
Fractional-Order PII1/2DD1/2 Control: Theoretical Aspects and Application to a Mechatronic Axis




Abstract
:Featured Application
Abstract
1. Introduction
- -
- the integro-differential operator and its discrete-time approximation are recalled in Section 2;
- -
- the formulation of the PII1/2DD1/2 control scheme is outlined and its transfer function is compared to the ones of PID and PIλDμ in Section 3;
- -
- the frequency domain response of the three controllers is discussed in Section 4;
- -
- Section 5 debates the stability properties of closed-loop systems with IO plant and PII1/2DD1/2 control;
- -
- -
- for the same case study, the performances of the controllers are then compared considering a real implementation with finite sampling time and finite memory length of the digital filters; this analysis is carried out both by discrete-time simulation and by experimental tests (Section 8);
- -
- Section 9 and Section 10 outline conclusions, related work, and future developments.
2. The Integro-Differential Operator
- -
- similarly to IO derivatives and integrals, if an FO derivative/integral of order α is applied twice to a function of time, the resulting function is the derivative of order 2α; for example, the derivative of order 1/2 of the derivative of order 1/2 is the first-order derivative, and the integral of order 1/2 of the integral of order 1/2 is the first-order integral;
- -
- for sinusoidal functions, similarly to IO derivatives/integrals, FO derivatives/integrals of order α produce a phase shift of απ/2: for example, the first-order derivative causes a positive phase shift of π/2, while the derivative of order 1/2 causes a positive phase shift of π/4; the first-order integral causes a negative phase shift of π/2, while the integral of order 1/2 causes a negative phase shift of π/4.
3. The PII1/2DD1/2 Control Scheme
4. Frequency Domain Response of PID, PIλDμ and PII1/2DD1/2 Controllers
4.1. Factorization of Commensurate-Order Fractional-Order System
4.2. PID Frequency Response
4.3. PIλDμ Frequency Response
4.4. PII1/2DD1/2 Frequency Response
5. Stability of Closed-Loop Systems with Integer-Order Plant and PII1/2DD1/2 Control
- -
- the region with corresponds to stable under-damped behaviour;
- -
- the pair of lines with correspond to stable over-damped behaviour;
- -
- the region with corresponds to stable hyper-damped behaviour;
- -
- the negative real axis () corresponds to stable ultra-damped behaviour.
6. Bode Plot Based Tuning of PII1/2DD1/2 Control
- -
- symmetry of the magnitude plot with respect to ωmin;
- -
- the coincidence of the initial and final asymptotes, with slopes of −20 dB/dec and +20 dB/dec;
- -
- the amplitude of the central zone with null slope.
- -
- the same integral gain of the PID controller,
- -
- the following relations between the corner frequencies:
- (1)
- tune the PID gains starting from the given plant to obtain a closed-loop behaviour with adequate bandwidth and phase margin;
- (2)
- obtain the two PID corner frequencies ωc1 and ωc2 by equation (23);
- (3)
- select ρ, with 1 < ρ < ρmax = (ωc2/ωc1)1/2, and obtain the four PII1/2DD1/2 corner frequencies by equation (24);
- (4)
- set the PII1/2DD1/2 integral gain Ki to the same value of the PID integral gain tuned at step 1)
- (5)
- obtain the remaining gains Kp, Khi, Kd, Khd by Equations (17)–(20);
- (6)
- if (tuning criterium = CH) tuning is complete, else multiply all the five PII1/2DD1/2 gains (Kp, Ki, Khi, Kd, Khd) by the ratio minPID/minPIIDD to obtain the gains with tuning CL.
7. Case Study: Position Control of a Rotor by PII1/2DD1/2 Control
7.1. Comparison of PID and PII1/2DD1/2 Control in Frequency Domain and Time Domain
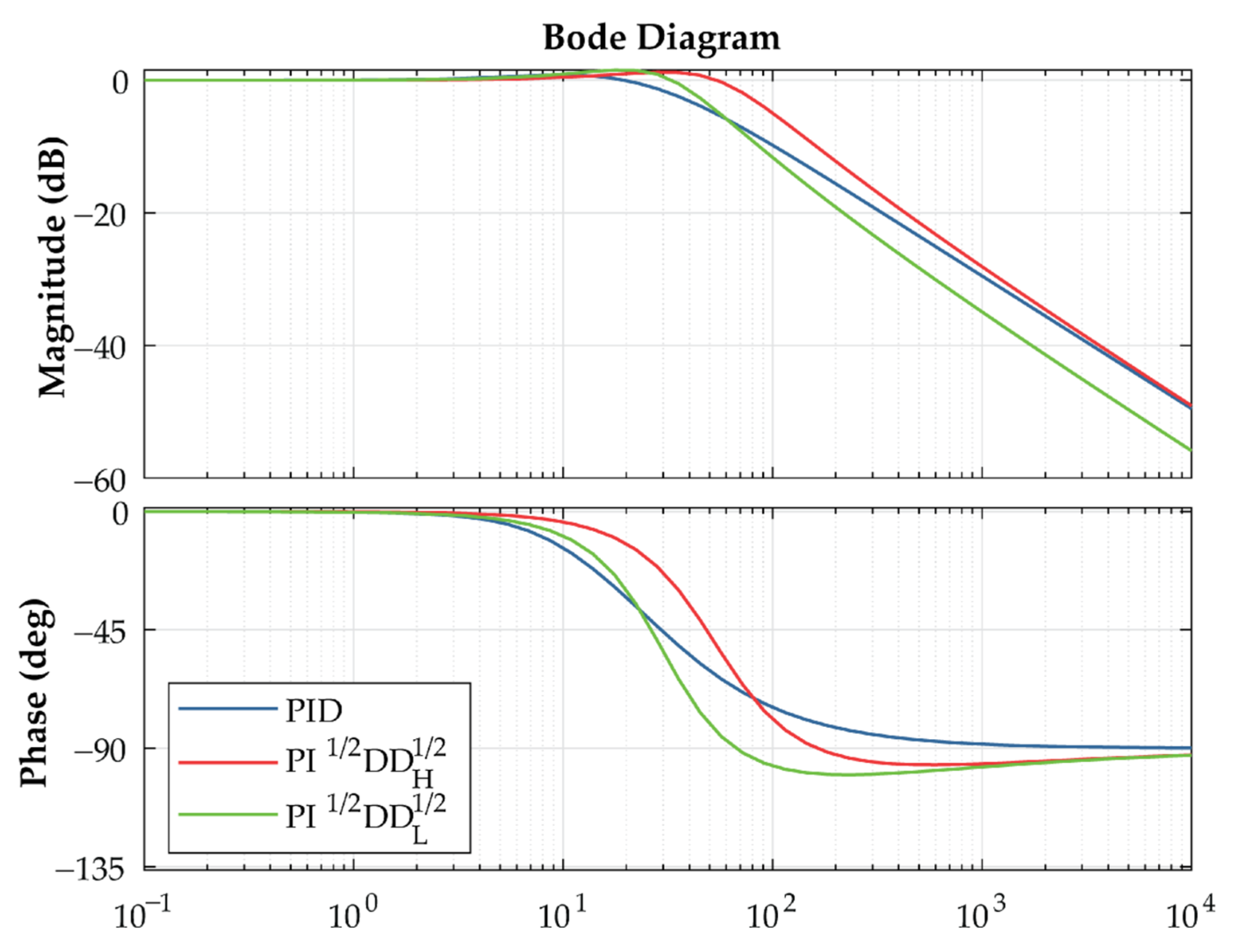
7.2. Influence of the Ratio ρ on the PII1/2DD1/2 Controller Frequency Response
- -
- the influence on the frequency response of ρ for 1 < ρ < 10 is moderate; therefore, in the example of Section 7.1, a value in the middle of this range was selected;
- -
- the PII1/2DD1/2H with ρ = 1 does not correspond to the PID, even if its corner frequencies are paired two by two and correspond to the ones of the PID (ω’c1 = ω’c2 = ωc1; ω’c3 = ω’c4 = ωc2), and consequently the asymptotic bode plots are the same (the −10 dB/dec and +10 dB/dec sections have null length).
8. Case Study: Position Control of a Rotor by PII1/2DD1/2 Control in Discrete Time
8.1. Digital Implementation of the PII1/2DD1/2 Position Control
8.2. Comparison of PID and PII1/2DD1/2 Controls in Discrete-Time Simulation
8.3. Comparison of PID and PII1/2DD1/2 Controls by Experimental Tests
8.4. Discussion of the Results
- -
- The DTS and ET experimental results are in good agreement; therefore, DTS can be considered a valuable tool for the tuning of mechatronic systems with FO controllers.
- -
- Both the PII1/2DD1/2 controllers decrease the tracking error remarkably (Table 2, ET, maximum tracking error: −71% for PII1/2DD1/2H and −34%for PII1/2DD1/2L with respect to PID; mean tracking error: −77% for PII1/2DD1/2H and −49% for PII1/2DD1/2L with respect to PID), even if the increase in maximum torque and control effort is limited (ET, maximum torque: +5% for PII1/2DD1/2H and +10% for PII1/2DD1/2L with respect to PID; control effort: +4% for PII1/2DD1/2H and +14% for PII1/2DD1/2L).
- -
- The error reduction is higher with the tuning CH, which is not surprising, since the gains are higher, but surprisingly the maximum torque and control effort are lower with the tuning CH. As a matter of fact, observing the torque time histories (Figure 10 and Figure 13) it is possible to note that, with the addition of the half-order terms, the torque is delivered with lower delay even with the discrete-time calculation, consequently reducing the tracking error. This positive effect of the half-order terms is higher with the PII1/2DD1/2H tuning: observing the detail zooms of Figure 13c, it is possible to notice that the torque peaks are more anticipated with the PII1/2DD1/2H tuning with respect to the PII1/2DD1/2L tuning.
- -
- This confirms the better control readiness of the PII1/2DD1/2 controller, already shown by the continuous-time simulations of Section 7.
9. Conclusions
10. Related Work and Future Developments
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Das, S. Functional Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Sasso, M.; Palmieri, G.; Amodio, D. Application of fractional derivative models in linear viscoelastic problems. Mech. Time-Dependent Mater. 2011, 15, 367–387. [Google Scholar] [CrossRef]
- Meral, F.C.; Royston, T.J.; Magin, R. Fractional calculus in viscoelasticity: An experimental study. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 939–945. [Google Scholar] [CrossRef]
- Atanacković, T.M.; Pilipović, S.; Stanković, B.; Zorica, D. Fractional Calculus with Applications in Mechanics: Wave Propagation, Impact and Variational Principles; Wiley: New Jersey, NY, USA, 2014. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Rihan, F.A. Numerical Modeling of Fractional-Order Biological Systems. Abstr. Appl. Anal. 2013, 2013, 816803. [Google Scholar] [CrossRef] [Green Version]
- Shaikh, A.S.; Shaikh, I.N.; Nisar, K.S. A mathematical model of COVID-19 using fractional derivative: Outbreak in India with dynamics of transmission and control. Adv. Differ. Equ. 2020, 2020, 373. [Google Scholar] [CrossRef] [PubMed]
- Kozioł, K.; Stanisławski, R.; Bialic, G. Fractional-Order SIR Epidemic Model for Transmission Prediction of COVID-19 Disease. Appl. Sci. 2020, 10, 8316. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-order systems and PIλDμ controllers. IEEE Trans. Autom. Control. 1999, 44, 208–213. [Google Scholar] [CrossRef]
- Yeroglu, C.; Tan, N. Note on fractional-order proportional-integral-differential controller design. IET Control. Theory Appl. 2012, 5, 1978–1989. [Google Scholar] [CrossRef]
- Beschi, M.; Padula, F.; Visioli, A. The generalised isodamping approach for robust fractional PID controllers design. Int. J. Control. 2015, 90, 1157–1164. [Google Scholar] [CrossRef]
- Kesarkar, A.A.; Selvaganesan, N. Tuning of optimal fractional-order PID controller using an artificial bee colony algorithm. Syst. Sci. Control. Eng. 2015, 3, 99–105. [Google Scholar] [CrossRef] [Green Version]
- Norsahperi, N.M.H.; Danapalasingam, K.A. Particle swarm-based and neuro-based FOPID controllers for a Twin Rotor System with improved tracking performance and energy reduction. ISA Trans. 2020, 102, 230–244. [Google Scholar] [CrossRef]
- Saidi, B.; Amairi, M.; Najar, S.; Aoun, M. Bode shaping-based design methods of a fractional order PID controller for uncertain systems. Nonlinear Dyn. 2015, 80, 1817–1838. [Google Scholar] [CrossRef]
- Oshnoei, A.; Khezri, R.; Muyeen, S.M.; Blaabjerg, F. On the Contribution of Wind Farms in Automatic Generation Control: Review and New Control Approach. Appl. Sci. 2018, 8, 1848. [Google Scholar] [CrossRef] [Green Version]
- Anantachaisilp, P.; Lin, Z. Fractional Order PID control of rotor suspension by active magnetic bearings. Actuators 2017, 6, 4. [Google Scholar] [CrossRef] [Green Version]
- Sondhi, S.; Hote, Y.V. Fractional order PID controller for perturbed load frequency control using Kharitonov’s theorem. Electr. Power Energy Syst. 2016, 78, 884–896. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Wang, J.; Shu, H.; Li, D.; Zeng, C.; Chen, Y.; Zhang, X.; Yu, T. Robust fractional-order PID control of supercapacitor energy storage systems for distribution network applications: A perturbation compensation based approach. J. Clean. Prod. 2021, 279, 123362. [Google Scholar] [CrossRef]
- Khubalkar, S.; Chopade, A.; Junghare, A.; Aware, M.; Das, S. Design and realization of stand-alone digital Fractional Order PID controller for buck converter fed DC Motor. Circuits Syst. Signal. Process. 2016, 35, 2189–2211. [Google Scholar] [CrossRef]
- Dimeas, I.; Petras, I.; Psychalinos, C. New analog implementation technique for fractional-order controller: A DC motor control. AEU Int. J. Electron. Commun. 2017, 78, 192–200. [Google Scholar] [CrossRef]
- Haji, V.; Monje, C. Fractional-order PID control of a chopper-fed DC motor drive using a novel firefly algorithm with dynamic control mechanism. Soft Comput. 2018, 22, 6135–6146. [Google Scholar] [CrossRef]
- Hekimoglu, B. Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control via Chaotic Atom Search Optimization Algorithm. IEEE Access 2019, 7, 38100–38114. [Google Scholar] [CrossRef]
- Puangdownreong, D. Fractional order PID controller design for DC motor speed control system via flower pollination algorithm. Trans. Electr. Eng. Electron. Commun. 2019, 17, 14–23. [Google Scholar] [CrossRef]
- Viola, J.; Angel, L.; Sebastian, J.M. Design and robust performance evaluation of a Fractional Order PID controller applied to a DC Motor. IEEE/CAA J. Autom. Sin. 2017, 4, 304–314. [Google Scholar] [CrossRef]
- Olejnik, P.; Adamski, P.; Batory, D.; Awrejcewicz, J. Adaptive Tracking PID and FOPID Speed Control of an Elastically Attached Load Driven by a DC Motor at Almost Step Disturbance of Loading Torque and Parametric Excitation. Appl. Sci. 2021, 11, 679. [Google Scholar] [CrossRef]
- Zheng, W.; Luo, Y.; Pi, Y.; Chen, Y. Improved frequency-domain design method for the fractional order proportional-integral-derivative controller optimal design: A case study of permanent magnet synchronous motor speed control. IET Control. Theory Appl. 2018, 12, 2478–2487. [Google Scholar] [CrossRef]
- Sun, G.; Ma, Z.; Yu, J. Discrete-Time Fractional Order Terminal Sliding Mode Tracking Control for Linear Motor. IEEE Trans. Ind. Electron. 2018, 65, 3386–3394. [Google Scholar] [CrossRef]
- Chen, S.Y.; Li, T.H.; Chang, C.H. Intelligent fractional-order backstepping control for an ironless linear synchronous motor with uncertain nonlinear dynamics. ISA Trans. 2019, 89, 218–232. [Google Scholar] [CrossRef]
- Lino, P.; Maione, G. Cascade Fractional-Order PI Control of a Linear Positioning System. IFAC PapersOnLine 2018, 51, 557–562. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Xia, J.; Shen, H.; Meng, B. Adaptive sliding mode output tracking control based-FODOB for a class of uncertain fractional-order nonlinear time-delayed systems. Sci. China Technol. Sci. 2020, 63, 1854–1862. [Google Scholar] [CrossRef]
- Han, S. Grey Wolf and Weighted Whale Algorithm Optimized IT2 Fuzzy Sliding Mode Backstepping Control with Fractional-Order Command Filter for a Nonlinear Dynamic System. Appl. Sci. 2021, 11, 489. [Google Scholar] [CrossRef]
- Bruzzone, L.; Bozzini, G. Application of the PDD1/2 algorithm to position control of serial robots. In Proceedings of the 28th IASTED International Conference Modelling, Identification and Control (MIC 2009), Innsbruck, Austria, 16–18 February 2009; pp. 225–230. [Google Scholar]
- Bruzzone, L.; Bozzini, G. PDD1/2 control of purely inertial systems: Nondimensional analysis of the ramp response. In Proceedings of the 30th IASTED International Conference Modelling, Identification, and Control (MIC 2011), Innsbruck, Austria, 14–16 February 2011; pp. 308–315. [Google Scholar] [CrossRef]
- Bruzzone, L.; Fanghella, P. Fractional order control of the 3-CPU parallel kinematics Machine. In Proceedings of the 32nd IASTED International Conference Modelling, Identification and Control (MIC 2013), Innsbruck, Austria, 11–13 February 2013; pp. 286–292. [Google Scholar] [CrossRef]
- Bruzzone, L.; Fanghella, P. Fractional-order control of a micrometric linear axis. J. Control. Sci. Eng. 2013, 2013, 947428. [Google Scholar] [CrossRef] [Green Version]
- Corinaldi, D.; Palpacelli, M.; Carbonari, L.; Bruzzone, L.; Palmieri, G. Experimental analysis of a fractional-order control applied to a second order linear system. In Proceedings of the 10th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA 2014), Senigallia, Italy, 10–12 September 2014; p. 108901. [Google Scholar] [CrossRef]
- Bruzzone, L.; Fanghella, P. Comparison of PDD1/2 and PDμ position controls of a second order linear system. In Proceedings of the 33rd IASTED International Conference on Modelling, Identification and Control (MIC 2014), Innsbruck, Austria, 17–19 February 2014; pp. 182–188. [Google Scholar] [CrossRef]
- Bruzzone, L.; Fanghella, P.; Baggetta, M. Experimental assessment of Fractional-Order PDD1/2 control of a brushless DC motor with inertial load. Actuators 2020, 9, 13. [Google Scholar] [CrossRef] [Green Version]
- Bruzzone, L.E.; Molfino, R.M.; Zoppi, M. An impedance-controlled parallel robot for high-speed assembly of white goods. Ind. Robot. 2005, 32, 226–233. [Google Scholar] [CrossRef]
- Jakovljevic, B.B.; Sekara, T.B.; Rapaic, M.R.; Jelicic, Z.D. On the distributed order PID controller. Int. J. Electron. Commun. 2017, 79, 94–101. [Google Scholar] [CrossRef]
- Jakovljevic, B.B.; Lino, P.; Maione, G. Fractional and Distributed Order PID Controllers for PMSM Drives. In Proceedings of the 18th European Control Conference (ECC), Napoli, Italy, 25–28 June 2019; pp. 4100–4105. [Google Scholar]
- Jakovljevic, B.B.; Lino, P.; Maione, G. Control of double-loop permanent magnet synchronous motor drives by optimized fractional and distributed-order PID controllers. Eur. J. Control 2021, 58, 232–244. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Machado, J.T. Fractional-order derivative approximations in discrete-time control systems. J. Syst. Anal. Model. Simul. 1999, 34, 419–434. [Google Scholar]
- Chen, Y.Q.; Petras, I.; Xue, D. Fractional Order Control—A Tutorial. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1397–1411. [Google Scholar]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-Order Systems and Controls; Springer: London, UK, 2010. [Google Scholar]
- Matignon, D. Generalized Fractional Differential and Difference Equations: Stability Properties and Modelling Issues. In Proceedings of the Mathematical Theory of Networks and Systems Symposium, Padova, Italy, 6–10 July 1998. [Google Scholar]
- Tavazoei, M.; Asemani, M.H. On robust stability of incommensurate fractional-order systems. Commun. Nonlinear Sci. Numer. Simulat. 2020, 90, 105344. [Google Scholar] [CrossRef]
- Sands, T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 2144. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kp (Nm/rad) | Ki (Nm/rad·s) | Khi (Nm/rad·s1/2) | Kd (Nms/rad) | Khd (Nms1/2/rad) | |
|---|---|---|---|---|---|
| Tuning CH | 3.3 × 10−1 | 5.0 × 10−3 | 9.3 × 10−2 | 3.5 × 10−2 | 2.5 × 10−1 |
| Tuning CL | 1.5 × 10−1 | 2.3 × 10−3 | 4.2 × 10−2 | 1.6 × 10−2 | 1.1 × 10−1 |
| eθ,max (rad) | eθ,mean (rad) | Mmax (Nm) | Ec (N2m2s) | ||
|---|---|---|---|---|---|
| PID | DTS | 1.903 | 0.532 | 0.693 | 0.1400 |
| ET | 1.661 | 0.445 | 0.617 | 0.1040 | |
| PII1/2DD1/2H | DTS | 0.556 | 0.126 | 0.759 | 0.1437 |
| −70.78% | −76.32% | +9.52% | +2.61% | ||
| ET | 0.478 | 0.101 | 0.649 | 0.1086 | |
| −71.22% | −77.30% | +5.19% | +4.39% | ||
| PII1/2DD1/2L | DTS | 1.266 | 0.284 | 0.753 | 0.1545 |
| −33.47% | −46.62% | +8.66% | +10.30% | ||
| ET | 1.102 | 0.225 | 0.681 | 0.1181 | |
| −33.65% | −49.44% | +10.37% | +13.55% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bruzzone, L.; Baggetta, M.; Fanghella, P. Fractional-Order PII1/2DD1/2 Control: Theoretical Aspects and Application to a Mechatronic Axis. Appl. Sci. 2021, 11, 3631. https://doi.org/10.3390/app11083631
Bruzzone L, Baggetta M, Fanghella P. Fractional-Order PII1/2DD1/2 Control: Theoretical Aspects and Application to a Mechatronic Axis. Applied Sciences. 2021; 11(8):3631. https://doi.org/10.3390/app11083631
Chicago/Turabian StyleBruzzone, Luca, Mario Baggetta, and Pietro Fanghella. 2021. "Fractional-Order PII1/2DD1/2 Control: Theoretical Aspects and Application to a Mechatronic Axis" Applied Sciences 11, no. 8: 3631. https://doi.org/10.3390/app11083631
APA StyleBruzzone, L., Baggetta, M., & Fanghella, P. (2021). Fractional-Order PII1/2DD1/2 Control: Theoretical Aspects and Application to a Mechatronic Axis. Applied Sciences, 11(8), 3631. https://doi.org/10.3390/app11083631