
Closed-Circuit Pump-Controlled Electro-Hydraulic Steering System for Pure Electric Wheel Loader



Abstract
:1. Introduction
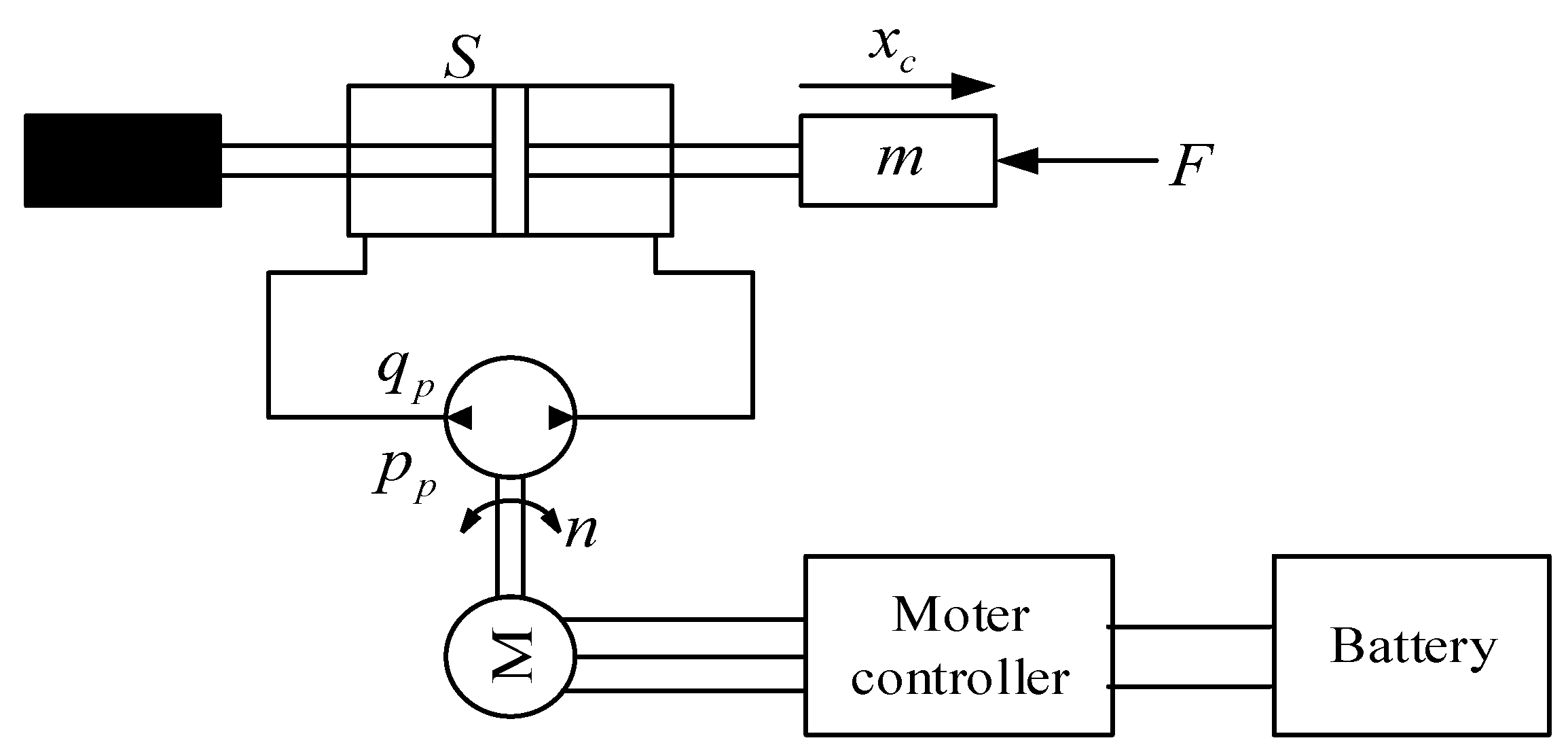
2. Working Principle
- (1)
- The closed-circuit pump-control system is adopted and the throttling loss and overflow loss of the traditional steering system can be avoided.
- (2)
- Permanent magnet synchronous motor is used as the driving motor, which has good speed regulation characteristics and dynamic response characteristics. According to the requirements of working conditions, variable speed flow matching is satisfied, and flow pressure high-frequency response is realized.
- (3)
- The electronic control handle is used as the steering control lever, which has good response characteristics and steering accuracy and requires a small range of movement, greatly reducing the labor intensity of the driver.
3. System Characteristic Analysis
- (1)
- Left and right steering cylinders are simplified as double-acting cylinders.
- (2)
- The system relief valve is always closed.
- (3)
- The oil in the closed system is sufficient.
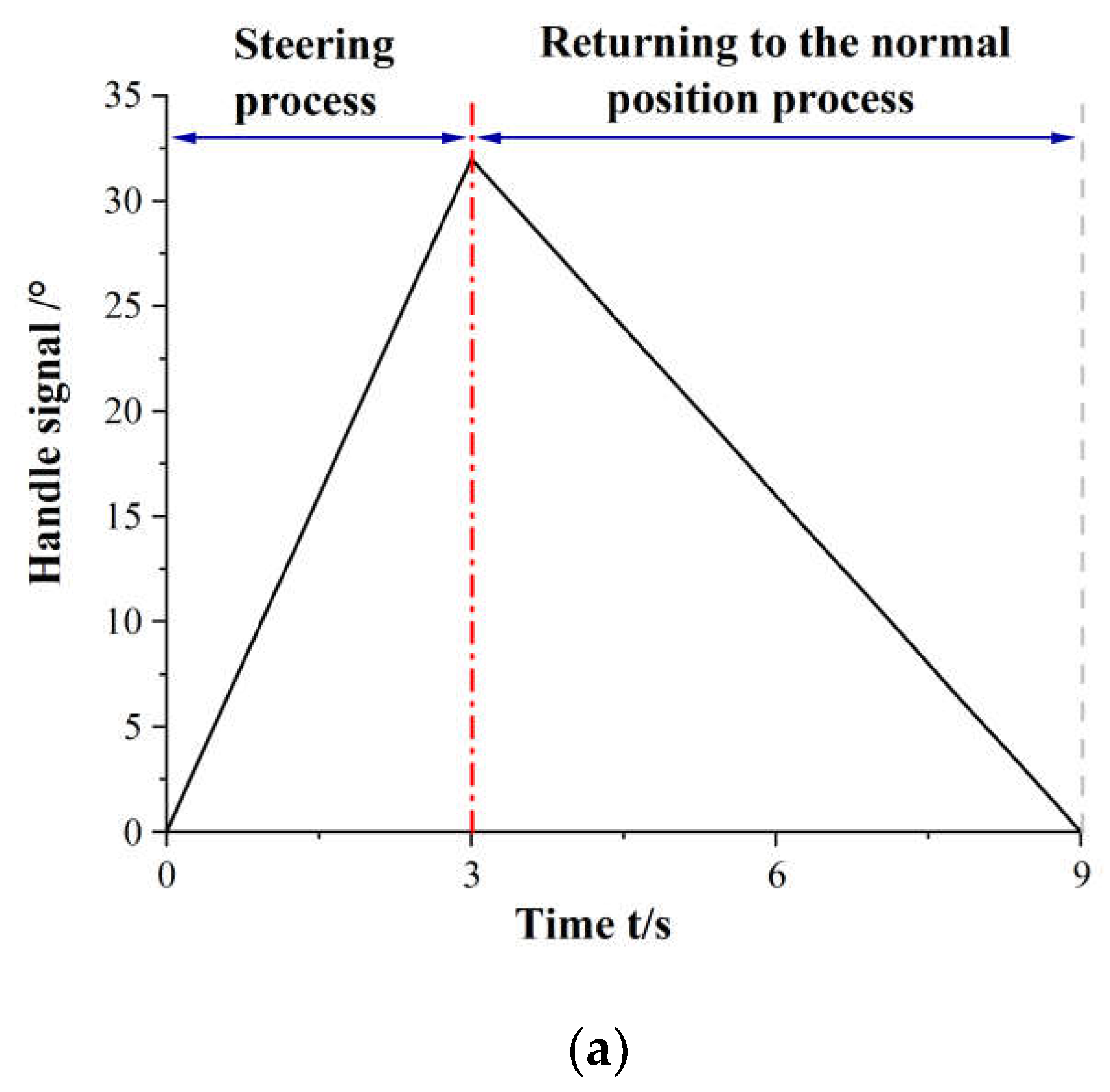
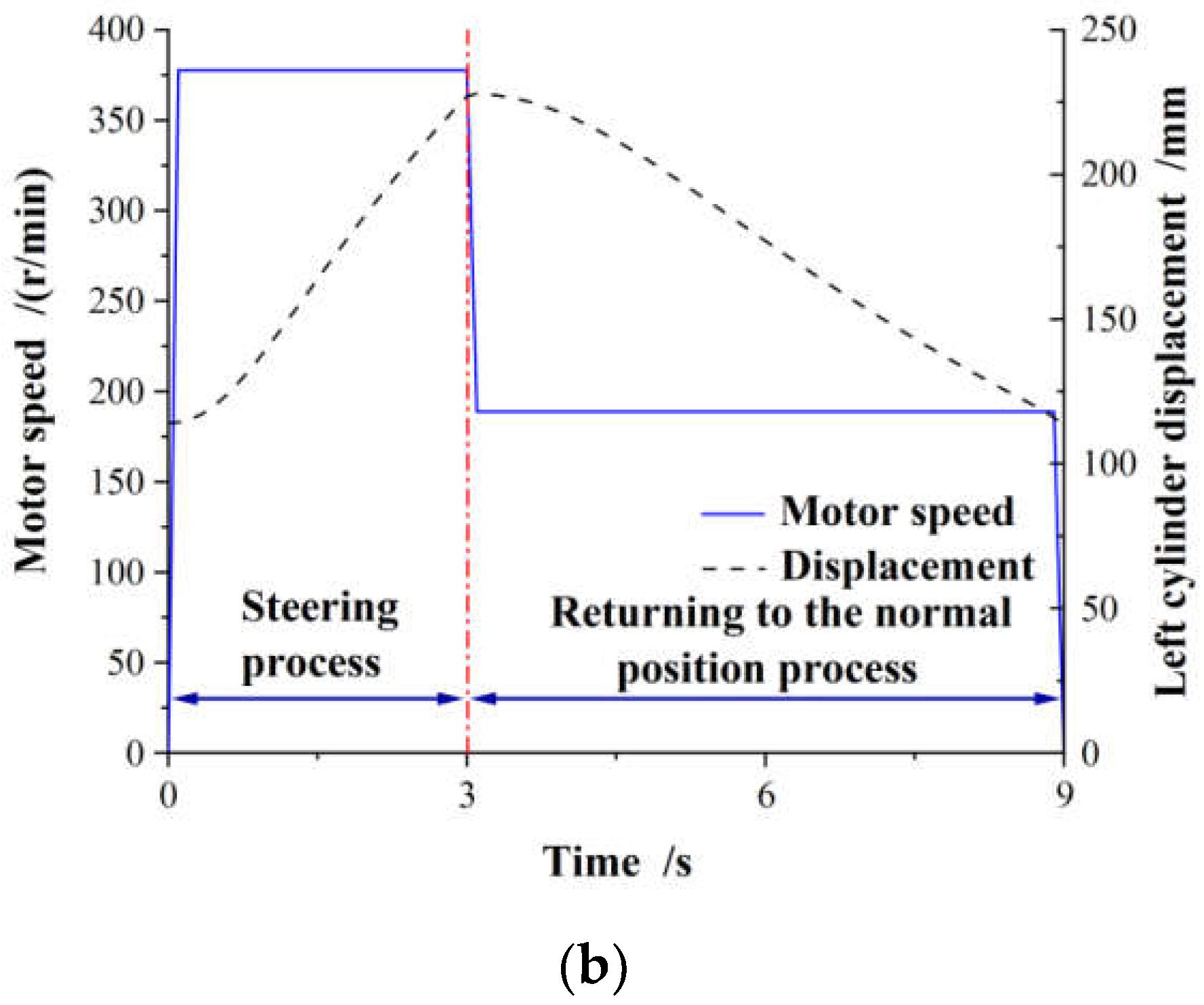
4. Closed-Loop Control Strategy of the Steering Angle
5. Experimental Research
5.1. Calculation of Loader Steering Efficiency
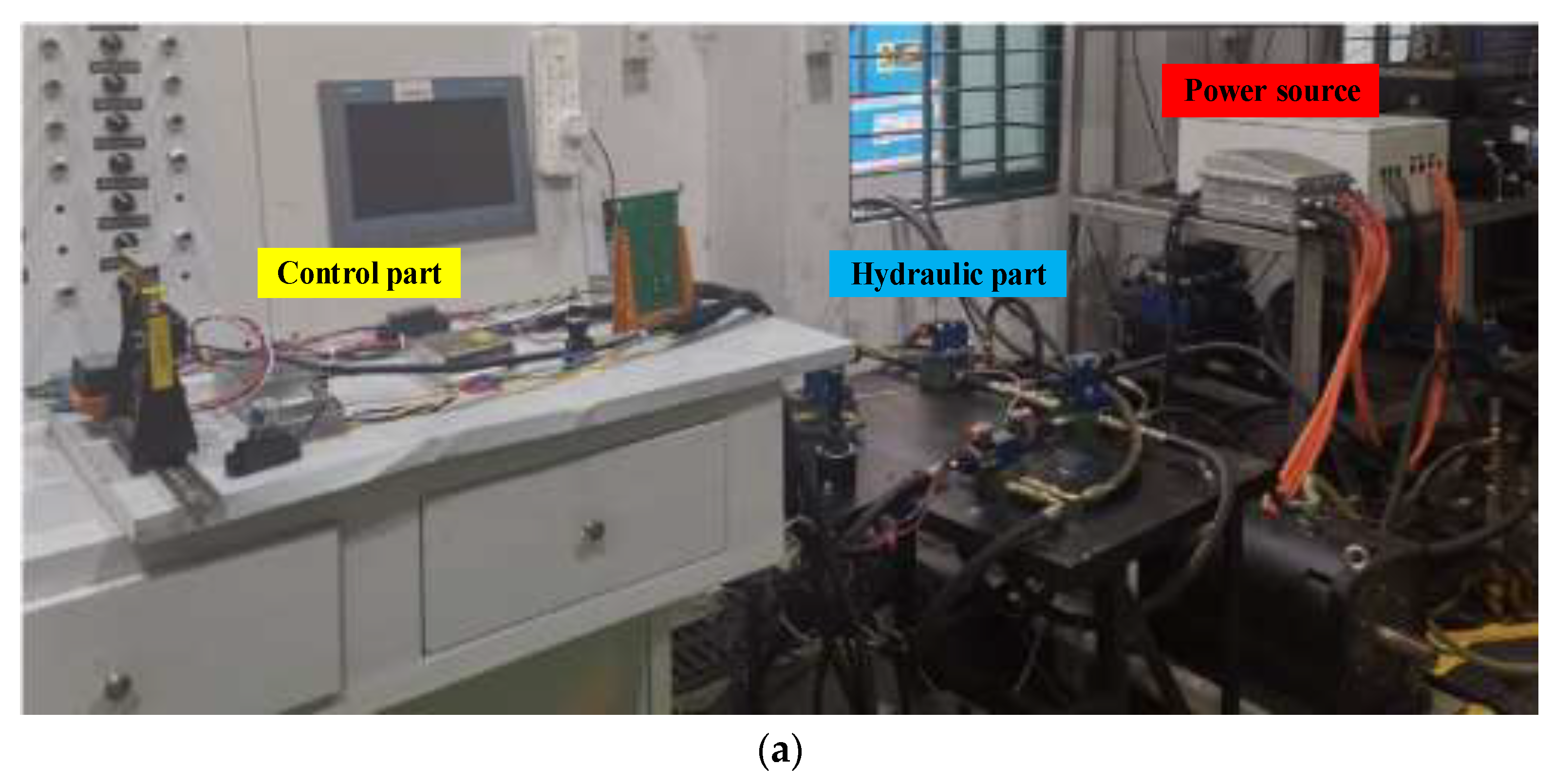
5.2. Experimental Platform
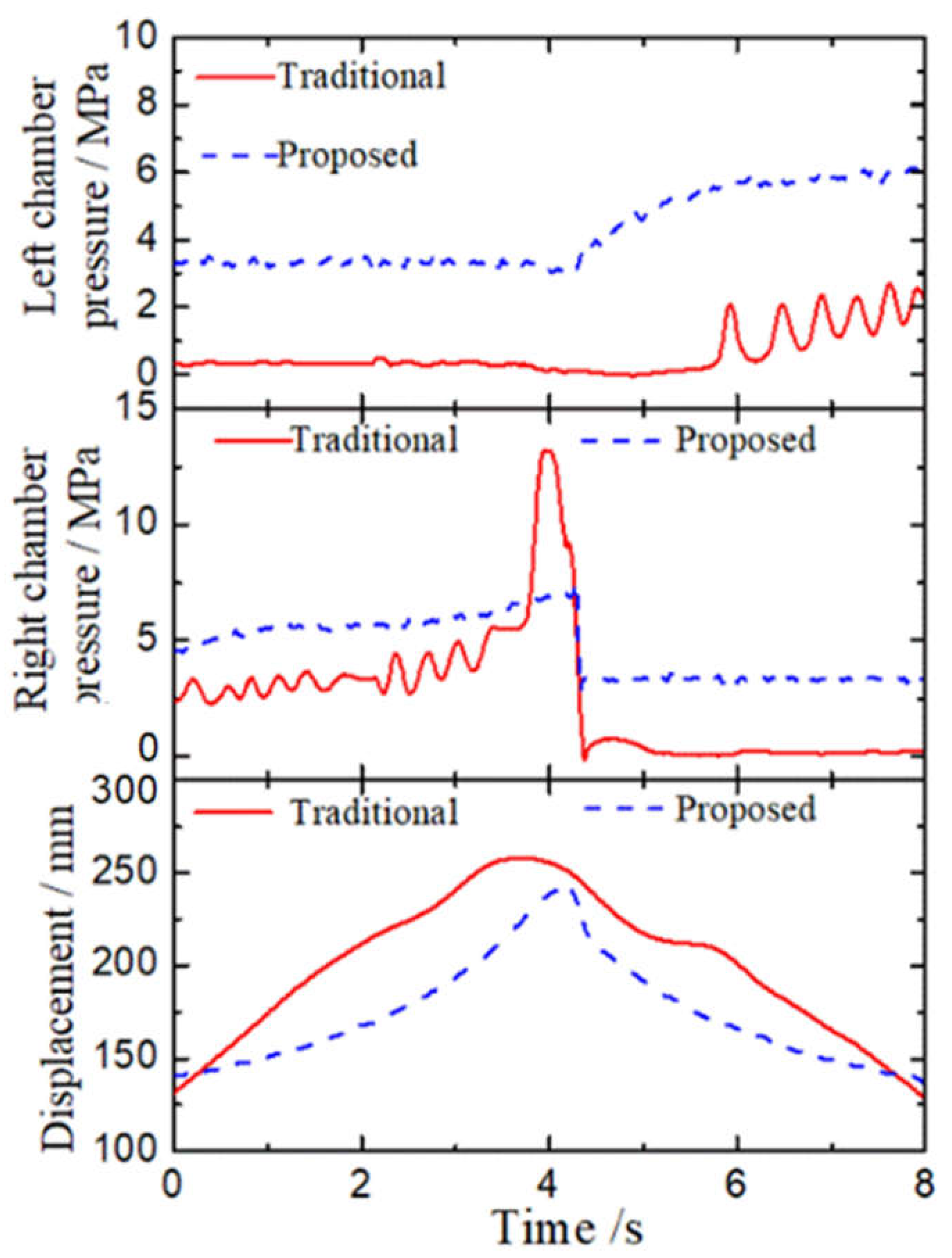
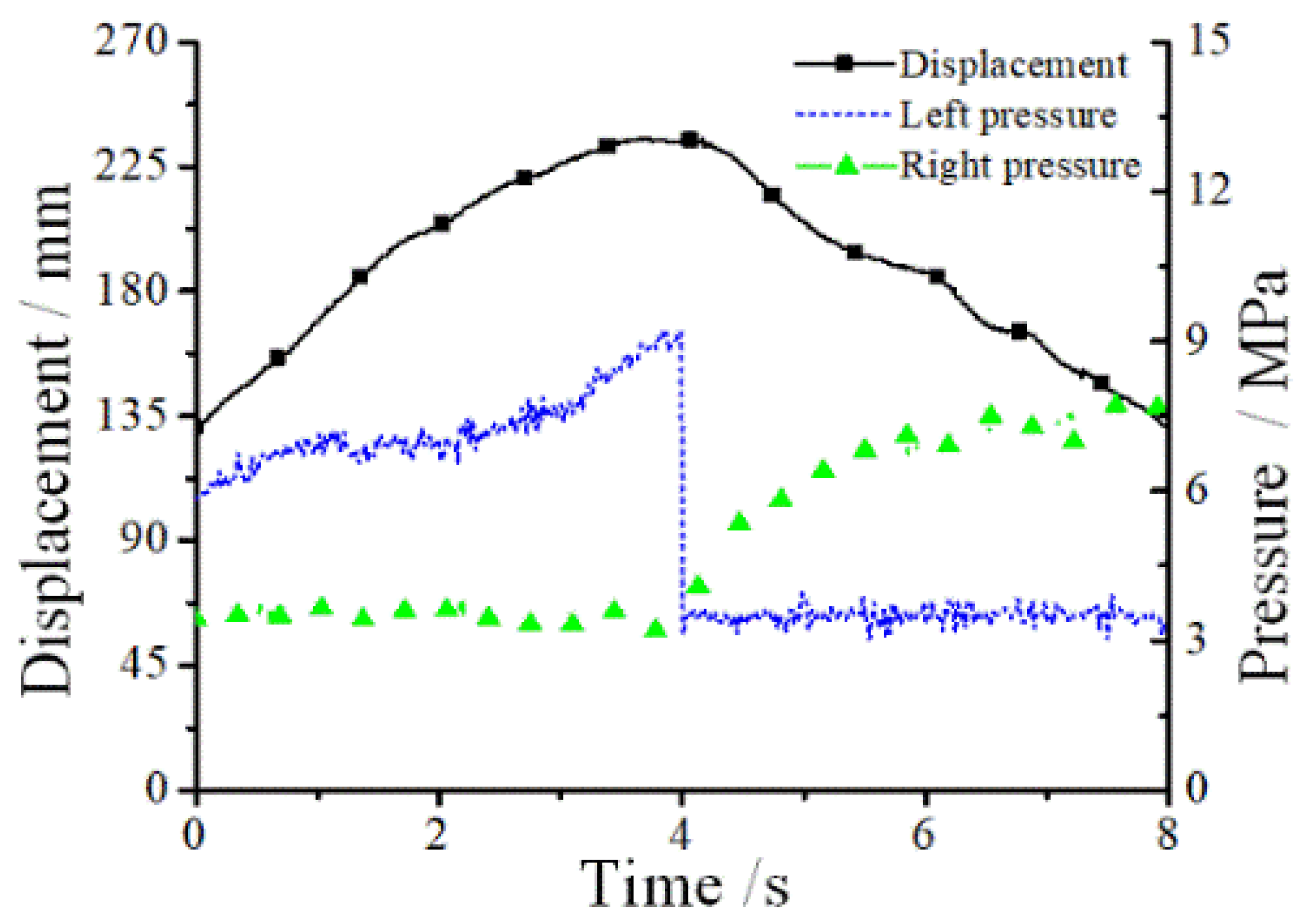
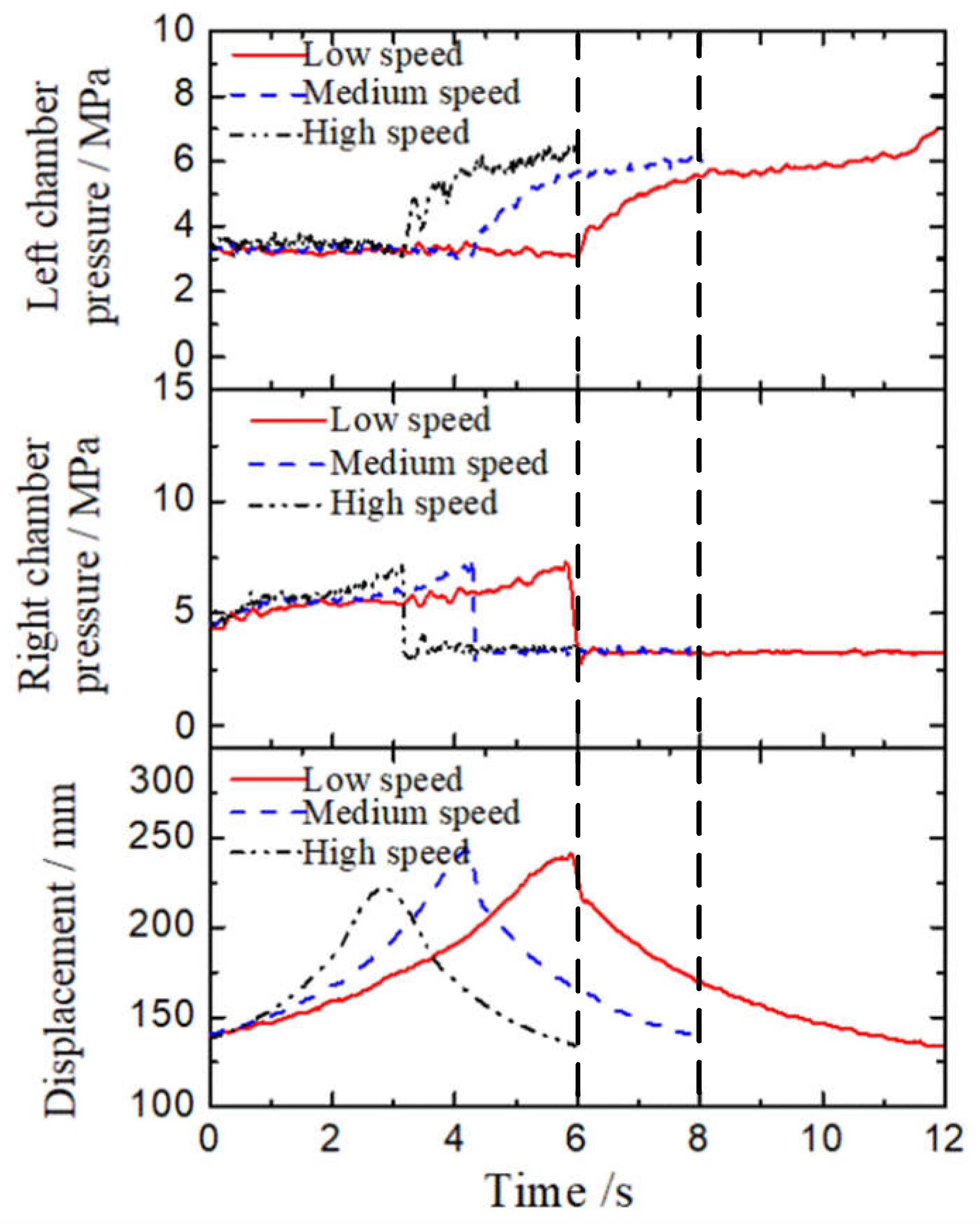
5.3. Experimental Results and Analysis
- Steering under the zero-load condition
- 2.
- Steering under normal load condition
- 3.
- Steering under offset load condition
- 4.
- Steering under different steering speeds
6. Conclusions
- (1)
- Through the closed-loop control strategy for the steering angle of the loader, the steering angle can accurately correspond to the angle of the electric control handle to achieve precise steering and improve the controllability of the loader steering system. Additionally, with the electric control handle as the steering lever, the mechanical connection of the traditional steering wheel is eliminated. Compared to the traditional steering wheel steering on the loader, the control range of the electric control handle is small, which greatly reduces the driver’s labor intensity. It provides a basis for electronic control development of the subsequent loader steering device.
- (2)
- Under various working conditions of in-place steering, the steering efficiency of the proposed closed-circuit pump-controlled electro-hydraulic flow matching steering system is more than 80%, which is higher than that of the loader’s traditional full hydraulic steering system. The energy consumption of the proposed system is reduced and the energy utilization of the proposed system is improved. It provides a reference for research into potential energy-saving of loader steering systems.
- (3)
- Using the proposed closed-circuit pump-controlled electro-hydraulic flow matching steering system, with increasing steering speed the steering efficiency increases accordingly. When the material is placed in the center of the loader bucket, the steering efficiency is also higher than that of the offset load and zero-load condition.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Li, Z.; Chen, Q. A double variable control load sensing system for electric hydraulic excavator. Energy 2021, 223, 119999. [Google Scholar] [CrossRef]
- Lajunen, A.; Sainio, P.; Laurila, L.; Pippuri-Mäkeläinen, J.; Tammi, K. Overview of Powertrain Electrification and Future Scenarios for Non-Road Mobile Machinery. Energies 2018, 11, 1184. [Google Scholar] [CrossRef] [Green Version]
- Bilgin, B.; Magne, P.; Malysz, P.; Yang, Y.; Pantelic, V.; Preindl, M.; Korobkine, A.; Jiang, W.; Lawford, M.; Emadi, A. Making the case for electrified transportation. IEEE Trans. Transp. Electrif. 2015, 1, 4–17. [Google Scholar] [CrossRef]
- Lajunen, A.; Leivo, A.; Lehmuspelto, T. Energy consumption simulations of a conventional and hybrid mining loader. In Proceedings of the 25th World Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition (EVS25), Shenzhen, China, 5–9 November 2010. [Google Scholar]
- Gao, L.; Jin, C.; Liu, Y.; Ma, F.; Feng, Z. Hybrid Model-Based Analysis of Underground Articulated Vehicles Steering Characteristics. Appl. Sci. 2019, 9, 5274. [Google Scholar] [CrossRef] [Green Version]
- Mulder, M.; Abbink, D.A.; Boer, E.R.; van Paassen, M.M. Human-centered Steer-by-Wire design: Steering wheel dynamics should be task dependent. In Proceedings of the IEEE International Conference on Systems, Seoul, Korea, 14–17 October 2012. [Google Scholar]
- Daher, N.; Ivantysynova, M. An Indirect Adaptive Velocity Controller for a Novel Steer-by-Wire System. J. Dyn. Syst. Meas. Control 2014, 136, 051012. [Google Scholar] [CrossRef]
- Eksioglu, M.; Kızılaslan, K. Steering-wheel grip force characteristics of drivers as a function of gender, speed, and road condition. Int. J. Ind. Ergon. 2008, 38, 354–361. [Google Scholar] [CrossRef]
- Cao, B.-W.; Liu, X.-H.; Chen, W.; Yang, K.; Tan, P. Skid-Proof Operation of Wheel Loader Based on Model Prediction and Electro-Hydraulic Proportional Control Technology. IEEE Access 2019, 8, 81–92. [Google Scholar] [CrossRef]
- Aly, M.; Roman, M.; Rabie, M.; Shaaban, S. Observer-Based Optimal Position Control for Electrohydraulic Steer-by-Wire System Using Gray-Box System Identified Model. J. Dyn. Syst. Meas. Control 2017, 139, 121002. [Google Scholar] [CrossRef]
- Daher, N.; Ivantysynova, M. Yaw stability control of articulated frame off-highway vehicles via displacement controlled steer-by-wire. Control Eng. Pract. 2015, 45, 46–53. [Google Scholar] [CrossRef]
- Iqbal, J.; Zuhaib, K.M.; Han, C.; Khan, A.M.; Ali, M.A. Adaptive Global Fast Sliding Mode Control for Steer-by-Wire System Road Vehicles. Appl. Sci. 2017, 7, 738. [Google Scholar] [CrossRef]
- Yih, P.; Gerdes, J.C. Steer-by-wire for vehicle state estimation and control. In Proceedings of the International Symposium on Advanced Vehicle Control Arnheim, Arnhem, The Netherlands, 23–27 August 2004. [Google Scholar]
- Arslan, M.S. A Hysteresis-Based Steering Feel Model for Steer-by-Wire Systems. Math. Probl. Eng. 2017, 2017, 2313529. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Zhou, J.; Li, B. Design of Adjustable Road Feeling Performance for Steering-by-Wire System. SAE Int. J. Veh. Dyn. Stability, NVH 2018, 2, 121–134. [Google Scholar] [CrossRef]
- Achyuthan, S.; Prakash, N.K. Modelling of a steer-by-wire system with force feedback and active steering. In Proceedings of the 2017 International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 15–16 June 2017. [Google Scholar]
- Xiao, Z.; Xiao, B. Research on road feeling control strategy for electric forklift steer-by-wire system. In Proceedings of the Industrial Electronics & Applications, Hefei, China, 5–7 June 2016; pp. 1744–1749. [Google Scholar]
- Wang, T.; Mi, J.; Cai, Z.; Chen, X.; Lian, X. Vehicle dual-redundancy electronic steering wheel system. In Proceedings of the 2017 5th International Conference on Mechanical, Automotive and Materials Engineering (CMAME), Guangzhou, China, 1–3 August 2017; pp. 183–187. [Google Scholar]
- Li, L.; Liu, B.; Zhao, G.; Sun, H. Study on fail-safe strategy of electric power steering system. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 4775–4779. [Google Scholar]
- Liu, P.Z. Automotive Wire Control Steering Sensor Fault Detection Algorithm Research. Appl. Mech. Mater. 2015, 727–728, 708–711. [Google Scholar]
- Linjama, M.; Koskinen, K.T.; Vilenius, M. Accurate Trajectory Tracking Control of Water Hydraulic Cylinder with Non-Ideal on/off Valves. Int. J. Fluid Power 2003, 4, 7–16. [Google Scholar] [CrossRef]
- Yan, X.; Quan, L.; Yang, J. Analysis on steering characteristics of wheel loader based on electric-hydraulic flow matching principle. Trans. Chin. Soc. Agric. Eng. 2015, 31, 71–78. [Google Scholar]
- Dell’Amico, A.; Krus, P. Modeling, Simulation, and Experimental Investigation of an Electrohydraulic Closed-Center Power Steering System. IEEE/ASME Trans. Mechatron. 2015, 20, 2452–2462. [Google Scholar] [CrossRef] [Green Version]
- Minav, T.; Heikkinnen, J.; Pyne, S.; Haikio, S.; Nykanen, J.; Pietola, M. Analysis of novel zonal two-cylinder actuation system for heavy loads. In Proceedings of the 12th International Fluid Power Conference, Online, 12–14 October 2020. [Google Scholar]
- Daher, N.; Ivantysynova, M. Energy analysis of an original steering technology that saves fuel and boosts efficiency. Energy Convers. Manag. 2014, 86, 1059–1068. [Google Scholar] [CrossRef]
- Pu, X.; Chen, Y.; Han, J. Design and analysis of steer by wire system of loader. Chin. Hydraul. Pneum. 2015, 26–31. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Parameter |
|---|---|
| Pump | Displacement: 30 mL/r; Max pressure: 350 bar |
| Motor | Rated power: 49 kW; Rated torque: 260 N·m |
| Supply pump | Displacement: 10.2 mL/r; Max pressure: 315 bar |
| Auxiliary motor | Rated power: 2.5 kW |
| Electromagnetic directional valve | Max flow: 8 L/min; Max pressure: 315 bar |
| Motor controller | Rated power: 60 kW; Voltage range: 300~720 VDC |
| Pilot handle | Operating angle: ±34°; Positioning accuracy: <0.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, T.; Wu, B.; Lin, T.; Chen, H.; Chen, Q. Closed-Circuit Pump-Controlled Electro-Hydraulic Steering System for Pure Electric Wheel Loader. Appl. Sci. 2022, 12, 5740. https://doi.org/10.3390/app12115740
Guo T, Wu B, Lin T, Chen H, Chen Q. Closed-Circuit Pump-Controlled Electro-Hydraulic Steering System for Pure Electric Wheel Loader. Applied Sciences. 2022; 12(11):5740. https://doi.org/10.3390/app12115740
Chicago/Turabian StyleGuo, Tong, Biao Wu, Tianliang Lin, Honghui Chen, and Qihuai Chen. 2022. "Closed-Circuit Pump-Controlled Electro-Hydraulic Steering System for Pure Electric Wheel Loader" Applied Sciences 12, no. 11: 5740. https://doi.org/10.3390/app12115740
APA StyleGuo, T., Wu, B., Lin, T., Chen, H., & Chen, Q. (2022). Closed-Circuit Pump-Controlled Electro-Hydraulic Steering System for Pure Electric Wheel Loader. Applied Sciences, 12(11), 5740. https://doi.org/10.3390/app12115740