



A Quasi-Velocity-Based Tracking Controller for a Class of Underactuated Marine Vehicles

Abstract
:1. Introduction
- (i)
- Development of a trajectory tracking controller in terms of IQV for asymmetric underactuated vehicles moving in the horizontal plane.
- (ii)
- Extension of IQV concept for tracking controller for underactuated vehicles with 3 DOF.
- (iii)
- Compared to existing controllers employing a combination of baskstepping and SMC methods, the proposed algorithm uses a velocity transformation resulting in a vector of new variables that includes the dynamic parameters of the vehicle model.
- (iv)
- Indication of the mathematical conditions for the implementation of such an algorithm and its verification based on simulation studies performed for two vehicles with different dynamics and for two different desired trajectories.
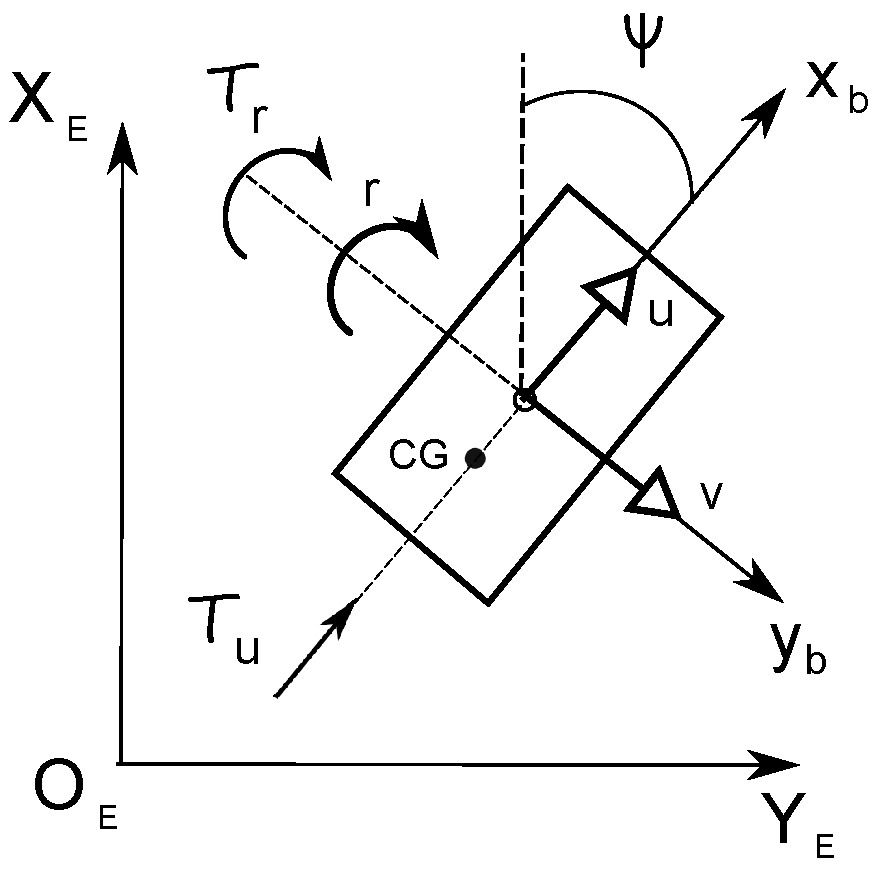
2. Problem Formulation
3. Equations of Motion in Terms of Quasi-Velocities
4. Trajectory Tracking Control Algorithm
4.1. Tracking Problem and Assumptions
4.2. Kinematic Control Algorithm
4.3. Dynamic Control Algorithm
4.4. Controller
- (a)
- Kinematic control algorithm which makes the velocity control subsystem uniformly ultimately bounded;
- (b)
- Dynamic control algorithm which moves the vehicle to a desired trajectory (and at least ensures uniformly ultimate boundedness).
5. Simulations and Comparison
5.1. Vehicle Models and Test Conditions
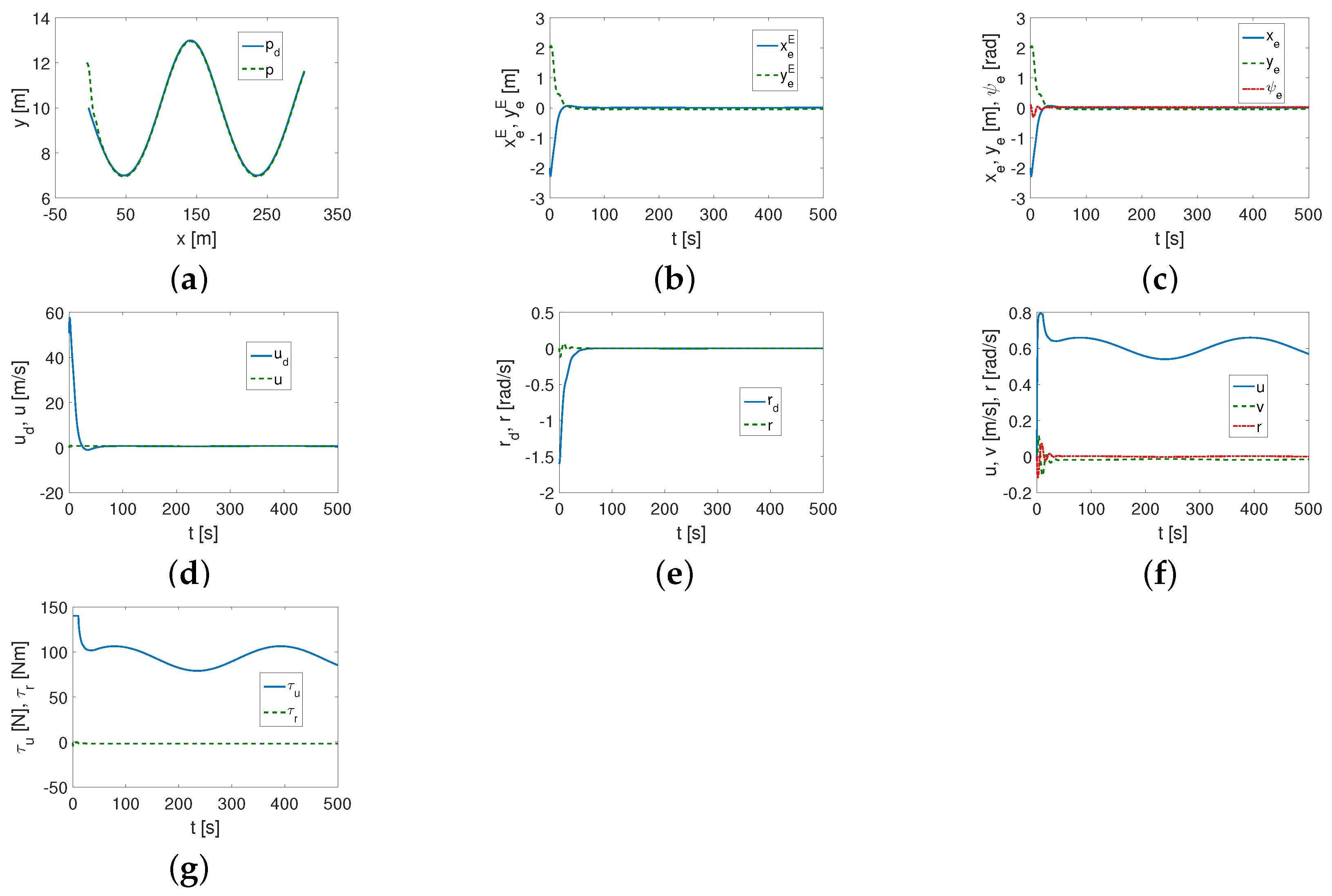
5.1.1. SIRENE Test Using Proposed Algorithm
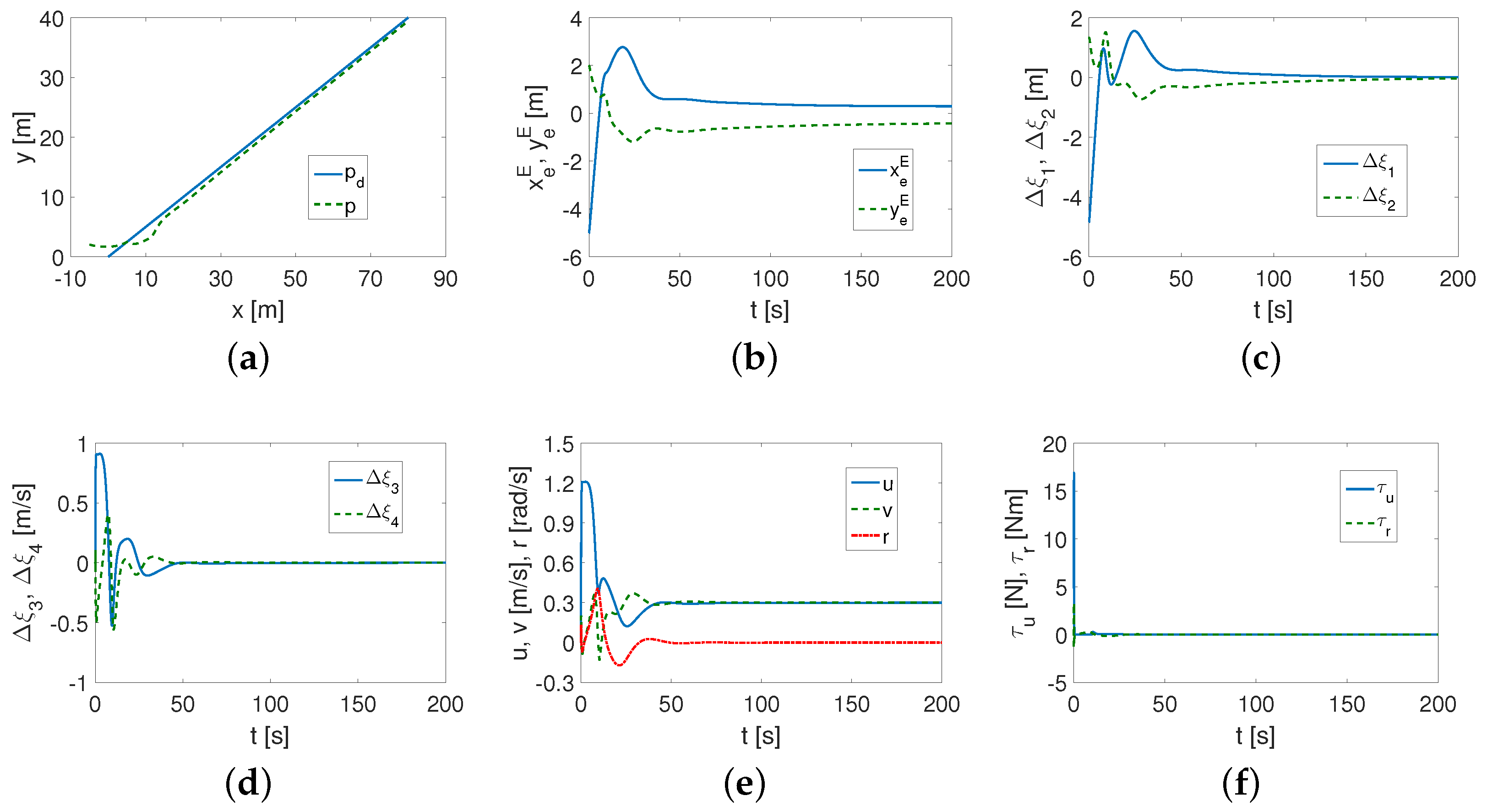
5.1.2. Kambara Test Using Proposed Algorithm
5.1.3. Comparison with Another Controller
5.1.4. Discussion of Results
6. Comments on the Proposed Algorithm Using IQV
- It can be applied to asymmetric vehicles, and thereby to a dynamic model more realistic than the model with a diagonal inertia matrix;
- Selection of controller parameters is intuitive and does not require any additional search methods (this can be explained by the fact that the dynamic parameters are already included in the algorithm, which makes it easier to select the controller parameters);
- In contrast to the usually used algorithms, it gives a potential possibility to estimate the effect of couplings on the vehicle behavior in motion (this is possible because after the velocity transformation one can obtain additional information hidden in the symmetric inertia matrix, but this issue, however, was not the subject of this paper);
- This is also an extension of the IQV control concept for underatuated vehicles with 3 DOF (since for fully activated marine vehicles there are algorithms for up to 6 DOF, such as, e.g., in [49]).
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- AbdElmoniem, A.; Osama, A.; Abdelaziz, M.; Maged, S.A. A path-tracking algorithm using predictive Stanley lateral controller. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420974852. [Google Scholar] [CrossRef]
- Ge, J.; Pei, H.; Yao, D.; Zhang, Y. A robust path tracking algorithm for connected and automated vehicles under i-VICS. Transp. Res. Interdiscip. Perspect. 2021, 9, 100314. [Google Scholar]
- Seckin, A.C. A Natural Navigation Method for Following Path Memories from 2D Maps. Arab. J. Sci. Eng. 2020, 45, 10417–10432. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Control of Ships and Underwater Vehicles; Springer: London, UK, 2009. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley and Sons: Chichester, UK, 1994. [Google Scholar]
- Kim, J.H.; Yoo, S.J. Adaptive Event-Triggered Control Strategy for Ensuring Predefined Three-Dimensional Tracking Performance of Uncertain Nonlinear Underactuated Underwater Vehicles. Mathematics 2021, 9, 137. [Google Scholar] [CrossRef]
- Huang, B.; Zhou, B.; Zhang, S.; Zhu, C. Adaptive prescribed performance tracking control for underactuated autonomous underwater vehicles with input quantization. Ocean Eng. 2021, 221, 108549. [Google Scholar] [CrossRef]
- Jiang, Y.; Guo, C.; Yu, H. Robust trajectory tracking control for an underactuated autonomous underwater vehicle based on bioinspired neurodynamics. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418806745. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Trajectory tracking sliding mode control of underactuated AUVs. Nonlinear Dyn. 2016, 84, 1079–1091. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, B.; Liao, Y.; Wang, B. Finite-Time Trajectory Tracking Control for Uncertain Underactuated Marine Surface Vessels. IEEE Access 2019, 7, 102321–102330. [Google Scholar] [CrossRef]
- Behal, A.; Dawson, D.M.; Dixon, W.E.; Fang, Y. Tracking and Regulation Control of an Underactuated Surface Vessel with Nonintegrable Dynamics. IEEE Trans. Autom. Control 2002, 47, 495–500. [Google Scholar] [CrossRef]
- Jiang, Z.P. Global tracking control of underactuated ships by Lyapunov’s direct method. Automatica 2002, 38, 301–309. [Google Scholar] [CrossRef]
- Godhavn, J.M.; Fossen, T.I.; Berge, S.P. Non-Linear and Adaptive Backstepping Designs for Tracking Control of Ships. Int. J. Adapt. Control Signal Process. 1998, 12, 649–670. [Google Scholar] [CrossRef]
- Pettersen, K.Y.; Nijmeijer, H. Underactuated ship tracking control: Theory and experiments. Int. J. Control 2001, 74, 1435–1446. [Google Scholar] [CrossRef]
- Repoulias, F.; Papadopoulos, E. Planar trajectory planning and tracking control design for underactuated AUVs. Ocean Eng. 2007, 34, 1650–1667. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Qiao, L.; Zhang, W. Robust adaptive trajectory tracking control of underactuated surface vessel in fields of marine practice. J. Mar. Sci. Technol. 2018, 23, 950–957. [Google Scholar] [CrossRef]
- Zhao, Y.; Sun, X.; Wang, G.; Fan, Y. Adaptive Backstepping Sliding Mode Tracking Control for Underactuated Unmanned Surface Vehicle with Disturbances and Input Saturation. IEEE Access 2021, 9, 1304–1312. [Google Scholar] [CrossRef]
- Do, K.D. Robust adaptive tracking control of underactuated ODINs under stochastic sea loads. Robot. Auton. Syst. 2015, 72, 152–163. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P.; Pan, J. Underactuated Ship Global Tracking under Relaxed Conditions. IEEE Trans. Autom. Control 2002, 47, 1529–1536. [Google Scholar] [CrossRef]
- Pettersen, K.Y.; Nijmeijer, H. Global practical stabilization and tracking for an underactuated ship—A combined averaging and backstepping approach. Model. Identif. Control 1999, 20, 189–199. [Google Scholar] [CrossRef]
- Chwa, D. Global Tracking Control of Underactuated Ships with Input and Velocity Constraints Using Dynamic Surface Control Method. IEEE Trans. Control Syst. Technol. 2011, 19, 1357–1370. [Google Scholar] [CrossRef]
- Liang, H.; Li, H.; Xu, D. Nonlinear Model Predictive Trajectory Tracking Control of Underactuated Marine Vehicles: Theory and Experiment. IEEE Trans. Ind. Electron. 2021, 68, 4238–4248. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, C.; Wei, Y.; Wang, J. Neural-Based Command Filtered Backstepping Control for Trajectory Tracking of Underactuated Autonomous Surface Vehicles. IEEE Access 2020, 8, 42482–42490. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, X.; Chen, T.; Yan, Z.; Yang, Z. Trajectory Tracking Control of an Underactuated AUV Based on Backstepping Sliding Mode with State Prediction. IEEE Access 2019, 7, 181983–181993. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Wang, S.X.; Wu, M. An efficient neural network approach to tracking control of an autonomous surface vehicle with unknown dynamics. Expert Syst. Appl. 2013, 40, 1629–1635. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef]
- Zhang, L.J.; Qi, X.; Pang, Y.J. Adaptive output feedback control based on DRFNN for AUV. Ocean Eng. 2009, 36, 716–722. [Google Scholar] [CrossRef]
- Duan, K.; Fong, S.; Chen, P. Fuzzy observer-based tracking control of an underactuated underwater vehicle with linear velocity estimation. IET Control Theory Appl. 2020, 14, 584–593. [Google Scholar] [CrossRef]
- Raimondi, F.M.; Melluso, M. Fuzzy/kalman hierarchical horizontal motion control of underactuated ROVs. Int. J. Adv. Robot. Syst. 2010, 7, 139–154. [Google Scholar] [CrossRef]
- Peng, Z.; Jiang, Y.; Wang, J. Event-Triggered Dynamic Surface Control of an Underactuated Autonomous Surface Vehicle for Target Enclosing. IEEE Trans. Ind. Electron. 2021, 68, 3402–3412. [Google Scholar] [CrossRef]
- Zhu, G.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M. Event-Triggered Adaptive Neural Fault-Tolerant Control of Underactuated MSVs with Input Saturation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7045–7057. [Google Scholar] [CrossRef]
- Yan, Z.; Yu, H.; Zhang, W.; Li, B.; Zhou, J. Globally finite-time stable tracking control of underactuated UUVs. Ocean Eng. 2015, 107, 132–146. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Sun, Y.; Lewis, F.L. Robust adaptive trajectory tracking control of underactuated autonomous underwater vehicles with prescribed performance. Int. J. Robust Nonlinear Control 2019, 29, 4629–4643. [Google Scholar] [CrossRef]
- Chen, L.; Cui, R.; Yang, C.; Yan, W. Adaptive Neural Network Control of Underactuated Surface Vessels with Guaranteed Transient Performance: Theory and Experimental Results. IEEE Trans. Ind. Electron. 2020, 67, 4024–4035. [Google Scholar] [CrossRef]
- Park, B.S. Neural Network-Based Tracking Control of Underactuated Autonomous Underwater Vehicles with Model Uncertainties. J. Dyn. Syst. Meas. Control Trans. ASME 2015, 137, 021004. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S.; Lin, H. Transverse function control with prescribed performance guarantees for underactuated marine surface vehicles. Int. J. Robust Nonlinear Control 2019, 29, 1577–1596. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, G.; Fan, Y.; Mu, D.; Sun, X. Adaptive Sliding Mode Trajectory Tracking Control for Unmanned Surface Vehicle with Modeling Uncertainties and Input Saturation. Appl. Sci. 2019, 9, 1240. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y. Further results on global stabilisation and tracking control for underactuated surface vessels with non-diagonal inertia and damping matrices. Int. J. Control 2015, 88, 1679–1692. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Nersesov, S.; Clayton, G. Trajectory Tracking Control of Planar Underactuated Vehicles. IEEE Trans. Autom. Control 2017, 62, 1959–1965. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Jia, Z.; Hu, Z.; Zhang, W. Adaptive output-feedback control with prescribed performance for trajectory tracking of underactuated surface vessels. ISA Trans. 2019, 95, 18–26. [Google Scholar] [CrossRef]
- Paliotta, C.; Lefeber, E.; Pettersen, K.Y.; Pinto, J.; Costa, M.; de Figueiredo Borges de Sousa, J.T. Trajectory Tracking and Path Following for Underactuated Marine Vehicles. IEEE Trans. Control Syst. Technol. 2019, 27, 1423–1437. [Google Scholar] [CrossRef]
- Wang, C.; Xie, S.; Chen, H.; Peng, Y.; Zhang, D. A decoupling controller by hierarchical backstepping method for straight-line tracking of unmanned surface vehicle. Syst. Sci. Control Eng. 2019, 7, 379–388. [Google Scholar] [CrossRef]
- Wang, N.; Su, S.F.; Pan, X.; Yu, X.; Xie, G. Yaw-Guided Trajectory Tracking Control of an Asymmetric Underactuated Surface Vehicle. IEEE Trans. Ind. Inform. 2019, 15, 3502–3513. [Google Scholar] [CrossRef]
- Loduha, T.A.; Ravani, B. On First-Order Decoupling of Equations of Motion for Constrained Dynamical Systems. Trans. ASME J. Appl. Mech. 1995, 62, 216–222. [Google Scholar] [CrossRef]
- Kozlowski, K.; Herman, P. Control of Robot Manipulators in Terms of Quasi-Velocities. J. Intell. Robot. Syst. 2008, 53, 205–221. [Google Scholar] [CrossRef]
- Sinclair, A.J.; Hurtado, J.E.; Junkins, J.L. Linear Feedback Controls using Quasi Velocities. J. Guid. Control Dyn. 2006, 29, 1309–1314. [Google Scholar] [CrossRef]
- Herman, P. Modified set-point controller for underwater vehicles. Math. Comput. Simul. 2010, 80, 2317–2328. [Google Scholar] [CrossRef]
- Herman, P. Application of nonlinear controller for dynamics evaluation of underwater vehicles. Ocean Eng. 2019, 179, 59–66. [Google Scholar] [CrossRef]
- Herman, P. Application of a Trajectory Tracking Algorithm for Underactuated Underwater Vehicles Using Quasi-Velocities. Appl. Sci. 2022, 12, 3496. [Google Scholar] [CrossRef]
- Herman, P. Numerical Test of Several Controllers for Underactuated Underwater Vehicles. Appl. Sci. 2020, 10, 8292. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for UUVs with Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean. Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Soylu, S.; Buckham, B.J.; Podhorodeski, R.P. A chattering-free sliding-mode controller for underwater vehicles with fault-tolerant infinity-norm thrust allocation. Ocean Eng. 2008, 35, 1647–1659. [Google Scholar] [CrossRef]
- Fierro, R.; Lewis, F.L. Control of a nonholonomic mobile robot: Backsteping kinematics into dynamics. In Proceedings of the 34th IEEE conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; pp. 3805–3810. [Google Scholar]
- Jiang, Y.; Guo, C.; Yu, H. Horizontal Trajectory Tracking Control for an Underactuated AUV Adopted Global Integral Sliding Mode Control. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 5786–5791. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Zeinali, M.; Notash, L. Adaptive sliding mode control with uncertainty estimator for robot manipulators. Mech. Mach. Theory 2010, 45, 80–90. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, X.; Yin, B.; Liu, W. Adaptive terminal sliding mode based thruster fault tolerant control for underwater vehicle in time-varying ocean currents. J. Frankl. Inst. 2015, 352, 4935–4961. [Google Scholar] [CrossRef]
- Batista, P.; Silvestre, C.; Oliveira, P. A two-step control approach for docking of autonomous underwater vehicles. Int. J. Robust Nonlinear Control 2015, 25, 1528–1547. [Google Scholar] [CrossRef]
- Silpa-Anan, C. Autonomous Underwater Robot: Vision and Control. Master’s Thesis, The Australian National University, Canberra, Australia, 2001. [Google Scholar]
- Lesniak, J.; Stachowiak, M. Simulation Analysis of Selected Vehicle Control Methods with Incomplete Input Signals; Engineering Thesis; Poznan University of Technology: Poznan, Poland, 2020. [Google Scholar]
- Silvestre, C.; Aguiar, A.; Oliveira, P.; Pascoal, A. Control of the SIRENE underwater shuttle: System design and tests at sea. In Proceedings of the 17th International Conference on Offshore Mechanics and Arctic Engineering, Lisbon, Portugal, 5–9 July 1998. [Google Scholar]
- Silpa-Anan, C.; Abdallah, S.; Wettergreen, D. Development of autonomous underwater vehicle towards visual servo control. In Proceedings of the Australian Conference on Robotics and Automation, Melbourne, Australia, 30 August–1 September 2000; pp. 105–110. [Google Scholar]
- Park, B.S.; Yoo, J.Y. Robust trajectory tracking with adjustable performance of underactuated surface vessels via quantized state feedback. Ocean Eng. 2022, 246, 110475. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SIRENE | Kambara | ||
|---|---|---|---|
| Symbol | Value | Value | Unit |
| L | 4.0 | 1.2 | m |
| b | 1.6 | 1.5 | m |
| h | 1.96 | 0.9 | m |
| 2234.5 | 175.4 | kg | |
| 2234.5 | 140.8 | kg | |
| 2000 | 16.07 | kgm2 | |
| 0 | 120 | kg/s | |
| 346 | 90 | kg/s | |
| 1427.2 | 18 | kgm2/s | |
| 35.4090 | 90 | kg/m | |
| 667.5552 | 90 | kg/m | |
| 26,036 | 15 | kgm2 |
| Linear | Trajectory | Cycloid | Trajectory | ||
|---|---|---|---|---|---|
| Index | C. Dist. | V. Dist. | C. Dist. | V. Dist. | |
| MIA | 0.2807 | 0.2821 | 0.0752 | 0.0757 | |
| 0.0972 | 0.1047 | 0.0771 | 0.0756 | ||
| 0.0287 | 0.0262 | 0.0155 | 0.0128 | ||
| 0.2807 | 0.2820 | 0.0753 | 0.0759 | ||
| 0.0981 | 0.1054 | 0.0769 | 0.0754 | ||
| 5.3909 | 9.4245 | 1.3491 | 1.3603 | ||
| 0.0360 | 0.0353 | 0.0361 | 0.0362 | ||
| MIAC | 22.817 | 21.654 | 7.9840 | 15.953 | |
| 6.2126 | 5.2778 | 4.5685 | 4.2121 | ||
| RMS | 1.0112 | 1.0176 | 0.4257 | 0.4297 | |
| KE | 253.92 | 253.96 | 429.61 | 429.61 |
| Linear | Trajectory | Cycloid | Trajectory | ||
|---|---|---|---|---|---|
| Index | C. Dist. | V. Dist. | C. Dist. | V. Dist. | |
| MIA | 0.2573 | 0.2583 | 0.0530 | 0.0700 | |
| 0.1371 | 0.1425 | 0.0855 | 0.0793 | ||
| 0.0518 | 0.0516 | 0.0302 | 0.0223 | ||
| 0.2566 | 0.2582 | 0.0531 | 0.0702 | ||
| 0.1380 | 0.1432 | 0.0853 | 0.0791 | ||
| 6.2570 | 6.2901 | 1.1692 | 1.6046 | ||
| 0.0505 | 0.0544 | 0.0321 | 0.0371 | ||
| MIAC | 64.652 | 74.632 | 96.729 | 106.75 | |
| 1.8703 | 1.1113 | 1.8144 | 1.1432 | ||
| RMS | 0.9303 | 0.9671 | 0.3643 | 0.3950 | |
| KE | 19.679 | 19.662 | 33.637 | 33.635 |
| SIRENE | Kambara | Kambara | ||
|---|---|---|---|---|
| Linear t. | Linear t. | Cycloid t. | ||
| Index | C. Dist. | C. Dist. | C. Dist. | |
| MIA | 0.6669 | 0.5464 | 0.0953 | |
| 0.6032 | 0.4637 | 0.2962 | ||
| 0.4111 | 0.3167 | 0.1988 | ||
| MIAC | 0.0117 | 0.3051 | 0.3627 | |
| 0.0196 | 0.0117 | 0.0246 | ||
| RMS | 1.2537 | 0.9804 | 0.4147 | |
| KE | 252.74 | 16.377 | 24.452 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herman, P. A Quasi-Velocity-Based Tracking Controller for a Class of Underactuated Marine Vehicles. Appl. Sci. 2022, 12, 8903. https://doi.org/10.3390/app12178903
Herman P. A Quasi-Velocity-Based Tracking Controller for a Class of Underactuated Marine Vehicles. Applied Sciences. 2022; 12(17):8903. https://doi.org/10.3390/app12178903
Chicago/Turabian StyleHerman, Przemyslaw. 2022. "A Quasi-Velocity-Based Tracking Controller for a Class of Underactuated Marine Vehicles" Applied Sciences 12, no. 17: 8903. https://doi.org/10.3390/app12178903
APA StyleHerman, P. (2022). A Quasi-Velocity-Based Tracking Controller for a Class of Underactuated Marine Vehicles. Applied Sciences, 12(17), 8903. https://doi.org/10.3390/app12178903