
Parallel Accelerated Fifth-Order WENO Scheme-Based Pipeline Transient Flow Solution Model


Abstract
:Featured Application
Abstract
1. Introduction
2. Control Equations
3. Numerical Calculation Method
3.1. Numerical Flux Decomposition
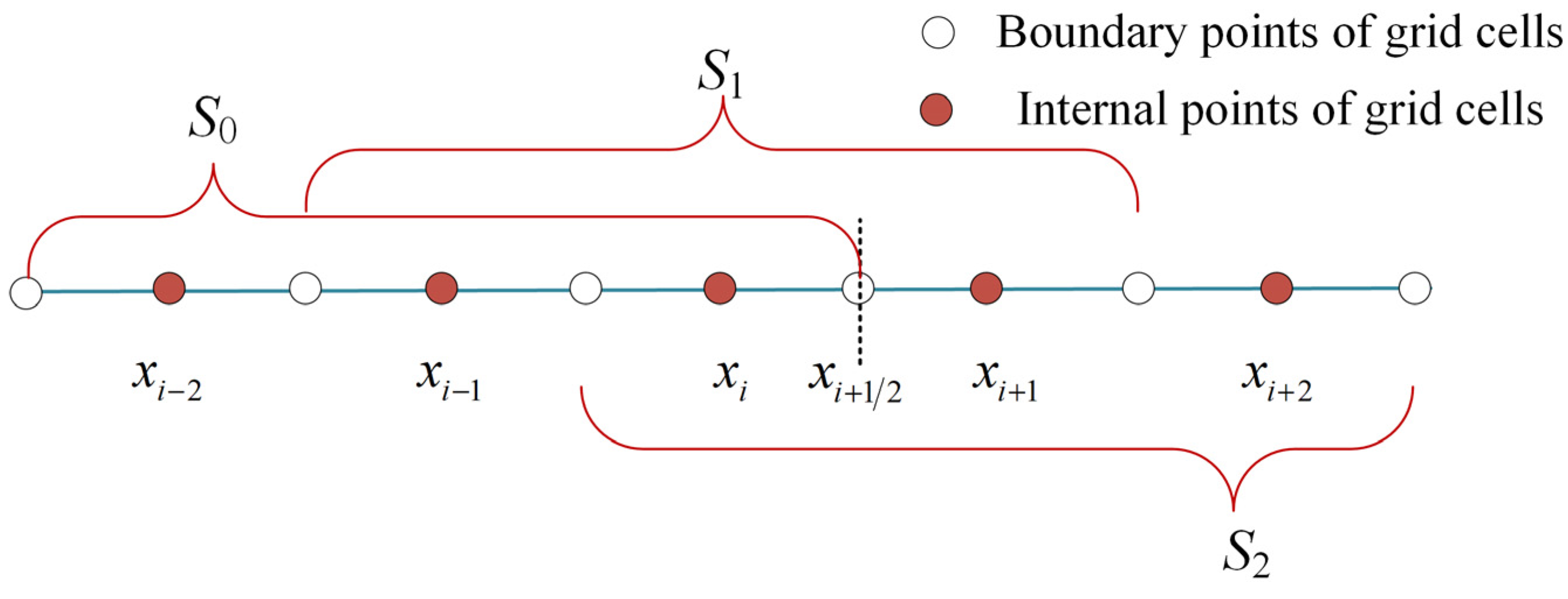
3.2. Fifth-Order WENO Scheme Flux Reconstruction
3.3. Time Layer Discrete Method
3.4. Boundary Condition Processing
3.4.1. Upstream Boundary Conditions
3.4.2. Downstream Boundary Conditions
3.4.3. Bifurcated Pipe Interface Handling
4. GPU Acceleration Implementation Method
4.1. CPU and GPU Related Parameters
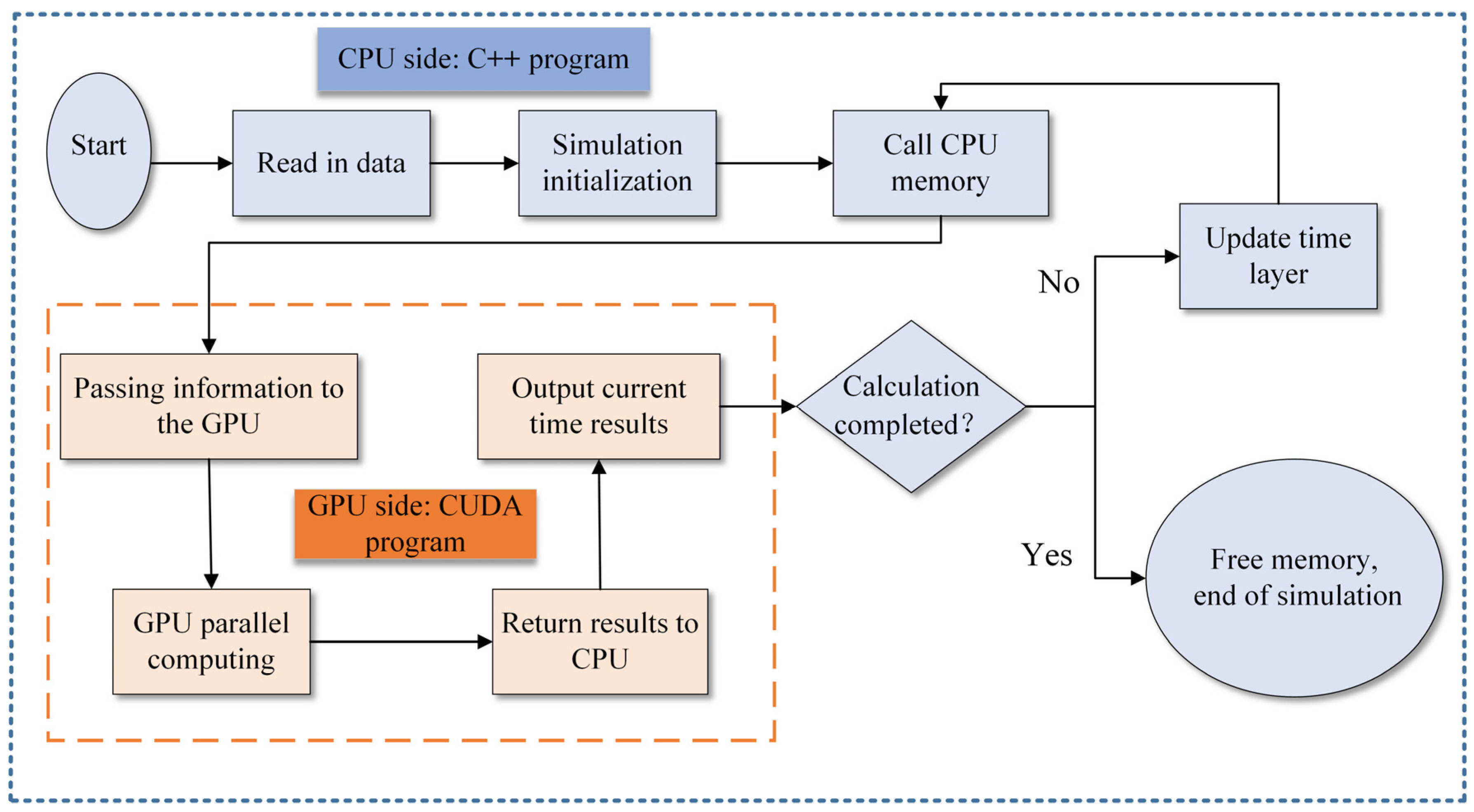
4.2. GPU Accelerated Parallel Computing Process
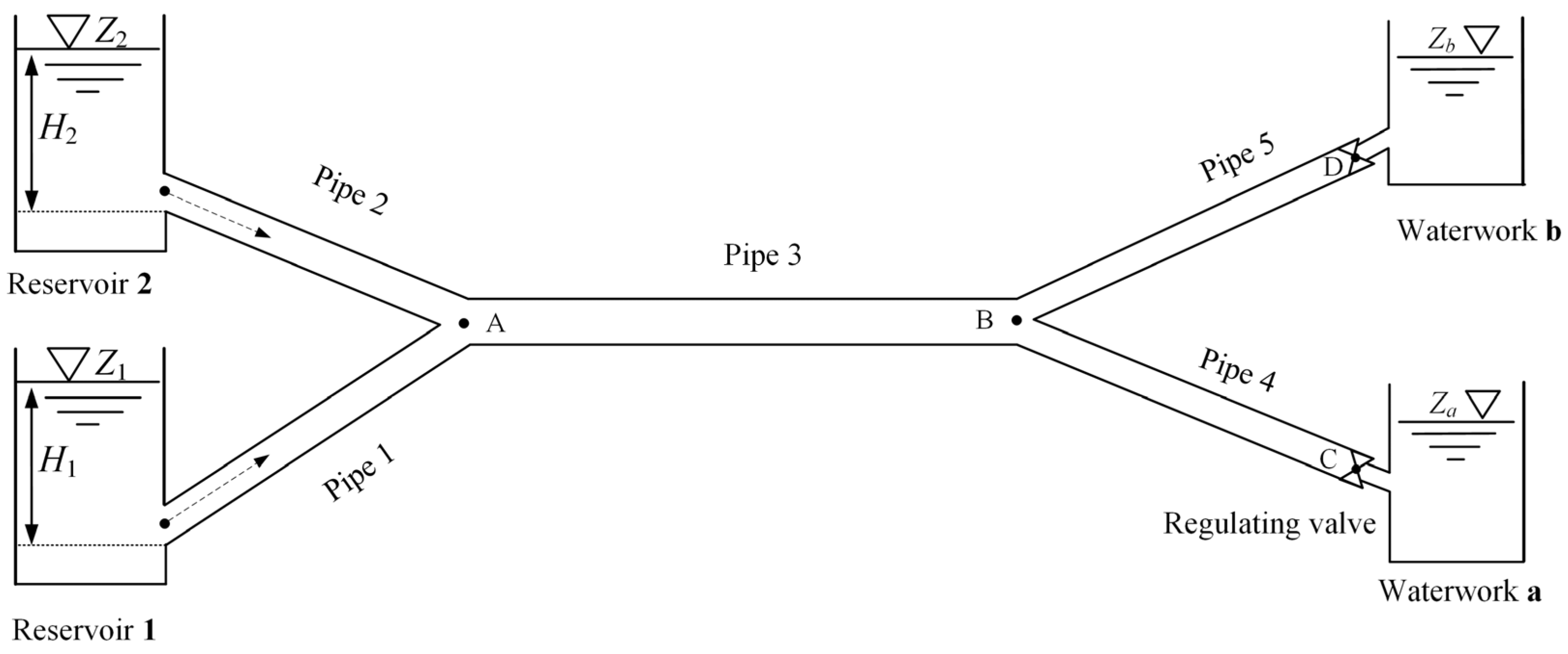
5. Model Validation and Case Analysis
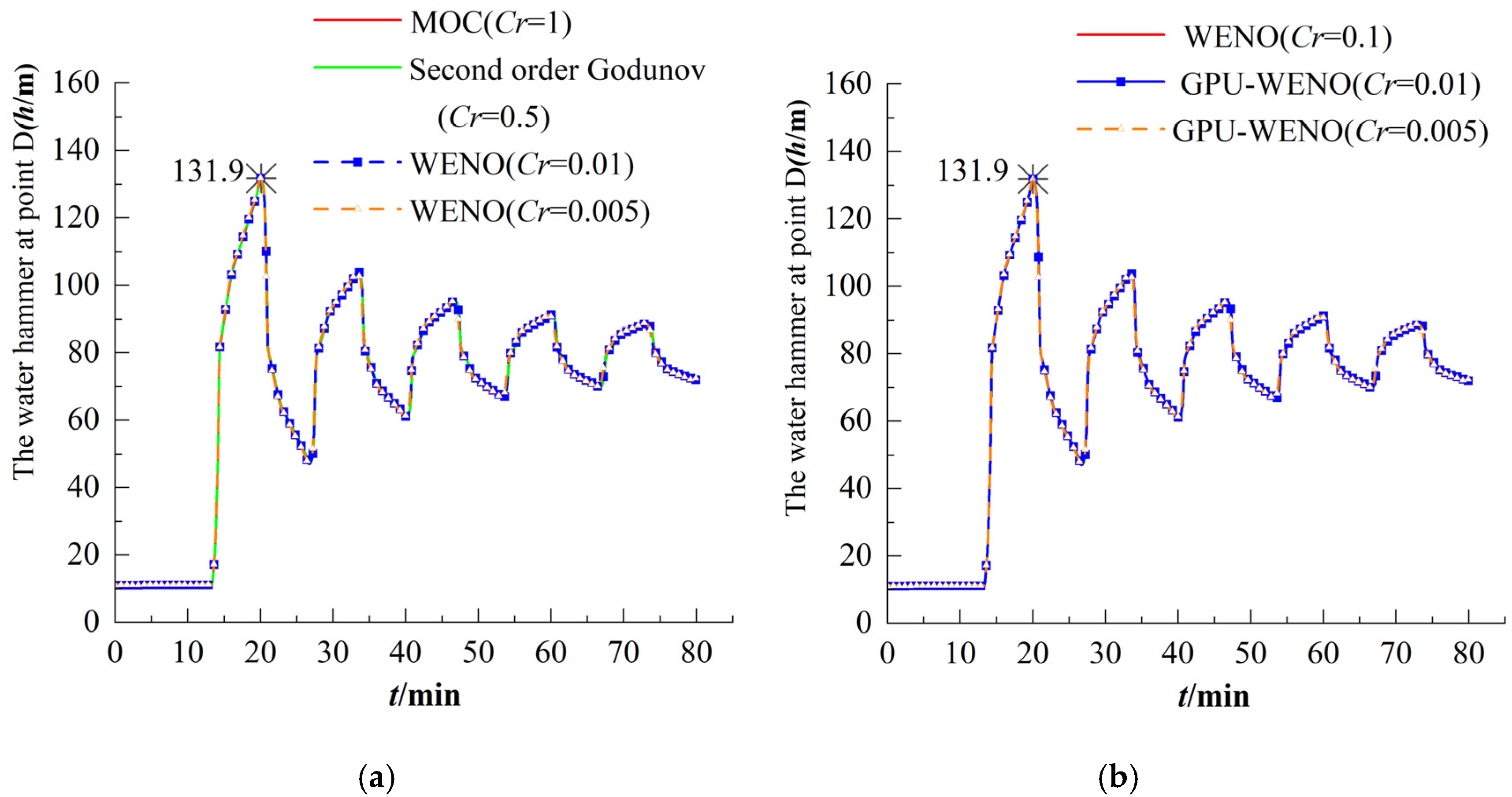
5.1. Parameter Sensitivity Analysis
5.2. Model Application and GPU Acceleration Performance Evaluation
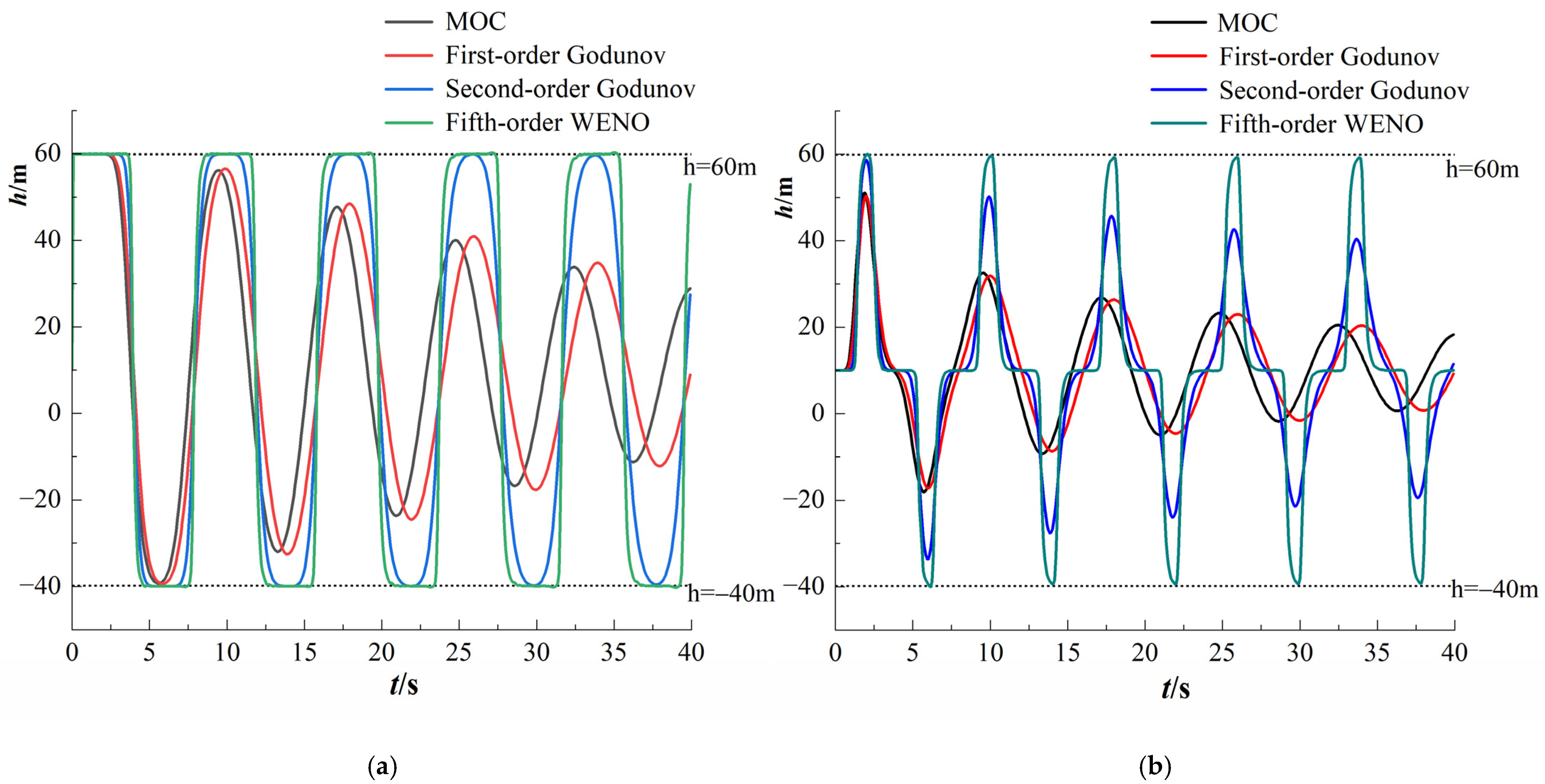
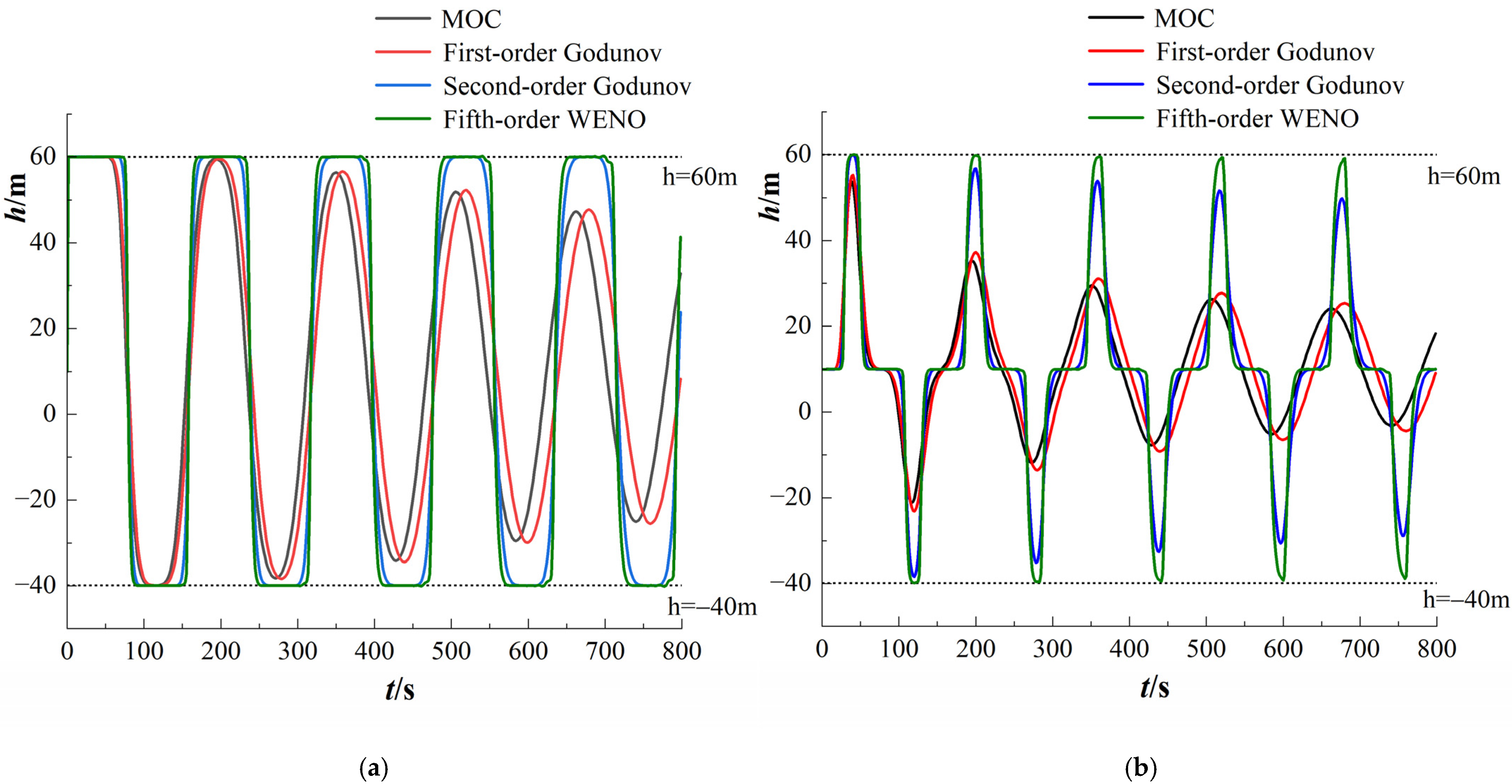
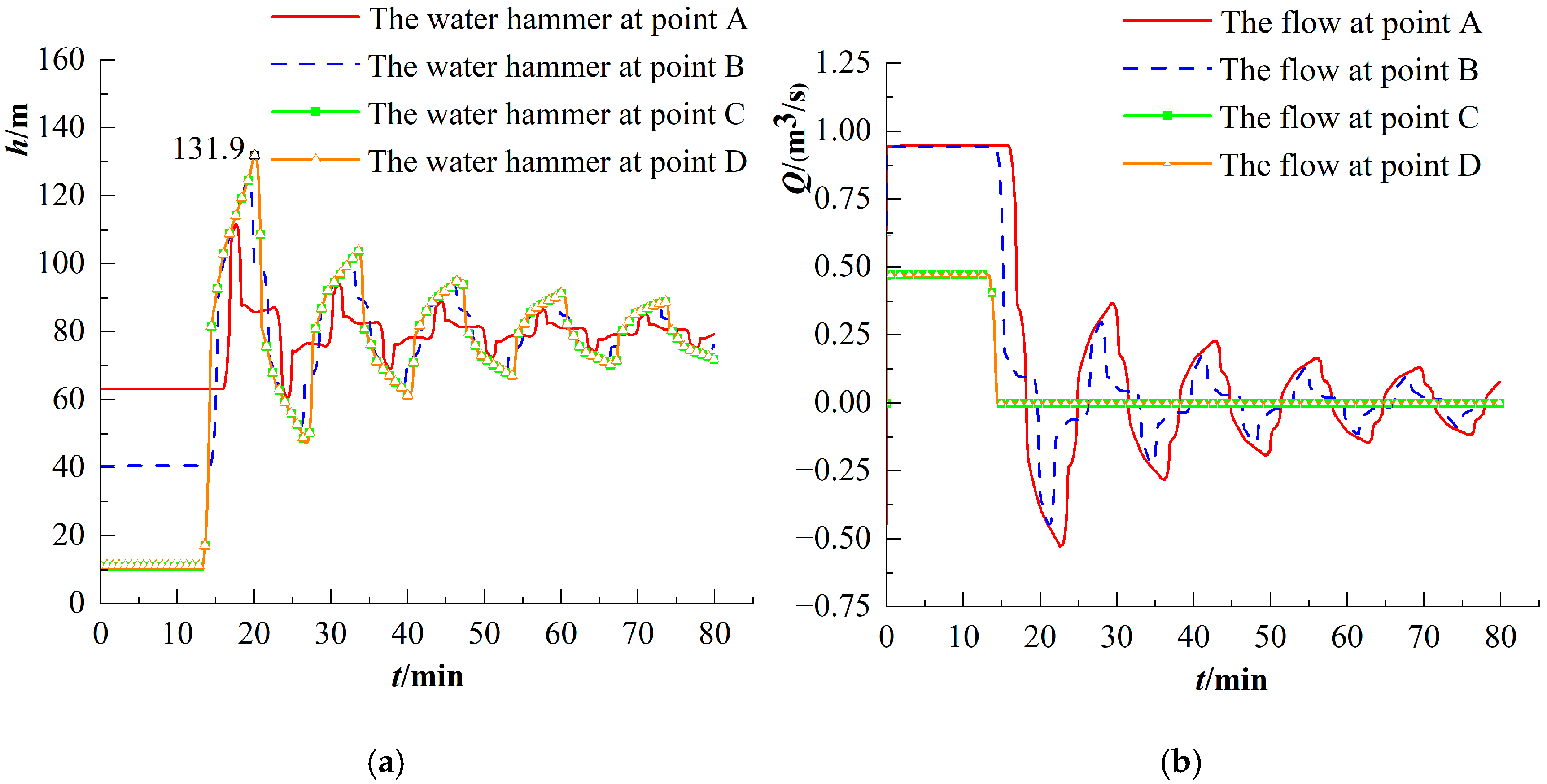
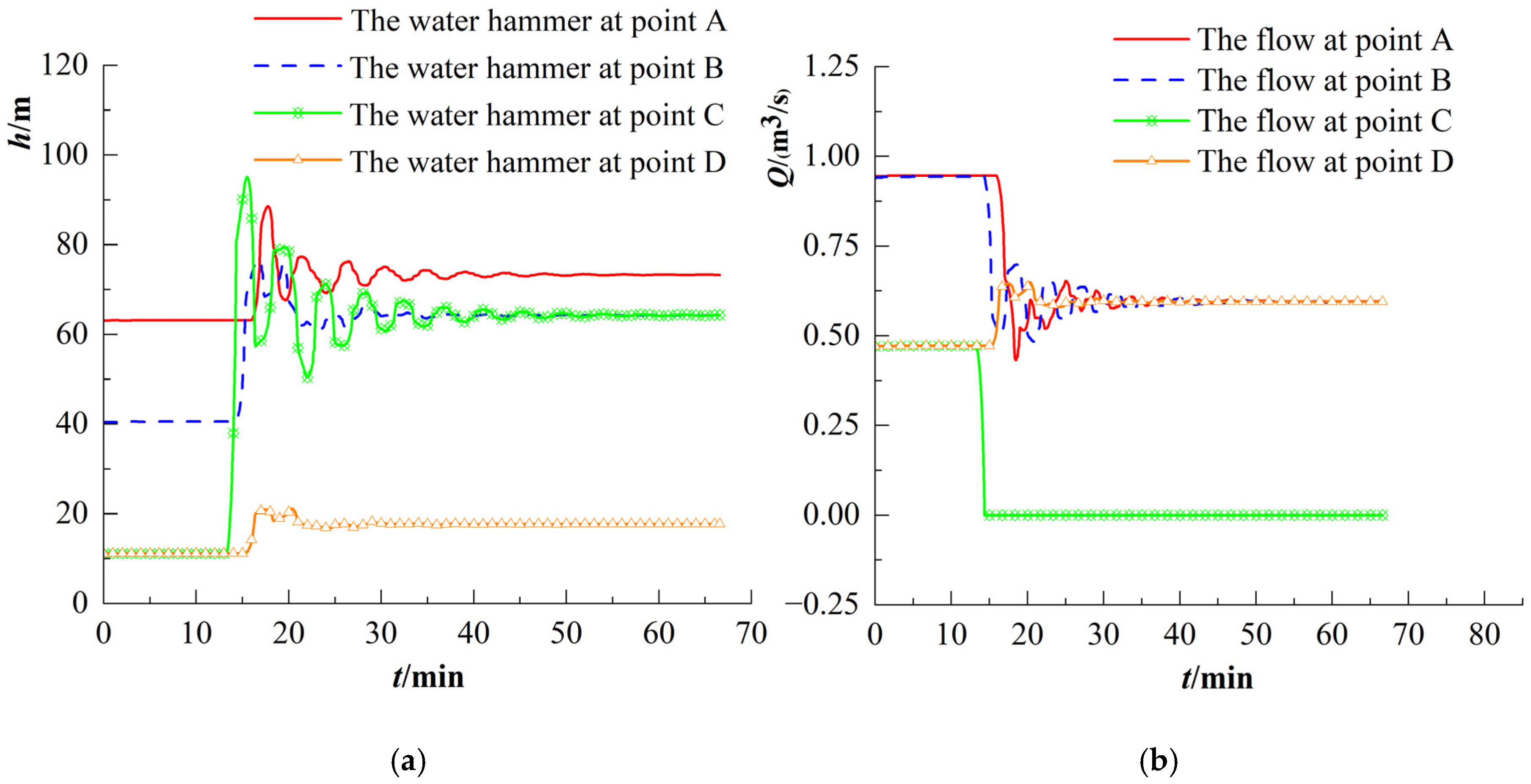
5.2.1. Comparative Analysis of the Results of Different Simulation Methods
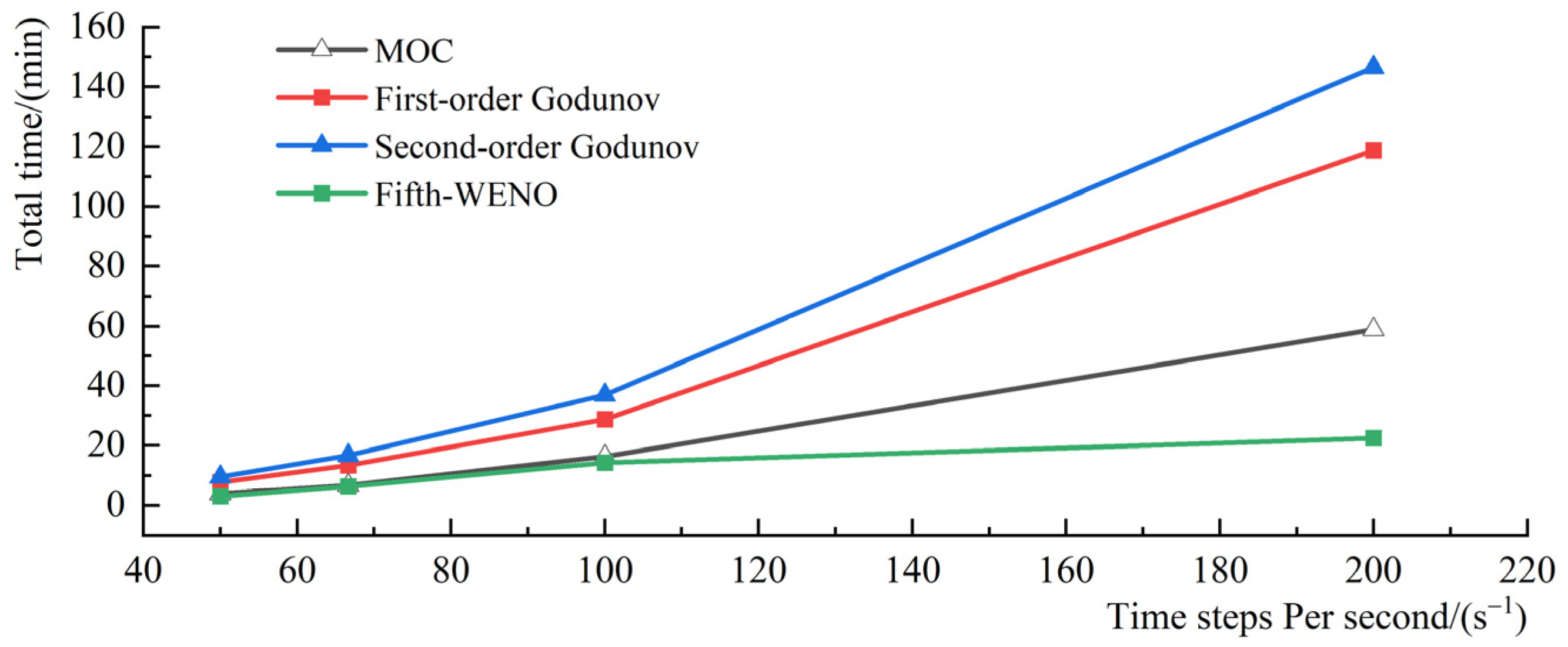
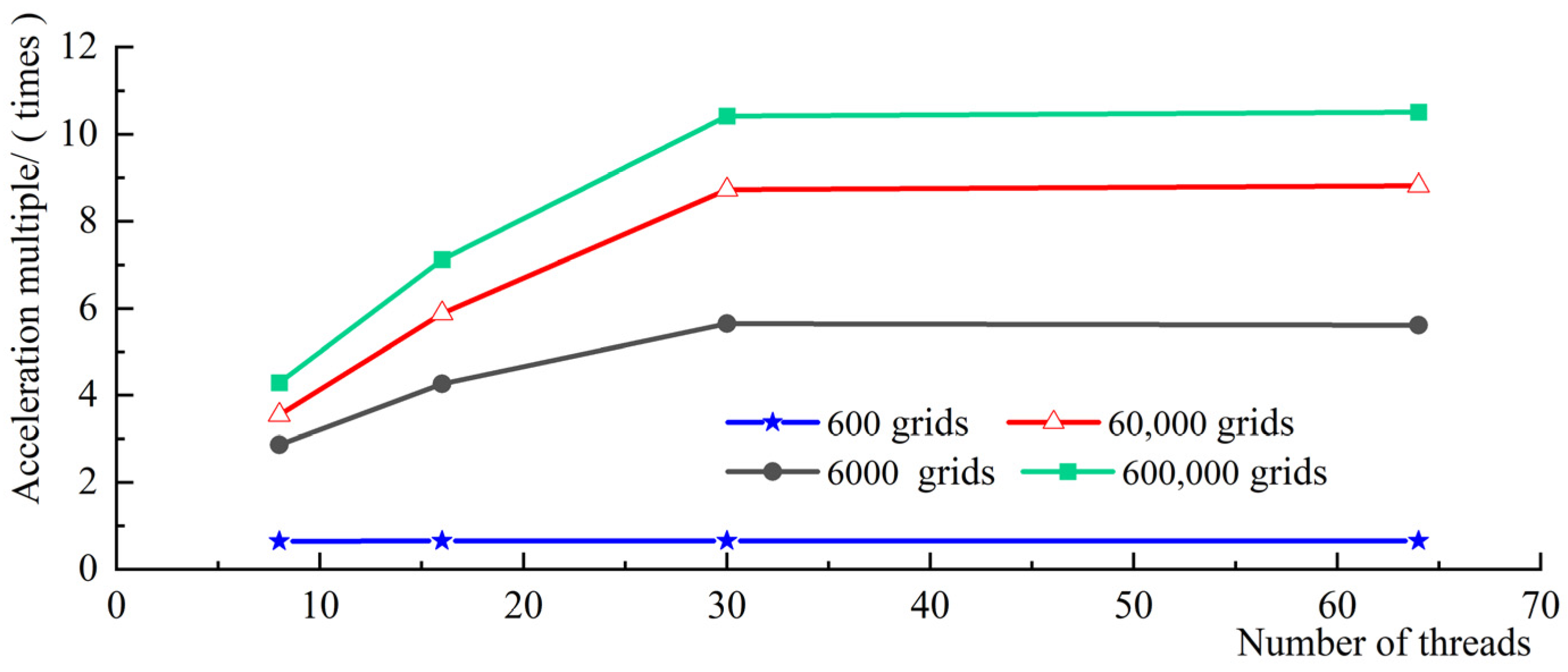
5.2.2. Analysis of Model Computation Efficiency and GPU Acceleration Performance
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Pipe cross-sectional area (m2); | |
| Coefficient matrix and the linearized coefficient matrix; | |
| Water hammer wave speed in the pipeline (m); | |
| Weighting coefficients; | |
| Pipe diameter (m); | |
| Pipeline resistance coefficient; | |
| ; | |
| , and the positive and negative split flux terms; | |
| Acceleration due to gravity (m/s2); | |
| Pressure head in the upstream reservoir area and pressure head at the valve at constant flow (m); | |
| (m); | |
| Time step; | |
| in the pipeline; | |
| Templates for WENO scheme; | |
| Source terms; | |
| Computing time (s); | |
| Flow variable; | |
| , respectively; | |
| Intermediate flow variables for Runge-Kutta scheme; | |
| (m/s); | |
| Average velocity and maximum velocity (m/s); | |
| Distance from the most upstream (m); | |
| ; | |
| Maximum eigenvalue of Jacobian matrix; | |
| Linear combination coefficients; | |
| ; | |
| Positive and negative eigenvalues of the Jacobian matrix; | |
| The angle between the pipe and horizontal plane; | |
| Linear combination coefficient weight; | |
| Template smoothness functions; |
| MOC | Method of characteristics; |
| WENO | Weighted Essentially non-oscillatory; |
| GPU | Graphic Processing Unit; |
| CPU | Central Processing Unit; |
| TVD | Total Variation Diminishing; |
| ENO | Essentially non-oscillatory; |
| CUDA | Compute Unified Device Architecture; |
References
- Wu, D.; Yang, S.; Wu, P.; Wang, L. MOC-CFD Coupled Approach for the Analysis of the Fluid Dynamic Interaction between Water Hammer and Pump. J. Hydraul. Eng. 2015, 141, 06015003. [Google Scholar] [CrossRef]
- Adamkowski, A.; Henclik, S.; Janicki, W.; Lewandowski, M. The influence of pipeline supports stiffness onto the water hammer run. Eur. J. Mech. B/Fluids 2017, 61, 297–303. [Google Scholar] [CrossRef] [Green Version]
- Boran, Z.; Wuyi, W.; Mengshan, S.J.W. Experimental and Numerical Simulation of Water Hammer in Gravitational Pipe Flow with Continuous Air Entrainment. Water 2018, 10, 928. [Google Scholar]
- Harten, A. High Resolution Schemes for Hyperbolic Conservation Laws. J. Comput. Phys. 1983, 49, 357–393. [Google Scholar] [CrossRef] [Green Version]
- Wylie, E.B.; Streeter, V.L. Fluid Transients in Systems; Prentice Hall: Hoboken, NJ, USA, 1993. [Google Scholar]
- Chaudhry, M.H.; Hussaini, M.Y. Second-Order Accurate Explicit Finite-Difference Schemes for Waterhammer Analysis. J. Fluids Eng. Trans. Asme 1985, 107, 523–529. [Google Scholar] [CrossRef]
- Wan, W.; Huang, W. Water hammer simulation of a series pipe system using the MacCormack time marching scheme. Acta Mech. 2018, 229, 3143–3160. [Google Scholar] [CrossRef]
- Wylie, E.B.; Stoner, M.A.; Streeter, V.L. Network System Transient Calculations by Implicit Method. Soc. Pet. Eng. J. 1971, 11, 356–362. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, Y.; Wang, T.; Han, W.; Wu, R.; Wang, P.; Wang, Q.; Zhou, L.J.W. An Experimental Study on the Water Hammer with Cavity Collapse under Multiple Interruptions. Water 2020, 12, 2566. [Google Scholar] [CrossRef]
- Zhao, M.; Mohamed, S.; Ghidaoui, M.A. Godunov-Type Solutions for Water Hammer Flows. J. Hydraul. Eng. 2004, 130, 341–348. [Google Scholar] [CrossRef]
- Waagan, K. A positive MUSCL-Hancock scheme for ideal magnetohydrodynamics. J. Comput. Phys. 2009, 228, 8609–8626. [Google Scholar] [CrossRef] [Green Version]
- Harten, A.; Engquis, B.; Osher, S.; Chakravarthy, S.R. Uniformly high order accurate essentially non-oscillatory schemes, III. J. Comput. Phys. 1987, 71, 231–303. [Google Scholar] [CrossRef]
- Li, X.; Li, G.; Ge, Y. Improvement of third-order finite difference WENO scheme at critical points. Int. J. Comput. Fluid Dyn. 2019, 34, 1–13. [Google Scholar] [CrossRef]
- Jiang, G.; Shu, C. Efficient Implementation of Weighted ENO Schemes. J. Comput. Phys. 1996, 126, 202–228. [Google Scholar] [CrossRef] [Green Version]
- Vukovic, S.; Sopta, L. ENO and WENO Schemes with the Exact Conservation Property for One-Dimensional Shallow Water Equations. J. Comput. Phys. 2002, 179, 593–621. [Google Scholar] [CrossRef]
- Liu, X.; Osher, S.; Chan, T.F. Weighted essentially non-oscillatory schemes. J. Comput. Phys. 1994, 115, 200–212. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Qiu, J. A new fifth order finite difference WENO scheme for solving hyperbolic conservation laws. J. Comput. Phys. 2016, 318, 110–121. [Google Scholar] [CrossRef]
- Li, X.; Li, G.; Ge, Y. High-accuracy numerical simulations on dam break flows with improved weno scheme. Chin. J. Hydrodyn. 2019, 34, 512–519. [Google Scholar]
- Li, G.; Li, X.; Li, P.; Cai, D. An improved third-order finite difference weighted essentially nonoscillatory scheme for hyperbolic conservation laws. Int. J. Numer. Methods Fluids 2020, 92, 1753–1777. [Google Scholar] [CrossRef]
- Choi, H.; Lee, J. Efficient Use of GPU Memory for Large-Scale Deep Learning Model Training. Appl. Sci. 2021, 11, 10377. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Cao, C. A graphics processing unit-accelerated meshless method for two-dimensional compressible flows. Eng. Appl. Comput. Fluid Mech. 2017, 11, 526–543. [Google Scholar] [CrossRef] [Green Version]
- Tutkun, B.; Edis, F.O. An implementation of the direct-forcing immersed boundary method using GPU power. Eng. Appl. Comput. Fluid Mech. 2016, 11, 15–29. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhao, Y.; Jiang, J.; Zhang, H.J.A.S. A Novel GPU-Based Acceleration Algorithm for a Longwave Radiative Transfer Model. Appl. Sci. 2020, 10, 649. [Google Scholar] [CrossRef] [Green Version]
- Liang, Q.; Xia, X.; Hou, J. Catchment-scale High-resolution Flash Flood Simulation Using the GPU-based Technology. Procedia Eng. 2016, 154, 975–981. [Google Scholar] [CrossRef] [Green Version]
- Meng, W.; Cheng, Y.; Wu, J.; Yang, Z.; Shang, S.; Yang, F. GPU parallel acceleration of transient simulations of open channel and pipe combined flows. IOP Conf. Ser. Earth Environ. Sci. 2019, 240, 052025. [Google Scholar] [CrossRef]
- Darian, H.M.; Esfahanian, V. Assessment of WENO schemes for multi-dimensional Euler equations using GPU. Int. J. Numer. Methods Fluids 2014, 76, 961–981. [Google Scholar] [CrossRef]
- Parna, P.; Meyer, K.; Falconer, R. GPU driven finite difference WENO scheme for real time solution of the shallow water equations. Comput. Fluids 2018, 161, 107–120. [Google Scholar] [CrossRef] [Green Version]
- Toro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Toro, E.F. Shock-Capturing Methods for Free-Surface Shallow Flows; Wiley-Blackwell: Hoboken, NJ, USA, 2001. [Google Scholar]
- Castro, M.; Costa, B.; Don, W.S. High order weighted essentially non-oscillatory WENO-Z schemes for hyperbolic conservation laws. J. Comput. Phys. 2011, 230, 1766–1792. [Google Scholar] [CrossRef]
- Zerroukat, M.; Chris, R.C. A Finite-Difference Algorithm for Multiple Moving Boundary Problems Using Real and Virtual Grid Networks. J. Comput. Phys. 1994, 112, 298–307. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPU Type | Computational Framework | Number of Transistors | Number of Stream Processors | Memory Capacity | Single-Precision Floating-Point | Video Memory Bandwidth |
| NVIDIA GeForce GTX 1660Ti | Pascal | 6 billion 600 million | 1536 | 6000 MB | 4.85 TERAFLOPS | 288(Gb/s) |
| CPU Type | Computational Framework | Basic Frequency | Number of Threads | L3 Cache | Maximum Memory Support | |
|---|---|---|---|---|---|---|
| Intel(R) Core (TM) i7-10700 | Comet Lake-S | 2.90 GHz | 8 threads | 16 MB | 8 GB |
| Pipe Number | Pipe Length/km | Pipe Diameter/m | Roughness | Wave Speed/(m/s) | Initial Flow/(m3/s) |
|---|---|---|---|---|---|
| Pipe 1 | 39.75 | 0.981 | 0.013 | 996 | 0.47 |
| Pipe 2 | 39.75 | 0.981 | 0.013 | 996 | 0.47 |
| Pipe 3 | 99.40 | 1.389 | 0.012 | 1000 | 0.94 |
| Pipe 4 | 59.64 | 0.981 | 0.014 | 994 | 0.47 |
| Pipe 5 | 59.64 | 0.981 | 0.014 | 994 | 0.47 |
| Time Step (t/s) | MOC (t/min) | First-Order Godunov (t/min) | Second-Order Godunov (t/min) | Fifth-Order WENO (t/min) |
|---|---|---|---|---|
| 0.020 | 3.99 | 7.76 | 9.55 | 3.05 |
| 0.015 | 6.72 | 13.47 | 16.75 | 6.34 |
| 0.010 | 16.31 | 28.73 | 36.90 | 14.36 |
| 0.005 | 59.00 | 118.75 | 146.54 | 22.47 |
| Number of Grids | Grid Accuracy/(m) | CPU-WENO (t/s) | GPU-WENO (t/s) | Acceleration Ratio/(Times) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Number of Threads | Number of Threads | |||||||||
| 8 | 16 | 32 | 64 | 8 | 16 | 32 | 64 | |||
| 600 | 400 | 4.44 | 5.22 | 5.21 | 5.19 | 5.22 | 0.85 | 0.85 | 0.86 | 0.85 |
| 6000 | 40 | 48.16 | 11.55 | 6.33 | 5.20 | 5.23 | 4.17 | 7.61 | 9.26 | 9.21 |
| 6 × 104 | 4 | 479.24 | 91.28 | 57.88 | 47.27 | 46.96 | 5.25 | 8.28 | 10.14 | 10.21 |
| 6 × 105 | 0.4 | 4731.08 | 793.81 | 502.24 | 358.96 | 354.39 | 5.96 | 9.42 | 13.18 | 13.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, T.; Li, G. Parallel Accelerated Fifth-Order WENO Scheme-Based Pipeline Transient Flow Solution Model. Appl. Sci. 2022, 12, 7350. https://doi.org/10.3390/app12147350
Mo T, Li G. Parallel Accelerated Fifth-Order WENO Scheme-Based Pipeline Transient Flow Solution Model. Applied Sciences. 2022; 12(14):7350. https://doi.org/10.3390/app12147350
Chicago/Turabian StyleMo, Tiexiang, and Guodong Li. 2022. "Parallel Accelerated Fifth-Order WENO Scheme-Based Pipeline Transient Flow Solution Model" Applied Sciences 12, no. 14: 7350. https://doi.org/10.3390/app12147350
APA StyleMo, T., & Li, G. (2022). Parallel Accelerated Fifth-Order WENO Scheme-Based Pipeline Transient Flow Solution Model. Applied Sciences, 12(14), 7350. https://doi.org/10.3390/app12147350