
Motion Generation for Crane Simulators Using Streamlined Motion Blending Technology


Abstract
:1. Introduction
2. Motion Generation Technology for Crane Simulator
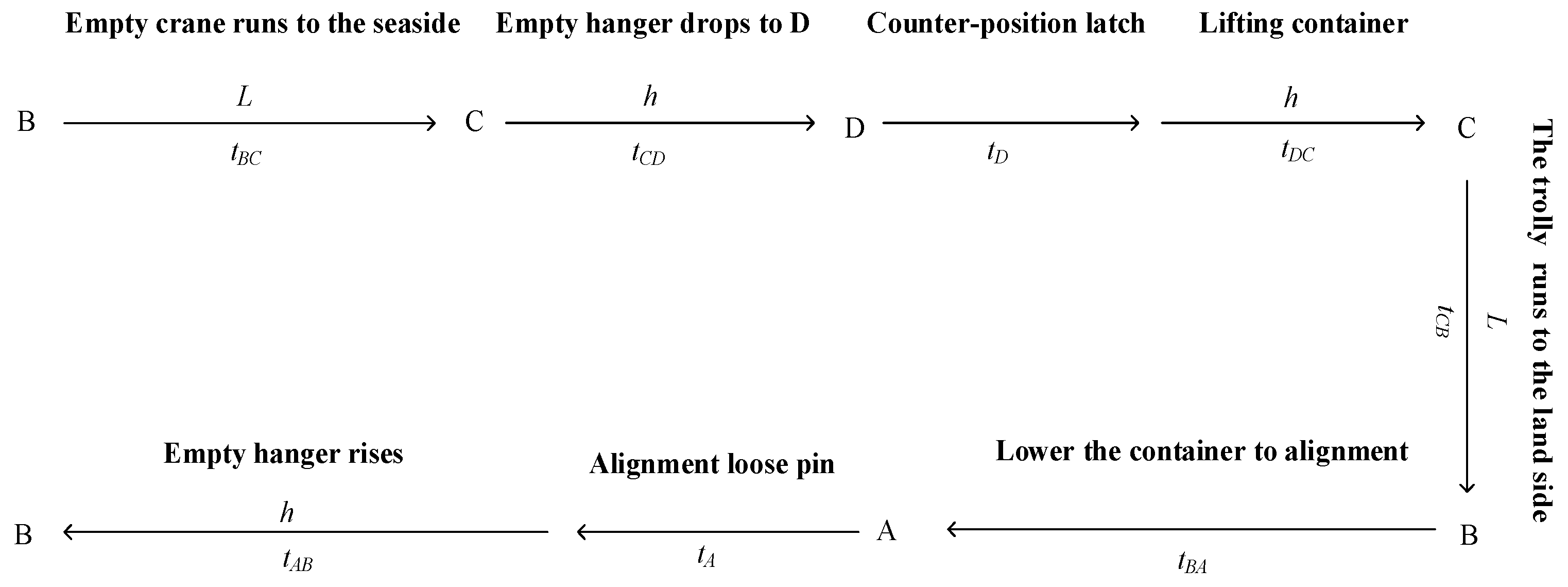
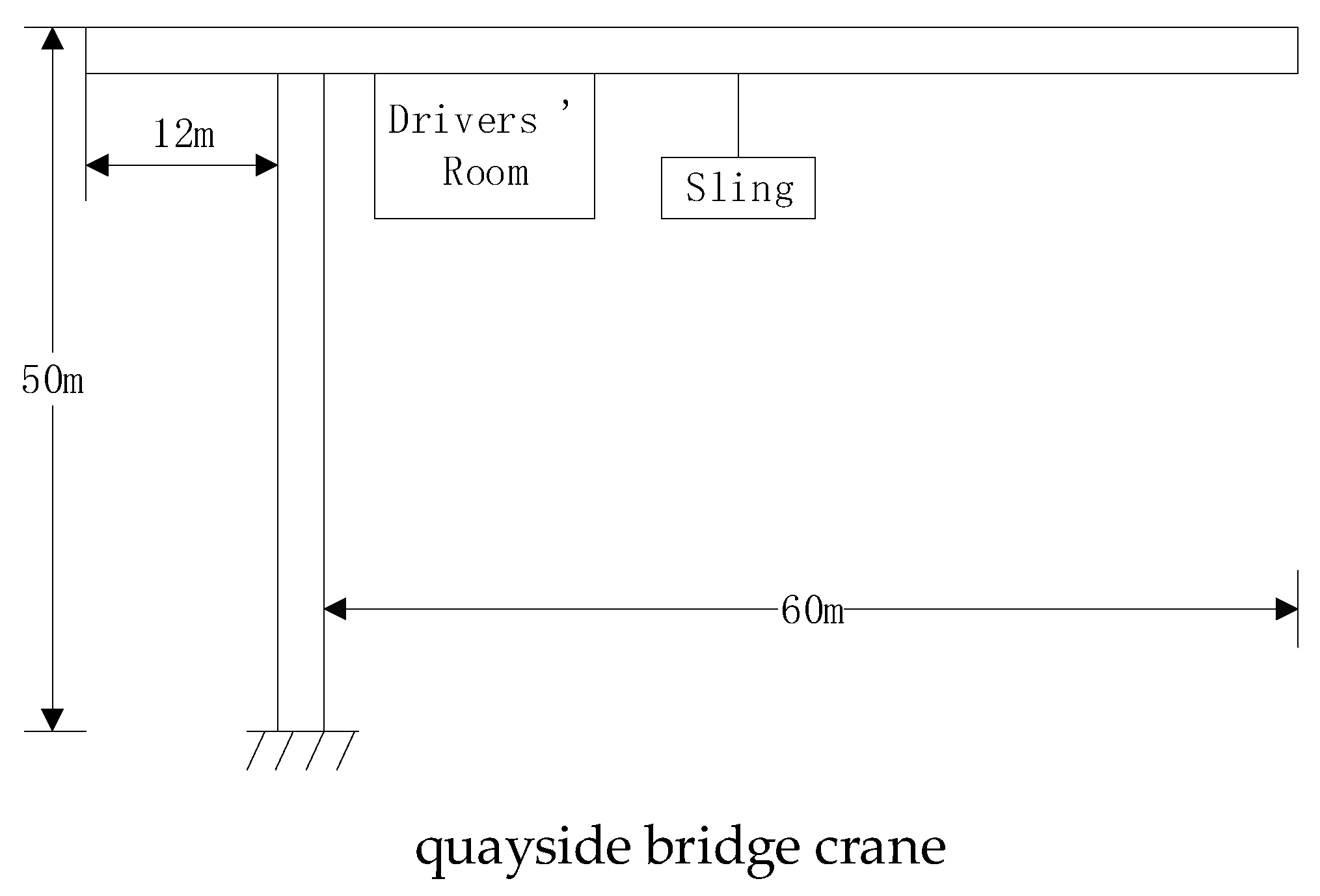
2.1. The Characteristics of Crane Motion
2.1.1. Periodicity
2.1.2. Motion Decomposability
2.1.3. Predictability
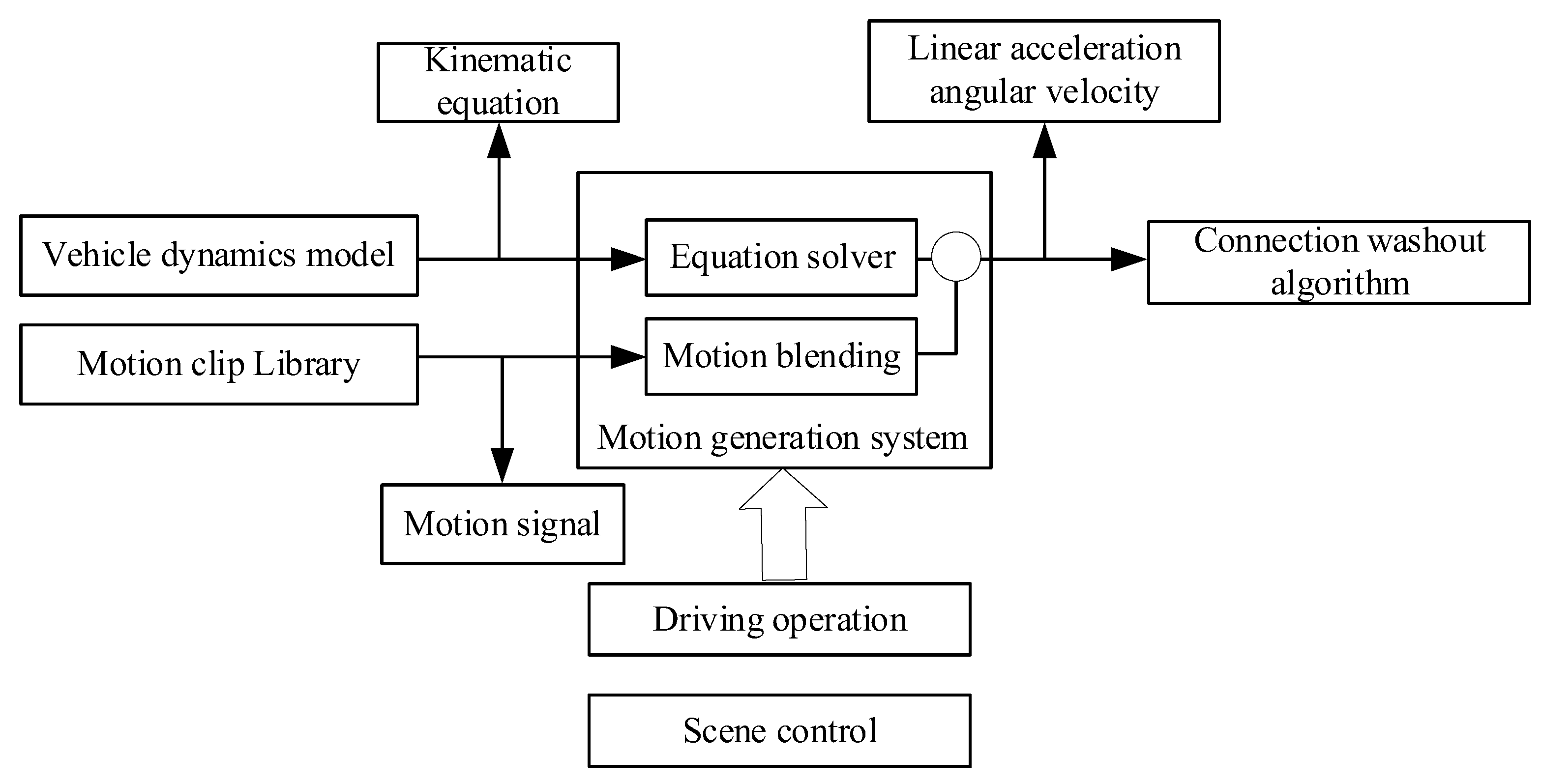
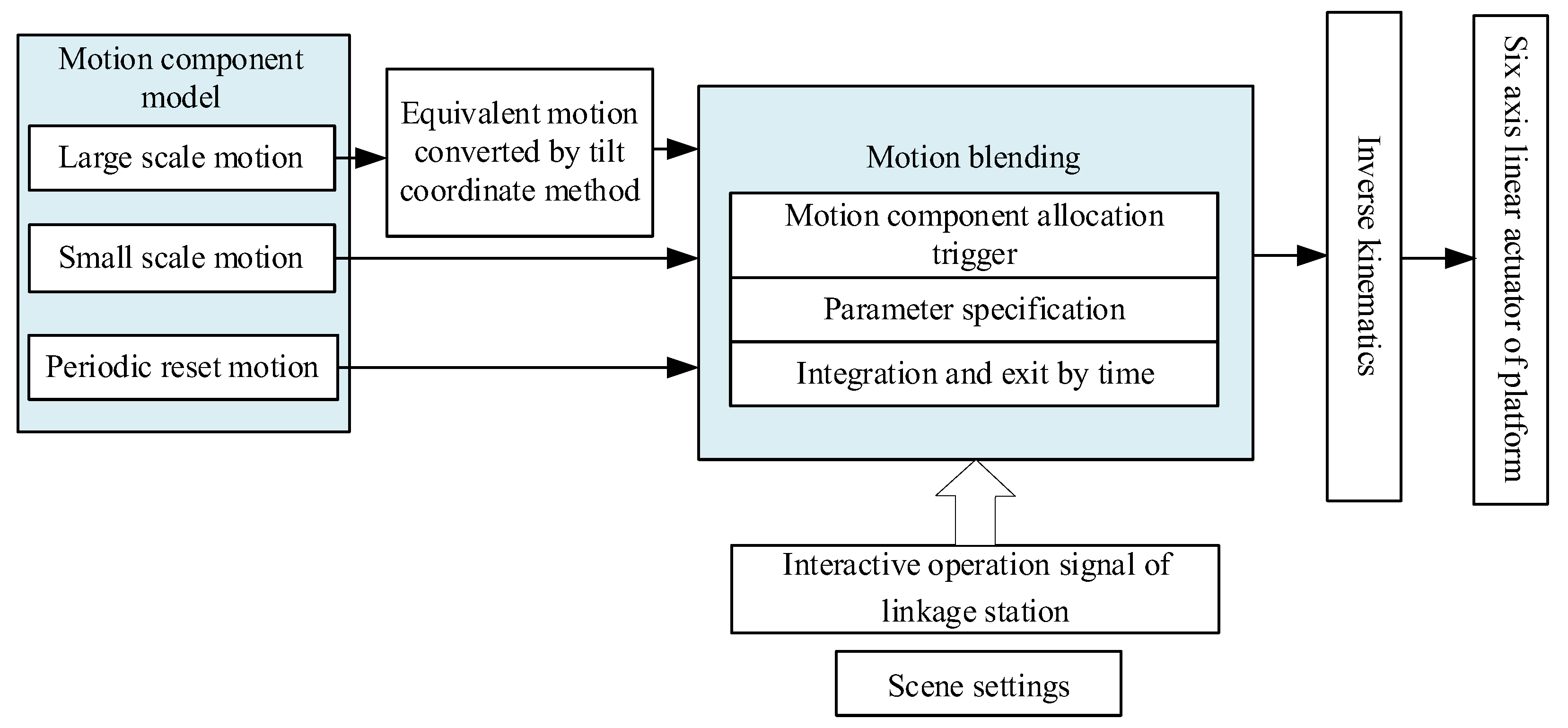
2.2. Motion Generation Based on Motion Blending Technology
3. Streamlined Motion Blending Technology for Crane Motion Simulation
3.1. Analysis of Streamlined Motion Blending Technology
3.2. Structure of Streamlined Motion Blending Algorithm
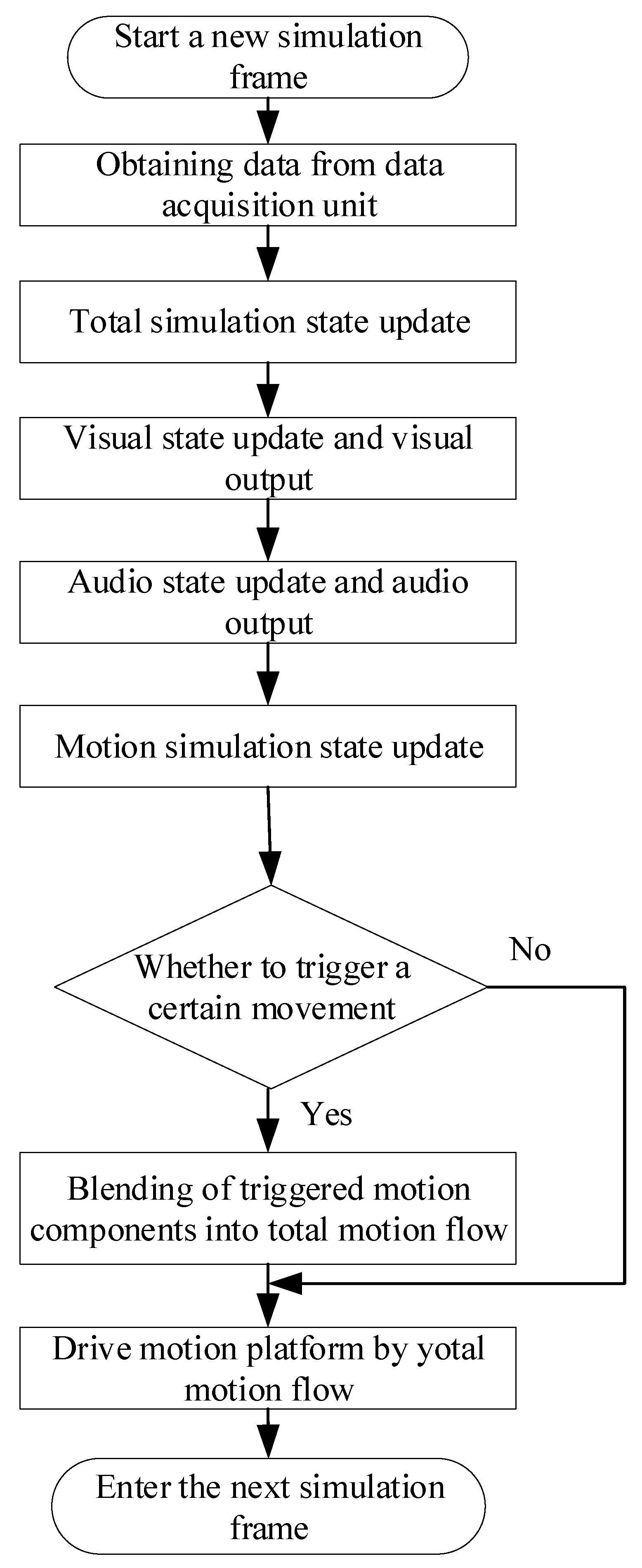
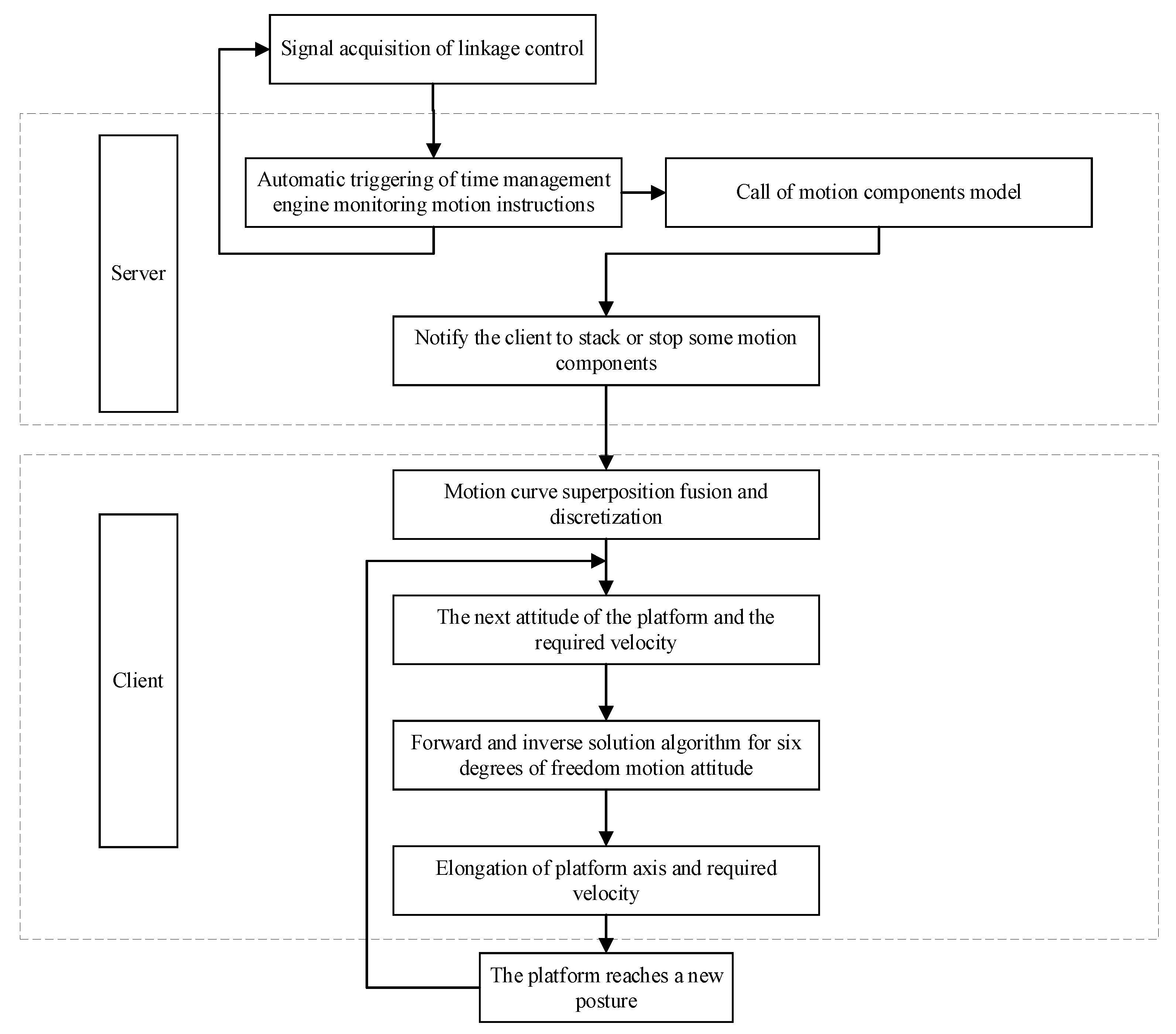
3.2.1. Flow Chart of Streamlined Motion Blending
3.2.2. Calling Method of Motion Components
3.2.3. Streamlined Motion Blending Algorithm Pseudocode
| Algorithm 1. Streamlined Motion Blending Algorithm |
|
Start a new time frame; # Start a new simulation frame Read data from the DAQ Unit; # Read data from data acquisition unit Renew the status of the simulated crane; # Total simulation state update {Renew rendering status; # Visual state update Render;} # Visual output {Renew audio output status; # Audio state update Output audio;} # Audio output {Renew motion cueing status; # Motion simulation state update Do case; # The following is the main algorithm of motion simulation case IsCase1=TRUE; AddLayer(A1[], b1); case IsCase2=TRUE; AddLayer(A2[], b2); case IsCase3=TRUE; AddLayer(A3[], b3); case IsCase4=TRUE; AddLayer(A4[], b4); case IsCase5=TRUE; AddLayer(A5[], b5); case IsCase6=TRUE; AddLayer(A6[], b6); case IsCase7=TRUE; AddLayer(A7[], b7); case IsCase8=TRUE; AddLayer(A8[], b8); case IsCase9=TRUE; AddLayer(A9[], b9); case IsCase10=TRUE; ResetPlatform; Endcase;} If TimeIsUp=FALSE; Then Nooperation; Else Return; # Time to this frame, return to the next frame |
4. Modeling of Typical Motion Components
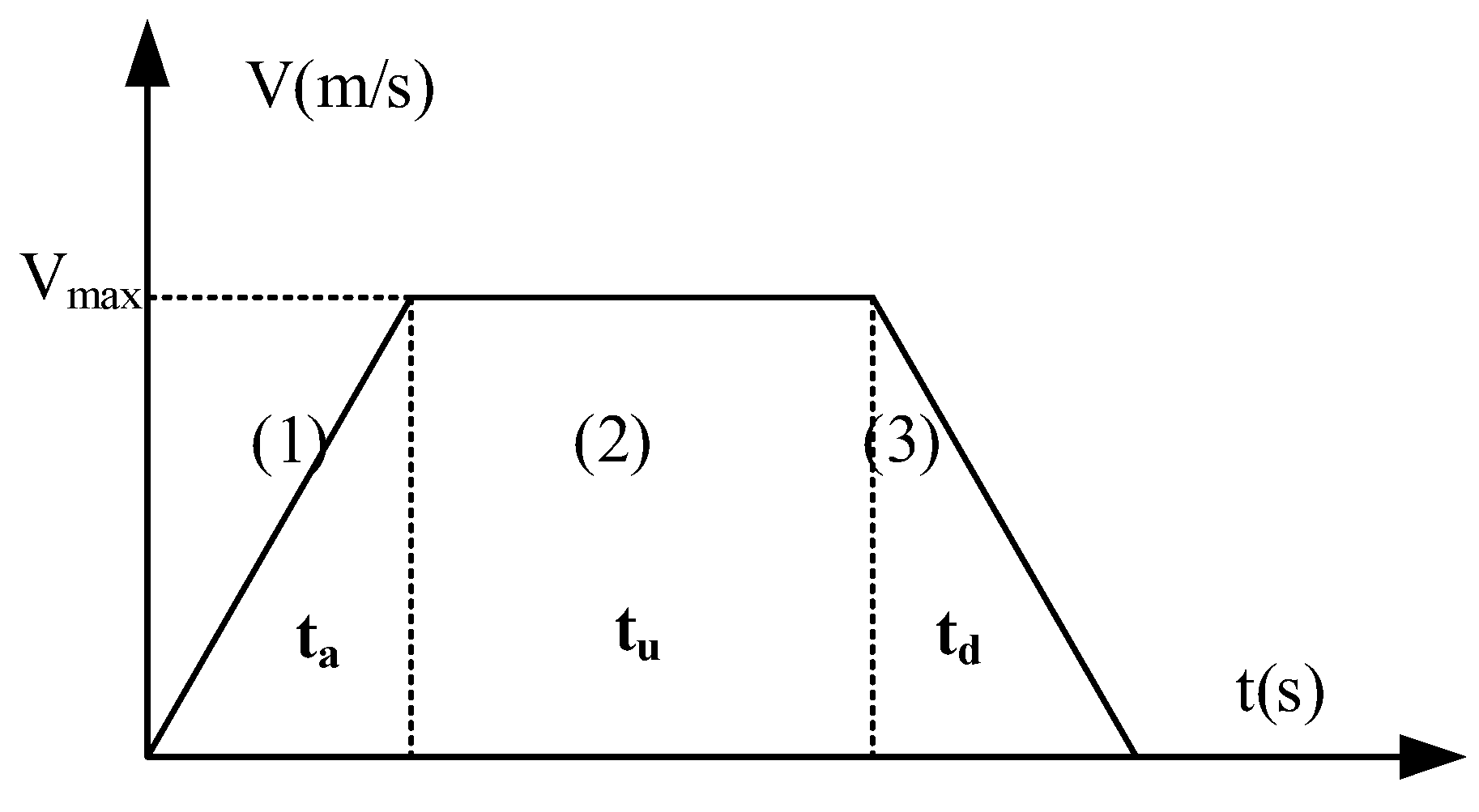
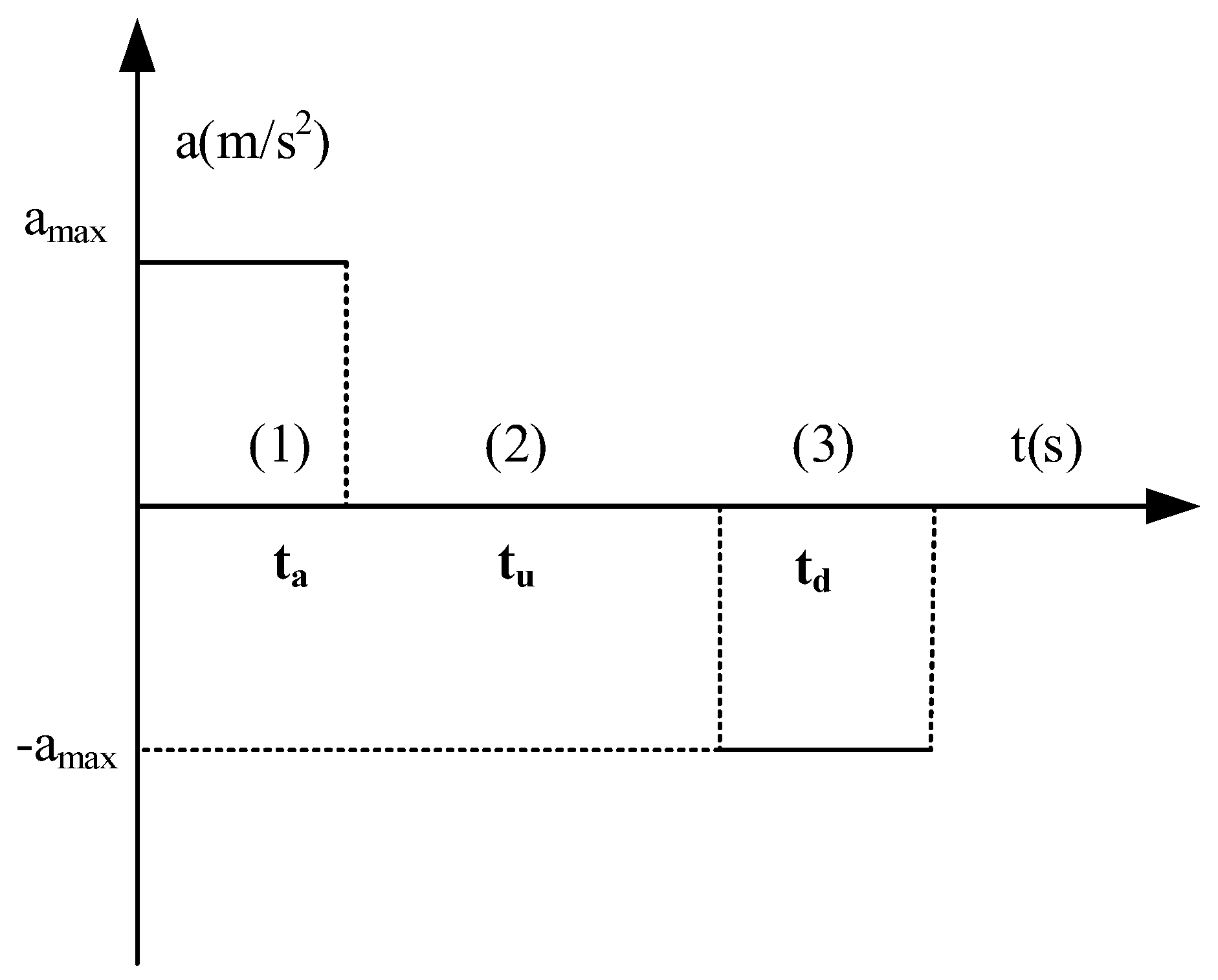
4.1. Modeling of Streamlined Motion Components for Continuous Acceleration/Deceleration of Trolleys
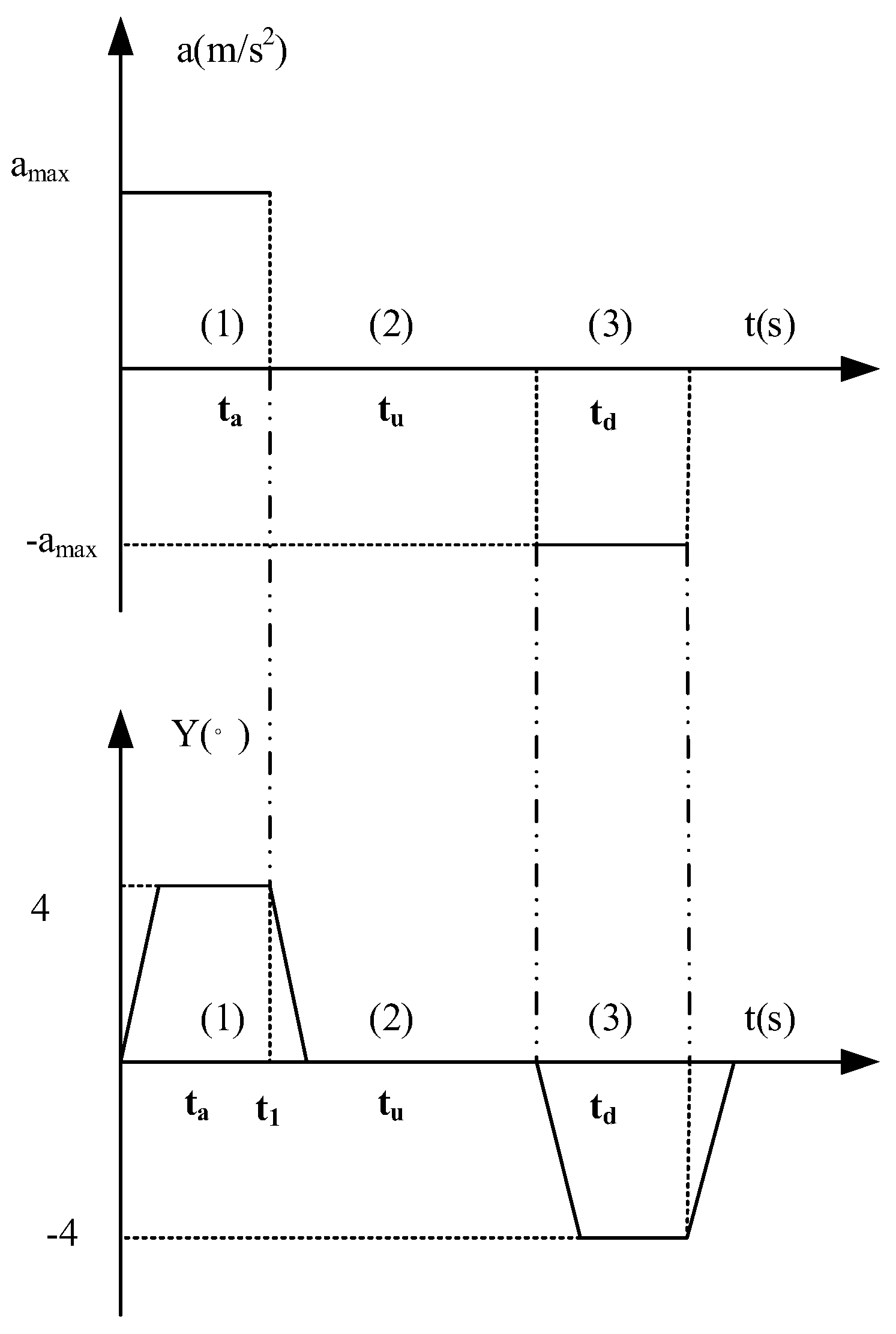
4.2. Modeling of Motion Components Caused by Acceleration/Deceleration Impact of Traveling Mechanism
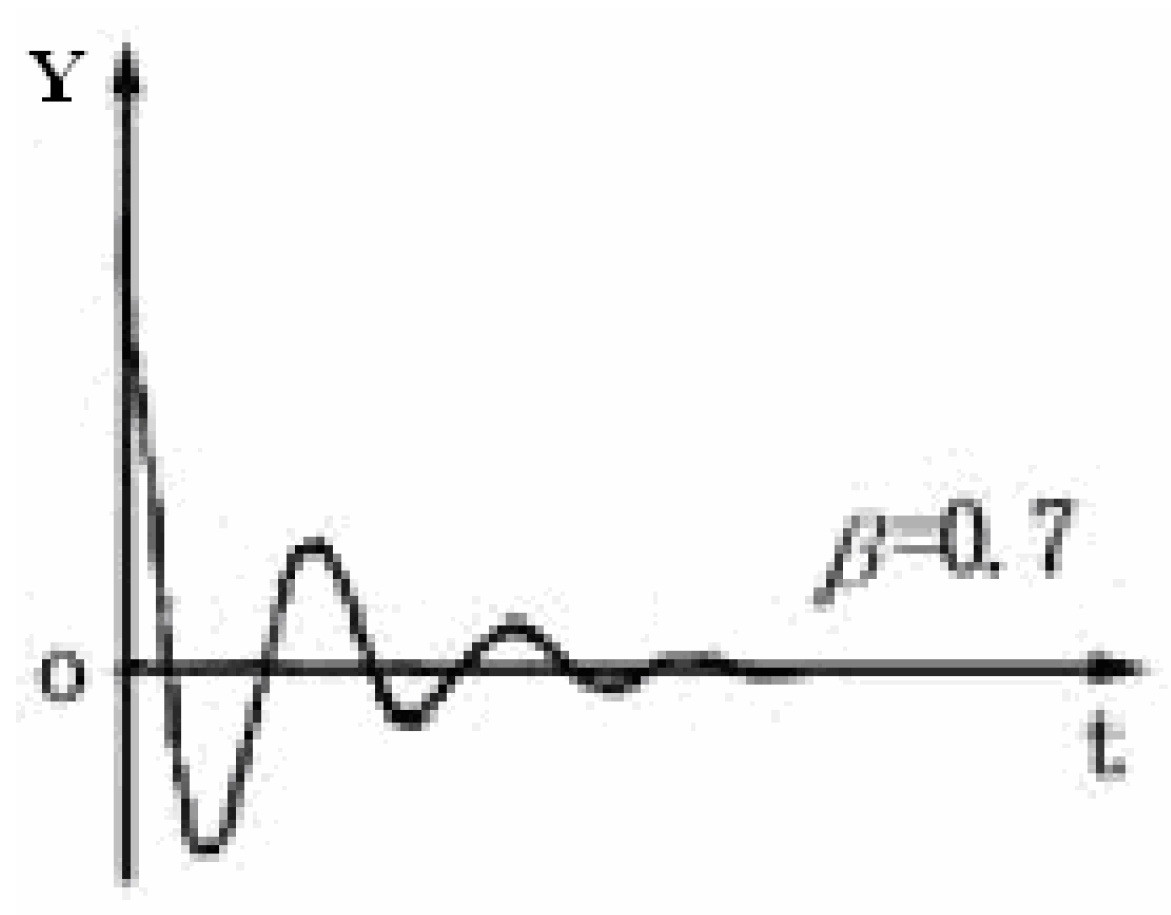
4.3. Modeling of a Special Motion Component
5. Implementation and Evaluation
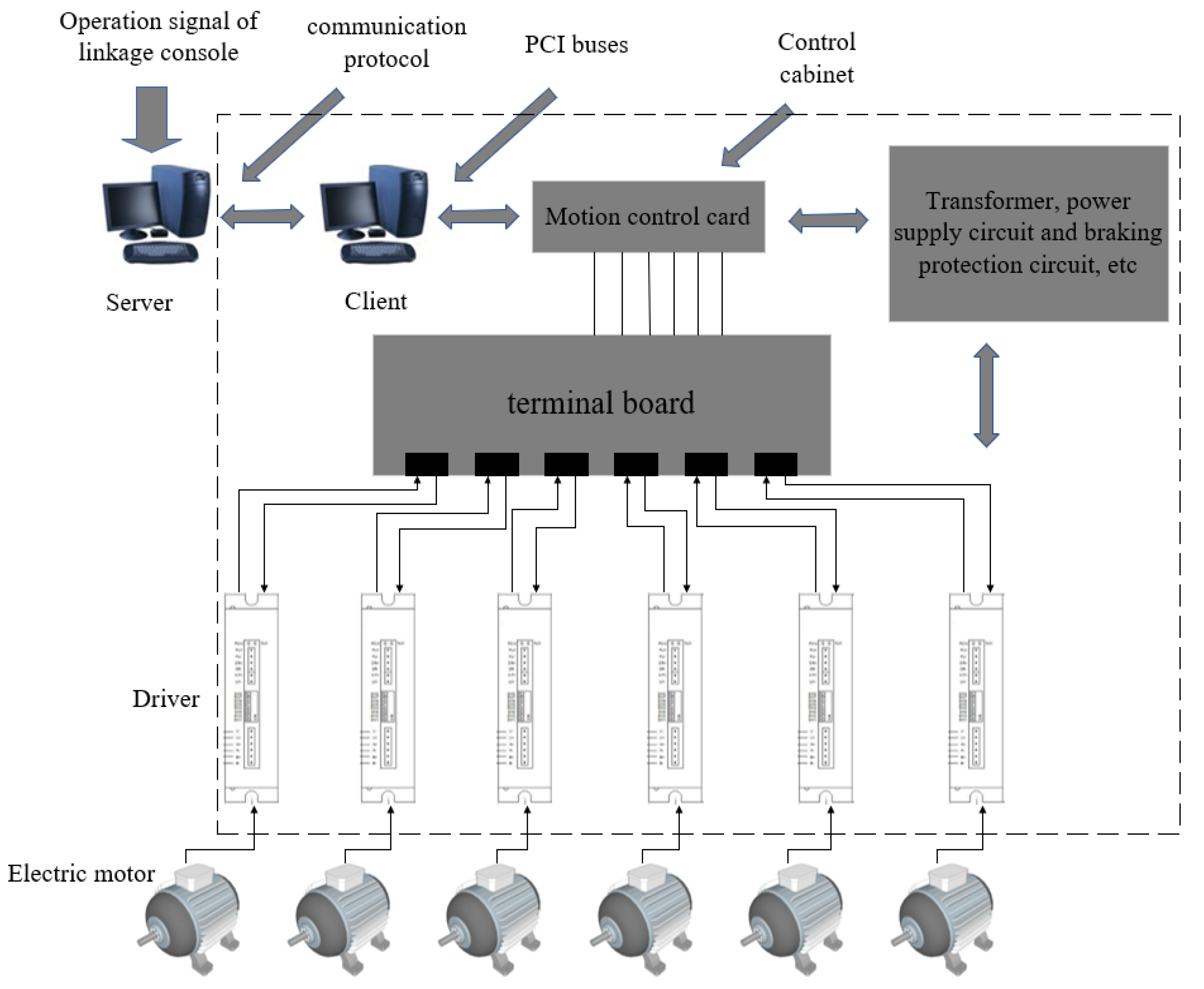
5.1. System Implementation
5.2. Application Effect Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kang, S.; Lee, S.; Choo, Y. Development of a Remote Operation System for a Quay Crane Simulator. J. Inst. Control Robot. Syst. 2015, 21, 385–390. [Google Scholar] [CrossRef]
- Rouvinen, A.; Lehtinen, T.; Korkealaakso, P. Container Gantry Crane Simulator for Operator Training. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2005, 219, 325–336. [Google Scholar] [CrossRef]
- Juang, J.R.; Hung, W.H.; Kang, S.C. SimCrane 3D(+): A crane simulator with kinesthetic and stereoscopic vision. Adv. Eng. Inform. 2013, 27, 506–518. [Google Scholar] [CrossRef]
- Lu, K.-L.; Mi, W.-J.; Jiang, M.-M.; Liu, Y.-B. Real-time simulation dynamics model and solution algorithm for the trolley-hoisting system in container crane simulated training system. J. Vibroenginerring 2016, 18, 1254–1269. [Google Scholar]
- Guo, X.; Song, Q. Research on Modeling and Simulation Techniques of Electromechanical Integration Based on Virtual Prototype. Agro Food Ind. Hi-Tech 2017, 28, 2303–2306. [Google Scholar]
- Jin, Z.; Gao, F.; Li, H.; Li, J. Research of Reliability Enhancement Testing about Wear Failure Component Based on Virtual Prototype Technology. In Proceedings of the 8th International Conference on Management and Computer Science (ICMCS), Shenyang, China, 10–12 August 2018; Atlantis Press: Dordrecht, The Netherlands, 2018; pp. 83–88. [Google Scholar]
- Fang, Z.; Zhang, H. Digital Design Technology and Its Application of Servo Device. In Proceedings of the 3rd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Shanghai, China, 4–6 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 487–491. [Google Scholar]
- Xiao, X.; Joshi, S. Decomposition and Sequencing for a 5-Axis Hybrid Manufacturing Process. In Proceedings of the ASME 2020 15th International Manufacturing Science and Engineering Conference, Virtual, 3 September 2020. [Google Scholar]
- Xiao, X.; Joshi, S. Process planning for five-axis support free additive manufacturing. Addit. Manuf. 2020, 36, 101569. [Google Scholar] [CrossRef]
- Song, S.; Yang, J. Configurable component framework supporting motion platform-based VR simulators. J. Mech. Sci. Technol. 2017, 31, 2985–2996. [Google Scholar] [CrossRef]
- Lu, H.; Zhen, H.; Huang, Y.; Guo, G. Motion Platform Designed for Container Crane Simulator. Int. J. Control Autom. 2016, 9, 97–104. [Google Scholar] [CrossRef]
- Xiao, X.; Joshi, S. Automatic Toolpath Generation for Heterogeneous Objects Manufactured by Directed Energy Deposition Additive Manufacturing Process. J. Manuf. Sci. Eng.-Trans. ASME 2018, 140, 071005. [Google Scholar] [CrossRef]
- Xiao, X.; Waddell, C.; Hamilton, C.; Xiao, H. Quality Prediction and Control in Wire Arc Additive Manufacturing via Novel Machine Learning Framework. Micromachines 2022, 13, 137. [Google Scholar] [CrossRef] [PubMed]
- Fang, Z.; Tsushima, M.; Kitahara, E.; Machida, N.; Wautier, D.; Kemeny, A. Motion cueing algorithm for high performance driving simulator using yaw table. In Proceedings of the 20th World Congress of the International-Federation-of-Automatic-Control (IFAC), Toulouse, France, 9–14 July 2017; Elsevier: Amsterdam, The Netherlands, 2017; pp. 15965–15970. [Google Scholar]
- Ming-Yen, W. Design of a DSP-Based Motion-Cueing Algorithm Using the Kinematic Solution for the 6-DoF Motion Platform. Aerospace 2022, 9, 203. [Google Scholar]
- Pham, D.-A.; Nguyen, D.-T. A novel motion cueing algorithm integrated multi-sensory system-Vestibular and proprioceptive system. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 256–271. [Google Scholar]
- Zou, S.; Pang, L.; Xu, C.; Xiao, X. Effect of Process Parameters on Distortions Based on the Quantitative Model in the SLM Process. Appl. Sci.-Basel 2022, 12, 1567. [Google Scholar] [CrossRef]
- Colombet, F.; Fang, Z.; Kemeny, A. Tilt thresholds for acceleration rendering in driving simulation. Simul.-Trans. Soc. Model. Simul. Int. 2017, 93, 595–603. [Google Scholar] [CrossRef]
- Bae, J.; Cha, J.; Seo, M.-G.; Lee, K.; Lee, J.; Ku, N. Experimental Study on Development of Mooring Simulator for Multi Floating Cranes. J. Mar. Sci. Eng. 2021, 9, 344. [Google Scholar] [CrossRef]
- Chen, N.; Liu, X.; Li, R.; Zheng, X.; Chen, S.; Zhang, H. Applied in Crane Simulator Based on the Fuzzy Control Washout Algorithm. In Proceedings of the 37th Chinese Control. Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 2106–2110. [Google Scholar]
- Landsverk, R.; Zhou, J. Modeling and Simulation of an Offshore Crane. In Proceedings of the 13th IEEE Conference on Industrial Electronics and Applications (ICIEA, Wuhan, China, 31 May–2 June 2018; pp. 713–718. [Google Scholar]
- Masullo, M.; Pascale, A.; Toma, R.A.; Ruggiero, G.; Maffei, L. Virtual Reality Overhead Crane Simulator. In Proceedings of the 3rd International Conference on Industry 4.0 and Smart Manufacturing (ISM), Linz, Austria, 2–4 November 2022; pp. 205–215. [Google Scholar]
- Noda, Y.; Hoshi, R.; Kaneshige, A. Training Simulator for Acquiring Operational Skill to Operate Overhead Traveling Crane while Suppressing Load Sway. Shock Vib. 2019, 2019, 3060457. [Google Scholar] [CrossRef]
- Cha, M.; Yang, J.; Han, S. An interactive data-driven driving simulator using motion blending. Comput. Ind. 2008, 59, 520–531. [Google Scholar] [CrossRef]
- Cha, M.; Yang, J.; Han, S. A Hybrid Driving Simulator with Dynamics-Driven Motion and Data-Driven Motion. Simul.-Trans. Soc. Model. Simul. Int. 2008, 84, 359–371. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification Number | Categories | Trigger Conditions | End Conditions | Direction Involved |
|---|---|---|---|---|
| Case1 | Grab Boxes | Panel button = Spreader latch Right hand handle pushed back | Auto End | Z |
| Case2 | Placement boxes | Panel button = Spreader unlock Push the right-hand handle forward to stop | Auto End | Z |
| Case3 | Trolley acceleration | Left handle from neutral to forward or backward push | Reach the maximum | X |
| Case4 | Trolley deceleration | The left handle is pushed from the front or back to return to the neutral position | Speed reduced to 0 | X |
| Case5 | Through the rail seam | The front wheels of the trolley reach the rail seam position | Auto End | X β |
| Case6 | Traveling mechanism acceleration | Right-hand handle from neutral to forward or backward push | Auto End | Y |
| Case7 | Traveling mechanism deceleration | The right-hand handle is pushed forward or backward to return to the neutral position | Auto End | Y |
| Case8 | Boom pitch | Panel button = Boom pitch | Auto End | X, Y and Z |
| Case9 | Wind-induced vibration | Program setting trigger | End of program setting | All directions |
| Comparative Projects | Existing Motion Blending Techniques | Streamlined Motion Blending Techniques |
|---|---|---|
| Applicable object | Vehicle driving simulator | Crane simulator |
| Motion decomposition method | Data collection and segmentation | Modeling by physical subprocess |
| Digital form of motion element | Data fragment in database | Formula model |
| Motion blending execution mode | Called by database | Called by subprogram block |
| The output results after blending | The real movement of automobile in the virtual world | The real movement of crane in the virtual world can be realized by the moving platform |
| The conditions for the trigger call of the motion element | Scene setting and real-time interactive action | Scene setting and real-time interactive action |
| The way of motion blending | Linear superposition by coordinate component alignment | Linear superposition by coordinate component alignment |
| Technical development content | 1. Collecting large amounts of motion data through experiments 2. Deep processing of collected data | 1. Dynamic analysis and modeling. 2. Validation of the established model |
| Program complexity | Complication | Edulcorate |
| Real time | General | Excellent |
| Programming difficulty level | Rather difficult | Simple |
| Level of occupancy of computing resources | Occupying more and requiring database system support | Less occupied and no database system support required |
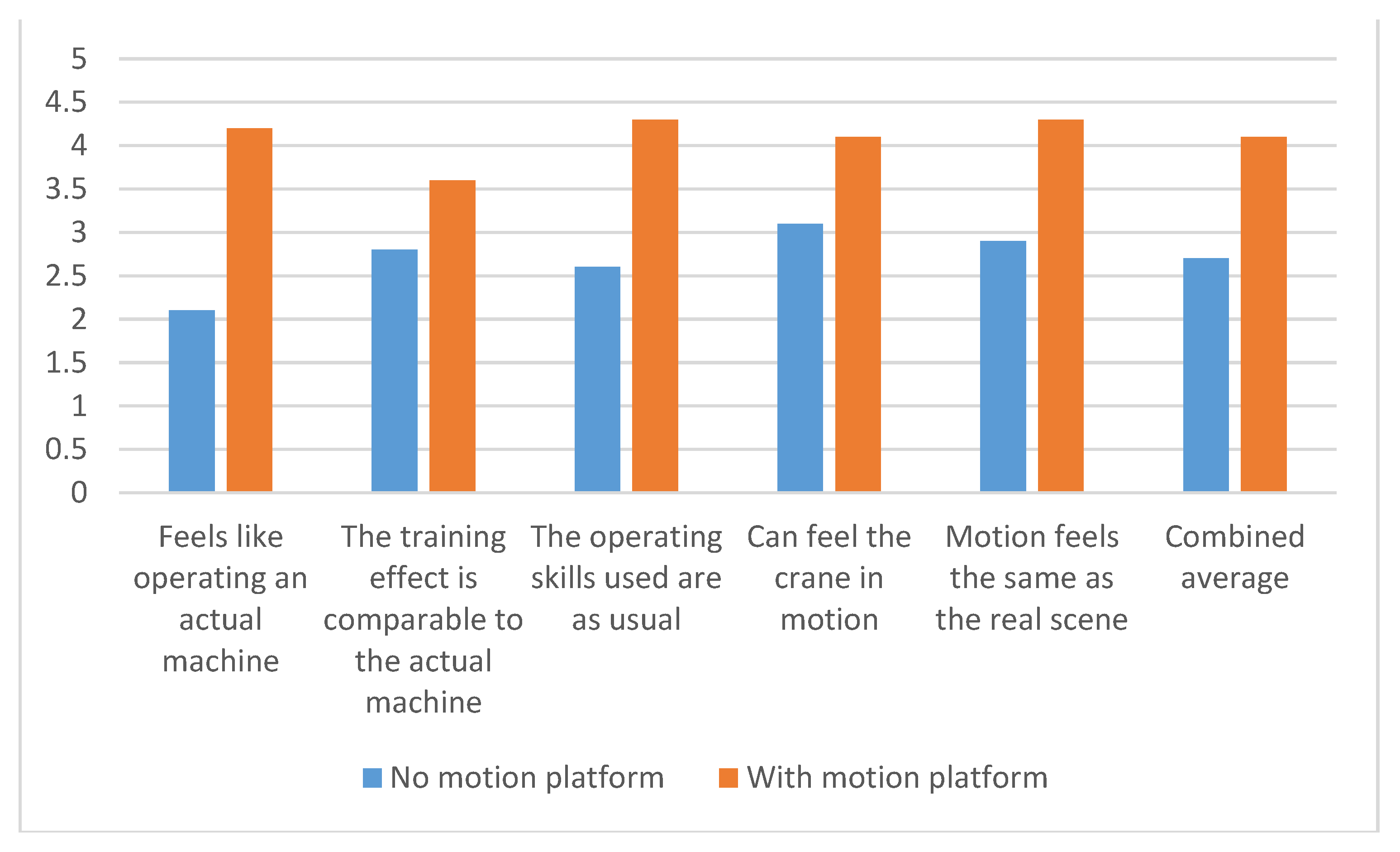
| Average of the 5 Statements to Be Tested | No Motion Platform | With Motion Platform |
|---|---|---|
| Feels like operating an actual machine | 2.1 | 4.2 |
| The training effect is comparable to the actual machine | 2.8 | 3.6 |
| The operating skills used are as usual | 2.6 | 4.3 |
| Can feel the crane in motion | 3.1 | 4.1 |
| Motion feels the same as the real scene | 2.9 | 4.3 |
| Combined average | 2.7 | 4.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Luo, Y.; Xiao, H.; Li, Z.; Xu, C.; Wang, G. Motion Generation for Crane Simulators Using Streamlined Motion Blending Technology. Appl. Sci. 2022, 12, 8799. https://doi.org/10.3390/app12178799
Zhu Z, Luo Y, Xiao H, Li Z, Xu C, Wang G. Motion Generation for Crane Simulators Using Streamlined Motion Blending Technology. Applied Sciences. 2022; 12(17):8799. https://doi.org/10.3390/app12178799
Chicago/Turabian StyleZhu, Ze, Yangyi Luo, Hanbin Xiao, Zhanfeng Li, Chang Xu, and Guoxian Wang. 2022. "Motion Generation for Crane Simulators Using Streamlined Motion Blending Technology" Applied Sciences 12, no. 17: 8799. https://doi.org/10.3390/app12178799
APA StyleZhu, Z., Luo, Y., Xiao, H., Li, Z., Xu, C., & Wang, G. (2022). Motion Generation for Crane Simulators Using Streamlined Motion Blending Technology. Applied Sciences, 12(17), 8799. https://doi.org/10.3390/app12178799