1. Introduction
Noise control methods mainly include passive and active control strategies [
1,
2,
3]. Passive noise control improves ambient acoustic performance by absorbing materials and changing the shape of the structure in conjunction with the environment [
4]. These methods have an obvious effect on reducing the middle- and high-frequency noise in the environment. However, it has a poor effect at low frequencies. The active noise control (ANC) system uses an adaptive algorithm to control the secondary source to generate a reverse secondary sound wave, which is superimposed with the primary sound field to achieve the purpose of canceling noise [
5]. Compared to passive noise control methods, active noise control has a more significant effect on low-frequency noise control and has been widely used in building environments [
6]. In an ANC system, the system identification technology is typically used to estimate the secondary path [
7,
8]. To compensate for the influence of the secondary path model (SPM), as an improvement of the least mean square algorithm, the filtered-x least mean square (FxLMS) algorithm is the most popular adaptive algorithm [
9,
10]. In the FxLMS algorithm, the reference signal must be filtered using the secondary path response function, and then the control filter coefficients must be updated. Therefore, it is necessary to fit the secondary path. The fitting methods of the secondary path are divided into online and offline fittings. In practical use, the adjustment of the power amplifier gain, the change in environment, and the aging of devices will cause the change in secondary path response function. Therefore, it is necessary to perform online fitting on the secondary path, and the FxLMS algorithm can maintain stability when the relative error of the secondary path is
[
11,
12]. Eriksson et al. first proposed the use of auxiliary noise to perform online fitting on the secondary path [
13]. This marked a new journey to pursue a more efficient ANC system. In recent years, different strategies have been used to improve the convergence speed and steady-state performance of secondary path online fitting [
14,
15,
16,
17,
18,
19,
20].
In the process of secondary path modeling (SPM), due to the interaction between the fitting errors of SPM and ANC filters, the FxLMS algorithm is more complicated than the least mean square (LMS) system. More specifically, the accuracy of the ANC control filter fitting affects the accuracy of the error signal used to update the SPM filter. This situation is more complex for an ANC control filter. The accuracy of the SPM filter not only affects the accuracy of the error signal, but also affects the accuracy of the reference signal used to update the ANC filter.
Many researchers have conducted detailed analyses and discussions on important issues, such as convergence speed, steady-state mean square error, and system stability for ANC systems. Bjarnason analyzed the performance of FxLMS on the mean and mean square using a spherical invariant process. It was found that the delay in the coefficient update had only a minor effect on the stability bounds and steady-state behavior of a Gaussian white noise input [
21]. Without using the independence assumption, Tobias et al. conducted a comprehensive analysis of the convergence performance of the FxLMS on the mean. Comprehensive research was conducted on the mean weight behavior of the FxLMS, and the impact of the error in SPM was studied [
22]. Ardekani et al. analyzed the convergence of the ANC system with band-limited white noise and the moving average secondary path. In addition, the pure delay secondary path was discussed in detail. Through a linear model, the upper bound of the adaptive step length was derived [
23].
Zhang et al. analyzed the influence of auxiliary noise power using the mean square criterion and determined the optimal step size of the ANC system [
24]. Xiao et al. conducted a comprehensive theoretical analysis of the narrowband ANC system fitted online using the secondary path. For the narrowband ANC system, the difference equation determines the dynamic performance of the system and derives the closed expression of the system in the steady state [
25]. Liu et al. proposed a strategy for scaling auxiliary noise based on the properties of the narrowband ANC system to improve its convergence and steady-state performance [
26]. Chan et al. used Gaussian white noise as the input signal and found that the difference equation describes the convergence performance of the system in terms of the mean and mean square. In addition, the steady-state error was used to decouple the difference equations to obtain the stability conditions of the system, and an auxiliary noise adjustment method was proposed [
9]. Miyoshi et al. used statistical mechanics methods to analyze the mean square error of the FxLMS in the steady and transient states. Under the actual primary path condition, the theoretical model above can analyze the input signal of non-Gaussian white noise [
27,
28]. Yang et al. used an enhanced weighted vector to analyze the performance of any input reference signal and derived its stability bound [
10]. However, the calculation of the eigenvalues of the correlation matrix is complicated.
The above analysis of ANC filter convergence performance is based on the condition that the secondary path tends to be stable. In other words, the upper bound of the step size of the ANC filter can only be obtained if the relative error of the secondary path is small. To ensure the stability of the system, most online SPM methods have to use offline modeling for a period of time in advance so that the relative error of the secondary path is less than that of
[
14,
15,
17,
18]. This cannot guarantee the convergence of the system in the start-up stage, and sometimes the system does not have the conditions for offline modeling. Moreover, a sudden change in the secondary path can occur when the system is running. The change in the power amplification gain may cause a sizeable relative error in the secondary path and divergence of the entire system.
In this paper, to study the influence of secondary path error on the ANC system, especially in the start-up stage and the sudden change in the secondary path, we analyze the performance of the ANC system with online SPM in detail. First, the factor decomposition method was used to derive the mean convergence condition of the algorithm according to the properties of the secondary path error matrix. The error matrix combined with the characteristics of the secondary path determines the upper bound of the step size of the ANC filter, which changes with the operation of the SPM filter. Second, the energy conservation relation was used to analyze the mean square convergence. Finally, we derived the steady-state mean square error (MSE) of the ANC system. The simulation and experimental results show that the system is quite stable under extreme conditions and has a noticeable noise reduction effect in a specific range of open space, which provides a basis for the ANC system design.
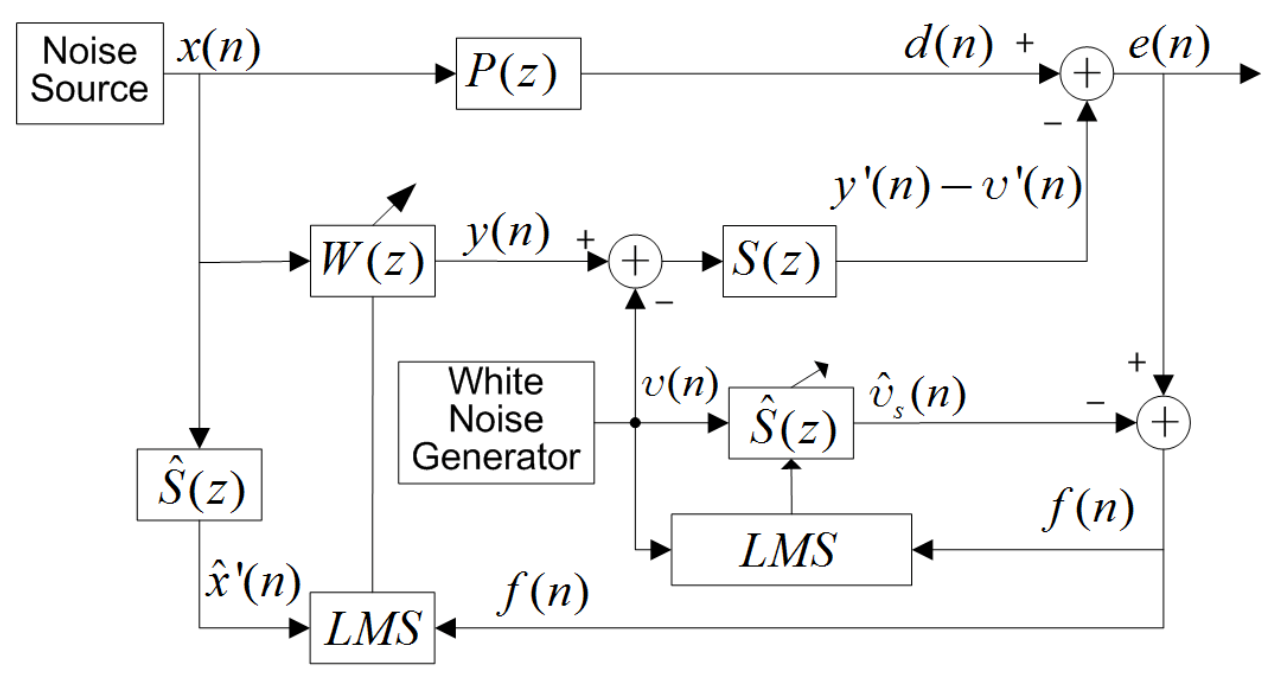
2. The Whole Stage Stability of the ANC System with Online SPM
Figure 1 shows an online secondary modeling ANC system with auxiliary noise. From the results of previous studies [
29], it can be observed that the update of the SPM filter is computed as:
where
is the coefficient vector of the SPM filter with length
and
is the error signal used to update the SPM and ANC filters.
is a Gaussian white noise vector and
is the step-size factor of the SPM filter. Before using the reference signal
to update the ANC filter, it must be filtered by the secondary path
. If
is unknown,
is replaced by
. The ANC filter update equation is as follows:
where
is the reference signal estimation vector with length
,
is the coefficient vector of the ANC filter with length
, and
is the step-size factor of the ANC filter. Then, we will analyze the convergence performance of the ANC system, particularly the influence of the relative error of the secondary path on the system.
To simplify the analysis, we make the following assumptions:
The reference signal is white noise with a Gaussian distribution, the mean value is zero, and the variance is . Therefore, there is no correlation between the reference signal vectors ;
The auxiliary noise is Gaussian white noise with a zero mean and variance . Moreover, and are independent;
The coefficient vector and reference signal vector are independent, which is a widely used assumption.
2.1. Mean Weight Behavior
2.1.1. SPM Filter
The residual error
contains three parts: error
caused by the ANC filter, error
caused by the SPM filter, and background noise
.
where:
Combining with assumptions 1–3, the variance of
can be expressed as:
where
denotes the expectation operator. The Wiener solution
of the secondary path can be obtained by substituting (5) into (6):
It can be seen , . If , a modeling error exists. In practical applications, is an FIR filter. Therefore, reducing or eliminating the modeling error is always possible by making a larger value. In order to simplify the analysis and not lose generality, we set in this paper. For the auxiliary noise vector , the subscript is no longer used to indicate the length.
Let the error coefficient vector of the SPM filter be
. Subtract
from both sides of Equation (1) and take expectation:
where
denotes an identity matrix with compatible dimensions. It can be seen from (8) that, to ensure convergence to the optimal solution, the condition
must be met.
is the largest eigenvalue of the covariance matrix
. Because
is Gaussian white noise, all eigenvalues of the correlation matrix are
. Therefore
must be less than
.
is also the power of the auxiliary noise. In addition, it can be observed that a larger auxiliary noise power can increase the convergence speed of the SPM filter, but it will reduce the steady-state performance of the ANC system. To balance the two conflicting requirements of fast convergence and low residual noise under steady-state conditions, several auxiliary noise power scheduling strategies have been proposed [
15,
18]. A larger auxiliary noise was used in the early stage of the system, and a smaller auxiliary noise was used when the system tended to converge.
2.1.2. ANC Filter
First, we show the Wiener solution of the ANC filter. The signal from the output
of the ANC filter to the noise control point is:
In (10), by taking the derivative of the vector
and setting the derivative to zero, the Wiener solution
of the ANC filter can be presented as:
where:
The correlation matrix of the reference signal is defined as:
It is evident that .
Next, the steady-state solution of the ANC filter is derived. Combining Equations (2), (3) and (9), and taking the expectations on both sides of (2), we obtain:
where
is the reference matrix. As
,
, we obtain:
where
is the steady-state augmented weight vector. Using (16), the steady state can be derived as follows:
where:
As shown in (17), the accuracy of modeling the secondary path influences the steady state of the ANC filter. As in , if the SPM filter converges to the actual secondary path, the ANC filter will converge to its Wiener solution.
We begin by analyzing the stability conditions of the ANC filter. The coefficient vector of the ANC filter is defined as
. The augmented coefficient vector of the ANC filter is:
By using expressions (9) and (2), subtracting
from both sides of expression (2),
can be computed as:
where:
where
denotes the optimal error of the ANC filter. We assume that the update
is very slow and the value of
is so small that
, and we can obtain:
where:
Taking expectations on both sides of (26) and using assumptions 1–3:
Combining (16) and (24), and assumptions 1–3, one obtains:
Substituting (30) into (29) yields:
Equation (31) suggests that the convergence of
is determined by the eigenvalues of
. However, in the start-up stage of ANC system operation or a sudden change occuring in the secondary path, the value of
is large and unknown. Therefore, the eigenvalue of
is challenging to estimate. The relation is:
where
represents the spectral radius of matrix. The upper bound of
can be estimated using
and
. For convenience, the rows and columns of the matrices
and
start at zero. Because
is white noise with Gaussian distribution, the
-element (
) of the matrices
and
can be simplified to:
Applying mean inequality, for any
, one can obtain:
Using the relationship between the spectral radius and norm of the matrix, the upper bound of
and
can be estimated as:
represents the
-norm of matrix
. The
-norm represents the maximum value of the sum of the absolute values of the rows. Combining (32), (37), and (38), we can obtain the upper bound of the
:
The sum
can be estimated by (5) and (6).
Let
and
represent the power of the error signal
and reference signal
, respectively.
and
are estimated using an exponentially smoothed estimator.
where
is a forgetting factor close to one. Because the specific value of each
is not known, it seems difficult to estimate
. However, the sum shows the power amplification ability of the system to a certain extent. Here, it is assumed that the upper bound
R of the signal power amplification gain is known. Even if the value of
R is unknown, the measurement of
K is relatively easy.
Using (39)–(43), the upper bound of
can be expressed as:
This suggests that the stability condition changed with the relative error of the SPM filter. As the ANC and SPM filters converge,
, the stability condition can be replaced by:
which is the stability condition for the mean square behavior in [
9]. This is only acceptable when the relative error of the secondary path is small. The stability condition in Equation (44) is more robust. The upper bound given above is applicable to all periods of ANC system operation.
2.2. Mean Square Behavior
2.2.1. SPM Filter
The covariance matrix of
is defined as
. Multiplying
by its transpose and taking the expectation on both sides of its updating equation, the covariance matrix of
can be expressed as:
For the fourth term, by applying the method introduced in [
30], it can be simplified as:
where
is the trace of the matrix. Because
is Gaussian white noise, substituting (54) into (53) yields:
where
denotes an identity matrix with compatible dimension. It can be observed from the fourth term in (55) that the error of the ANC filter generates a driving term for the differential equation of the secondary path. However, we assumed that the excitation caused by the fifth term is finite. It can be treated as an LMS algorithm for stability analysis from the literature [
9], and the stability condition can be obtained as:
2.2.2. ANC Filter
Multiplying
by its transpose and taking the expectation on both sides of its updating equation, the covariance matrix of
can be expressed as:
However, the analysis of
is mathematically difficult because of the influence of the secondary path error. It can be seen from the properties of the elements that the convergence performance of
is dominated by
. Therefore, it can be transformed into studying the properties of
, which is also a method used in the literature [
24].
can be computed as:
Using (26) and (30) yields:
As shown in the
Appendix A, the second and the third term meet the inequalities:
From (53) and (54), the system is stable in the mean-square sense when the driving term is finite and the step size
satisfies:
In the derivation process, the convergence condition is significantly strengthened. Therefore, to improve the convergence speed in practical applications, the upper bound given in (55) can be increased appropriately.
2.2.3. Steady-State MSE
From (4) and
, the steady-state MSE is given by:
where:
is the variance of
. The second term on the right side of (57) is the steady-state excess MSE (EMSE) of the ANC filter. Using (50) the steady-state EMSE of the ANC filter can be expressed as:
Similar to
,
tends to a zero vector, which results in
being small compared to
. Hence,
can be neglected. Substituting (24) into (58) yields:
where:
is the steady-state EMSE of SPM filter. The definition of
is:
Using assumption 1, it can be derived that:
From (58), (59), and (62), the steady-state EMSE of ANC can be expressed as:
Using (46), the steady-state EMSE of the SPM filter can be computed as:
As shown above, we cannot find the closed form of the steady-state EMSE of the ANC filter for the existence of . Moreover, the SPM and the ANC filters’ steady-state EMSE are coupled with each other. Both steady-state EMSEs can be controlled by step size and . Therefore, when both filters tend to be stable, a smaller step-size factor can be used to reduce the excess mean square error of the system.
5. Conclusions
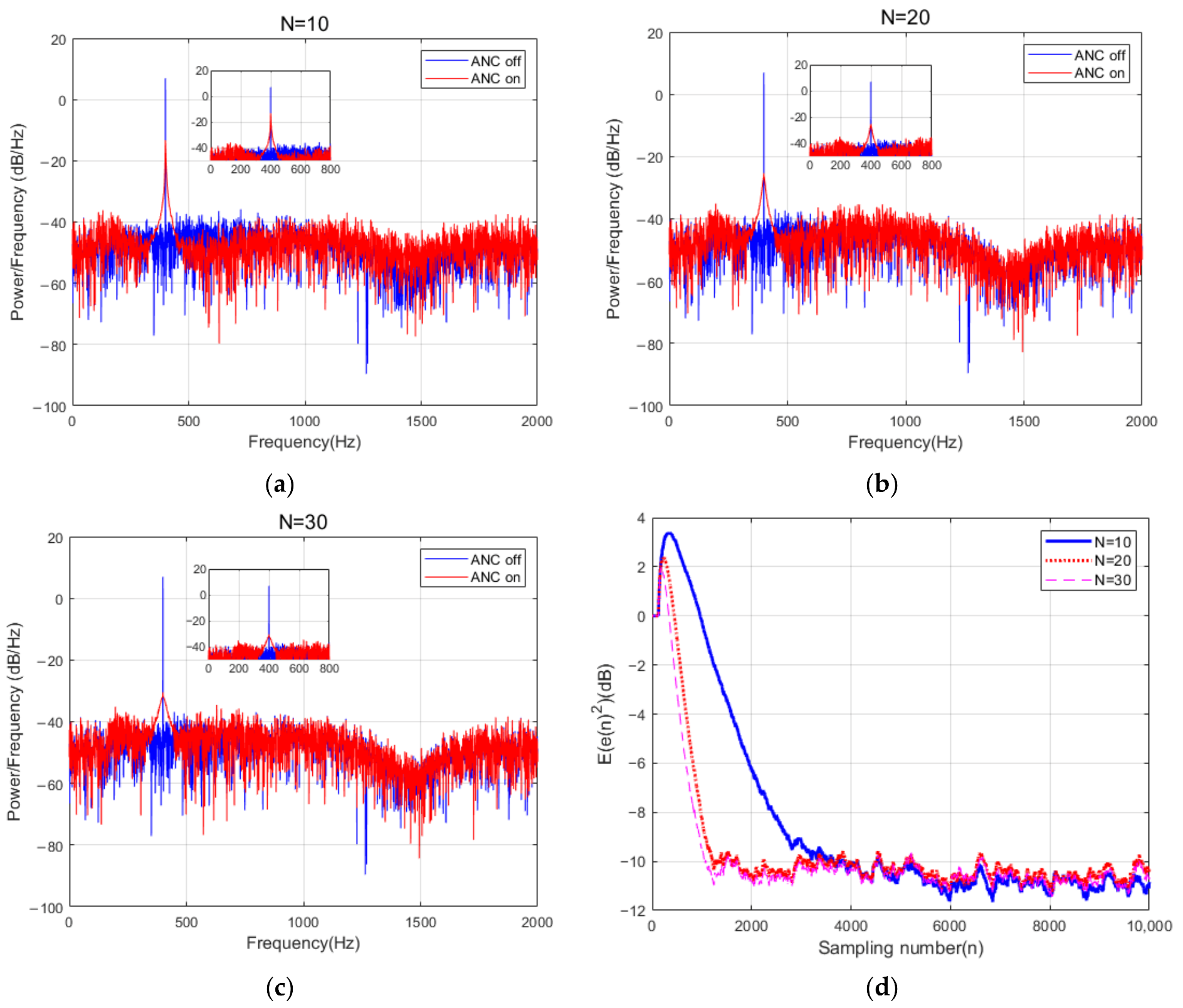
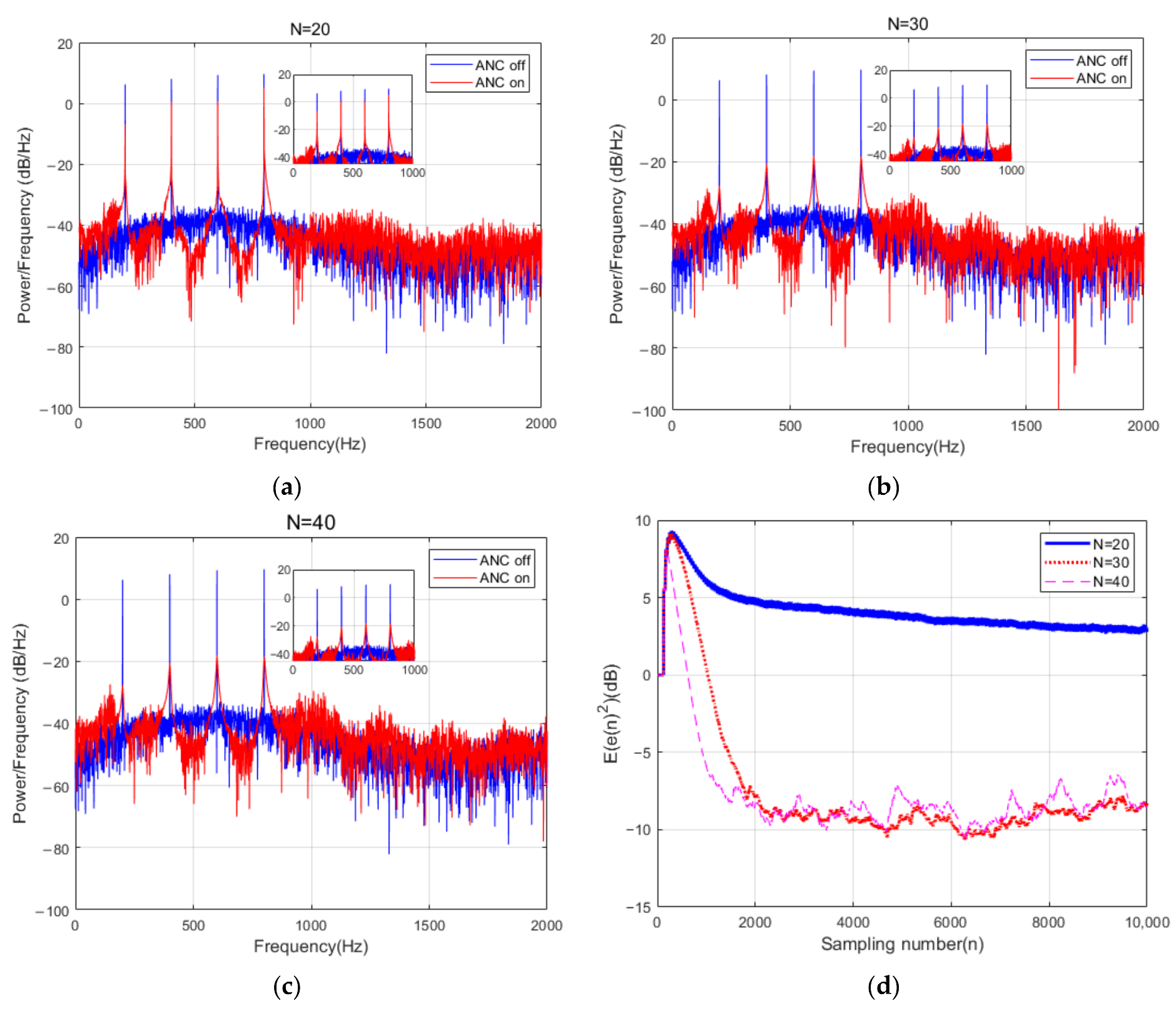
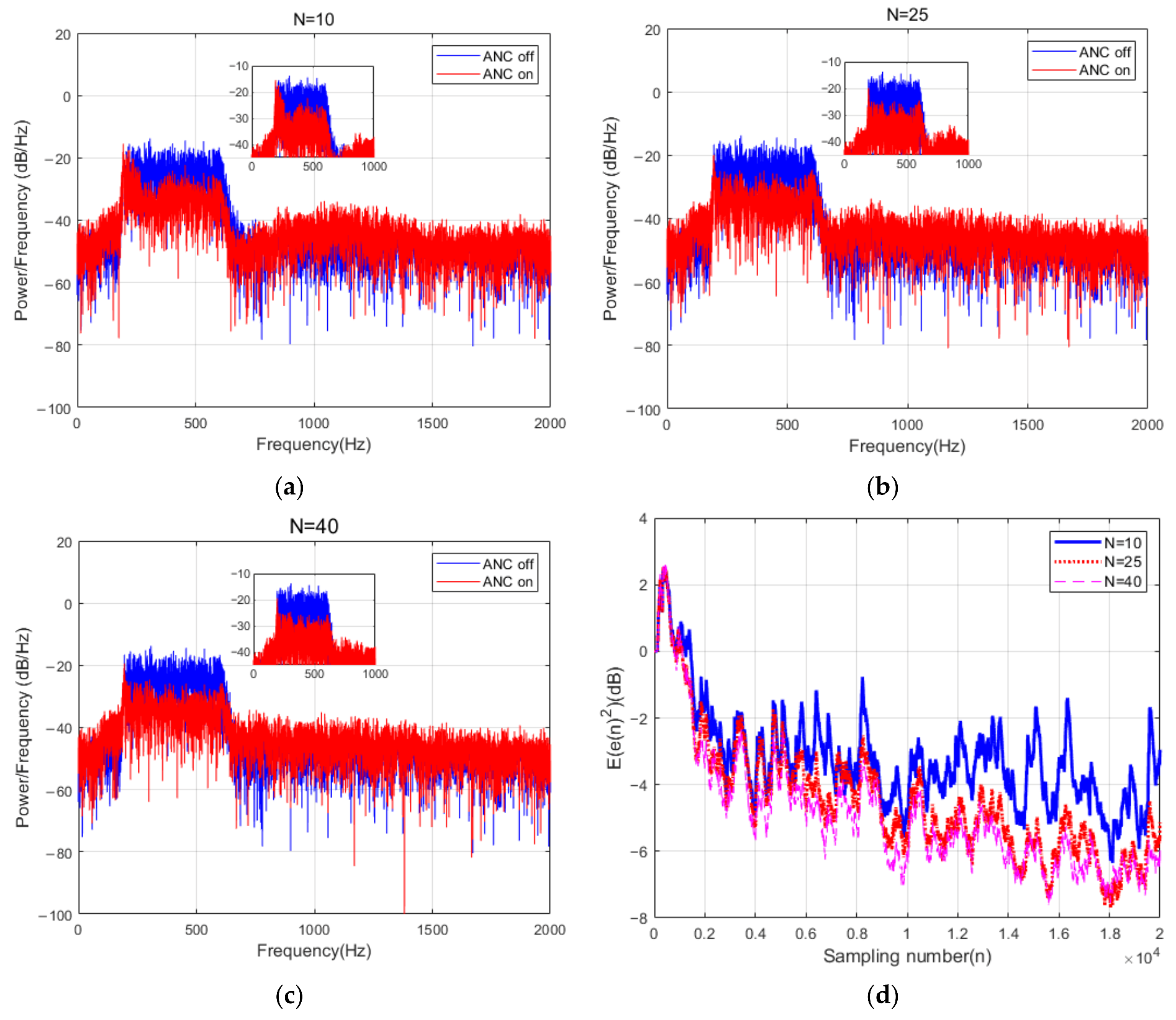
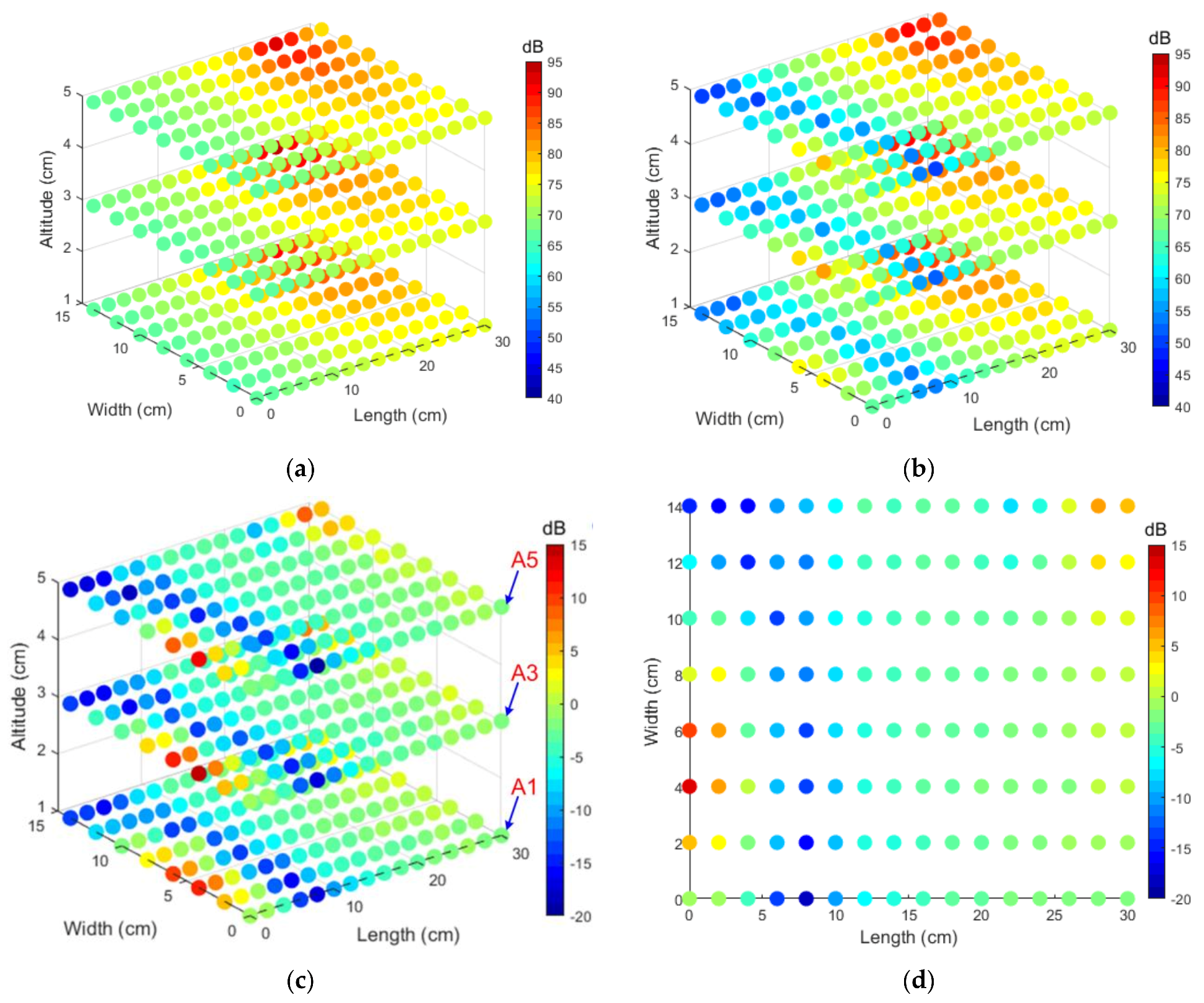
In this study, the stability of the online SPM system was analyzed in detail and the convergence conditions were derived when the relative error of the secondary path was large. The system can still converge stably at the start-up stage of the system operation or when the secondary path changes suddenly. The step-size upper bound of the ANC filter changes with the relative error of the auxiliary path, which can avoid the instability of the system caused by secondary path errors to a great extent. In addition, based on the model, a suitable step size for the ANC filter can be applied for various types of input signals. Finally, the steady-state MSE not having a closed-form expression is explained. Compared with the existing literature methods, the controller of the system is fitted online in all operating stages, without the need for offline fitting for a period of time, and when the mutation of the secondary path causes the relative error of the fitting filter to be large, the system can still have good stability. The simulation results verify the effectiveness of the model, ensure the stability of the system under different conditions, and have stronger robustness. The experimental results show that the ANC system had a noticeable noise reduction effect for different types of noise signals, and the noise reduction amount for more complex narrowband noise signals can reach 15 dB. The system can establish an effective quiet space in the local space, with an average noise reduction of approximately 15 dB and a maximum of 20 dB. These results have practical significance for other complex online secondary path modeling and local space noise reduction.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










