
Image Interpolation with Regional Gradient Estimation


Abstract
:1. Introduction
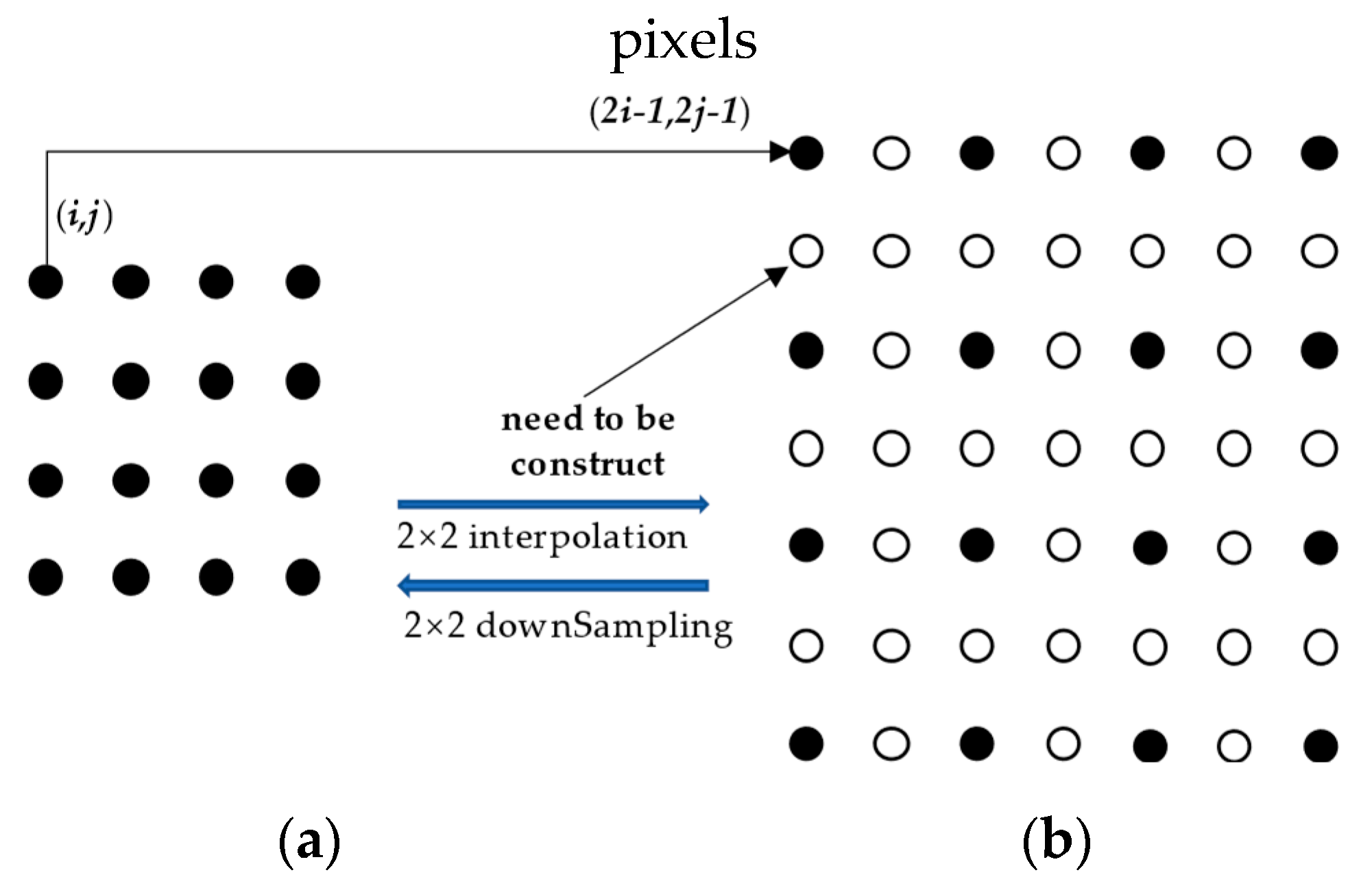
2. Fundamental Issues and Ideas
3. Image Interpolation with Regional Gradient Estimation
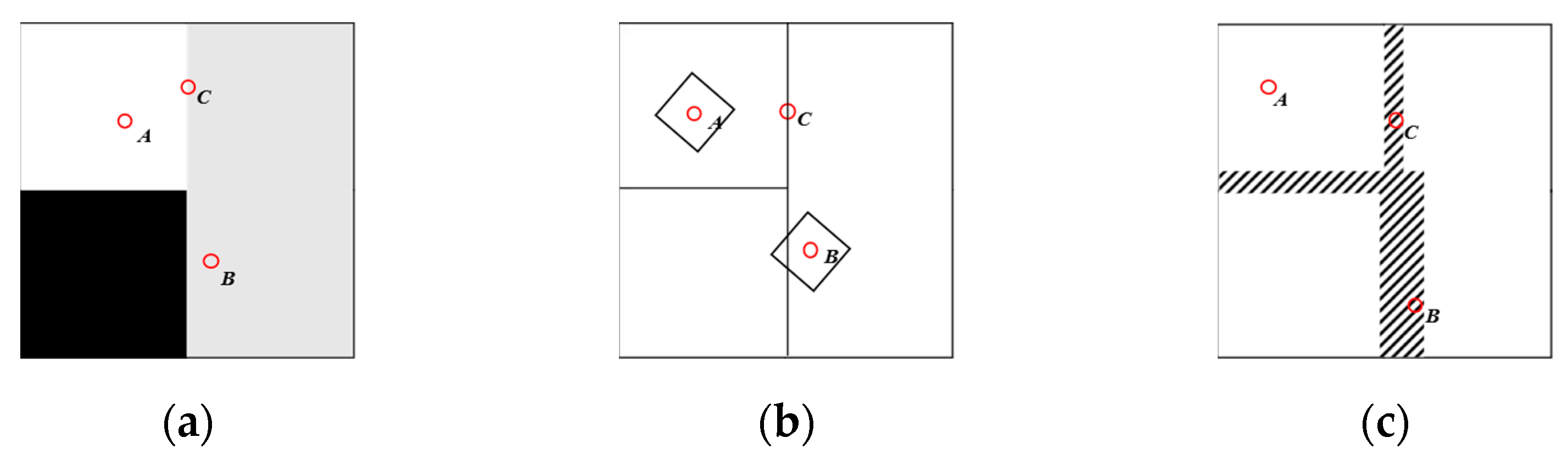
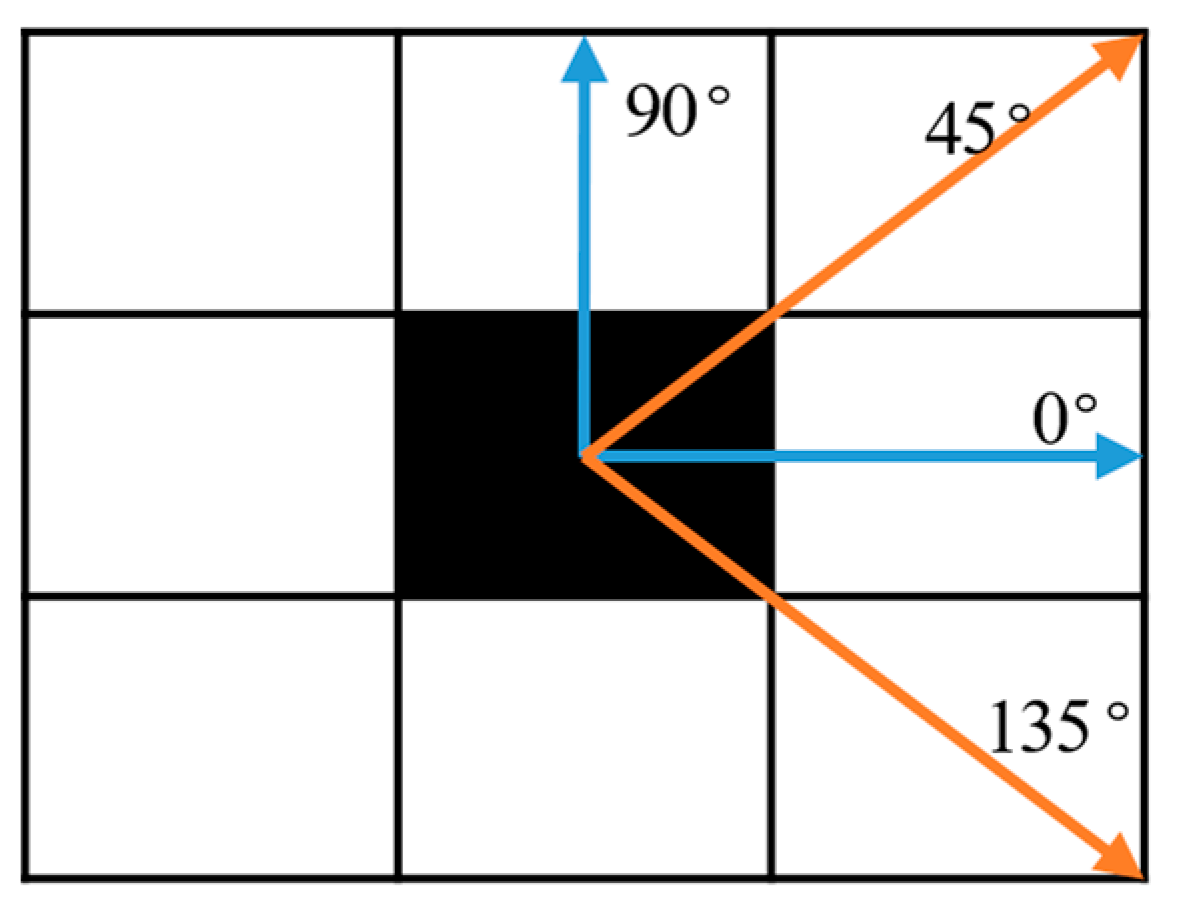
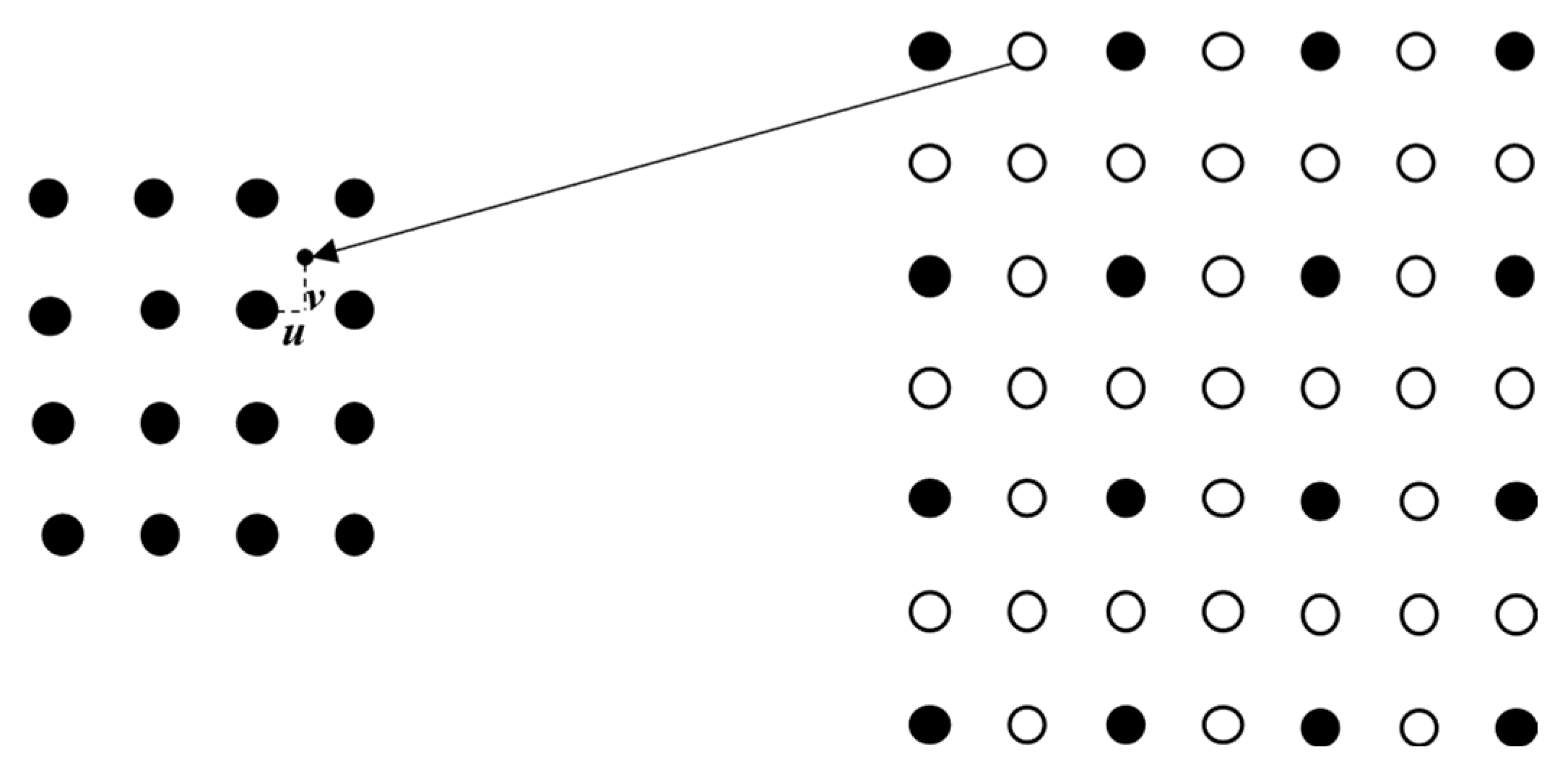
3.1. Regional Gradient Estimation
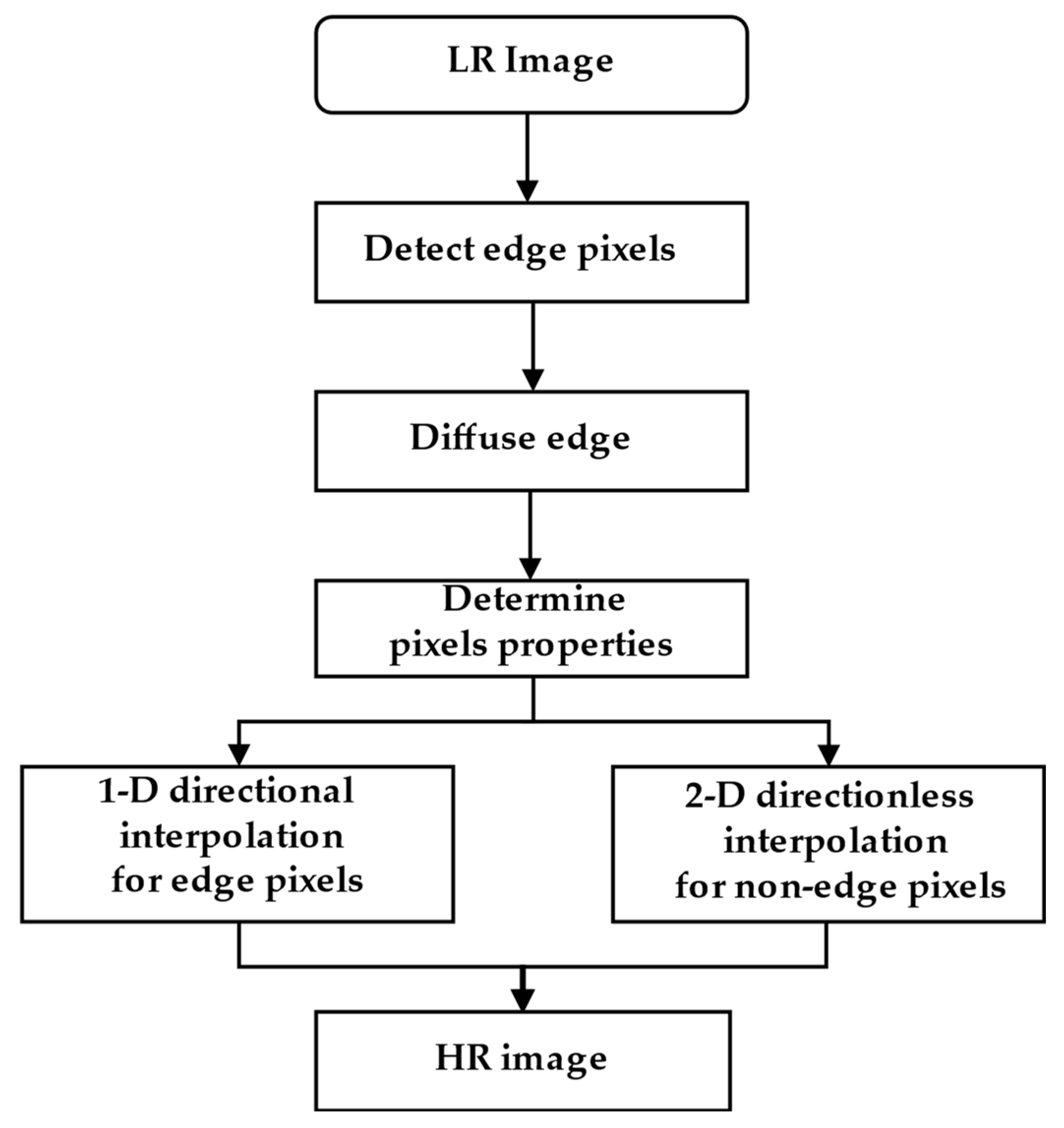
3.2. Image Interpolation
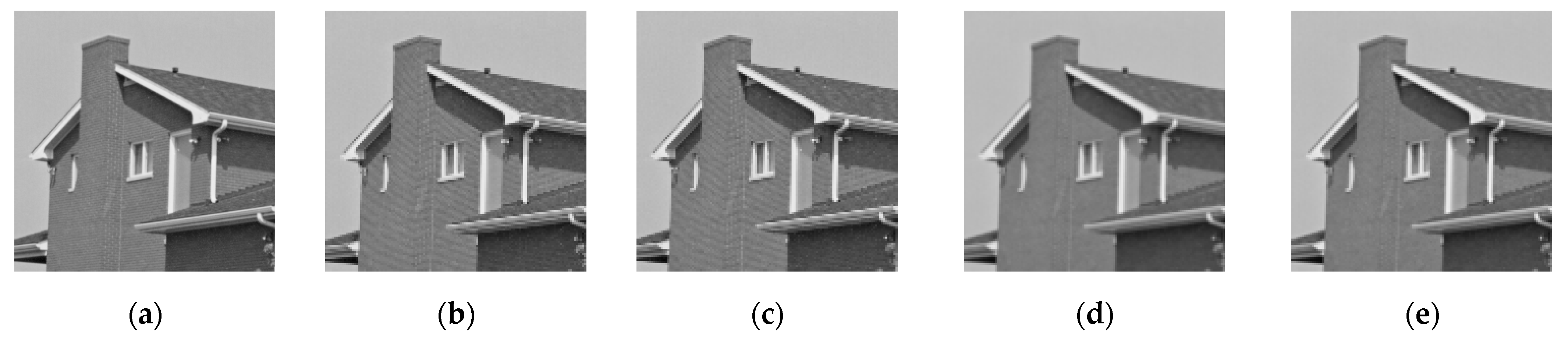
4. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Karwowska, K.; Wierzbicki, D. Using Super-Resolution Methods for Small Satellite Imagery: A Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 3292–3312. [Google Scholar] [CrossRef]
- Prakoso, W.S.; Soesanti, I.; Wibirama, S. Enhancement Methods of Brain MRI Images: A Review. In Proceedings of the 2020 12th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 6–8 October 2020. [Google Scholar]
- Singh, A.; Singh, J. Review and Comparative Analysis of Various Image Interpolation Techniques. In Proceedings of the 2019 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 5–6 July 2019. [Google Scholar]
- Jin, Y.; Zhang, Y.; Cen, Y.G.; LI, Y.D.; Mladenovic, V.; Voronin, V. Pedestrian detection with super-resolution reconstruction for low-quality image. Pattern Recognit. 2021, 115, 107846. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, X.; Tian, Y.; Wang, W.; Xue, J.; Liao, Q. Deep Learning for Single Image Super-Resolution: A Brief Review. IEEE Trans. Multimed. 2019, 21, 3106–3121. [Google Scholar] [CrossRef] [Green Version]
- Barman, T.; Deka, B.; Prasad, A.V.V. GPU-Accelerated Adaptive Dictionary Learning and Sparse Representations for Multispectral Image Super-Resolution. In Proceedings of the 2021 IEEE 18th India Council International Conference (INDICON), Guwahati, India, 19–21 December 2021. [Google Scholar]
- Dong, W.; Zhang, L.; Shi, G. Enhanced Non-Local Total Variation Model and Multi-Directional Feature Prediction Prior for Single Image Super-Resolution. IEEE Trans. Image Process. 2019, 28, 3778–3793. [Google Scholar]
- Shi, J.; Qi, C. Low-rank sparse representation or single image super-resolution via self-similarity learning. In Proceedings of the 23rd IEEE International Conference on Image Processing, Settle, WA, USA, 25–28 September 2016. [Google Scholar]
- Li, J.; Wu, J.; Deng, H.; Liu, J. A self-learning image super-resolution method via sparse representation and non-local similarity. Neurocomputing 2016, 184, 196–206. [Google Scholar] [CrossRef]
- Deng, C.; Xu, J.; Zhang, K.; Tao, D.; Gao, X.; Li, X. Similarity constrains-based structured output regression machine: An approach to image super-resolution. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2472–2485. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Gao, X.; Zhang, K.; Li, J. Single image super-resolution using Gaussian process regression with dictionary-based sampling and Student-t likelihood. IEEE Trans. Image Process. 2017, 26, 3556–3568. [Google Scholar] [CrossRef] [PubMed]
- Mei, D.F.; Zhu, X.; Wang, X.X.; Ai, N. Image super-resolution based on structural dissimilarity learning dictionary. In Proceedings of the 2017 International Conference on the Frontiers and Advances in Data Science (FADS), Xi’an, China, 23–25 October 2017. [Google Scholar]
- Sánchez-García, E.; Balaguer-Beser, Á.; Almonacid-Caballer, J.; Pardo-Pascual, J.E. A New Adaptive Image Interpolation Method to Define the Shoreline at Sub-Pixel Level. Remote Sens. 2019, 11, 1880. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.Y.; Lu, H.C.; Zhang, C.Y. Super-Resolution Method: Based on Wavelet and Interpolation. In Proceedings of the 2020 3rd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 4 December 2020. [Google Scholar]
- Liu, Y.; Huang, Q.J.; Sato, K. Differential filtering method for robot welding seam image enhancement. J. Phys. Conf. Ser. 2020, 1607, 012045. [Google Scholar] [CrossRef]
- Li, Y.M.; Qi, F.F.; Wan, Y. Improvements on Bicubic Image Interpolation. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 February 2020. [Google Scholar]
- Hossain, M.S.; Jalab, H.; Kahtan, H.; Abdullah, A. Image Resolution Enhancement Using Improved Edge Directed Interpolation Method. In Proceedings of the 2019 9th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 29 November–1 December 2019. [Google Scholar]
- Zhe, W.; Ma, K. Contrast-Guided Image Interpolation. IEEE Trans. Image Process. 2013, 22, 4271–4285. [Google Scholar]
- Zhe, W.; Ma, K. Convolutional edge diffusion for fast contrast-guided image interpolation. IEEE Signal Process. Lett. 2016, 23, 1260–1264. [Google Scholar]
- Lu, Z.F.; Zhong, B.J. Image Interpolation with Predicted Gradients. Acta Autom. Sin. 2018, 44, 1072–1085. [Google Scholar]
- Zhong, B.J.; Ma, K.K.; Lu, Z.F. Predictor-corrector image interpolation. J. Vis. Commun. Image Represent. 2019, 61, 50–60. [Google Scholar] [CrossRef]
- Chao, Y.; Ma, C.X.; Shan, W.T.; Feng, J.P.; Zhang, Z.S. Adaptive Directional Cubic Convolution for Integrated Circuit Chip Defect Image Interpolation. Int. J. Circuits Syst. Signal Process. 2021, 15, 1084–1090. [Google Scholar] [CrossRef]
- Gupta, S.; Sharma, D.K.; Ranta, S. A new hybrid image enlargement method using singular value decomposition and cubic spline interpolation. Multimed. Tools Appl. 2022, 81, 4241–4254. [Google Scholar] [CrossRef]
- Ge, R. A Design of Optimized Colour Image Interpolation Method Based on Edge Gradient. In Proceedings of the 2022 International Conference on Big Data, Information and Computer Network (BDICN), Sanya, China, 20–22 January 2022. [Google Scholar]
- Zhao, Y.Y.; Huang, Q.J. Image enhancement of robot welding seam based on wavelet transform and contrast guidance. Int. J. Innov. Comput. Inf. Control 2022, 18, 149–159. [Google Scholar]
- Lama, R.K.; Shin, S.; Kang, M. Interpolation Using Wavelet Transform and Discrete Cosine Transform for High-Resolution Display. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 7–11 January 2016. [Google Scholar]
- Cao, M.; Liu, Z.; Huang, X.; Shen, Z. Research for Face Image Super-Resolution Reconstruction Based on Wavelet Transform and SRGAN. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021. [Google Scholar]
- Ye, H.; Su, K.; Huang, S. Image Enhancement Method Based on Bilinear Interpolating and Wavelet Transform. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021. [Google Scholar]
- Sabilla, I.A.; Meirisdiana, M.; Sunaryono, D.; Husni, M. Best Ratio Size of Image in Steganography Using Portable Document Format with Evaluation RMSE, PSNR, and SSIM. In Proceedings of the 2021 4th International Conference of Computer and Informatics Engineering (IC2IE), Depok, Indonesia, 14–15 September 2021. [Google Scholar]
- Wang, H.P.; Zhou, L.L.; Zhang, J. Region-based Bicubic Image Interpolation Method. Comput. Eng. 2010, 36, 216–218. [Google Scholar]
- Chen, L.M.; Jiang, F.; Zhang, H.F.; Wu, S.B.; Yu, S.D.; Xie, Y.Q. Edge preservation ratio for image sharpness assessment. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Interlaced Row/Column | Nearest | Bilinear | Bicubic |
|---|---|---|---|---|
| PSNR | 31.13 | 27.56 | 26.09 | 25.17 |
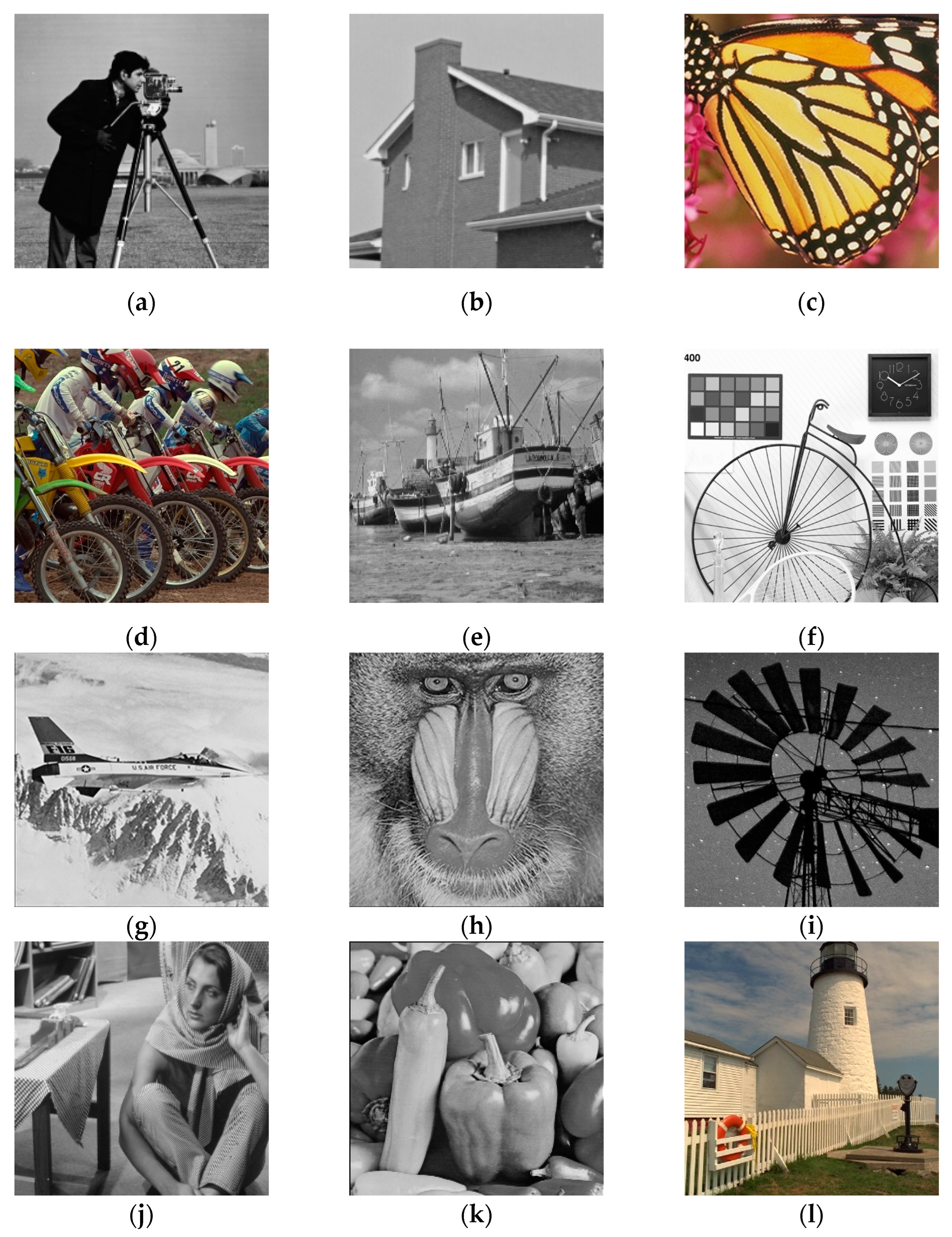
| Test Images | CGI [18] | CED [19] | PCI [20] | IEDI [17] | PGI [21] | WTCGI [25] | IBI [16] | GEI (Proposed) |
|---|---|---|---|---|---|---|---|---|
| Bike | 25.82 | 25.82 | 25.90 | 25.17 | 25.92 | 25.21 | 25.32 | 25.85 |
| Wheel | 21.01 | 20.98 | 21.22 | 20.31 | 20.81 | 20.57 | 21.09 | 21.32 |
| Boats | 29.51 | 29.56 | 29.77 | 29.24 | 29.41 | 29.32 | 29.35 | 29.42 |
| Butterfly | 29.27 | 29.24 | 29.31 | 28.97 | 29.25 | 28.97 | 29.13 | 29.26 |
| House | 32.83 | 32.71 | 32.88 | 32.31 | 32.27 | 31.87 | 32.59 | 32.84 |
| Cameraman | 25.86 | 25.90 | 25.81 | 25.48 | 25.85 | 25.76 | 25.45 | 25.83 |
| Baboon | 22.50 | 22.41 | 22.53 | 22.41 | 22.51 | 22.35 | 22.34 | 22.59 |
| Peppers | 30.88 | 30.77 | 30.87 | 30.47 | 30.79 | 30.19 | 30.65 | 30.81 |
| Fence | 25.70 | 25.63 | 25.84 | 25.61 | 25.76 | 25.69 | 25.49 | 25.75 |
| Airplane | 26.54 | 26.49 | 26.59 | 26.60 | 26.52 | 26.10 | 26.43 | 26.61 |
| Barbara | 23.75 | 23.64 | 23.82 | 23.54 | 23.68 | 23.41 | 23.39 | 24.01 |
| Stars | 34.13 | 33.94 | 34.38 | 33.36 | 34.23 | 33.71 | 33.54 | 34.33 |
| Average | 27.32 | 27.26 | 27.41 | 26.96 | 27.25 | 26.93 | 27.06 | 27.39 |
| Test Images | CGI [18] | CED [19] | PCI [20] | IEDI [17] | PGI [21] | WTCGI [25] | IBI [16] | GEI (Proposed) |
|---|---|---|---|---|---|---|---|---|
| Bike | 0.8808 | 0.8812 | 0.8803 | 0.8751 | 0.8785 | 0.8791 | 0.8783 | 0.8798 |
| Wheel | 0.8621 | 0.8626 | 0.8668 | 0.8644 | 0.8632 | 0.8649 | 0.8654 | 0.8665 |
| Boats | 0.8763 | 0.8801 | 0.8794 | 0.8771 | 0.8812 | 0.8744 | 0.8791 | 0.8796 |
| Butterfly | 0.9721 | 0.9732 | 0.9720 | 0.9718 | 0.9725 | 0.9698 | 0.9708 | 0.9758 |
| House | 0.8781 | 0.8778 | 0.8789 | 0.8783 | 0.8779 | 0.8775 | 0.8766 | 0.8780 |
| Cameraman | 0.8711 | 0.8732 | 0.8715 | 0.8704 | 0.8710 | 0.8692 | 0.8702 | 0.8732 |
| Baboon | 0.9125 | 0.9111 | 0.9130 | 0.9121 | 0.9174 | 0.9112 | 0.9114 | 0.9165 |
| Peppers | 0.9032 | 0.9041 | 0.9035 | 0.9029 | 0.8912 | 0.9026 | 0.9026 | 0.9025 |
| Fence | 0.7752 | 0.7780 | 0.7785 | 0.7763 | 0.7757 | 0.7765 | 0.7782 | 0.7723 |
| Airplane | 0.9405 | 0.9410 | 0.9401 | 0.9389 | 0.9438 | 0.9422 | 0.9409 | 0.9412 |
| Barbara | 0.9125 | 0.9128 | 0.9130 | 0.9114 | 0.9119 | 0.9105 | 0.9126 | 0.9118 |
| Stars | 0.9584 | 0.9603 | 0.9617 | 0.9608 | 0.9605 | 0.9610 | 0.9589 | 0.9608 |
| Average | 0.8952 | 0.8963 | 0.8966 | 0.8950 | 0.8954 | 0.8949 | 0.8954 | 0.8965 |
| Test Images | CGI [18] | CED [19] | PCI [20] | IEDI [17] | PGI [21] | WTCGI [25] | IBI [16] | GEI (Proposed) |
|---|---|---|---|---|---|---|---|---|
| Bike | 0.8258 | 0.8243 | 0.8325 | 0.8274 | 0.8313 | 0.8265 | 0.8236 | 0.8302 |
| Wheel | 0.8186 | 0.8189 | 0.8295 | 0.8111 | 0.8256 | 0.8274 | 0.8121 | 0.8259 |
| Boats | 0.7963 | 0.7865 | 0.7911 | 0.7895 | 0.7901 | 0.7898 | 0.7883 | 0.7916 |
| Butterfly | 0.8729 | 0.8775 | 0.8721 | 0.8703 | 0.8705 | 0.8749 | 0.8612 | 0.8753 |
| House | 0.7541 | 0.7533 | 0.7611 | 0.7615 | 0.7605 | 0.7596 | 0.7566 | 0.7624 |
| Cameraman | 0.7554 | 0.7525 | 0.7544 | 0.7494 | 0.7540 | 0.7556 | 0.7502 | 0.7601 |
| Baboon | 0.8029 | 0.8035 | 0.8051 | 0.8046 | 0.8069 | 0.8015 | 0.8014 | 0.8072 |
| Peppers | 0.7657 | 0.7654 | 0.7682 | 0.7625 | 0.7680 | 0.7652 | 0.7726 | 0.7677 |
| Fence | 0.7098 | 0.7085 | 0.7121 | 0.7074 | 0.7112 | 0.7098 | 0.7012 | 0.7091 |
| AirPlane | 0.8109 | 0.8112 | 0.8225 | 0.8112 | 0.8235 | 0.8165 | 0.8119 | 0.8254 |
| Barbara | 0.7450 | 0.7465 | 0.7519 | 0.7485 | 0.7515 | 0.7501 | 0.7526 | 0.7535 |
| Stars | 0.7983 | 0.7990 | 0.8013 | 0.7996 | 0.8012 | 0.8056 | 0.7989 | 0.8026 |
| Average | 0.7892 | 0.7873 | 0.7918 | 0.7869 | 0.7912 | 0.7902 | 0.7859 | 0.7926 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Z.; Huang, Q. Image Interpolation with Regional Gradient Estimation. Appl. Sci. 2022, 12, 7359. https://doi.org/10.3390/app12157359
Jia Z, Huang Q. Image Interpolation with Regional Gradient Estimation. Applied Sciences. 2022; 12(15):7359. https://doi.org/10.3390/app12157359
Chicago/Turabian StyleJia, Zuhang, and Qingjiu Huang. 2022. "Image Interpolation with Regional Gradient Estimation" Applied Sciences 12, no. 15: 7359. https://doi.org/10.3390/app12157359
APA StyleJia, Z., & Huang, Q. (2022). Image Interpolation with Regional Gradient Estimation. Applied Sciences, 12(15), 7359. https://doi.org/10.3390/app12157359