
Non-Contact Crack Visual Measurement System Combining Improved U-Net Algorithm and Canny Edge Detection Method with Laser Rangefinder and Camera


Abstract
:1. Introduction
2. The Problem of Crack Measurement Based on Machine Vision
2.1. Computer Vision-Based Measurement System
- (1)
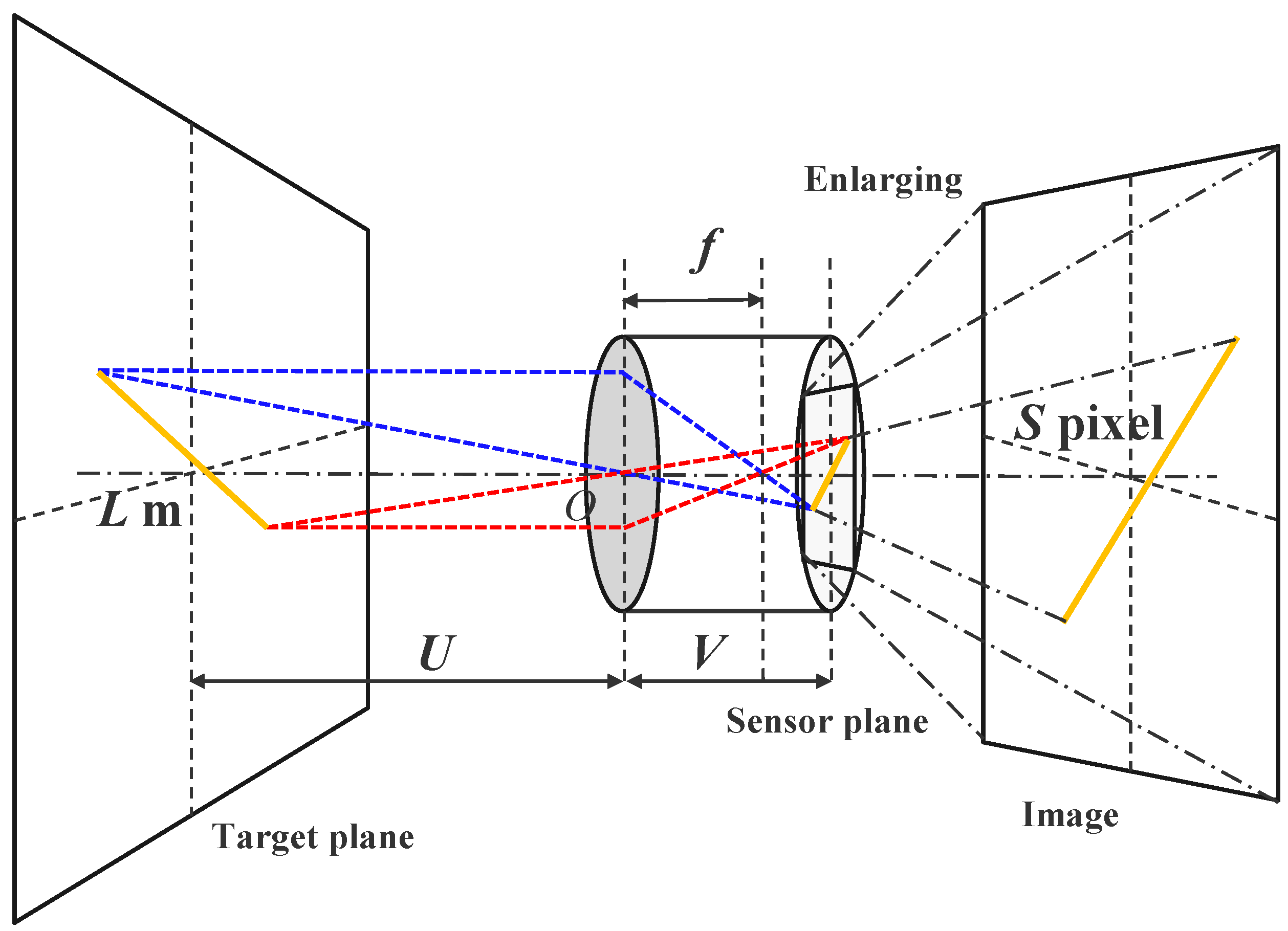
- Theoretically, the object distance is the space from the center of the lens O to the object surface, which is hard to accurately acquire and will cause the error in Equation (4). Moreover, the common range of focal length f is usually from 0.018 m to 0.2 m, while the error is usually at the centimeter scale; it can be seen that the lower the focal length f, the larger the impact, resulting in an unignorable error.
- (2)
- Digital cameras are divided into half and full frame types, and the focal length f is usually obtained manually. However, the manual focal length f is different from that in the Gaussian model and should be corrected before measuring, which may cause an incorrect physical width L in Equation (4).
- (3)
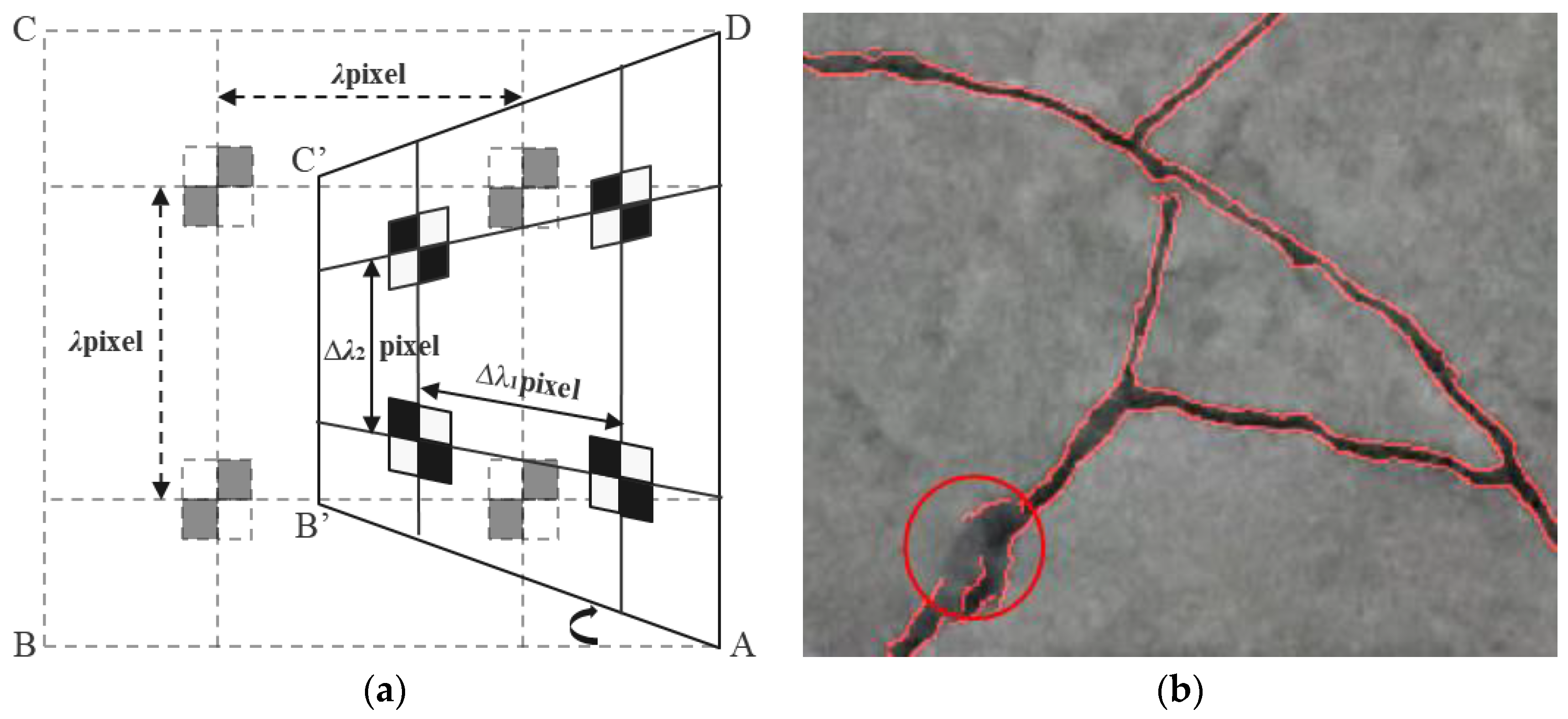
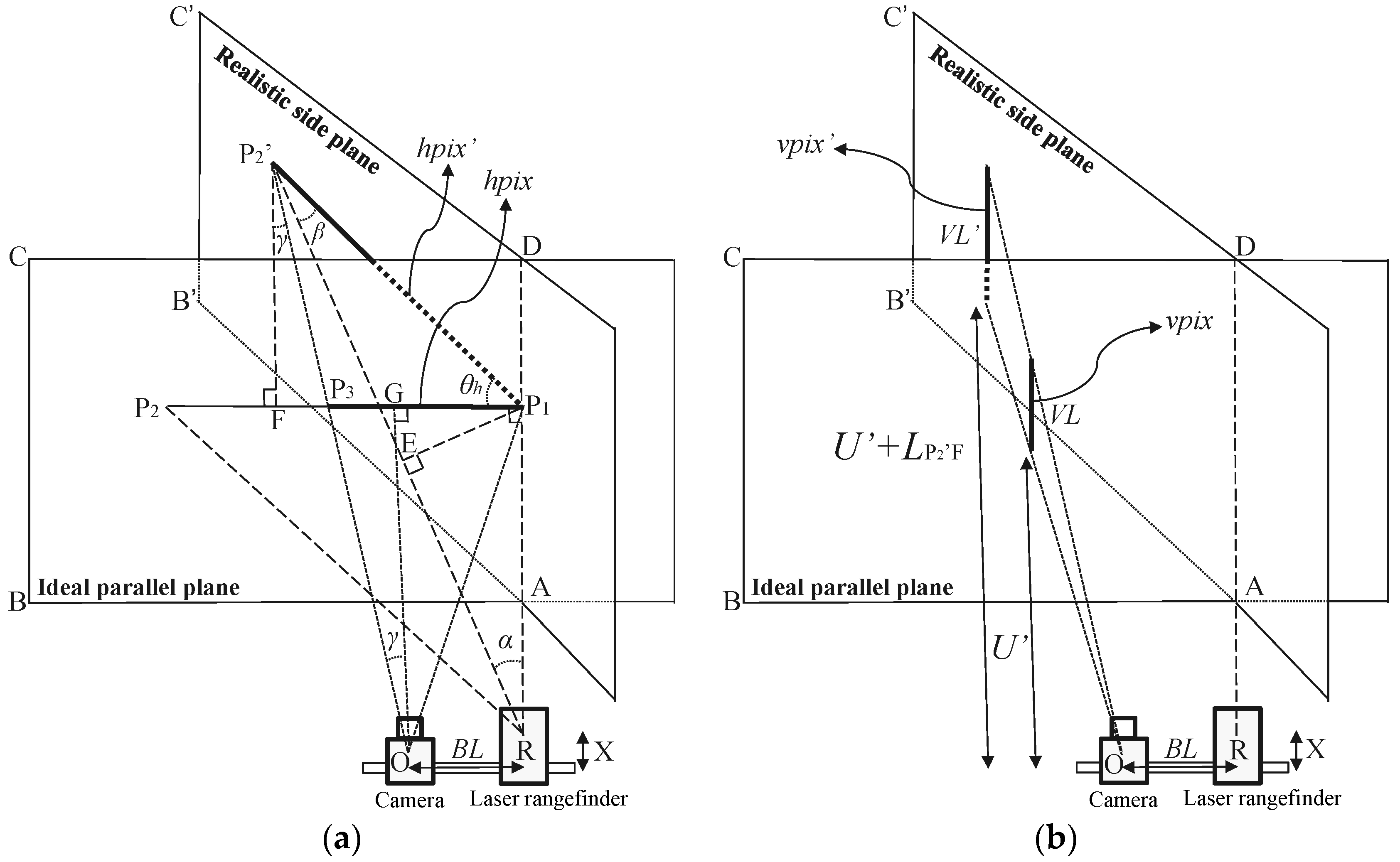
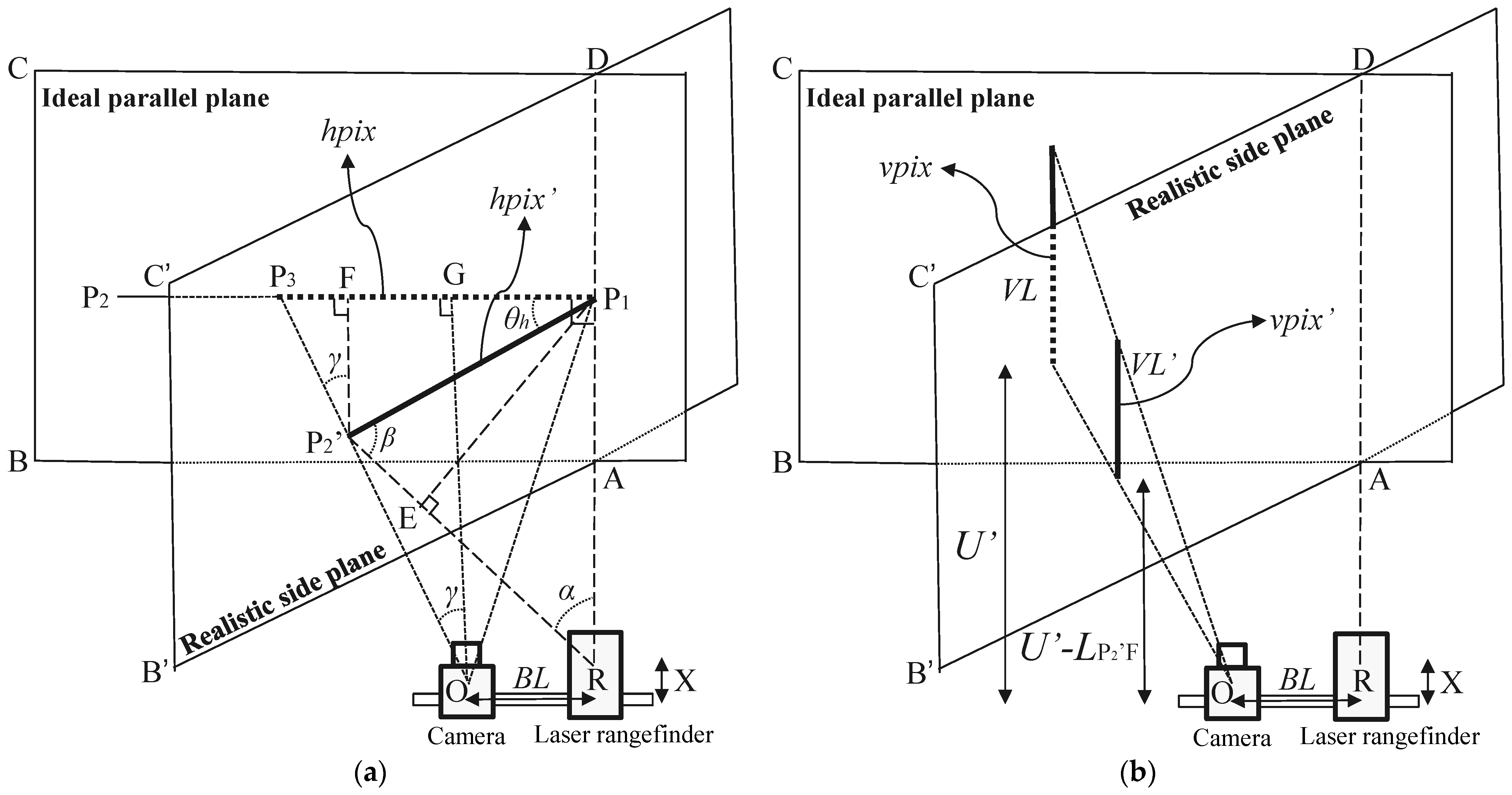
- The Gauss camera imaging model calculates the actual physical width L based on the assumption that the object plane is parallel to the image plane. However, it is difficult to achieve true vertical photographing in the practical applications, as shown in Figure 2a, where the appearance of taking photos from the side is exhibited. The pixel distance S in Figure 1 can be divided into λ pixels in the horizontal and vertical directions. According to Equation (4), the real distance L can be directly calculated. However, if the plane rotates around the AD axis, which means the photographing direction is not perpendicular to the target plane, the pixel distance λ would change as ∆λ1 pixels and ∆λ2 pixels in the horizontal and vertical directions, and the calculation method used in Equation (4) would not be satisfied. This deformation in which plane ABCD changes to plane AB’C’D would affect the measurement results.
2.2. Inaccurate Crack Identification Method
3. Crack Identification and Measurement System
3.1. Measurement System Based on Camera and Laser Rangefinder
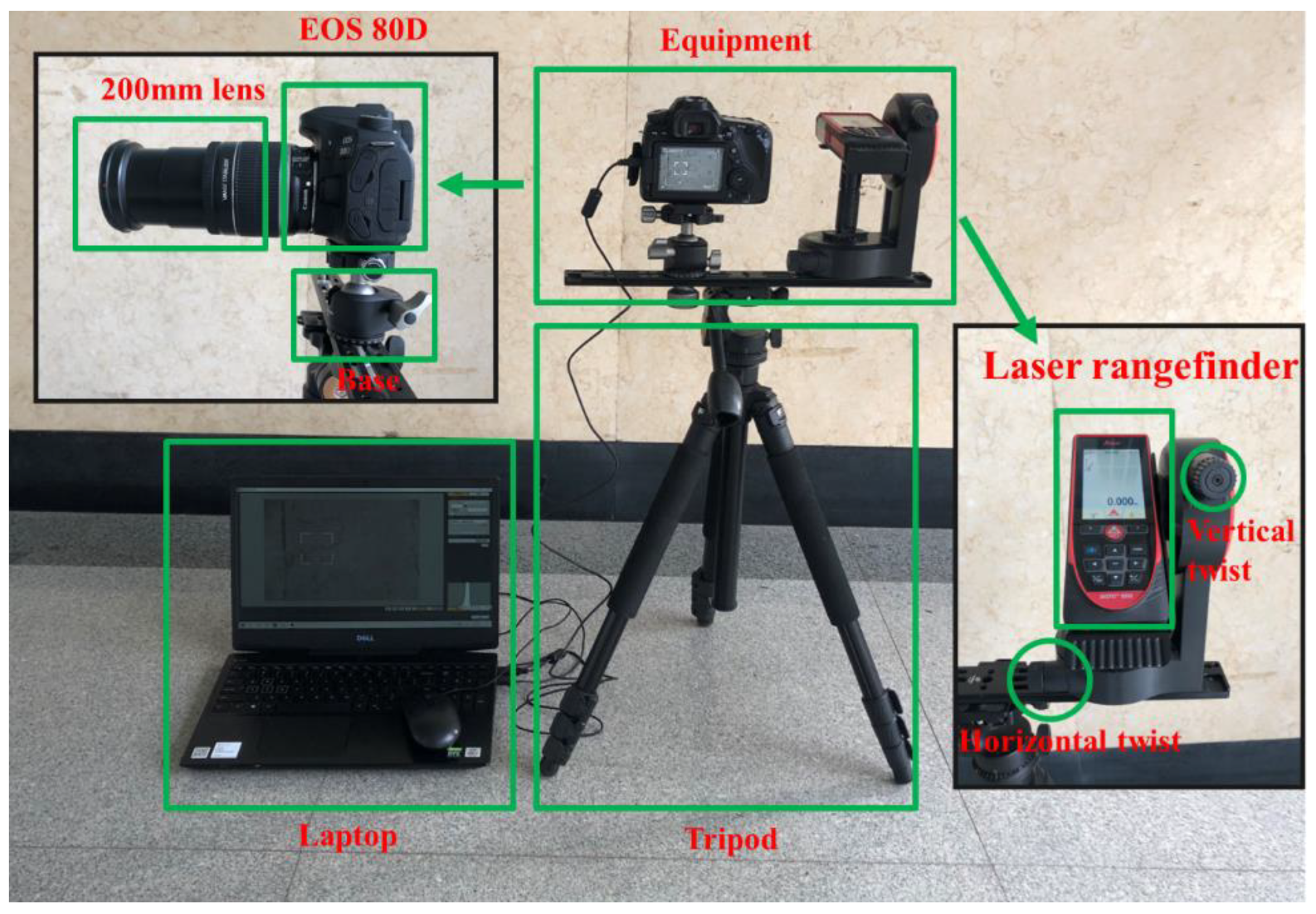
3.1.1. Description of the Proposed Equipment System
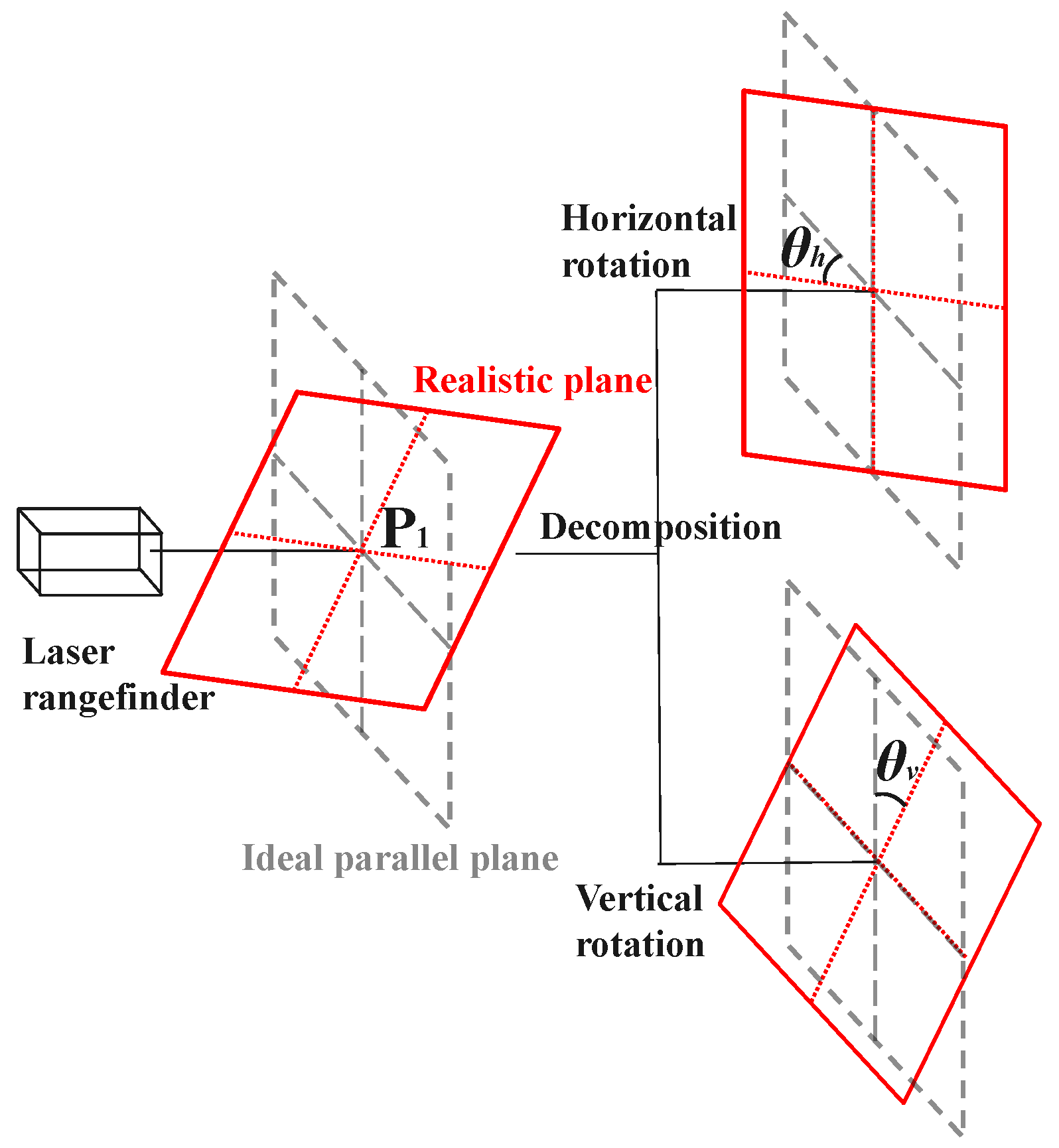
3.1.2. Geometric Transformation Formula of Pixel Length
3.2. Crack Segmentation Based on U-Net Algorithm
3.2.1. Architecture of U-Net
3.2.2. Loss Function
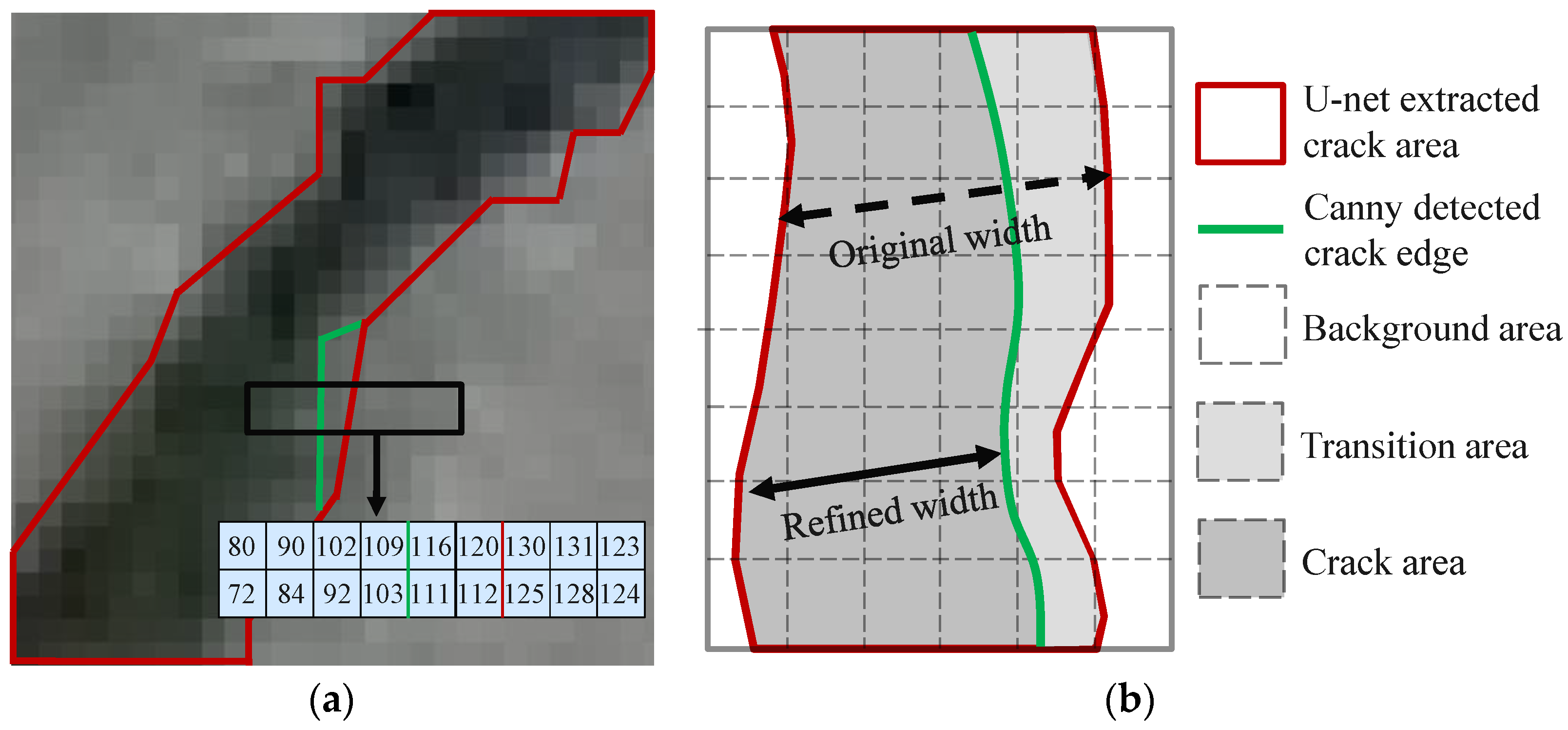
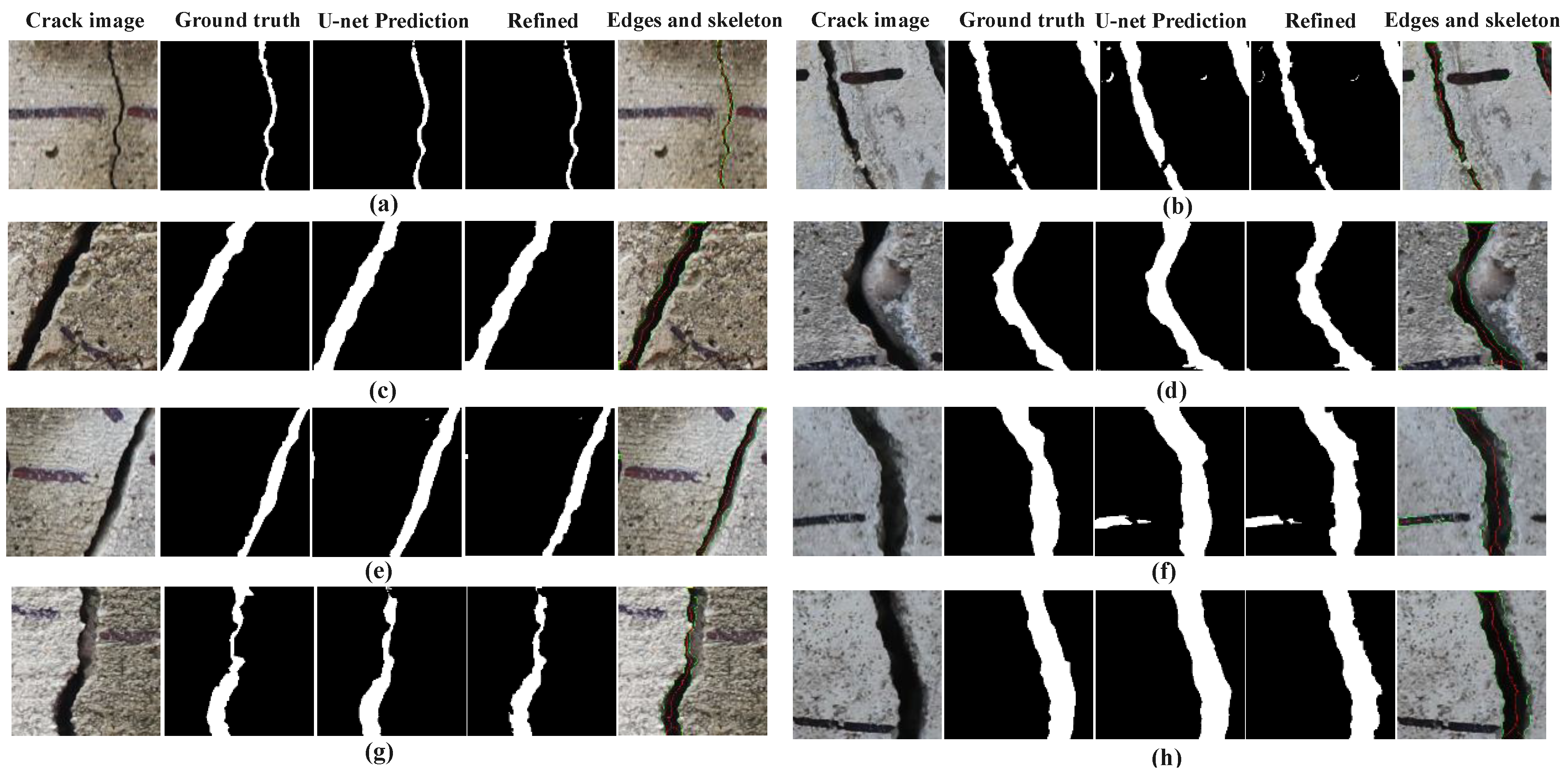
3.2.3. Edges Refined by Canny Algorithm
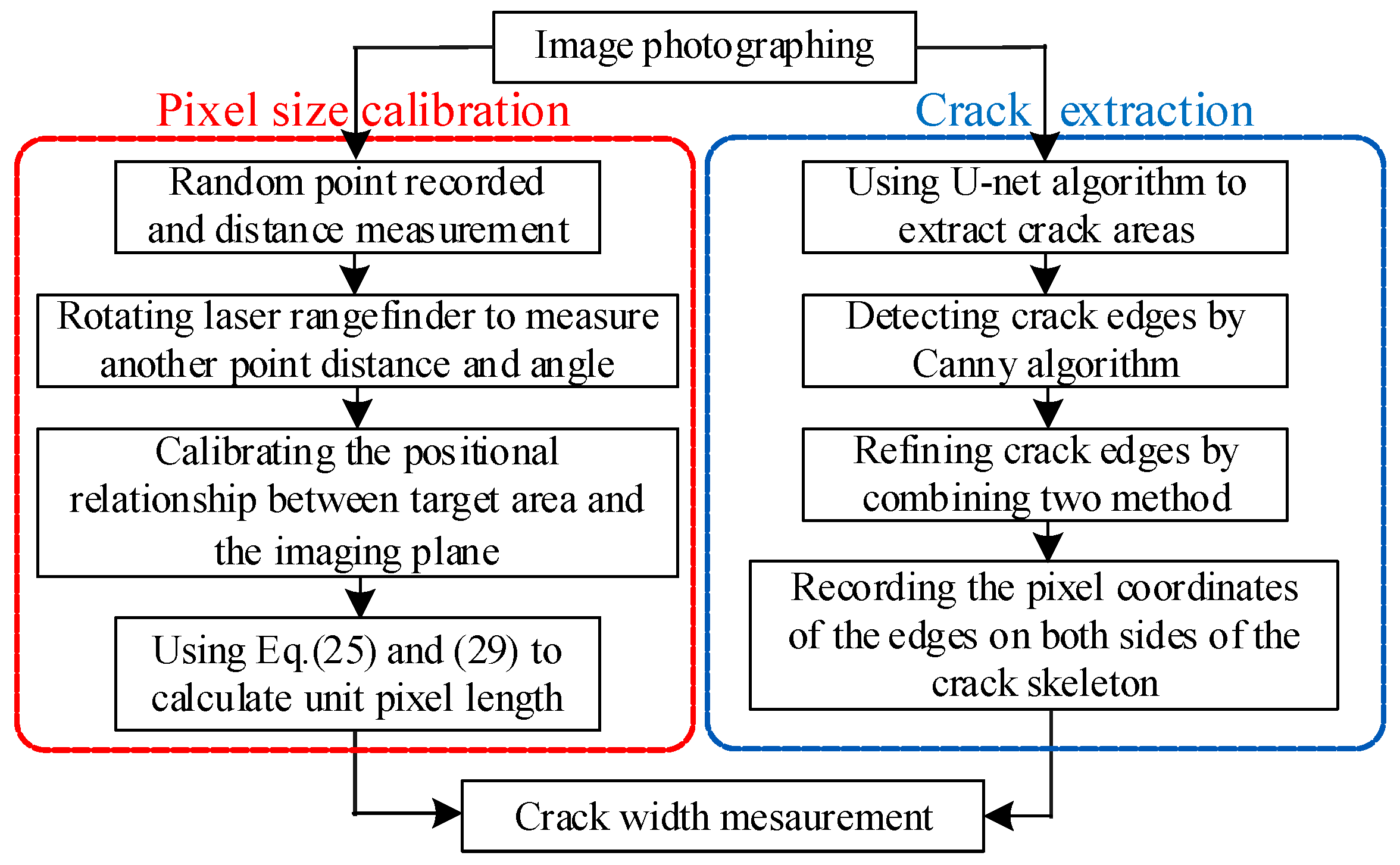
3.3. Process of Crack Measurement
4. Case Study
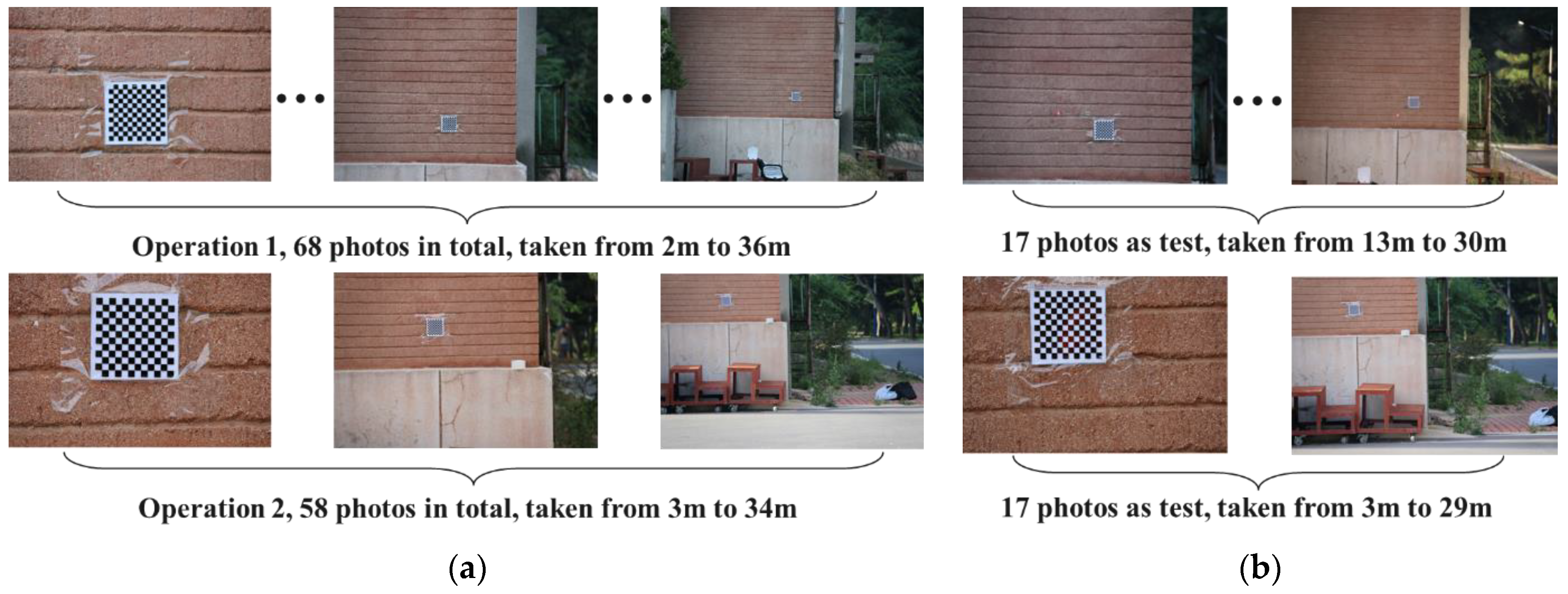
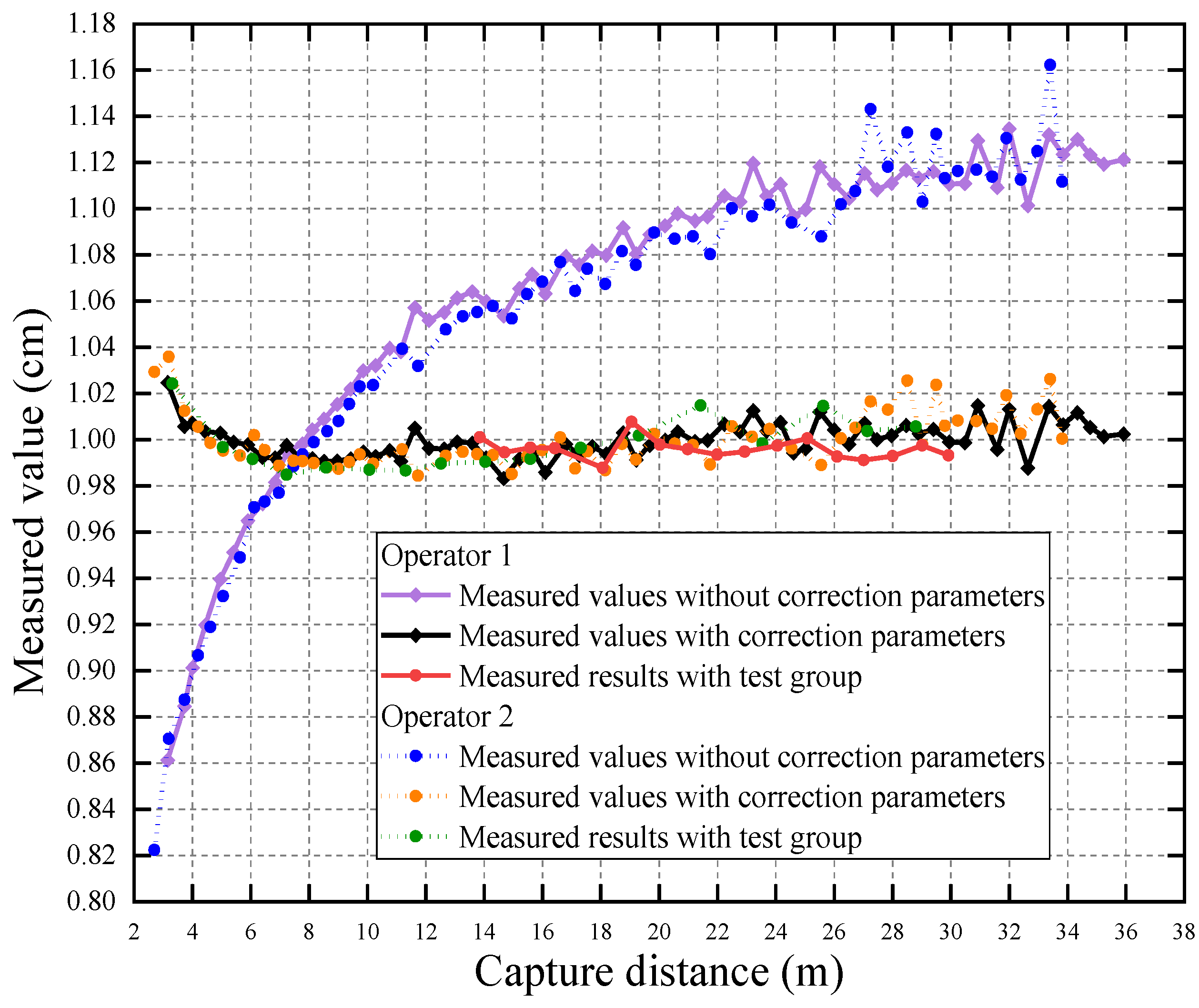
4.1. Determination of System Parameters
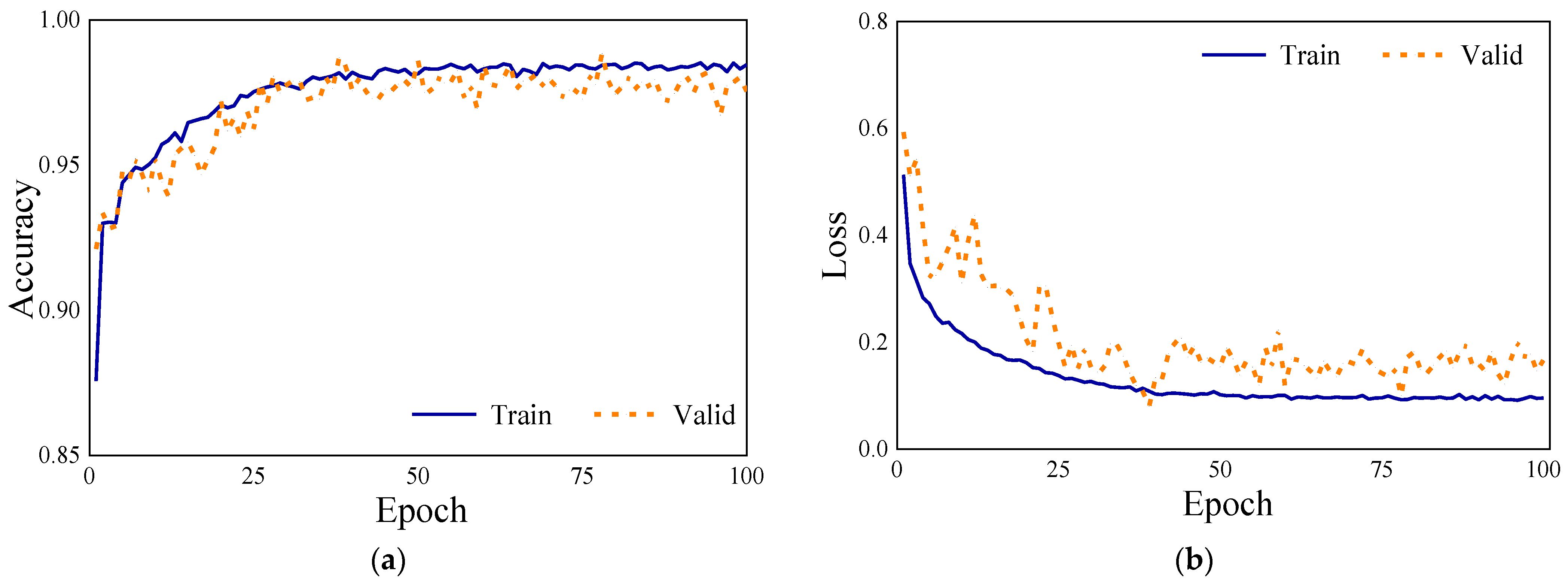
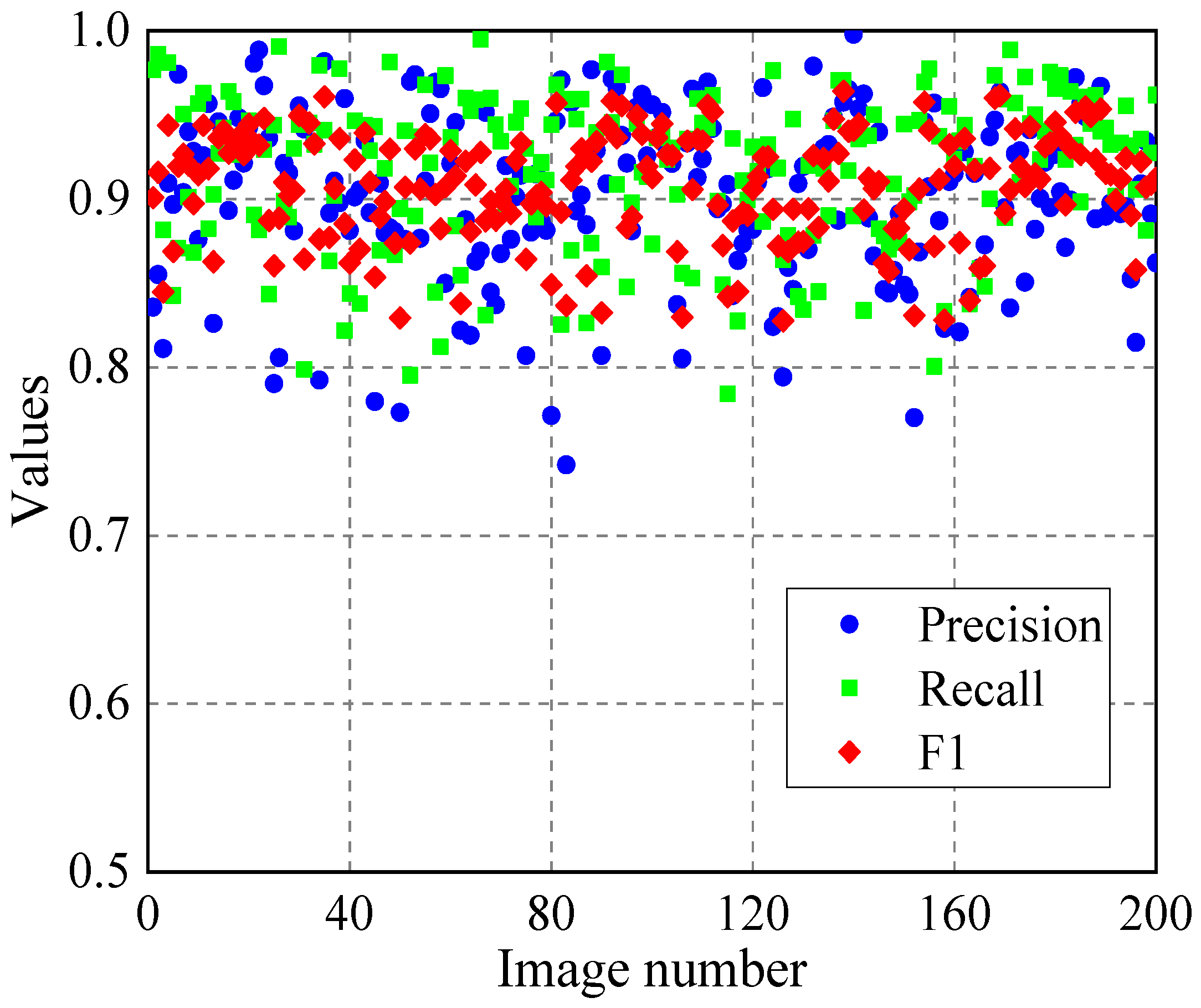
4.2. U-Net Model for Concrete Crack Segmentation
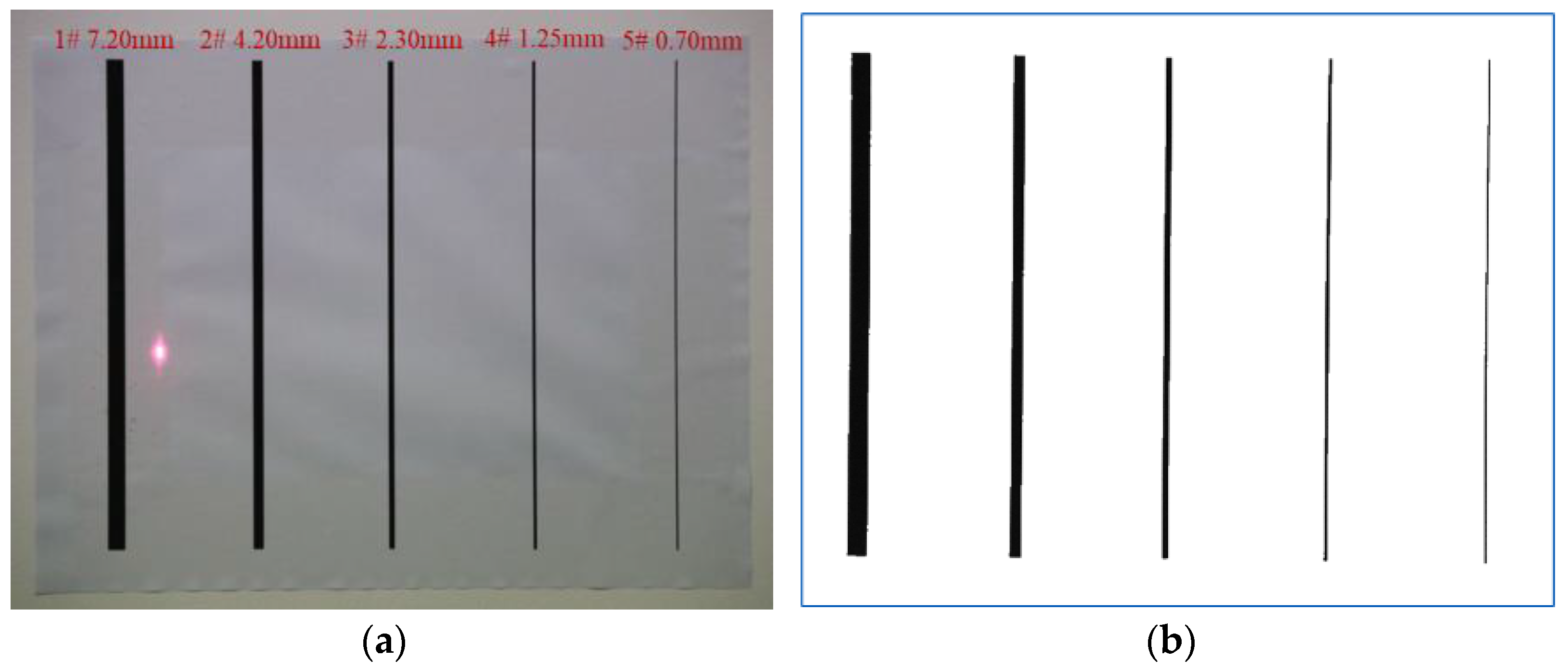
4.3. Crack Measurement Tests in Lab
4.4. Concrete Crack Detection Using the Proposed System
5. Discussion
6. Conclusions
- (1)
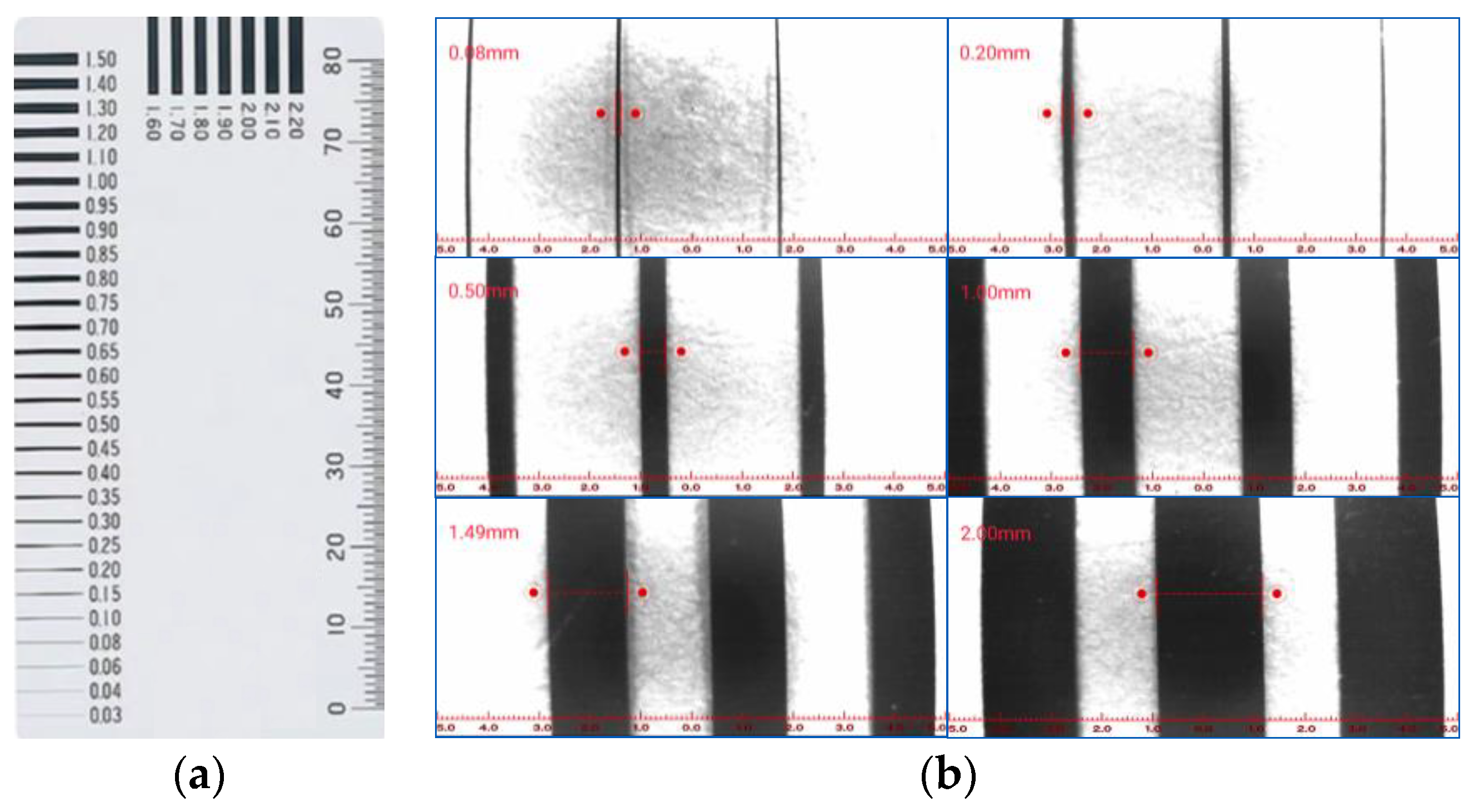
- The measurement results for standard artificial cracks prove that the capturing angle and distance can significantly impact the accuracy; since the number of pixels the target occupies is reduced, the image resolution and unit pixel size would affect measurement results.
- (2)
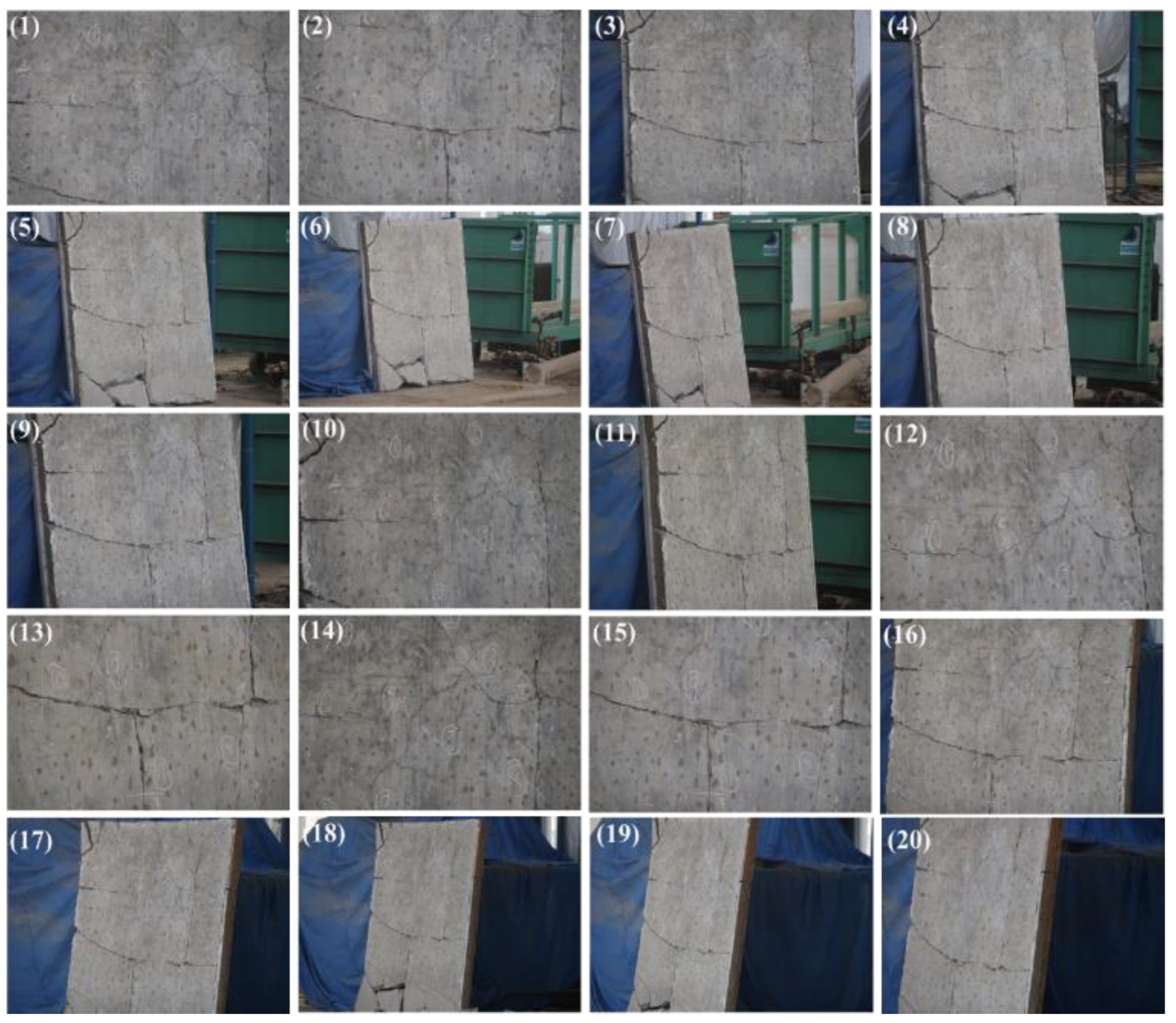
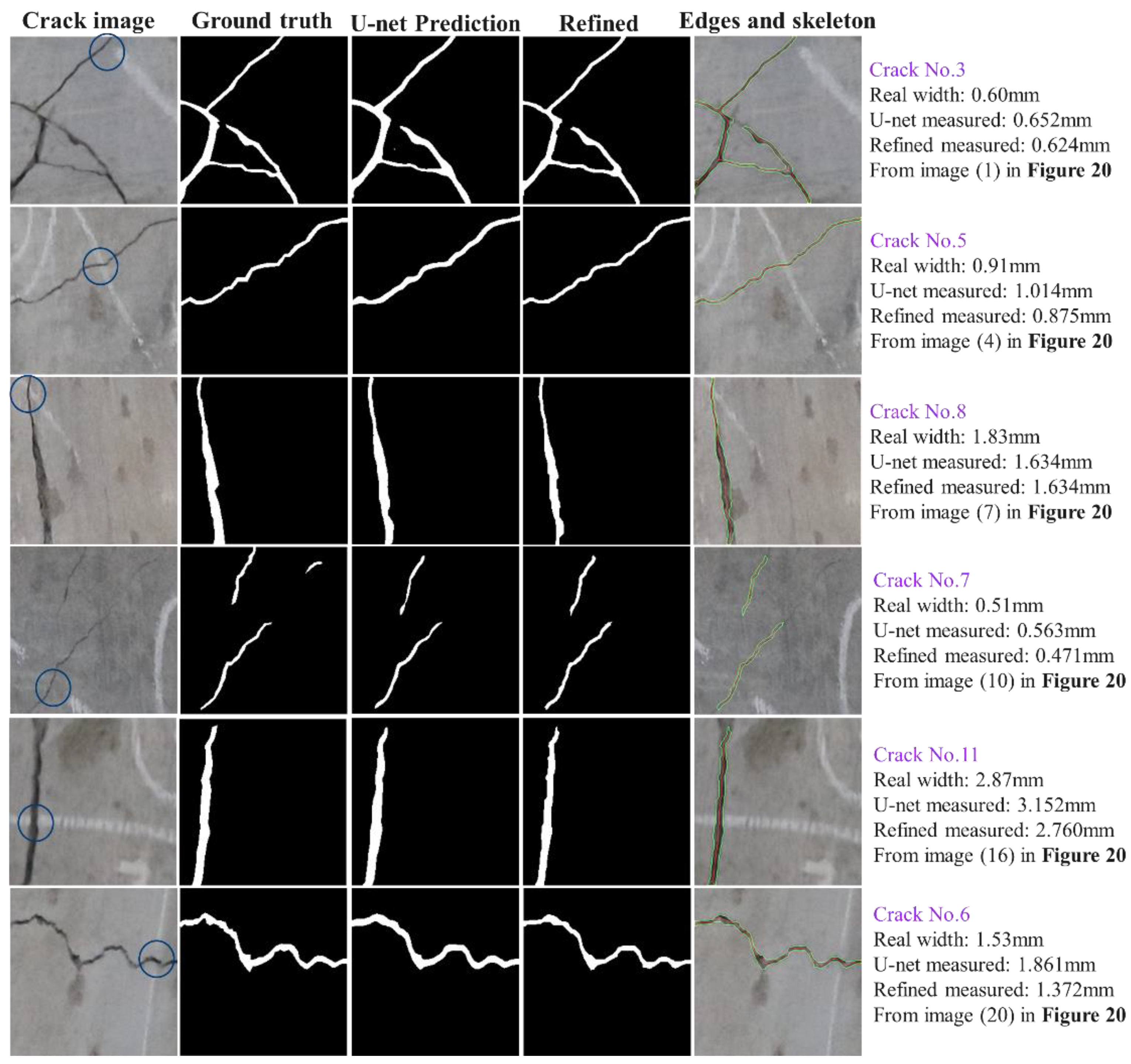
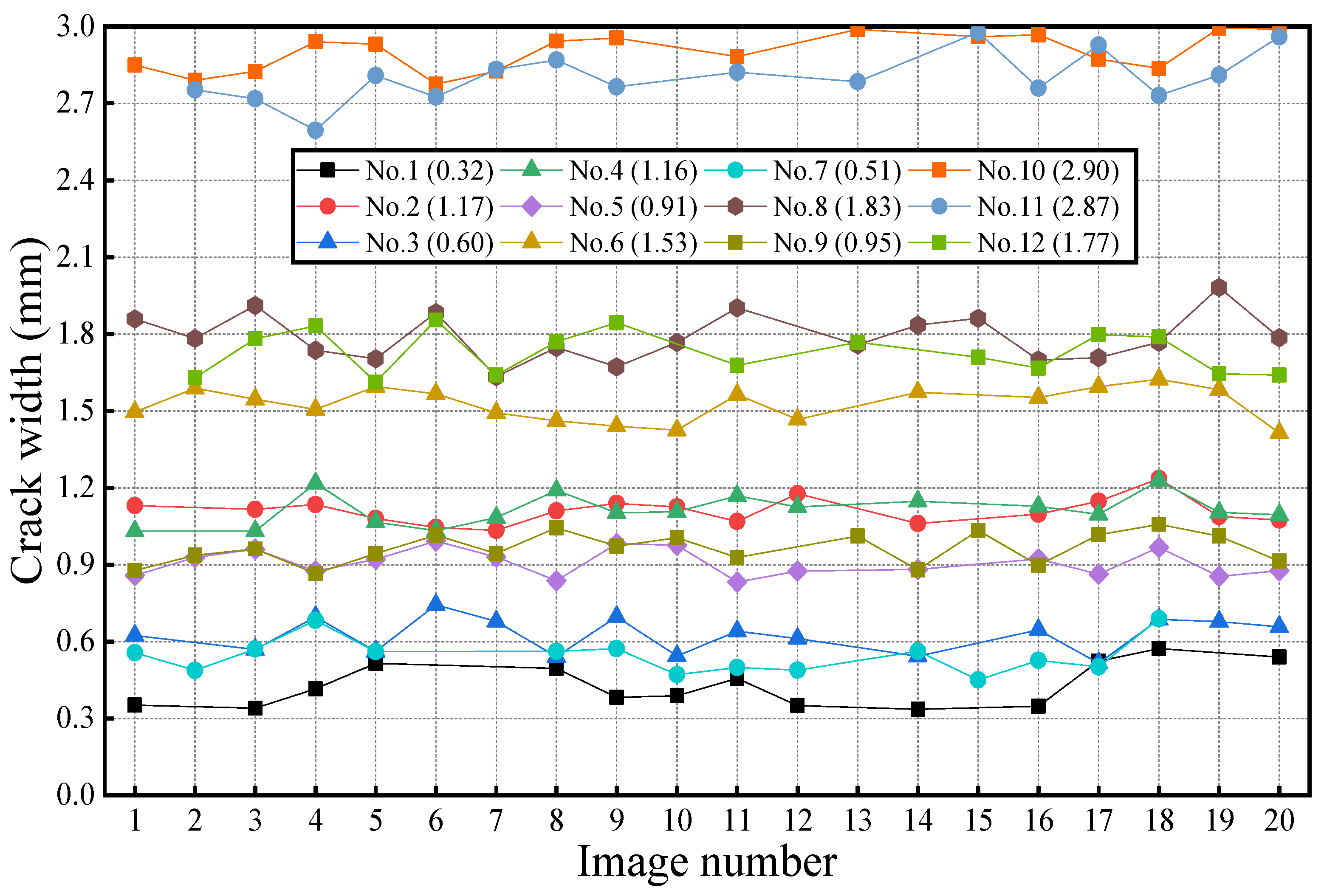
- To further analyze the influencing factors of measurement accuracy, a concrete wall in the lab is adopted to measure the crack width. With capturing distances and horizontal angle changing from 5 to 20 m and −65° to 50°, 12 cracks widths are measured, and the average absolute error is less than 0.2 mm, which proves that the crack images taken from different angles and distances can be used to accurately calculate the crack width.
- (3)
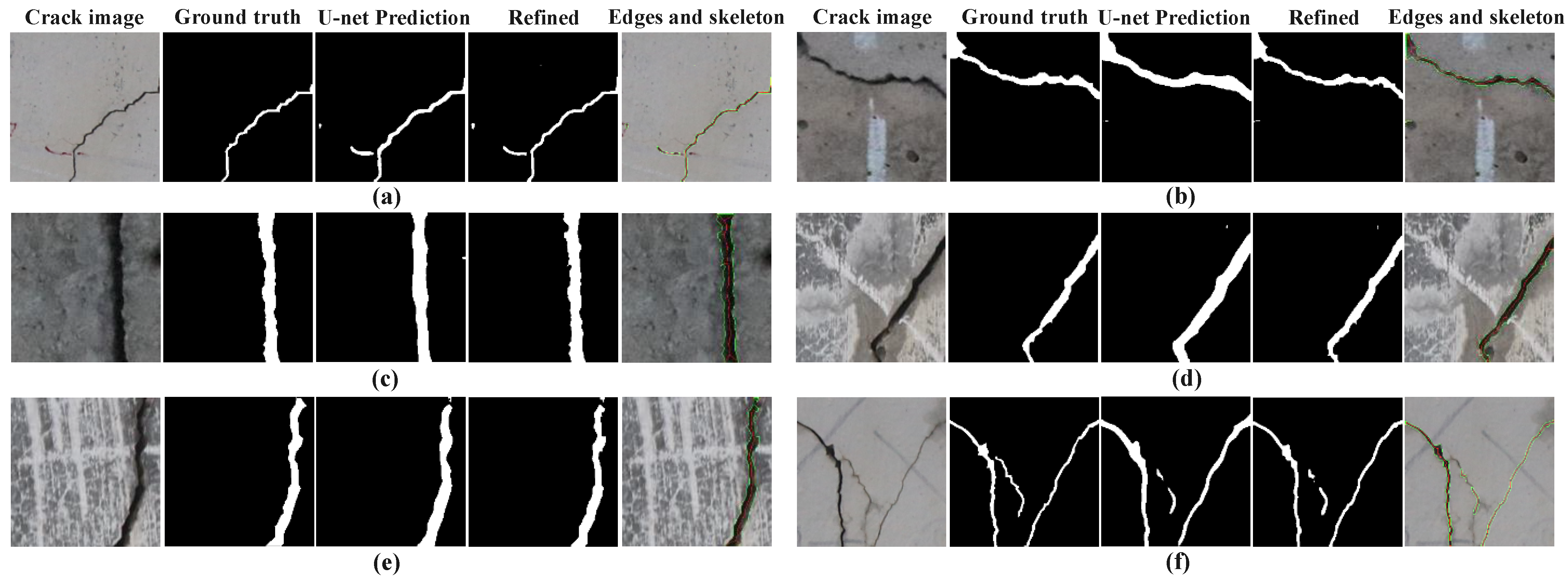
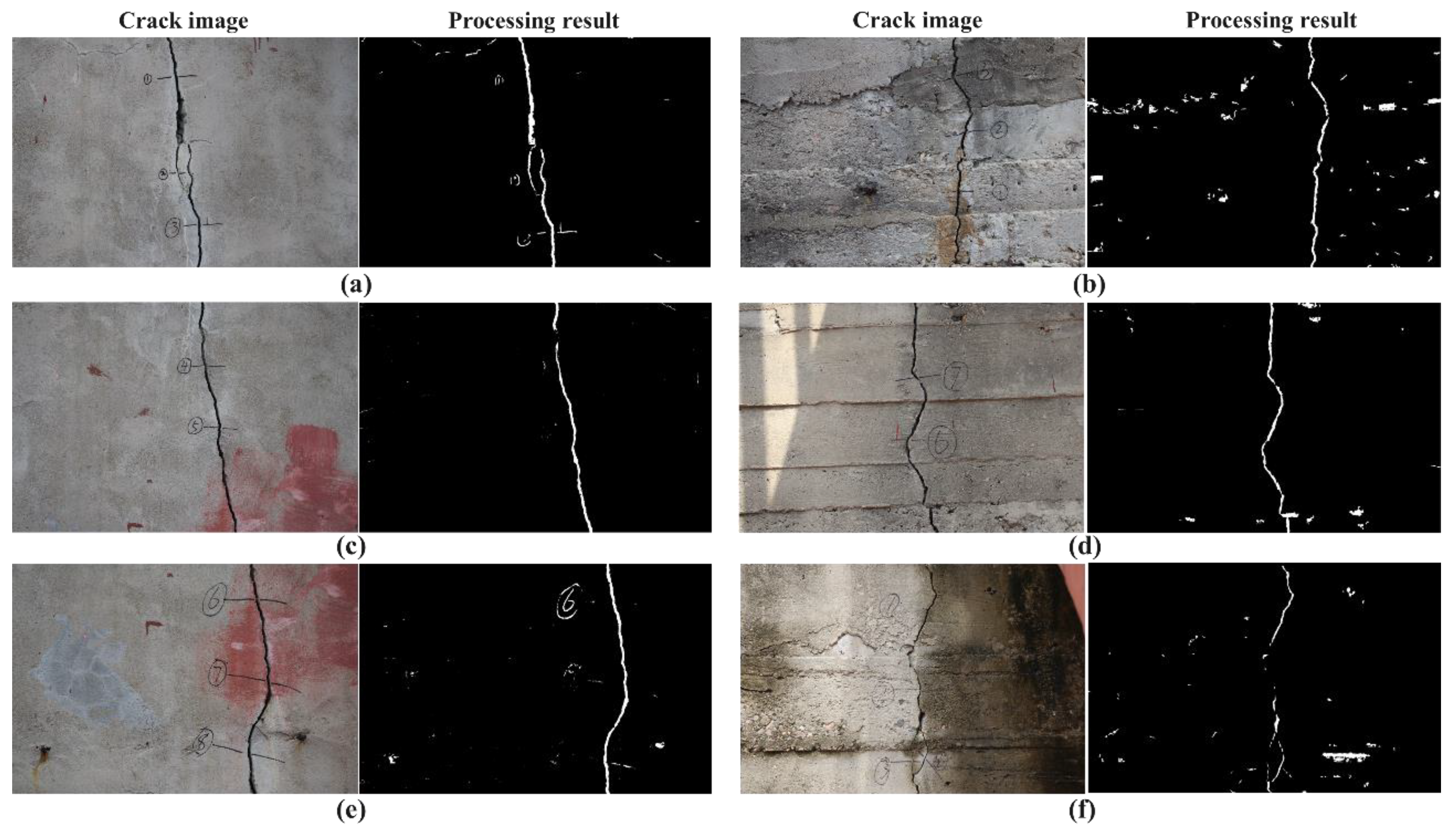
- The performances of crack extraction with different backgrounds are also analyzed on several concrete walls. The maximum error occurs at the furthest position, which is calculated as −0.15 mm measured from 15.647 m. For cracks with a small captured angle, the relative error is less than 5%, which can prove the accuracy of the segmentation algorithm.
- (4)
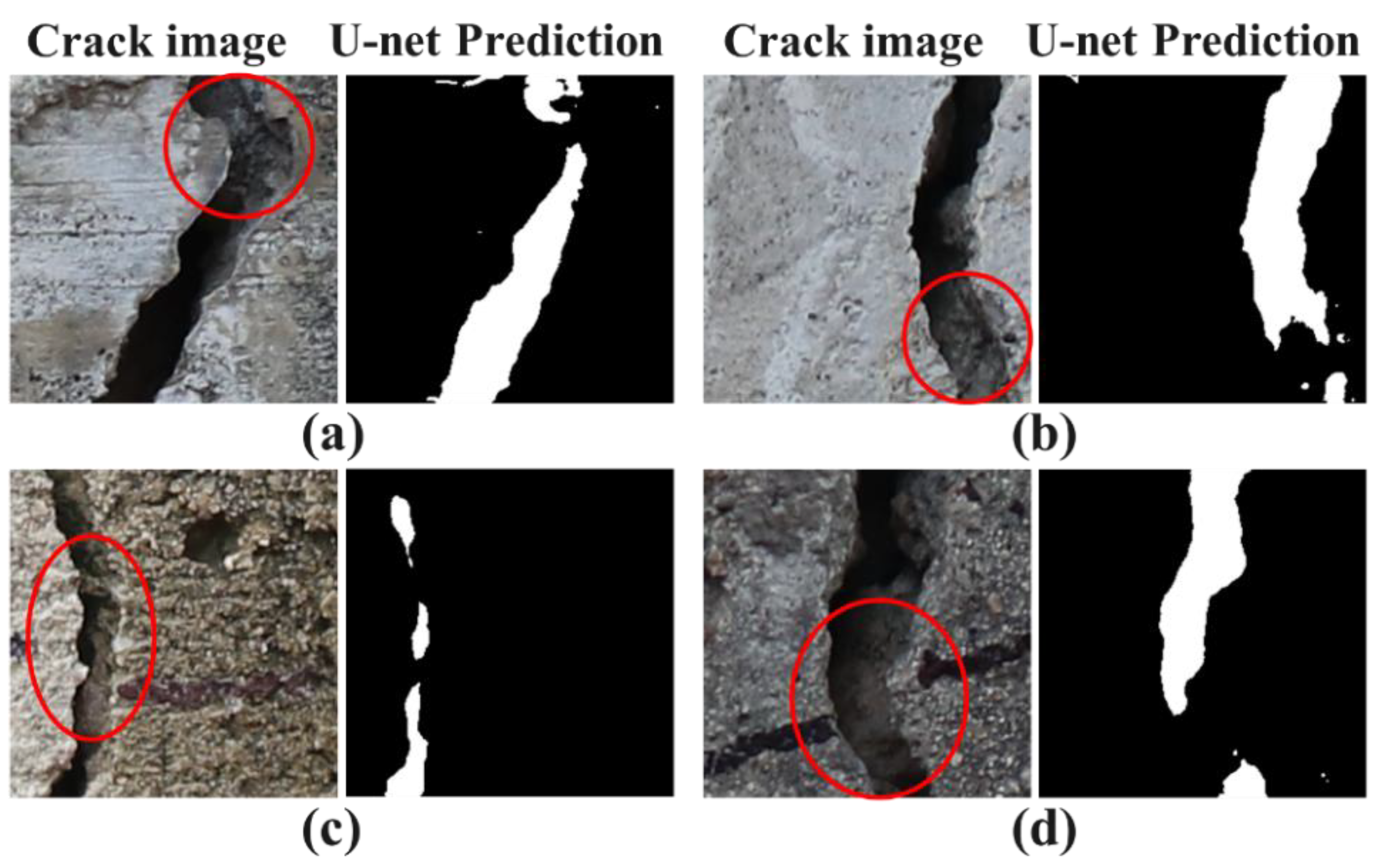
- The measurement results on the concrete dam show that the protrusions that occur deep in the crack can affect the segmentation results, and the measurement error is increased. The measurement results are accurate and robust, which means the method presented in this paper has practical and scientific novelty.
- (5)
- In general, for the equipment used in this paper, the capturing angle should not be greater than 50°, and the photographing distance should be less than 30 m. The maximum measurement error obtained in this way is less than 0.3 mm. For concrete crack measurements, the performance of the camera and laser rangefinder combination system based on the improved U-net algorithm and Canny method is accurate and stable.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yang, Y.-S.; Wu, C.-L.; Hsu, T.T.; Yang, H.-C.; Lu, H.-J.; Chang, C.-C. Image analysis method for crack distribution and width estimation for reinforced concrete structures. Autom. Constr. 2018, 91, 120–132. [Google Scholar] [CrossRef]
- Liu, Y.F.; Nie, X.; Fan, J.S.; Liu, X.G. Image-based crack assessment of bridge piers using unmanned aerial vehicles and three-dimensional scene reconstruction. Comput. Civ. Infrastruct. Eng. 2020, 35, 511–529. [Google Scholar] [CrossRef]
- Amin, M.N.; Khan, K.; Ahmad, W.; Javed, M.F.; Qureshi, H.J.; Saleem, M.U.; Qadir, M.G.; Faraz, M.I. Compressive Strength Estimation of Geopolymer Composites through Novel Computational Approaches. Polymers 2022, 14, 2128. [Google Scholar] [CrossRef]
- Kang, F.; Li, J.; Zhao, S.; Wang, Y. Structural health monitoring of concrete dams using long-term air temperature for thermal effect simulation. Eng. Struct. 2019, 180, 642–653. [Google Scholar] [CrossRef]
- Chen, X.; Li, D.; Tang, X.; Liu, Y. A three-dimensional large-deformation random finite-element study of landslide runout considering spatially varying soil. Landslides 2021, 18, 3149–3162. [Google Scholar] [CrossRef]
- Gong, J.; Zou, D.; Kong, X.; Liu, J.; Qu, Y. An approach for simulating the interaction between soil and discontinuous structure with mixed interpolation interface. Eng. Struct. 2021, 237, 112035. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Asghar, R.; Javed, M.F.; Alrowais, R.; Khalil, A.; Mohamed, A.M.; Mohamed, A.; Vatin, N.I. Predicting the Lateral Load Carrying Capacity of Reinforced Concrete Rectangular Columns: Gene Expression Programming. Materials 2022, 15, 2673. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Liu, Z.; Cao, Y.; Wang, Y.; Wang, W. Computer vision-based concrete crack detection using U-net fully convolutional networks. Autom. Constr. 2019, 104, 129–139. [Google Scholar] [CrossRef]
- Zhang, L.; Shen, J.; Zhu, B. A research on an improved Unet-based concrete crack detection algorithm. Struct. Health Monit. 2021, 20, 1864–1879. [Google Scholar] [CrossRef]
- Dung, C.V. Autonomous concrete crack detection using deep fully convolutional neural network. Autom. Constr. 2019, 99, 52–58. [Google Scholar] [CrossRef]
- Li, S.; Zhao, X.; Zhou, G. Automatic pixel-level multiple damage detection of concrete structure using fully convolutional network. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 616–634. [Google Scholar] [CrossRef]
- Wang, W.; Su, C. Semi-supervised semantic segmentation network for surface crack detection. Autom. Constr. 2021, 128, 103786. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention-MICCAI 2015, Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar] [CrossRef] [Green Version]
- Chen, K.; Reichard, G.; Xu, X.; Akanmu, A. Automated crack segmentation in close-range building façade inspection images using deep learning techniques. J. Build. Eng. 2021, 43, 102913. [Google Scholar] [CrossRef]
- Aslam, Y.; Santhi, N.; Ramasamy, N.; Ramar, K. Localization and segmentation of metal cracks using deep learning. J. Ambient Intell. Humaniz. Comput. 2021, 12, 4205–4213. [Google Scholar] [CrossRef]
- Sajedi, S.O.; Liang, X. Uncertainty-assisted deep vision structural health monitoring. Comput. Civ. Infrastruct. Eng. 2021, 36, 126–142. [Google Scholar] [CrossRef]
- Huyan, J.; Li, W.; Tighe, S.; Xu, Z.; Zhai, J. CrackU-net: A novel deep convolutional neural network for pixelwise pavement crack detection. Struct. Control Health Monit. 2020, 27, e2551. [Google Scholar] [CrossRef]
- Kong, S.-Y.; Fan, J.-S.; Liu, Y.-F.; Wei, X.-C.; Ma, X.-W. Automated crack assessment and quantitative growth monitoring. Comput. Aided. Civ. Infrastruct. Eng. 2021, 36, 656–674. [Google Scholar] [CrossRef]
- Jiang, S.; Zhang, J. Real-time crack assessment using deep neural networks with wall-climbing unmanned aerial system. Comput. Civ. Infrastruct. Eng. 2020, 35, 549–564. [Google Scholar] [CrossRef]
- Dias-Da-Costa, D.; Valença, J.; Júlio, E.; Araújo, H. Crack propagation monitoring using an image deformation approach. Struct. Control Health Monit. 2017, 24, e1973. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Kang, F.; Li, J.; Ma, C. Structural health monitoring and inspection of dams based on UAV photogrammetry with image 3D reconstruction. Autom. Constr. 2021, 130, 103832. [Google Scholar] [CrossRef]
- Perry, B.J.; Guo, Y. A portable three-component displacement measurement technique using an unmanned aerial vehicle (UAV) and computer vision: A proof of concept. Measurement 2021, 176, 109222. [Google Scholar] [CrossRef]
- Farahani, B.V.; Barros, F.; Sousa, P.J.; Cacciari, P.P.; Tavares, P.J.; Futai, M.M.; Moreira, P. A coupled 3D laser scanning and digital image correlation system for geometry acquisition and deformation monitoring of a railway tunnel. Tunn. Undergr. Space Technol. 2019, 91, 102995. [Google Scholar] [CrossRef]
- Yang, Y.; Sang, X.; Yang, S.; Hou, X.; Huang, Y. High-Precision Vision Sensor Method for Dam Surface Displacement Measurement. IEEE Sens. J. 2019, 19, 12475–12481. [Google Scholar] [CrossRef]
- Rezaie, A.; Achanta, R.; Godio, M.; Beyer, K. Comparison of crack segmentation using digital image correlation measurements and deep learning. Constr. Build. Mater. 2020, 261, 120474. [Google Scholar] [CrossRef]
- Ji, X.; Miao, Z.; Kromanis, R. Vision-based measurements of deformations and cracks for RC structure tests. Eng. Struct. 2020, 212, 110508. [Google Scholar] [CrossRef]
- Valença, J.; Júlio, E. MCrack-Dam: The scale-up of a method to assess cracks on concrete dams by image processing. The case study of Itaipu Dam, at the Brazil–Paraguay border. J. Civ. Struct. Health Monit. 2018, 8, 857–866. [Google Scholar] [CrossRef]
- Hao, X.-L.; Liang, H. A multi-class support vector machine real-time detection system for surface damage of conveyor belts based on visual saliency. Measurement 2019, 146, 125–132. [Google Scholar] [CrossRef]
- Jahanshahi, M.R.; Masri, S.F. Adaptive vision-based crack detection using 3D scene reconstruction for condition assessment of structures. Autom. Constr. 2012, 22, 567–576. [Google Scholar] [CrossRef]
- Yeum, C.M.; Dyke, S.J. Vision-Based Automated Crack Detection for Bridge Inspection. Comput. Civ. Infrastruct. Eng. 2015, 30, 759–770. [Google Scholar] [CrossRef]
- Wang, H.-F.; Zhai, L.; Huang, H.; Guan, L.-M.; Mu, K.-N.; Wang, G.-P. Measurement for cracks at the bottom of bridges based on tethered creeping unmanned aerial vehicle. Autom. Constr. 2020, 119, 103330. [Google Scholar] [CrossRef]
- Ali, R.; Chuah, J.H.; Talip, M.S.A.; Mokhtar, N.; Shoaib, M.A. Structural crack detection using deep convolutional neural networks. Autom. Constr. 2022, 133, 103989. [Google Scholar] [CrossRef]
- Finn, A.; Kumar, P.; Peters, S.; O’Hehir, J. Unsupervised spectral-spatial processing of drone imagery for identification of pine seedlings. ISPRS J. Photogramm. Remote Sens. 2022, 183, 363–388. [Google Scholar] [CrossRef]
- Kromanis, R.; Kripakaran, P. A multiple camera position approach for accurate displacement measurement using computer vision. J. Civ. Struct. Health Monit. 2021, 11, 661–678. [Google Scholar] [CrossRef]
- Jin, S.; Lee, S.E.; Hong, J.-W. A vision-based approach for autonomous crack width measurement with flexible kernel. Autom. Constr. 2020, 110, 103019. [Google Scholar] [CrossRef]
- Sudre, C.H.; Li, W.; Vercauteren, T.; Ourselin, S.; Jorge Cardoso, M. Generalised dice overlap as a deep learning loss function for highly unbalanced segmentations. In Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support; Springer: Cham, Switzerland, 2017; pp. 240–248. [Google Scholar] [CrossRef] [Green Version]
- Konig, J.; Jenkins, M.D.; Barrie, P.; Mannion, M.; Morison, G. A Convolutional Neural Network for Pavement Surface Crack Segmentation Using Residual Connections and Attention Gating. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 26 August 2019; pp. 1460–1464. [Google Scholar] [CrossRef] [Green Version]
- Adhikari, R.; Moselhi, O.; Bagchi, A. Image-based retrieval of concrete crack properties for bridge inspection. Autom. Constr. 2014, 39, 180–194. [Google Scholar] [CrossRef]
- Li, G.; Zhao, X.; Du, K.; Ru, F.; Zhang, Y. Recognition and evaluation of bridge cracks with modified active contour model and greedy search-based support vector machine. Autom. Constr. 2017, 78, 51–61. [Google Scholar] [CrossRef]
- Oh, J.-K.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.-J.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with machine vision. Autom. Constr. 2009, 18, 929–941. [Google Scholar] [CrossRef]
- Li, G.; He, S.; Ju, Y.; Du, K. Long-distance precision inspection method for bridge cracks with image processing. Autom. Constr. 2014, 41, 83–95. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Correction | AEmean (cm) | RMSE (cm) |
|---|---|---|
| Values without correction parameters | 0.0538 | 0.0687 |
| Values with correction parameters | 0.0074 | 0.0097 |
| Values of test group | 0.0062 | 0.0085 |
| Dataset | Precision | Recall | F1 |
|---|---|---|---|
| Training | 0.9160 | 0.9224 | 0.9181 |
| Validation | 0.9152 | 0.9171 | 0.9147 |
| Testing | 0.9016 | 0.9164 | 0.9075 |
| No | Parameters | Grid Size and Error | |||
|---|---|---|---|---|---|
| Distance U (m) | Horizontal θh | Vertical θv | Average Measured (mm) | Error (mm) | |
| 1 | 20.226 | 9° | 4° | 10.078 | 0.078 |
| 2 | 8.744 | 5° | 1° | 10.083 | 0.083 |
| 3 | 15.498 | −31° | −1° | 9.784 | −0.216 |
| 4 | 18.226 | 7° | 4° | 10.076 | 0.076 |
| 5 | 19.167 | −13° | 6° | 10.118 | 0.118 |
| 6 | 30.114 | 10° | −3° | 9.817 | −0.183 |
| 7 | 22.681 | 22° | −4° | 10.200 | 0.200 |
| 8 | 25.782 | 8° | 2° | 10.158 | 0.158 |
| 9 | 14.467 | −15° | 5° | 10.109 | 0.109 |
| 10 | 9.265 | −6° | 19° | 10.191 | 0.191 |
| Parameters | Average Measurement Results (mm) | Performance Criteria | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Distance U (m) | Horizontal θh | Vertical θv | 1# (7.20) | 2# (4.20) | 3# (2.30) | 4# (1.250) | 5# (0.70) | Average Error | Maximum Error |
| 9.776 | 15° | −3° | 7.337 | 4.158 | 2.389 | 1.31 | 0.784 | 0.066 | 0.137 |
| 15.866 | 7° | 2° | 7.224 | 4.299 | 2.401 | 1.345 | 0.777 | 0.079 | 0.101 |
| 20.369 | 1° | 2° | 7.209 | 4.267 | 2.326 | 1.299 | 0.78 | 0.046 | 0.08 |
| 10.490 | −11° | −1° | 7.327 | 4.303 | 2.276 | 1.378 | 0.756 | 0.078 | 0.128 |
| 10.876 | −19° | 1° | 7.348 | 4.028 | 2.41 | 1.41 | 0.816 | 0.072 | −0.172 |
| Item | Standard | Average | AEmean | RMSE |
|---|---|---|---|---|
| Crack No. 1 | 0.32 | 0.354 | 0.147 | 0.183 |
| Crack No. 2 | 1.17 | 1.110 | 0.069 | 0.077 |
| Crack No. 3 | 0.60 | 0.626 | 0.064 | 0.071 |
| Crack No. 4 | 1.16 | 1.115 | 0.064 | 0.074 |
| Crack No. 5 | 0.91 | 0.908 | 0.046 | 0.051 |
| Crack No. 6 | 1.53 | 1.527 | 0.057 | 0.064 |
| Crack No. 7 | 0.51 | 0.431 | 0.152 | 0.244 |
| Crack No. 8 | 1.83 | 1.789 | 0.085 | 0.098 |
| Crack No. 9 | 0.95 | 0.964 | 0.052 | 0.060 |
| Crack No. 10 | 2.90 | 2.902 | 0.065 | 0.072 |
| Crack No. 11 | 2.87 | 2.803 | 0.099 | 0.117 |
| Crack No. 12 | 1.77 | 1.729 | 0.076 | 0.092 |
| Item | Absolute Error Average | Maximum Absolute Error | R2 |
|---|---|---|---|
| Image 1 | 0.0508 | 0.1290 | 0.9948 |
| Image 2 | 0.0659 | 0.1400 | 0.9960 |
| Image 3 | 0.0578 | 0.1520 | 0.9937 |
| Image 4 | 0.0894 | 0.2750 | 0.9854 |
| Image 5 | 0.0770 | 0.1950 | 0.9877 |
| Image 6 | 0.1515 | 0.1450 | 0.9556 |
| Image 7 | 0.1352 | 0.1960 | 0.9710 |
| Image 8 | 0.0613 | 0.1760 | 0.9915 |
| Image 9 | 0.0740 | 0.1580 | 0.9912 |
| Image 10 | 0.0611 | 0.1050 | 0.9860 |
| Image 11 | 0.0550 | 0.1370 | 0.9935 |
| Image 12 | 0.0290 | 0.0630 | 0.9970 |
| Image 13 | 0.0622 | 0.0890 | 0.9912 |
| Image 14 | 0.0437 | 0.1090 | 0.9880 |
| Image 15 | 0.0672 | 0.1080 | 0.9964 |
| Image 16 | 0.0579 | 0.1310 | 0.9941 |
| Image 17 | 0.0663 | 0.2040 | 0.9894 |
| Image 18 | 0.0997 | 0.2530 | 0.9962 |
| Image 19 | 0.1372 | 0.1520 | 0.9696 |
| Image 20 | 0.1239 | 0.2200 | 0.9639 |
| No | Standard (mm) | Parameters | Crack Width and Error | ||||
|---|---|---|---|---|---|---|---|
| Distance U (m) | Horizontal θh | Vertical θv | Measured (mm) | Error (mm) | Relative Value | ||
| Crack (a) | 0.77 | 14.851 | 9° | 2° | 0.778 | −0.008 | −1.04% |
| Crack (b) | 1.30 | 6.187 | 37° | 6° | 1.169 | 0.131 | 10.08% |
| Crack (c) | 2.74 | 7.348 | 24° | 10° | 2.659 | 0.081 | 2.96% |
| Crack (d) | 3.05 | 15.647 | 25° | 3° | 2.900 | 0.150 | 4.92% |
| Crack (e) | 4.07 | 14.592 | 14° | 3° | 3.965 | 0.105 | 2.58% |
| Crack (f) | 2.11 | 14.851 | 20° | 1° | 2.098 | 0.012 | 0.57% |
| Image and Crack No. | Standard (mm) | Parameters | Crack Width and Error | ||||
|---|---|---|---|---|---|---|---|
| Distance U (m) | Horizontal θh | Vertical θv | Measured (mm) | Error (mm) | Relative Value | ||
| (a)-1 | 6.27 | 5.645 | 6° | 7° | 6.043 | 0.227 | 3.62% |
| (a)-2 | 1.34 | 1.400 | −0.06 | −4.48% | |||
| (a)-3 | 5.98 | 6.028 | −0.048 | −0.80% | |||
| (b)-1 | 5.96 | 5.675 | 5° | 8° | 6.192 | −0.232 | −3.89% |
| (b)-2 | 6.40 | 6.537 | −0.137 | −2.14% | |||
| (b)-3 | 4.85 | undetected | - | - | |||
| (c)-4 | 5.40 | 5.560 | 6° | 2° | 5.262 | 0.138 | 2.56% |
| (c)-5 | 5.06 | 4.958 | 0.102 | 2.02% | |||
| (d)-6 | 5.67 | 5.776 | 5° | 9° | 5.477 | 0.193 | 3.40% |
| (d)-7 | 4.03 | 4.220 | −0.19 | −4.71% | |||
| (e)-6 | 5.16 | 4.962 | 8° | 3° | 5.236 | −0.076 | −1.47% |
| (e)-7 | 5.35 | 5.397 | −0.047 | −0.88% | |||
| (e)-8 | 5.15 | 5.241 | −0.091 | −1.77% | |||
| (f)-1 | 3.73 | 5.505 | 9° | 9° | 3.673 | 0.057 | 1.53% |
| (f)-2 | 3.47 | undetected | - | - | |||
| (f)-3 | 0.87 | 0.902 | −0.032 | −3.68% | |||
| (f)-4 | 2.30 | 2.266 | 0.034 | 1.48% | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Kang, F.; Li, J. Non-Contact Crack Visual Measurement System Combining Improved U-Net Algorithm and Canny Edge Detection Method with Laser Rangefinder and Camera. Appl. Sci. 2022, 12, 10651. https://doi.org/10.3390/app122010651
Zhao S, Kang F, Li J. Non-Contact Crack Visual Measurement System Combining Improved U-Net Algorithm and Canny Edge Detection Method with Laser Rangefinder and Camera. Applied Sciences. 2022; 12(20):10651. https://doi.org/10.3390/app122010651
Chicago/Turabian StyleZhao, Sizeng, Fei Kang, and Junjie Li. 2022. "Non-Contact Crack Visual Measurement System Combining Improved U-Net Algorithm and Canny Edge Detection Method with Laser Rangefinder and Camera" Applied Sciences 12, no. 20: 10651. https://doi.org/10.3390/app122010651
APA StyleZhao, S., Kang, F., & Li, J. (2022). Non-Contact Crack Visual Measurement System Combining Improved U-Net Algorithm and Canny Edge Detection Method with Laser Rangefinder and Camera. Applied Sciences, 12(20), 10651. https://doi.org/10.3390/app122010651