, this trend is irrational because, in general, drag increases with wind speed. Hence, the cruising condition is not found.
- All negative (−) net thrust: In the case of 3.0 V-70° without a check-valve, the net thrust data are all negative. Therefore, neither the intercept of zero net thrust nor the cruising condition can be found. A similar issue also occurs in the case of 3.4 V-20° with the check-valve.
- All positive (+) net thrust: In the case of 3.4 V-70° with a check-valve, the net thrust data are all positive. Therefore, neither the intercept of zero net thrust nor the cruising condition can be found.
4. Discussion
- It is evident from the lift waveform that the lift during upstroke presents a positive small value, rather than a negative small value, as shown in Figure 7(a2,b2,c2).
- With massive wind tunnel data points and test conditions, only a few cruising conditions have better lift gain performance, as shown in Table 3.
- The small size of the check-valve may not be suitable for smaller flapping wings, as shown in Figure 4a.
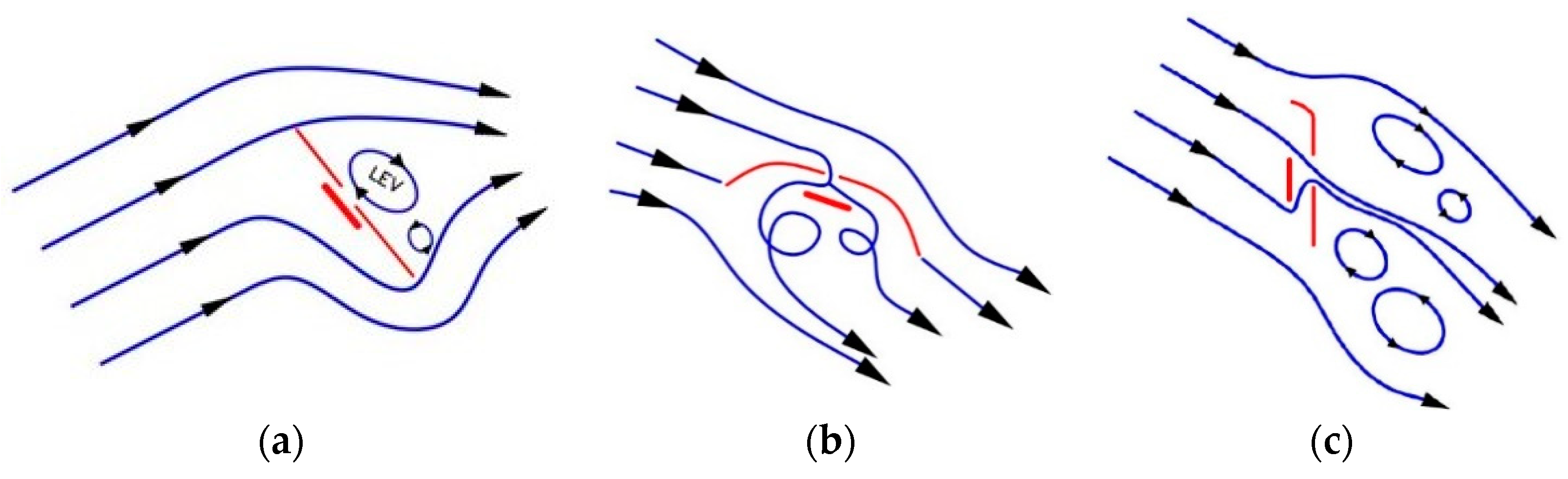
4.1. The Driving Force for Opening the Check-Valve
4.2. The Stability and Applicable Range of the Operation of the Check-Valve
5. Conclusions
- The check-valve design with three S-beams, and its size, play important roles in controlling lift enhancement. The single-pair design of check-valves achieved superior performance than 12-valves case.
- Modal analysis predicted the natural frequency of the check-valve with a disc-cap radius of 7.43 mm as 18.90 Hz, which is larger than the flapping frequency 11–14 Hz. The obvious deformation of 7.39 mm, comparable to the disc-cap radius, is verified by high-speed photography.
- The cruising conditions of the flapping wing are identified from the generated massive wind tunnel data through observing the zero-net thrusts. During the best cruising conditions, the flapping wing with check-valves generated 27%~68% higher lift than the membrane wing without the check-valve. A high-lift maneuver was also performed due to large lift enhancement by the check-valves.
- In summary, the results of this study show that the lift enhancement through the incorporation of check-valve is effective for bird-like MAVs with a wingspan of about 20 cm, rather than insect-like MAVs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Narásek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.W.; de Croon, G.C.H.E. A Tailless Aerial Robotic Flapper Reveals that Flies Use Torque Coupling in Rapid Baked Turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [Green Version]
- Phan, H.V.; Park, H.C. Mechanisms of Collision Recovery in Flying Beetles and Flapping-Wing Robots. Science 2020, 370, 1214–1219. [Google Scholar] [CrossRef]
- Yang, L.J.; Kao, A.F.; Hsu, C.K. Wing Stiffness on Light Flapping Micro Aerial Vehicles. J. Aircr. 2012, 49, 423–431. [Google Scholar] [CrossRef]
- Yang, L.J.; Balasubramanian, E.; Waikhom, R. Inertial Effect on the Time-Averaged Lift of Flapping Wings. J. Appl. Sci. Eng. 2020, 23, 357–359. [Google Scholar]
- He, W.; Meng, T.; He, X.; Sun, C. Iterative Learning Control for a Flapping Wing Micro Aerial Vehicle under Distributed Disturbances. IEEE Trans. Cybern. 2018, 49, 1524–1535. [Google Scholar] [CrossRef]
- Bronz, M.; Moschetta, J.M.; Brisset, P.; Gorraz, M. Towards a Long Endurance MAV. Int. J. Micro Air Veh. 2009, 1, 241–254. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.V.; Truong, Q.T.; Park, H.C.; Goo, N.S.; Byun, D. Measurement of Force Produced by an Insect-Mimicking Flapping-Wing System. J. Bionic Eng. 2010, 7, S94–S102. [Google Scholar] [CrossRef]
- Ashraf, M.A.; Young, J.; Lai, J.C. Reynolds Number, Thickness, and Camber Effects on Flapping Airfoil Propulsion. J. Fluids Struct. 2011, 27, 145–160. [Google Scholar] [CrossRef]
- Yang, L.J.; Kapri, N.; Waikhom, R.; Unnam, N.K. Fabrication, Aerodynamic Measurement and Performance Evaluation of Corrugated Flapping Wings. J. Aeronaut. Astronaut. Aviat. 2021, 53, 83–94. [Google Scholar]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Tailless Flapping Wing Propulsion and Control Development for the Nano HummingBird Micro Air Vehicle. In Proceedings of the American Helicopter Society Future Vertical Aircraft Design Conference, San Francisco, CA, USA, 18–20 January 2012. [Google Scholar]
- Dickinson, M.D.; Lehmann, F.O.; Sane, S.P. Wing Rotation and the Aerodynamic Basis of Insect Flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef]
- Ismail, N.I.; Zulkifli, A.H.; Abdullah, M.Z.; Basri, M.H.; Abdullah, N.S. Optimization of Aerodynamic Efficiency for Twist Morphing MAV Wing. Chin. J. Aeronaut. 2014, 27, 475–487. [Google Scholar] [CrossRef] [Green Version]
- Chang, E.; Matloff, L.Y.; Stowers, A.K.; Lentink, D. Soft Biohybrid Morphing Wings with Feathers Underactuated by Wrist and Finger Motion. Sci. Robot. 2020, 5, eaay1246. [Google Scholar] [CrossRef]
- Matloff, L.Y.; Chang, E.; Feo, T.J.; Jeffries, L.; Stowers, A.K.; Thomson, C.; Lentink, D. How Flight Feathers Stick together to Form a Continuous Morphing Wing. Science 2020, 367, 293–297. [Google Scholar] [CrossRef]
- Muhammad, A.; Nguyen, Q.V.; Park, H.C.; Hwang, D.Y.; Byun, D. Improvement of artificial foldable wing models by mimicking the unfolding/folding mechanism of a beetle hind wing. J. Bionic Eng. 2010, 7, 134–141. [Google Scholar] [CrossRef]
- Yang, L.J.; Suseendar, M. Acoustic Comparison of PET and Latex Wings for Flapping Micro-Air-Vehicles. In Proceedings of the 10th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (IEEE-NEMS), Xi’an, China, 7–11 April 2015; pp. 172–174. [Google Scholar]
- Wei, G.; Bi, Y.; Li, X.; Xu, D.; Xu, W.; Yang, L.J.; Qin, Y.; Guo, H.; Zhao, X.; Chen, X.; et al. Self-Powered Hybrid Flexible Nanogenerator and Its Application in Bionic Micro Aerial Vehicles. Nano Energy 2018, 54, 10–16. [Google Scholar] [CrossRef]
- Combes, S.A.; Daniel, T.L. Flexural Stiffness in Insect Wings I. Scaling and the Influence of Wing Venation. J. Exp. Biol. 2003, 206, 2979–2987. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Song, B. Experimental Investigation of Aerodynamics of Feather-Covered Flapping Wing. Appl. Bionics Biomech. 2017, 10, 3019640. [Google Scholar] [CrossRef]
- Bachmann, T.; Emmerlich, J.; Baumgartner, W.; Schneider, J.M.; Wagner, H. Flexural Stiffness of Feather Shafts: Geometry Rules over Material Properties. J. Exp. Biol. 2012, 215, 405–415. [Google Scholar] [CrossRef] [Green Version]
- Klaassen van Oorschot, B.; Choroszucha, R.; Tobalske, B. Passive Aeroelastic Deflection of Avian Primary Feathers. Bioinspir. Biomim. 2020, 15, 056008. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Yu, S.C.M. Aerodynamic Characteristics of the Ventilated Design for Flapping Wing Micro Air Vehicle. Sci. World J. 2014, 2014, 410749. [Google Scholar] [CrossRef] [Green Version]
- Pornsin-Sirirak, N.; Liger, M.; Tai, Y.C.; Ho, S.; Ho, C.M. Flexible Parylene-Valved Skin for Adaptive Flow Control. In Proceedings of the Technical Digest MEMS 2002 IEEE International Conference, Fifteenth IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, USA, 24 January 2002; Cat. No. 02CH37266. pp. 101–104. [Google Scholar]
- Nickols, F.; Lin, Y.J. Feathered Tail and Pygostyle for the Flying Control of a Bio-Mimicking Eagle Bird Robot. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 556–561. [Google Scholar] [CrossRef]
- Samuel, D.; Sebastien, G.; Alexandre, B.; Eric, C.; Daniel, C. Bond Graph Model of a Flapping Wing Micro Air Vehicle. In Proceedings of the 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), Senigallia, Italy, 10–12 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Chand, A.N.; Kawanishi, M.; Narikiyo, T. Design Analysis Modelling and Experimental Validation of a Bird-like Flapping-Wing Flying Robot. In Proceedings of the International Micro Aerial Vehicles Conference and Competition (IMAV 2014), Delf, The Netherlands, 12–15 August 2014; pp. 12–15. [Google Scholar]
- Available online: https://www.festo.com/group/en/cms/13787.htm (accessed on 3 February 2021).
- Yang, L.J.; Hsu, C.K.; Han, H.C.; Miao, J.M. Light Flapping Micro Aerial Vehicle Using Electrical-Discharge Wire-Cutting Technique. J. Aircr. 2009, 46, 1866–1874. [Google Scholar] [CrossRef]
- Hsiao, F.Y.; Yang, L.J.; Lin, S.H.; Chen, C.L.; Shen, J.F. Autopilots for Ultra-Lightweight Robotic Birds-Automatic Altitude Control and System Integration of a Sub-10 g Weight Flapping-Wing Micro Air Vehicle. IEEE Control Syst. Mag. 2012, 32, 35–48. [Google Scholar]
- Yang, L.J.; Esakki, B.; Chandrasekhar, U.; Hung, K.C.; Cheng, C.M. Practical Flapping Mechanisms for 20 cm-Span Micro Air Vehicles. Int. J. Micro Air Veh. 2015, 7, 181–202. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.C.-H.; Yu, F.; Tai, Y.-C. Cracking Pressure Control of Parylene Checkvalve Using Slanted Tensile Tethers. In Proceedings of the IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Wanchai, Hong Kong, China, 24–28 January 2010. [Google Scholar] [CrossRef] [Green Version]
- Rhie, C.M.; Chow, W.L. Numerical Study of the Turbulent Flow Past an Airfoil with Trailing Edge Separation. AIAA J. 1983, 21, 1525–1532. [Google Scholar] [CrossRef]
- Gill, F.B. Ornithology, 3rd ed.; Macmillan, Academy of Natural Sciences: Philadelphia, PA, USA, 2007. [Google Scholar]
- Ogata, K. Modern Control Engineering, 5th ed.; Pearson, Prentice Hall: Upper Saddle River, NJ, USA, 1997; p. 906. [Google Scholar]
- Yang, L.J. The Micro-Air-Vehicle Golden Snitch and Its Figure-of-8 Flapping. J. Appl. Sci. Eng. 2012, 15, 197–212. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value | Unit |
|---|---|---|
| Density | 1250 | kg/m3 |
| Young’s modulus | 2000 | MPa |
| Poisson’s ratio | 0.37 | |
| Tensile strength | 55 | MPa |
| Type of Wings with Disc-Cap Radii (mm) | Total No. of Check-Valves on Wing (and Wing Mass) | First Natural Frequency of Check-Valve (Hz) | Maximum Flapping Frequency |
|---|---|---|---|
| Plain wing | 0 (0.62 g) | - | 18 |
| 4.95 | 12 (1.2 g) | 41.78 | 6 |
| 7.43 | 2 (0.68 g) | 18.90 | 14 |
| Driving Voltage (V) | Inclined Angle of the Fuselage (°) | Cruising Speed (m/s) | Cruising Lift (gf) | Check-Valves? | Remark |
|---|---|---|---|---|---|
| 3 | 20 | 1.6 | 4.2 | No | Cannot fly |
| 3 | 30 | 1.6 | 11 | No | |
| 3 | 50 | 0.5 | 0.3 | No | Cannot fly |
| 3 | 60 | 0.75 | 5.6 | No | Cannot fly |
| 3 | 70 | - | - | No | All “-” net thrust |
| 3.4 | 20 | 1.7 | 9.1 | No | Cannot fly |
| 3.4 | 30 | 1.79 | 9 | No | Cannot fly |
| 3.4 | 50 | 0.9 | 5.8 | No | Cannot fly |
| 3.4 | 60 | 0.6 | 3.9 | No | Cannot fly |
| 3.4 | 70 | 0.6 | 3.5 | No | Cannot fly |
| 3.7 | 20 | 1.65 | 7.8 | No | Cannot fly |
| 3.7 | 30 | 1.75 | 10.1 | No | |
| 3.7 | 50 | 0.9 | 6 | No | Cannot fly |
| 3.7 | 60 | 0.6 | 5.8 | No | Cannot fly |
| 3.7 | 70 | 0.5 | 4.1 | No | Cannot fly |
| 3 | 20 | 2.2 | 11 | Yes | |
| 3 | 30 | 1.6 | 14 | Yes | |
| 3 | 50 | 1.3 | 3 | Yes | Cannot fly |
| 3 | 60 | 1.3 | 5.1 | Yes | Cannot fly |
| 3 | 70 | 0.75 | 2 | Yes | Cannot fly |
| 3.4 | 20 | - | - | Yes | All “-” net thrust |
| 3.4 | 30 | 2.4 | 21 | Yes | Improper trend |
| 3.4 | 50 | 0.6 | 7.5 | Yes | Cannot fly |
| 3.4 | 60 | 0.85 | 11 | Yes | Improper trend |
| 3.4 | 70 | - | - | Yes | All “+” net thrust |
| 3.7 | 20 | 2.6 | 17.5 | Yes | Improper trend |
| 3.7 | 30 | 1.5 | 17 | Yes | |
| 3.7 | 50 | 1.5 | 19 | Yes | Improper trend |
| 3.7 | 60 | 1.2 | 17 | Yes | |
| 3.7 | 70 | 0.9 | 6 | Yes | Cannot fly |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.-J.; Waikhom, R.; Wang, W.-C.; Jabaraj Joseph, V.; Esakki, B.; Kumar Unnam, N.; Li, X.-H.; Lee, C.-Y. Check-Valve Design in Enhancing Aerodynamic Performance of Flapping Wings. Appl. Sci. 2021, 11, 3416. https://doi.org/10.3390/app11083416
Yang L-J, Waikhom R, Wang W-C, Jabaraj Joseph V, Esakki B, Kumar Unnam N, Li X-H, Lee C-Y. Check-Valve Design in Enhancing Aerodynamic Performance of Flapping Wings. Applied Sciences. 2021; 11(8):3416. https://doi.org/10.3390/app11083416
Chicago/Turabian StyleYang, Lung-Jieh, Reshmi Waikhom, Wei-Chen Wang, Vivek Jabaraj Joseph, Balasubramanian Esakki, Neethish Kumar Unnam, Xiu-Han Li, and Chi-Yuan Lee. 2021. "Check-Valve Design in Enhancing Aerodynamic Performance of Flapping Wings" Applied Sciences 11, no. 8: 3416. https://doi.org/10.3390/app11083416
APA StyleYang, L. -J., Waikhom, R., Wang, W. -C., Jabaraj Joseph, V., Esakki, B., Kumar Unnam, N., Li, X. -H., & Lee, C. -Y. (2021). Check-Valve Design in Enhancing Aerodynamic Performance of Flapping Wings. Applied Sciences, 11(8), 3416. https://doi.org/10.3390/app11083416