
Advanced Development of Sensors’ Roles in Maritime-Based Industry and Research: From Field Monitoring to High-Risk Phenomenon Measurement



Abstract
:1. Introduction
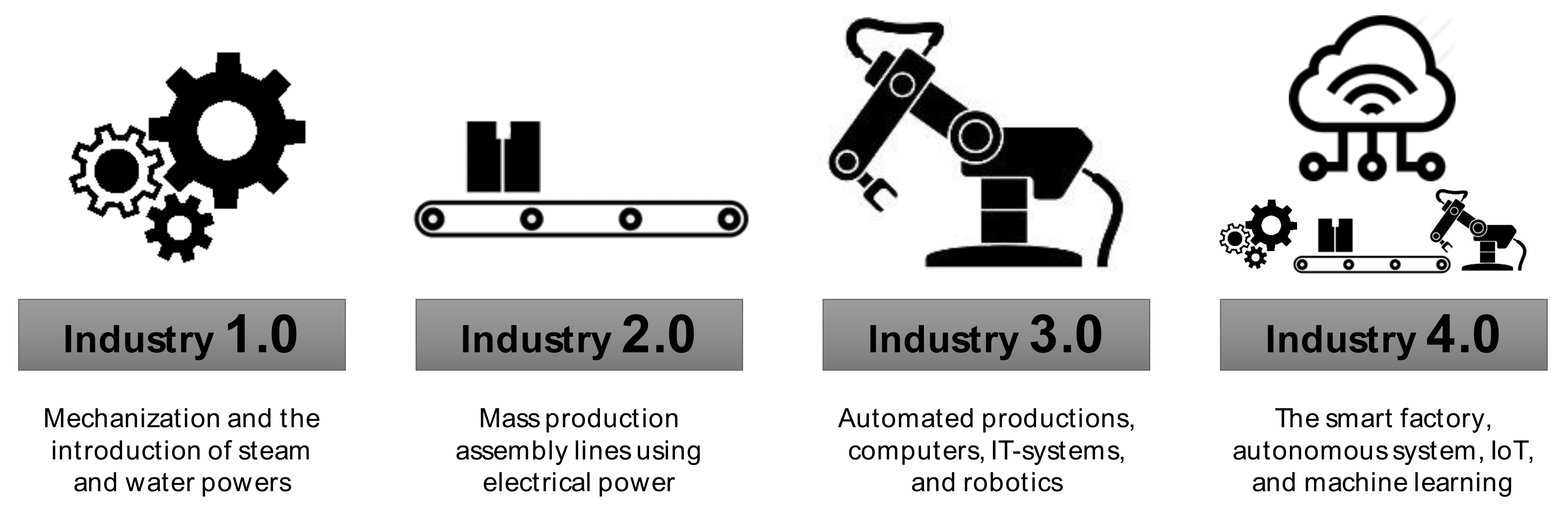
- The First Industrial Revolution [16,17,18,19,20] began in the 18th century through steam power and production mechanization. Compared to thread production on simple spinning wheels, the mechanized version achieved eight times the volume in the same amount of time. Its use for industrial purposes was the most remarkable breakthrough for advancing humanity. Instead of weaving looms powered by muscle, steam engines could be used for power.
- The Third Industrial Revolution began with the first computer era [26,27,28,29,30]. These early computers were often very simple, unwieldy, and incredibly large relative to the computing power they were able to provide, but they laid the groundwork for the world today, which one is hard-pressed to imagine without computer technology. Around 1970, the Third Industrial Revolution involved electronics and IT (information technology) in furthering automation in production. In the early 2000s, computational instruments grew rapidly, which were followed by the development of numerical analysis, e.g., the finite element method (FEM) [31,32,33,34,35] and computational fluid dynamics (CFD) [36,37,38,39,40]. These have been continuously deployed and improved, especially for the calculation of complex phenomena.

2. Applied Sensor Engineering in Logistic and Shipping Activities

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Initiative or Regulation |
|---|---|
| 1914 | Safety of Life at Sea (SOLAS): Ship design and life-saving equipment |
| 1929 | First international conference to consider hull subdivision regulations |
| 1948 | The International Maritime (Consultative) Organization (IMO) is set up as a United Nations agency |
| 1966 | Load Line Convention: Maximum loading and hull strength |
| Rules of the road | |
| The International Association of Classification Societies (IACS): Harmonization of classification rules and regulations | |
| 1969 | Tonnage Convention |
| 1972 | International Convention on the International Regulations for Preventing Collisions at Sea (COLREG) |
| 1974 | IMO resolution on probabilistic analysis of hull subdivision |
| 1973 | Marine Pollution Convention (MARPOL 73) |
| 1978 | International Convention on Standards for Training, Certification and Watchkeeping for Seafarers (STCW) |
| 1979 | International Convention on Maritime Search and Rescue (SAR) |
| 1988 | The Global Maritime Distress and Safety System (GMDSS) |




3. Hydrodynamic Characterization of Designed Hulls
4. Advanced Machinery Performance Monitoring
5. Arctic-Based Field Observations
6. Vibration-Based Damage Detection on Offshore Structures
7. Corrosion Control and Monitoring
8. Impact and Shock Measurements on Critical Structures
- The first group (E𝑆 and E𝐹) was defined as the state related to the construction process while the hull was still in form with a boat shape, and the part with embedded FBG sensors was manufactured.
- The second group (R, B10ℎ, and B80ℎ) was arranged to represent a finished boat mounted in a boat trailer.
9. Concluding Remarks
- In terms of logistic and shipping activities, sensors are heavily involved to ensure that the pathway and sailing route of a ship/vessel are correct and clear to avoid collision or other accidents. The frequently used tools include high-resolution satellite imagery, enhanced spatio-spectral techniques, multi-polarization synthetic aperture radar (SAR), multilayer fusion light-head detectors (MFLHDs), and multiscale Wasserstein auxiliary classifier and generative adversarial networks (MW-ACGANs). These were then varied into global navigation satellite systems (GNSSs), inertial measurement units (IMU)s, Doppler velocity log (DVL), spectral entropy (SE), and C0 complexity in early 2021.
- The hydrodynamic characteristics of marine design and structure are critical aspects that need to be accurately estimated. A sensor-based instrument is recorded for six degrees of freedom, resistance/drag, and propulsion performance. As concluded from the review, the subject of investigation is not only conventional ships, but also vessels with special purposes, i.e., cruise ship, sailing yacht, and underwater cleaning robot. It was also noted in certain works that sensors are deployed for measuring noise in the underwater territory. This contributes to an effort to quantify the effect of noise radiation on mammals’ communication waves.
- Regarding ship/vessel design, energy-saving characteristics have been assessed on machinery monitoring systems. Methodologies for designing sensors and measuring this phenomenon include first-principle safety analysis, hazard and operability studies (HAZOP), fault tree analysis (FTA), wireless sensor network (WSN), structural risk assessment (SRA), machinery risk assessment (MRA) tools, acoustic emission sensors, and laser heads clocked at 16 MHz. The evaluation of vibration interference in recorded motion data in the ice field territory is the interdisciplinary research of this field (hydrodynamic) and the polar science field.
- Besides hull performance, machinery safety must also be evaluated from a sustainability point of view to either avoid loss in fuel consumption or environmental pollution. The summarized research indicates that machinery safety does not solely concern machine performance, but also concerns refraining the subject from undergoing physical damage (e.g., collision damage, hull joint failure, and unpredicted behavior of anisotropic material). Therefore, the collision avoidance concept has been necessarily developed based on the beam search algorithm (BSA), followed by the deployment of laser vibrometry and a displacement laser sensor to quantify defects on the hull joint. In the case of anisotropic materials, a study was performed on polymer composites using acoustic emission Kolmogorov–Sinai (K–S) metric entropy.
- Exploring the Arctic territory is the most addressed concern in terms of polar science and arctic engineering using sensor-based apparatus. For the past decade, works in this field have been dominated by the dedication to observing environmental conditions (of the ocean, atmospheric, and tundra areas), primarily when climate change arises due to an excessive amount of fossil fuel consumption. In recent years, the study has extended to evaluate problems such as the ice melting phenomenon. This work has been carried out especially near Canada and Greenland. Furthermore, autonomous frequency-modulated continuous-wave (FMCW) radar has been used to measure states of snowpack and ice levels.
- Concern regarding offshore structure risk was summarized by assessing sensors’ roles in damage detection, especially against vibration loadings. A fundamental conclusion regarding damage detection is that the sensor-based apparatus set consisting of four wired accelerometers and eight strain gauges, a hydraulic actuator, a computer (DAQ system and Labview), and a 407-controller is more reliable in estimating the damage of diagonal members based on an experiment on a scaled jacket platform. In 2021, a study of damage detection using CA-YD-108 acceleration sensors found good results from the scaled-based model and the in situ measurement.
- Besides vibration, corroded steel and other marine structure parts are considered the origin of further catastrophic damage and loss. The demand to estimate this phenomenon has been fulfilled by a series of studies using various sensor instruments. On offshore platforms, optical fiber-based salinity sensors based on multimode plastic optical fiber (POF) have been used. In additional to commercial sensors (including image data harvesting using a camera for observation), developed ones, such as the tilted fiber Bragg grating (TFBG) concept, are being adopted to design customized sensors.
- Impact and shock are addressed as important design parameters in any marine structure in which numerous scenarios may occur and inflict direct damage to the structure. In the studies, force pressure sensors, displacement gauges, high-speed cameras (e.g., Photron-Fastcam-SA1 series), accelerometers, and DAQ systems are the principal sensor-based tools used to measure design performance against impact and shock (widely known as crashworthy design). It is noted that the current technology is good enough to obtain reliable measurement of data of these phenomena. Nevertheless, an argument is raised regarding an area for improvement: measurement sensors are susceptible to impact and shock, which means that the accuracy of measurements can sometimes be questionable. Besides impact and shock, structure debris may also disturb the data recording. Thus, there is a challenge to design a buffer sensor that is strong enough to withstand such loadings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Nosheen, S.; Haq, N.U.; Gao, X. Value creation during fourth industrial revolution: Use of intellectual capital by most innovative companies of the world. Technol. Forecast. Soc. Chang. 2021, 163, 120479. [Google Scholar] [CrossRef]
- Neto, R.D.C.S.; Maia, J.S.; Neiva, S.D.S.; Scalia, M.D.; Guerra, J.B.S.O.D.A. The fourth industrial revolution and the coronavirus: A new era catalyzed by a virus. Res. Glob. 2020, 2, 100024. [Google Scholar]
- Cowie, P.; Townsend, L.; Salemink, K. Smart rural futures: Will rural areas be left behind in the 4th industrial revolution? J. Rural Stud. 2020, 79, 169–176. [Google Scholar] [CrossRef]
- Ćwiklicki, M.; Klich, J.; Chen, J. The adaptiveness of the healthcare system to the fourth industrial revolution: A preliminary analysis. Futures 2020, 122, 102602. [Google Scholar] [CrossRef]
- Krafft, M.; Sajtos, L.; Haenlein, M. Challenges and Opportunities for Marketing Scholars in Times of the Fourth Industrial Revolution. J. Interact. Mark. 2020, 51, 1–8. [Google Scholar] [CrossRef]
- Ebekozien, A.; Aigbavboa, C. COVID-19 recovery for the Nigerian construction sites: The role of the fourth industrial revolution technologies. Sustain. Cities Soc. 2021, 69, 102803. [Google Scholar] [CrossRef]
- Dogaru, L. The Main Goals of the Fourth Industrial Revolution. Renewable Energy Perspectives. Proc. Manuf. 2020, 46, 397–401. [Google Scholar] [CrossRef]
- Min, J.; Kim, Y.; Lee, S.; Jang, T.W.; Kim, I.; Song, J. The Fourth Industrial Revolution and Its Impact on Occupational Health and Safety, Worker’s Compensation and Labor Conditions. Saf. Health Work 2019, 10, 400–408. [Google Scholar] [CrossRef]
- Zunino, C.; Valenzano, A.; Obermaisser, R.; Petersen, S. Factory Communications at the Dawn of the Fourth Industrial Revolution. Comput. Stand. Interface 2020, 71, 103433. [Google Scholar] [CrossRef]
- Fitzgerald, E.; Piór, M.; Tomaszewski, A. Network lifetime maximization in wireless mesh networks for machine-to-machine communication. Ad Hoc Netw. 2019, 95, 101987. [Google Scholar] [CrossRef] [Green Version]
- Montori, F.; Bedogni, L.; Di Felice, M.; Bononi, L. Machine-to-machine wireless communication technologies for the Internet of Things: Taxonomy, comparison and open issues. Pervasive Mob. Comput. 2018, 50, 56–81. [Google Scholar] [CrossRef]
- Bruns, R.; Dunkel, J.; Masbruch, H.; Stipkovic, S. Intelligent M2M: Complex event processing for machine-to-machine communication. Expert Syst. Appl. 2015, 42, 1235–1246. [Google Scholar] [CrossRef]
- Xu, B.; Li, C. Influencing factors of college students’ entrepreneurial ecosystem based on the internet of things and embedded systems. Microprocess. Microsyst. 2021, 81, 103694. [Google Scholar] [CrossRef]
- Li, X.; Lu, Y.; Fu, X.; Qi, Y. Building the Internet of Things platform for smart maternal healthcare services with wearable devices and cloud computing. Future Gener. Comput. Syst. 2021, 118, 282–296. [Google Scholar] [CrossRef]
- Malik, P.K.; Sharma, R.; Singh, R.; Gehlot, A.; Satapathy, S.C.; Alnumay, W.S.; Pelusi, D.; Ghosh, U.; Nayak, J. Industrial Internet of Things and its Applications in Industry 4.0: State of The Art. Comput. Commun. 2021, 166, 125–139. [Google Scholar] [CrossRef]
- Trew, A. Spatial takeoff in the first industrial revolution. Rev. Econ. Dyn. 2014, 17, 707–725. [Google Scholar] [CrossRef] [Green Version]
- Bruland, K.; Smith, K. Assessing the role of steam power in the first industrial revolution: The early work of Nick von Tunzelmann. Res. Policy 2013, 42, 1716–1723. [Google Scholar] [CrossRef]
- Bottomley, S. In Patenting in England, Scotland and Ireland during the Industrial Revolution, 1700–1852. Explor. Econ. Hist. 2014, 54, 48–63. [Google Scholar] [CrossRef] [Green Version]
- Jones, E. Space, sound and sedition on the Royal Naval ship, 1756–1815. J. Hist. Geogr. 2020, 70, 65–73. [Google Scholar] [CrossRef]
- Hirschman, C.; Mogford, E. Immigration and the American industrial revolution from 1880 to 1920. Soc. Sci. Res. 2009, 38, 897–920. [Google Scholar] [CrossRef] [Green Version]
- Iyer, A. Moving from Industry 2.0 to Industry 4.0: A case study from India on leapfrogging in smart manufacturing. Proc. Manuf. 2018, 21, 663–670. [Google Scholar] [CrossRef]
- Kennedy, C. The energy embodied in the first and second industrial revolution. J. Ind. Ecol. 2020, 24, 887–898. [Google Scholar] [CrossRef]
- Dillistone, F.W. Britain and the Second Industrial Revolution. Theol. Today 1956, 13, 11–17. [Google Scholar] [CrossRef]
- Tweedale, G. Marketing in the Second Industrial Revolution: A Case Study of the Ferranti Computer Group, 1949–1963. Bus. Hist. 1992, 34, 96–127. [Google Scholar] [CrossRef]
- Florida, R. The new industrial revolution. Futures 1991, 23, 559–576. [Google Scholar] [CrossRef]
- Guerado, E. Scientific societies and the third industrial revolution—The future role of the OTC. Injury 2017, 48, S1–S4. [Google Scholar] [CrossRef]
- Fitzsimmons, J. Information technology and the third industrial revolution. Electron. Libr. 1994, 12, 295–297. [Google Scholar] [CrossRef]
- Glasnovic, Z.; Margeta, K.; Premec, K. Could Key Engine, as a new open-source for RES technology development, start the third industrial revolution? Renew. Sustain. Energy Rev. 2016, 57, 1194–1209. [Google Scholar] [CrossRef]
- Finkelstein, J.; Newman, D. The Third industrial revolution: A special challenge to managers. Organ. Dyn. 1984, 23, 53–65. [Google Scholar] [CrossRef]
- Rifkin, J. How the Third Industrial Revolution Will Create a Green Economy. New Perspect. Quat. 2016, 33, 6–10. [Google Scholar] [CrossRef]
- Huda, N.; Prabowo, A.R. Investigation of Optimum Ply Angle using Finite Element (FE) Approach: References for Technical Application on the Composite Navigational Buoys. Proc. Struct. Integr. 2020, 27, 140–146. [Google Scholar] [CrossRef]
- Ridwan, R.; Prabowo, A.R.; Muhayat, N.; Putranto, T.; Sohn, J.M. Tensile analysis and assessment of carbon and alloy steels using FE approach as an idealization of material fractures under collision and grounding. Curved Layer. Struct. 2020, 7, 188–198. [Google Scholar] [CrossRef]
- Prabowo, A.R.; Cao, B.; Sohn, J.M.; Bae, D.M. Crashworthiness assessment of thin-walled double bottom tanker: Influences of seabed to structural damage and damage-energy formulae for grounding damage calculations. J. Ocean Eng. Sci. 2020, 5, 387–400. [Google Scholar] [CrossRef]
- Ikhsan, I.; Triyono, J.; Prabowo, A.R.; Sohn, J.M. Investigation of Meshing Strategy on Mechanical Behaviour of Hip Stem Implant Design Using FEA. Open Eng. 2020, 10, 769–775. [Google Scholar] [CrossRef]
- Prabowo, A.R.; Bae, D.M.; Sohn, J.M.; Zakki, A.F.; Cao, B. Effects of the rebounding of a striking ship on structural crashworthiness during ship-ship collision. Thin Walled Struct. 2017, 115, 225–239. [Google Scholar] [CrossRef]
- Yusvika, M.; Prabowo, A.R.; Tjahjana, D.D.D.P.; Sohn, J.M. Cavitation Prediction of Ship Propeller Based on Temperature and Fluid Properties of Water. J. Mar. Sci. Eng. 2020, 8, 465. [Google Scholar] [CrossRef]
- Bahatmaka, A.; Kim, D.J.; Prabowo, A.R.; Zaw, M.T. Investigation on the performance of the traditional Indonesian fishing vessel. MATEC Web. Conf. 2018, 159, 02056. [Google Scholar] [CrossRef]
- Nubli, H.; Prabowo, A.R.; Sohn, J.M. Fire Phenomenon of Natural Gas Leak Accidents on the LNG-Fueled Ship Using Computational Fluid Dynamic. In Proceedings of the 39th International Conference on Offshore Mechanics and Arctic Engineering, Online, 3–7 August 2020; American Society of Mechanical Engineers: New York, NY, USA, 2020; Volume 84324, p. V02AT02A066. [Google Scholar]
- Prabowoputra, D.M.; Prabowo, A.R.; Hadi, S.; Sohn, J.M. Assessment of turbine stages and blade numbers on modified 3D Savonius hydrokinetic turbine performance using CFD analysis. Multidiscip. Model. Mater. Struct. 2021, 17, 253–272. [Google Scholar] [CrossRef]
- Bahatmaka, A.; Kim, D.J.; Prabowo, A.R. Numerical Investigation against Laboratory Experiment: An Overview of Damage and Wind Loads on Structural Design. Proc. Struct. Integr. 2020, 27, 6–13. [Google Scholar] [CrossRef]
- Schwab, K. The Fourth Industrial Revolution: What It Means, How to Respond. Available online: https://www.weforum.org/agenda/2016/01/the-fourth-industrial-revolution-what-it-means-and-how-to-respond/ (accessed on 3 March 2021).
- Fotaine, E.; Orsero, P.; Ledoux, A.; Nerzic, R.; Prevosto, M.; Quiniou, V. Reliability analysis and Response Based Design of a moored FPSO in West Africa. Struct. Saf. 2013, 41, 82–96. [Google Scholar] [CrossRef]
- Alexandridis, G.; Kavussanos, M.G.; Kim, C.Y.; Tsouknidis, D.A.; Visvikis, I.D. A survey of shipping finance research: Setting the future research agenda. Transp. Rep. 2018, 115, 164–212. [Google Scholar] [CrossRef]
- Nwafor, N.A.; Walker, T.R. Rethinking marine insurance and plastic pollution: Food for thought. Resour. Conserv. Recycl. 2020, 161, 104950. [Google Scholar] [CrossRef]
- Prabowo, A.R.; Laksono, F.B.; Sohn, J.M. Investigation of structural performance subjected to impact loading using finite element approach: Case of ship-container collision. Curved Layer Struct. 2020, 7, 17–28. [Google Scholar] [CrossRef]
- Finetti, E.S.; Bonet, C.A.; Lapeñ, O.L.; Areny, R.P. Cost-effective autonomous sensor for the long-term monitoring of water electrical conductivity of crop fields. Comput. Electron. Agric. 2019, 165, 104940. [Google Scholar]
- Apicella, V.; Caponero, M.A.; Davino, D.; Visone, C. A magnetostrictive biased magnetic field sensor with geometrically controlled full-scale range. Sens. Actuators A: Phys. 2018, 280, 475–483. [Google Scholar] [CrossRef]
- Kim, S.H.; Umar, A.; Hwang, S.W. Rose-like CuO nanostructures for highly sensitive glucose chemical sensor application. Ceram. Int. 2015, 41, 9468–9475. [Google Scholar] [CrossRef]
- Luyckx, G.; Voet, E.; Lammens, N.; Degrieck, J. Strain Measurements of Composite Laminates with Embedded Fibre Bragg Gratings: Criticism and Opportunities for Research. Sensors 2011, 11, 384–408. [Google Scholar] [CrossRef] [Green Version]
- Pandey, S.K.; Kim, K.H.; Lee, S.H. Use of a Dynamic Enclosure Approach to Test the Accuracy of the NDIR Sensor: Evaluation Based on the CO2 Equilibration Pattern. Sensors 2007, 7, 3459–3471. [Google Scholar] [CrossRef]
- UNCTAD. Review of Maritime Transport 2017; United Nations Publication: Geneva, Switzerland, 2017. [Google Scholar]
- IMO. International Convention for the Safety of Life at Sea (SOLAS); IMO Publications: London, UK, 2010. [Google Scholar]
- Vassalos, D. Shaping Ship Safety: The Face of the Future. Mar. Technol. 1999, 36, 61–76. [Google Scholar]
- Nezlin, N.P.; Weisberg, S.B.; Diehl, D.W. Relative availability of satellite imagery and ship-based sampling for assessment of stormwater runoff plumes in coastal southern California. Estuar. Coast. Shelf Sci. 2007, 71, 250–258. [Google Scholar] [CrossRef]
- Song, P.; Qi, L.; Qian, X.; Lu, X. Detection of ships in inland river using high-resolution optical satellite imagery based on mixture of deformable part models. J. Parallel Distrib. Comput. 2019, 132, 1–7. [Google Scholar] [CrossRef]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef] [PubMed]
- De Maio, A.; Orlando, D.; Pallotta, L.; Clemente, C. A Multifamily GLRT for Oil Spill Detection. IEEE. Geosci. Remote Sens. Lett. 2017, 55, 63–79. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Q.Z.; Zang, F.N. Ship detection for visual maritime surveillance from non-stationary platforms. Ocean Eng. 2017, 141, 53–63. [Google Scholar] [CrossRef]
- Liao, M.S.; Tang, J.; Wang, T.; Balz, T.; Zhang, L. Landslide monitoring with high-resolution SAR data in the Three Gorges region. Sci. China Earth Sci. 2012, 55, 590–601. [Google Scholar] [CrossRef]
- Liu, L.; Gao, Y.; Wang, F.; Liu, X. Real-Time Optronic Beamformer on Receive in Phased Array Radar. IEEE. Geosci. Remote Sens. Lett. 2018, 16, 387–391. [Google Scholar] [CrossRef]
- Zou, L.; Zhang, H.; Wang, C.; Wu, F.; Gu, F. Mw-acgan: Generating multiscale high-resolution SAR images for ship detection. Sensors 2020, 20, 6673. [Google Scholar] [CrossRef]
- Gunnarsson, B. Recent ship traffic and developing shipping trends on the Northern Sea Route—Policy implications for future arctic shipping. Mar. Policy 2021, 124, 104369. [Google Scholar] [CrossRef]
- Pan, Z.; Yang, R.; Zhang, Z. Msr2n: Multi-stage rotational region based network for arbitrary-oriented ship detection in sar images. Sensors 2020, 20, 2340. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, W.; Mao, Y.; Yuan, R.; Liu, Y.; Pu, X.; Li, C. A novel detector based on convolution neural networks for multiscale sar ship detection in complex background. Sensors 2020, 20, 2547. [Google Scholar] [CrossRef] [PubMed]
- Gui, Y.; Li, X.; Xue, L. A multilayer fusion light-head detector for SAR ship detection. Sensors 2019, 19, 1124. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, T.; Zhang, W.; Yang, L.; Wang, Q.; Huang, J.; Yuan, N. Inshore ship detection based on level set method and visual saliency for SAR images. Sensors 2018, 18, 3877. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, G.; Hatta, D.; Guo, X.; Kubo, N. Performance evaluation of IMU and DVL integration in marine navigation. Sensors 2021, 21, 1056. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Li, Y.; Wan, Z.; Yang, Z.; Wang, T.; Guan, K.; Fu, L. Use of AIS data for performance evaluation of ship traffic with speed control. Ocean Eng. 2020, 204, 107259. [Google Scholar] [CrossRef]
- Feng, M.; Shaw, S.-L.; Peng, G.; Fang, Z. Time efficiency assessment of ship movements in maritime ports: A case study of two ports based on AIS data. J. Transp. Geogr. 2020, 86, 102741. [Google Scholar] [CrossRef]
- Tzabiras, G.; Kontogiannis, K. An Integrated Method for Predicting the Hydrodynamic Resistance of Low-CB Ships. CAD Comput. Aided Des. 2010, 42, 985–1000. [Google Scholar] [CrossRef]
- Von Bock und Polach, R.; Ehlers, S. Heave and Pitch Motions of a Ship in Model Ice: An Experimental Study on Ship Resistance and Ice Breaking Pattern. Cold Reg. Sci. Technol. 2011, 68, 49–59. [Google Scholar] [CrossRef]
- Lee, M.H.; Park, Y.D.; Park, H.G.; Park, W.C.; Hong, S.; Lee, K.S.; Chun, H.H. Hydrodynamic Design of an Underwater Hull Cleaning Robot and Its Evaluation. Int. J. Nav. Archit. Ocean Eng. 2012, 4, 335–352. [Google Scholar] [CrossRef] [Green Version]
- Bouscasse, B.; Broglia, R.; Stern, F. Experimental Investigation of a Fast Catamaran in Head Waves. Ocean Eng. 2013, 72, 318–330. [Google Scholar] [CrossRef]
- Jang, J.; Choi, S.H.; Ahn, S.M.; Kim, B.; Seo, J.S. Experimental Investigation of Frictional Resistance Reduction with Air Layer on the Hull Bottom of a Ship. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 363–379. [Google Scholar] [CrossRef] [Green Version]
- Fossati, F.; Bayati, I.; Orlandini, F.; Muggiasca, S.; Vandone, A.; Mainetti, G.; Sala, R.; Bertorello, C.; Begovic, E. A Novel Full Scale Laboratory for Yacht Engineering Research. Ocean Eng. 2015, 104, 219–237. [Google Scholar] [CrossRef] [Green Version]
- Rajendran, S.; Fonseca, N.; Soares, C.G. Prediction of Extreme Motions and Vertical Bending Moments on a Cruise Ship and Comparison with Experimental Data. Ocean Eng. 2016, 127, 368–386. [Google Scholar] [CrossRef]
- Jiao, J.; Ren, H.; Adenya, C.A.; Chen, C. Development of a Shipboard Remote Control and Telemetry Experimental System for Large-Scale Model’s Motions and Loads Measurement in Realistic Sea Waves. Sensors 2017, 17, 2485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carchen, A.; Atlar, M.; Turkmen, S.; Pazouki, K.; Murphy, A.J. Ship Performance Monitoring Dedicated to Biofouling Analysis: Development on a Small Size Research Catamaran. Appl. Ocean Res. 2019, 89, 224–236. [Google Scholar] [CrossRef]
- Kim, D.; Lee, S.; Lee, J. Data-Driven Prediction of Vessel Propulsion Power Using Support Vector Regression with Onboard Measurement and Ocean Data. Sensors 2020, 20, 1588. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.F.; Zhao, D.G.; Guo, C.Y.; Su, Y.M.; Zhong, X.H. Comprehensive Test System for Ship-Model Resistance and Propulsion Performance in Actual Seas. Ocean Eng. 2020, 197, 106915. [Google Scholar] [CrossRef]
- Guo, C.Y.; Zhong, X.H.; Zhao, D.G.; Wang, C.; Lin, J.F.; Song, K.W. Propulsion performance of large-scale ship model in real sea environment. Ocean Eng. 2020, 210, 107440. [Google Scholar] [CrossRef]
- Su, Y.M.; Lin, J.F.; Zhao, D.G.; Guo, C.Y.; Guo, H. Influence of a pre-swirl stator and rudder bulb system on the propulsion performance of a large-scale ship model. Ocean Eng. 2020, 218, 108189. [Google Scholar] [CrossRef]
- Mei, B.; Sun, L.; Shi, G. Full-Scale Maneuvering Trials Correction and Motion Modelling Based on Actual Sea and Weather Conditions. Sensors 2020, 20, 3963. [Google Scholar] [CrossRef] [PubMed]
- Ha, Y.J.; Kim, K.H.; Nam, B.W.; Hong, S.Y.; Kim, H. Experimental Study for Characteristics of Slamming Loads on Bow of a Ship-Type FPSO under Breaking and Irregular Wave Conditions. Ocean Eng. 2021, 224, 108738. [Google Scholar] [CrossRef]
- Allianz. Safety and Shipping Review 2020; Allianz Global Corporate & Specialty: Munich, Germany, 2020. [Google Scholar]
- Paik, B.G.; Cho, S.R.; Park, B.J.; Lee, D.; Yun, J.H.; Bae, B.D. Employment of Wireless Sensor Networks for Full-Scale Ship Application. IFIP Int. Fed. Inf. Process. 2007, 4808, 113–122. [Google Scholar]
- Paik, B.G.; Cho, S.R.; Park, B.J.; Lee, D.; Bae, B.D.; Yun, J.H. Characteristics of wireless sensor network for full-scale ship application. J. Mar. Sci. Technol. 2009, 14, 115–126. [Google Scholar] [CrossRef]
- Penttilä, P.; Ruponen, P. Use of Level Sensors in Breach Estimation for a Damaged Ship. In Proceedings of the 5th International Conference on Collision and Grounding of Ships, Espoo, Finland, 14–16 June 2010; pp. 80–87. [Google Scholar]
- Lazakis, I.; Dikis, K.; Michala, A.L.; Theotokatos, G. Advanced Ship Systems Condition Monitoring for Enhanced Inspection, Maintenance and Decision Making in Ship Operations. Transp. Res. Procedia 2016, 14, 1679–1688. [Google Scholar] [CrossRef] [Green Version]
- Raptodimos, Y.; Lazakis, I.; Theotokatos, G.; Varelas, T.; Drikos, L. Ship sensors data collection and analysis for condition monitoring of ship structures and machinery systems. In Proceedings of the Smart Ship Technology, London, UK, 26–27 January 2016. [Google Scholar]
- Noordstrand, A. Experience with Robotic Underwater Hull Cleaning in Dutch Ports. In Proceedings of the 3rd Hull Performance & Insight Conference, Redworth, UK, 12–14 March 2018; pp. 4–9. [Google Scholar]
- Drewing, S.; Witkowski, K. Spectral Analysis of Torsional Vibrations Measured by Optical Sensors, as a Method for Diagnosing Injector Nozzle Coking in Marine Diesel Engines. Sensors 2021, 21, 775. [Google Scholar] [CrossRef] [PubMed]
- Kozak, M.; Bejger, A.; Tomczak, A. Identification of Gate Turn-Off Thyristor Switching Patterns Using Acoustic Emission Sensors. Sensors 2021, 21, 70. [Google Scholar] [CrossRef] [PubMed]
- Kyzioł, L.; Panasiuk, K.; Hajdukiewicz, G.; Dudzik, K. Acoustic emission and k-s metric entropy as methods for determining mechanical properties of composite materials. Sensors 2021, 21, 145. [Google Scholar] [CrossRef] [PubMed]
- Hill, V.J.; Zimmerman, R.C. Estimates of primary production by remote sensing in the Arctic Ocean: Assessment of accuracy with passive and active sensors. Deep Sea Res. I 2010, 157, 1243–1254. [Google Scholar] [CrossRef]
- Høyer, J.L.; Karagali, I.; Dybkjær, G.; Tonboe, R. Multi sensor validation and error characteristics of Arctic satellite sea surface temperature observations. Remote Sens. Environ. 2012, 121, 335–346. [Google Scholar] [CrossRef]
- Tagesson, T.; Mastepanov, M.; Mölder, M.; Tamstorf, M.P.; Eklundh, L.; Smith, B.; Sigsgaard, C.; Lund, M.; Ekberg, A.; Falik, J.M.; et al. Modelling of growing season methane fluxes in a high-Arctic wet tundra ecosystem 1997–2010 using in situ and high-resolution satellite data. Tellus B Chem. Phys. Meteorol. 2013, 65, 19722. [Google Scholar] [CrossRef] [Green Version]
- Lund, M.; Hansen, B.U.; Pedersen, S.H.; Stiegler, C.; Tamstorf, M.P. Characteristics of summer-time energy exchange in a high Arctic tundra heath 2000–2010. Tellus B Chem. Phys. Meteorol. 2014, 66, 21631. [Google Scholar] [CrossRef] [Green Version]
- Goodrich, J.P.; Oechel, W.C.; Gioli, B.; Moreaux, V.; Murphy, P.C.; Burba, G.; Zona, D. Impact of different eddy covariance sensors, site set-up, and maintenance on the annual balance of CO2 and CH4 in the harsh Arctic environment. Agric. For. Meteorol. 2016, 228–229, 239–251. [Google Scholar] [CrossRef] [Green Version]
- Connolly, R.; Connolly, M.; Soon, W. Re-calibration of Arctic sea ice extent datasets using Arctic surface air temperature records. Hydrol. Sci. J. 2017, 62, 1317–1340. [Google Scholar] [CrossRef]
- Hesaraki, S.; O’Neil, N.T.; Lesins, G.; Saha, A.; Martin, R.V.; Fioletov, V.E.; Baibakov, K.; Abboud, I. Comparisons of a Chemical Transport Model with a Four-Year (April to September) Analysis of Fine and Coarse-Mode Aerosol Optical Depth Retrievals Over the Canadian Arctic. Atmos. Ocean 2017, 55, 213–229. [Google Scholar] [CrossRef]
- Howell, S.E.I.; Small, D.; Rohner, C.; Mahmud, M.S.; Yackel, J.J.; Brady, M. Estimating melt onset over Arctic sea ice from time series multi-sensor Sentinel-1 and RADARSAT-2 backscatter. Remote Sens. Environ. 2019, 229, 48–59. [Google Scholar] [CrossRef]
- Carotenuto, F.; Brilli, L.; Gioli, B.; Gualtieri, G.; Vagnoli, C.; Mazzola, M.; Viola, A.P.; Vitale, V.; Severi, M.; Traversi, R.; et al. Long-Term Performance Assessment of Low-Cost Atmospheric Sensors in the Arctic Environment. Sensors 2020, 20, 1919. [Google Scholar] [CrossRef] [Green Version]
- Pomerleau, P.; Royer, A.; Langlois, A.; Cliché, P.; Courtemanche, B.; Madore, J.B.; Picard, G.; Lefebvre, É. Low Cost and Compact FMCW 24 GHz Radar Applications for Snowpack and Ice Thickness Measurements. Sensors 2020, 20, 3909. [Google Scholar] [CrossRef]
- Løken, T.K.; Rabault, J.; Jensen, A.; Sutherland, G.; Christensen, K.H.; Müller, M. Wave measurements from ship mounted sensors in the Arctic marginal ice zone. Cold Reg. Sci. Technol. 2021, 182, 103207. [Google Scholar] [CrossRef]
- Nikishin, A.M.; Petrov, E.I.; Cloetingh, S.; Korniychuk, A.V.; Morozov, A.F.; Petrov, O.V.; Poselov, V.A.; Beziazykov, A.V.; Skolotnev, S.G.; Malyshev, N.A.; et al. Arctic Ocean Mega Project: Paper 1—Data collection. Earth Sci. Rev. 2021, in press. [Google Scholar]
- Kodaira, T.; Waseda, T.; Nose, T.; Sato, K.; Inoue, J.; Voermans, J.; Babanin, A. Observation of on-ice wind waves under grease ice in the western Arctic Ocean. Polar Sci. 2021, in press. [Google Scholar] [CrossRef]
- Elshafey, A.A.; Haddara, M.R.; Marzouk, H. Damage detection in offshore structures using neural networks. Mar. Struct. 2010, 23, 131–145. [Google Scholar] [CrossRef]
- Razi, P.; Taheri, F. A Vibration-Based Strategy for Health Monitoring of Offshore Pipelines’ Girth-Welds. Sensors 2014, 14, 17174–17191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, F.; Lu, H.; Wang, W.; Yang, D. Periodic Damage Evaluation of Aging Offshore Jackets Based on Continuous Dynamic Test. J. Mar. Sci. Technol. 2014, 22, 732–738. [Google Scholar]
- Asgarian, B.; Aghaeidoost, V.; Shokrgozar, H.R. Damage detection of jacket type offshore platforms using rate of signal energy using wavelet packet transform. Mar. Struct. 2016, 45, 1–21. [Google Scholar] [CrossRef]
- Hosseinlou, F.; Mojtahedi, A. Developing a robust simplified method for structural integrity monitoring of offshore jacket-type platform using recorded dynamic responses. Appl. Ocean Res. 2016, 56, 107–118. [Google Scholar] [CrossRef]
- Opoka, S.; Soman, R.; Mieloszyk, M.; Ostachowicz, W. Damage detection and localization method based on a frequency spectrum change in a scaled tripod model with strain rosettes. Mar. Struct. 2016, 49, 163–179. [Google Scholar] [CrossRef]
- Mieloszyk, M.; Ostachowicz, W. An application of Structural Health Monitoring system based on FBG sensors to offshore wind turbine support structure model. Mar. Struct. 2017, 51, 65–86. [Google Scholar] [CrossRef]
- Luczak, M.M.; Telega, J.; Zagato, N.; Mucchi, E. On the damage detection of a laboratory scale model of a tripod supporting structure by vibration-based methods. Mar. Struct. 2019, 64, 146–160. [Google Scholar] [CrossRef]
- Li, W.; Huang, Y. A Method for Damage Detection of a Jacket Platform under Random Wave Excitations Using Cross Correlation Analysis and PCA-Based Method. Ocean Eng. 2020, 214, 107734. [Google Scholar] [CrossRef]
- Fathi, A.; Esfandiari, A.; Fadavie, M.; Mojtahedi, A. Damage detection in an offshore platform using incomplete noisy FRF data by a novel Bayesian model updating method. Ocean Eng. 2020, 217, 108023. [Google Scholar] [CrossRef]
- Liu, Y.; Lu, Z.; Yan, X.; Liu, Z.; Tang, L. Measurement and modelling of the vibration induced by working equipment on an offshore platform. Ocean Eng. 2021, 219, 108354. [Google Scholar] [CrossRef]
- Vidal, Y.; Aquino, G.; Pozo, F.; Gutiérrez-Arias, J.E.M. Structural Health Monitoring for Jacket-Type Offshore Wind Turbines; Experimental Proof of Concept. Sensors 2020, 20, 1835. [Google Scholar] [CrossRef] [Green Version]
- Puruncajas, B.; Vidal, Y.; Tutivén, C. Vibration-Response-Only Structural Health Monitoring for Offshore Wind Turbine Jacket Foundations via Convolutional Neural Networks. Sensors 2020, 20, 3429. [Google Scholar] [CrossRef]
- Tang, D.; Chen, J.; Wu, W.; Jin, L.; Yue, Q.; Xie, B.; Wang, S.; Feng, J. Research on sampling rate selection of sensors in offshore platform shm based on vibration. Appl. Ocean Res. 2020, 101, 102192. [Google Scholar] [CrossRef]
- Chen, J.; Su, Z.; Cheng, L. Identification of corrosion damage in submerged structures using fundamental anti-symmetric Lamb waves. Smart Mater. Struct. 2010, 19, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Li, Z.; Jin, W. A New Corrosion Sensor to Determine the Start and Development of Embedded Rebar Corrosion Process at Coastal Concrete. Sensors 2013, 13, 13258–13275. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mu, X.; Wei, J.; Dong, J.; Ke, W. In Situ Corrosion Monitoring of Mild Steel in a Simulated Tidal Zone without Marine Fouling Attachment by Electrochemical Impedance Spectroscopy. J. Mater. Sci. Technol. 2014, 30, 1043–1050. [Google Scholar] [CrossRef]
- Islam, M.R.; Bagherifaez, M.; Ali, M.M.; Chai, H.K.; Lim, K.; Ahmad, H. Tilted Fiber Bragg Grating Sensors for Reinforcement Corrosion Measurement in Marine Concrete Structure. IEEE Trans. Instrum. Meas. 2015, 64, 3510–3516. [Google Scholar] [CrossRef]
- Nie, M.; Neodo, S.; Wharton, J.A.; Cranny, A.; Harris, N.R.; Wood, R.J.K.; Stokes, K.R. Electrochemical detection of cupric ions with boron-doped diamond electrode for marine corrosion monitoring. Electrochim. Acta 2016, 202, 345–356. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Company-Corcoles, J.P. Vision-Based Corrosion Detection Assisted by a Micro-Aerial Vehicle in a Vessel Inspection Application. Sensors 2016, 16, 2118. [Google Scholar] [CrossRef]
- Dahai, X.; Shizhe, S.; Weixian, J.; Jian, L.; Zhiming, G.; Jihui, W.; Wenbin, H. Atmospheric Corrosion Monitoring of Field-exposed Q235B and T91 Steels in Zhoushan Offshore Environment Using Electrochemical Probes. J. Wuhan Univ. Technol. Mater. Sci. Ed. 2017, 32, 1433–1440. [Google Scholar]
- Luo, D.; Li, P.; Yue, Y.; Ma, J.; Yang, H. In-Fiber Optic Salinity Sensing: A Potential Application for Offshore Concrete Structure Protection. Sensors 2017, 17, 962. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Yang, Y.; Wang, Y.; Zhao, X. Artificial intelligence-based hull structural plate corrosion damage detection and recognition using convolutional neural network. Appl. Ocean Res. 2019, 90, 101823. [Google Scholar] [CrossRef]
- Gartner, N.; Kosec, T.; Legat, A. Monitoring the Corrosion of Steel in Concrete Exposed to a Marine Environment. Materials 2020, 13, 407. [Google Scholar] [CrossRef] [Green Version]
- Ahuir-Torres, J.I.; Bausch, N.; Farrar, A.; Webb, S.; Simandjuntak, S.; Nash, A.; Thomas, B.; Muna, J.; Jonsson, C.; Mathew, D. Benchmarking parameters for remote electrochemical corrosion detection and monitoring of offshore wind turbine structures. Wind Energy 2019, 22, 857–876. [Google Scholar] [CrossRef] [Green Version]
- Ha, M.-G.; Jeon, S.H.; Jeong, Y.-S.; Mha, H.-S.; Ahn, J.-H. Corrosion Environment Monitoring of Local Structural Members of a Steel Truss Bridge under a Marine Environment. Int. J. Steel Struct. 2021, 21, 167–177. [Google Scholar] [CrossRef]
- Poggi, L.; Gaggero, T.; Gaiotti, M.; Ravina, E.; Rizzo, C.M. Recent Developments in Remote Inspections of Ship Structures. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 881–891. [Google Scholar] [CrossRef]
- Abdulkader, R.E.; Veerajagadheswar, P.; Lin, N.H.; Kumaran, S.; Vishaal, S.R.; Mohan, R.E. Sparrow: A Magnetic Climbing Robot for Autonomous Thickness Measurement in Ship Hull Maintenance. J. Mar. Sci. Eng. 2020, 8, 469. [Google Scholar] [CrossRef]
- Liu, Q.; Bai, C.; Li, X.; Jiang, L.; Dai, W. Coal dust/air explosions in a large-scale tube. Fuel 2010, 89, 329–335. [Google Scholar] [CrossRef]
- Bai, C.; Gong, G.; Liu, Q.; Chen, Y.; Niu, G. The explosion overpressure field and flame propagation of methane/air and methane/coal dust/air mixtures. Saf. Sci. 2011, 49, 1349–1354. [Google Scholar] [CrossRef]
- Kujala, P.; Arughadhoss, S. Statistical analysis of ice crushing pressures on a ship’s hull during hull–ice interaction. Cold Reg. Sci. Technol. 2012, 70, 1–11. [Google Scholar] [CrossRef]
- Kong, X.S.; Wu, W.G.; Li, J.; Chen, P.; Liu, F. Experimental and numerical investigation on a multi-layer protective structure under the synergistic effect of blast and fragment loadings. Int. J. Impact Eng. 2014, 65, 146–162. [Google Scholar] [CrossRef]
- Pierre, L.S.; Deshpande, V.S.; Fleck, N.A. The low velocity impact response of sandwich beams with a corrugated core or a Y-frame core. Int. J. Mech. Sci. 2015, 91, 71–80. [Google Scholar] [CrossRef]
- Niklas, K.; Kozak, J. Experimental investigation of Steel–Concrete–Polymer composite barrier for the ship internal tank construction. Ocean Eng. 2016, 111, 449–460. [Google Scholar] [CrossRef]
- Moon, S.J.; Kwon, J.I.; Park, J.W.; Chung, J.H. Assessment on shock pressure acquisition from underwater explosion using uncertainty of measurement. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 589–597. [Google Scholar] [CrossRef]
- Jun, G.; Shichun, H.; Taranukha, N.; Mingqi, L. Vibration damping of naval ships based on ship shock trials. Appl. Acoust. 2018, 133, 52–57. [Google Scholar]
- Li, Y.; Chen, Z.; Zhao, T.; Cao, X.; Jiang, Y.; Xiao, D.; Fang, D. An experimental study on dynamic response of polyurea coated metal plates under intense underwater impulsive loading. Int. J. Impact Eng. 2019, 133, 103361. [Google Scholar] [CrossRef]
- Hsu, C.Y.; Chiang, C.C.; Hsieh, T.S.; Chen, T.H.; Chen, Y.H. A study of strain measurement in cylindrical shells subjected to underwater shock loading using FBG sensors. Optik 2020, 217, 164701. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, W.; Li, D.; Chen, T.; Tang, Y.; Guo, Z. Experimental analysis on dynamic response of pre-cracked aluminum plate subjected to underwater explosion shock loadings. Thin Walled Struct. 2021, 159, 107256. [Google Scholar] [CrossRef]
- Mieloszyk, M.; Majewska, K.; Ostachowics, W. Application of embedded fibre Bragg grating sensors for structural health monitoring of complex composite structures for marine applications. Mar. Struct. 2021, 76, 102903. [Google Scholar] [CrossRef]
- Wang, H.; Fu, Z.; Zhou, J.; Fu, M.; Ruan, L. Cooperative collision avoidance for unmanned surface vehicles based on improved genetic algorithm. Ocean Eng. 2021, 222, 108612. [Google Scholar] [CrossRef]































| Milestone | Author(s) | Observational Subject | Tools/Instrument | Important Remarks |
|---|---|---|---|---|
| 2007 | Nezlin et al. [54] | Ship-based sampling for evaluation of stormwater in the ocean region | High-resolution satellite imagery | The study shows that Moderate-Resolution Imaging Spectroradiometer (MODIS) sensors provided better coverage than Sea-viewing Wide Field-of-view Sensor (SeaWiFS) or Advanced Very High-Resolution Radiometer (AVHRR) due to greater spectral, spatial, and particularly, temporal resolution (twice a day), thereby significantly improving information about plume dynamics. |
| 2017 | De Maio et al. [57] | Oil spill detection in the sea territory | Multi-polarization synthetic aperture radar (SAR) images | The presence of both simulated and real data in the one-sided generalized likelihood ratio test (GLRT) confirms the practical effectiveness for oil detection. |
| 2018 | Kanjir et al. [56] | Vessel detection in the sea territory | Optical satellite imagery | The result shows that vessel monitoring from spaceborne optical images is a thriving research topic and will have excellent operational potential in the future due to a massive number of satellite data, much of it being free and open. |
| 2018 | Xie et al. [66] | Inshore ship detection | Synthetic aperture radar (SAR) | The result shows that inshore ships can be detected using SAR images with reasonable accuracy and integrity. |
| 2019 | Gui et al. [65] | Ship detection on the surface of the sea | Multilayer fusion light-head detector (MFLHD) Synthetic aperture radar (SAR) | The extensive experiments on the multilayer fusion light-head detector (MFLHD) achieved superior performance in SAR ship detection, in terms of both accuracy and speed. |
| 2019 | Song et al. [55] | Ship detection in the inland river | High-resolution optical satellite imagery | The result shows that using a mixture of multi-scale Deformable Part Models (DPMs) and a Histogram of Oriented Gradient (HOG) is effective in ship detection and performs properly in separating ships clustered together and those alongside the pier. |
| 2020 | Zou et al. [61] | Ship detection on the surface of the sea | Multiscale Wasserstein auxiliary classifier generative adversarial network (MW-ACGAN) and the Yolo v3 network Synthetic aperture radar (SAR) | The Multiscale Wasserstein Auxiliary Classifier Generative Adversarial Network (MW-ACGAN) can effectively generate realistic multiclass ship images. |
| 2020 | Dai et al. [64] | Ship detection on the surface of the sea | Synthetic aperture radar (SAR) | The novel detector based on convolution neural networks for multiscale SAR ship detection showed better performance compared to the method from the SAR ship detection dataset (SSDD). |
| Year | Authors | Observational Subject and Purpose | Sensing Technology and Instrument | Important Remarks |
|---|---|---|---|---|
| 2010 | Tzabiras and Kontogiannis [70] | Hydrodynamic resistance of three twin-screw and low-cB passenger ship models with different bulbous bows | Five resistance-type wave probes | Wave probe is sensitive to environmental changes, so repeated calibration is needed in each test. |
| 2011 | Polach and Ehlers [71] | Heave and pitch motions on the resistance in ice going tanker “Uikku” | Dynamic motion unit (DMU), load cell, cameras (video recording), pointer | The oscillations and vibrations possibly interfere with resistance signal and motion measurements. |
| 2012 | Lee et al. [72] | Hydrodynamic design and performance of an underwater hull cleaning robot (HCR) | Resistance dynamometer, electromagnetic flow meter, camera, weighing scale | The actual drag force is larger than that obtained by CFD. This discrepancy is assumed by a different setup between CFD and the actual test. |
| 2013 | Bouscasse et al. [73] | Seakeeping behavior of Delft 372 fast catamaran | Krypton optical system (Infrared LEDs), a finger probe and Keyence ultrasound wave probe, second wave system, HYDRONICS load cells, acquisition system | The Kenek probe is applicable for low Fr test and wave steepness, and the ultrasound probe is more accurate for higher Fr and larger wave steepness. |
| 2014 | Jang et al. [74] | Frictional resistance reduction of hull bottom of 66K DWT Supramax bulk carrier | Floating-plate-type friction sensors, camera, flow meter | The air layer is not fully developed on the floating plate. The air layer is split into left and right in front of the aft local friction sensor. |
| 2015 | Fossati et al. [75] | A full-scale test of 10-m Sailing Yacht Lab | Strain gauges based mono-axial HBM S9M load cells, a 3DM-GX3-35 GPS (AHRS and GPS receiver), GEMAC 23554 analog inclination sensor, gyroscope, accelerometer, magnetometer, ultrasonic 3D anemometer, TOF flying shape detection system, MEMS sensor, and pressure pads | A graphical user interface (GUI) is used to synchronize different types of signals and sampled signals. |
| 2016 | Rajendran et al. [76] | Vertical motions and bending moments on a cruise ship | Resistive wave sensors, strain gauge | Strain gauges are placed at the same height as tVCG to calculate the vertical bending moment. |
| 2017 | Jiao et al. [77] | A large-scale seakeeping test at realistic sea conditions of 72,000-ton class ship | The sensors of small-scale laboratory test: wave probes, strain gauges, pressure sensors, accelerometers, rotary potentiometers, and data collectors The sensors for large-scale measurement: Ocean environment monitoring sensors, fiber optic sensor, GPS/INS system, radio control and telemetry system (self-propulsion system, autopilot system, radio communication system, telemetry system) | The proposed remote control and experimental telemetry system for large-scale measurement in actual sea waves were successfully developed. |
| 2019 | Carchen et al. [78] | Ship performance monitoring system on The Princess Royal vessel | DGPS and gyrocompass, Doppler speed log, electro-magnetic speed log, instrumented shafts, rudder potentiometer, wave radar, wave buoy, weather station (ultrasonic anemometer), thermosalinograph | The sampling frequency selection is crucial for acquiring the resolution of the phenomena. |
| 2020 | Kim et al. [79] | Propulsion power measurement of a 200,000-ton bulk cargo ship | GPS sensor/NMEA0183, Draft sensor (Hydrostatic level pressure transmitters), RPM indicator, Echo sounder, Doppler log, anemometer, accelerometer, shaft torque sensor (strain gauge), VDR | The shaft power measurement and recorded raw information are transformed through the data acquisition unit of a voyage data recorder (VDR). |
| Milestone | Author(s) | Observational Subject | Tools/Instrument | Important Remarks |
|---|---|---|---|---|
| 2007 | Paik et al. [86] | Communication based in the ship environment | Wireless sensor network (WSN) ZPAs (Zigbee Protocol Analyzers) | The wireless sensor network (WSN) can be used in the ship environment (in this case, Hannara ship), with an average delivery ratio of nearly 100% in all proposed distances in this case. |
| 2009 | Paik et al. [87] | Communication based in the ship environment | Wireless sensor network (WSN) ZPAs (Zigbee Protocol Analyzers) | Wireless communication that can be used regularly is desirable within a ship environment, such as for fire prevention in dangerous regions. |
| 2010 | Penttilä and Ruponen [88] | Breach and floodwater detection in the ship | Sensor density, noise, and filter length combined with an inverse method | The result shows that the method is able to determine the floodwater origin accurately with an average success rate of 98.6% in finding the primarily flooded room. |
| 2016 | Lazakis et al. [89] | Ship inspection and maintenance for ship structures and machinery | Inspection Capabilities for Enhanced Ship Safety (INCASS) Structural risk assessment (SRA) and machinery risk assessment tools (MRA) | It is noted that the development and implementation of the INCASS framework has a reliable performance according to ship owners and operators. |
| 2016 | Raptodimos et al. [90] | Ship inspection and maintenance for ship structures and machinery | Inspection Capabilities for Enhanced Ship Safety (INCASS) Structural risk assessment (SRA) and machinery risk assessment tools (MRA) | Sensors installed on a specific system allow for improving measurements and data collection and can be used further in analysis and assessment to enhance ship safety, maintenance, and performance and efficiency. |
| 2018 | Noordstrand [91] | Remotely controlled robot for ship hull cleaning | Fleet Cleaner robot | The Fleet Cleaner robot is very reliable for cleaning a ship’s hull because it can be used underwater and above water at a high curvature. |
| 2021 | Drewing et al. [92] | Coking in marine diesel engine injector nozzle | Laser heads clocked at 16 MHz | Coking in a marine diesel engine injector nozzle can be diagnosed by spectral analysis of the shaft’s torsional vibrations as measured by optical sensors. |
| 2021 | Kozak et al. [93] | Semiconductor power electronics devices, including thyristors | Acoustic emission sensor | The method proposed for detecting early-stage damage of the gate turn-off thyristor using an acoustic emission sensor is viable and valuable to observe changes in volume caused by abnormal conditions, such as overheating, internal dislocations, or a decrease in wafer plate pressure. |
| 2021 | Kyzioł et al. [94] | Material properties of polymer composites in hull boats | Acoustic emission Kolmogorov–Sinai (K–S) metric entropy | The results show that the proposed method using acoustic emission and Kolmogorov–Sinai (K–S) metric entropy can determine the mechanical properties of the transition material from the elastic to the plastic phase of polymer composites. |
| Milestone | Author(s) | Observational Subject | Tools/Instrument | Important Remarks |
|---|---|---|---|---|
| 2010 | Hill and Zimmerman [95] | Annual production of global carbon cycle/primary production in the Arctic Ocean | Active sensors: utilizing light detection and ranging (LIDAR) | Vertical data based on LIDAR needed to be merged with the horizontal surface gradients observed using ocean color sensors to extrapolate the narrow LIDAR beam across the study area. |
| 2012 | Høyer et al. [96] | Sea surface temperature in the Arctic Ocean | Advanced Along-Tracking Scanning Radiometer (AATSR) Advanced Very High Resolution Radiometer (AVHRR) Advanced Microwave Scanning Radiometer-EOS (AMSR-E) | The most accurate satellite observations on the subject were obtained from IR observations using either the AVHRR (NAVO-GAC) or the AATSR. The results indicate low standard deviations. |
| 2013 | Tagesson et al. [97] | Methane fluxes in the high-Arctic wet tundra area | LGR, DLT200 Fast Methane Analyzer Moderate-resolution imaging spectroradiometer (MODIS) | Studied models performed well, but the observed models involving satellite-based normalized difference water index (NDWI) reproduced the CH4 flux variability better than the models not including NDWI. |
| 2014 | Lund et al. [98] | Surface energy balance of Arctic ecosystems | Infrared gas analyzer LI-6262 and 7000 3D sonic anemometer Gill R2 and R3 | Results indicated that H/Rn and LE/Rn increased, and b and G/Rn were decreased when subjected to the increasing active layer depth in the 2000–2010 period. |
| 2016 | Goodrich et al. [99] | CO2 and CH4 fluxes in the Arctic region | Metek uSonic-3 Class A (non-orthogonal ultrasonic-anemometer) CSAT3 anemometer | Application of the different eddy covariance sensor combinations indicated that seasonal and annual CO2 and CH4 fluxes from the different gas analyzers and anemometers were within uncertainties. |
| 2017 | Connolly et al. [100] | Ice extent on the Arctic sea | Satellite sensing (Nimbus-7, DMSP-F8, DMSP-F11, DMSP-F13, and DMSP-F17) | The recent period of Arctic sea ice retreat since the 1970s followed a period of sea ice growth after the mid-1940s. After the 1910s, data reconstructions agree with previous studies that pointed to a decreasing tendency in Arctic sea ice extent. |
| 2017 | Hesaraki et al. [101] | Aerosol optical depth (AOD) | Aerosol Robotic Network (AERONET) GEOS-Chem (GC) | The histograms of both the AERONET retrievals and the GC estimates were better represented by a lognormal distribution. AERONET and GC simulations displayed seasonal variations, reaching peaks in April/May and August/September. |
| 2019 | Howell et al. [102] | Melt onset over sea ice on the Canadian Arctic and Greenland | Sentinel-1 RADARSAT-2 | Passive microwave (PMW) algorithm provides the best measurement of melt onset. However, SAR imagery can provide more robustness in estimating the subject, especially with the spatiotemporal constraints of C-band SAR satellites. |
| 2020 | Carotenuto et al. [103] | Atmospheric (temperature, humidity) sensor performance in the Arctic | AIRQino | AIRQino is proven to be more economical in terms of power consumption, and it can produce reliable data compared to other high-cost reference sensors. |
| 2020 | Pomerleau et al. [104] | Snowpack and ice thickness | Autonomous frequency-modulated continuous-wave (FMCW) radar | Ice thickness measurements provide a 2-cm accuracy above a 4-cm resolution limit. The radar can be put onboard a light remotely piloted aircraft to enable surveys on unsafe thin ice and long river transects. |
| Authors | Application and Damage Scenario | SHM Tools/Instruments | Damage Detection Strategy | Important Remarks |
|---|---|---|---|---|
| Elshafey et al. (2010) [108] | A four-legged scaled jacket platform with four braced floors and one non-braced floor Damage is assumed by cutting one section of the member with four damaged locations | 4 wired accelerometers and eight strain gages, hydraulic actuator, computer (DAQ system and Labview), and 407-controller | In-air damage detection (Level 2) experiment using random excitation (white noise and Pierson–Moskowitz spectra) was conducted. Sensors were used to measure free decay responses and extract them using random decrement. The free decay and its time derivative were used as inputs for a neural network for damage detection (Level 2). | The success level of the method depended on the damage location. It is more sensitive to predicting damage in diagonal members than in horizontal members. |
| Raji and Taheri (2014) [109] | Offshore submerged pipeline Damage in the pipe’s girth weld against a propagating notch from 1 mm in depth to a depth of 4 mm | 8 flexible piezoelectric actuator/sensors (pa16n), pneumatic hammer, piezoelectric transducers, signal generator (33210A), power amplifier (790 series) | Damage detection (Level 2) of numerical simulations using ABAQUS and experimental test in the laboratory tank was compared using two excitations (impact and chirp excitation). The experimental test verified the integrity of the numerical model. | The chirp excitation method was more effective than the impact excitation for damage detection in the submerged pipes. SHM of the submerged pipe’s girth weld could be efficiently accomplished with a minimum of two transducers—one acting as a sensor and the other as an actuator—bonded on each side of the girth weld. |
| Liu et al. (2014) [110] | A four-legged offshore structure with steel tubular members Damage modeled by removing the bolt of the flanges in two locations | 12 triaxial capacitive accelerometers (4803A-0002), PL64-DCB8, integrated measurement and control cooperation, data acquisition system (NI-9215) | New proposed method of damage localization (Level 2) was developed to identify the damage between two adjacent measurements using modal strain energy change ratio (MSEC). The first scenario assumes that damage is modeled, and the first measurement is conducted. Then, the damage is modeled in the two other locations, and the second lot of measurement data are collected. | The new proposed method can be used to accurately localize damage that occurs in the time interval of two adjacent measurements, even in spatially incomplete situations. |
| Asgarian et al. (2015) [111] | A scaled six-legged jacket-type offshore platform in the Persian Gulf 11 damage scenarios in hinge-based condition and 7 damage scenarios in pile-supported condition | 8 accelerometers (2 three-dimensional, 2 two-dimensional, and 4 one-dimensional accelerometers), eccentric mass shaker, actuator system, 4-channel TMR data logger | Experimental dynamic test was analyzed using the rate of signal energy (RSE) using wavelet packet transform to detect damage location (Level 2). Two sets of signals from the intact and damaged conditions are required to detect damage. RSE is calculated for each node where sensors exist, and high RSE represents damage location. | Only sensors on damaged members have desirable RSE, and the other sensors have lower values of RSE. RSE has desirable values for sensors near damage location and non-significant values for other sensors. |
| Hosseinlou and Mojtahedi (2016) [112] | 1:100 scaled fixed jacket offshore platform (SPD9 in the Persian Gulf) with four legs constructed by ABS tubes Damage severity (3 damage scenarios) defined as the percentage of stiffness loss of the FE model | 2 light uni-axial accelerometers (4508 BandK), load cell, power amplifier (model 2706), electrodynamic exciter (type 4809) with a force sensor (AC20, APTech), PULSE software processing package | An experimental test is performed to provide validation of the FE result. Then, the FE-based updating method is developed, and sensitivity analysis is used as the basis to validate of Pseudo Simplified (PS) model. The cross model cross mode (CMCM) method and Pseudo Simplified (PS) model technique are proposed to detect damage severity (Level 3) in using spatially incomplete and with noise in modal data. | The proposed method can be applied for an offshore platform in service to save both time and cost. The result indicates that the improved CMCM method with the PS model technique is capable of damage diagnosis with limited, spatially incomplete modal data. |
| Opoka et al. (2016) [113] | Scaled offshore wind turbine with tripod support structure Crack is assumed by dismantled flange located in one of the upper braces of the tripod model | 8 optical three-element delta rosettes with fiber Bragg grating (FBG) sensors, impact hammer SmartScan, interrogator smart fibers for data acquisition | Both experimental and numerical vibration tests are conducted to detect and localize damage (Level 2) using the root mean square deviation (RMSD) estimator as a damage indicator. | The FBG sensors can measure strains along the grating length, and at least two sensors directed along directions are needed to increase confidence result in the specified location. The effectiveness of localization depends on the chosen new frequency peak used in the analysis. |
| Mieloszyk and Ostachowicz (2017) [114] | Offshore wind turbine with tripod support structure made of aluminum alloy (EN AW6060T66) Pipes Crack in the circumferential direction of the brace | 15 fiber Bragg grating (FBG) single-axis sensors (Micron Optic, os3120), 1 temperature compensation sensor (Micron Optics, os4100), interrogator (Micron Optic si425-500), water basin, wave generator, rotor | The damage detection (Level 2) is analyzed by an experimental laboratory test in a water basin that excites both artificial irregular waves and wind using FBG strain sensors. Strain measurement from FGB sensor is used for the frequency domain decomposition (FDD) method to detect and localize damage using different damage indexes. | The damage is most visible on sensors from the S1 set than on the others. Comparing strain values for every sensor to detect damage is possible for the same conditions only. The damage index can develop an automatic calculation process and apply it for unmanned SHM. |
| Luczak et al. (2019) [115] | Scaled model of a tripod-type supporting structure of an offshore wind turbine in the Polish Baltic sea made of cylindrical aluminum tubes Five circumferential crack scenarios in the upper central joint of the tripod support structure | 5 piezoelectric tri-axial accelerometers, transducer, electrodynamic shaker, hammer, Ship Design and Research left Towing Tank in Gdansk (Poland) | Vibration-based damage detection (Level 1) of the tripod model is analyzed by comparing acceleration signal between experimental modal analysis (EMA) in air using a shaker as input and operational modal analysis (OMA) in a towing tank with different operational conditions simulating real-life operation. | The low-frequency excitation cannot provide a suitable energy level at higher frequencies, with consequent difficulty in the post-processing of the acquired data. The sensor should be installed below the sea surface at a considerable distance from the acquisition equipment placed on the upper part of the turbine with consequent signal amplification. |
| Li et al. (2020) [116] | NB35-2 WHPB jacket oil platform Member loss, stiffness reduction, and supporting capacity reduction in the piled foundation in various locations | Servo electric cylinder, force sensor, 18 three-directional AKE398B-08 accelerometers (capacity ±8 g), data acquisition system 500 Hz | Damage location and severity (Level 3) measurement using a combination of the cross-correlation function and PCA-based outlier algorithm. | The accelerometers in the experimental test were installed on the deck, with the positions being consistent with the measuring points set in the numerical simulations. |
| Fathi et al. (2020) [117] | A scaled 2D fixed offshore platform in Bohai sea Damage scenarios modeled by removing the branches | 15 uni-axial accelerometers, electrodynamic exciter (type 4809), force sensor (AC20, APTech), power amplifier (model 2706) | Damage detection (Level 3) using a new Bayesian model updating framework is proposed with incomplete frequency response function (FRF) data. | The proposed damage detection method is efficient under noisy high-level data; the accuracy decreases as the number of measured DOFs is reduced. |
| 0 | 1 | 2 | 3 | 4 | |
|---|---|---|---|---|---|
| 0 | >99% | <1% | |||
| 1 | <1% | 98% | 2% | ||
| 2 | 7% | 93% | <1% | ||
| 3 | 75% | 25% | |||
| 4 | 1% | <1% | 99% |
| 0 | 1 | 2 | 3 | 4 | |
|---|---|---|---|---|---|
| 0 | >99% | <1% | <1% | ||
| 1 | <1% | 99% | <1% | ||
| 2 | <1% | 99% | |||
| 3 | >99% | <1% | |||
| 4 | 100% |
| Accuracy (%) | Validation Error | Training Error | Training Time | # of Images | |
|---|---|---|---|---|---|
| Without data augmentation | 93.81 | 0.1692 | 0.1167 | 11 min | 6400 |
| With data augmentation | 99.90 | 0.0044 | 0.0026 | 1196 min | 1,612,800 |
| Authors | Observational Platforms | Tools/Instruments | Important Remark |
|---|---|---|---|
| Chen et al. (2010) [122] | Quasi-circular zone chemical corrosion on the submerged aluminum plate | Lamb-wave-based identification (pulse-echo measurement scheme) with the assistance of probability-based diagnostic imaging technique | Rectification and compensation are required for medium coupling when applying Lamb wave-based corrosion monitoring with coupled media. |
| Xu et al. (2013) [123] | Steel rebar of coastal concrete | Anode–ladder system and Corrowatch System | Monitoring test corrosion state is developed based on electrochemical polarization dynamics. The ohm-drop effect can be ignored to obtain a more accurate result. |
| Mu et al. (2014) [124] | Steel structures (Q235B) in the marine tidal zone | Electrochemical impedance spectroscopy (EIS) | Simulating the marine tidal corrosion under laboratory test is feasible, and the comb-shaped double electrode probe is suitable for in situ EIS monitoring. |
| Islam et al. (2015) [125] | Steel reinforcing bar of the marine concrete structure | Tilted fiber Bragg grating (TFBG) sensors | Higher-order cladding resonances exhibit relatively higher sensitivity to corrosion times than the lower-order cladding resonance existing near the Bragg wavelength. |
| Nie et al. (2016) [126] | Copper alloy marine structures | Oxygen-terminated Boron-doped diamond (BDD) disk by Diamond Detectors Ltd. | The monitoring by quantification of copper ions using the DPV technique results in an excellent linear relationship between peak current density and copper ion concentration. |
| Ortiz et al. (2016) [127] | Coating breakdown/corrosion (CBC) in vessel structure (bulk carrier) | Semi-autonomous micro-aerial vehicles (MACs)—INCASS aerial platform Features: Laser scanner Hokuyo UST-20LX, downward-looking LIDAR-Lite laser range finder, cameras and video footage, LED, Intel NUC D54250WYB embedded PC | Future enhancement steps should comprise the fusion of the laser scanner with optical flow sensors to enlarge the inspection area. |
| Dahai et al. (2017) [128] | Atmospheric corrosion of T91 steel and Q235B exposed to Zhoushan offshore environment | Electrochemical noise (EN) is composed of a compact (cRIO) module, two zero resistance ammeter (ZRA) modules, a lithium-ion battery, DC power supply, and two atmospheric-corrosion-monitoring probes | The application of atmospheric probes in the offshore environment for a long time may not be suitable due to the formed rust layer. |
| Luo et al. (2017) [129] | Offshore concrete structure | Optical fiber-based salinity sensor based on multimode plastic optical fiber (POF) as a sensor probe | More improvements are needed to reach the industrial expectation, including replacing the multi-axis stage to realize automatic survey, making the sensor probe and light source movable, and re-designing the sensor probe to attain simultaneous calculation. |
| Yao et al. (2019) [130] | Ship hull structural plate | Convolutional neural network (CNN) model using image data (camera) | The CNN model training requires massive image data with different categories and conditions. |
| Gartner et al. (2020) [131] | Concrete columns with carbon and stainless steel reinforcements exposed to the north Adriatic coast environment | Electrical resistance (ER) probes and coupled multi-electrodes (CMEs) | The infrequent sampling rate of measurement by ER and CMEs is more problematic due to the severe changing exposure conditions. Continuous monitoring with wireless data acquisition can be implemented. |
| Milestone | Author(s) | Observational Subject | Tools/Instrument | Important Remarks |
|---|---|---|---|---|
| 2010 | Liu et al. [136] | Coal dust explosion in mine sites | Kistler piezoelectric pressure sensor Experimental tube | Combustion and explosion of fine particle coal dust with Ø 45–70 μm was observed faster than that of coarse particle with Ø 70–105 μm. |
| 2011 | Bai et al. [137] | The explosion of methane–air mixtures | Pressure sensor High-speed camera Explosion vessel | Methane/air mixture could be ignited in the vessel by 40-J electric spark when the methane concentration was approximately 5–13%. |
| 2012 | Kujala and Arughadhoss [138] | Steel hull–ice collision | I-Scan 210 tactile sensors | Pressure measurements conducted by the tactile sensor in the deployed model scale provide realistic distributions for the ice-induced loads. The condition is concluded from a level ice environment. |
| 2014 | Kong et al. [139] | Naval vessel’s multi-layer protective structure under blast and fragment loadings | Sensors: Strain gauge Accelerometer | Stiffened plates were found to be easily penetrated by fragments. It is different compared to the thick structure, to which the fragments only caused localized damage. |
| 2015 | Pierre et al. [140] | Sandwich beams under low-velocity impact (representation of ship collision and grounding) | Phantom V12 camera Force sensors | Post-peak responses for the drop-weight and quasi-static measurements were very similar, which indicates that the beam response is not sensitive to the material strain rate or inertial effects for impact velocity of approx. 5 m/s. |
| 2016 | Niklas and Kozak [141] | Steel–concrete–polymer (SCP) composite barrier under corrosion and impact | AMSYS system VS30-V VS75-V sensors Displacement gauges | SCP structures were still in a tight condition until undergoing 5 times deeper penetration compared to the initial state. |
| 2017 | Moon et al. [142] | Ship structure subjected to the underwater explosion (UNDEX) | Underwater pressure sensor W138A10 Data acquisition (DAQ) systems: NI 9234 NI-PXIe-4497 NI PXIe-5160 | Analog–digital converter (ADC) resolution may be low in the condition where the sampling rate is very high. On the other hand, even though the sampling rate is low, the effect on the measurement result will be small, with ADC resolution in a high state. |
| 2018 | Jun et al. [143] | Naval structure subjected to shock trial | Shock sensor Least-squares complex exponential (LSCE) method | The values of α presented in the research are less than the proposed value for DDG-53, while the values of β in this work are greater than the reference. α and β are the Rayleigh coefficients. |
| 2019 | Li et al. [144] | Polyurea-coated metal plate subjected to underwater shock wave | Piezoelectric pressure sensor Photron-Fastcam-SA1 high-speed camera Genesis data acquisition (DAQ) systems | Polyuria coating had a significant effect on the plastic deformation of the coated plate subjected to the applied loading in the trials. The recorded critical peak was approx. 87 MPa. |
| 2020 | Hsu et al. [145] | Cylindrical shell subjected to underwater shock loading (representative of marine structures) | Fiber Bragg grating (FBG) sensor Data acquisition (DAQ) systems | FBG is concluded to have excellent repeatability and linearity characteristics in recording the strain loading cycles. To avoid sensor deformation due to spontaneous loading, the sensor design may be developed with a buffer mechanism to reduce the shock effect in measurement. |
| Notation | Plate Thickness (mm) | Loading Diameter (mm) | Crack Type | Crack Length (mm) |
|---|---|---|---|---|
| T-6 | 0.5 | 66 | Single slim crack (‘−’) | 6 |
| T-9 | 0.5 | 66 | Single slim crack (‘−’) | 9 |
| T+6 | 0.5 | 66 | Double cross crack (‘+’) | 6 |
| T+9 | 0.5 | 66 | Double cross crack (‘+’) | 9 |
| Stage | Sensors | |||
|---|---|---|---|---|
| S1 | S2 | S3 | S4 | |
| Auto-correlation | ||||
| F | 0.9963 | 0.9983 | 0.9997 | 0.9787 |
| Cross-correlation | ||||
| E𝑆 | 0.9949 | 0.9943 | 0.9904 | 0.9700 |
| E𝐹 | 0.9559 | 0.9854 | 0.9575 | 0.9528 |
| R | 0.6219 | 0.8783 | 0.5520 | 0.2515 |
| B10ℎ | 0.6950 | 0.8872 | 0.5617 | 0.2310 |
| B80ℎ | 0.8341 | 0.8612 | 0.5290 | 0.2604 |
| Parameters | Conventional GA | Improved GA | Gap Value (%) |
|---|---|---|---|
| Numbers of iteration (-) | 250 | 100 | 60 (reduced) |
| Standard deviation (-) | 1.876 | 0.266 | 85.82 (reduced) |
| Computation time (ms) | 160 | 90 | 43.75 (reduced) |
| Success rate (%) | 80 | 95 | 15.79 (enlarged) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prabowo, A.R.; Tuswan, T.; Ridwan, R. Advanced Development of Sensors’ Roles in Maritime-Based Industry and Research: From Field Monitoring to High-Risk Phenomenon Measurement. Appl. Sci. 2021, 11, 3954. https://doi.org/10.3390/app11093954
Prabowo AR, Tuswan T, Ridwan R. Advanced Development of Sensors’ Roles in Maritime-Based Industry and Research: From Field Monitoring to High-Risk Phenomenon Measurement. Applied Sciences. 2021; 11(9):3954. https://doi.org/10.3390/app11093954
Chicago/Turabian StylePrabowo, Aditya Rio, Tuswan Tuswan, and Ridwan Ridwan. 2021. "Advanced Development of Sensors’ Roles in Maritime-Based Industry and Research: From Field Monitoring to High-Risk Phenomenon Measurement" Applied Sciences 11, no. 9: 3954. https://doi.org/10.3390/app11093954
APA StylePrabowo, A. R., Tuswan, T., & Ridwan, R. (2021). Advanced Development of Sensors’ Roles in Maritime-Based Industry and Research: From Field Monitoring to High-Risk Phenomenon Measurement. Applied Sciences, 11(9), 3954. https://doi.org/10.3390/app11093954