
An Edge Detection Method Based on Local Gradient Estimation: Application to High-Temperature Metallic Droplet Images




Abstract
:1. Introduction
2. Materials and Methods
2.1. Gradient-Based Edge Detection
2.2. Active Contour Model
2.3. Crowdsourcing-Based Detection
2.4. Proposed Algorithm Pipeline
| Algorithm 1: An edge detection algorithm based on local gradient estimation |
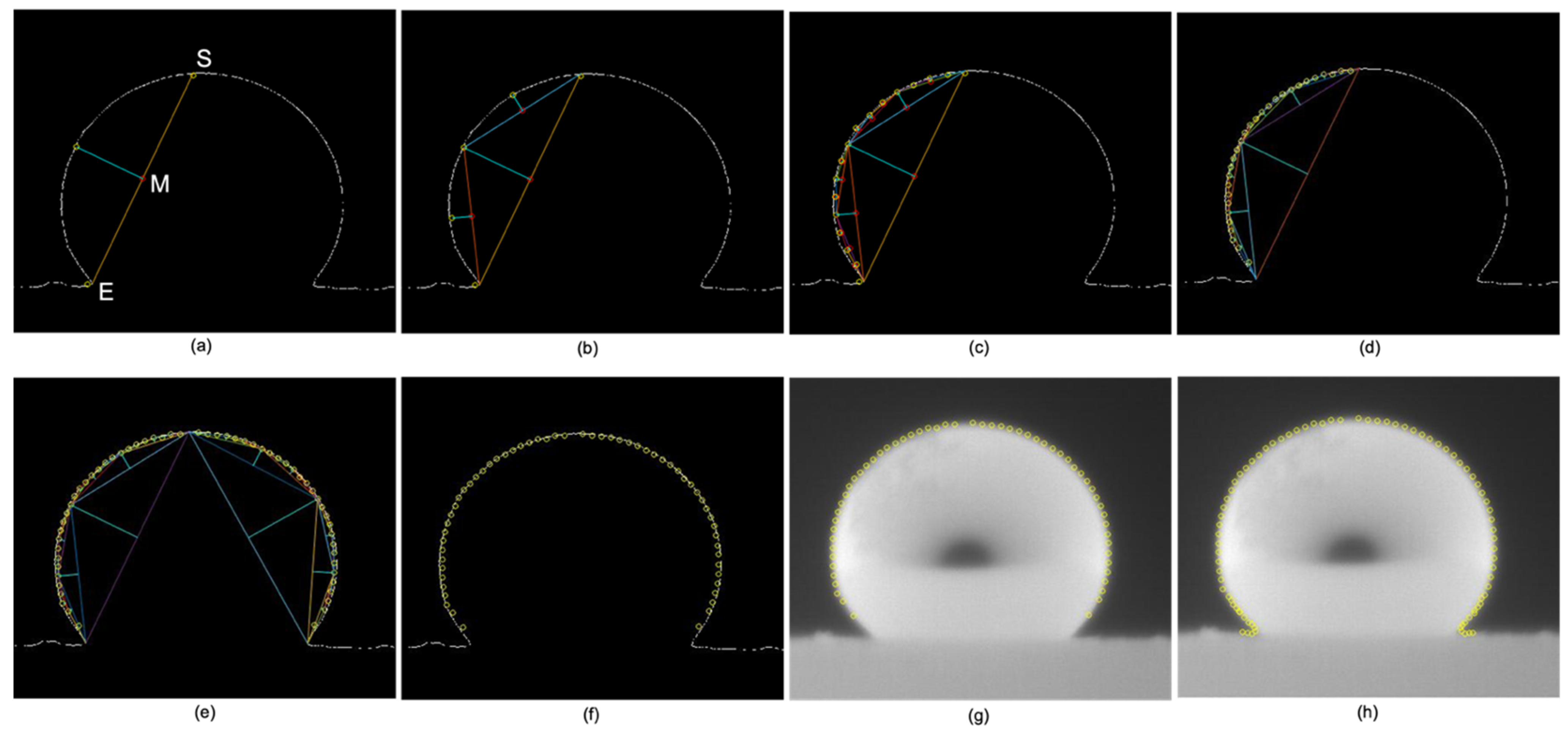
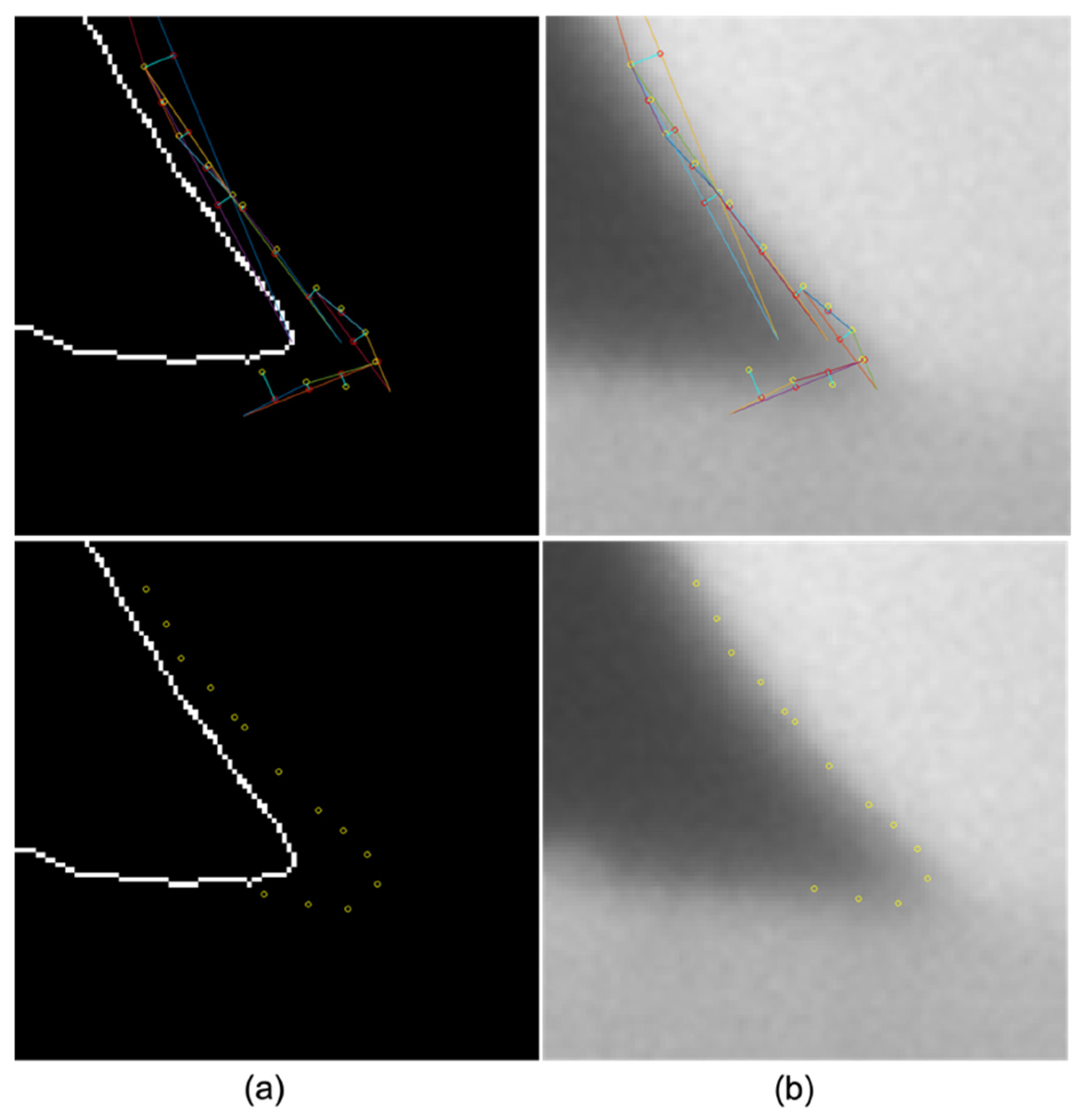
| Input: IMAGE, an image of a copper specimen; Output: OUT, a set of edge points; Convert a grayscale image to a binary image based on threshold; Call activecontour with image, mask; Call edge with segmented image; Find LIND indices and values of nonzero elements on the edge line; Return the matrices r and c containing the equivalent row and column in the matrix LIND; Find S the point on top of the droplet; Find E the contact point between the droplet and the base on the left side; Compute M the midpoint between S and E; Calculate Grad the gradient along the bisector passing through M; OUT max(Grad); Repeat the previous process between each two successive edge points starting at (S) and ending with (E), Return OUT; |
3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Azeroual, A.; Afdel, K. Fast Image Edge Detection based on Faber Schauder Wavelet and Otsu Threshold. Heliyon 2017, 3, e00485. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dhankhar, P.; Sahu, N. A Review and Research of Edge Detection Techniques for Image Segmentation. Int. J. Comput. Sci. Mob. Comput. 2013, 2, 86–92. [Google Scholar]
- Basu, M. Gaussian-based edge-detection methods—A survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2002, 32, 252–260. [Google Scholar] [CrossRef] [Green Version]
- Ziou, D.; Tabbone, S. Edge detection techniques—An overview. Pattern Recognit. Image Anal. C/C Raspoznavaniye Obraz. I Anal. Izobr. 1998, 8, 537–559. [Google Scholar]
- Yong, T. An active contour for segmentation of images of low contrast and blurred boundaries. In Proceedings of the 2017 International Conference on Computer, Information and Telecommunication Systems (CITS), Dalian, China, 21–23 July 2017; pp. 78–82. [Google Scholar]
- Fabijanska, A.; Sankowski, D. Aura removal algorithm for high-temperature image quantitative analysis systems. In Proceedings of the 2007 14th International Conference on Mixed Design of Integrated Circuits and Systems, Ciechocinek, Poland, 21–23 June 2007; pp. 617–621. [Google Scholar]
- Fabijańska, A.; Strzecha, K.; Koszmider, T.; Bąkała, M. Refining edges to sub-pixel level in images of molten metals and alloys. Autom./Akad. Górniczo-Hut. Im. Stanisława Staszica W Krakowie 2010, 14, 411–422. [Google Scholar]
- Hu, X.; Wang, H.; Vegesana, A.; Dube, S.; Yu, K.; Kao, G.; Chen, S.H.; Lu, Y.H.; Thiruvathukal, G.K.; Yin, M. Crowdsourcing detection of sampling biases in image datasets. In Proceedings of the Web Conference, Taipei, Taiwan, 20 April 2020; pp. 2955–2961. [Google Scholar]
- Fabijańska, A.; Sankowski, D. Computer vision system for high temperature measurements of surface properties. Mach. Vis. Appl. 2009, 20, 411–421. [Google Scholar] [CrossRef]
- Sankowski, D.; Senkara, J.; Strzecha, K.; Jezewski, S. Automatic investigation of surface phenomena in high temperature solid and liquid contacts. In Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference. Rediscovering Measurement in the Age of Informatics, IMTC 2001, Budapest, Hungary, 21–23 May 2001; Volume 2, pp. 1397–1400. [Google Scholar]
- Hoorfar, M.; Neumann, A.W. Axisymmetric drop shape analysis (ADSA) for the determination of surface tension and contact angle. J. Adhes. 2004, 80, 727–743. [Google Scholar] [CrossRef]
- Li, L.; Kang, W.; Ye, D. A Contact Angle Measurement Method for the Droplets in EWOD-based Chips. In Proceedings of the 2nd IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Bangkok, Thailand, 16–19 January 2007; pp. 1071–1075. [Google Scholar]
- Atefi, E.; Mann, J.A.; Tavana, H.A. Robust Polynomial Fitting Approach for Contact Angle Measurements. Langmuir 2013, 29, 5677–5688. [Google Scholar] [CrossRef]
- Chini, S.F.; Amirfazli, A. A method for measuring contact angle of asymmetric and symmetric drops. Colloids Surf. A Physicochem. Eng. Asp. 2011, 388, 29–37. [Google Scholar] [CrossRef]
- Mirzaei, M. A new method for measuring the contact angles from digital images of liquid drops. Micron 2017, 102, 65–72. [Google Scholar] [CrossRef]
- Ríos-López, I.; Karamaoynas, P.; Zabulis, X.; Kostoglou, M.; Karapantsios, T.D. Image analysis of axisymmetric droplets in wetting experiments: A new tool for the study of 3D droplet geometry and droplet shape reconstruction. Colloids Surf. A Physicochem. Eng. Asp. 2018, 553, 660–671. [Google Scholar] [CrossRef]
- Strzecha, K. Selected Algorithms of Quantitative Image Analysis for Measurements of Properties Characterizing Interfacial Interactions at High Temperatures; Wydawnictwo Politechniki Łódzkiej: Łódź, Poland, 2016. [Google Scholar]
- Strzecha, K. A new image analysis algorithm for contact angle measurement at high temperature. Meas. Sci. Technol. 2019, 31, 035403. [Google Scholar] [CrossRef]
- Kunt, M. Edge detection: A tuttorial review. In Proceedings of the ICASSP’82, IEEE International Conference on Acoustics, Speech, and Signal Processing, Paris, France, 3–5 May 1982; Volume 7, pp. 1172–1175. [Google Scholar]
- Shrivakshan, G.T.; Chandrasekar, C. A Comparison of various Edge Detection Techniques used in Image Processing. Int. J. Comput. Sci. Issues 2012, 9, 269–276. [Google Scholar]
- Kass, M.; Witkin, A. Snakes: Active Contour Models; KIuwer Academic Publishers: Alphen Aan Den Rijn, The Netherlands, 1988. [Google Scholar]
- Caselles, V.; Kimmel, R.; Sapiro, G. Geodesic Active Contours. Int. J. Comput. Vis. 1997, 22, 61–79. [Google Scholar] [CrossRef]
- Ping Tian, D. A review on image feature extraction and representation techniques. Int. J. Multimed. Ubiquitous Eng. 2013, 8, 385–396. [Google Scholar]
- Li, C.; Kao, C.Y.; Gore, J.C.; Ding, Z. Minimization of region-scalable fitting energy for image segmentation. IEEE Trans. Image Process. 2008, 17, 1940–1949. [Google Scholar]
- Gadiraju, U.; Kawase, R.; Dietze, S.; Demartini, G. Understanding malicious behavior in crowdsourcing platforms: The case of online surveys. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015; pp. 1631–1640. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–165. [Google Scholar]
- Xu, X.; Xu, S.; Jin, L.; Song, E. Characteristic analysis of Otsu threshold and its applications. Pattern Recognit. Lett. 2011, 32, 956–961. [Google Scholar] [CrossRef]
- Mumford, D.; Shah, J. Optimal approximations by piecewise smooth functions and associated variational problems. Commun. Pure Appl. Math. 1989, 42, 577–685. [Google Scholar] [CrossRef] [Green Version]
- Sobel, I.; Feldman, G. A 3x3 Isotropic Gradient Operator for Image Processing. A Talk at the Stanford Artificial Project; 1968; pp. 271–272. Available online: https://www.researchgate.net/publication/285159837_A_33_isotropic_gradient_operator_for_image_processing (accessed on 26 April 2022).
- Vincent, O.; Folorunso, O. A Descriptive Algorithm for Sobel Image Edge Detection. Proc. Inf. Sci. ITeducation Conf. InSITE 2009, 40, 97–107. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
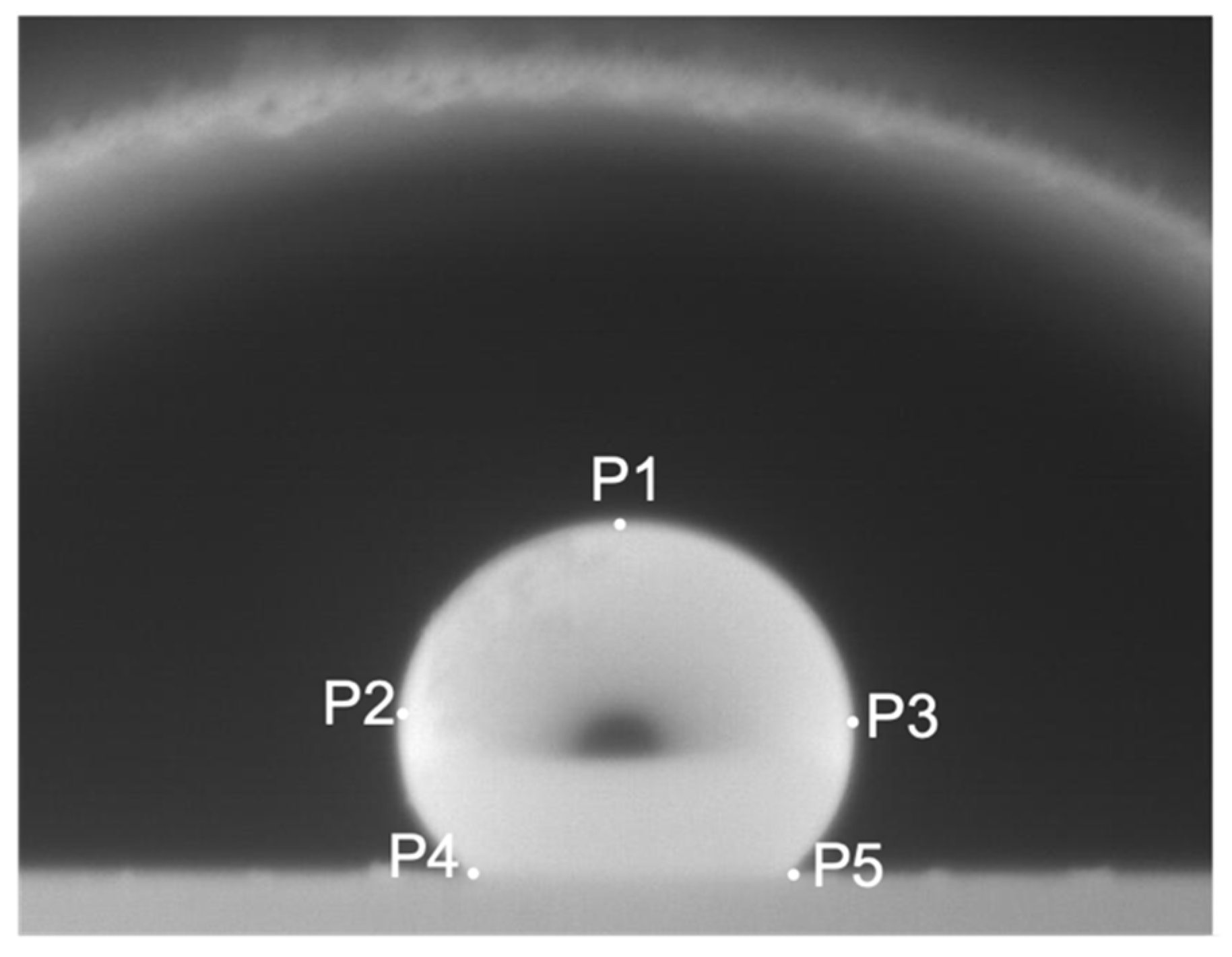
| Methods | Active Contour | Local Gradient Estimation Edge Detection | Ground Truth (Mean Value) |
|---|---|---|---|
| Highest point | P1 [646, 535] | P1 [661, 538] | P1 [653, 537] |
| Left equator point | P2 [412, 757] | P2 [418, 755] | P2 [415, 752] |
| Right equator point | P3 [903, 757] | P3 [899, 749] | P3 [901, 749] |
| Left contact point | P4 [466, 904] | P4 [483, 908] | P4 [487, 911] |
| Right contact point | P5 [853, 905] | P5 [838, 908] | P5 [835, 911] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al Darwich, R.; Babout, L.; Strzecha, K. An Edge Detection Method Based on Local Gradient Estimation: Application to High-Temperature Metallic Droplet Images. Appl. Sci. 2022, 12, 6976. https://doi.org/10.3390/app12146976
Al Darwich R, Babout L, Strzecha K. An Edge Detection Method Based on Local Gradient Estimation: Application to High-Temperature Metallic Droplet Images. Applied Sciences. 2022; 12(14):6976. https://doi.org/10.3390/app12146976
Chicago/Turabian StyleAl Darwich, Ranya, Laurent Babout, and Krzysztof Strzecha. 2022. "An Edge Detection Method Based on Local Gradient Estimation: Application to High-Temperature Metallic Droplet Images" Applied Sciences 12, no. 14: 6976. https://doi.org/10.3390/app12146976
APA StyleAl Darwich, R., Babout, L., & Strzecha, K. (2022). An Edge Detection Method Based on Local Gradient Estimation: Application to High-Temperature Metallic Droplet Images. Applied Sciences, 12(14), 6976. https://doi.org/10.3390/app12146976