
Predefined-Time Nonsingular Attitude Control for Vertical-Takeoff Horizontal-Landing Reusable Launch Vehicle


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
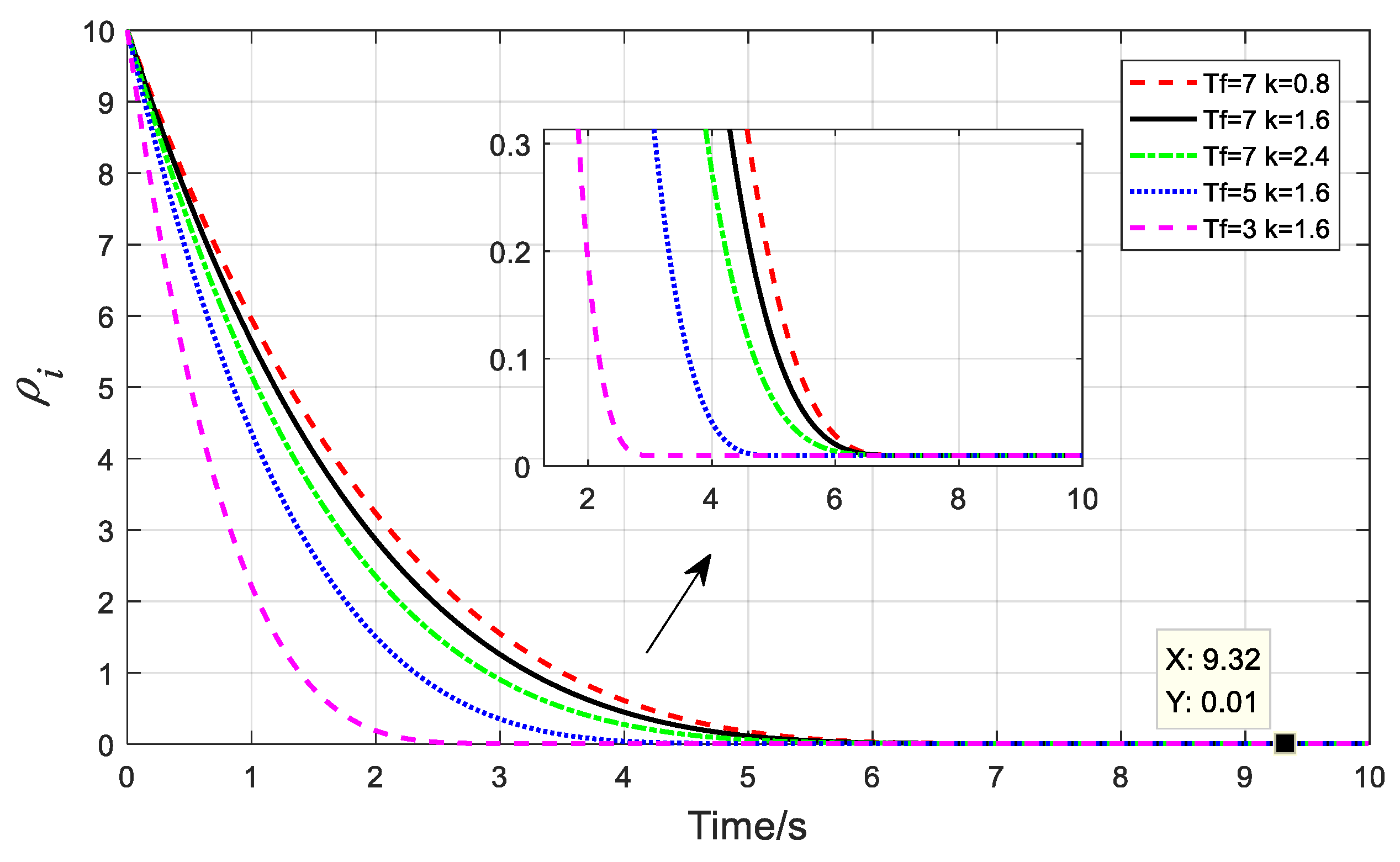
- A novel predefined-time PPF (PTPPF) is proposed. The convergence time in the transient phase of PTPPF to the steady state can be flexibly adjusted by changing one parameter. Moreover, the decreasing rate of PTPPF in transient phase can also be adjusted by changing one parameter on the premise of not changing the convergence time of PPF to reach steady state.
- A novel predefined-time sliding mode surface (SMS) is proposed. When the attitude tracking errors moving on the SMS, they can converge to the origin within a predefined time, and the value of convergence time can be adjusted by one parameter.
- Based on PTPPF and the novel SMS, the RLV control system with a novel nonsingular controller is proposed to prevent the attitude tracking errors from exceeding the prescribed performance bounds. Meanwhile, the singularity can be avoided directly without using piecewise continuous functions.
2. Problem Formulation and Preliminary
2.1. Problem Statement
2.2. Preliminary
- (1)
- is decreasing and positive;
- (2)
3. PTPPF and Error Transformation
3.1. Performance Function Design
3.2. Transformation Method
4. Nonsingular Predefined-Time Attitude Controller Design
5. Simulation and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Dong, Q.; Zong, Q.; Tian, B.; Wang, F. Integrated finite-time disturbance observer and controller design for reusable launch vehicle in reentry phase. J. Aerosp. Eng. 2017, 30, 04016076. [Google Scholar] [CrossRef]
- Ghasemi, A.; Moradi, M.; Menhaj, M.B. Adaptive fuzzy sliding mode control design for a low-lift reentry vehicle. J. Aerosp. Eng. 2012, 25, 210–216. [Google Scholar] [CrossRef]
- Song, J.; Wang, L.; Cai, G.; Qi, X. Nonlinear fractional order proportion-integral-derivative active disturbance rejection control method design for hypersonic vehicle attitude control. Acta Astronaut. 2015, 111, 160–169. [Google Scholar] [CrossRef]
- Ming, C.; Sun, R.; Wang, X.M. Velocity control based on active disturbance rejection for air-breathing supersonic vehicles. Complexity 2018, 3, 6217657. [Google Scholar]
- Mao, Q.; Dou, L.Q.; Zong, Q.; Ding, Z. Attitude controller design for reusable launch vehicles during reentry phase via compound adaptive fuzzy H-infinity control. Aerosp. Sci. Technol. 2018, 72, 36–48. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.Y.; Zong, Q.; Dou, L.; Tian, B.; Liu, W. Improved finite-time command filtered backstepping fault-tolerant control for flexible hypersonic vehicle. J. Frankl. Inst. 2020, 357, 8543–8565. [Google Scholar] [CrossRef]
- Xu, B.; Wang, X.; Shi, Z.K. Robust Adaptive neural control of nonminimum phase hypersonic vehicle model. IEEE Trans. Syst. Man Cybern. Syst. 2019, 52, 1107–1115. [Google Scholar]
- Xu, X.Z.; Wu, W.X.; Zhang, W.G. Sliding mode control for a nonlinear aeroelastic system through backstepping. J. Aerosp. Eng. 2018, 31, 04017080. [Google Scholar] [CrossRef]
- Jiang, S.; Liu, C.S.; Gao, Y.X. MIMO adaptive high-order sliding mode control for quadrotor attitude tracking. J. Aerosp Eng. 2021, 34, 04021022. [Google Scholar] [CrossRef]
- Lu, K.; Xia, Y. Adaptive attitude tracking control for rigid spacecraft with finite-time convergence. Automatica. 2013, 49, 3591–3599. [Google Scholar] [CrossRef]
- Hall, C.E.; Shtessel, Y. Sliding mode disturbance observer-based control for a reusable launch vehicle. J. Guid. Control. Dyn. 2006, 29, 1315–1328. [Google Scholar] [CrossRef]
- Wei, C.Z.; Wang, M.Z.; Lu, B.; Pu, J. Accelerated Landweber iteration based control allocation for fault tolerant control of reusable launch vehicle. Chin. J. Aeronaut. 2021, 35, 175–184. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, B. Distributed fixed-time control of high-order multi-agent systems with non-holonomic constraints. J. Franklin Inst. 2021, 358, 2948–2963. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, C.; Wu, R.; Cui, N. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle. Aerosp. Sci. Technol. 2018, 82, 70–79. [Google Scholar] [CrossRef]
- Ju, X.Z.; Wang, F.; Wei, C.; Zhang, L. Asymmetric barrier Lyapunov function based practical fixed-time control of vertical take-off/ vertical landing reusable launch vehicles with partial state constraints. IFAC-PapersOnLine 2020, 53, 14845–14850. [Google Scholar] [CrossRef]
- Liang, X.H.; Wang, Q.; Hu, C.; Dong, C. Fixed-time observer based fault tolerant attitude control for reusable launch vehicle with actuator faults. Aerosp. Sci. Technol. 2020, 107, 106314. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Sanchez, E.N.; Loukianov, A.G. Predefined-time stability of dynamical systems with sliding modes, in: American Control Conference. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 5842–5846. [Google Scholar]
- Lyu, W.; Zhai, D.-H.; Xiong, Y.; Xia, Y. Predefined performance adaptive control of robotic manipulators with dynamic uncertainties and input saturation constraints. J. Frankl. Inst. 2021, 2, 7142–7169. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Muñoz-Vázquez, A.J.; Defoort, M.; Jiménez-Rodríguez, E.; Loukianov, A.G. A class of predefined-time controllers for uncertain second-order systems. Eur. J. Control. 2019, 53, 52–58. [Google Scholar]
- Zhang, L.; Ju, X.Z.; Cui, N.G. Ascent control of heavy-lift launch vehicle with guaranteed predefined performance. Aerosp. Sci. Technol. 2021, 110, 106511. [Google Scholar] [CrossRef]
- Wu, C.; Yan, J.; Wu, X.; Guo, Y.; Mou, P.; Xiao, B. Predefined-time attitude stabilization of receiver aircraft in aerial refueling. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3321–3325. [Google Scholar] [CrossRef]
- Bu, X.; Wu, X.; Zhu, F.; Huang, J.; Ma, Z.; Zhang, R. Novel prescribed performance neural control of a flexible air-breathing hypersonic vehicle with unknown initial errors. ISA Trans. 2015, 59, 149–159. [Google Scholar] [CrossRef]
- Zhang, C.; Ma, G.; Sun, Y.; Li, C. Prescribed performance adaptive attitude tracking control for flexible spacecraft with active vibration suppression. Nonlinear Dyn. 2019, 96, 1909–1926. [Google Scholar] [CrossRef]
- Luo, J.; Yin, Z.; Wei, C.; Yuan, J. Low-complexity prescribed performance control for spacecraft attitude stabilization and tracking. Aerosp. Sci. Technol. 2018, 74, 173–183. [Google Scholar] [CrossRef]
- Tian, B.L.; Fan, W.; Zong, Q.; Wang, J.; Wang, F. Nonlinear robust control for reusable launch vehicles in reentry phase based on time-varying high order sliding mode. J. Frankl. Inst. 2013, 350, 1787–1807. [Google Scholar] [CrossRef]
- Munoz-Vazquez, A.J.; Sanchez-Torres, J.D.; Jimenez-Rodriguez, E.; Loukianov, A.G. Predefined-time robust stabilization of robotic manipulators. IEEE ASME Trans. Mechatron. 2019, 24, 1033–1040. [Google Scholar] [CrossRef]
- Liu, L.; Yao, W.; Guo, Y. Prescribed performance tracking control of a free-flying flexible-joint space robot with disturbances under input saturation. J. Frankl. Inst. 2021, 358, 4571–4601. [Google Scholar] [CrossRef]
- Ye, D.; Zou, A.M.; Sun, Z.W. Predefined-time predefined-bounded attitude tracking control for rigid spacecraft. IEEE T. Aero. Elec. Sys. 2021, 58, 464–472. [Google Scholar] [CrossRef]
- Qian, C.J.; Wei, L. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control. 2001, 46, 1061–1079. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 9. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, G. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 2017, 62, 12. [Google Scholar] [CrossRef]
- Hu, Q.; Shao, X.; Guo, L. Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance. IEEE/ASME Trans. Mechatron. 2018, 23, 1. [Google Scholar] [CrossRef]
- Cui, L.; Jin, N. Prescribed-time ESO-based prescribed-time control and its application to partial IGC design. Nonlinear Dyn. 2021, 106, 491–508. [Google Scholar] [CrossRef]
- Shao, X.Y.; Sun, G.H.; Xue, C. Nonsingular terminal sliding mode control for free-floating space manipulator with disturbance. Acta Astronaut. 2021, 181, 396–404. [Google Scholar] [CrossRef]
- Wang, F.; Miao, Y.; Li, C.Y. Attitude control of rigid spacecraft with predefined-time stability. J. Franklin Inst. 2020, 357, 7. [Google Scholar]
- Hu, H.M.; Du, J.W. Active disturbance rejection control for permanent magnet linear synchronous motor. In Proceedings of the 13th International Symposium on Linear Drives for Industry Applications, Wuhan, China, 1–3 July 2021. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Wei, C.; Pu, J.; Cui, N. Predefined-Time Nonsingular Attitude Control for Vertical-Takeoff Horizontal-Landing Reusable Launch Vehicle. Appl. Sci. 2022, 12, 10153. https://doi.org/10.3390/app121910153
Wang M, Wei C, Pu J, Cui N. Predefined-Time Nonsingular Attitude Control for Vertical-Takeoff Horizontal-Landing Reusable Launch Vehicle. Applied Sciences. 2022; 12(19):10153. https://doi.org/10.3390/app121910153
Chicago/Turabian StyleWang, Mingze, Changzhu Wei, Jialun Pu, and Naigang Cui. 2022. "Predefined-Time Nonsingular Attitude Control for Vertical-Takeoff Horizontal-Landing Reusable Launch Vehicle" Applied Sciences 12, no. 19: 10153. https://doi.org/10.3390/app121910153
APA StyleWang, M., Wei, C., Pu, J., & Cui, N. (2022). Predefined-Time Nonsingular Attitude Control for Vertical-Takeoff Horizontal-Landing Reusable Launch Vehicle. Applied Sciences, 12(19), 10153. https://doi.org/10.3390/app121910153