Numerical Investigation on the Evolution of Thin Liquid Layer and Dynamic Behavior of an Electro-Thermal Drilling Probe during Close-Contact Heat Transfer

 ,
,
Abstract
:1. Introduction
2. CFD Simulations
2.1. Governing Equations
2.2. Numerical Details
2.3. Dynamic Motion of ETDP
2.4. Validation of the Numerical Method
3. Result and Discussion
4. Conclusions
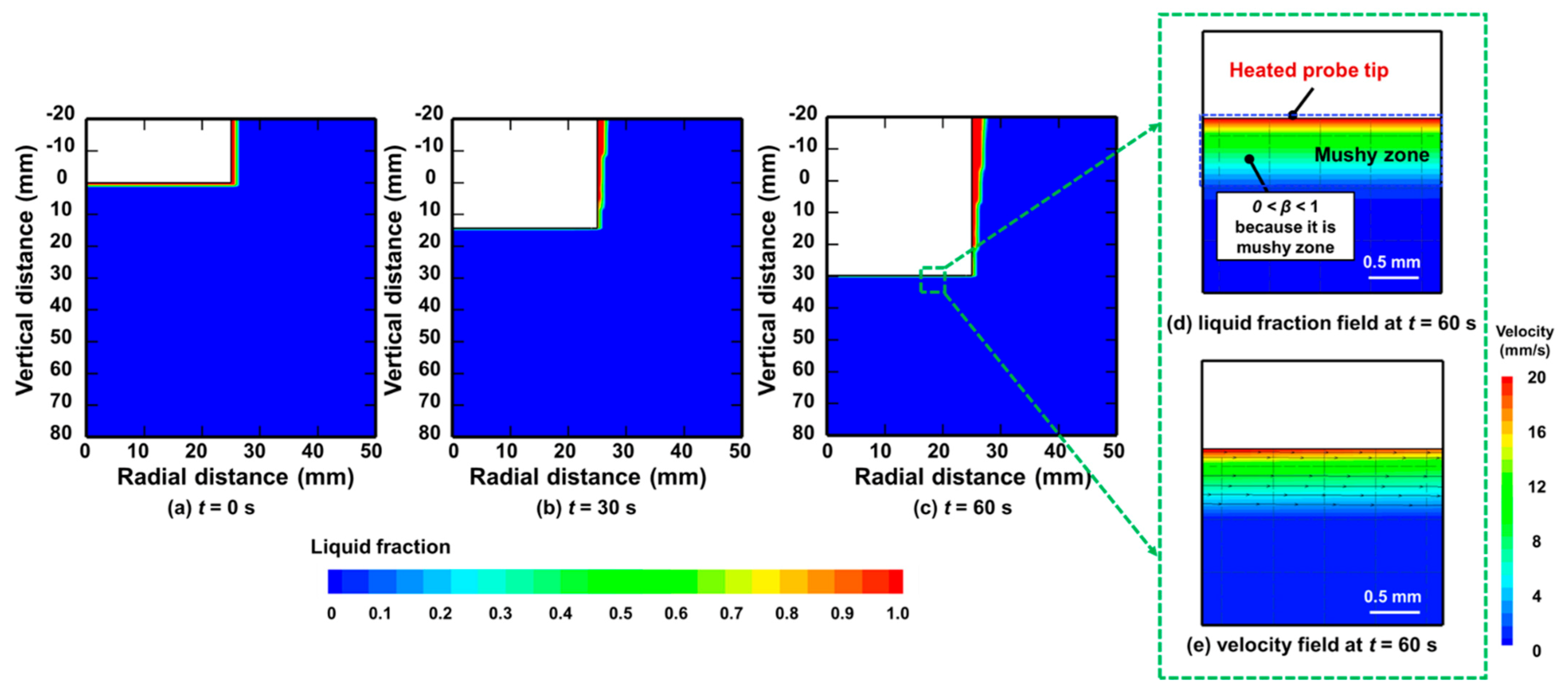
- The mushy zone, where the melting process occurs, exists near the heated probe tip, and its temperature remains at a melting temperature of 273.15 K. Although the temperature of the mushy zone has a constant value of 273.15 K, its enthalpy increases during the melting process.
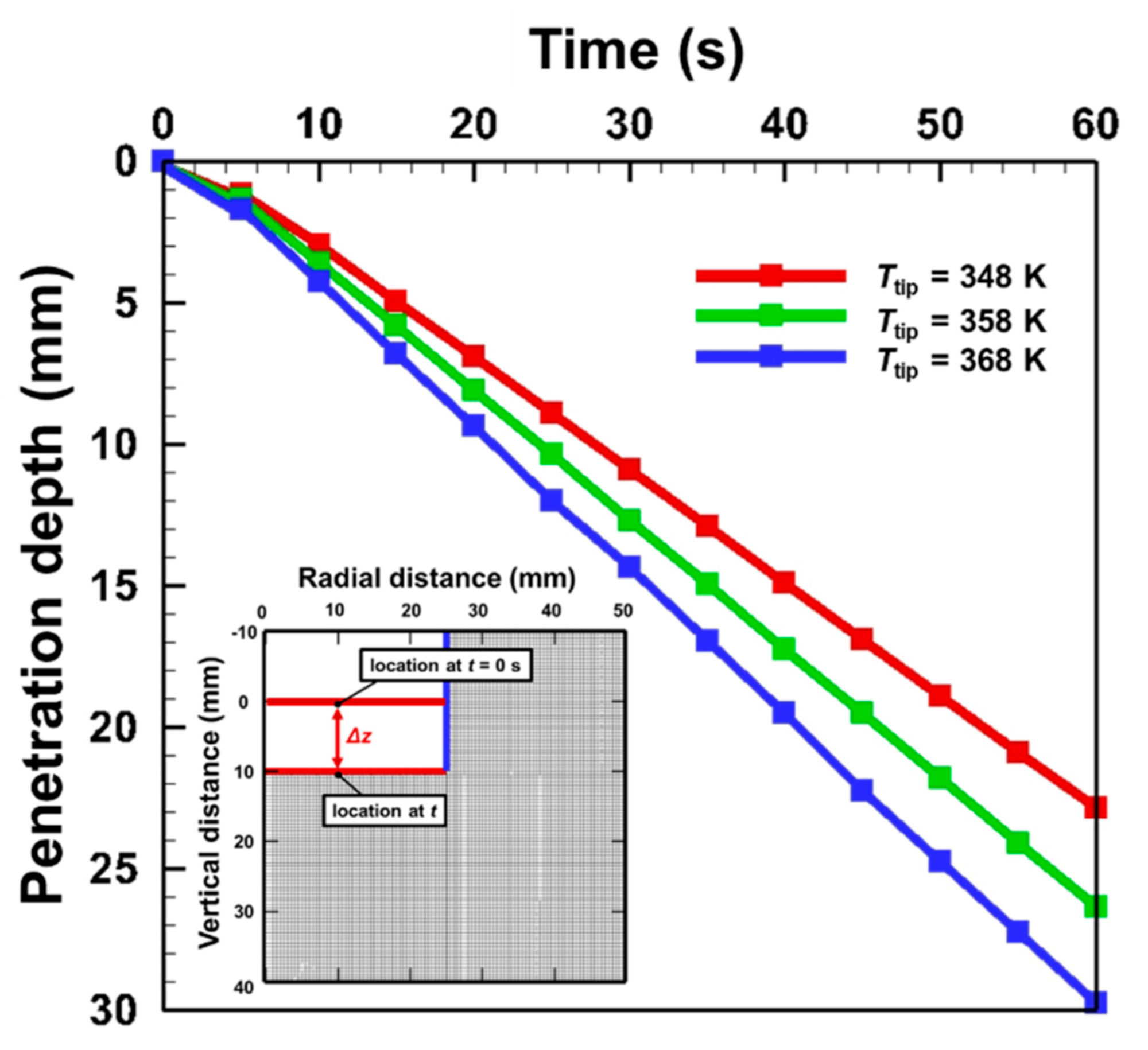
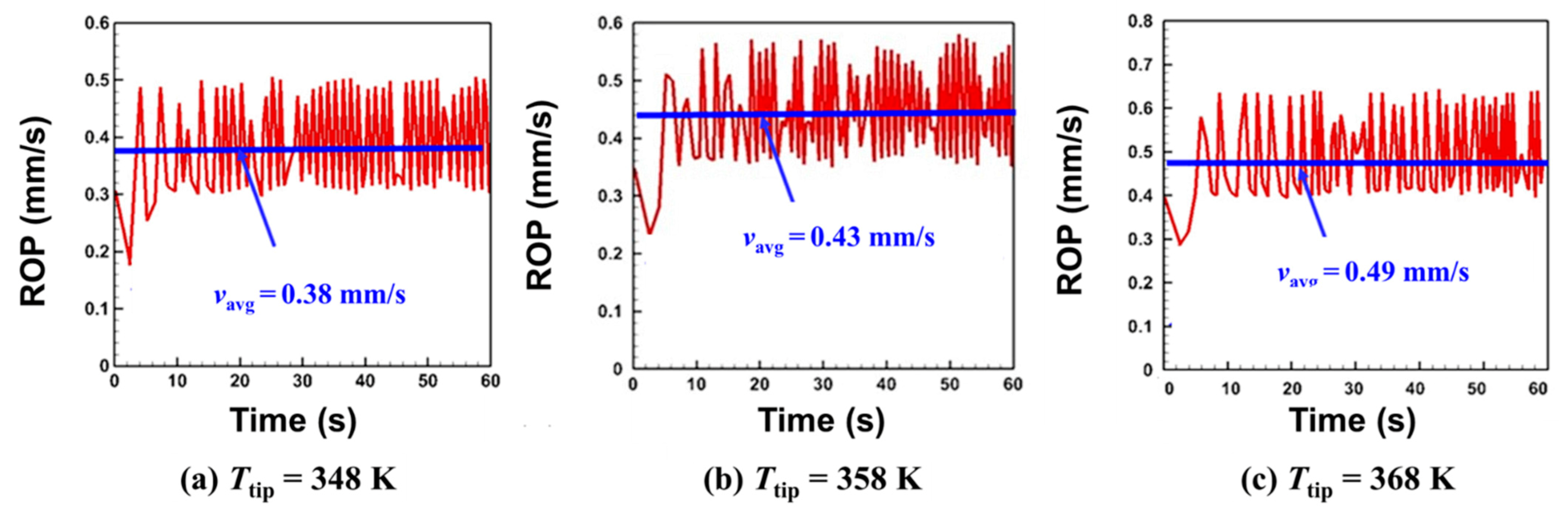
- A thin liquid layer forms during the melting process, and the electro-thermal drilling probe can penetrate the ice by pushing and squeezing the molten thin liquid layer. The penetration depth linearly increases with time, and it implies that the ROP has a nearly constant value. The time-averaged ROP increases with the temperature of the heated probe tip, and has the values of 0.38, 0.43 and 0.49 mm/s for the different heated probe tip temperatures of 348, 358 and 368 K, respectively.
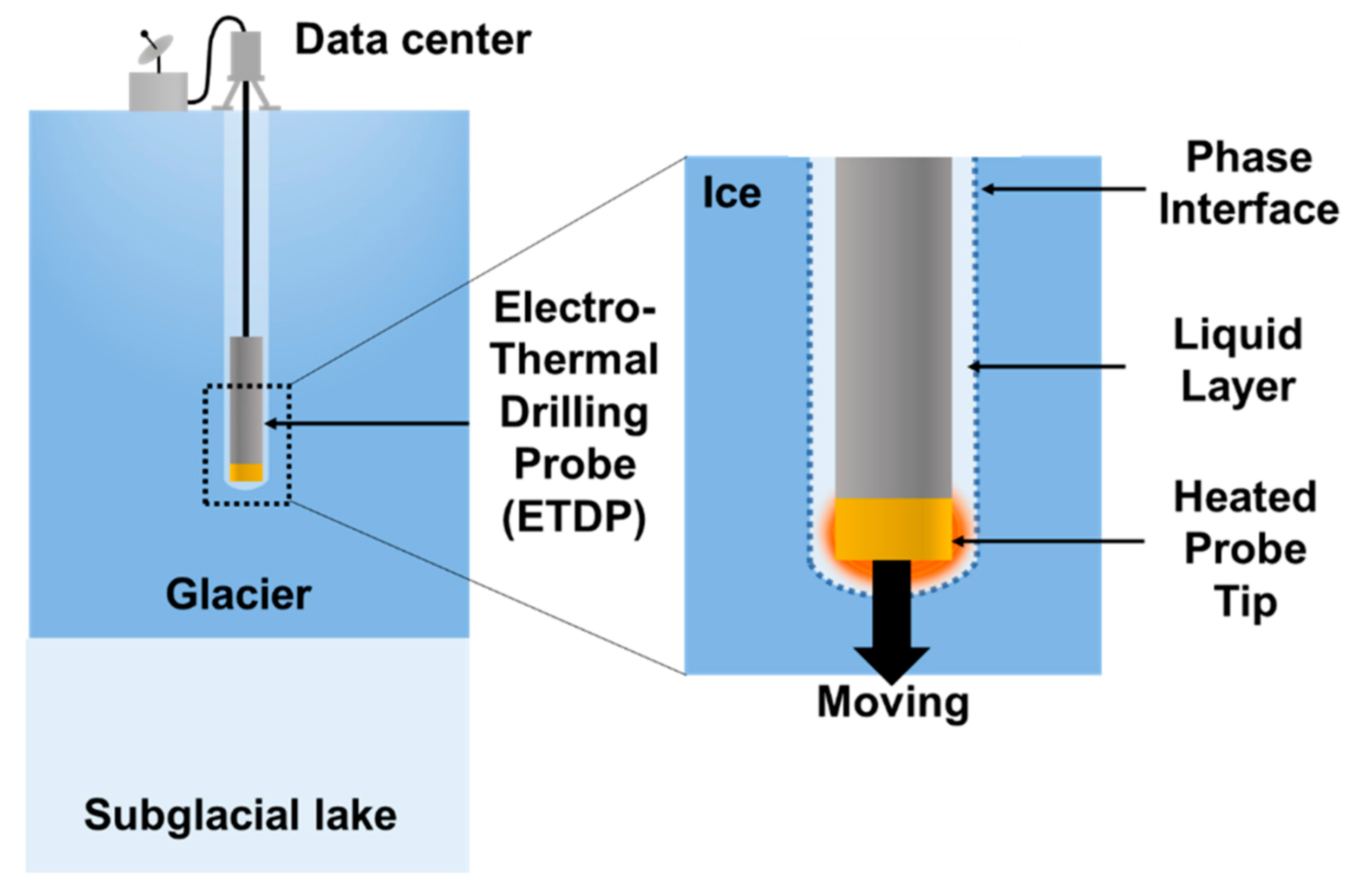
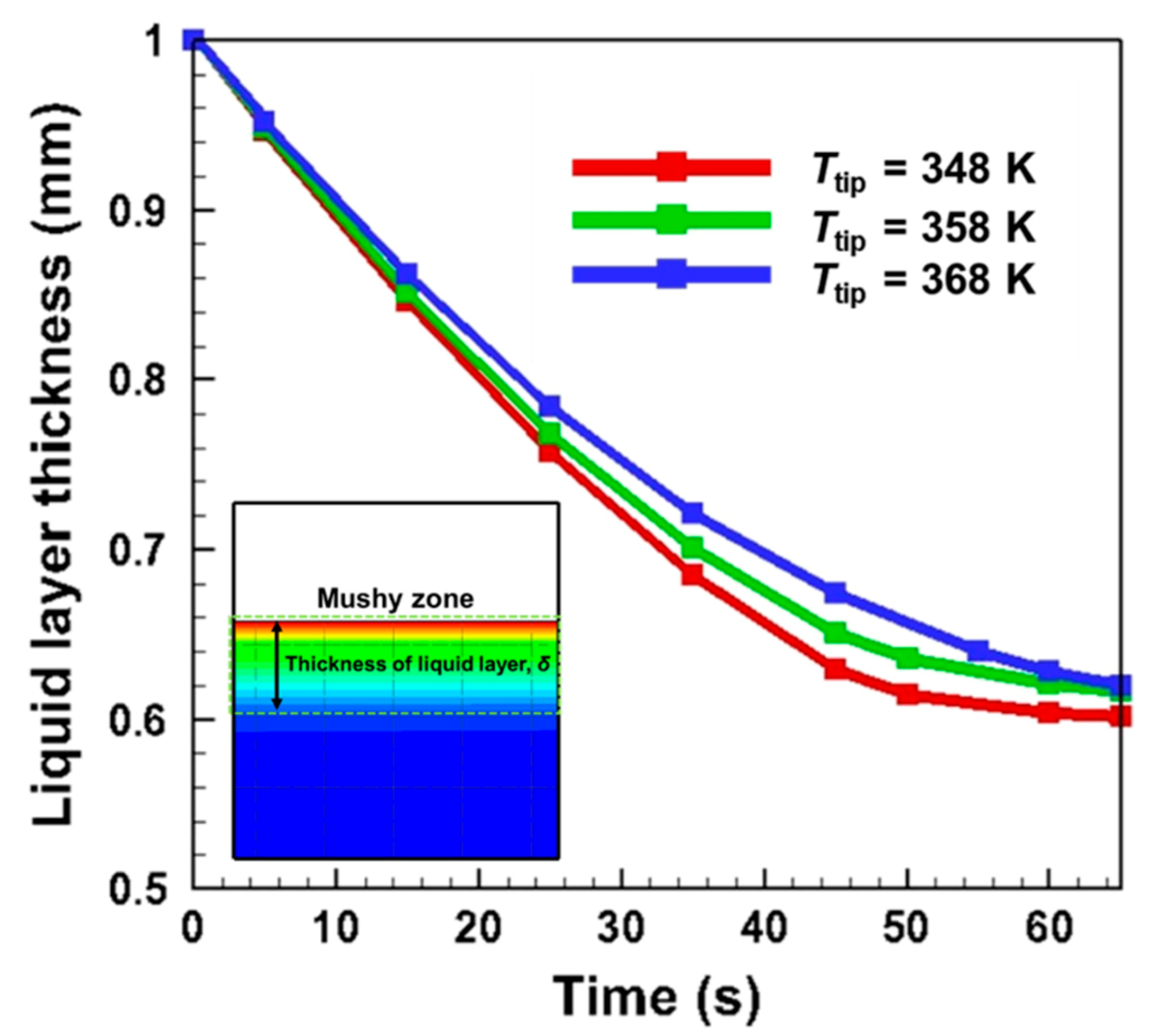
- The molten liquid layer maintains its thickness within the 1 mm around the heated probe tip. The thin liquid layer does not become thicker; instead, it stays at about 0.6 mm during the melting process. This is because the molten liquid layer is squeezed by the ETDP and pushed radially outward.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Christner, B.C.; The WISSARD Science Team; Priscu, J.C.; Achberger, A.M.; Barbante, C.; Carter, S.P.; Christianson, K.; Michaud, A.B.; Mikucki, J.A.; Mitchell, A.C.; et al. A microbial ecosystem beneath the west antarctic ice sheet. Nature 2014, 512, 310–313. [Google Scholar] [CrossRef]
- Rampelotto, P.H. Resistance of microorganisms to extreme environmental conditions and its contribution to astrobiology. Sustainability 2010, 2, 1602–1623. [Google Scholar] [CrossRef] [Green Version]
- Priscu, J.C. Geomicrobiology of subglacial ice above lake vostok, antarctica. Science 1999, 286, 2141–2144. [Google Scholar] [CrossRef] [Green Version]
- Talalay, P.G.; Zagorodnov, V.S.; Markov, A.N.; Sysoev, M.A.; Hong, J. Recoverable autonomous sonde (recas) for environmental exploration of antarctic subglacial lakes: General concept. Ann. Glaciol. 2014, 55, 23–30. [Google Scholar] [CrossRef] [Green Version]
- Cuncil, N.R. Exploration of Antarctic Subglacial Aquatic Environments: Environmental and Scientific Stewardship; National Academic Press: Washington, DC, USA, 2007. [Google Scholar]
- Kapitsa, A.P.; Ridley, J.K.; Robin, G.D.; Siegert, M.J.; Zotikov, I.A. A large deep freshwater lake beneath the ice of central east antarctica. Nature 1996, 381, 684–686. [Google Scholar] [CrossRef]
- Zimmerman, W.; Bonitz, R.; Feldman, J. Cryobot: An ice penetrating robotic vehicle for mars and europa. In Proceedings of the Aerospace Conference Proceedings, Big Sky, MT, USA, 10–17 March 2001; pp. 311–323. [Google Scholar]
- Kowalski, J.; Linder, P.; Zierke, S.; von Wulfen, B.; Clemens, J.; Konstantinidis, K.; Ameres, G.; Hoffmann, R.; Mikucki, J.; Tulaczyk, S.; et al. Navigation technology for exploration of glacier ice with maneuverable melting probes. Cold Reg. Sci. Technol. 2016, 123, 53–70. [Google Scholar] [CrossRef] [Green Version]
- Aamot, H.W.C. Development of a vertically stabilized thermal probe for studies in and below ice sheets. J. Eng. Ind. 1970, 92, 263–268. [Google Scholar] [CrossRef]
- Schuller, K.; Kowalski, J.; Raback, P. Curvilinear melting-a preliminary experimental and numerical study. Int. J. Heat Mass Transf. 2016, 92, 884–892. [Google Scholar] [CrossRef]
- Alemany, O.; Chappellaz, J.; Triest, J.; Calzas, M.; Cattani, O.; Chemin, J.; Desbois, Q.; Desbois, T.; Duphil, R.; Falourd, S.; et al. The subglacior drilling probe: Concept and design. Ann. Glaciol. 2014, 55, 233–242. [Google Scholar] [CrossRef] [Green Version]
- Shreve, R.L. Theory of performance of isothermal solid-nose hotpoints boring in temperate ice. J. Glaciol. 1962, 4, 151–160. [Google Scholar] [CrossRef] [Green Version]
- Talalay, P.G.; Li, Y.Z.; Sysoev, M.A.; Hong, J.L.; Li, X.; Fan, X.P. Thermal tips for ice hot-point drilling: Experiments and preliminary thermal modeling. Cold Reg. Sci. Technol. 2019, 160, 97–109. [Google Scholar] [CrossRef]
- Suto, Y.; Saito, S.; Osada, K.-I.; Takahashi, H.; Motoyama, H.; Fujii, Y.; Tanaka, Y. Laboratory experiments and thermal calculations for the development of a next-generation glacier-ice exploration system: Development of an electro-thermal drilling device. Polar Sci. 2008, 2, 15–26. [Google Scholar] [CrossRef] [Green Version]
- Treffer, M.; Komle, N.I.; Kargl, G.; Kaufmann, E.; Ulamec, S.; Biele, J.; Ivanov, A.; Funke, O. Preliminary studies concerning subsurface probes for the exploration of icy planetary bodies. Planet. Space Sci. 2006, 54, 621–634. [Google Scholar] [CrossRef]
- Garcia-Diaz, M.; Pereiras, B.; Miguel-Gonzalez, C.; Rodriguez, L.; Fernandez-Oro, J. CFD analysis of the performance of a double decker turbine for wave energy conversion. Energies 2021, 14, 949. [Google Scholar] [CrossRef]
- An, X.D.; Jiang, L.; Hassanipour, F. Numerical analysis of air vortex interaction with porous screen. Fluids 2021, 6, 70. [Google Scholar] [CrossRef]
- Agrawal, K.K.; Misra, R.; Agrawal, G.D. CFD simulation study to evaluate the economic feasibility of backfilling materials for ground-air heat exchanger system. Geothermics 2021, 90, 102002. [Google Scholar] [CrossRef]
- Di Renzo, A.; Napolitano, E.S.; Di Maio, F.P. Coarse-grain dem modelling in fluidized bed simulation: A review. Processes 2021, 9, 279. [Google Scholar] [CrossRef]
- Voller, V.R.; Swaminathan, C.R. Eral source-based method for solidification phase change. Numer. Heat Transf. Part B Fundam. 1991, 19, 175–189. [Google Scholar] [CrossRef]
- Voller, V.R.; Brent, A.D.; Prakash, C. The modeling of heat, mass and solute transport in solidification systems. Int. J. Heat Mass Transf. 1989, 32, 1719–1731. [Google Scholar] [CrossRef]
- Voller, V.R.; Prakash, C. A fixed grid numerical modeling methodology for convection diffusion mushy region phase-change problems. Int. J. Heat Mass Transf. 1987, 30, 1709–1719. [Google Scholar] [CrossRef]
- Voller, V.R. Modeling the unidirectional solidification of a binary alloy with the heat-balance integral method. J. Min. Met. Mater. Soc. 1987, 39, A13. [Google Scholar]
- Kang, K.-G.; Ryou, H.-S. Computation of solidification and melting using the piso algorithm. Numer. Heat Transf. Part B Fundam. 2004, 46, 179–194. [Google Scholar] [CrossRef]
- Lu, J.F.; Ding, J.; Yang, J.P. Solidification and melting behaviors and characteristics of molten salt in cold filling pipe. Int. J. Heat Mass Transf. 2010, 53, 1628–1635. [Google Scholar] [CrossRef]
- Al-Maghalseh, M.M. Investigate the natural convection heat transfer in a pcm thermal storage system using ansys/fluent. Jordan J. Mech. Ind. Eng. 2017, 11, 217–223. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heating Power | Rate of Penetration (Experiment Result) | Rate of Penetration (Prediction Model Result) | Error |
|---|---|---|---|
| 240 W | 0.380 mm/s | 0.329 mm/s | 13.4% |
| 300 W | 0.458 mm/s | 0.411 mm/s | 10.2% |
| 360 W | 0.508 mm/s | 0.494 mm/s | 2.7% |
| 480 W | 0.55 mm/s | 0.65 mm/s | 18% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, C.H.; Kang, K.; Park, U.-J.; Lee, H.J.; Kim, H.S.; Park, J.-Y.; Lee, S.H. Numerical Investigation on the Evolution of Thin Liquid Layer and Dynamic Behavior of an Electro-Thermal Drilling Probe during Close-Contact Heat Transfer. Appl. Sci. 2021, 11, 3443. https://doi.org/10.3390/app11083443
Jeong CH, Kang K, Park U-J, Lee HJ, Kim HS, Park J-Y, Lee SH. Numerical Investigation on the Evolution of Thin Liquid Layer and Dynamic Behavior of an Electro-Thermal Drilling Probe during Close-Contact Heat Transfer. Applied Sciences. 2021; 11(8):3443. https://doi.org/10.3390/app11083443
Chicago/Turabian StyleJeong, Chan Ho, Kwangu Kang, Ui-Joon Park, Hyung Ju Lee, Hong Seok Kim, Jin-Yeong Park, and Seong Hyuk Lee. 2021. "Numerical Investigation on the Evolution of Thin Liquid Layer and Dynamic Behavior of an Electro-Thermal Drilling Probe during Close-Contact Heat Transfer" Applied Sciences 11, no. 8: 3443. https://doi.org/10.3390/app11083443
APA StyleJeong, C. H., Kang, K., Park, U. -J., Lee, H. J., Kim, H. S., Park, J. -Y., & Lee, S. H. (2021). Numerical Investigation on the Evolution of Thin Liquid Layer and Dynamic Behavior of an Electro-Thermal Drilling Probe during Close-Contact Heat Transfer. Applied Sciences, 11(8), 3443. https://doi.org/10.3390/app11083443