
Magnus-Forces Analysis of Pitched-Baseball Trajectories Using YOLOv3-Tiny Deep Learning Algorithm


Abstract
:1. Introduction
2. Materials and Methods
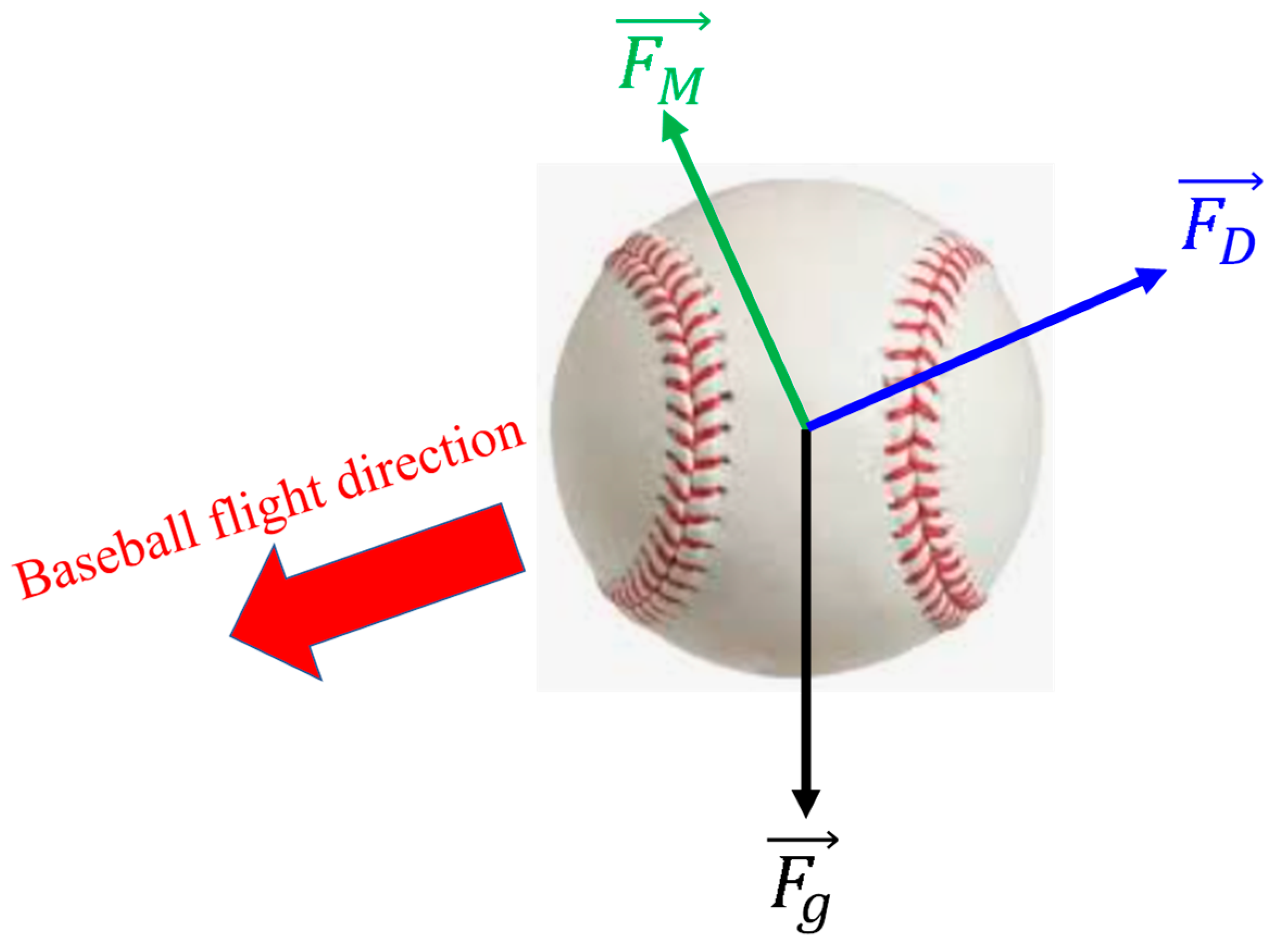
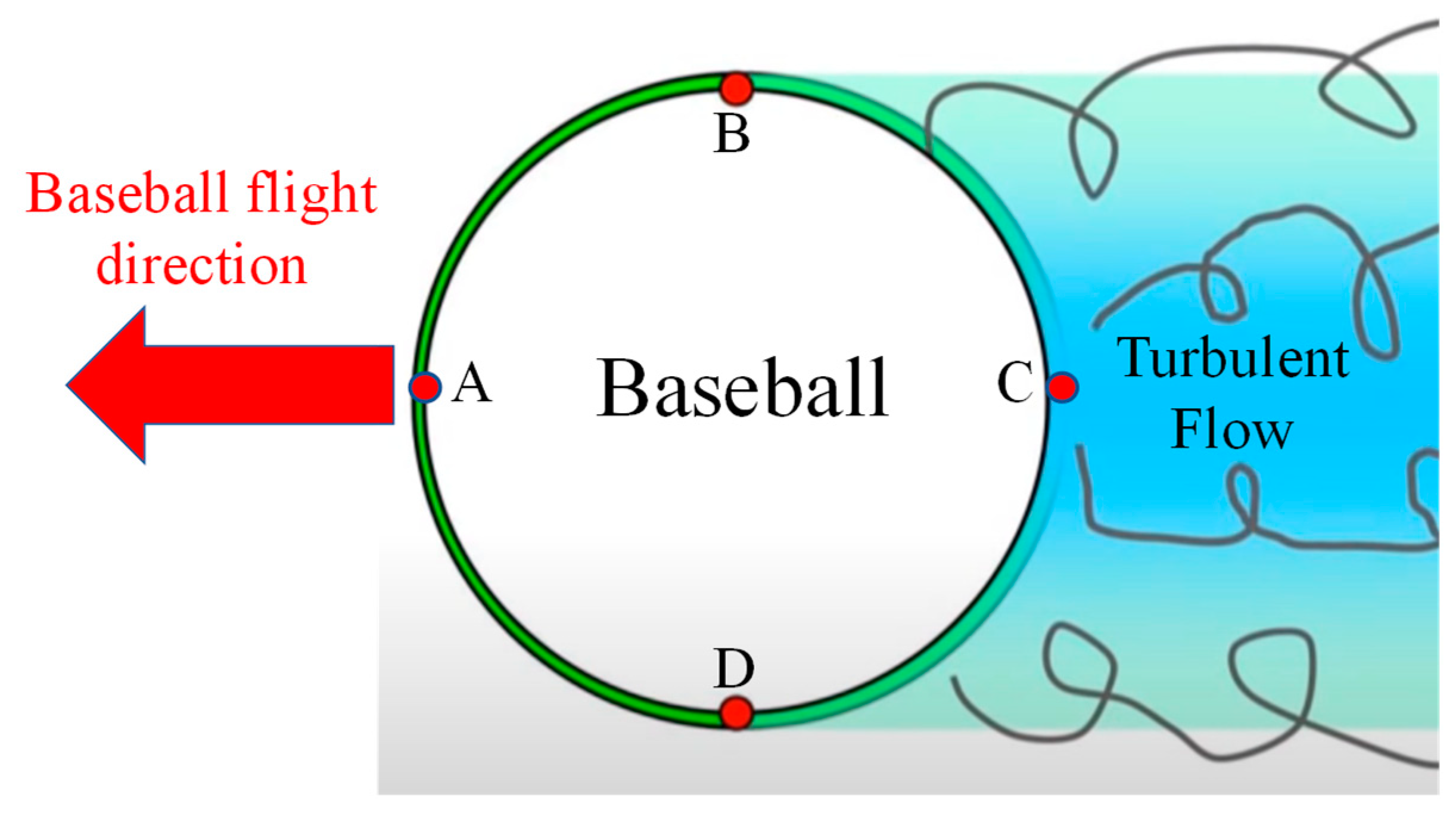
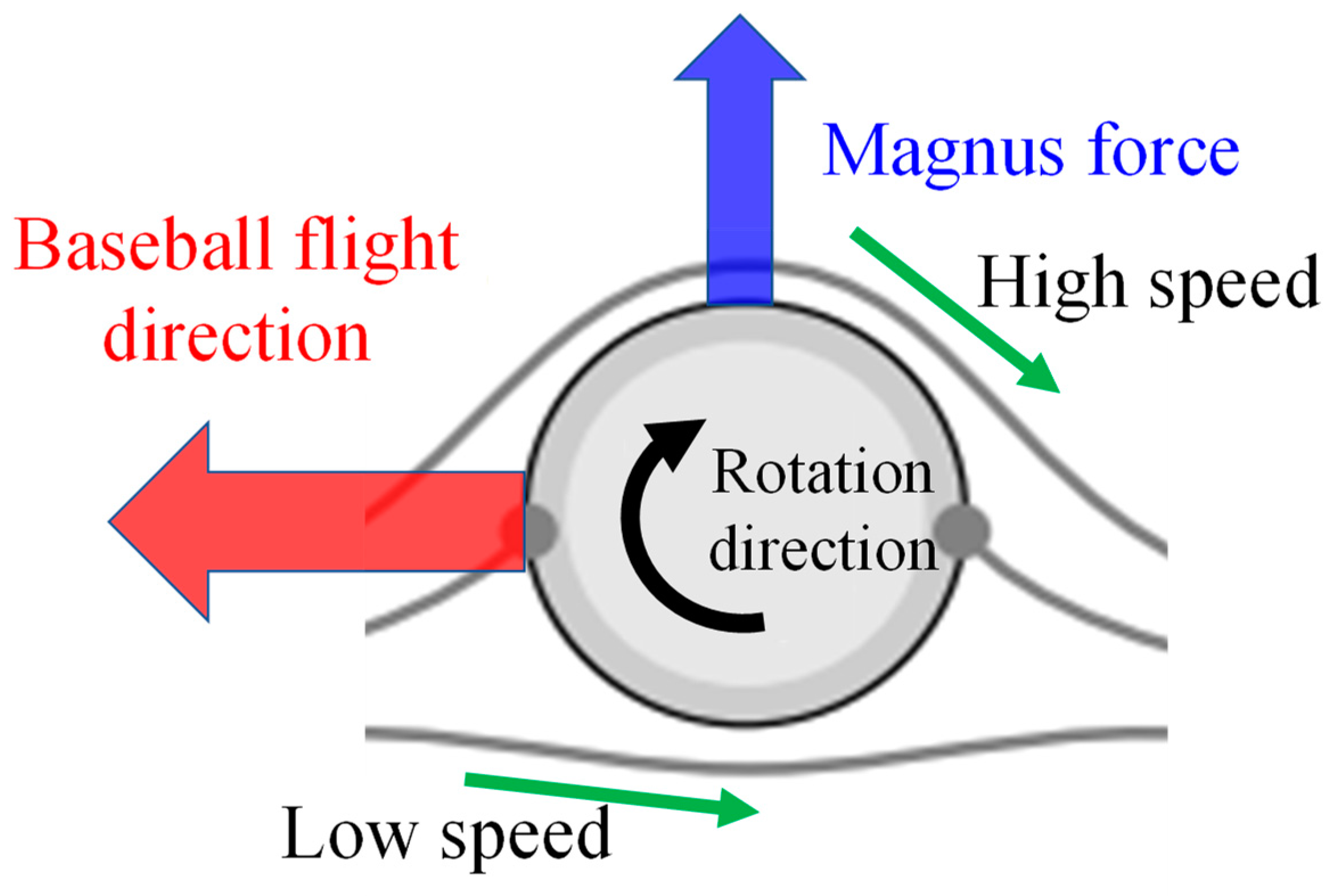
2.1. Dynamic Analysis of a Pitched-Baseball Trajectory Using Aerodynamic Theory
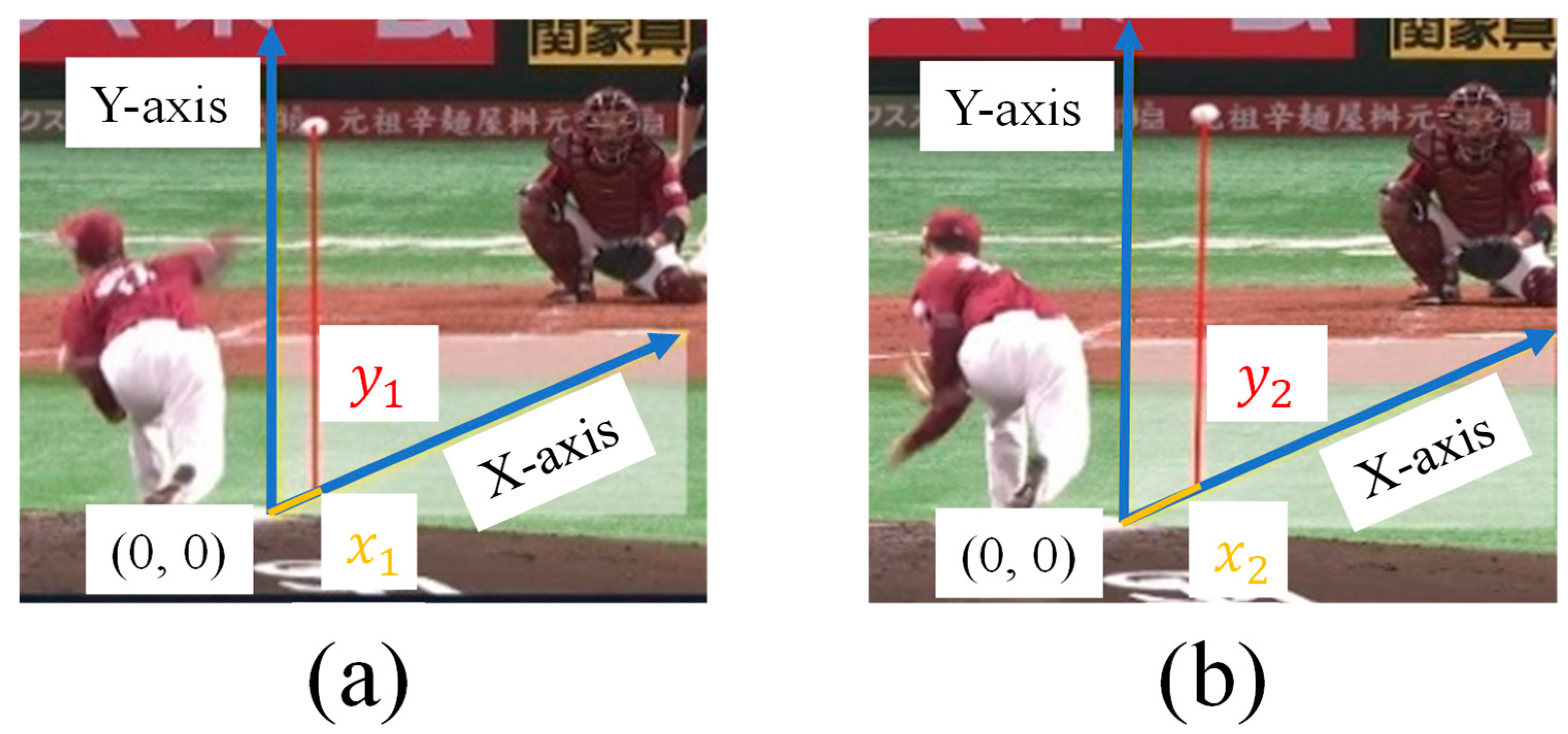
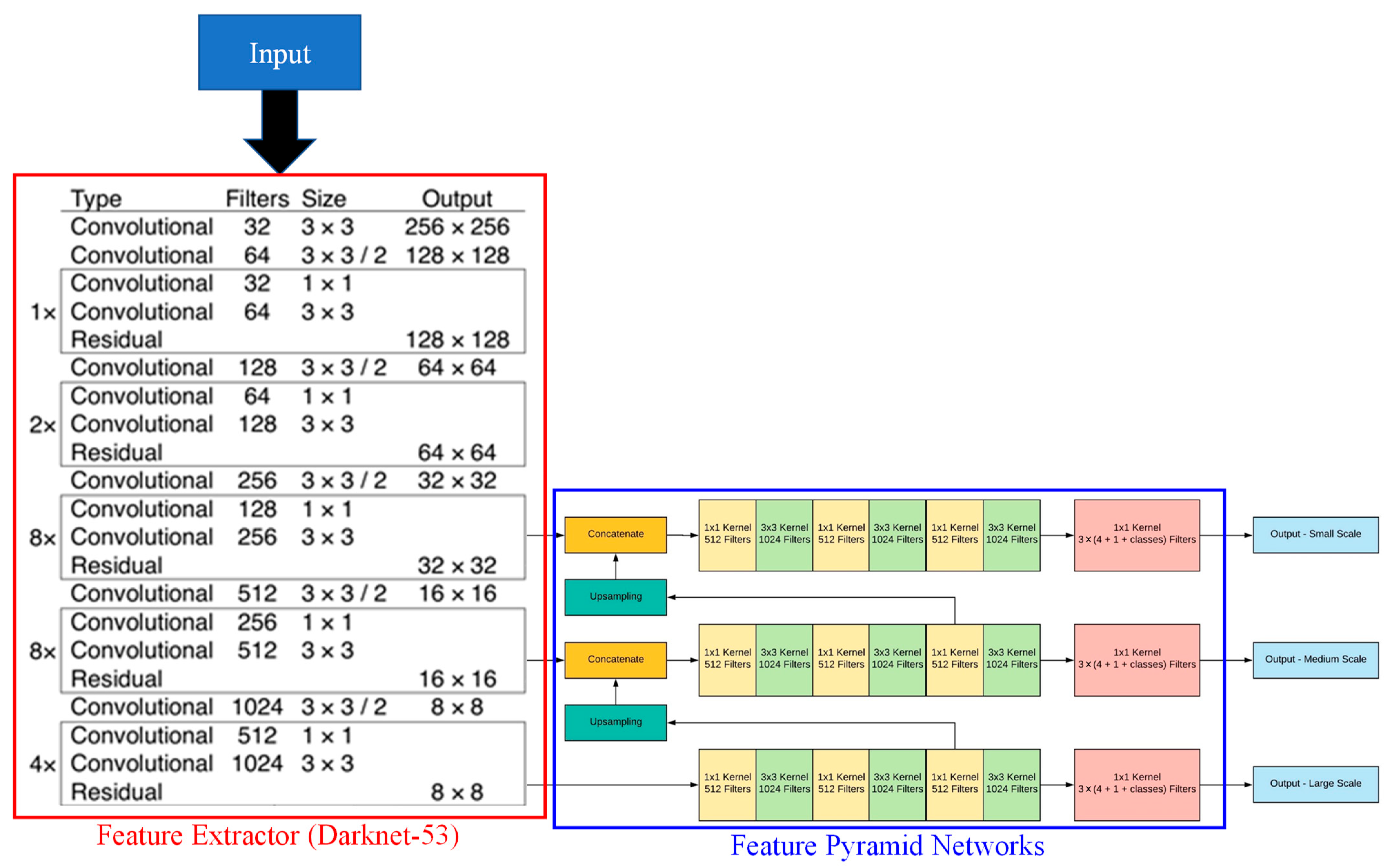
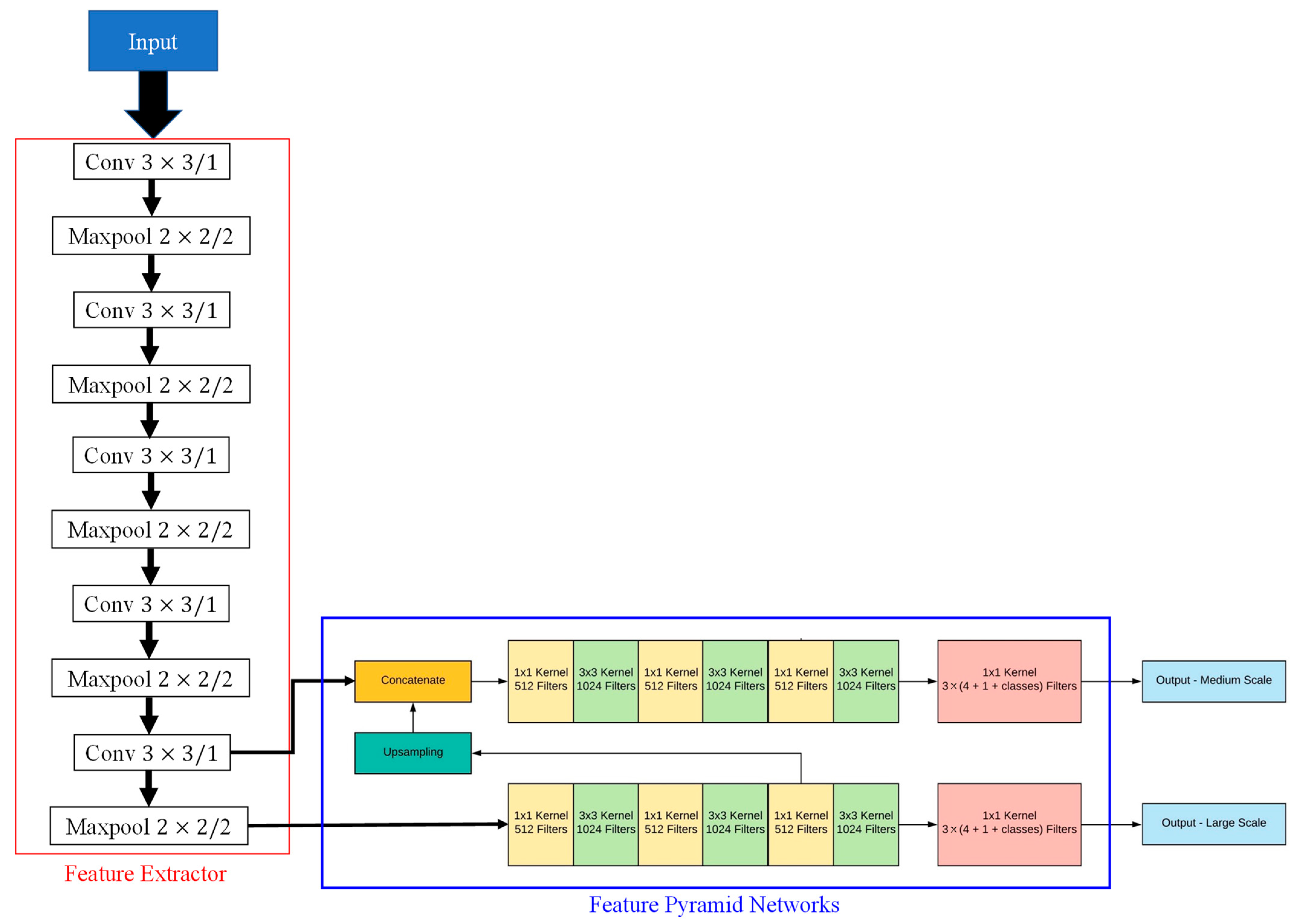
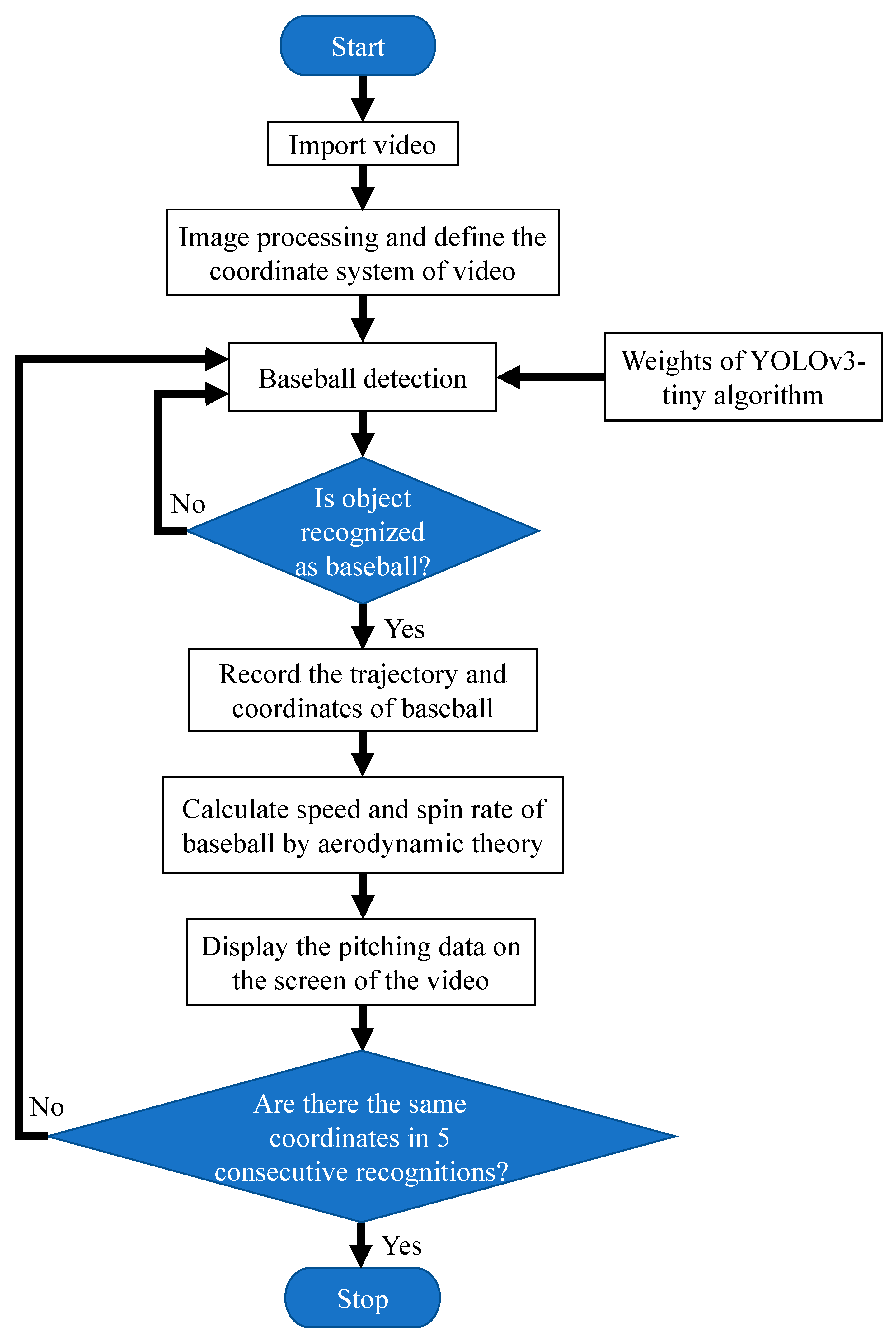
2.2. Recognition of a Pitched-Baseball Trajectory by Deep Learning Algorithm
3. Experiments
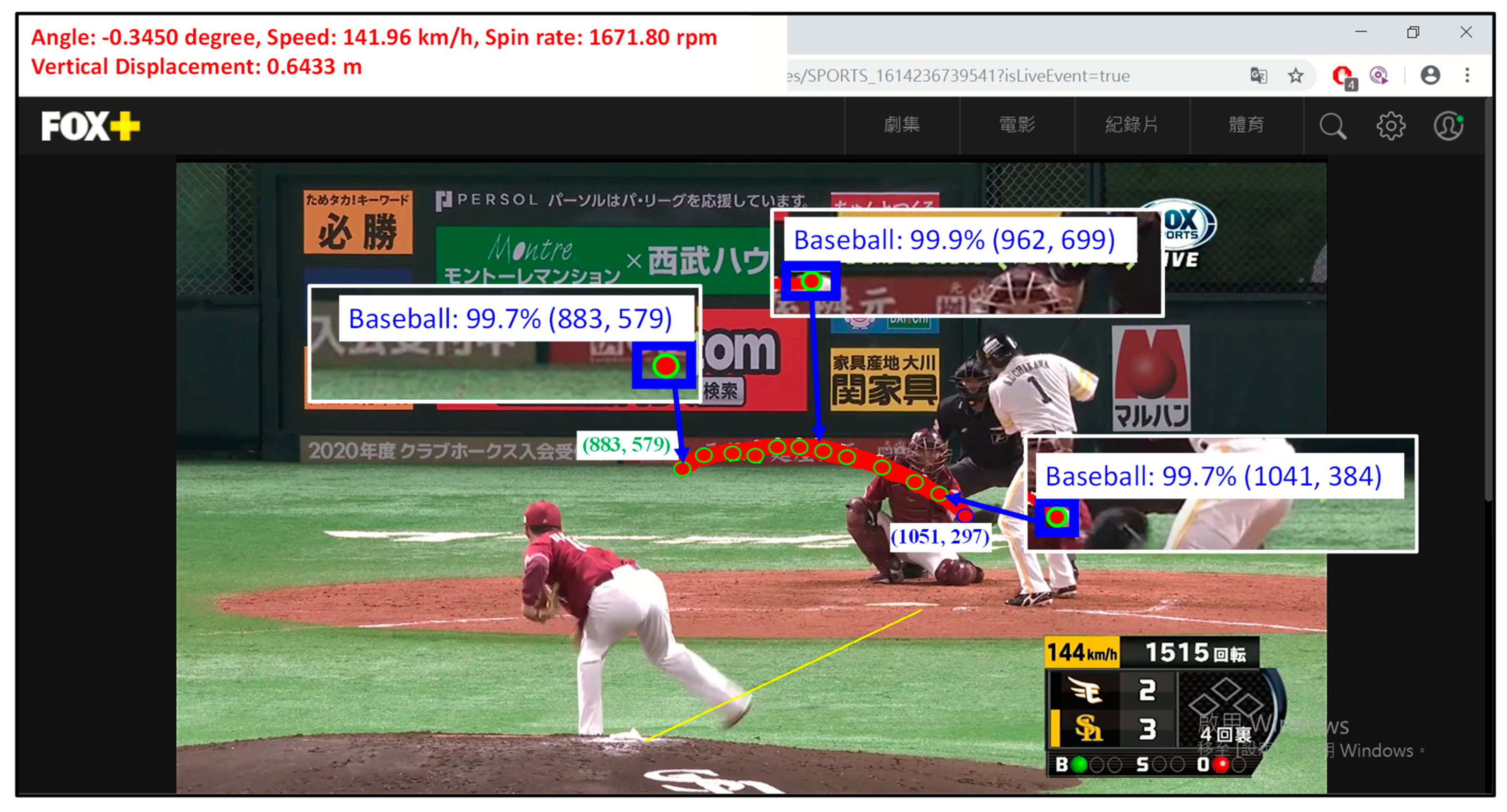
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lage, M.; Ono, J.P.; Cervone, D.; Chiang, J.; Dietrich, C.; Silva, C.T. Statcast dashboard: Exploration of spatiotemporal baseball data. IEEE Comput. Graph. Appl. 2016, 36, 28–37. [Google Scholar] [CrossRef] [PubMed]
- Kagan, D.; Nathan, A.M. Statcast and the baseball trajectory calculator. Phys. Teach. 2017, 55, 134–136. [Google Scholar] [CrossRef]
- Bailey, S.R.; Loeppky, J.; Swartz, T.B. The prediction of batting averages in major league baseball. Stats 2020, 3, 8. [Google Scholar] [CrossRef] [Green Version]
- Gerhart, P.M.; Gerhart, A.L.; Hochstein, J.I. Munson’s Fluid Mechanics, Global Edition; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017. [Google Scholar]
- Higuchi, T.; Morohoshi, J.; Nagami, T.; Nakata, H.; Kanosue, K. The effect of fastball backspin rate on baseball hitting accuracy. J. Appl. Biomech. 2013, 29, 279–284. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- BP Unfiltered: Is “Late Break” Real? Available online: https://www.baseballprospectus.com/news/article/19994/bp-unfiltered-is-late-break-real/ (accessed on 4 May 2022).
- Anderson, J.D. Ludwig Prandtl’s boundary layer. Phys. Today 2005, 58, 42–48. [Google Scholar] [CrossRef]
- Guéziec, A. Tracking pitches for broadcast television. Computer 2002, 35, 38–43. [Google Scholar] [CrossRef]
- Chen, H.T.; Chen, H.S.; Hsiao, M.H.; Tsai, W.J.; Lee, S.Y. A trajectory-based ball tracking framework with visual enrichment for broadcast baseball videos. J. Inf. Sci. Eng. 2008, 24, 143–157. [Google Scholar]
- Ijiri, T.; Nakamura, A.; Hirabayashi, A.; Sakai, W.; Miyazaki, T.; Himeno, R. Automatic spin measurements for pitched Baseballs via consumer-grade high-speed cameras. Signal Image Video Process. 2017, 11, 1197–1204. [Google Scholar] [CrossRef]
- López, A.; Cuevas, F.J. Automatic multi-circle detection on images using the teaching learning based optimisation algorithm. IET Comput. Vis. 2018, 12, 1188–1199. [Google Scholar] [CrossRef]
- Islam, S.S.; Dey, E.K.; Tawhid, M.N.A.; Hossain, B.M.A. CNN Based Approach for Garments Texture Design Classification. Adv. Technol. Innov. 2017, 2, 119. [Google Scholar]
- Gan, W.; Wang, S.; Lei, X.; Lee, M.S.; Kuo, C.C.J. Online CNN-based multiple object tracking with enhanced model updates and identity association. Signal Process. Image Commun. 2018, 66, 95–102. [Google Scholar] [CrossRef]
- Babaee, M.; Li, Z.; Rigoll, G.A. Dual cnn–rnn for multiple people tracking. Neurocomputing 2019, 368, 69–83. [Google Scholar] [CrossRef]
- Bai, Y.; Xu, T.; Huang, B.; Yang, R. Deep deblurring correlation filter for object tracking. IEEE Access 2020, 8, 68623–68637. [Google Scholar] [CrossRef]
- Jain, M.; Subramanyam, A.V.; Denman, S.; Sridharan, S.; Fookes, C. LSTM guided ensemble correlation filter tracking with appearance model pool. Comput. Vis. Image Underst. 2020, 195, 102935. [Google Scholar] [CrossRef]
- Zhao, L.; Li, S. Object detection algorithm based on improved YOLOv3. Electronics 2020, 9, 537. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Jia, K.; Liu, P. Impolite pedestrian detection by using enhanced yolov3-tiny. J. Artif. Intell. 2020, 2, 113. [Google Scholar] [CrossRef]
- Golcarenarenji, G.; Martinez-Alpiste, I.; Wang, Q.; Alcaraz-Calero, J.M. Efficient real-time human detection using unmanned aerial vehicles optical imagery. Int. J. Remote Sens. 2021, 42, 2440–2462. [Google Scholar] [CrossRef]
- Lawal, M.O. Tomato detection based on modified YOLOv3 framework. Sci. Rep. 2021, 11, 1447. [Google Scholar] [CrossRef]
- Wen, B.J.; Lin, Y.S.; Tu, H.M.; Hsieh, C.C. Health-diagnosis of electromechanical system with a principal-component bayesian neural network algorithm. J. Intell. Fuzzy Syst. 2021, 40, 7671–7680. [Google Scholar] [CrossRef]
- Wen, B.J.; Kao, C.H.; Yeh, C.C. Intelligent wearable device of auxiliary force using fuzzy-Bayesian backpropagation control. J. Intell. Fuzzy Syst. 2021, 40, 7981–7991. [Google Scholar] [CrossRef]
- Chang, L.; Chen, Y.T.; Wang, J.H.; Chang, Y.L. Modified Yolov3 for Ship Detection with Visible and Infrared Images. Electronics 2022, 11, 739. [Google Scholar] [CrossRef]
- Roy, A.M.; Bhaduri, J. Real-time growth stage detection model for high degree of occultation using DenseNet-fused YOLOv4. Comput. Electron. Agric. 2022, 193, 106694. [Google Scholar] [CrossRef]
- Roy, A.M.; Bose, R.; Bhaduri, J. A fast accurate fine-grain object detection model based on YOLOv4 deep neural network. Neural Comput. Appl. 2022, 34, 3895–3921. [Google Scholar] [CrossRef]
- Sozzi, M.; Cantalamessa, S.; Cogato, A.; Kayad, A.; Marinello, F. Automatic Bunch Detection in White Grape Varieties Using YOLOv3, YOLOv4, and YOLOv5 Deep Learning Algorithms. Agronomy 2022, 12, 319. [Google Scholar] [CrossRef]
- Herr, L. Television Goes Digital; Springer: New York, NY, USA, 2009. [Google Scholar]
- Briggs, L.J. Effect of spin and speed on the lateral deflection (curve) of a baseball; and the Magnus effect for smooth spheres. Am. J. Phys. 1959, 27, 589–596. [Google Scholar] [CrossRef]
- Sawicki, G.S.; Hubbard, M.; Stronge, W.J. How to hit home runs: Optimum baseball bat swing parameters for maximum range trajectories. Am. J. Phys. 2003, 71, 1152–1162. [Google Scholar] [CrossRef]
- Sharif, M.; Amin, J.; Siddiqa, A.; Khan, H.U.; Malik, M.S.A.; Anjum, M.A.; Kadry, S. Recognition of different types of leukocytes using YOLOv2 and optimized bag-of-features. IEEE Access 2020, 8, 167448–167459. [Google Scholar] [CrossRef]
- Xu, J.; Ma, Y.; He, S.; Zhu, J. 3D-GIoU: 3D generalized intersection over union for object detection in point cloud. Sensors 2019, 19, 4093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, Q.; Lin, R.; Yue, H.; Huang, H.; Yang, Y.; Yao, Z. Research on small target detection in driving scenarios based on improved yolo network. IEEE Access 2020, 8, 27574–27583. [Google Scholar] [CrossRef]
- IEEE Standard 1241-2000; IEEE Standard for Terminology and Test Methods for Analog-to-Digital Converters. IEEE: Piscataway, NJ, USA, 2000; pp. 25–29.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | YOLOv3-Tiny-416 | YOLOv3-Tiny-6081 | YOLOv3-Tiny-6082 | YOLOv3-416 | YOLOv3-608 | YOLOv4-608 |
|---|---|---|---|---|---|---|
| IoU (%) | 53.7 | 64.5 | 68.7 | 73.4 | 73.9 | 78.2 |
| Precision (%) | 61.9 | 86.5 | 89.1 | 97.6 | 97.2 | 99.8 |
| Recall (%) | 53.8 | 85.1 | 89.2 | 95.4 | 97.8 | 99.1 |
| F1 (%) | 57.6 | 85.8 | 89.1 | 96.5 | 97.5 | 99.5 |
| mAP (%) | 62.7 | 87.1 | 90.4 | 98.9 | 97.8 | 99.1 |
| Frame rate based on GPU (FPS) | 48.5 | 47.1 | 47.0 | 19.0 | 18.9 | 17.1 |
| 0.145 kg | 0.037 m | 0.3 |
| Pitch Type | Speed (km/h) | Spin Rate (rpm) | Pitch Angle θ (deg) | Measured Speed (km/h) | Measurement Error of Speed (%) | Measured Spin Rate (rpm) | Measurement Error of Spin Rate (%) | Spin Rate/Speed | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Four-seam fastball | 152 | 2453 | −0.94 | 0.58 | 1.25 | −0.67 | 153 | 0.57 | 2442 | 0.45 | 15.97 |
| 149 | 2319 | −0.44 | 0.47 | 1.13 | −0.65 | 153 | 2.60 | 2094 | 9.70 | 13.70 | |
| 149 | 2320 | 0.21 | 0.26 | 0.95 | −0.69 | 153 | 2.60 | 2523 | 8.75 | 16.50 | |
| 154 | 2314 | −2.03 | 0.95 | 1.62 | −0.68 | 153 | 0.73 | 2267 | 2.03 | 14.83 | |
| 145 | 2418 | −2.38 | 1.14 | 1.82 | −0.68 | 142 | 2.10 | 2387 | 1.28 | 16.81 | |
| 145 | 2386 | −2.14 | 1.07 | 1.74 | −0.68 | 142 | 2.10 | 2153 | 9.77 | 15.17 | |
| 148 | 2329 | −1.36 | 0.78 | 1.44 | −0.66 | 153 | 3.29 | 2342 | 0.56 | 15.32 | |
| 150 | 2306 | −1.71 | 0.88 | 1.53 | −0.65 | 153 | 1.91 | 2432 | 5.46 | 15.91 | |
| 148 | 2323 | −1.37 | 0.79 | 1.45 | −0.66 | 153 | 3.29 | 2042 | 12.10 | 13.36 | |
| 146 | 2272 | −0.61 | 0.57 | 1.23 | −0.66 | 142 | 2.77 | 2335 | 2.77 | 16.45 | |
| 152 | 2282 | −1.57 | 0.82 | 1.49 | −0.67 | 153 | 0.57 | 2726 | 19.46 | 17.83 | |
| 154 | 2306 | −1.91 | 0.91 | 1.55 | −0.64 | 153 | 0.73 | 2276 | 1.30 | 14.89 | |
| 154 | 2311 | −2.25 | 1.02 | 1.67 | −0.65 | 153 | 0.73 | 2051 | 11.25 | 13.42 | |
| 150 | 2082 | −2.39 | 1.14 | 1.79 | −0.65 | 153 | 1.91 | 2358 | 13.26 | 15.42 | |
| 150 | 2261 | −2.51 | 1.15 | 1.83 | −0.67 | 153 | 1.91 | 2432 | 7.56 | 15.91 | |
| 152 | 2131 | −2.53 | 1.16 | 1.81 | −0.64 | 153 | 0.57 | 2321 | 8.92 | 15.18 | |
| 153 | 2180 | −2.17 | 1.02 | 1.67 | −0.65 | 153 | 0.08 | 2328 | 6.79 | 15.23 | |
| 151 | 2418 | −0.91 | 0.59 | 1.29 | −0.70 | 153 | 1.24 | 2595 | 7.32 | 16.98 | |
| 149 | 2416 | −1.31 | 0.74 | 1.45 | −0.70 | 153 | 2.60 | 2589 | 7.16 | 16.94 | |
| 150 | 2477 | −1.04 | 0.63 | 1.35 | −0.72 | 153 | 1.91 | 2592 | 4.64 | 16.96 | |
| Forkball | 138 | 1498 | −0.31 | 0.72 | 1.29 | −0.57 | 132 | 3.99 | 1642 | 9.61 | 12.39 |
| 144 | 1515 | −0.35 | 0.64 | 1.22 | −0.58 | 142 | 1.42 | 1672 | 10.36 | 11.78 | |
| 134 | 1380 | −0.60 | 0.90 | 1.46 | −0.56 | 132 | 1.13 | 1519 | 10.07 | 11.47 | |
| 137 | 1193 | −1.93 | 1.32 | 1.83 | −0.50 | 132 | 3.29 | 1121 | 6.04 | 8.46 | |
| 140 | 976 | −1.50 | 1.19 | 1.65 | −0.45 | 138 | 1.60 | 1029 | 5.43 | 7.47 | |
| Change-up ball | 134 | 1539 | −1.11 | 1.04 | 1.70 | −0.66 | 132 | 1.13 | 1677 | 8.97 | 12.66 |
| 138 | 1930 | −1.20 | 0.93 | 1.58 | −0.65 | 132 | 3.99 | 1726 | 10.57 | 13.03 | |
| 133 | 2009 | −2.49 | 1.42 | 2.10 | −0.69 | 132 | 0.38 | 1751 | 12.84 | 13.22 | |
| 134 | 1552 | −0.90 | 0.97 | 1.55 | −0.59 | 132 | 1.13 | 1659 | 6.89 | 12.52 | |
| 138 | 1800 | −1.95 | 1.20 | 1.83 | −0.63 | 132 | 3.99 | 1729 | 3.94 | 13.05 | |
| Average error | 1.88 | Average error | 7.51 | ||||||||
| Standard deviation of error | 1.16 | Standard deviation of error | 4.33 |
| Number of Pitches | 4 | 7 | 9 | 27 | 31 | 32 | 35 | 36 | 48 | 49 | 58 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Speed (km/h) | 144 | 147 | 146 | 147 | 145 | 146 | 143 | 143 | 137 | 147 | 143 |
| Spin rate (rpm) | 2398 | 2241 | 2357 | 2219 | 2313 | 2386 | 2415 | 2486 | 2495 | 2441 | 2284 |
| Spin/speed | 16.65 | 15.24 | 16.14 | 15.10 | 15.95 | 16.34 | 16.89 | 17.38 | 18.21 | 16.61 | 15.97 |
| Number of Pitches | 1 | 10 | 13 | 16 | 26 | 36 | 50 | 55 | 62 | 63 | 64 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Speed (km/h) | 155 | 158 | 157 | 154 | 157 | 158 | 154 | 157 | 158 | 153 | 154 |
| Spin rate (rpm) | 2157 | 2377 | 2373 | 2395 | 2378 | 2357 | 2189 | 2216 | 2350 | 2220 | 2228 |
| Spin/speed | 13.93 | 15.01 | 15.15 | 15.59 | 15.12 | 14.96 | 14.22 | 14.10 | 14.87 | 14.47 | 14.43 |
| Number of Pitches | 1 | 7 | 19 | 24 | 32 | 41 | 53 | 59 | 66 | 77 | 81 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Speed (km/h) | 144 | 144 | 145 | 145 | 144 | 146 | 146 | 143 | 145 | 143 | 143 |
| Spin rate (rpm) | 2377 | 2395 | 2398 | 2370 | 2310 | 2344 | 2351 | 2352 | 2426 | 2432 | 2467 |
| Spin/speed | 16.56 | 16.58 | 16.54 | 16.35 | 16.01 | 16.06 | 16.15 | 16.50 | 16.77 | 16.96 | 17.23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, B.-J.; Chang, C.-R.; Lan, C.-W.; Zheng, Y.-C. Magnus-Forces Analysis of Pitched-Baseball Trajectories Using YOLOv3-Tiny Deep Learning Algorithm. Appl. Sci. 2022, 12, 5540. https://doi.org/10.3390/app12115540
Wen B-J, Chang C-R, Lan C-W, Zheng Y-C. Magnus-Forces Analysis of Pitched-Baseball Trajectories Using YOLOv3-Tiny Deep Learning Algorithm. Applied Sciences. 2022; 12(11):5540. https://doi.org/10.3390/app12115540
Chicago/Turabian StyleWen, Bor-Jiunn, Che-Rui Chang, Chun-Wei Lan, and Yi-Chen Zheng. 2022. "Magnus-Forces Analysis of Pitched-Baseball Trajectories Using YOLOv3-Tiny Deep Learning Algorithm" Applied Sciences 12, no. 11: 5540. https://doi.org/10.3390/app12115540
APA StyleWen, B. -J., Chang, C. -R., Lan, C. -W., & Zheng, Y. -C. (2022). Magnus-Forces Analysis of Pitched-Baseball Trajectories Using YOLOv3-Tiny Deep Learning Algorithm. Applied Sciences, 12(11), 5540. https://doi.org/10.3390/app12115540