1. Introduction
The number of microsatellites to be orbited is increasing rapidly, in particular for the delivery and replacement of microsatellites as part of mega constellation programs. This is stimulating a new wave of dedicated launch vehicles capable of offering responsive, flexible and cost-effective services to this huge and new market. Some of these “micro-launchers” are listed in
Table 1. The mass of payload
to be inserted into LEO is below 1000 kg. In fact,
is the driving element of a space rocket and it is important to define it at the first step of a launcher design. A very popular method of computation of
is offered by the Tziolkowski formula. However, the results obtained using this method are not accurate since the space environment (gravity and aerdoynamic forces) and the guidance (direction of thrust) are not taken into account. On the other hand, the accurate computation of a launcher trajectory and the evaluation of launcher performances is a typical and complex problem in the optimization of aerospace trajectories. Launcher performances are evaluated maximizing the final mass that can be set into orbits with different parameters (semimajor axis, eccentricity, inclination). The problem has initial- and final-state variable constraints, path constraints and discontinuities in the mass variation, due to stage separation. This optimization problem can be approached in different ways: all the approaches require educated guesses to initialize some iterative algorithm able to refine the initial guesses and to achieve the optimal solution.
In the scientific literature, some papers [
1,
2,
3,
4,
5,
6,
7] address the problem of optimizing the ascent trajectory of launch vehicles through indirect approaches. Examples are the multiple-subarc gradient restoration algorithm, proposed by Miele, and multiple shooting techniques [
5,
6,
7]. The previously cited works [
2,
3,
4,
5,
6,
7] require a considerable deal of effort for deriving the analytical conditions for optimality and for the subsequent programming and debugging. Furthermore, these methods can suffer from a slow rate of convergence and an excessive dependence on the starting guess. Alternative approaches [
8,
9] are direct in nature, often are more robust, but require discretization of the problem (e.g., through collocation [
8,
9]) and the use of dedicated algorithms for nonlinear programming, without avoiding the need of a starting guess. Most recently, the indirect heuristic method [
10] was proposed as an effective approach for trajectory optimization of ascent vehicles, with the remarkable feature of not requiring any starting guess. For the purpose of preliminary analysis of the performance of new ascent vehicles, fast, approximate approaches that are exempt from convergence issues and minimize the computational effort are desirable. With this intent, Pontani and Teofilatto [
11] and Pallone et al. [
12,
13] propose two numerical approaches for performance evaluation of multistage launch vehicles that aim at obtaining accurate predictions of the performance attainable from a launch vehicle.
The aim of this paper is to derive formulas, possibly as simple as the Tziolkowski one, able to obtain in a few seconds the performance of a multistage space rockets and also able to offer trajectory parameters useful as input for the convergence of complex numerical programs with accurate representation of the rocket system and its space environment.
The formulas originate from previous work [
14], which has been generalized to multistage rockets in [
15]; all the rocket state variables are derived in [
16]. In the present paper, the method is extended to include the optimal choice of a cost arc and the guidance of the last stage of the launcher till the injection into the selected orbit, so the performance of a space launcher is obtained. The method is based on simple mathematics and physics principles and only a few seconds are needed to determine the payload mass that can be set into orbits of different altitude and inclinations, starting from any location of the launch pad.
The major simplification made in order to obtain these results is that the aerodynamic drag is neglected, and this produces an error in the computation of the launcher trajectories. It is rather difficult to treat the aerodynamic effect analytically due to its highly non-linear dependence on velocity and altitude. Some analytic formulas including aerodynamics are derived in [
17]; these however are restricted to the vertical arc of the trajectory. To evaluate the impact of drag, the method presented was compared to numerical results obtained by a high-fidelity level of representation of the launcher dynamics. It is shown that the error in the estimate of the optimal payload mass to be inserted into orbit is relevant only for orbits of altitude below 600 km, and in these cases the error does not exceed 10% Moreover, it is proved that the analytic approach proposed here can provide good guesses for numerical solvers of the optimal control problem.
The paper is organized as follows: in
Section 2, a first sizing of a space launcher is given based on the Tziolkowski formula. Assuming a payload mass to be delivered in LEO orbit and assuming a fixed percentage of losses, a method is derived to size the staging of a multistage rocket in an optimal way. In
Section 3, analytical formulas for the launcher gravity-turn phase are developed in detail for the case of multiple stage rockets. These formulas provide the launcher trajectory of the first stages and allow for the evaluation of the so-called gravity loss.
Section 4 and
Section 5 describe the method of computation of the full launcher trajectory till the injection into orbit.
Section 6 is dedicated to testing the method with respect to numerical computations.
2. First Sizing of a Launch Vehicle
Achieving a single stage to orbit is still an infeasible task and space launchers have a number
N of stages ranging from 2 to 4. Each stage has a total mass
where
is the propellant contained within the tank of each stage and the structural mass coefficient of each stage is defined as
The total mass at lift off is
with
the mass of the heat shields (here released at the end of the gravity-turn phase) and
is the satellite mass to be injected into orbit. At the time
of the end of the first stage boost (burn time), the propellant mass
is consumed and the mass of the space rocket is
The velocity reached at burn time
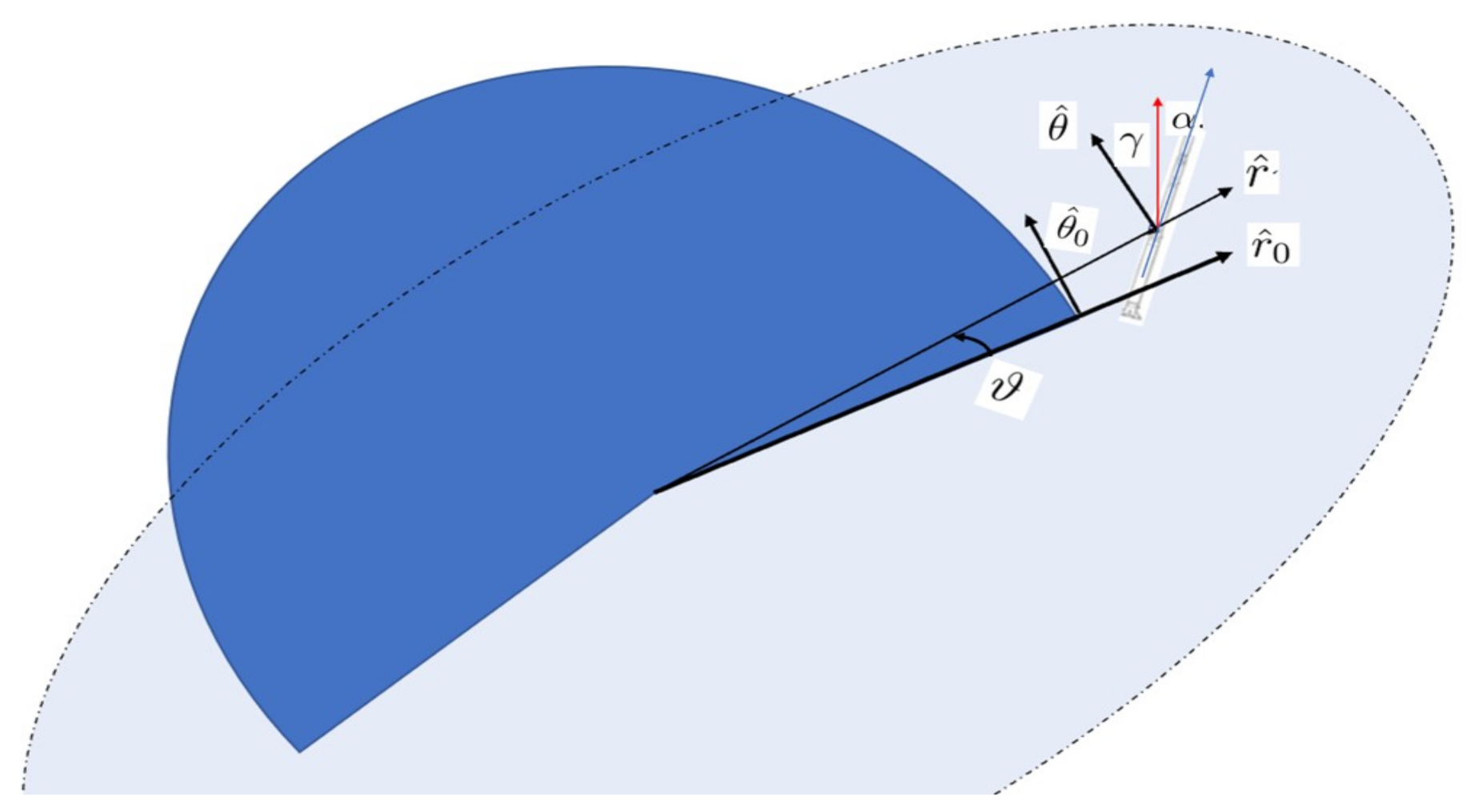
can be computed integrating the acceleration
here
T is the thrust intensity with a direction determined by the angle
taken from the velocity
. The velocity direction is determined by the flight-path angle
taken from the local horizon direction
, see
Figure 1. The variable
r is the radius distance from the centre of the Earth to the launcher centre of mass and
is the Earth gravitational constant. The atmospheric density is denoted by
and
is the launcher drag coefficient computed with respect to the reference surface
S.
To underline the thrust’s contribution to the variation in velocity and consider all the other terms as “losses”, let us write (
2) as
Integrating the above acceleration between time zero and
, one obtains the velocity after the first-stage boost
Equation (
3) is called the “equation of losses”
where the first variation of velocity due to the engine boost is called the Tziolkowski variation of velocity and the other velocities subtracted to
are called gravity, drag and misalignment losses, respectively. Average thrust is defined by
, where
is equal to the mass rate
. Inserting
in (
3), we obtain the Tziolkowski velocity variation provided by the first-stage engine
Introducing the subrocket structural mass ratios
the variation of the velocity provided by the engines of a multistage rocket is
The values of the specific impulses
depend on the kind of propellant, for instance liquid or solid.
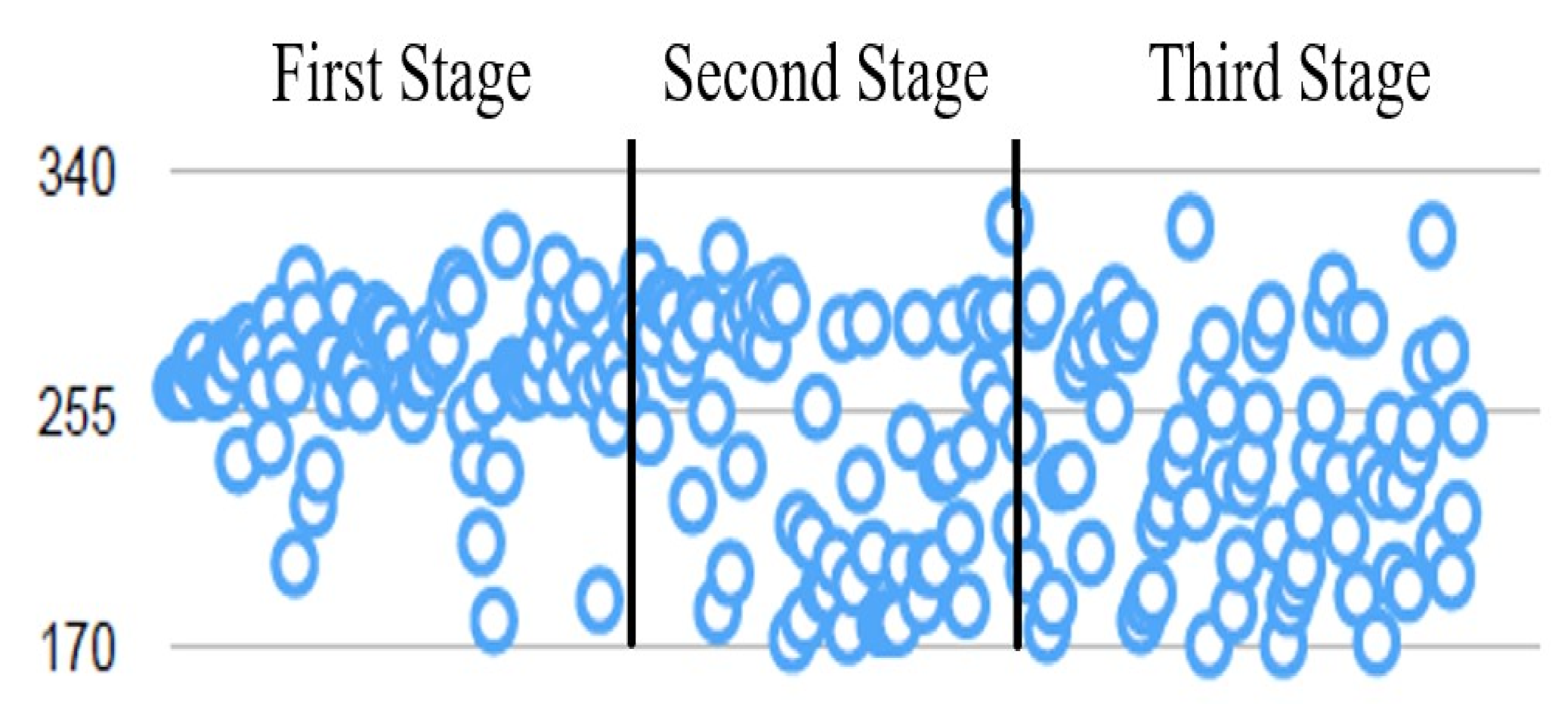
Figure 2 shows the specific impulses for stages with solid propellant: these values are taken from the database [
18] and we have average values
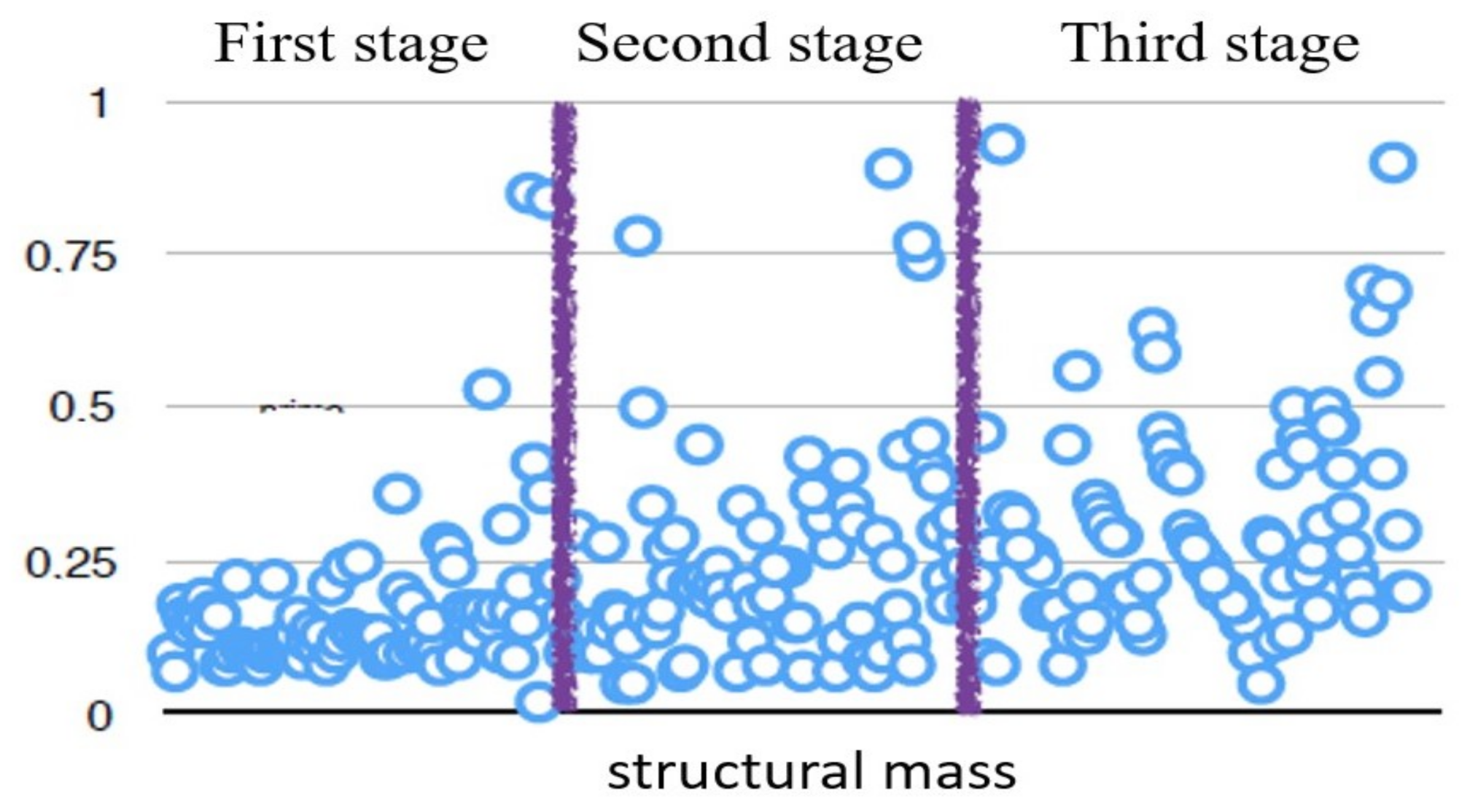
Other parameters defined by technical constraints are the structural mass ratio of each stage (
1):
Figure 3 shows these values for a number of stages taken from the database [
18], and we have average values
It is important to know that if the total mass
, the payload mass
and the values
,
are given, there is an optimal selection of
, maximizing the Tziolkowski velocity (
4). The procedure to identify the optimal subrocket mass ratios
is in
Appendix A.
The parameters , can be easily guessed at the first step of the rocket design, and the maximum payload mass to be inserted into a specific reference orbit is the performance characterizing a space launcher.
With
,
, and
fixed, the total mass
determines the optimal mass distribution
(staging) and the maximum Tziolkowski velocity, according to
Appendix A. If this velocity is equal to the velocity required to inject the payload mass
into the reference orbit,
is the launcher lift-off mass achieving this performance.
One point to underline is that the velocity to be provided by the thrust is not equal to the orbital velocity of a spacecraft on a circular orbit of altitude
h:
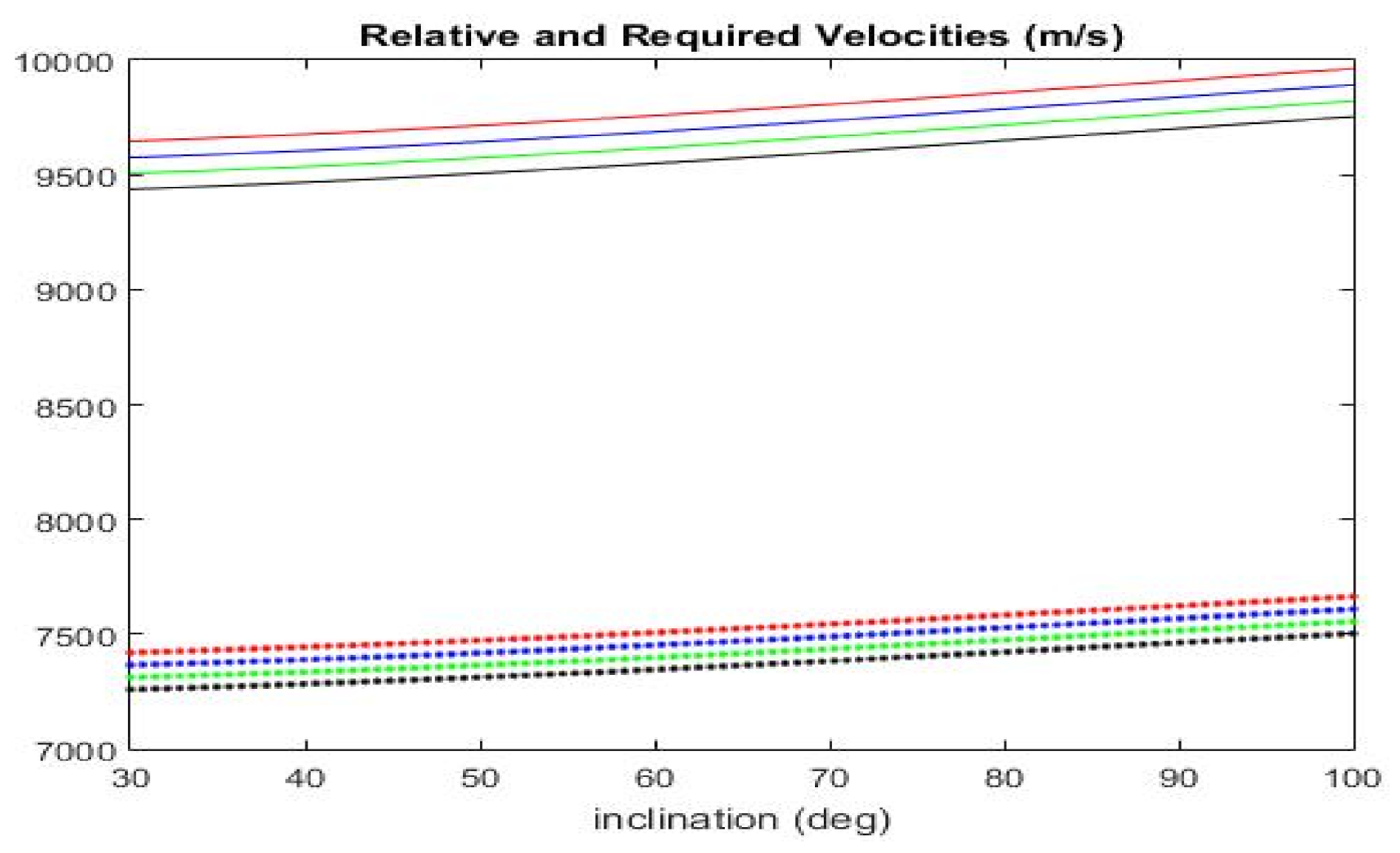
. In fact, we must consider the losses: these depend on each phase of the ascent trajectory. In the present Section it is assumed that the launcher velocity due to thrust must be overcome by 30% the required value for orbit injection. The orbit velocity relative to the Earth
depends on the latitude
L of the launch site and on the azimuth
where
is the velocity of the launch site and the azimuth angle
is related to the launch site latitude and orbit inclination by the equation:
.
Then, the required velocity is here defined as
Figure 4 shows the relative (in blue) and required (in red) velocities to achieve a reference circular orbit of altitude h = 650 km with different inclinations from a launch site at L = 30 deg N.
Table 2 shows the minimum mass at lift off for a micro-launcher having parameters (
5) and (
6) for different payload masses (from 100 to 1000 kg) to be injected into the reference orbit (
). The ratio
is constant.
3. A Second Step (Gravity Losses)
At lift off, the launcher performs a vertical trajectory followed by a pitch manoeuvre to select the required orbit plane. Then, to limit the aerodynamic loads on the structure, any launcher is forced to follow a zero angle of attack trajectory (
) during the atmospheric flight. This trajectory is called the gravity-turn trajectory, and it is performed by the first stages of space launchers. The trajectory is basically planar and the state variables can be the relative velocity, flight-path angle, altitude and range
. The equations of motion are
In fact, these equations are singular under the lift-off condition; .
As observed in [
14], this singularity generates an infinite number of solutions corresponding to the same lift-off condition: one can use this singularity to select among the different solutions the one with a prescribed final value, for instance a fixed flight-path angle
[
15].
An analytic formula for the velocity V, due to Culler and Fried, was obtained under the following hypotheses:
The last of these is the strongest assumption, and is handled considering an average value of the thrust-to-weight ratio. This average value can be computed using the formulas for the variation of mass and the definition of the mass ratio , which verifies .
Then
where
is the initial thrust-to-weight ratio.
Now two transformations are defined:
By the transformation in Equation (
1) we have the following differential equations for the velocity and kick angle
Now the following trigonometrical equations are recalled
showing that the transformation to the
z-variable allows us to transform the trigonometric function in rational functions. Then, Equation (
8) becomes
Dividing the first by the second equation of the system (
9), one has
that is
The velocity in (
10) is a function of the variable
z. The time dependence can be obtained deriving the relation between time and
z. Substitution of (
10) in the second equation of the system (
9) gives
by separation of variables and integrating from
to
tThe launch initial conditions are in the given hypothesis
Imposing these initial conditions in the solution (
10), one has
Then, the initial conditions are verified for any value of the constant
A. That is, there are infinite (gravity-turn) solutions for the velocity, parameterized by A, corresponding to the same initial condition. This violation of the Chauchy theorem on uniqueness of the solution of a differential equation is due to the singularity of
for
in the system (
9).
One can take advantage of this multiplicity of solutions to select for instance the solution that achieves a chosen flight-path angle
at the burn-out time
. The chosen
defines a value
. By Equation (
11), one obtains
and the related velocity is obtained inserting this value of
A into Equation (
10).
In particular, the velocity at burn out is
In addition, the altitude
h and range
s can be easily derived [
16]. For the altitude
By Equation (
10), one has
The elementary integration of the above equation between current
z and initial
gives the formula for the altitude
The integration gives the formula for the range
Equations (
10), (
12), (
14) and (
15), together with (
11), provide the state variables of the gravity-turn trajectory of a single-stage rocket with flight-path angle
at burn-out time
.
For instance, let us consider initial lift off condition
and choose the final condition
this condition corresponds to
. Then Equation (
12) gives
By Equations (
10), (
14) and (
15), the velocity, altitude and range at burn out are equal to
Note that the final velocity formula of a rocket is generally obtained by the Tziolkowski formula that takes into account only the thrust acceleration. In the present setting, the Tziolkowski formula gives the final velocity
The final velocity obtained here, which includes gravity effect, is given by (
16): the difference among the two is the gravity loss and it is equal to
The above results can be generalized to multistage launchers.
4. Analytic Derivation of Launcher Trajectories
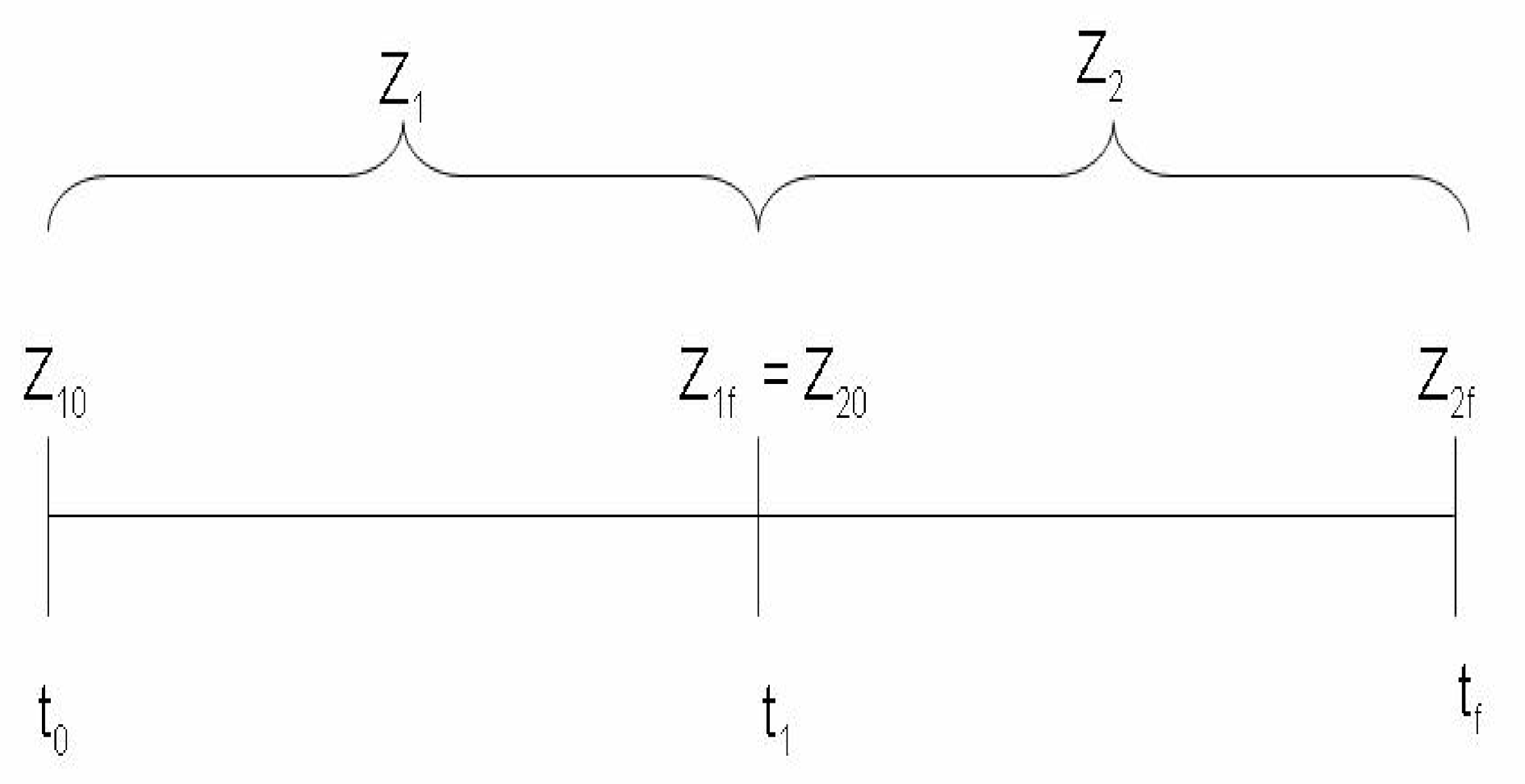
The above analytic formulas can be generalized to multistage launchers. Let us start with two stages with the following average parameters () and ().
The first stage has variables
,
in the time interval
. The second stage has variables
,
in the time interval
and the final value
is fixed (see
Figure 5).
Of course the two solutions
and
must match at the boundary point
The two matching conditions imply
Equation (
11) gives at first-stage burn out
At the burn out of the second stage, one has
and
We have a system of three Equations (
18)–(
20) in the three unknowns
,
and
.
To solve it, let us consider the ratio
Because of (
18), this ratio is a function of
only
The solution
of
(in the range [0,1]) provides the value of the flight-path angle at the end of the first stage. Moreover, by Equation (
20), one finds
and by Equation (
19) one finds
. Hence, the velocity profile of the two-stage launcher with a prescribed flight-path angle
at second-stage burn out is equal to
With same arguments, we obtain the altitude and range
Note that the gravity loss of the two-stage launcher is
Any number of stage N can be handled: of course, more numerical work is needed to find out the unknown variables. The N-1-matching conditions on the flight-path angle generate the following N-1-matching conditions on the velocity
These, together with the
N relationships related to each burn time
generate
equations to be solved with respect to the
unknowns
,
.
By these solutions, the velocity, altitude and range profiles can be computed using Equations (
13)–(
15) in the ranges
.
For instance, for a three-stage launcher, one has
(these five Equations (
24)–(
28) with the five unknowns
,
,
,
,
).
One solution is to write the variables
and
as function of
using Equations (
27) and (
28). Then, the ratios
,
are obtained dividing (
25) and (
26) by the Equation (
24). The two ratios give two equations on the two unknown
,
. The solutions can be found numerically within the interval [0,1], and they determine the values of the flight-path angles at the end of the first and second stages. The values
,
,
are derived by Equations (
24) and (
26) and and the velocities at the end of each stage are obtained.
For a four-stage launcher, there are seven equations in the seven unknowns
,
,
,
,
,
,
The first three equations allow us to write , , as function of only. Then, the three ratios , , are functions of the three unknowns , , . The solution is used then to derive .
Note that the above formulas for three- or four-stage launchers provide the values of the flight-path angles and the velocities at the end of each stage for the launcher trajectory with a fixed value of the final flight-path angle.
5. Guidance
The gravity-turn trajectory constrains the guidance and should be abandoned if possible; the relevant condition is the factor , where is the dynamical pressure and is the angle of attack. This factor must be below a limit which is peculiar to any launcher and can be satisfied by the gravity-turn () trajectory. As the altitude increases, the atmospheric density decreases exponentially, so at a certain point of the flight the condition of disappears and a different guidance can be applied. The guidance applied here is based on: (A) a possible coasting arc, and (B) thrust along the horizontal direction.
Generally, a coasting arc is performed after the burn out of the stage of an N stage launcher to increase the altitude at the cost of a moderate decrease in velocity. After the coasting arc, the launcher is close to the target altitude , whereas the required velocity must be gained. This velocity basically has the horizontal direction , then the thrust direction is along during the N-stage boost.
With the above guidance scheme, the full launcher trajectory depends on two parameters: the flight-path angle at the end of the gravity-turn phase and the duration of the coasting arc. The two parameters are introduced into an iterative routine (such as the Matlab routine fsolve.m) and updated to set the errors on the final altitude and velocity to zero, where is the N-stage burn-out time.
Let us consider a three-stage rocket as an example. The first two stages are in gravity turn with a prescribed final flight-path angle , then a costing arc of duration is performed. Finally the third-stage boost is applied with horizontal thrust direction. The Matlab routine fsolve.m is used to update the values , for instance, to achieve the polar circular orbit of altitude km from a launch site with a latitude of 30 deg N. The required velocity is then equal to m/s.
The launcher has the parameters reported in
Table 3. The Tziolkowski velocity is equal to
. From the data of
Table 3 it is possible to derive the mass parameters of each stage
,
,
and the mass of each substage
, see Equations (
A1) and (
A2) in
Appendix A. From the values
,
,
and
,
,
, it is possible to derive the propellant mass rates
,
,
, hence the burn times
. For any fixed
, the Equations (
21)–(
23) give the state of the launcher at the end of the second stage where the gravity-turn phase ends. After a coasting of duration
, the third stages thrust the rocket up to the burn time
; the final altitude and velocity are compared with the required
. The parameters
,
are updated in order to match the required final orbit conditions. After few iterations, the routine finds the following parameters to reach the required orbit:
,
.
6. Numerical Comparison
The results obtained by the analytic formulas are now compared with a numerical code simulating the launcher trajectory with better accuracy. The equations of motion are the three-dimensional equations of flight in the relative velocity frame with state variables
with
Equations (
36) and (
37) are used with
for the gravity-turn arc, with
for the coasting arc and with
for the third-stage boost. Lift off begins with an initial vertical arc of small duration
; this is computed in the Cartesian frame with non-singular coordinates. After the vertical arc, to turn the trajectory from the vertical direction, a pitch manoeuvre starts with a fixed direction of thrust
and ends when
. At this time (called pitch over), the gravity-turn trajectory starts. The pitch direction of thrust
is chosen so to have the prescribed value
at the second-stage burn out. Then, the coasting arc duration is chosen to achieve the required orbit.
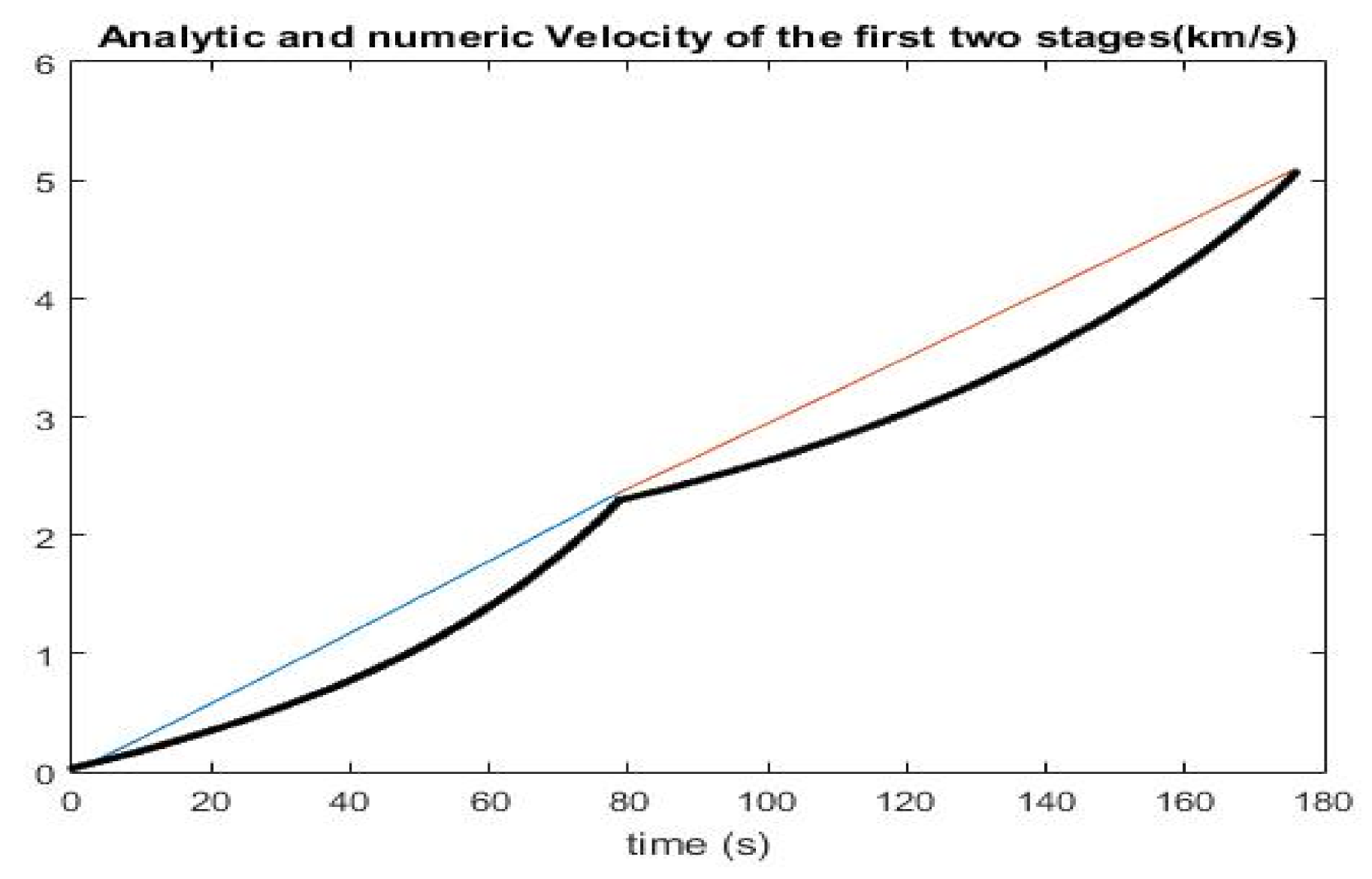
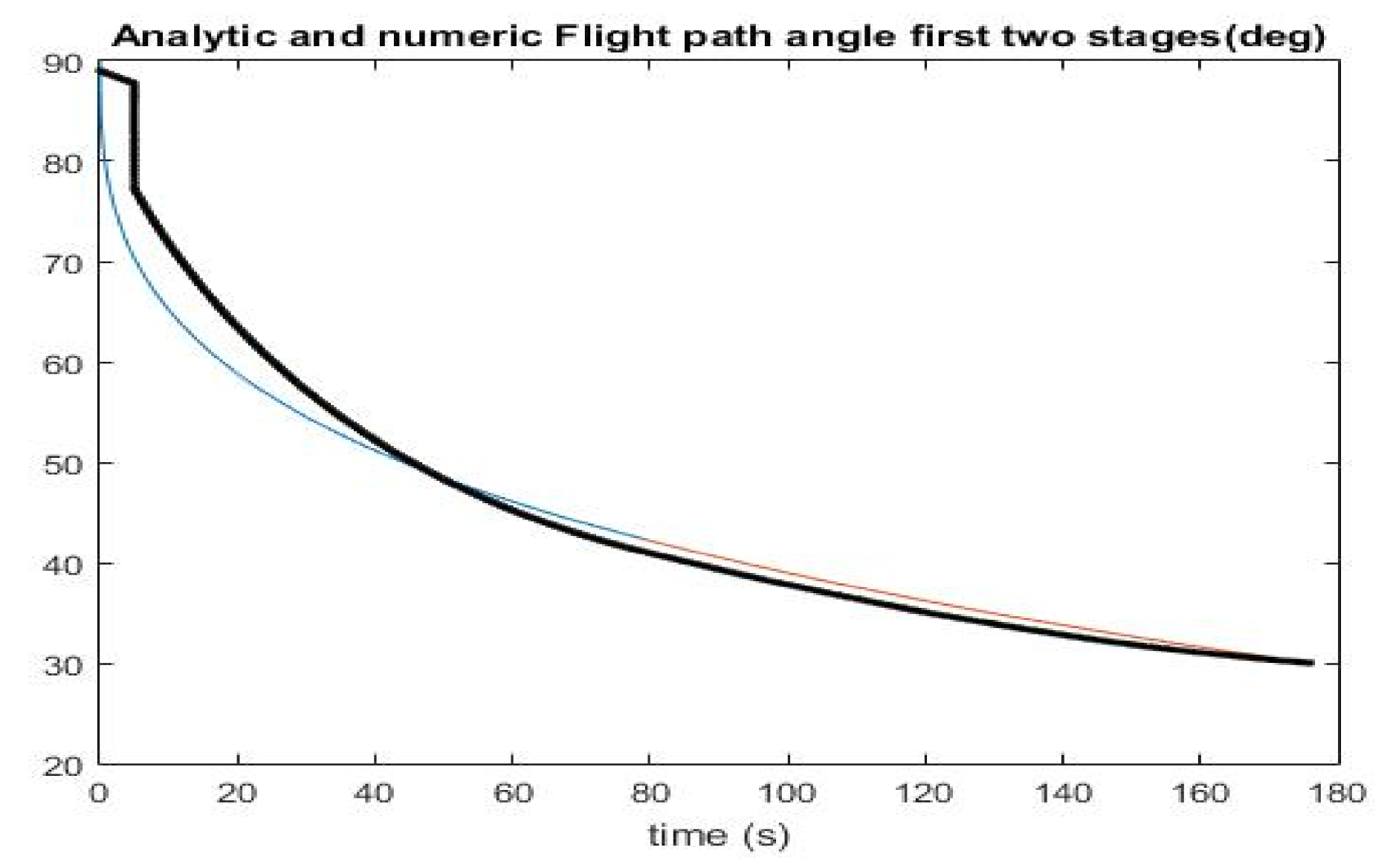
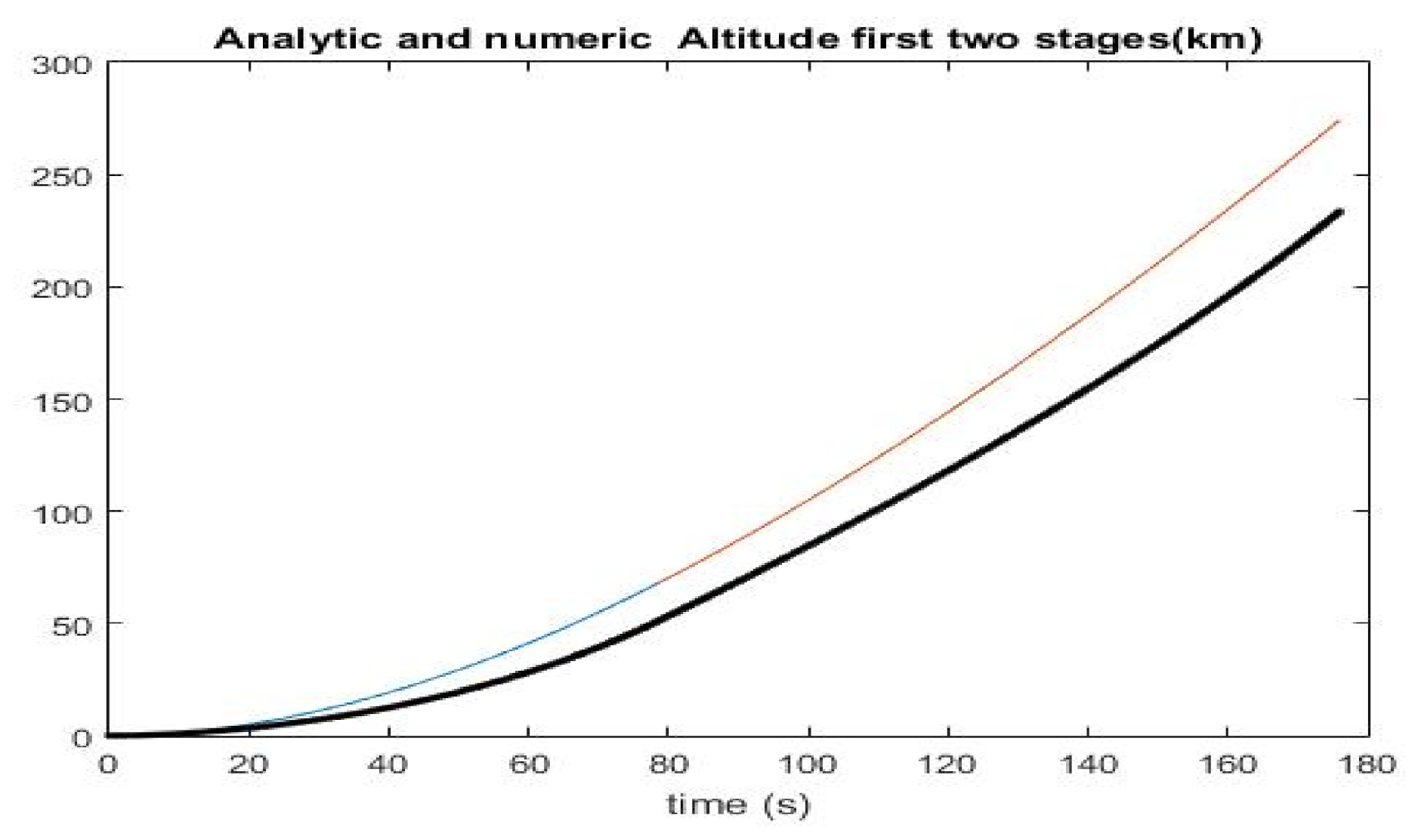
Figure 6,
Figure 7 and
Figure 8 show the analytical and numerical graphs of the velocity, flight-path angle and altitude during gravity turn. Note that at the end of the second stage the discrepancy between analytic and numeric results is rather small for the velocity, whereas a reduction of
occurs in the altitude due to the numerical integration of the drag force. In the numerical calculation the atmospheric density is represented by the USATMO 76 model and the drag coefficient is kept constant at an average value
. The reference surface is
, with a diameter of
m. The drag effect reduces the payload mass that can be inserted into the reference orbit.
In fact, the numerical results give insertion in the polar circular orbit of altitude 650 km of a payload of mass
kg, vertical flight duration
s, and pitch angle
deg (generating
=
deg), and coasting time
s. The payload mass reduction with respect to the analytical results is about
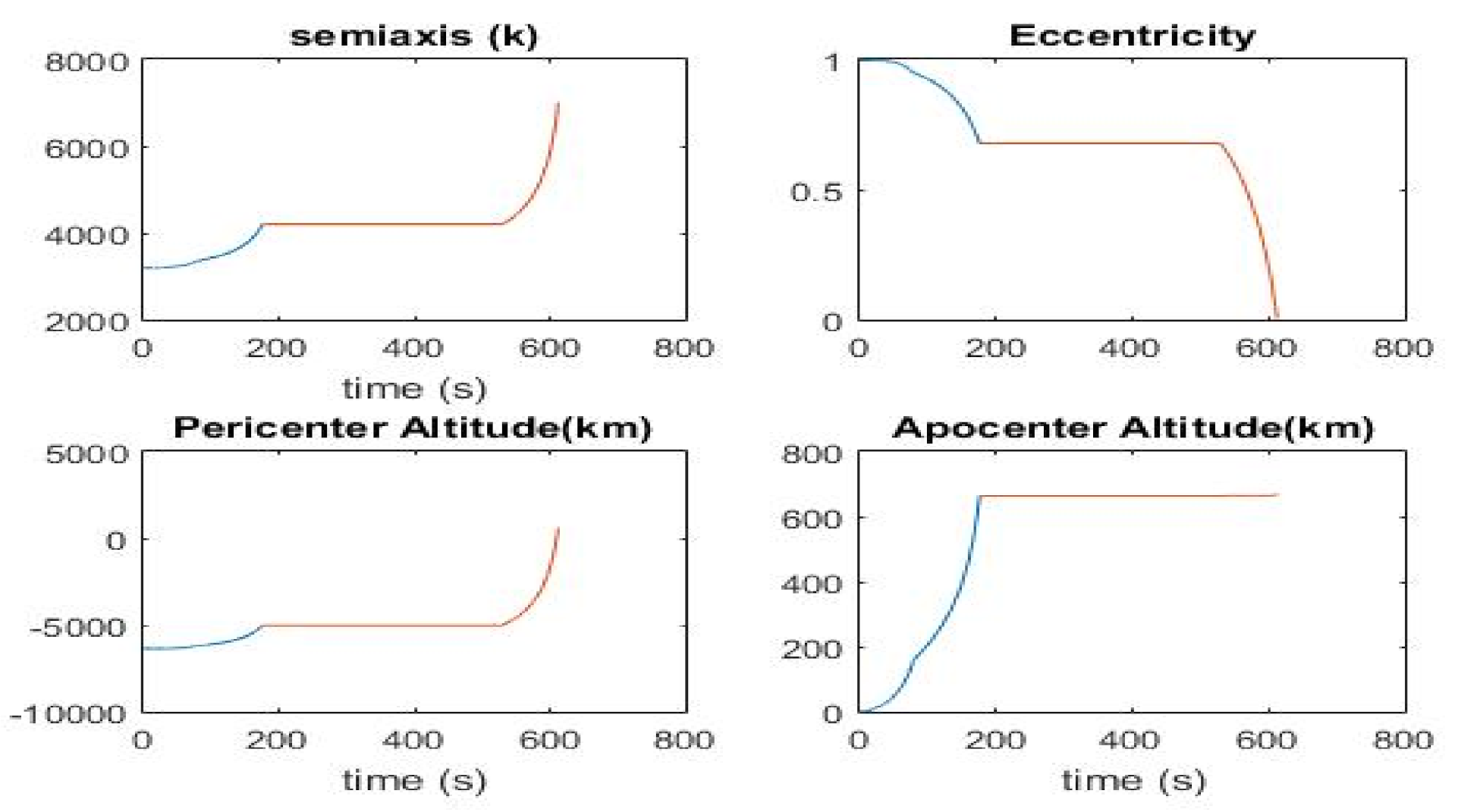
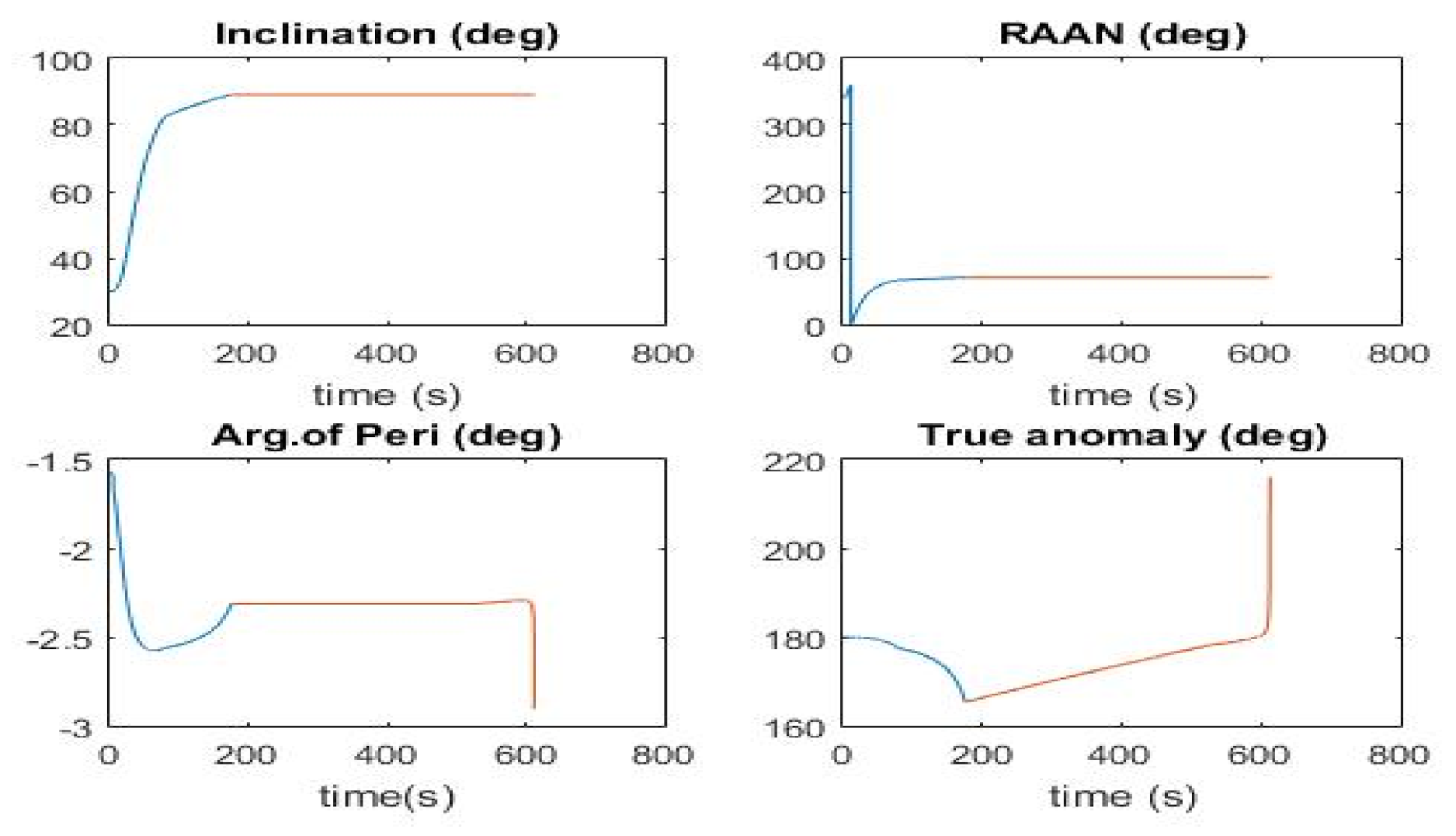
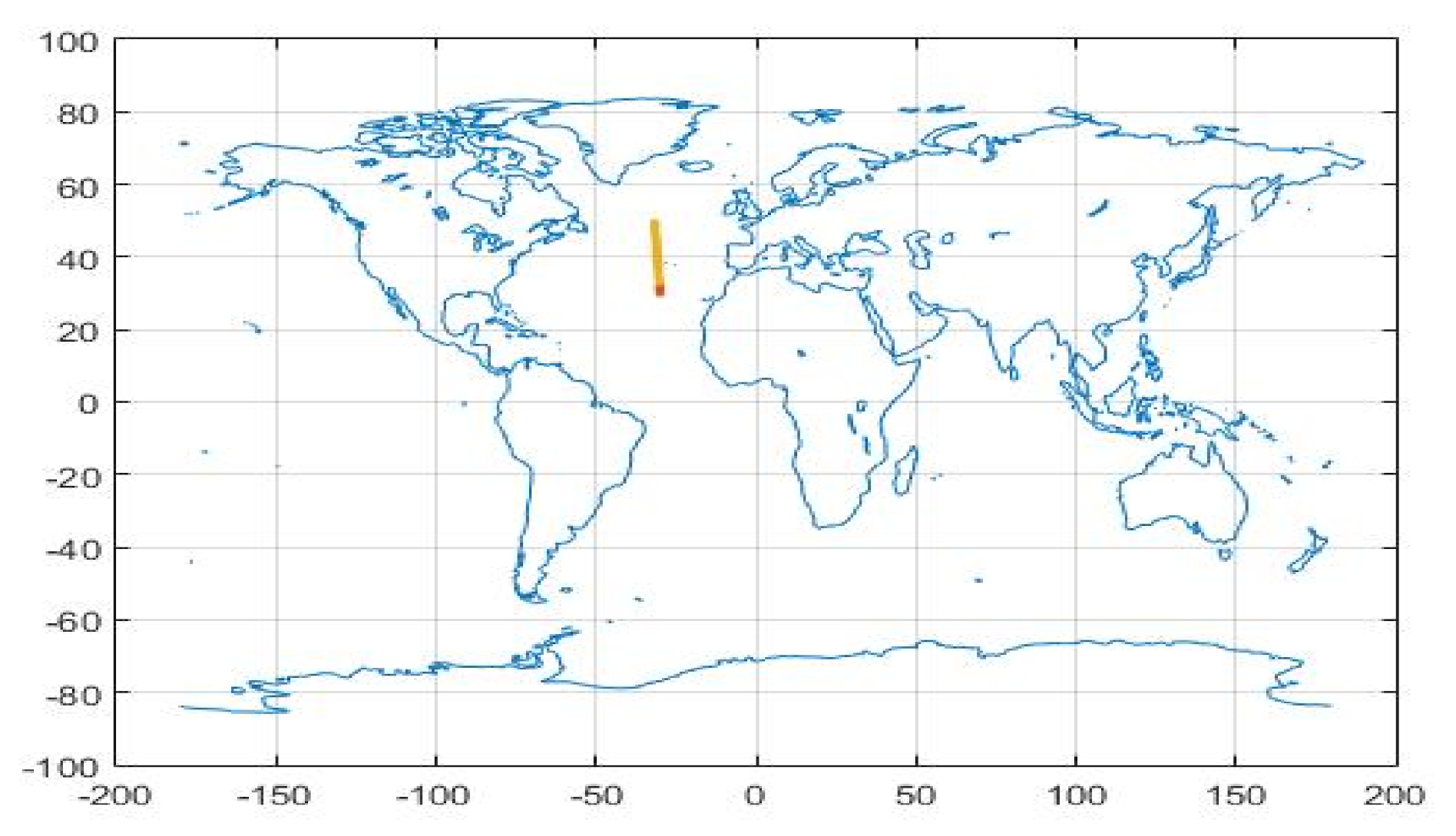
. The evolution of the orbit parameters during the launch is shown in
Figure 9 and
Figure 10, and
Figure 11 shows the launcher ground track.
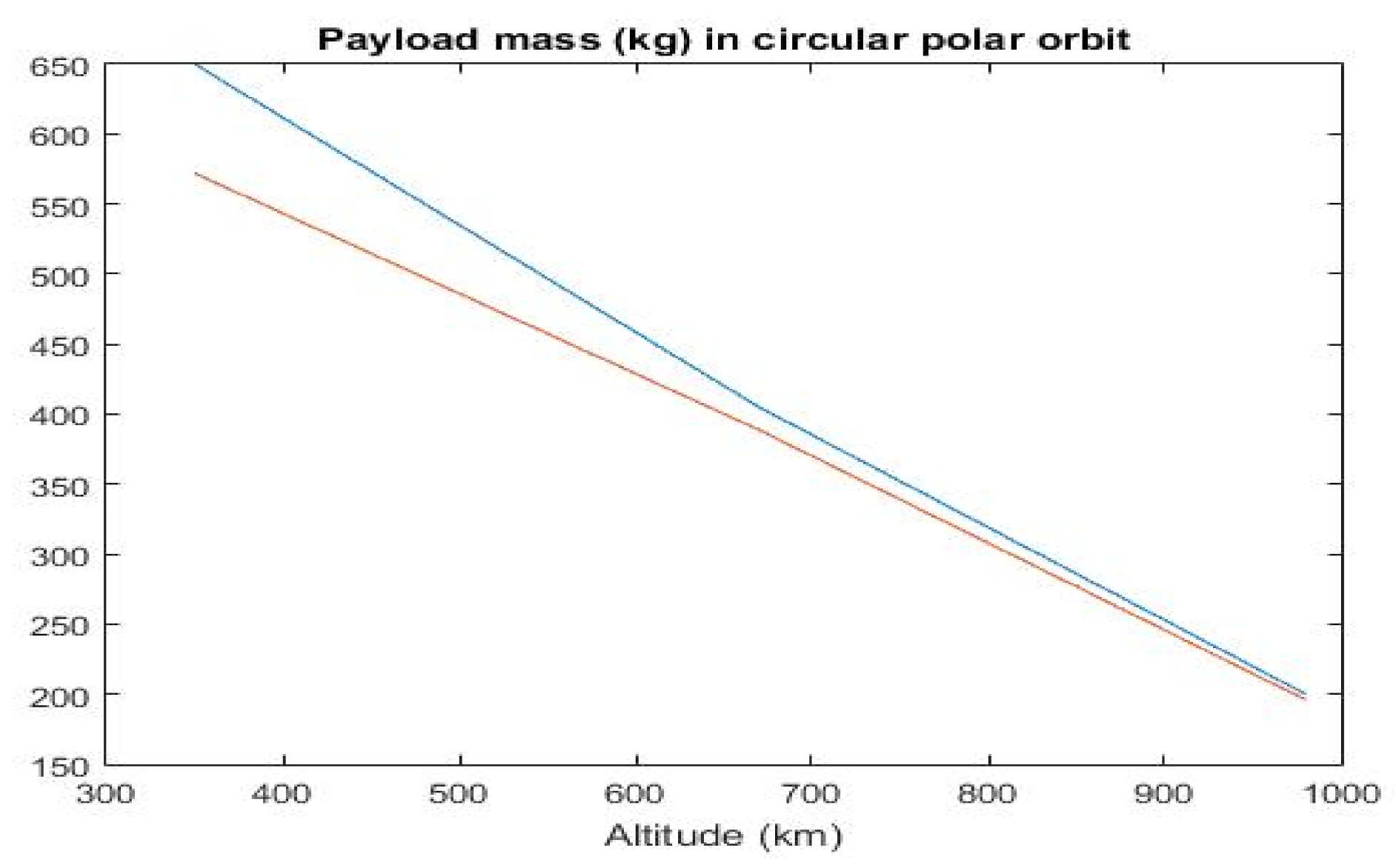
Figure 12 shows the payload mass evaluation for polar circular orbits of different altitudes obtained by the analytic (blue curve) and numerical (orange curve) algorithms. Of course, the bigger differences are for orbits of lower altitude; however, the reduction in the payload mass does not exceed
of the value found analytically.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}