
Magnetically Deployable Robots Using Layered Lamina Emergent Mechanism



Abstract
:1. Introduction
1.1. Actuation Mechanisms

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuation | Characteristics | Advantages | Disadvantages |
|---|---|---|---|
| Smart memory alloys (SMA) |
| ||
| Dielectric elastomer (DEA) |
|
| |
| Pneumatic |
|
| |
| Motors |
|
|
|
| Magnetic |
|
|
1.2. Biomimetic Locomotion
2. Materials and Methods
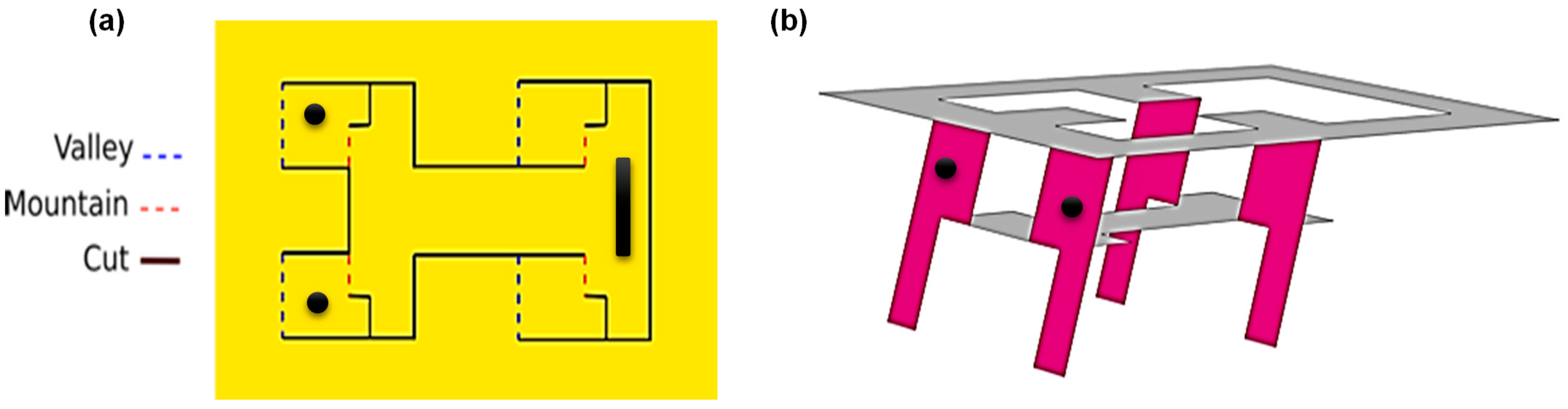
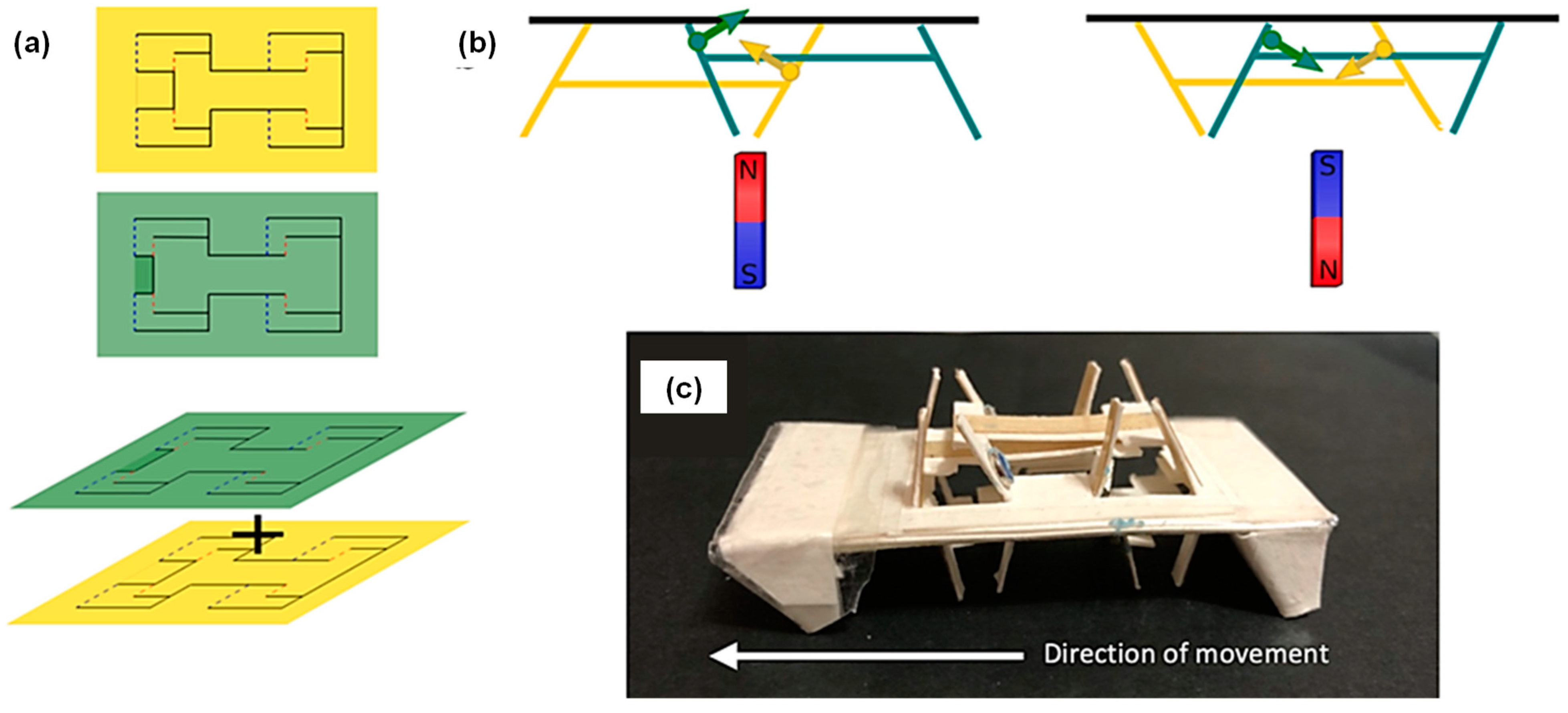
2.1. Origami and Kirigami for LEM
2.2. Magnetic Actuation
2.3. Locomotion Mechanism
2.4. Lamina Emergent Mechanism
3. Results
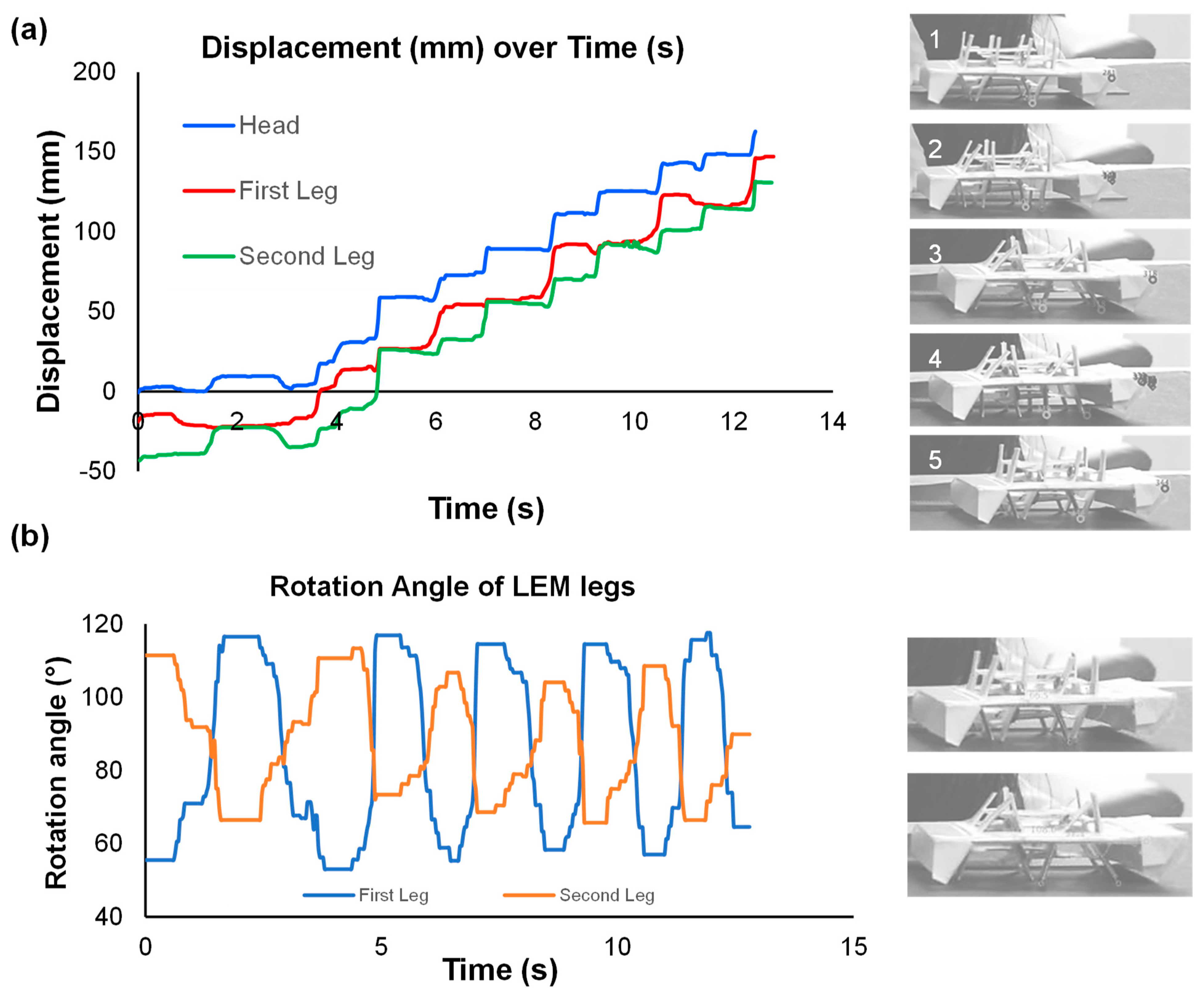
3.1. Relationship between Leg Locomotion and Actuating Magnet
3.2. Triangular Prism Locomotion
3.3. SLEM Locomotion
3.4. AMDLEM Locomotion
4. Discussion
4.1. Comparison of Triangular Prism, SLEM, and AMDLEM Locomotion
4.2. Effect of Actuation Frequency on Speed of SLEM Robot
4.3. Effect of Friction
4.4. Effect of Leg Length
4.5. Stiffness of Structure
4.6. Compressibility and Load-Bearing Capability
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, Y.; Chen, Y.; Zhu, L.; Yan, Y.; Chen, X. A novel slithering locomotion mechanism for a snake-like soft robot. J. Mech. Phys. Solids 2017, 99, 304–320. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Seok, S.; Onal, C.D.; Wood, R.; Rus, D.; Kim, S. Peristaltic locomotion with antagonistic actuators in soft robotics. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1228–1233. [Google Scholar] [CrossRef]
- Shian, S.; Bertoldi, K.; Clarke, D.R. Dielectric Elastomer Based ‘Grippers’ for Soft Robotics. Adv. Mater. 2015, 27, 6814–6819. [Google Scholar] [CrossRef]
- Wang, W.; Lee, J.-Y.; Rodrigue, H.; Song, S.-H.; Chu, W.-S.; Ahn, S.-H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef]
- Seok, S.; Onal, C.D.; Cho, K.; Wood, R.J.; Rus, D.; Kim, S. Meshworm: A Peristaltic Soft Robot With Antagonistic Nickel Titanium Coil Actuators. IEEE/ASME Trans. Mechatron. 2013, 18, 1485–1497. [Google Scholar] [CrossRef]
- Onal, C.D.; Wood, R.J.; Rus, D. An Origami-Inspired Approach to Worm Robots. IEEE/ASME Trans. Mechatron. 2013, 18, 430–438. [Google Scholar] [CrossRef]
- Fang, H.; Zhang, Y.; Wang, K.W. Origami-based earthworm-like locomotion robots. Bioinspir. Biomim. 2017, 12, 065003. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.-T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef]
- Menciassi, D.A.; Gorini, S.; Dario, P. Development of a biomimetic miniature robotic crawler. Auton. Robots 2006, 21, 155–163. [Google Scholar] [CrossRef]
- Cianchetti, M.; Mattoli, V.; Mazzolai, B.; Laschi, C.; Dario, P. A new design methodology of electrostrictive actuators for bio-inspired robotics. Sens. Actuators B Chem. 2019, 142, 288–297. [Google Scholar] [CrossRef]
- O’Halloran, A.; O’Malley, F.; McHugh, P. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Boyraz, P.; Runge, G.; Raatz, A. An Overview of Novel Actuators for Soft Robotics. Actuators 2018, 7, 48. [Google Scholar] [CrossRef] [Green Version]
- Jiang, S.; Feng, W.; Lou, J.; Yang, Z.; Liu, J.; Yang, J. Modelling and control of a five-degrees-of-freedom pneumatically actuated magnetic resonance-compatible robot. Int. J. Med. Robot. 2014, 10, 170–179. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef] [PubMed]
- Song, C.-W.; Lee, D.-J.; Lee, S.-Y. Bioinspired Segment Robot with Earthworm-like Plane Locomotion. J. Bionic Eng. 2016, 13, 292–302. [Google Scholar] [CrossRef]
- Jang, B.; Nam, J.; Lee, W.; Jang, G. A Crawling Magnetic Robot Actuated and Steered via Oscillatory Rotating External Magnetic Fields in Tubular Environments. IEEE/ASME Trans. Mechatron. 2017, 22, 1465–1472. [Google Scholar] [CrossRef]
- Onal, C.D.; Rus, D. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef]
- Saito, T.; Kagiwada, T.; Harada, H. Development of an Earthworm Robot with a Shape Memory Alloy and Braided Tube. Adv. Robot. 2009, 23, 1743–1760. [Google Scholar] [CrossRef]
- Liu, B.; Ozkan-Aydin, Y.; Goldman, D.I.; Hammond, F.L. Kirigami skin improves soft earthworm robot anchoring and locomotion under cohesive soil. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 828–833. [Google Scholar]
- Ge, J.Z.; Calderón, A.A.; Chang, L.; Pérez-Arancibia, N.O. An earthworm-inspired friction-controlled soft robot capable of bidirectional locomotion. Bioinspir. Biomim. 2019, 14, 036004. [Google Scholar] [CrossRef]
- Jung, K.; Koo, J.C.; Nam, J.; Lee, Y.K.; Choi, H.R. Artificial annelid robot driven by soft actuators. Bioinspir. Biomim. 2007, 2, S42–S49. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, K.; Yan, G.; Ma, G.; Ye, D. An Earthworm-Like Robotic Endoscope System for Human Intestine: Design, Analysis, and Experiment. Ann. Biomed. Eng. 2009, 37, 210–221. [Google Scholar] [CrossRef] [PubMed]
- Zuo, J.; Yan, G.; Gao, Z. A micro creeping robot for colonoscopy based on the earthworm. J. Med. Eng. Technol. 2005, 29, 1–7. [Google Scholar] [CrossRef]
- Manfredi, L.; Capoccia, E.; Ciuti, G.; Cuschier, A.I. A Soft Pneumatic Inchworm Double balloon (SPID) for colonoscopy. Sci. Rep. Nat. Publ. Group Lond. 2019, 9, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, S.H.; Hashi, S.; Ishiyama, K. Hybrid magnetic mechanism for active locomotion based on inchworm motion. Smart Mater. Struct. 2012, 22, 027001. [Google Scholar] [CrossRef]
- Lee, K.; Kim, Y.; Paik, J.K.; Shin, B. Clawed Miniature Inchworm Robot Driven by Electromagnetic Oscillatory Actuator. J. Bionic Eng. 2015, 12, 519–526. [Google Scholar] [CrossRef]
- Ito, T.; Ogushi, T.; Hayashi, T. Impulse-driven capsule by coil-induced magnetic field implementation. Mech. Mach. Theory 2010, 45, 1642–1650. [Google Scholar] [CrossRef]
- Min, H.-J.; Lim, H.-J.; Kim, S.H. A new impact actuator using linear momentum exchange of inertia mass. J. Med. Eng. Technol. 2002, 26, 265–269. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Lu, H.; Zhang, M.; Yang, Y.; Huang, Q. A bioinspired multi-legged soft millirobot that functions in both dry and wet conditions. Nat. Commun. Lond. 2018, 9, 3944. [Google Scholar] [CrossRef] [Green Version]
- Yesin, K.B.; Vollmers, K.; Nelson, B.J. Modeling and Control of Untethered Biomicrorobots in a Fluidic Environment Using Electromagnetic Fields. J. Robot. Res. 2006, 25, 527–536. [Google Scholar] [CrossRef]
- Rafsanjani, Y.; Zhang, B.; Liu, S.; Rubinstein, M.; Bertoldi, K. Kirigami skins make a simple soft actuator crawl. Sci. Robot. 2018, 3, eaar7555. [Google Scholar] [CrossRef] [Green Version]
- Ge, J.Z.; Calderón, A.A.; Pérez-Arancibia, N.O. An earthworm-inspired soft crawling robot controlled by friction. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Parisian Macao, China, 5–8 December 2017; pp. 834–841. [Google Scholar] [CrossRef] [Green Version]
- Callens, S.J.P.; Zadpoor, A.A. From flat sheets to curved geometries: Origami and kirigami approaches. Mater. Today 2018, 21, 241–264. [Google Scholar] [CrossRef]
- Erb, R.M.; Martin, J.J.; Soheilian, R.; Pan, C.; Barber, J.R. Actuating Soft Matter with Magnetic Torque. Adv. Funct. Mater. 2016, 26, 3859–3880. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Zhou, X.; Majidi, C.; O’Reilly, O.M. Energy efficiency in friction-based locomotion mechanisms for soft and hard robots: Slower can be faster. Nonlinear Dyn. 2014, 78, 2811–2821. [Google Scholar] [CrossRef] [Green Version]
- Marvi, H.; Cook, J.P.; Streator, J.L.; Hu, D.L. Snakes move their scales to increase friction. Biotribology 2016, 5, 52–60. [Google Scholar] [CrossRef] [Green Version]
- Marvi, H.; Han, Y.; Sitti, M. Actively controlled fibrillar friction surfaces. Appl. Phys. Lett. 2015, 106, 51602. [Google Scholar] [CrossRef] [Green Version]
- Jacobsen, J.O.; Winder, B.G.; Howell, L.L.; Magleby, S.P. Lamina Emergent Mechanisms and Their Basic Elements. J. Mech. Robot. 2010, 2, 011003. [Google Scholar] [CrossRef]
- Ma, R.; Wu, C.; Wang, Z.L.; Tsukruk, V.V. Pop-Up Conducting Large-Area Biographene Kirigami. ACS Nano 2018, 12, 9714–9720. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Peng, R.; You, Z. Origami of thick panels. Science 2015, 349, 396–400. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, T.; Zou, Z.; Mao, G.; Yang, X.; Liang, Y.; Li, C.; Qu, S.; Suo, Z.; Yang, W. Agile and Resilient Insect-Scale Robot. Soft Robot. 2019, 6, 133–141. [Google Scholar] [CrossRef] [PubMed]
- Origami Simulator. Available online: http://www.amandaghassaei.com/projects/origami_simulator/ (accessed on 7 May 2020).
- Miyashita, S.; Guitron, S.; Li, S.; Rus, D. Robotic metamorphosis by origami exoskeletons. Sci. Robot. 2017, 2, eaao4369. [Google Scholar] [CrossRef] [PubMed] [Green Version]

















| Components | Locomotion |
|---|---|
| Two permanent magnet discs on two flaps, OOP magnetization; Same direction placement | Flaps move in sync to actuating magnet. Able to locomote, unstable Require soft magnet on the base as an anchor |
| Thick MRE sheets on two flaps, OOP magnetization; Opposite direction placement | Flaps move out of sync Able to locomote, more stable as one magnet moves the flap while the other magnet is attracted to the surface, providing anchoring. |
| Thin MRE sheet as the entire base with flaps | Flips when actuated as it is not anchored. Hard to control the direction |
| Thick MRE attached to only the flaps, OOP magnetization; Same direction | Flaps move in sync to actuating magnet. Able to locomote, unstable Require soft magnet on the base as an anchor |
| Thick MRE attached to only the flaps, IP magnetization; Same direction | Reacts most obviously to actuating magnetic field, compared to the rest Flaps pop up straight when the actuating magnet is directly below → Could be unstable |
| Mechanism Type | Body Length (mm) | Leg Length (mm) | Foot-to-Foot Spacing (mm) | Weight (g) | Average Step Size (mm) ± SD | Step Size/Foot length (%) | Step Size/Body Length (%) | Average Velocity (mm/s) |
|---|---|---|---|---|---|---|---|---|
| Triangular prism | 21 | 4 | 9 | 0.36 | 6.48 ± 0.69 | 161.9 | 30.8 | 4.39 |
| SLEM | 68 | 10 | 20 | 1.18 | 17.7 ± 2.47 | 177.0 | 26.0 | 10.8 |
| AMDLEM | 68 | 14 | 12 | 5 | 29.62 | 211.6 | 43.6 | 12.4 |
| Material | Time Taken to Complete 15 cm (s) | No. of Cycles | Speed (mm/s) | Stride Length (mm) |
|---|---|---|---|---|
| Paper | 16.1 | 8 | 9.32 | 18.75 |
| Foam | 14.9 | 7 | 10.07 | 21.43 |
| Bubble wrap | 22.4 | 11 | 6.70 | 13.64 |
| Towel (woven cotton) | 20.7 | 9 | 7.25 | 16.67 |
| Surface | Angle Forward | Angle Backward | Coefficient of Friction | |
|---|---|---|---|---|
| Forward Friction μf | Backward Friction μb | |||
| Paper | 22.4 | 27.9 | 0.41 | 0.53 |
| Foam | 37.6 | 40.3 | 0.77 | 0.85 |
| Bubble wrap | 70.2 | 85.4 | 2.78 | 12.43 |
| Towel (woven cotton) | 59.5 | 71.3 | 1.70 | 2.95 |
| Type | Leg Length (mm) | Propulsion Force (Newton) | |
|---|---|---|---|
| Tail | Leg | ||
| 300 gsm paper | 10 | 0.007 | 0.010 |
| 20 | 0.238 | 0.203 | |
| 70 gsm paper | 10 | 0.014 | 0.049 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giang, T.N.L.; Cai, C.J.; Ponraj, G.; Ren, H. Magnetically Deployable Robots Using Layered Lamina Emergent Mechanism. Appl. Sci. 2022, 12, 14. https://doi.org/10.3390/app12010014
Giang TNL, Cai CJ, Ponraj G, Ren H. Magnetically Deployable Robots Using Layered Lamina Emergent Mechanism. Applied Sciences. 2022; 12(1):14. https://doi.org/10.3390/app12010014
Chicago/Turabian StyleGiang, Tran Nguyen Lam, Catherine Jiayi Cai, Godwin Ponraj, and Hongliang Ren. 2022. "Magnetically Deployable Robots Using Layered Lamina Emergent Mechanism" Applied Sciences 12, no. 1: 14. https://doi.org/10.3390/app12010014
APA StyleGiang, T. N. L., Cai, C. J., Ponraj, G., & Ren, H. (2022). Magnetically Deployable Robots Using Layered Lamina Emergent Mechanism. Applied Sciences, 12(1), 14. https://doi.org/10.3390/app12010014