
Novel Coordinated Control Strategy of BESS and PMSG-WTG for Fast Frequency Response



Abstract
:1. Introduction
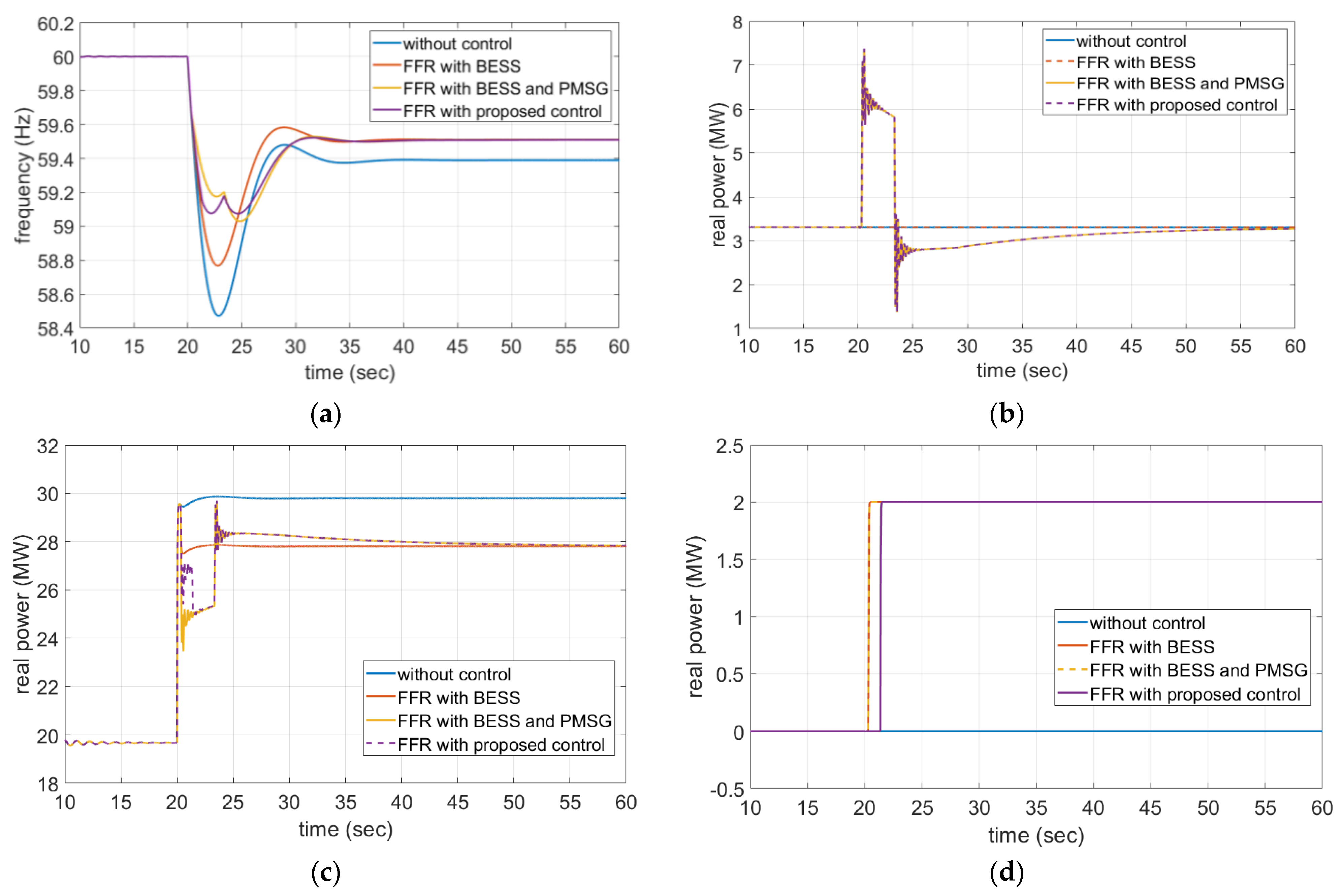
- The conventional FFR control does not use energy efficiently from the viewpoint of the frequency nadir because various energy sources are activated simultaneously. In addition, a second frequency nadir may occur, which may reduce the frequency stability. Thus, a novel coordinated control strategy was proposed to improve the nadir frequency by using energy more efficiently than the conventional FFR control.
- FFR has a very fast response; even a small delay will affect the results. Therefore, IBR activation delay, frequency detection delay, and communication delay were applied to the simulation to reflect the actual characteristics of the IBRs.
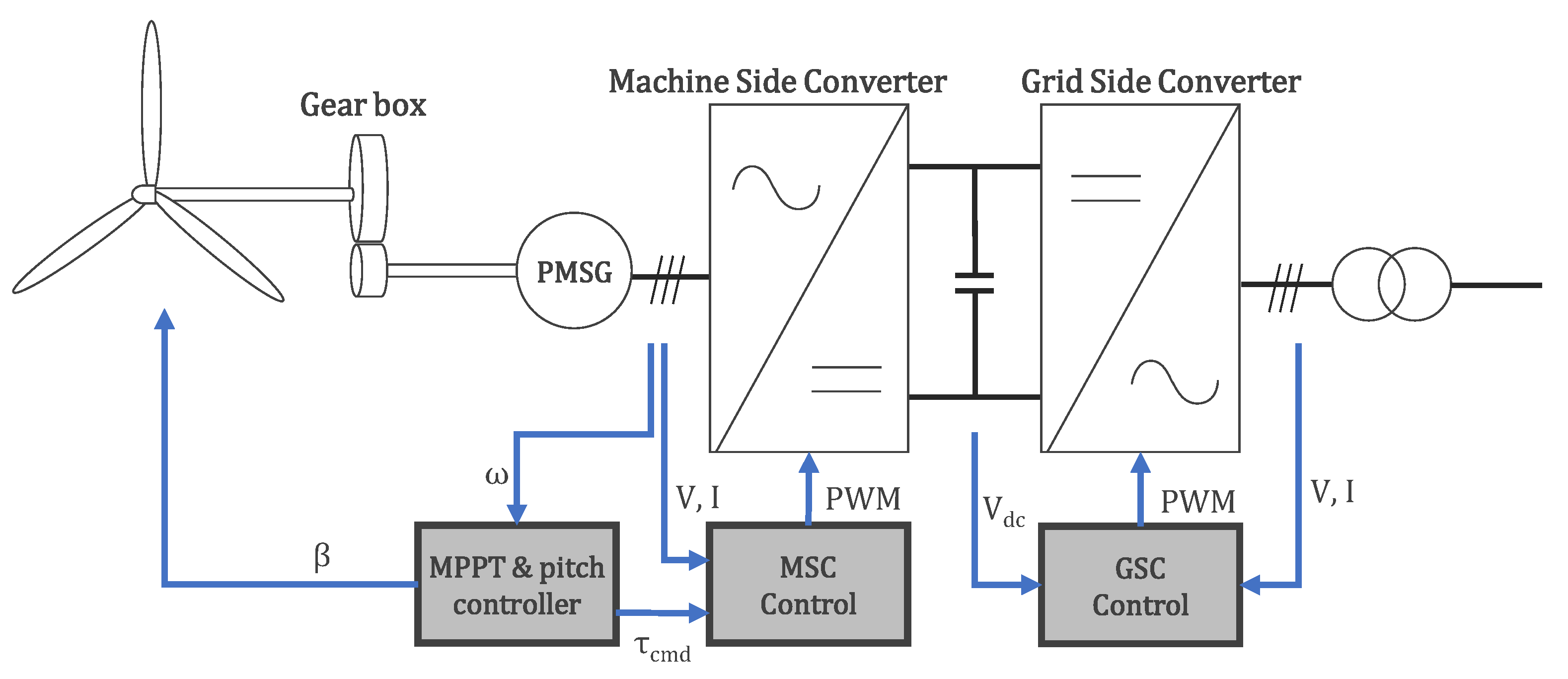
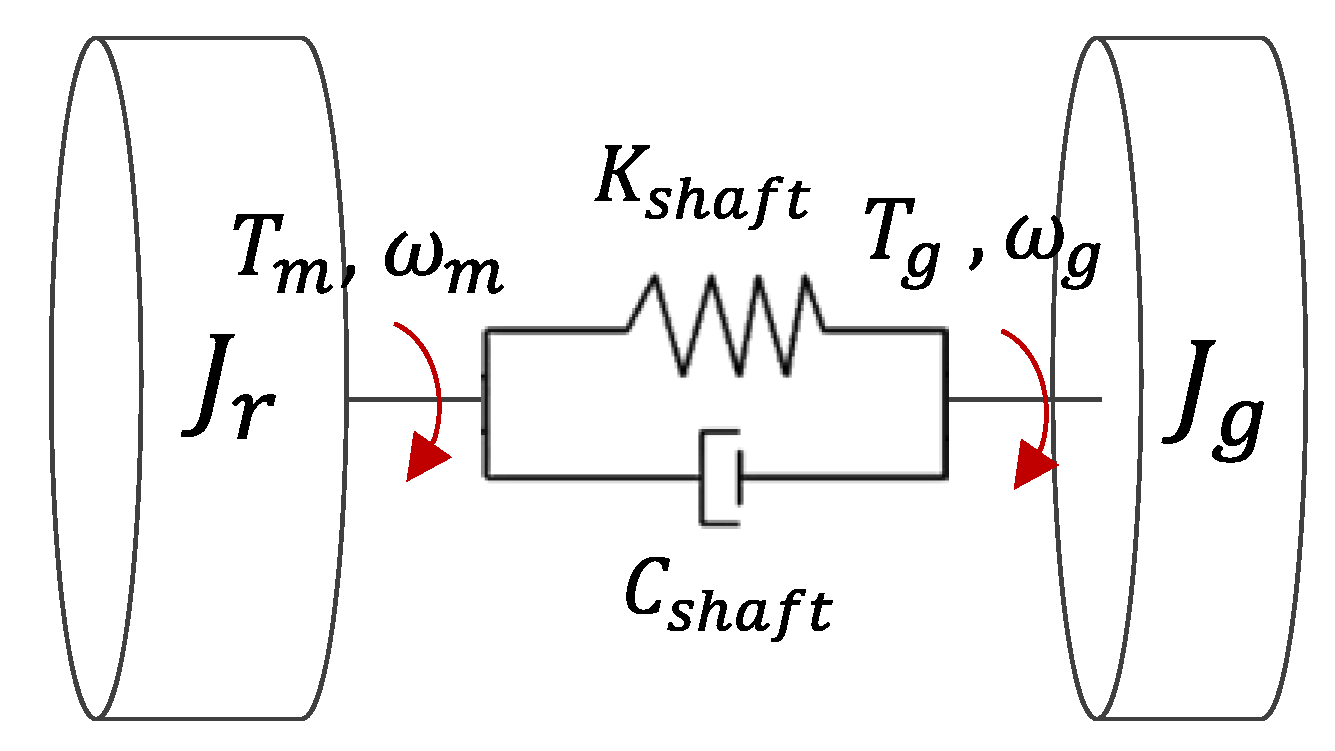
2. Modeling of PMSG
2.1. Wind Turbine Model
2.2. Control Scheme of the Machine Side Converter
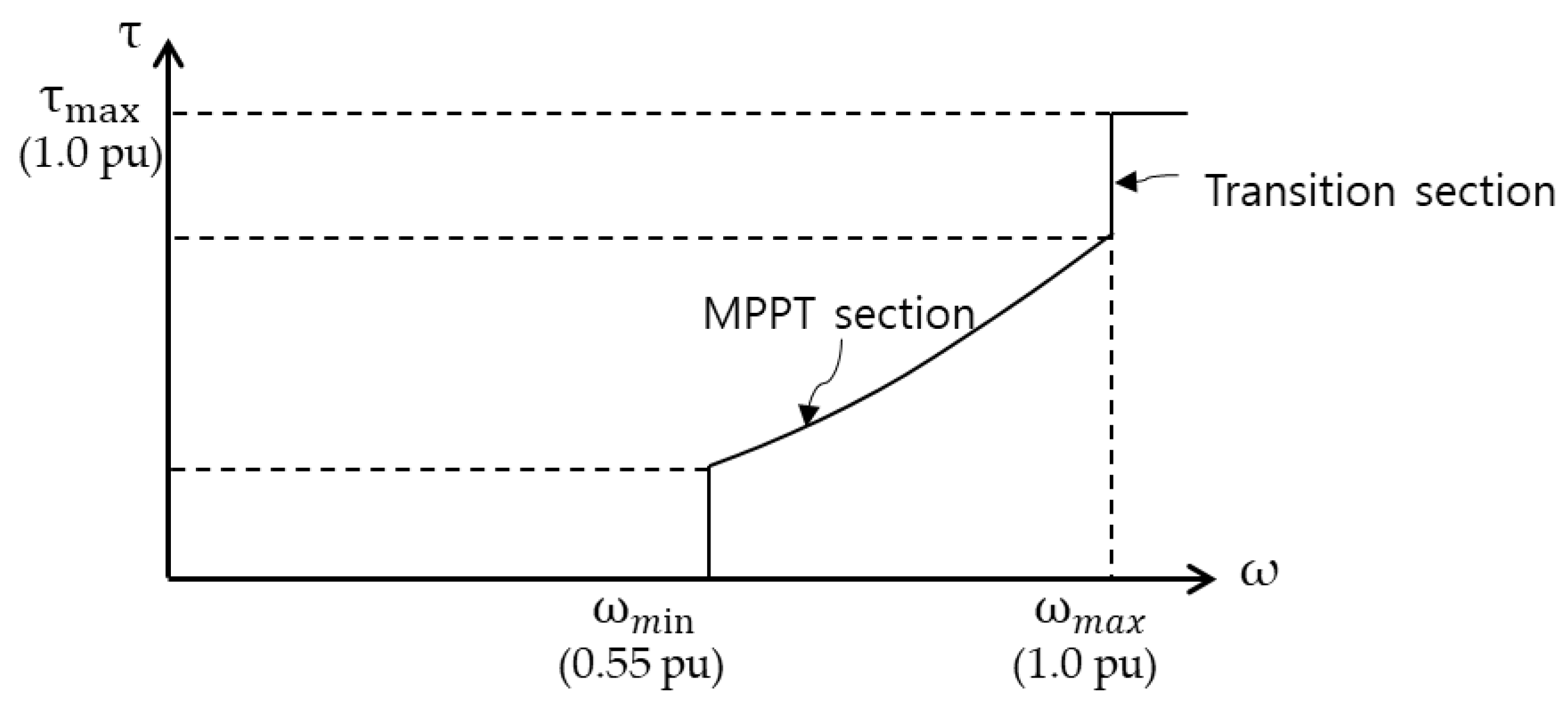
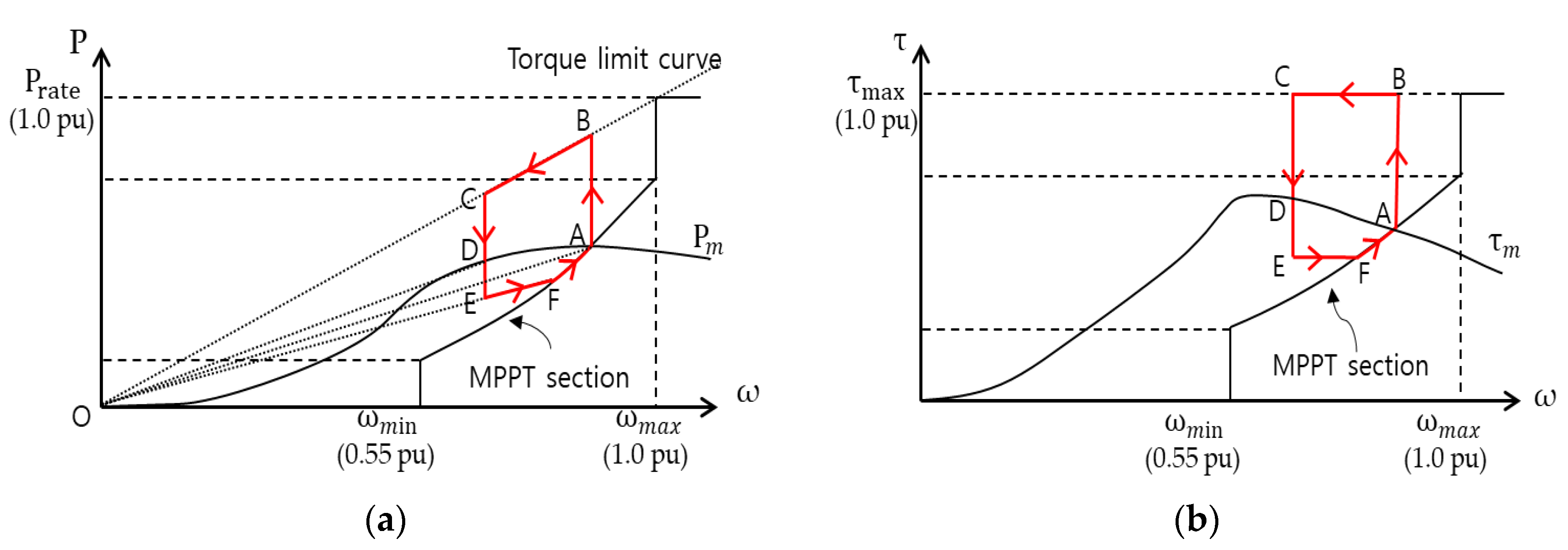
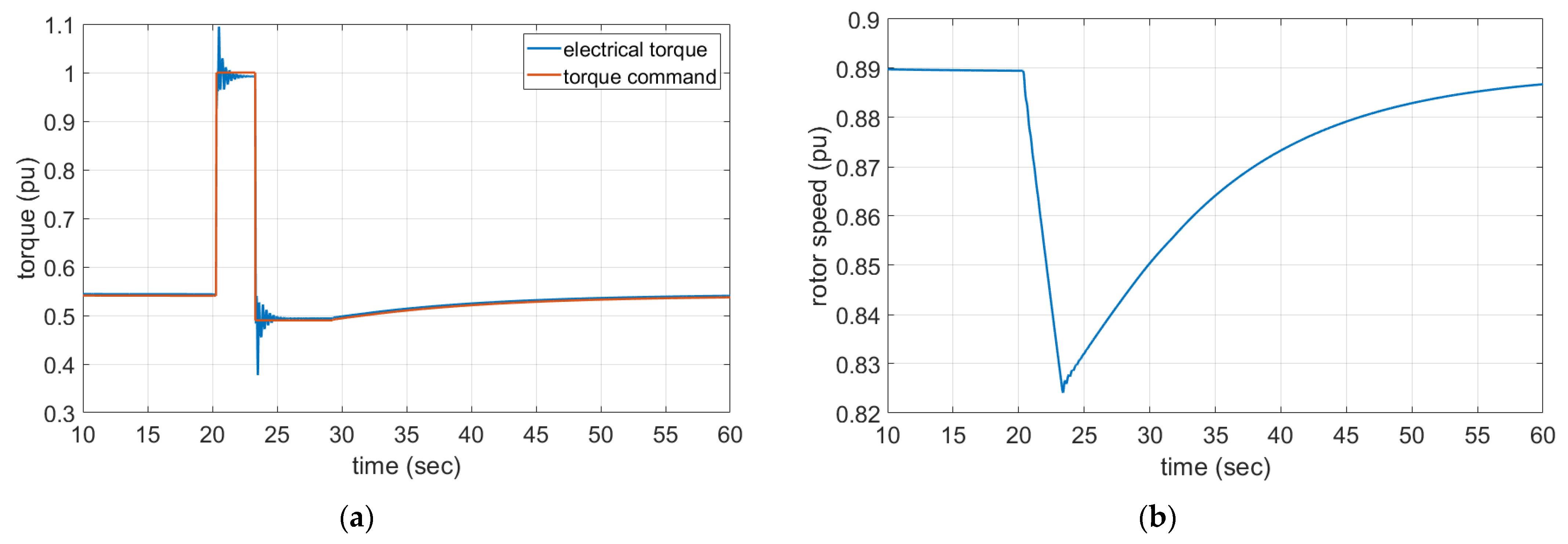
2.3. Torque Limit Control of PMSG
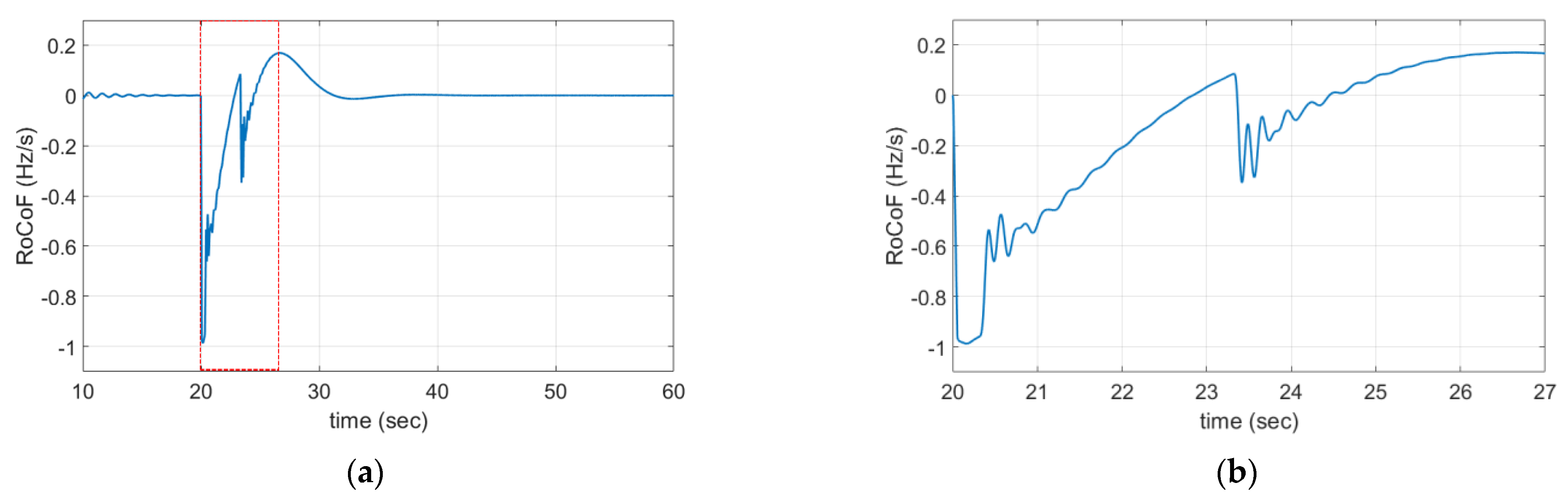
3. Control Strategy in Fast Frequency Response
3.1. Fast Frequency Response
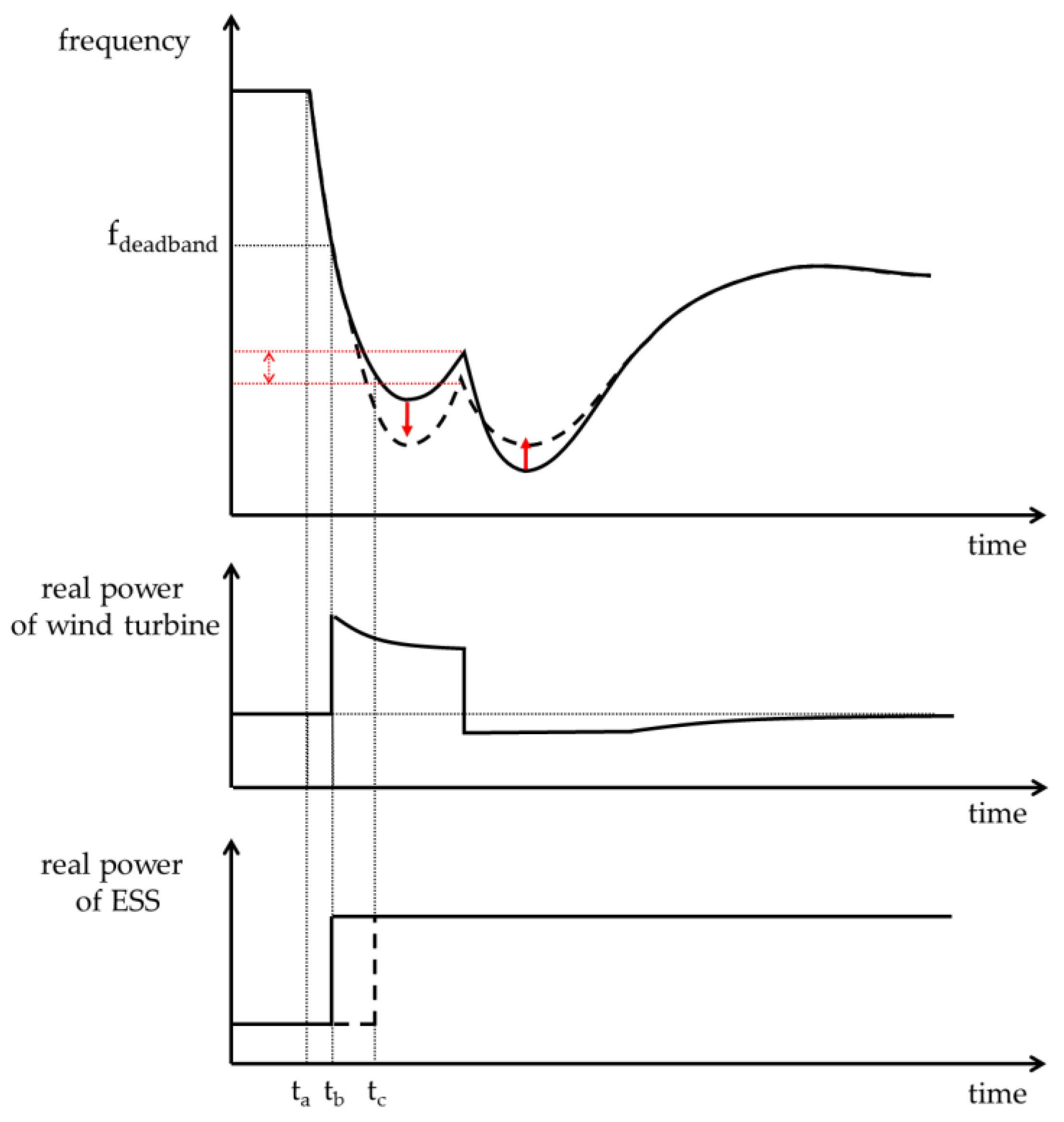
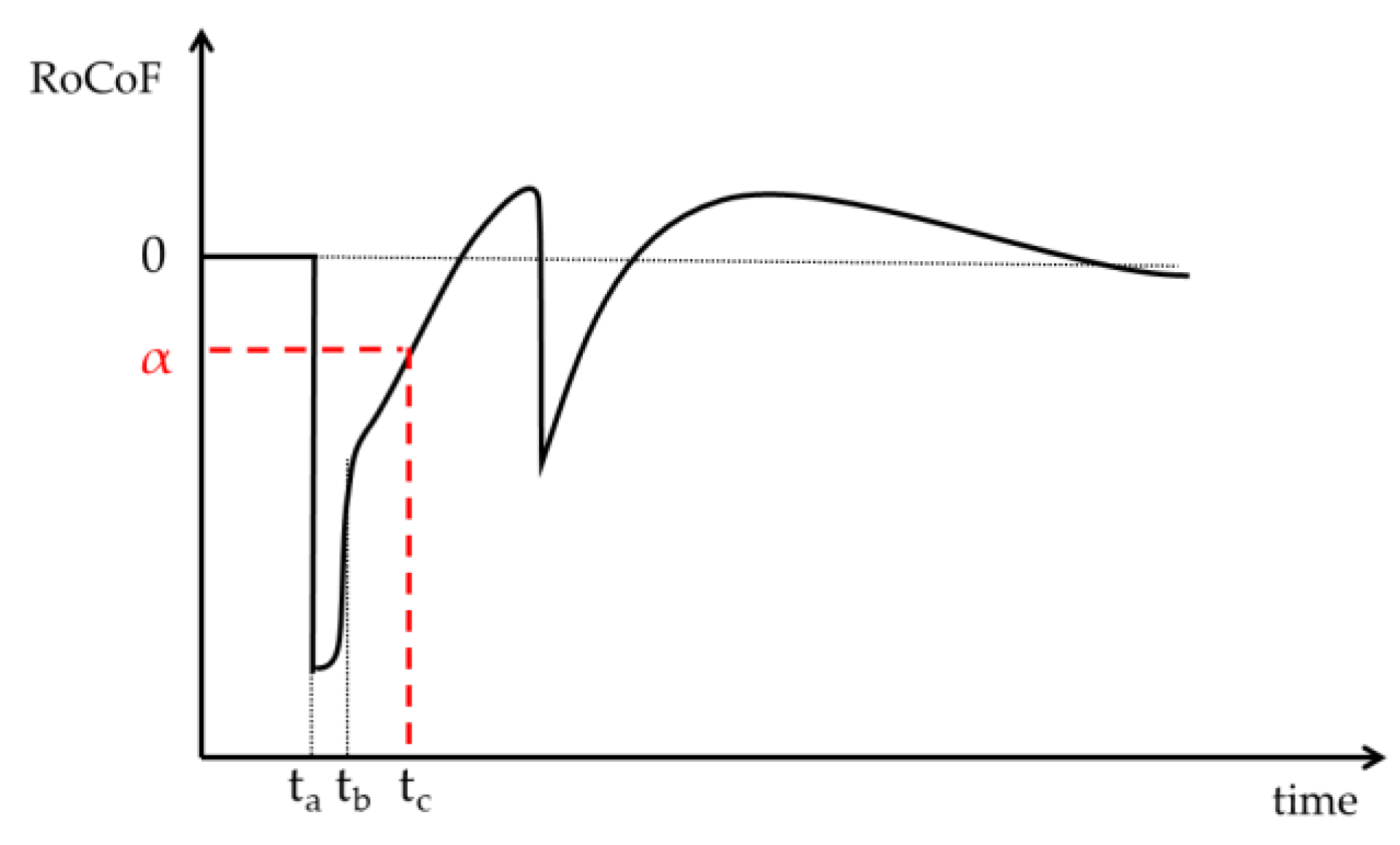
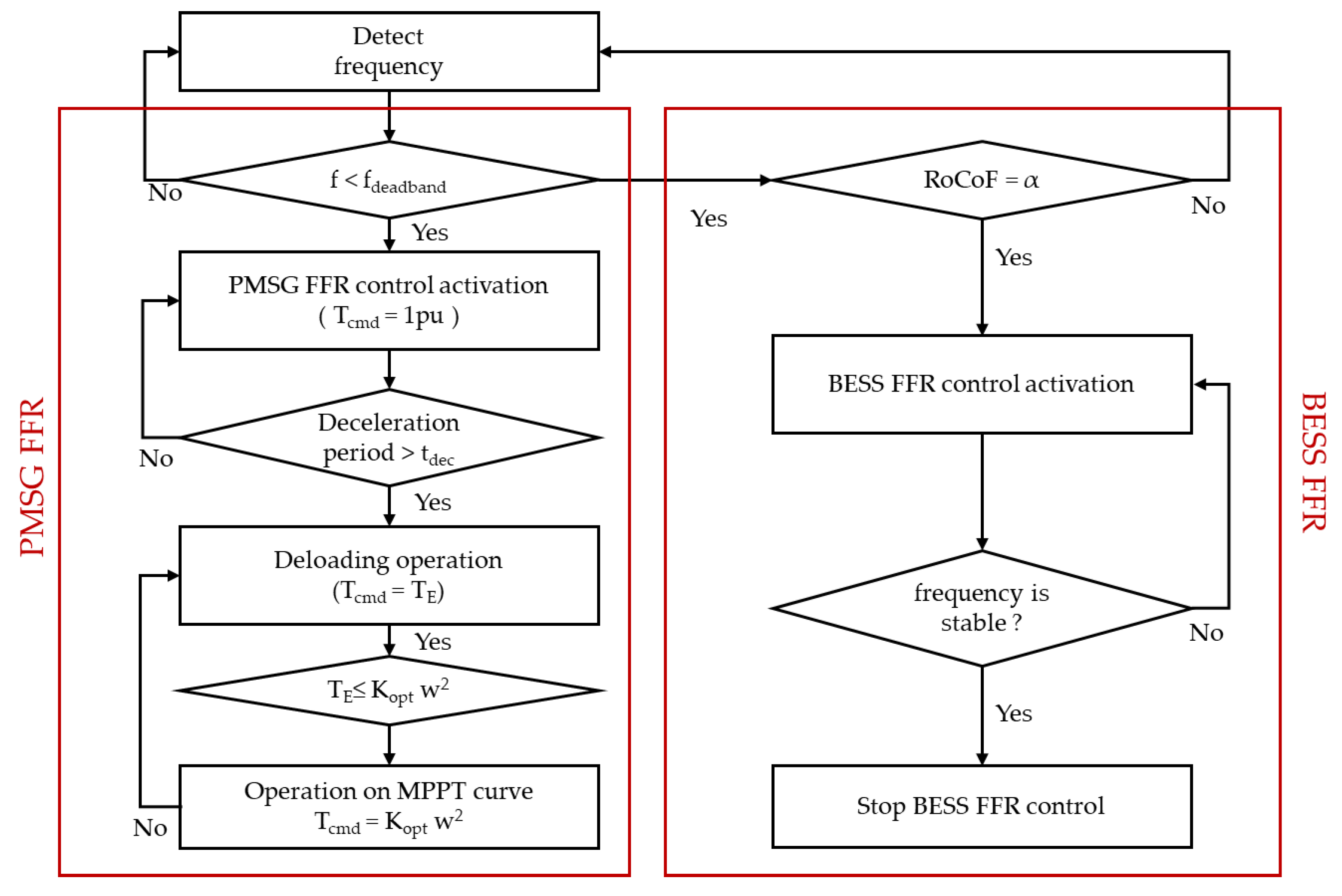
3.2. Novel Coordinated Control Strategy (NCCS)
4. Test System and Simulation Results
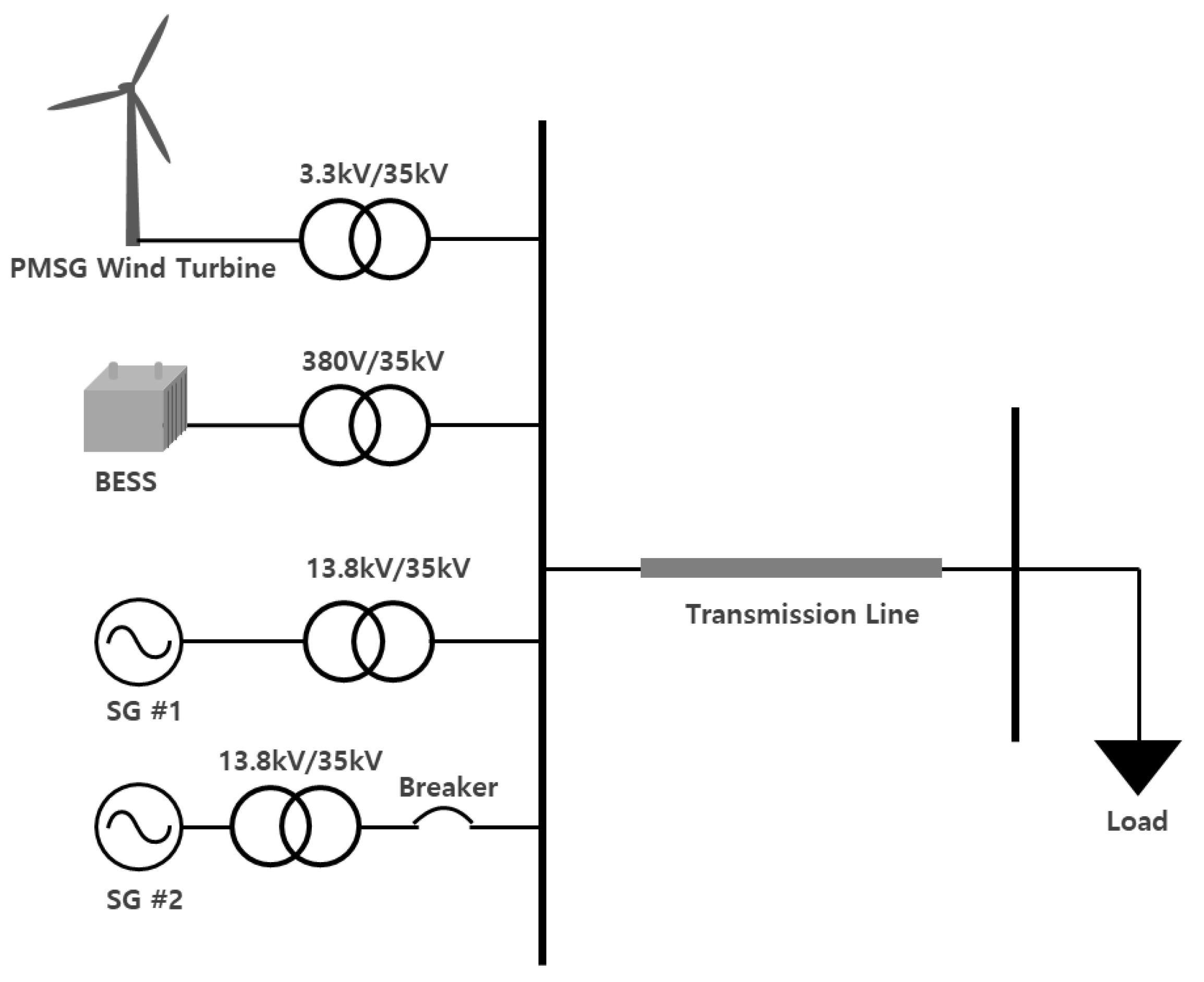
4.1. Configuration of Test System
4.2. Simulation Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yoo, Y.; Jung, S.; Kang, S.; Song, S.; Lee, J.; Han, C.; Jang, G. Dispatchable Substation for Operation and Control of Renewable Energy Resources. Appl. Sci. 2020, 10, 7938. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, J.; Yoon, M.; Jang, G. Energy Storage System Event-Driven Frequency Control Using Neural Networks to Comply with Frequency Grid Code. Energies 2020, 13, 1657. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Liu, T.; Wang, S.; Dong, Y.; Chen, Z. Comprehensive Coordinated Control Strategy of PMSG-Based Wind Turbine for Providing Frequency Regulation Services. IEEE Access 2019, 7, 63944–63953. [Google Scholar] [CrossRef]
- Kang, M.; Kim, K.; Muljadi, E.; Park, J.; Kang, Y.C. Frequency Control Support of a Doubly-Fed Induction Generator Based on the Torque Limit. IEEE Trans. Power Syst. 2016, 31, 4575–4583. [Google Scholar] [CrossRef]
- Lyu, X.; Zhao, J.; Jia, Y.; Xu, Z.; Wong, K.P. Coordinated Control Strategies of PMSG-Based Wind Turbine for Smoothing Power Fluctuations. IEEE Trans. Power Syst. 2019, 34, 391–401. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Wong, K.P. Advanced Control Strategies of PMSG-Based Wind Turbines for System Inertia Support. IEEE Trans. Power Syst. 2017, 32, 3027–3037. [Google Scholar] [CrossRef]
- Yang, D.; Kim, J.; Kang, Y.C.; Muljadi, E.; Zhang, N.; Hong, J.; Song, S.H.; Zheng, T. Temporary Frequency Support of a DFIG for High Wind Power Penetration. IEEE Trans. Power Syst. 2018, 33, 3428–3437. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, W.; Wang, X.; Kang, M.; Hwang, M.; Kang, Y.C.; Gevogian, V.; Muljadi, E. Improved inertial control for permanent magnet synchronous generator wind turbine generators. IET Renew. Power Gener. 2016, 10, 1366–1373. [Google Scholar] [CrossRef]
- Liu, K.; Qu, Y.; Kim, H.; Song, H. Avoiding Frequency Second Dip in Power Unreserved Control During Wind Power Rotational Speed Recovery. IEEE Trans. Power Syst. 2018, 33, 3097–3106. [Google Scholar] [CrossRef]
- Yan, W.; Cheng, L.; Yan, S.; Gao, W.; Gao, D.W. Enabling and Evaluation of Inertial Control for PMSG-WTG Using Synchronverter With Multiple Virtual Rotating Masses in Microgrid. IEEE Trans. Sustain. Energy 2020, 11, 1078–1088. [Google Scholar] [CrossRef]
- Heier, S. Grid Integration of Wind Energy, 3rd ed.; John Wiley & Sons: Chichester, UK, 2014; pp. 43–44. [Google Scholar]
- Fast Frequency Response Concepts and Bulk Power System Reliability Needs. In NERC Inverter-Based Resource Performance Task Force; NERC: Atlanta, GA, USA, 2020.
- Technology Capabilities for Fast Frequency Response. GE Energy Consulting. 2017. Available online: https://www.aemo.com.au/-/media/files/electricity/nem/security_and_reliability/reports/2017/20170310-ge-ffr-advisory-report.pdf?la=en (accessed on 24 April 2021).
- Working Group Prime Mover and Energy Supply. Hydraulic turbine and turbine control models for system dynamic studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [CrossRef]
- Working Group on Prime Mover and Energy Supply Models for System Dynamic Performance Studies. Dynamic models for fossil fueled steam units in power system studies. IEEE Trans. Power Syst. 1991, 6, 753–761. [Google Scholar] [CrossRef]
- Singh, M.; Santoso, S. Dynamic Models for Wind Turbines and Wind Power Plants; NERL: Denver, CO, USA, 2011.
- Shim, J.W.; Verbic, G.; Kim, H.; Hur, K. On Droop Control of Energy-Constrained Battery Energy Storage Systems for Grid Frequency Regulation. IEEE Access 2019, 7, 166353–166364. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, D.W.; Zhang, H.; Yan, S.; Wang, X. Coordinated Control Strategy of Battery Energy Storage System and PMSG-WTG to Enhance System Frequency Regulation Capability. IEEE Trans. Sustain. Energy 2017, 8, 1330–1343. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resources | Wind Turbine | Lithium Batteries | Flow Batteries | Lead-Acid Batteries | Flywheel | Super Capacitor | HVDC |
|---|---|---|---|---|---|---|---|
| Activate (fully activate) | 40 ms (500 ms) | 10–20 ms | 10–20 ms | 40 ms | ≤4 ms | 10–20 ms | 50–500 ms |
| Detection Type | Measure & Identify | Signal |
|---|---|---|
| Frequency direct detection | ≤2–3 cycles | ≒1 cycle |
| (33–50 ms) | (8 ms) | |
| RoCoF detection | ≒2–3 cycles | ≒1cycle |
| (33–50 ms) | (8 ms) | |
| Local RoCoF/frequency measurement | ≥5 cycles | - |
| (83 ms) |
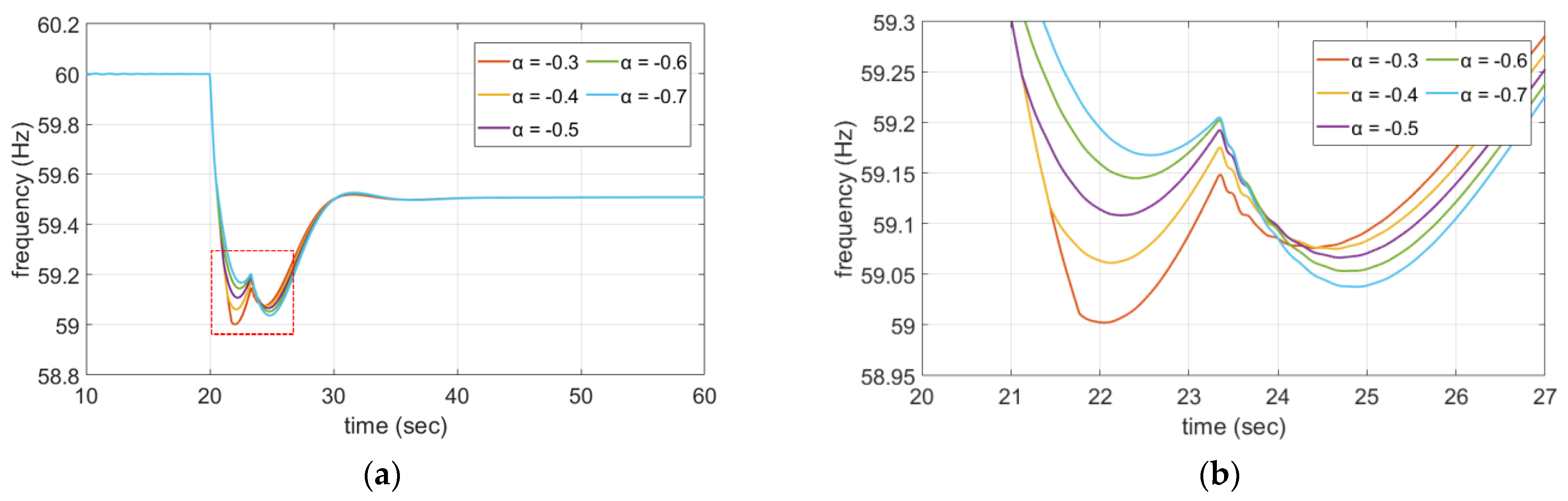
| α | −0.3 | −0.4 | −0.45 | −0.5 | −0.6 | −0.7 |
|---|---|---|---|---|---|---|
| 1st nadir | 59.0025 | 59.0615 | 59.0751 | 59.1086 | 59.1452 | 59.1680 |
| 2nd nadir | 59.0761 | 59.0754 | 59.0735 | 59.0667 | 59.0535 | 59.0379 |
| Methods | Without Control | FFR with Only BESS | FFR with BESS and PMSG | FFR with NCCS |
|---|---|---|---|---|
| Frequency nadir (Hz) | 58.4703 | 58.7687 | 59.0283 | 59.0735 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Lee, J.; Lee, J.; Jang, G. Novel Coordinated Control Strategy of BESS and PMSG-WTG for Fast Frequency Response. Appl. Sci. 2021, 11, 3874. https://doi.org/10.3390/app11093874
Kim H, Lee J, Lee J, Jang G. Novel Coordinated Control Strategy of BESS and PMSG-WTG for Fast Frequency Response. Applied Sciences. 2021; 11(9):3874. https://doi.org/10.3390/app11093874
Chicago/Turabian StyleKim, Hyunwook, Junghun Lee, Jaehyeong Lee, and Gilsoo Jang. 2021. "Novel Coordinated Control Strategy of BESS and PMSG-WTG for Fast Frequency Response" Applied Sciences 11, no. 9: 3874. https://doi.org/10.3390/app11093874
APA StyleKim, H., Lee, J., Lee, J., & Jang, G. (2021). Novel Coordinated Control Strategy of BESS and PMSG-WTG for Fast Frequency Response. Applied Sciences, 11(9), 3874. https://doi.org/10.3390/app11093874