
Straight Gait Research of a Small Electric Hexapod Robot



Abstract
:1. Introduction
- Compared to the traditional hexapod robot gait planning method, the strategy “increasing duty factor” is introduced to ensure the stability of robot motion;
- All kinds of gaits are described based on the discretization and time sequence diagram, and the robot gait conversion scheme is designed. This is so that the robot can flexibly transform among various gaits to ensure the integrity and coordination of the motion, which is less studied in the previous research;
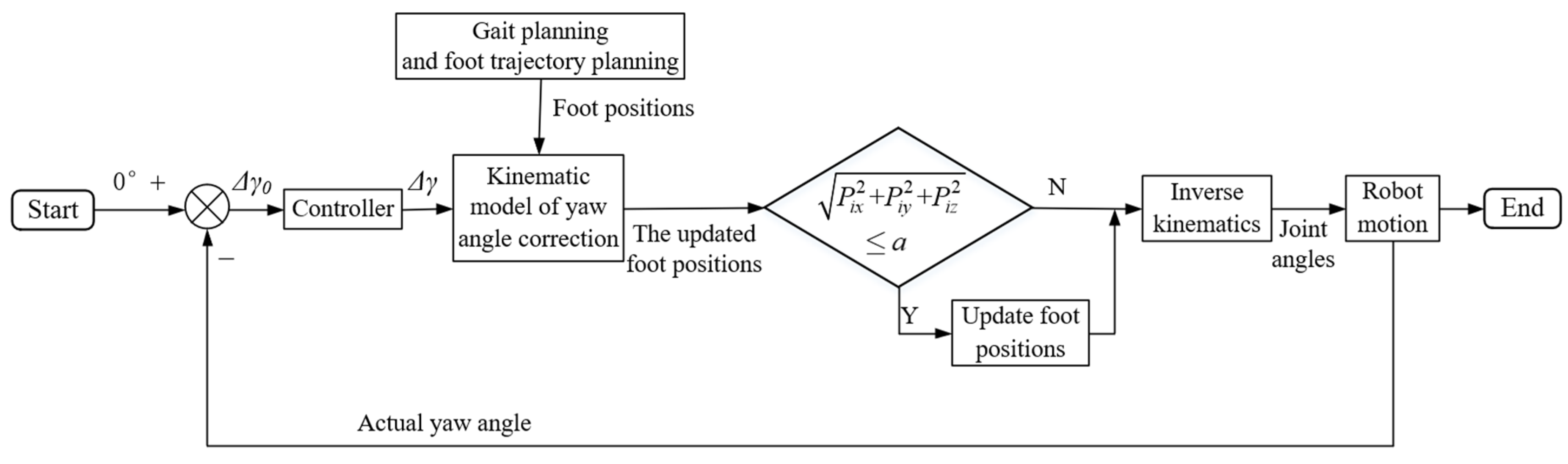
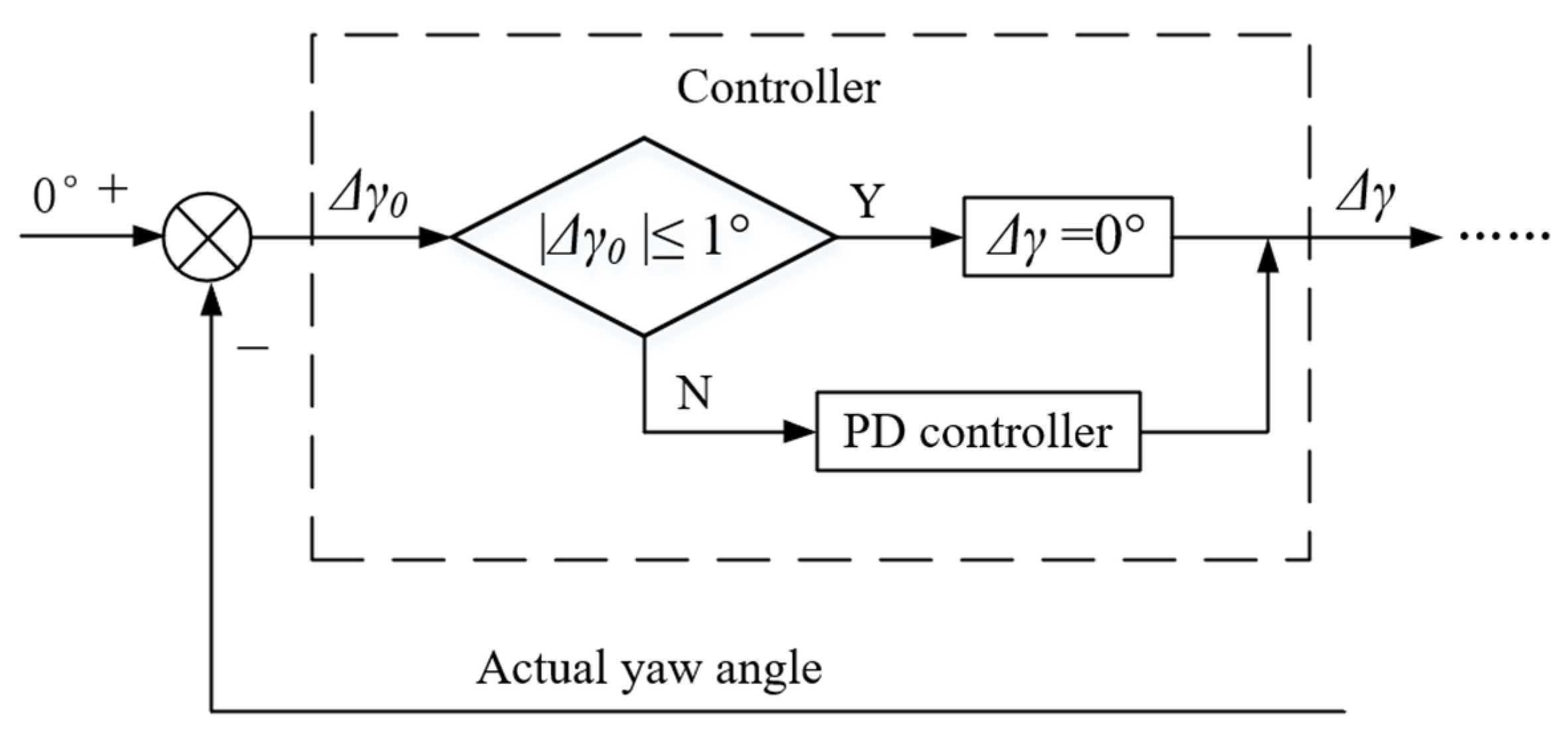
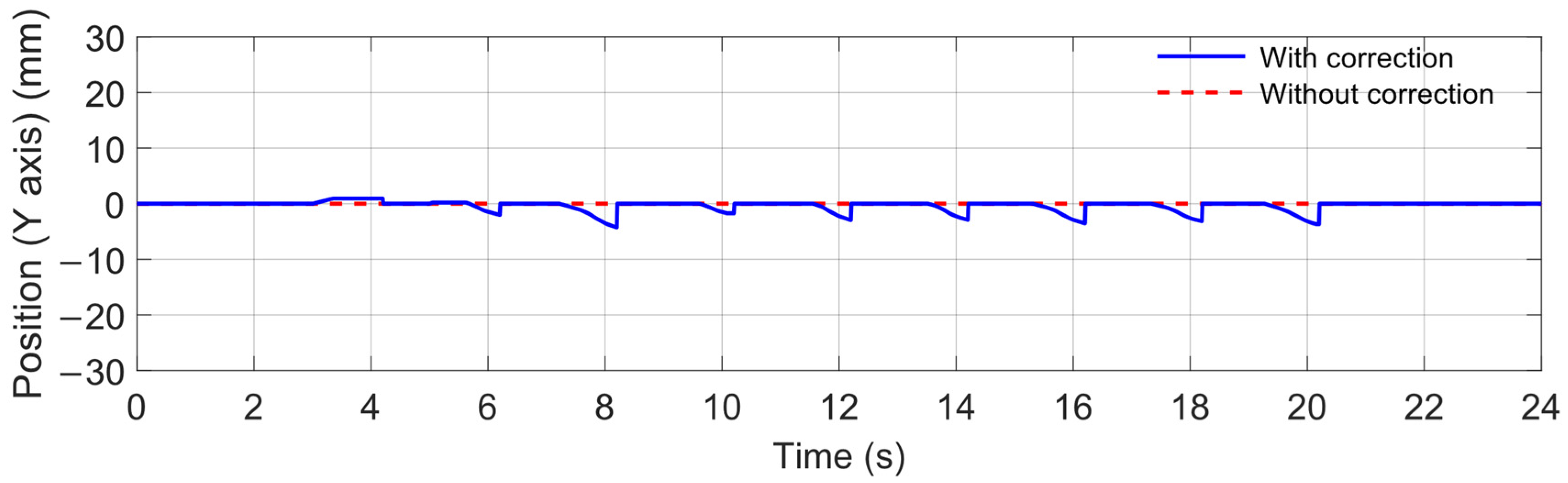
- A yaw angle correction algorithm is proposed based on kinematics analysis and the PD controller to reduce the motion error of the robot.
2. Related Work
3. Basic Control Method of the Robot
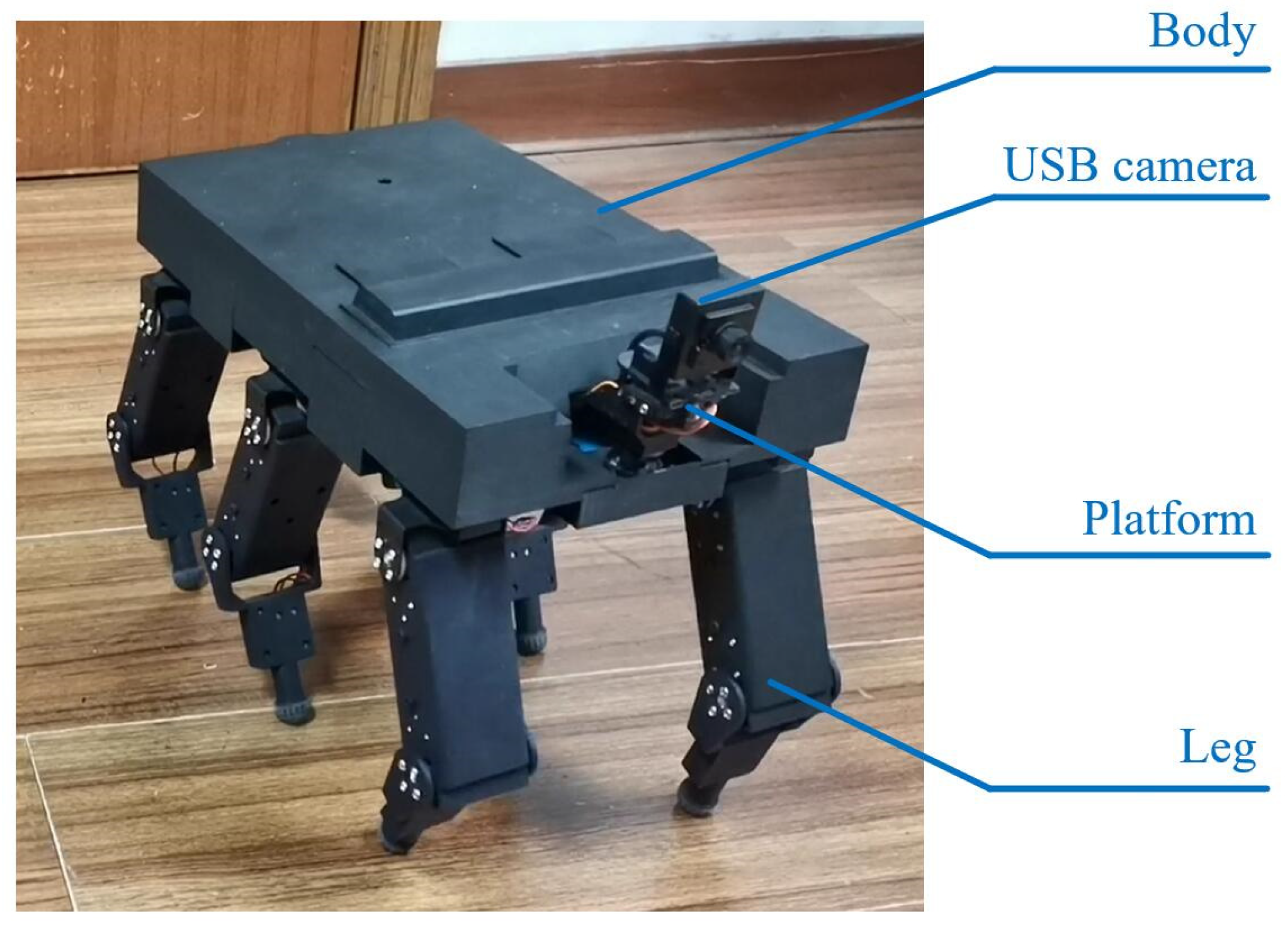
3.1. Control System
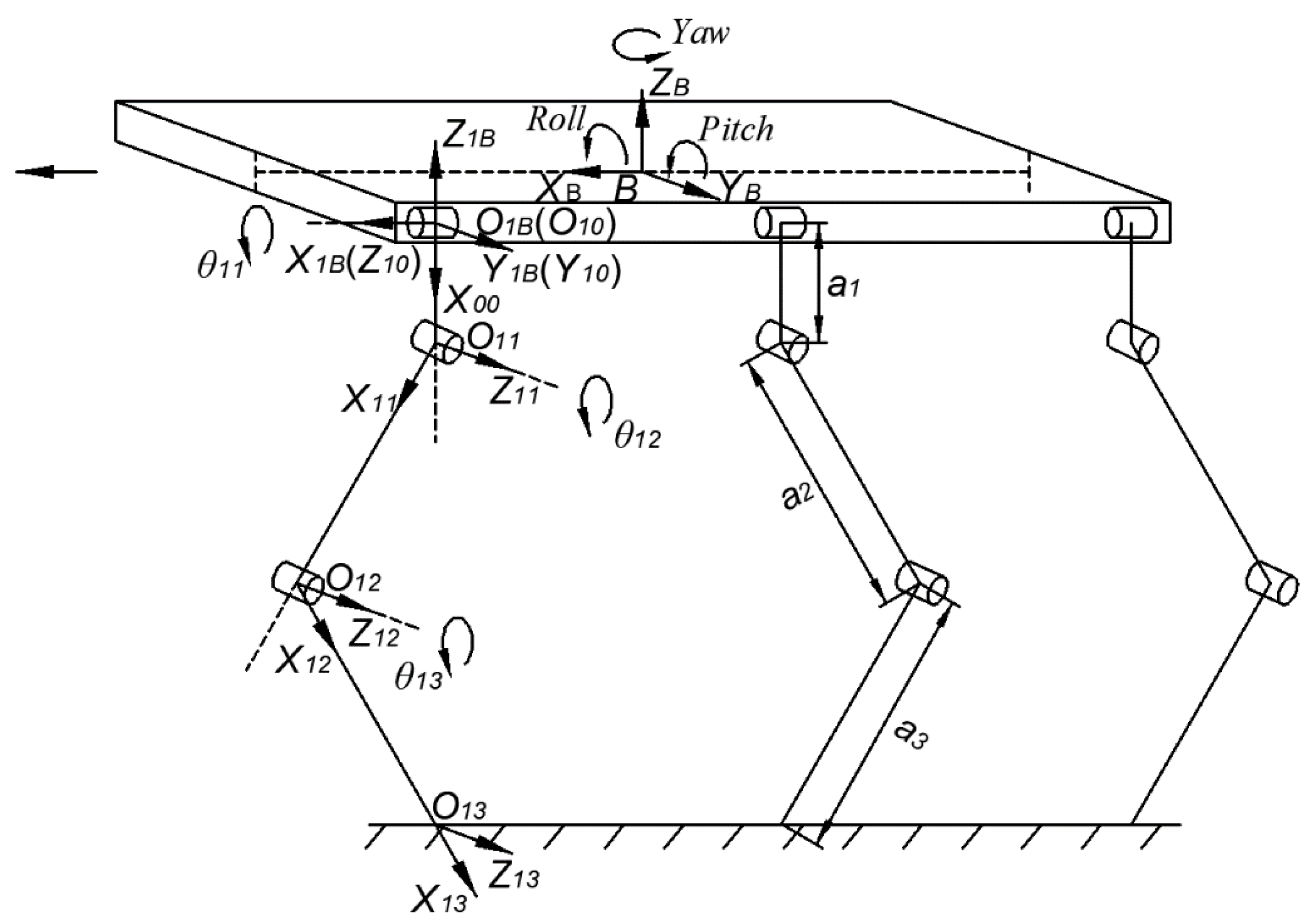
3.2. Kinematic Analysis
3.3. Foot Trajectory Planning
4. Straight Gait Planning
4.1. Increase of the Duty Factor
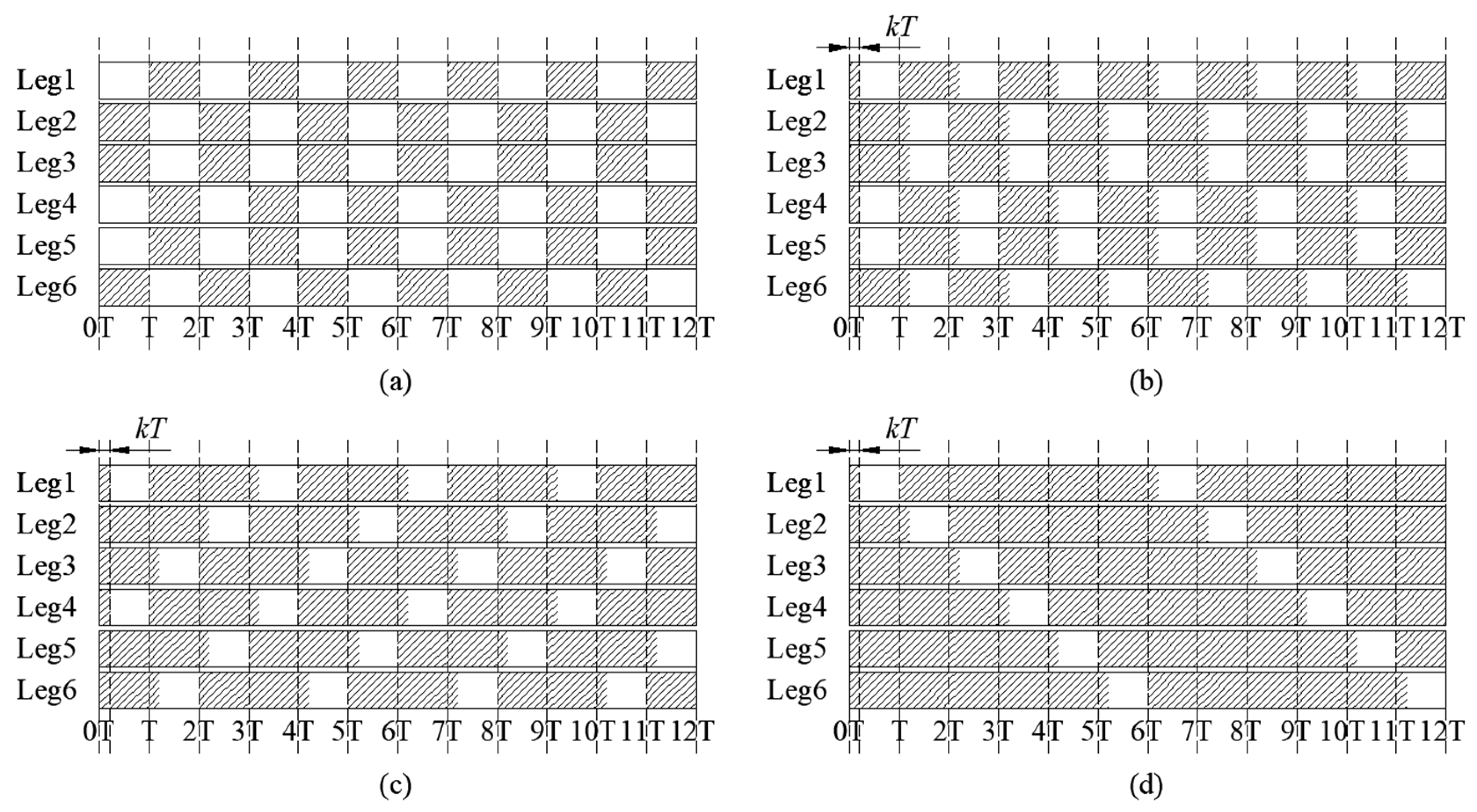
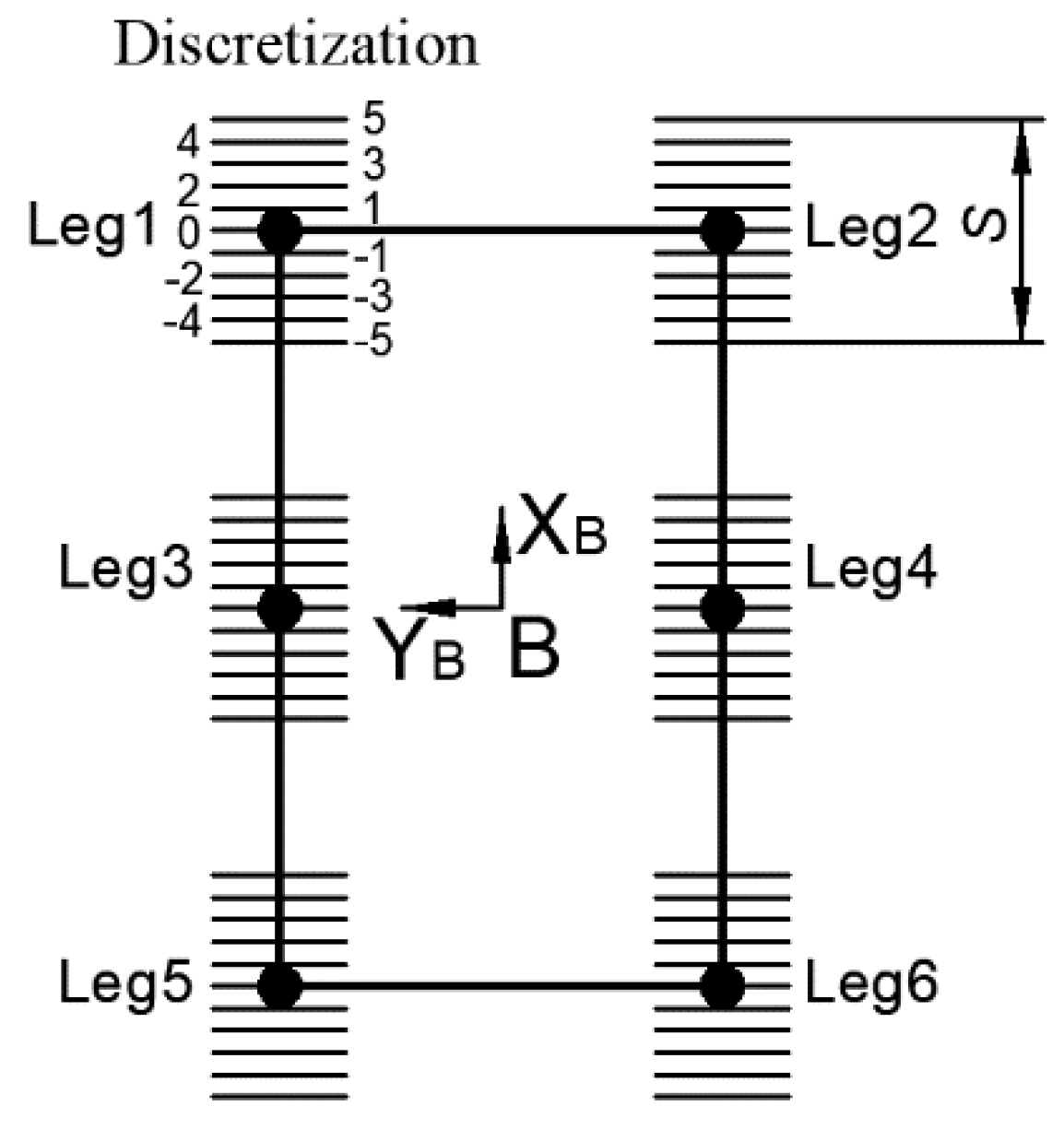
4.2. Description Based on Discretization and Time Sequence Diagram
4.3. Gait Transformation Scheme
- Stability principle: When determining the swing leg, the robot should first be able to maintain static stability. Take leg 1, leg 4, and leg 5 as one group, and leg 2, leg 3, and leg 6 as another group. In one step, the robot can swing at most three legs at a time (the three legs must be in the same group), and the two adjacent legs cannot swing at the same time. Otherwise, the robot will lose its stability;
- Rapidity principle: On the premise of ensuring the stability of the robot, choose the least number of steps to adjust, then strive to adjust the least number of legs.
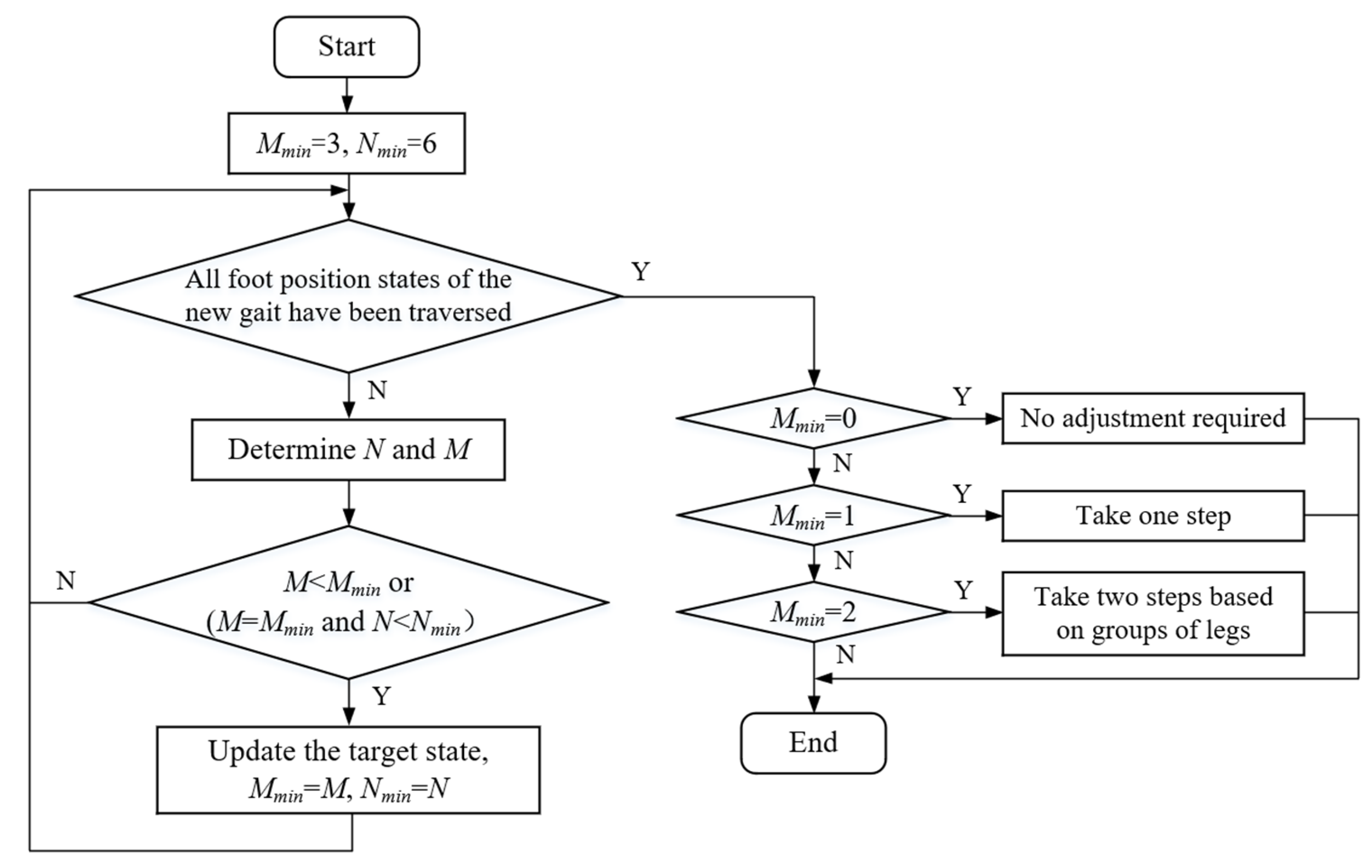
- First, define a few parameters. M: the number of adjustment steps in gait transformation. N: the number of legs that need to be adjusted in gait transformation. Mmin: the minimum number of adjustment steps required in gait transformation. Nmin: the minimum number of legs required to be adjusted in gait transformation. The initial values of Mmin and Nmin are set to 3 and 6, respectively;
- Traverse each foot position state in the new gait and compare it with the current foot position state of the robot. The previous parameters can be determined in this process. Since the foot positions of the six legs are already included in the set P, when the two states are compared, N is easy to determine. Next, based on the stability principle, discuss in several situations: (1) If N is greater than 3, M must be 2; (2) If N is 3 and the three legs to be adjusted are in the same group, M is 1, otherwise M is 2; (3) If N is 2, and the two legs to be adjusted are not adjacent, M is 1, otherwise M is 2; (4) If N is 1, M is 1; (5) If N is 0, M is 0. This way, M can be determined. If M is less than Mmin, or although M is equal to Mmin, N is less than Nmin, update Mmin and Nmin, and make the current traversed foot position state as the target state;
- After the traversal is completed, the final adjustment steps can be determined. If Mmin is 0, the robot can directly enter the new gait without adjusting foot positions. If Mmin is 1, the robot only needs one step to complete the adjustment. If Mmin is 2, based on the grouping of robot legs in the tripod gait, we can only adjust the positions of the legs in the same group in one step to ensure the stability principle. And the gait transformation process is completed in two steps finally.
5. Correction Algorithm of Yaw Angle
6. Experiments
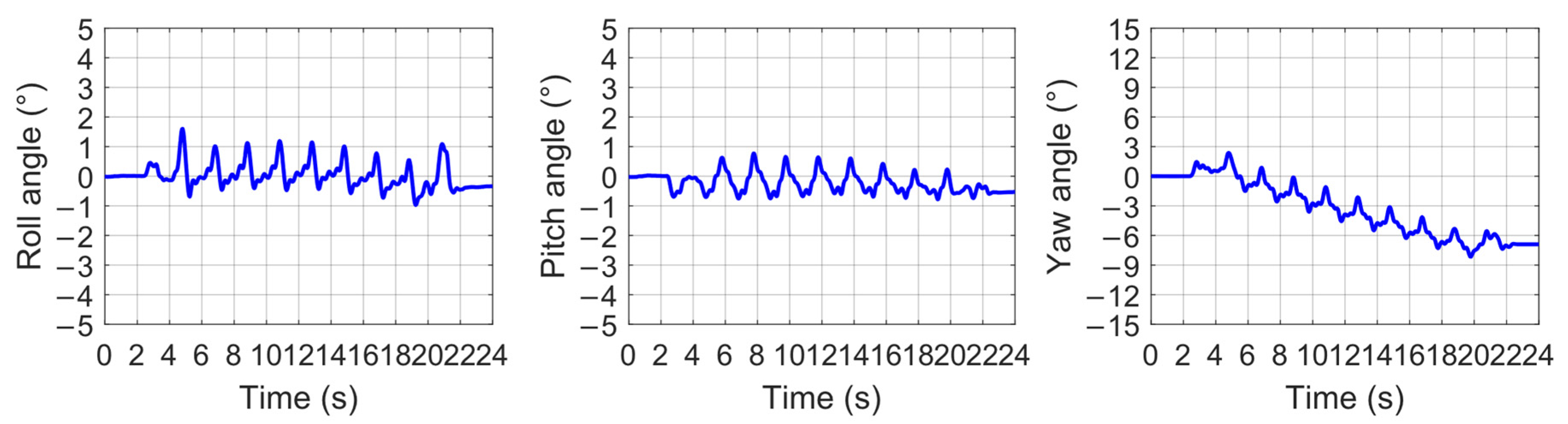
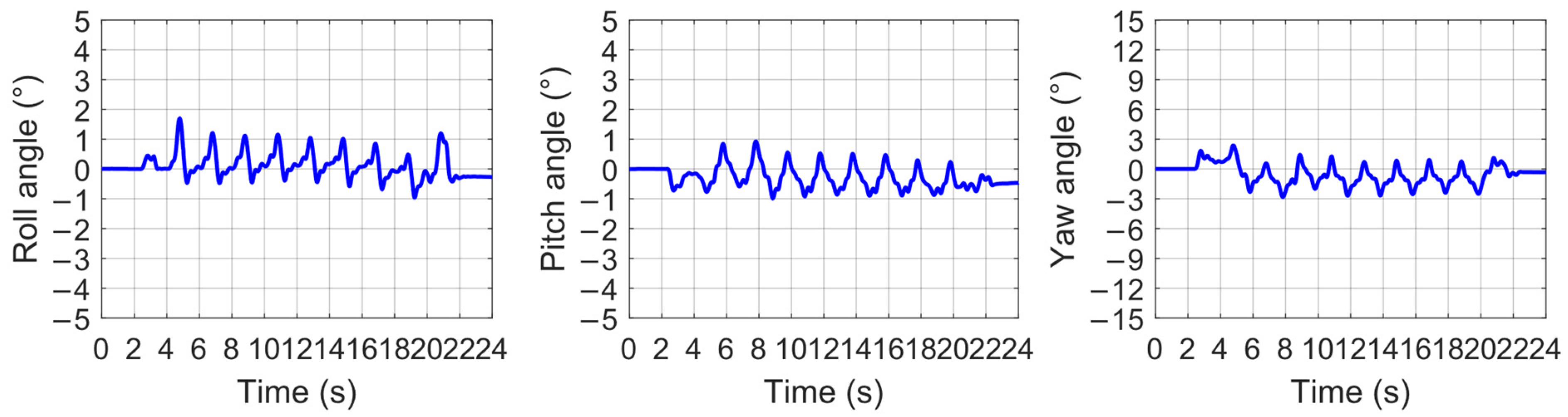
6.1. Verification of Yaw Angle Control Algorithm
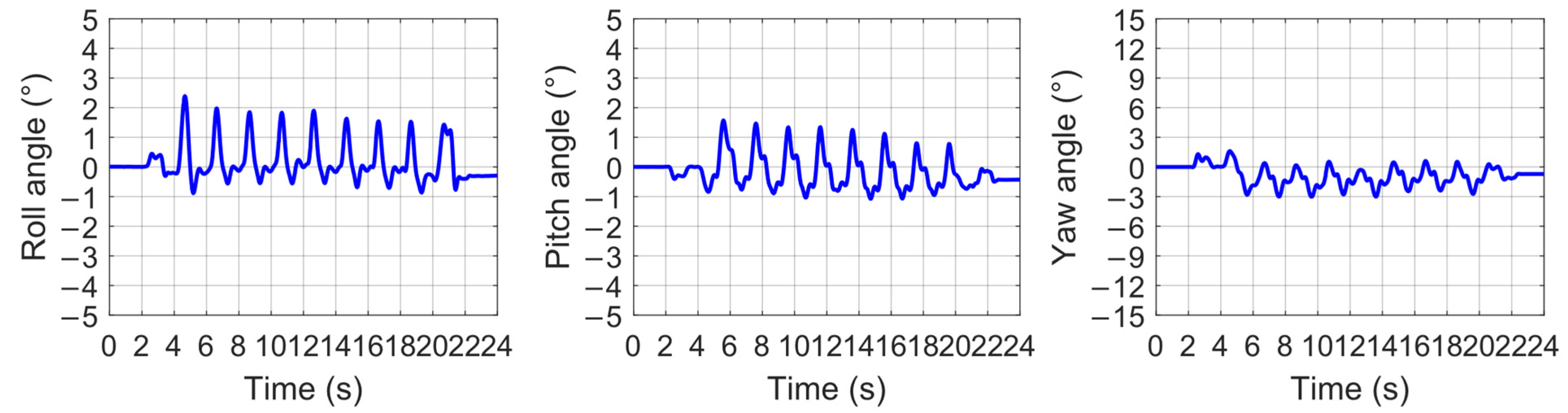
6.2. Verification of the Strategy of “Increasing Duty Factor”
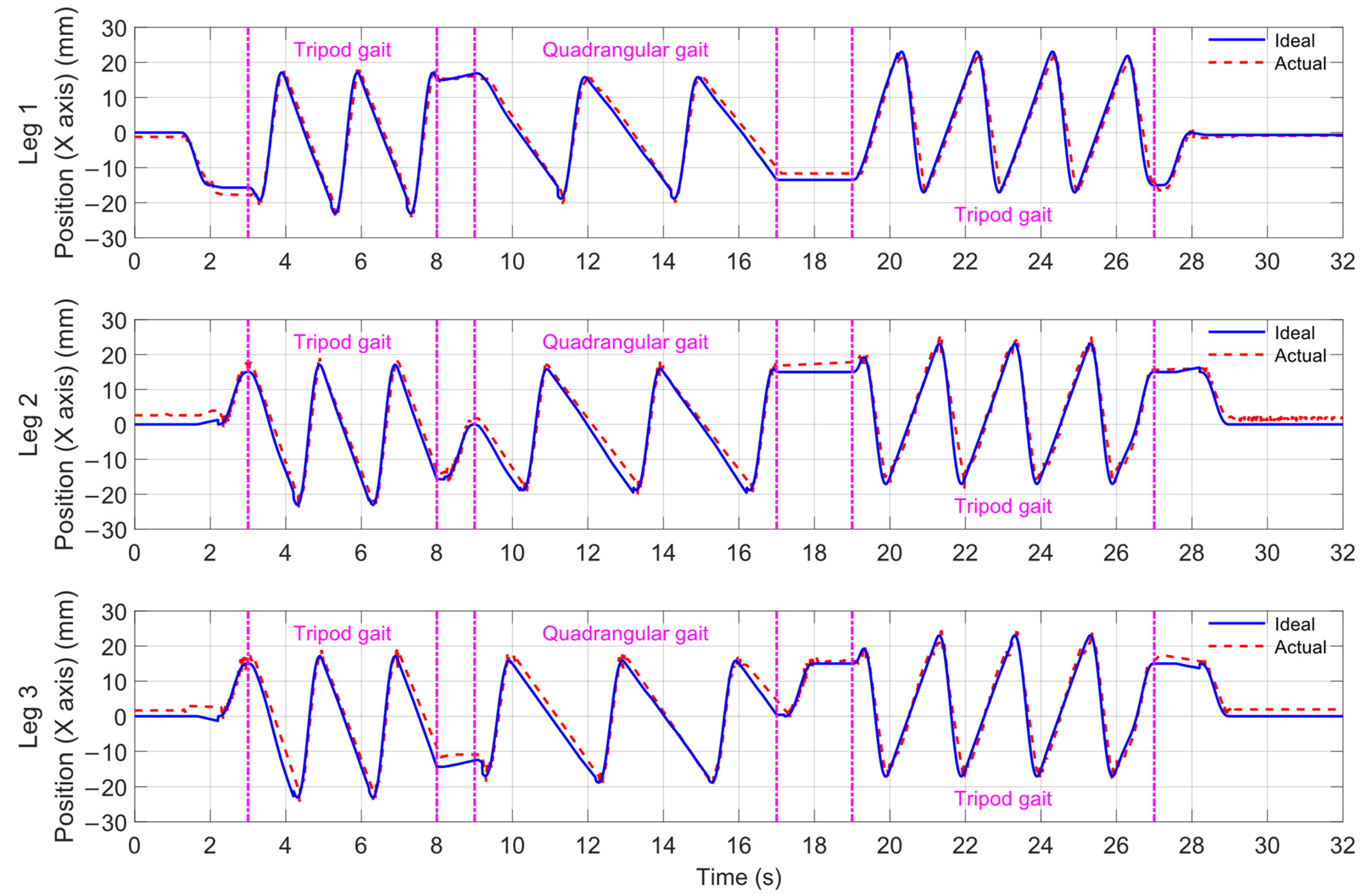
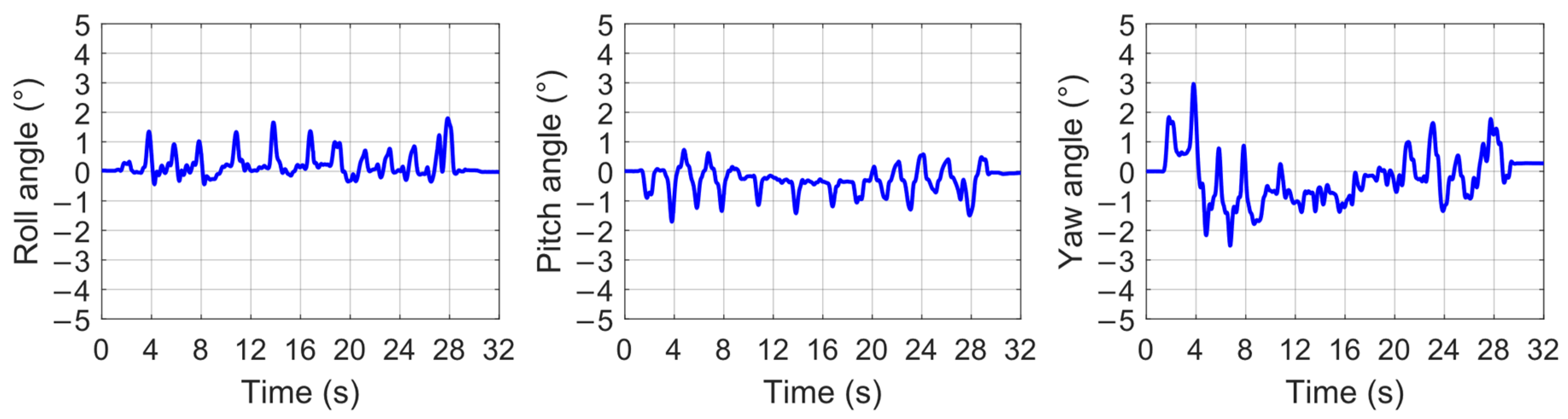
6.3. Comparison and Transformation of Different Types of Gait
7. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wan, G.; Deng, F.; Jiang, Z.; Lin, S.; Zhao, C.; Liu, B.; Chen, G.; Chen, S.; Cai, X.; Wang, H.; et al. Attention shifting during child—Robot interaction: A preliminary clinical study for children with autism spectrum disorder. Front. Inf. Technol. Electron. Eng. 2019, 20, 374–387. [Google Scholar] [CrossRef]
- Kanner, O.Y.; Rojas, N.; Odhner, L.U.; Dollar, A.M. Adaptive Legged Robots through Exactly Constrained and Non-Redundant Design. IEEE Access 2017, 5, 11131–11141. [Google Scholar] [CrossRef]
- Yang, Y. Fault-Tolerant Gait Planning for a Hexapod Robot Walking over Rough Terrain. J. Intell. Robot. Syst. 2009, 54, 613–627. [Google Scholar] [CrossRef]
- Xin, G.; Deng, H.; Zhong, G.; Wang, H. Gait and Trajectory Rolling Planning for Hexapod Robot in Complex Environment. In Mechanism and Machine Science; Springer: Singapore, 2017; pp. 23–33. [Google Scholar]
- Brooks, R.A. A Robot that Walks; Emergent Behaviors from a Carefully Evolved Network. Neural Comput. 1989, 1, 253–262. [Google Scholar] [CrossRef]
- Espenschied, K.S.; Quinn, R.D.; Beer, R.D.; Chiel, H.J. Biologically based distributed control and local reflexes improve rough terrain locomotion in a hexapod robot. Robot. Auton. Syst. 1996, 18, 59–64. [Google Scholar] [CrossRef]
- Chilian, A.; Hirschmüller, H.; Görner, M. Multisensor data fusion for robust pose estimation of a six-legged walking robot. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2497–2504. [Google Scholar]
- Zhang, H.; Liu, Y.; Zhao, J.; Chen, J.; Yan, J. Development of a bionic hexapod robot for walking on unstructured terrain. J. Bionic Eng. 2014, 11, 176–187. [Google Scholar] [CrossRef]
- Kim, J.; Jun, B.; Park, I. Six-legged walking of ‘Little Crabster’ on uneven terrain. Int. J. Precis. Eng. Manuf. 2017, 18, 509–518. [Google Scholar] [CrossRef]
- Kim, J.H.; Rhyu, S.H.; Jung, I.S.; Seo, J.M. An investigation on development of motor and gearheas for small mechanism. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1049–1053. [Google Scholar]
- Irawan, A.; Nonami, K. Optimal impedance control based on body inertia for a hydraulically driven hexapod robot walking on uneven and extremely soft terrain. J. Field Robot. 2011, 28, 690–713. [Google Scholar] [CrossRef]
- Davliakos, I.; Roditis, I.; Lika, K.; Breki, C.M.; Papadopoulos, E. Design, development, and control of a tough electrohydraulic hexapod robot for subsea operations. Adv. Robot. 2018, 32, 477–499. [Google Scholar] [CrossRef]
- Garcia, E.; Jimenez, M.A.; De Santos, P.G.; Armada, M. The evolution of robotics research. IEEE Robot. Autom. Mag. 2007, 14, 90–103. [Google Scholar] [CrossRef]
- Hwang, M.; Liu, F.; Yang, J.; Lin, Y. The Design and Building of a Hexapod Robot with Biomimetic Legs. Appl. Sci. 2019, 9, 2792. [Google Scholar] [CrossRef] [Green Version]
- Tedeschi, F.; Carbone, G. Design Issues for Hexapod Walking Robots. Robotics 2014, 3, 181–206. [Google Scholar] [CrossRef] [Green Version]
- Pratihar, D.K.; Deb, K.; Ghosh, A. Optimal path and gait generations simultaneously of a six-legged robot using a GA-fuzzy approach. Robot. Auton. Syst. 2002, 41, 1–20. [Google Scholar] [CrossRef]
- Collins, J.J.; Stewart, I. Hexapodal gaits and coupled nonlinear oscillator models. Biol. Cybern. 1993, 68, 287–298. [Google Scholar] [CrossRef]
- Cruse, H.; Kindermann, T.; Schumm, M.; Dean, J.; Schmitz, J. Walknet-a biologically inspired network to control six-legged walking. Neural Netw. 1998, 11, 1435–1447. [Google Scholar] [CrossRef]
- Görner, M.; Wimböck, T.; Hirzinger, G. The DLR Crawler: Evaluation of gaits and control of an actively compliant six-legged walking robot. Ind. Robot Int. J. 2009, 36, 344–351. [Google Scholar] [CrossRef]
- Pavone, M.; Arena, P.; Fortuna, L.; Frasca, M.; Patané, L. Climbing obstacle in bio-robots via CNN and adaptive attitude. Int. J. Circuit Theory Appl. 2006, 34, 109–125. [Google Scholar] [CrossRef]
- Chen, G.; Jin, B.; Chen, Y. Solving position-posture deviation problem of multi-legged walking robots with semi-round rigid feet by closed-loop control. J. Cent. South Univ. 2014, 21, 4133–4141. [Google Scholar] [CrossRef]
- Boscariol, P.; Henrey, M.A.; Li, Y.; Menon, C. Optimal Gait for Bioinspired Climbing Robots Using Dry Adhesion: A Quasi-Static Investigation. J. Bionic Eng. 2013, 10, 1–11. [Google Scholar] [CrossRef]
- Luneckas, M.; Luneckas, T.; Kriaučiūnas, J.; Udris, D.; Plonis, D.; Damaševičius, R.; Maskeliūnas, R. Hexapod Robot Gait Switching for Energy Consumption and Cost of Transport Management Using Heuristic Algorithms. Appl. Sci. 2021, 11, 1339. [Google Scholar] [CrossRef]
- Luneckas, M.; Luneckas, T.; Udris, D.; Plonis, D.; Maskeliunas, R.; Damasevicius, R. Energy-Efficient Walking over Irregular Terrain: A Case of Hexapod Robot. Metrol. Meas. Syst. 2019, 26, 645–660. [Google Scholar]
- Luneckas, M.; Luneckas, T.; Udris, D.; Plonis, D.; Maskeliūnas, R.; Damaševičius, R. A Hybrid Tactile Sensor-Based Obstacle Overcoming Method for Hexapod Walking Robots. Intel. Serv. Robot. 2021, 14, 9–24. [Google Scholar] [CrossRef]
- Zhai, S.; Jin, B.; Cheng, Y. Mechanical Design and Gait Optimization of Hydraulic Hexapod Robot Based on Energy Conservation. Appl. Sci. 2020, 10, 3884. [Google Scholar] [CrossRef]
- Xie, H.; Zhang, Z.; Shang, J.; Luo, Z. Mechanical Design of A Modular Quadruped Robot—Xdog. In Proceedings of the International Conference on Mechatronics, Electronic, Industrial and Control Engineering (MEIC 14), Shenyang, China, 15–17 November 2014; pp. 1074–1078. [Google Scholar]
- Corke, P.I. A Simple and Systematic Approach to Assigning Denavit-Hartenberg Parameters. IEEE Trans. Robot. 2007, 23, 590–594. [Google Scholar] [CrossRef] [Green Version]
- García-López, M.C.; Gorrostieta-Hurtado, E.; Vargas-Soto, J.E.; Ramos-Arreguin, J.M.; Sotomayor-Olmedo, A.; Morales, J.C. Kinematic analysis for trajectory generation in one leg of a hexapod robot. Procedia Technol. 2012, 3, 342–350. [Google Scholar] [CrossRef] [Green Version]
- Dau, V.; Chew, C.; Poo, A. Optimal trajectory generation for bipedal robots. In Proceedings of the 2007 7th IEEE-RAS International Conference on Humanoid Robots, Pittsburgh, PA, USA, 29 November–1 December 2007; pp. 603–608. [Google Scholar]
- Roy, S.S.; Pratihar, D.K. Effects of turning gait parameters on energy consumption and stability of a six-legged walking robot. Robot. Auton. Syst. 2012, 60, 72–82. [Google Scholar] [CrossRef]
- Sun, J.; Ren, J.; Jin, Y.; Wang, B.; Chen, D. Hexapod robot kinematics modeling and tripod gait design based on the foot end trajectory. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 2611–2616. [Google Scholar]
- Li, M.; Zhang, X.; Zhang, J.; Zhang, M. Free gait generation based on discretization for a hexapod robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 2334–2338. [Google Scholar]
- Erden, M.S.; Leblebicioğlu, K. Free gait generation with reinforcement learning for a six-legged robot. Robot. Auton. Syst. 2008, 56, 199–212. [Google Scholar] [CrossRef]
- Tomei, P. Adaptive PD controller for robot manipulators. IEEE Trans. Robot. Autom. 2002, 7, 565–570. [Google Scholar] [CrossRef]
- Khalili, H.H.; Cheah, W.; Garcia-Nathan, T.B.; Carrasco, J.; Watson, S.; Lennox, B. Tuning and sensitivity analysis of a hexapod state estimator. Robot. Auton. Syst. 2020, 129, 1–17. [Google Scholar] [CrossRef]
- Cheng, X.; Tu, X.; Zhou, Y.; Zhou, R. Active Disturbance Rejection Control of Multi-Joint Industrial Robots Based on Dynamic Feedforward. Electronics 2019, 8, 591. [Google Scholar] [CrossRef] [Green Version]
- Reinhart, R.F.; Shareef, Z.; Steil, J.J. Hybrid Analytical and Data-Driven Modeling for Feed-Forward Robot Control†. Sensors 2017, 17, 311. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | ||||
|---|---|---|---|---|
| 1 | 0 | −90° | ||
| 2 | 0 | 0 | ||
| 3 | 0 | 0 |
| Range | Length | ||
|---|---|---|---|
| [−20°, 20°] | 42 mm | ||
| [−85°, 85°] | 100 mm | ||
| [−85°, 85°] | 100 mm |
| Data Type | Data in the Experiment with the Algorithm | Data in the Experiment without the Algorithm |
|---|---|---|
| The mean of the yaw data | −0.804° | −3.323° |
| The SD of the yaw data | 1.056° | 2.472° |
| The RMSE of the yaw data | 1.327° | 4.141° |
| Data Type | Data in the Experiment with the Strategy | Data in the Experiment without the Strategy |
|---|---|---|
| The mean of the roll data | 0.156° | 0.205° |
| The mean of the pitch data | −0.263° | −0.118° |
| The mean of the yaw data | −0.804° | −1.127° |
| The SD of the roll data | 0.453° | 0.710° |
| The SD of the pitch data | 0.428° | 0.659° |
| The SD of the yaw data | 1.056° | 1.011° |
| The RMSE of the roll data | 0.479° | 0.739° |
| The RMSE of the pitch data | 0.502° | 0.669° |
| The RMSE of the yaw data | 1.327° | 1.514° |
| Data Type | Experimental Data of Tripod Gait | Experimental Data of Quadrangular Gait | Experimental Data of Pentagonal Gait |
|---|---|---|---|
| The mean of the roll data | −0.063° | 0.060° | 0.121° |
| The mean of the pitch data | −0.091° | −0.009° | −0.178° |
| The mean of the yaw data | −0.840° | −0.837° | −0.525° |
| The SD of the roll data | 0.385° | 0.398° | 0.236° |
| The SD of the pitch data | 0.355° | 0.290° | 0.221° |
| The SD of the yaw data | 0.900° | 0.368° | 0.296° |
| The RMSE of the roll data | 0.390° | 0.403° | 0.265° |
| The RMSE of the pitch data | 0.366° | 0.290° | 0.284° |
| The RMSE of the yaw data | 1.231° | 0.914° | 0.603° |
| The actual walking distance | 345 mm | 335 mm | 324 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Zhang, S.; Wang, Q.; Yang, Y.; Jin, B. Straight Gait Research of a Small Electric Hexapod Robot. Appl. Sci. 2021, 11, 3714. https://doi.org/10.3390/app11083714
Zhang F, Zhang S, Wang Q, Yang Y, Jin B. Straight Gait Research of a Small Electric Hexapod Robot. Applied Sciences. 2021; 11(8):3714. https://doi.org/10.3390/app11083714
Chicago/Turabian StyleZhang, Feng, Shidong Zhang, Qian Wang, Yujie Yang, and Bo Jin. 2021. "Straight Gait Research of a Small Electric Hexapod Robot" Applied Sciences 11, no. 8: 3714. https://doi.org/10.3390/app11083714
APA StyleZhang, F., Zhang, S., Wang, Q., Yang, Y., & Jin, B. (2021). Straight Gait Research of a Small Electric Hexapod Robot. Applied Sciences, 11(8), 3714. https://doi.org/10.3390/app11083714