
Evacuation Management System for Major Disasters


Abstract
:1. Introduction
2. Mathematical Model
- A disaster is denoted as where is the number of active hazards at the same time.
- . is the set of active evacuations taking place during the disaster .
- is the set of damaged assets or impassable areas resulting from the disaster .
- Elements contained in and are also defined as a set of geographical coordinates where is the number or coordinates used to define the evacuation/damaged area.
2.1. Evacuation Routing
- where . represents all feasible shelters for which the distance to an geographical boundary ranges in , where is the maximum distance.
- is a systematic uniform random (UR) generated on the circumference with radius , ensuring properly distributed locations.
- , where the function is the minimum distance between a shelter geographical location and the damaged asset or alternative evacuation geographical boundary (Figure 2).
2.2. Evacuation Time Estimation
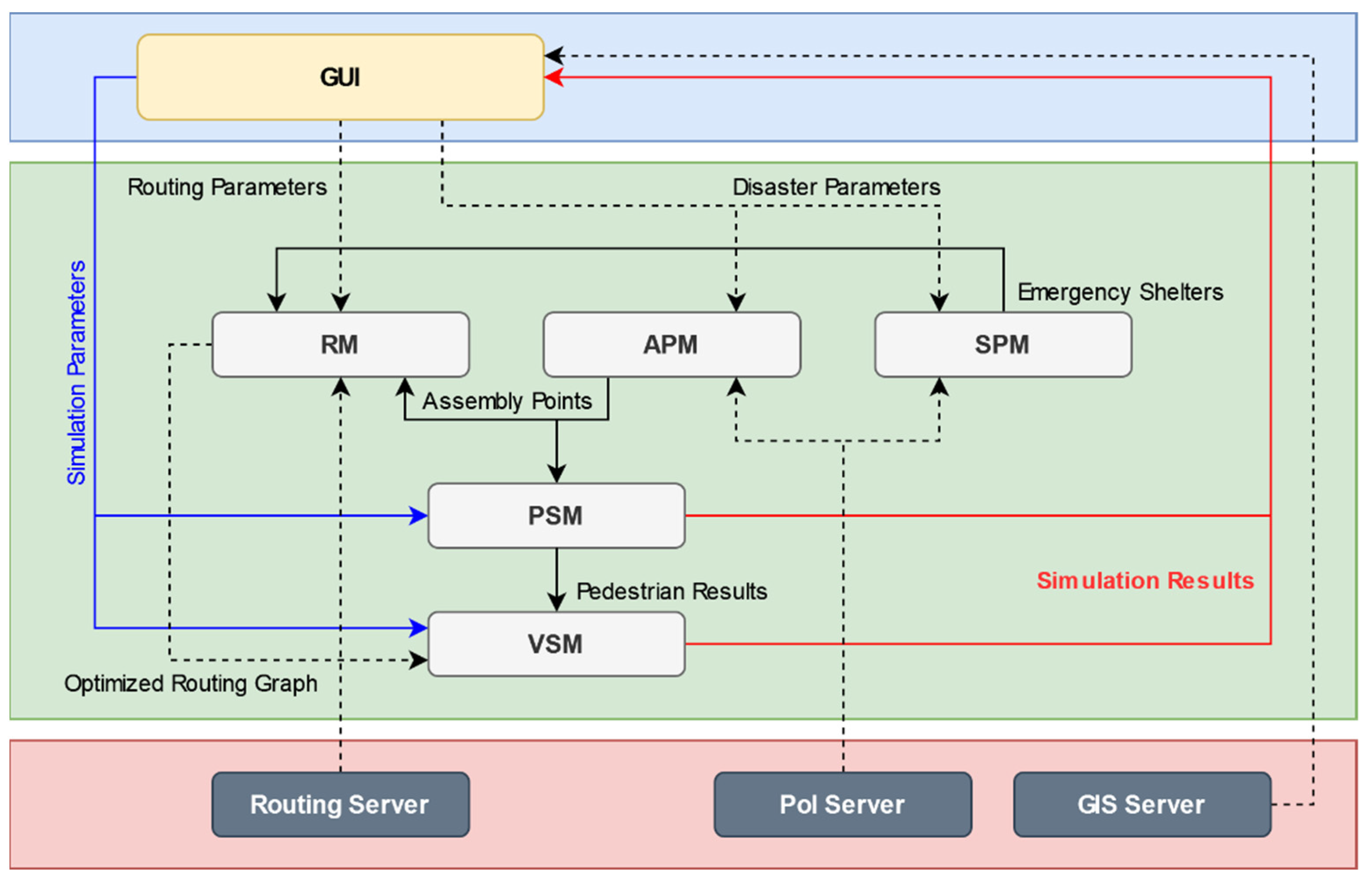
3. EMS Platform
- Graphical User Interface (GUI): It allows the user/operator to manage the active evacuations via the Geographical Information System (GIS), providing an intuitive and visual interface that shows the real-time status of the evacuation process. The user/operator can modify/update the situation and re-simulate the evacuation to explore alternative strategies.
- Assembly Points Model (APM): This model processes the GIS information of the selected evacuation area (e.g., neighbourhood, urban area, village, town, etc.) and generates a set of assembly points by considering the population distribution, the points of interest/reference within the evacuation area, and the distances pedestrians are likely to cover by foot [23].
- Shelter Points Model (SPM): This model takes active evacuations as the input, damaged assets, and the spatiotemporal evolution of the hazard (e.g., toxic plumes) to provide a set of feasible shelters located at the required distance, far from dangerous areas. It should be noted that the user/operator can assign other shelters as destination points of the evacuation.
- Routing Model (RM): This model uses a local dedicated service to provide a routing plan by ensuring a uniform allocation of evacuees in the shelters. In addition, this model deals with the likely interactions between routes (i.e., road section used by more than a route or distribution of vehicles in an intersection).
- Pedestrian Simulation Model (PSM): This model simulates both the decision to respond and the movement on foot of pedestrians at the local/individual level. The main output is the number of individuals entering the vehicular model over time at a given assembly point.
- Vehicular Simulation Model (VSM): This model simulates the vehicular stage in the evacuation process in order to obtain estimated route parameters (i.e., traffic density or average speed) and the number of vehicles/individuals evacuated to a given shelter over time.
4. Case Study
- ○
- Req. 1: The system proposes reasonable and realistic assembly points and shelters, and the routing algorithm provides optimal routes for evacuation purposes.
- ○
- Req. 2: The pedestrian and vehicular evacuation models provide reliable predictions modelling vehicular and pedestrian behaviours and interactions.
- ○
- Req. 3: The system operates successfully for multiple evacuation areas and large-scale evacuations at the same time.
4.1. Gran Canaria Wildland-Urban Interface Evacuation
4.2. Results
5. Discussion & Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IFRC. World Disasters Report 2020; IFRC: New Delhi, India, 2020. [Google Scholar]
- ETR. Ecological Threat Register Report of 2020; Institute for Economics & Peace: Sydney, Australia, 2020. [Google Scholar]
- Alexander, D. Natural Disasters; Routledge: London, UK, 2018. [Google Scholar]
- Bryant, E. Natural Hazards; Routledge: London, UK, 2004. [Google Scholar]
- Montz, B.E.; Tobin, G.A.; Hagelman, R.R. Natural Hazards: Explanation and Integration; Guilford Publications: New York, NY, USA, 2017. [Google Scholar]
- Liu, Q.; Qin, Y.; Li, G.; Liu, Z.; Cheng, D.; Zhao, Y. Real-time simulation of large-scale floods. IOP Conf. Ser. Earth Environ. Sci. 2016, 39, 012050. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q.; Razi, A.; Afghah, F.; Fule, P. Wildfire spread modeling with aerial image processing. In Proceedings of the 2020 IEEE 21st International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Virtual Conference, August 31–3 September 2020; pp. 335–340. [Google Scholar]
- Gude, V.; Corns, S.; Dagli, C.; Long, S. Agent Based Modeling for Flood Inundation Mapping and Rerouting. Procedia Comput. Sci. 2020, 168, 170–176. [Google Scholar] [CrossRef]
- Bayram, V. Optimization models for large scale network evacuation planning and management: A literature review. Surv. Oper. Res. Manag. Sci. 2016, 21, 63–84. [Google Scholar] [CrossRef]
- Hardy, M.; Wunderlich, K. Evacuation Management Operations (EMO) Modeling Assessment; Research and Innovative Technology Administration, ITS Joint Program Office: Washington, DC, USA, 2007. [Google Scholar]
- Moriarty, K.D.; Ni, D.; Collura, J. Modeling traffic flow under emergency evacuation situations: Current practice and future directions. In Proceedings of the Transportation Research Board 2007 Annual Meeting, Washington, DC, USA, 21–25 January 2007. [Google Scholar]
- Ronchi, E.; Gwynne, S.M.; Rein, G.; Wadhwani, R.; Intini, P.; Bergstedt, A. e-Sanctuary: Open Multi-Physics Framework for Modelling Wildfire Urban Evacuation; Fire Protection Research Foundation Quincy: Quincy, MA, USA, 2017. [Google Scholar]
- Hardy, M.; Wunderlich, K.; Bunch, J. Structuring Modeling and Simulation Analysis for Evacuation Planning and Operations; Intelligent Transportation Systems Joint Program Office: Washington, DC, USA, 2009. [Google Scholar]
- Bergstedt, A. A review of traffic models for wildland-urban interface wildfire evacuation. In LUTVDG/TVBB; Lund University: Lund, Sweden, 2018. [Google Scholar]
- Rossetti, M.D.; Ni, Q. Simulating large-scale evacuation scenarios in commercial shopping districts-methodologies and case study. In Proceedings of the 2010 Winter Simulation Conference, Baltimore, MD, USA, 5–8 December 2010; pp. 3494–3505. [Google Scholar]
- Zhan, F.B.; Chen, X. Agent-based modeling and evacuation planning. In Geospatial Technologies and Homeland Security; Springer: Berlin/Heidelberg, Germany, 2008; pp. 189–208. [Google Scholar]
- Ronchi, E.; Wahlqvist, J.; Gwynne, S.; Kinateder, M.; Benichou, N.; Ma, C.; Rein, G.; Mitchell, H.; Kimball, A. WUI-NITY: A Platform for the Simulation of Wildland-Urban Interface Fire Evacuation; Fire Protection Research Foundation: Quincy, MA, USA, 2020; p. 80. [Google Scholar]
- Zhou, L.; Wu, X.; Xu, Z.; Fujita, H. Emergency decision making for natural disasters: An overview. Int. J. Disaster Risk Reduct. 2018, 27, 567–576. [Google Scholar] [CrossRef]
- Wallace, W.A.; de Balogh, F. Decision support systems for disaster management. Public Adm. Rev. 1985, 45, 134–146. [Google Scholar] [CrossRef]
- Bashawri, A.; Garrity, S.; Moodley, K. An overview of the design of disaster relief shelters. Procedia Econ. Financ. 2014, 18, 924–931. [Google Scholar] [CrossRef] [Green Version]
- Shelter-Centre. Transitional Shelter Guidelines; International Organization for Migration: New York, NY, USA, 2012. [Google Scholar]
- Huang, Y.; Yin, Z.; Chu, H. Suitability Assessment of Emergency Shelters Based on GIS: A Case Study in Urban Function Optimization Area of Shanghai. IOP Conf. Ser. Earth Environ. Sci. 2019, 234, 1–7. [Google Scholar] [CrossRef]
- Boonmee, C.; Arimura, M.; Asada, T. Facility location optimization model for emergency humanitarian logistics. Int. J. Disaster Risk Reduct. 2017, 24, 485–498. [Google Scholar] [CrossRef]
- Dong, H.; Zhou, M.; Wang, Q.; Yang, X.; Wang, F.-Y. State-of-the-art pedestrian and evacuation dynamics. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1849–1866. [Google Scholar] [CrossRef]
- Kouskoulis, G.; Antoniou, C. Systematic review of pedestrian simulation models with a focus on emergency situations. Transp. Res. Rec. 2017, 2604, 111–119. [Google Scholar] [CrossRef]
- Capote, J.A.; Alvear, D.; Abreu, O.; Cuesta, A.; Alonso, V. A stochastic approach for simulating human behaviour during evacuation process in passenger trains. Fire Technol. 2012, 48, 911–925. [Google Scholar] [CrossRef]
- Alvear, D.; Abreu, O.; Cuesta, A.; Alonso, V. A new method for assessing the application of deterministic or stochastic modelling approach in evacuation scenarios. Fire Saf. J. 2014, 65, 11–18. [Google Scholar] [CrossRef]
- Kaisar, E.; Parr, S. Traffic Simulation Modeling for an Urban Chemical Disaster: Emergency Evacuation Development and Case Study. Lat. Am. Caribb. J. Eng. Educ. 2012, 6, 10–17. [Google Scholar]
- Chandra, S.; Bharti, A.K. Speed distribution curves for pedestrians during walking and crossing. Procedia-Soc. Behav. Sci. 2013, 104, 660–667. [Google Scholar] [CrossRef] [Green Version]
- Purser, D.A.; Bensilum, M. Quantification of behaviour for engineering design standards and escape time calculations. Saf. Sci. 2001, 38, 157–182. [Google Scholar] [CrossRef]
- Lovreglio, R.; Kuligowski, E.; Gwynne, S.; Boyce, K. A pre-evacuation database for use in egress simulations. Fire Saf. J. 2019, 105, 107–128. [Google Scholar] [CrossRef]
- Azlan, N.N.N.; Rohani, M.M. Overview of application of traffic simulation model. MATEC Web Conf. 2018, 150, 03006. [Google Scholar] [CrossRef] [Green Version]
- Notley, S.O.; Bourne, N.; Taylor, N.B. Speed, Flow and Density of Motorway Traffic; Transport Research Laboratory: Wokingham, UK, 2009. [Google Scholar]
- EUMETSAT. Gran Canaria Wildfires. Available online: https://www.eumetsat.int/gran-canaria-wildfires (accessed on 17 August 2019).
- BBC. Gran Canaria: 9000 Flee ‘Unprecedented’ Wildfires on Holiday Island. Available online: https://www.bbc.com/news/world-europe-49388823 (accessed on 17 August 2019).
- Chen, J.; Yu, J.; Wen, J.; Zhang, C.; Yin, Z.; Wu, J.; Yao, S. Pre-evacuation time estimation based emergency evacuation simulation in urban residential communities. Int. J. Environ. Res. Public Health 2019, 16, 4599. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- UN/ECLAC. Handbook for Disaster Assessment; United Nations: Santiago de Chile, Chile, 2014. [Google Scholar]
- Turban, E. Decision Support and Expert Systems Management Support Systems; Prentice-Hall, Inc.: Hillsdale, NJ, USA, 1995. [Google Scholar]
- Battegazzorre, E.; Bottino, A.; Domaneschi, M.; Cimellaro, G.P. IdealCity: A hybrid approach to seismic evacuation modeling. Adv. Eng. Softw. 2021, 153, 102956. [Google Scholar] [CrossRef]
- Amideo, A.E.; Scaparra, M.P.; Kotiadis, K. Optimising shelter location and evacuation routing operations: The critical issues. Eur. J. Oper. Res. 2019, 279, 279–295. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Var | Distribution | Details |
|---|---|---|
| Uniform. | [Lng] [Lat] | |
| Normal. | ||
| Log-Normal | ||
| Municipality | Evacuation Start Date | Urban Area | Evacuees | Shelter Location | Shelter Building |
|---|---|---|---|---|---|
| Agaete | 18 August 2019 | El Risco | 1000 | Agaete | Alberto Álamo sports centre |
| El Valle Norte | |||||
| El Valle Centro | |||||
| El Valle Sur | |||||
| Artenara | 10 August 2019 | Artenara | 800 | La Aldea de San Nicolás | Rest home |
| Las Cuevas | |||||
| Las Arbejas | |||||
| 11 August 2019 | Acusa Verde | 245 | Hostel | ||
| Coruña | |||||
| Candelaria | |||||
| Lugarejos | |||||
| Santa María de Guía | 17 August 2019 | Barranco del Pinar | 100 | Santa María de Guía | Miguel Santiago school residence |
| Marente |
| Evacuation | Evacuees | Routes/Interaction Road Sections | Simulation Time |
|---|---|---|---|
| Artenara 10/08 | 800 | 6/14 | 2 min, 51 s |
| Artenara 11/08 | 245 | 8/21 | 3 min, 51 s |
| Santa María de Guia 17/08 | 100 | 2/4 | 0 min, 4 s |
| Agaete 18/08 | 1000 | 4/11 | 0 min, 9 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Villa, J.; Cuesta, A.; Alvear, D.; Balboa, A. Evacuation Management System for Major Disasters. Appl. Sci. 2022, 12, 7876. https://doi.org/10.3390/app12157876
González-Villa J, Cuesta A, Alvear D, Balboa A. Evacuation Management System for Major Disasters. Applied Sciences. 2022; 12(15):7876. https://doi.org/10.3390/app12157876
Chicago/Turabian StyleGonzález-Villa, Javier, Arturo Cuesta, Daniel Alvear, and Adriana Balboa. 2022. "Evacuation Management System for Major Disasters" Applied Sciences 12, no. 15: 7876. https://doi.org/10.3390/app12157876
APA StyleGonzález-Villa, J., Cuesta, A., Alvear, D., & Balboa, A. (2022). Evacuation Management System for Major Disasters. Applied Sciences, 12(15), 7876. https://doi.org/10.3390/app12157876