
Neuro-Inspired Computing with Spin-VCSELs




Abstract
:1. Introduction
2. The Theoretical Model
2.1. The Spin-VCSEL
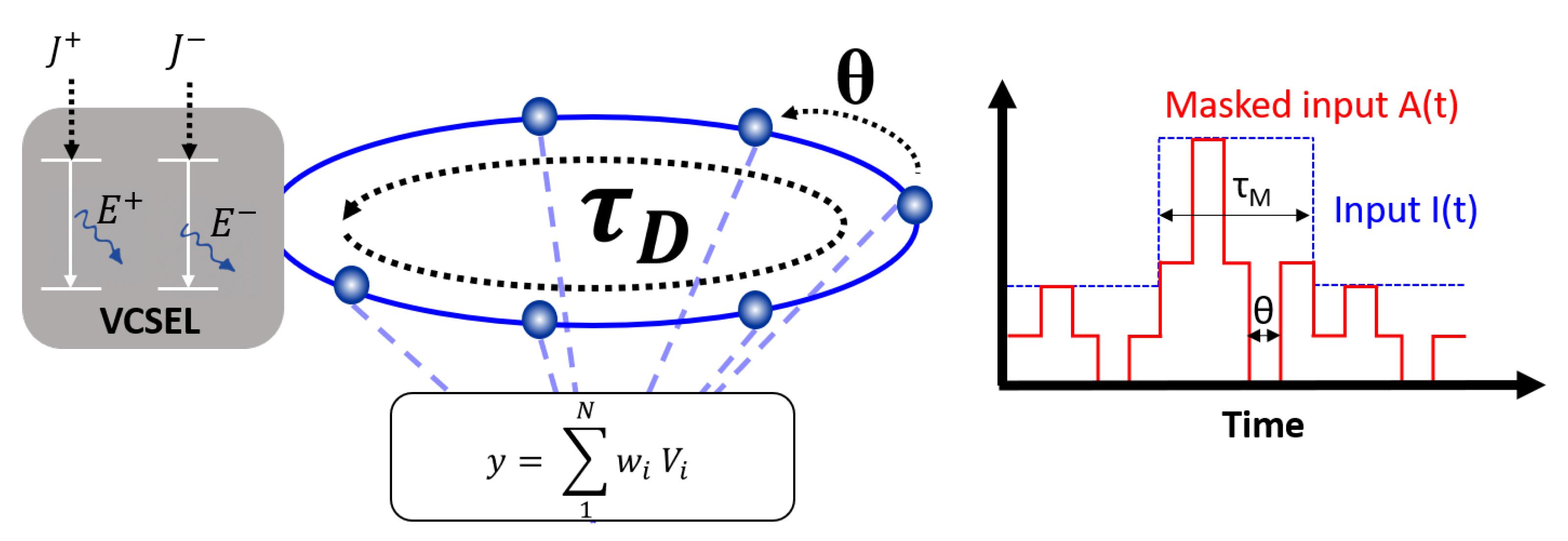
2.2. The RC Setup
3. Results and Discussion
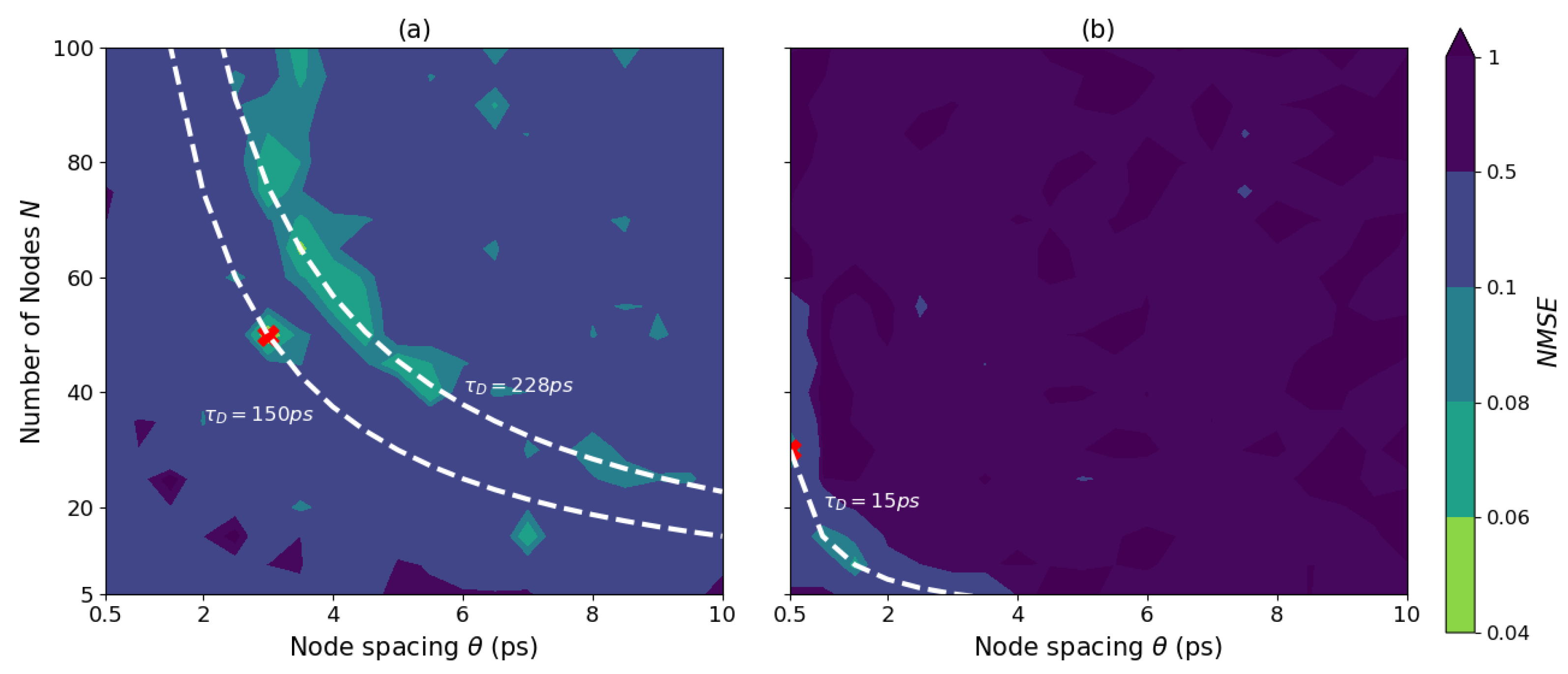
3.1. The Role of Delay Time
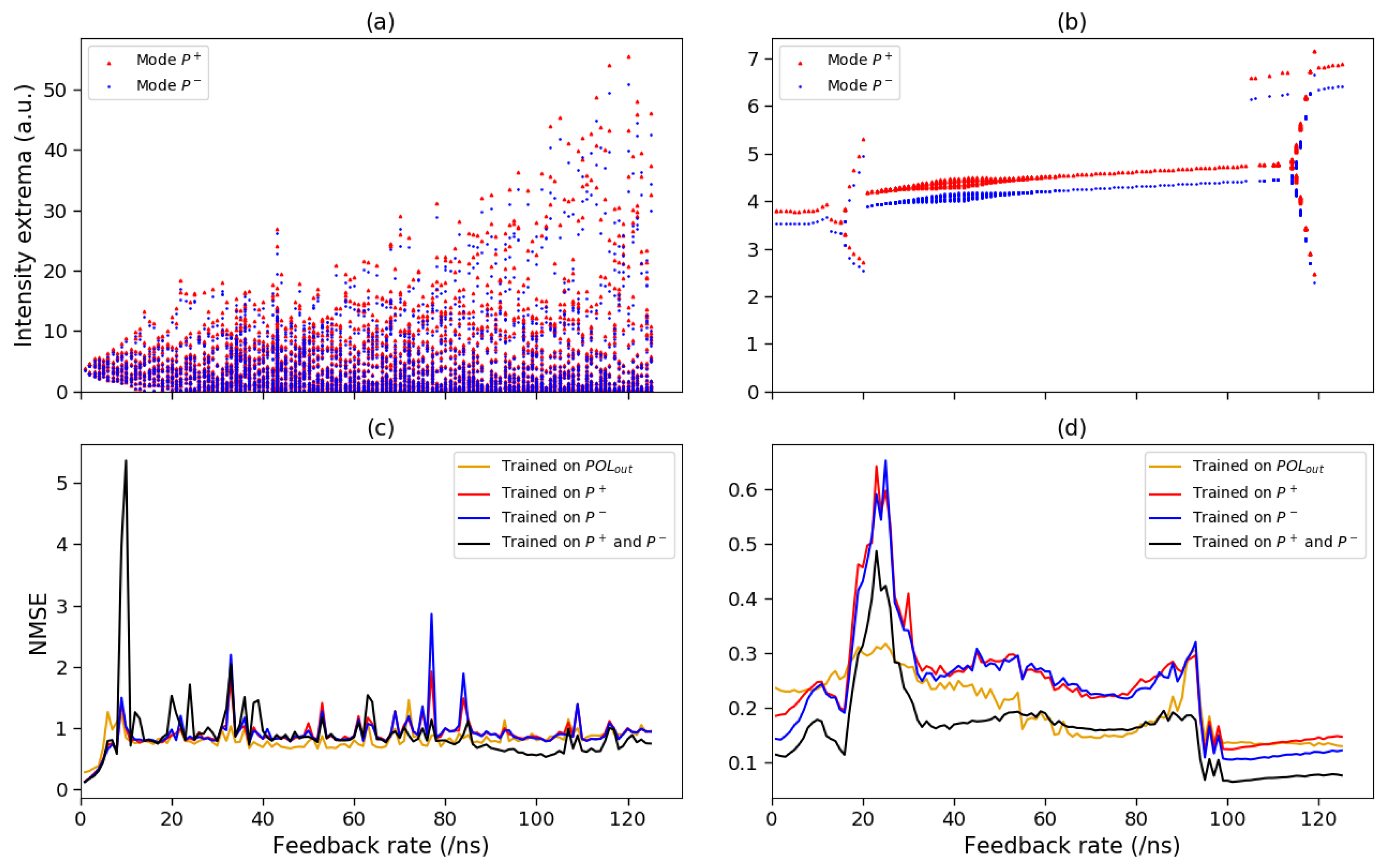
3.2. Decoupling and
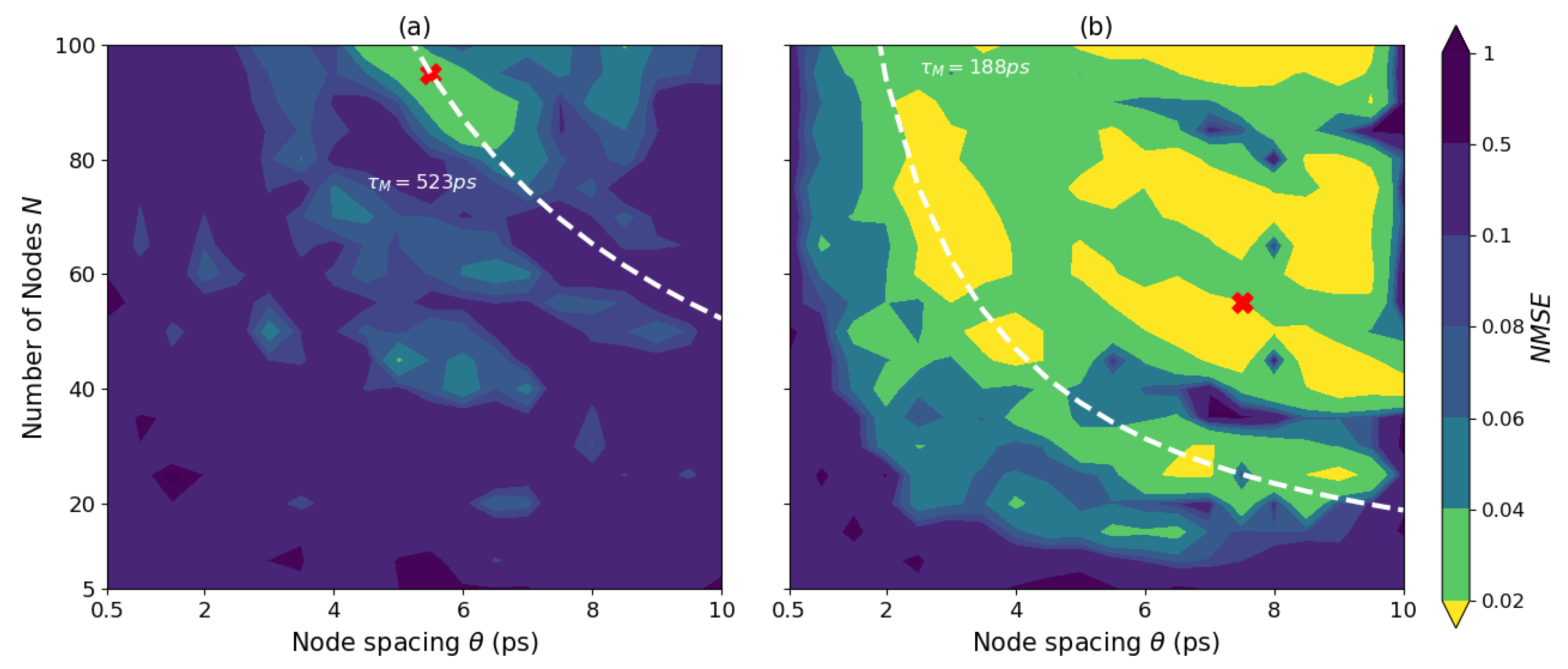
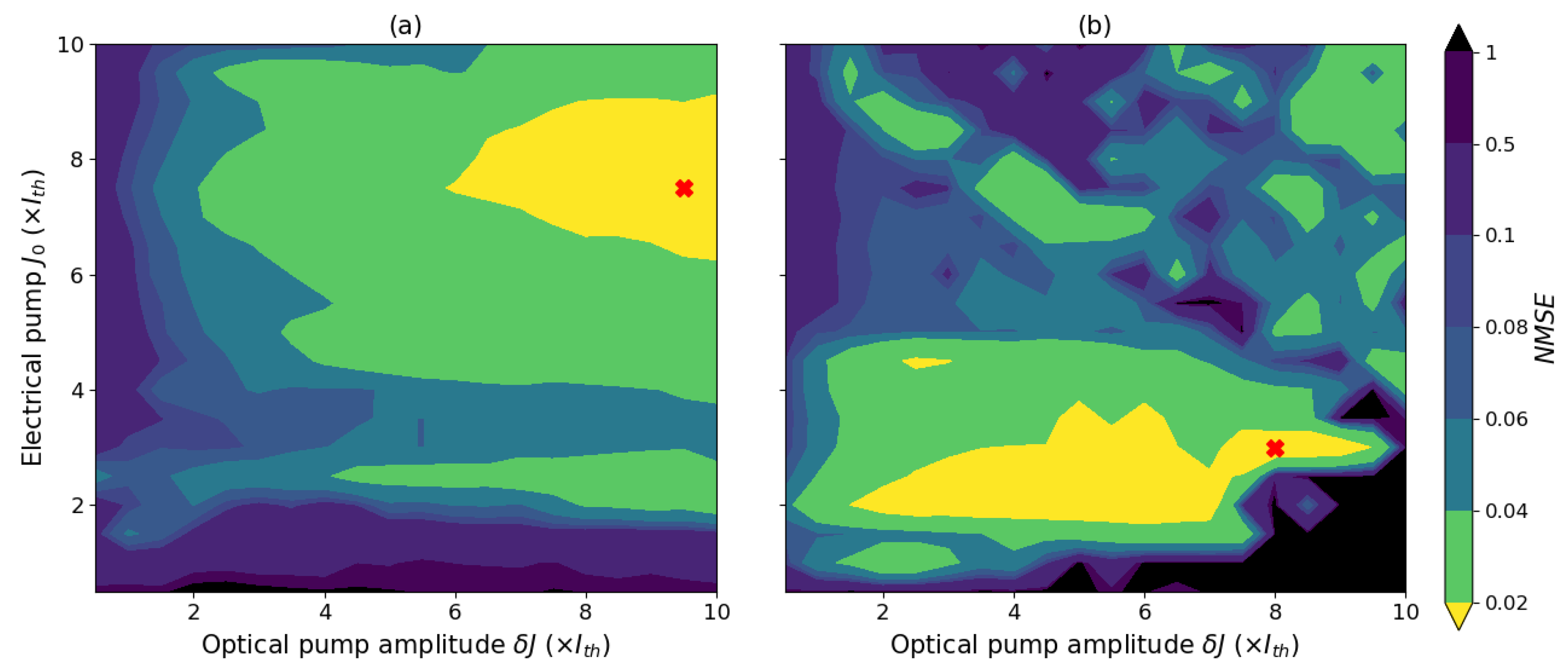
3.3. The Role of Pumping Parameters
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Manyika, J.; Chui, M.; Brown, B.; Bughin, J.; Dobbs, R.; Roxburgh, C.; Hung Byers, A. Big Data: The Next Frontier for Innovation, Competition, and Productivity; McKinsey Global Institute: Washington, DC, USA, 2011. [Google Scholar]
- Araujo, F.A.; Riou, M.; Torrejon, J.; Tsunegi, S.; Querlioz, D.; Yakushiji, K.; Fukushima, A.; Kubota, H.; Yuasa, S.; Stiles, M.D.; et al. Role of non-linear data processing on speech recognition task in the framework of reservoir computing. Sci. Rep. 2020, 10, 1–11. [Google Scholar]
- Van der Sande, G.; Brunner, D.; Soriano, M.C. Advances in photonic reservoir computing. Nanophotonics 2017, 6, 561–576. [Google Scholar] [CrossRef]
- Tanaka, G.; Yamane, T.; Héroux, J.B.; Nakane, R.; Kanazawa, N.; Takeda, S.; Numata, H.; Nakano, D.; Hirose, A. Recent advances in physical reservoir computing: A review. Neural Netw. 2019, 115, 100–123. [Google Scholar] [CrossRef] [PubMed]
- Lugnan, A.; Katumba, A.; Laporte, F.; Freiberger, M.; Sackesyn, S.; Ma, C.; Gooskens, E.; Dambre, J.; Bienstman, P. Photonic neuromorphic information processing and reservoir computing. APL Photonics 2020, 5, 020901. [Google Scholar] [CrossRef]
- Jaeger, H. Short Term Memory in Echo State Networks; GMD-Forschungszentrum Informationstechnik: Bremen, Germany, 2001; Volume 5. [Google Scholar]
- Grigoryeva, L.; Ortega, J.P. Echo state networks are universal. Neural Netw. 2018, 108, 495–508. [Google Scholar] [CrossRef] [Green Version]
- Maass, W.; Natschläger, T.; Markram, H. Real-time computing without stable states: A new framework for neural computation based on perturbations. Neural Comput. 2002, 14, 2531–2560. [Google Scholar] [CrossRef] [PubMed]
- Maass, W. Liquid state machines: Motivation, theory, and applications. In Computability in Context: Computation and Logic in the Real World; World Scientific: Singapore, 2011; pp. 275–296. [Google Scholar]
- Kulkarni, M.S.; Teuscher, C. Memristor-based reservoir computing. In Proceedings of the 2012 IEEE/ACM International Symposium on Nanoscale Architectures (NANOARCH), Amsterdam, The Netherlands, 4–6 July 2012; pp. 226–232. [Google Scholar]
- Vandoorne, K.; Mechet, P.; Van Vaerenbergh, T.; Fiers, M.; Morthier, G.; Verstraeten, D.; Schrauwen, B.; Dambre, J.; Bienstman, P. Experimental demonstration of reservoir computing on a silicon photonics chip. Nat. Commun. 2014, 5, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Denis-Le Coarer, F.; Sciamanna, M.; Katumba, A.; Freiberger, M.; Dambre, J.; Bienstman, P.; Rontani, D. All-optical reservoir computing on a photonic chip using silicon-based ring resonators. IEEE J. Sel. Top. Quantum Electron. 2018, 24, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Brunner, D.; Fischer, I. Reconfigurable semiconductor laser networks based on diffractive coupling. Opt. Lett. 2015, 40, 3854–3857. [Google Scholar] [CrossRef] [Green Version]
- Appeltant, L.; Soriano, M.C.; Van der Sande, G.; Danckaert, J.; Massar, S.; Dambre, J.; Schrauwen, B.; Mirasso, C.R.; Fischer, I. Information processing using a single dynamical node as complex system. Nat. Commun. 2011, 2, 1–6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paquot, Y.; Duport, F.; Smerieri, A.; Dambre, J.; Schrauwen, B.; Haelterman, M.; Massar, S. Optoelectronic reservoir computing. Sci. Rep. 2012, 2, 1–6. [Google Scholar] [CrossRef]
- Larger, L.; Baylón-Fuentes, A.; Martinenghi, R.; Udaltsov, V.S.; Chembo, Y.K.; Jacquot, M. High-speed photonic reservoir computing using a time-delay-based architecture: Million words per second classification. Phys. Rev. X 2017, 7, 011015. [Google Scholar] [CrossRef]
- Brunner, D.; Soriano, M.C.; Mirasso, C.R.; Fischer, I. Parallel photonic information processing at gigabyte per second data rates using transient states. Nat. Commun. 2013, 4, 1–7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguimdo, R.M.; Verschaffelt, G.; Danckaert, J.; Van der Sande, G. Fast photonic information processing using semiconductor lasers with delayed optical feedback: Role of phase dynamics. Opt. Express 2014, 22, 8672–8686. [Google Scholar] [CrossRef] [PubMed]
- Harkhoe, K.; Van der Sande, G. Delay-based reservoir computing using multimode semiconductor lasers: Exploiting the rich carrier dynamics. IEEE J. Sel. Top. Quantum Electron. 2019, 25, 1–9. [Google Scholar] [CrossRef]
- Harkhoe, K.; Van der Sande, G. Task-independent computational abilities of semiconductor lasers with delayed optical feedback for reservoir computing. Photonics 2019, 6, 124. [Google Scholar] [CrossRef] [Green Version]
- Takano, K.; Sugano, C.; Inubushi, M.; Yoshimura, K.; Sunada, S.; Kanno, K.; Uchida, A. Compact reservoir computing with a photonic integrated circuit. Opt. Express 2018, 26, 29424–29439. [Google Scholar] [CrossRef]
- Harkhoe, K.; Verschaffelt, G.; Katumba, A.; Bienstman, P.; Van der Sande, G. Demonstrating delay-based reservoir computing using a compact photonic integrated chip. Opt. Express 2020, 28, 3086–3096. [Google Scholar] [CrossRef]
- San Miguel, M.; Feng, Q.; Moloney, J.V. Light-polarization dynamics in surface-emitting semiconductor lasers. Phys. Rev. A 1995, 52, 1728. [Google Scholar] [CrossRef]
- Martin-Regalado, J.; Prati, F.; San Miguel, M.; Abraham, N. Polarization properties of vertical-cavity surface-emitting lasers. IEEE J. Quantum Electron. 1997, 33, 765–783. [Google Scholar] [CrossRef] [Green Version]
- Gahl, A.; Balle, S.; Miguel, M.S. Polarization dynamics of optically pumped VCSELs. IEEE J. Quantum Electron. 1999, 35, 342–351. [Google Scholar] [CrossRef]
- Lindemann, M.; Xu, G.; Pusch, T.; Michalzik, R.; Hofmann, M.R.; Žutić, I.; Gerhardt, N.C. Ultrafast spin-lasers. Nature 2019, 568, 212–215. [Google Scholar] [CrossRef]
- Vatin, J.; Rontani, D.; Sciamanna, M. Experimental reservoir computing using VCSEL polarization dynamics. Opt. Express 2019, 27, 18579–18584. [Google Scholar] [CrossRef]
- Guo, X.X.; Xiang, S.Y.; Zhang, Y.H.; Lin, L.; Wen, A.J.; Hao, Y. Polarization multiplexing reservoir computing based on a VCSEL with polarized optical feedback. IEEE J. Sel. Top. Quantum Electron. 2019, 26, 1–9. [Google Scholar] [CrossRef]
- Weigend, A.S.; Gershenfeld, N.A. Results of the time series prediction competition at the Santa Fe Institute. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; pp. 1786–1793. [Google Scholar]
- Dambre, J.; Verstraeten, D.; Schrauwen, B.; Massar, S. Information processing capacity of dynamical systems. Sci. Rep. 2012, 2, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Köster, F.; Ehlert, D.; Lüdge, K. Limitations of the Recall Capabilities in Delay-Based Reservoir Computing Systems. Cogn. Comput. 2020, 1–8. [Google Scholar] [CrossRef]
- Song, T.; Xie, Y.; Ye, Y.; Liu, B.; Chai, J.; Jiang, X.; Zheng, Y. Numerical Analysis of Nonlinear Dynamics Based on Spin-VCSELs with Optical Feedback. Photonics 2021, 8, 10. [Google Scholar] [CrossRef]
- Boedecker, J.; Obst, O.; Lizier, J.T.; Mayer, N.M.; Asada, M. Information processing in echo state networks at the edge of chaos. Theory Biosci. 2012, 131, 205–213. [Google Scholar] [CrossRef] [PubMed]
- Chrol-Cannon, J.; Jin, Y. On the correlation between reservoir metrics and performance for time series classification under the influence of synaptic plasticity. PLoS ONE 2014, 9, e101792. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Linewidth enhancement factor | 5 | |
| Carrier decay rate | 1 ns | |
| Photon lifetime | 1.54 ps | |
| Spin decay rate | 450 ns | |
| Linear dichroism | −1.16 ns | |
| Linear birefringence | GHz | |
| Amplitude saturation factor | ||
| Phase saturation factor | ||
| Electrical pump | , unless mentioned otherwise. | |
| Optical pump amplitude | , unless mentioned otherwise. | |
| Constant feedback phase | 0 | |
| Mask length | ||
| Delay time | scanned from 2.5 ps to 1 ns | |
| Feedback rate | scanned from 1 to 100 ns | |
| Number of nodes | N | scanned from 5 to 100 |
| Node spacing | scanned from to 10 ps |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harkhoe, K.; Verschaffelt, G.; Van der Sande, G. Neuro-Inspired Computing with Spin-VCSELs. Appl. Sci. 2021, 11, 4232. https://doi.org/10.3390/app11094232
Harkhoe K, Verschaffelt G, Van der Sande G. Neuro-Inspired Computing with Spin-VCSELs. Applied Sciences. 2021; 11(9):4232. https://doi.org/10.3390/app11094232
Chicago/Turabian StyleHarkhoe, Krishan, Guy Verschaffelt, and Guy Van der Sande. 2021. "Neuro-Inspired Computing with Spin-VCSELs" Applied Sciences 11, no. 9: 4232. https://doi.org/10.3390/app11094232
APA StyleHarkhoe, K., Verschaffelt, G., & Van der Sande, G. (2021). Neuro-Inspired Computing with Spin-VCSELs. Applied Sciences, 11(9), 4232. https://doi.org/10.3390/app11094232