
Analysis and Synthesis of Architectures for Automotive Battery Management Systems



Abstract
:1. Introduction
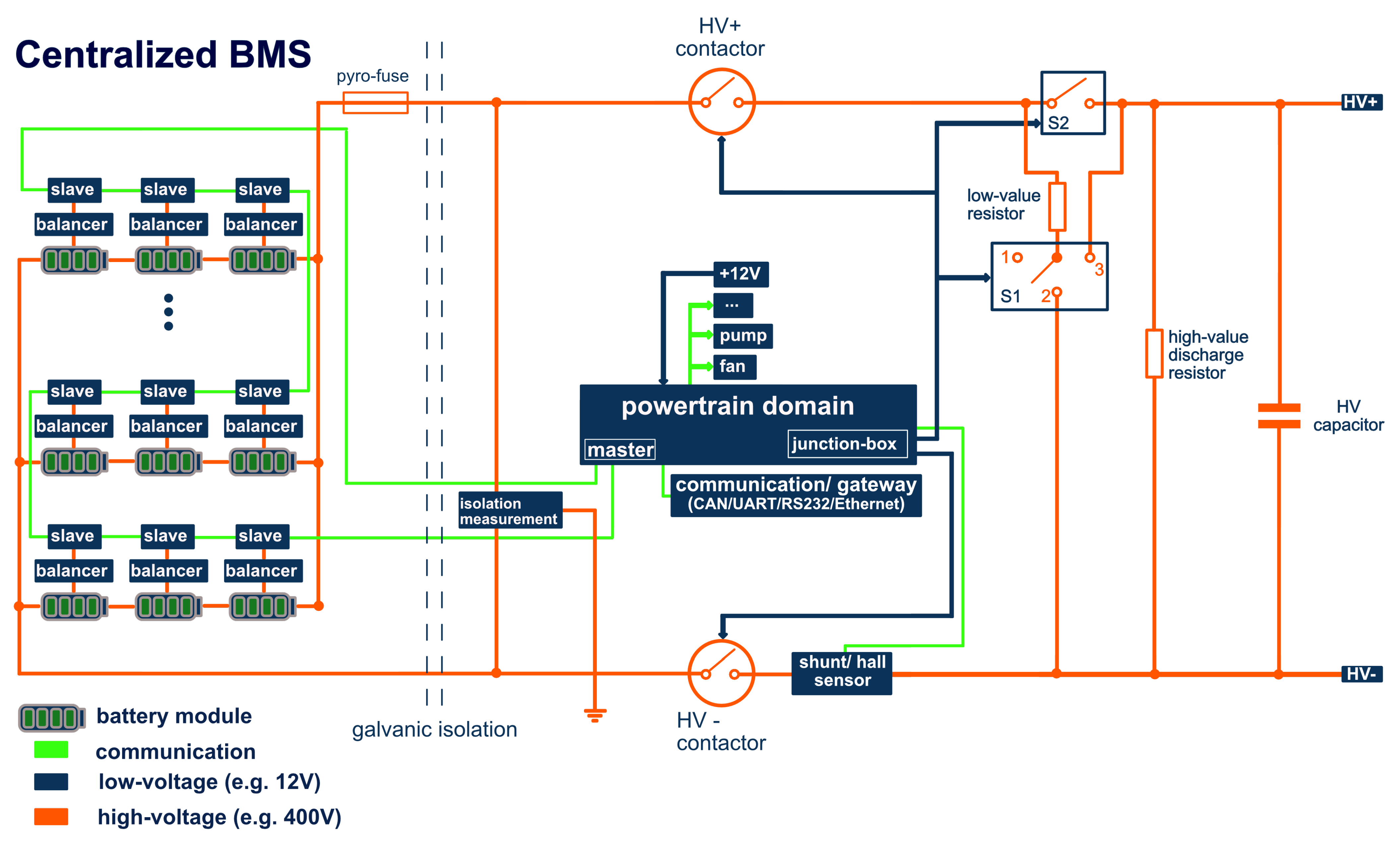
- Which features could be achieved by combining the master unit of a BMS and other EV components such as the power electronic on a centralized ECU, and which benefits or risks could occur?
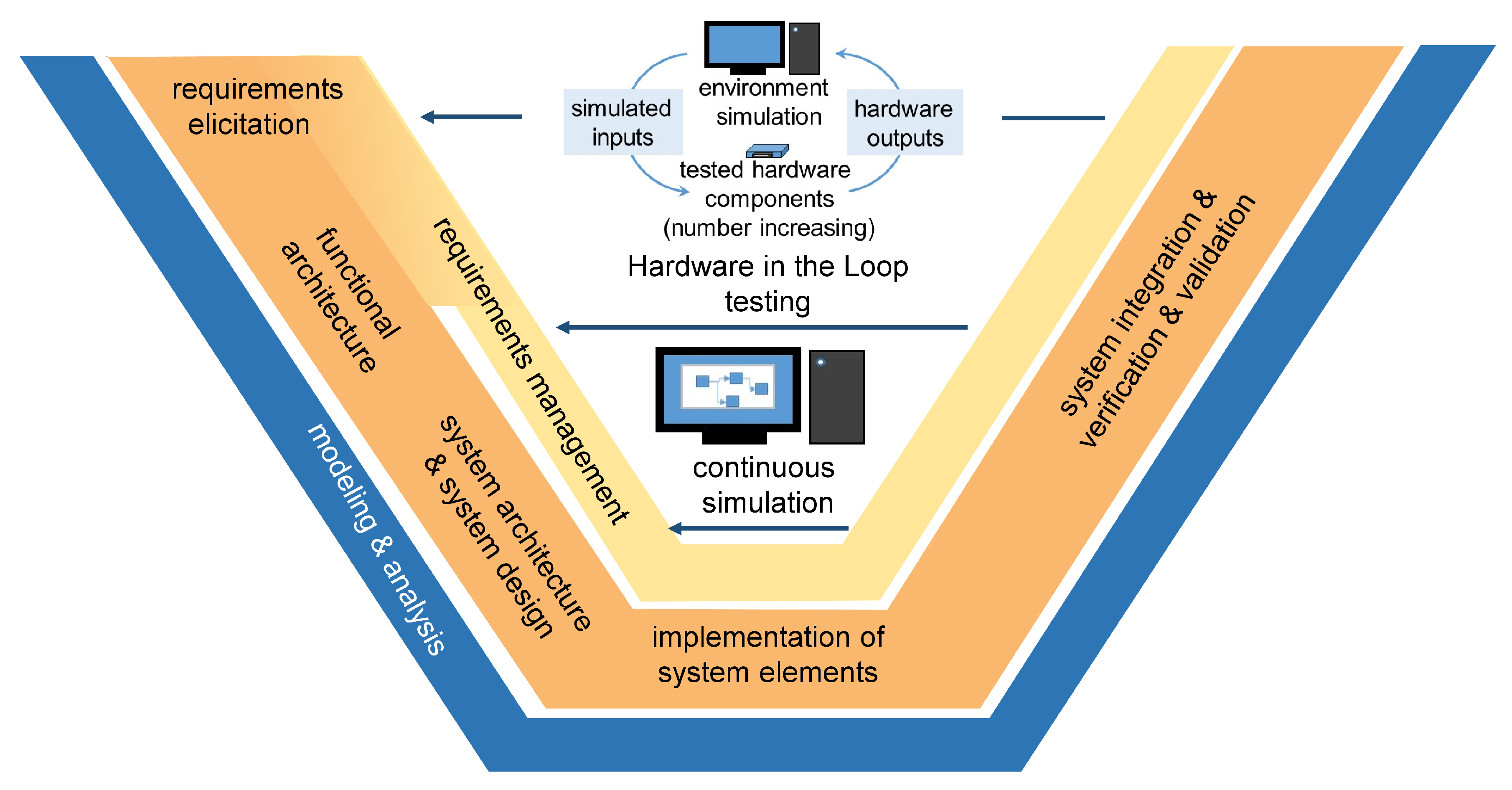
- What does a modern development process for a BMS look like?
- To what extent does a modern simulation-based process support the concept synthesis in early product development to identify benefits and risks in new centralized topologies?
2. State-of-the-Art of E/E Architectures in Vehicles, Functional Safety and Battery Management Systems
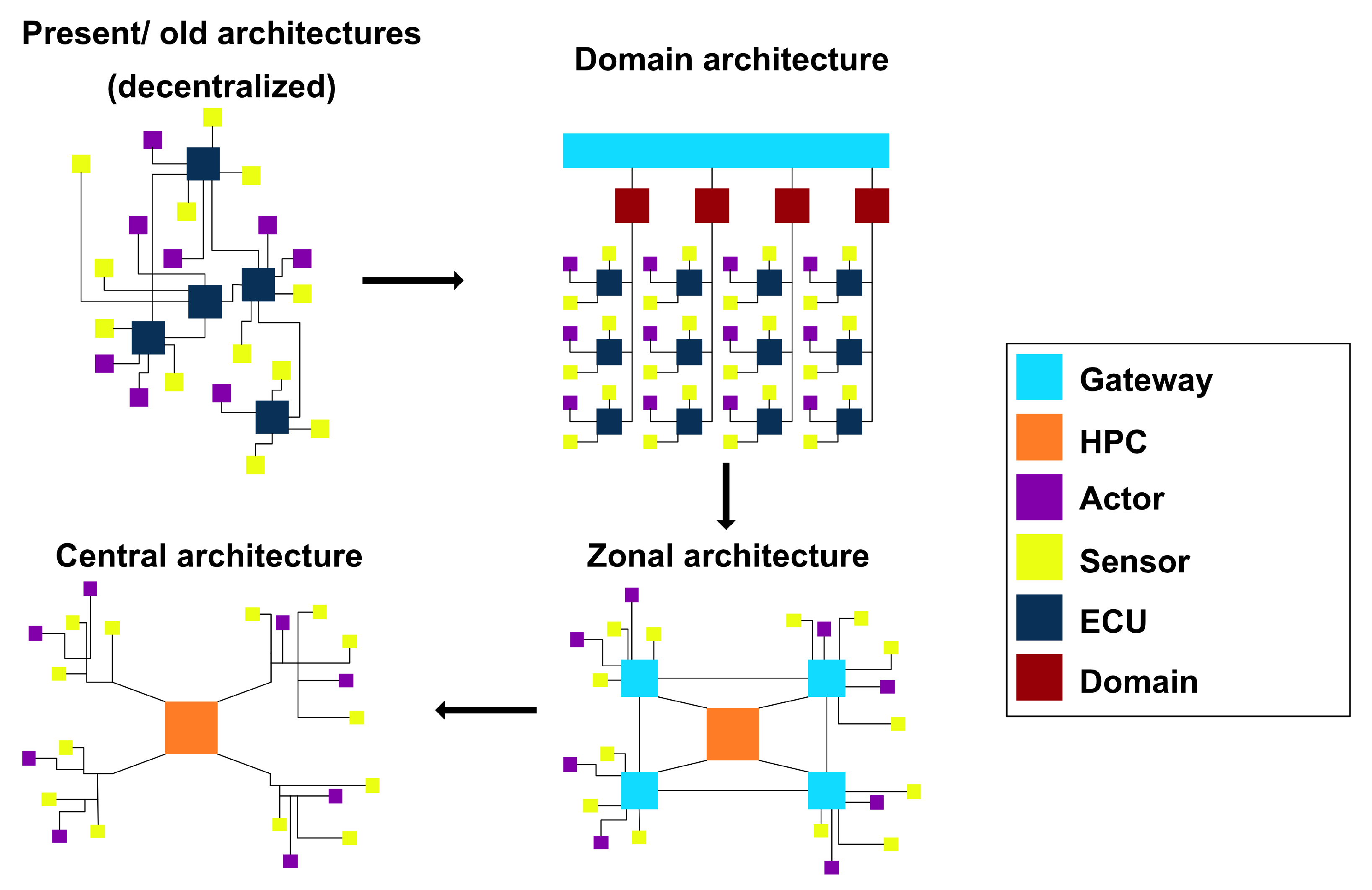
2.1. E/E- Architectures
2.2. Functional Safety
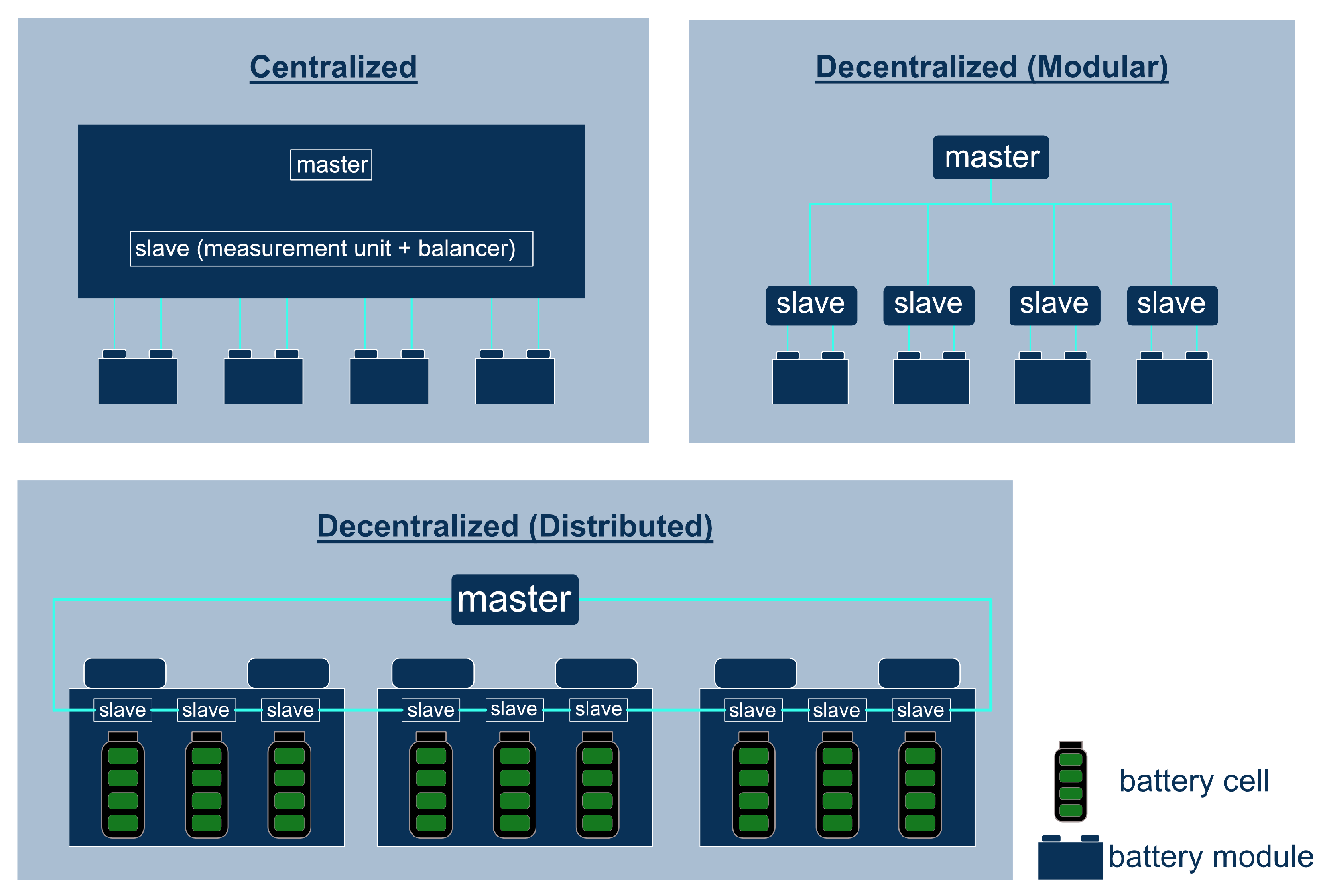
2.3. Battery Management Systems
2.4. Further Development of E/E Architectures and Challenges in Product Development
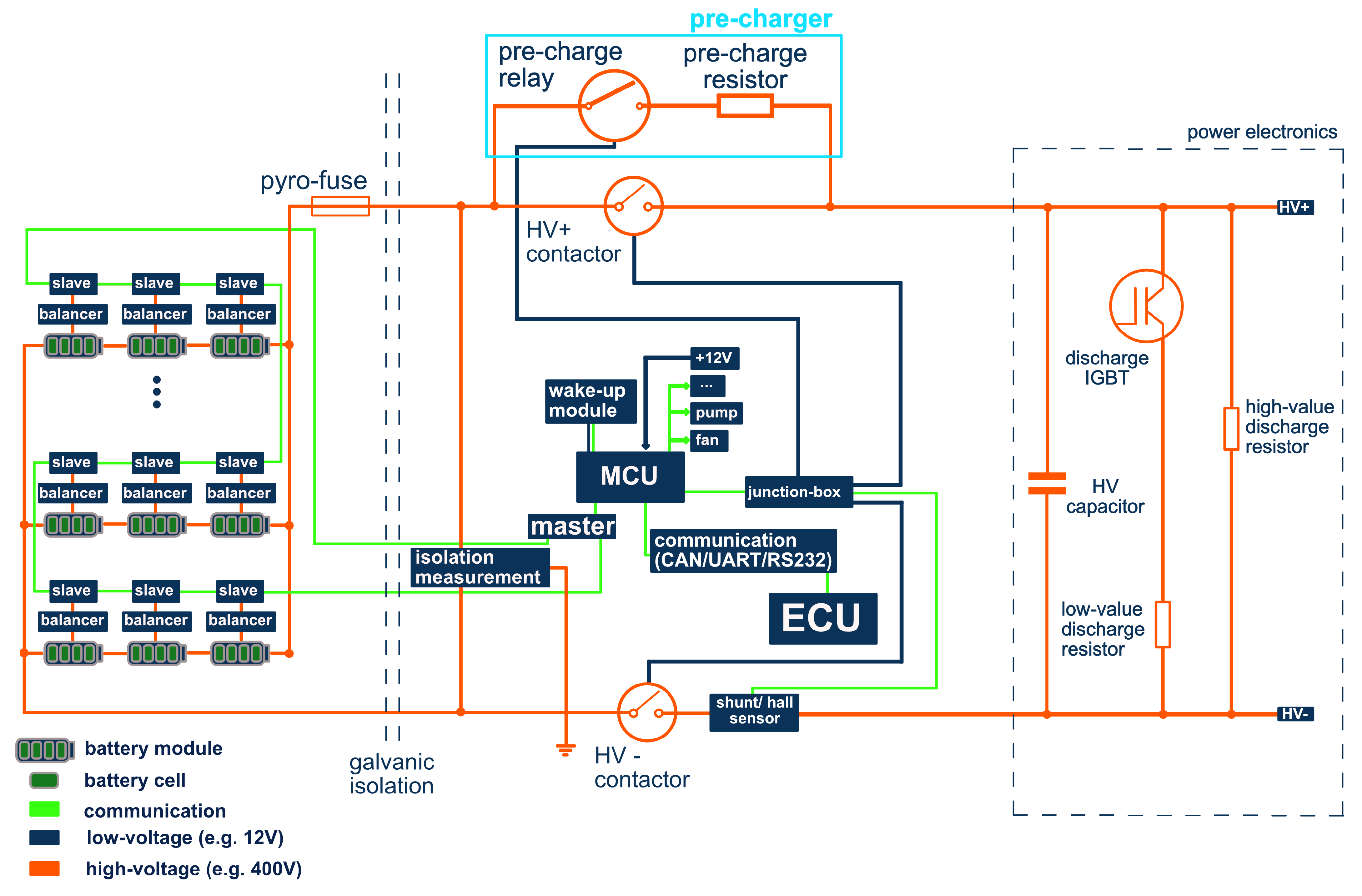
3. Design of a Distributed BMS and Common BMS Functions
3.1. Balancing
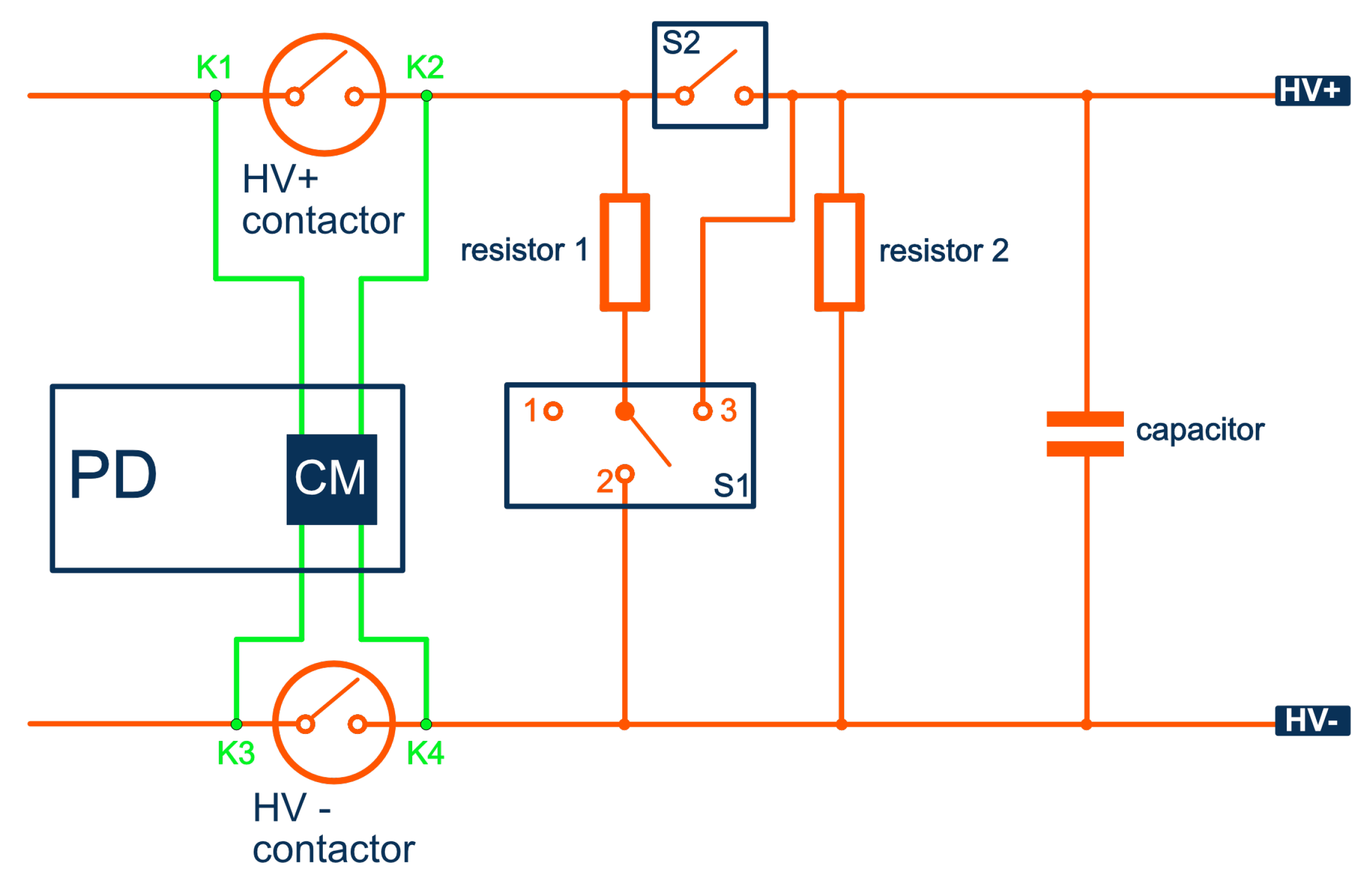
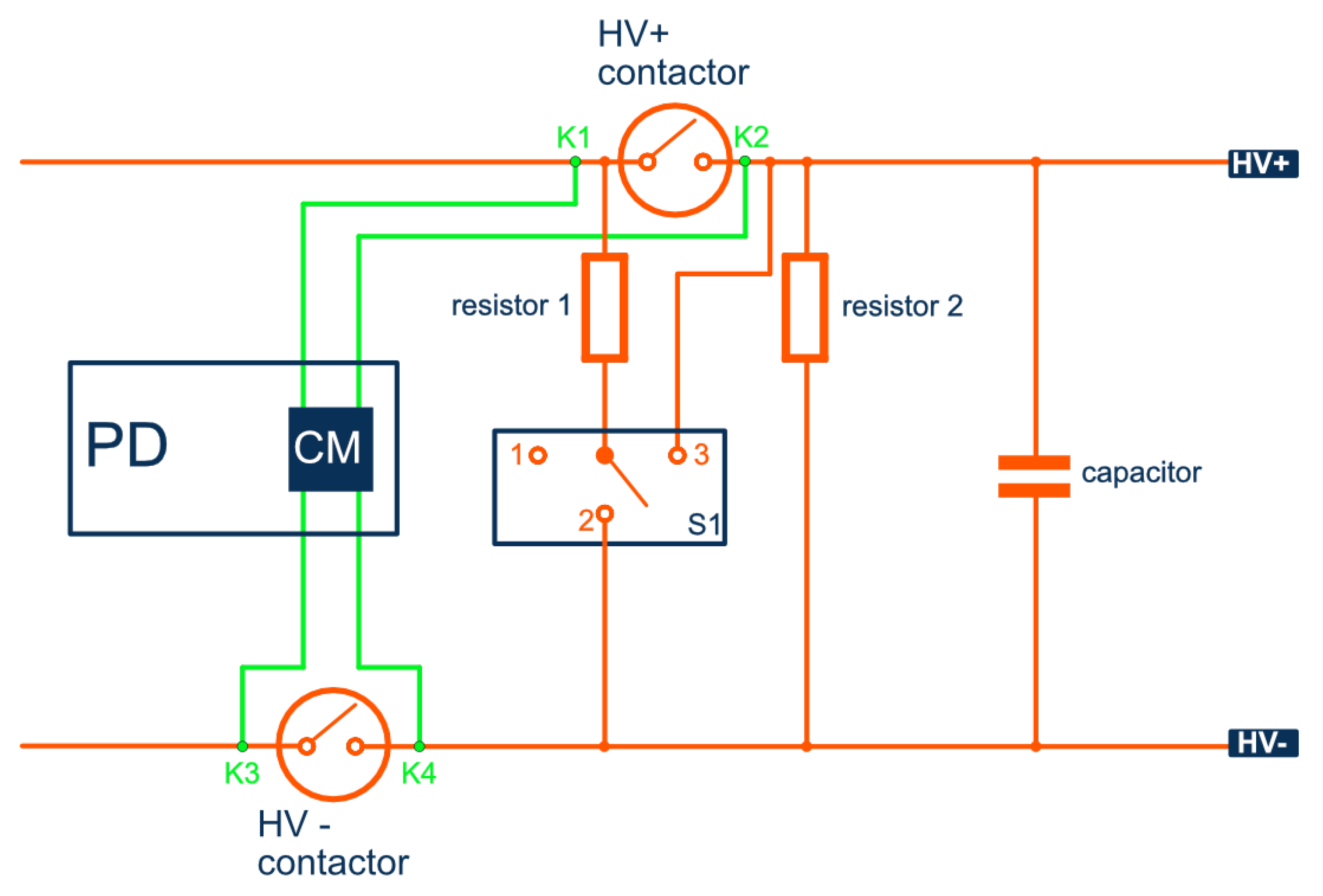
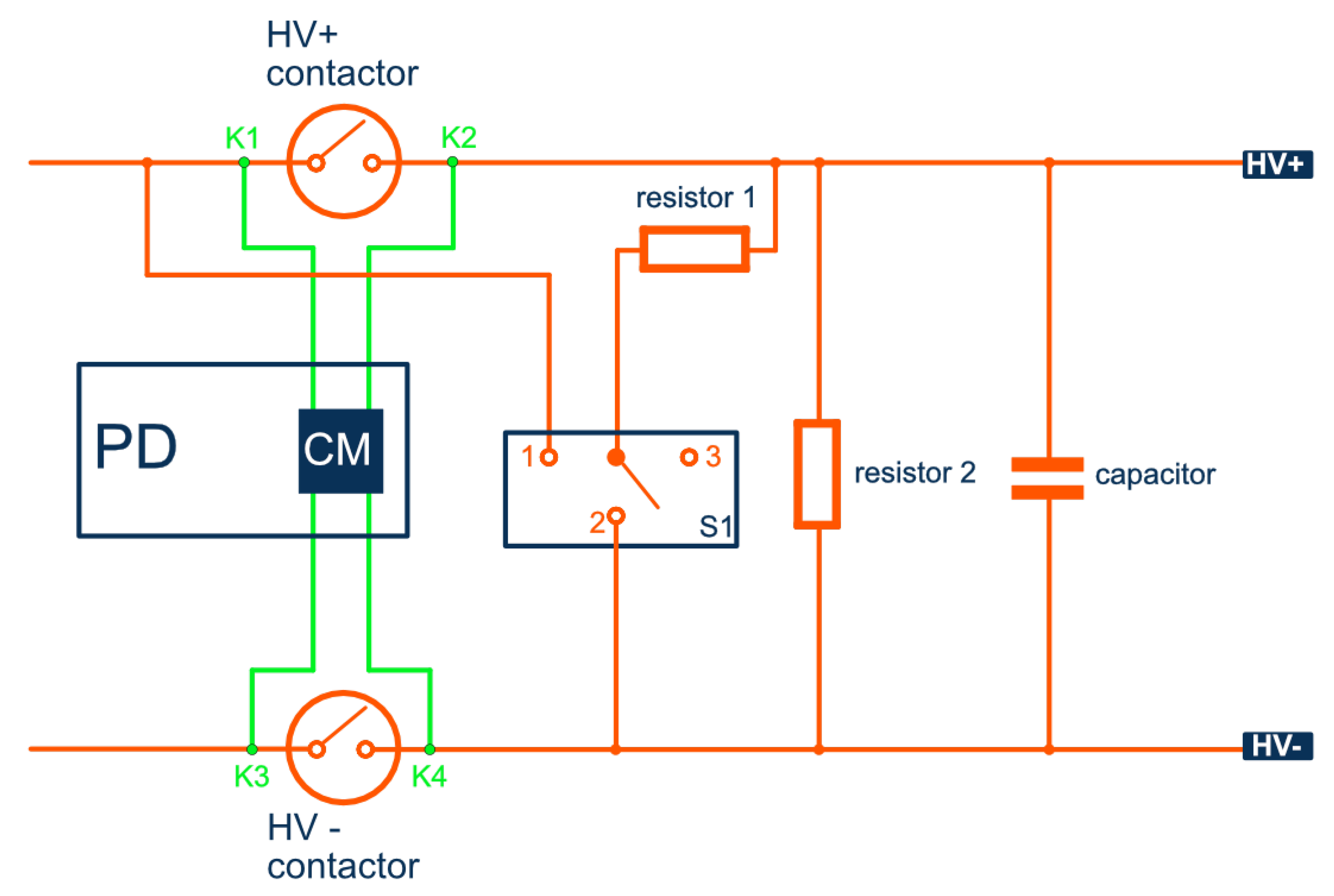
3.2. HV-Contactors and Electrical Safety
4. Analysis of Centralized BMS Architectures
4.1. Design of a Centralized BMS
4.2. Wireless Communication
4.3. Common and Additional BMS Functions
5. Methodical Approach to the Synthesis of BMS Architectures
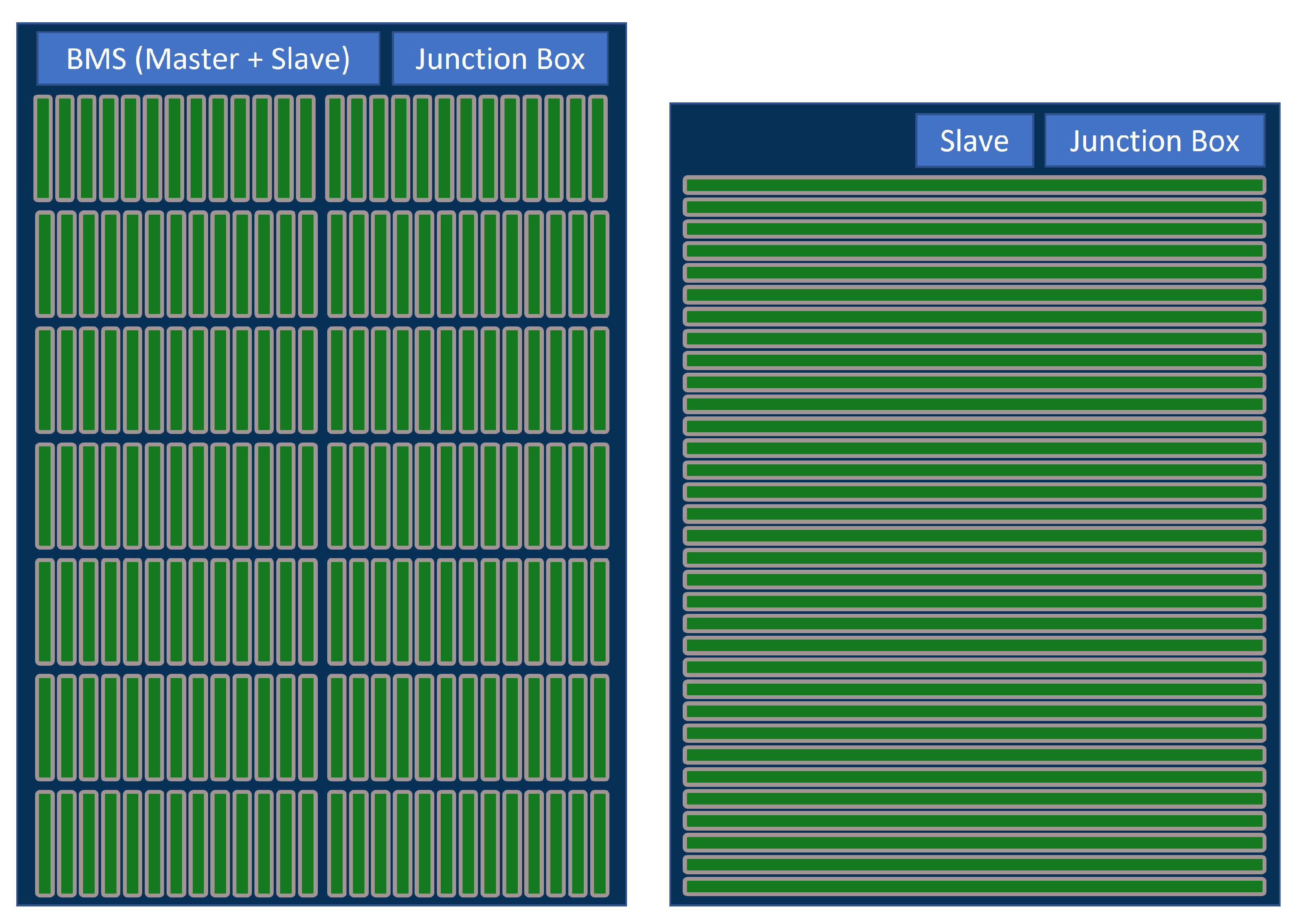
- The vehicle battery consists of individual cells, which are connected in series or parallel in order to provide the desired capacity and voltage level as well as charge and discharge current.
- The vehicle battery may consist of sub-modules, which also consists of individual cells, which are connected in series or parallel in order to provide the desired capacity, voltage level and discharge current. The cause for these sub-modules can be geometrical (divided spaces in the vehicle for battery sub-modules), functional (e.g. redundant sub-modules) or caused by assembly considerations (e.g., sub-modules with lower voltage, which are less dangerous).
- The BMS must provide protection devices for disconnecting the mains (e.g., contactors, pyro-fuse) and protection against high currents (e.g., fuses, pre-charge resistor).
- The measurement of voltage, current and temperature is important, because the cells need to be operated in the safe operating area.
- The BMS may also be responsible for an active regulation of the temperature of the vehicle battery; usually both a regulation of heating and cooling entities is necessary.
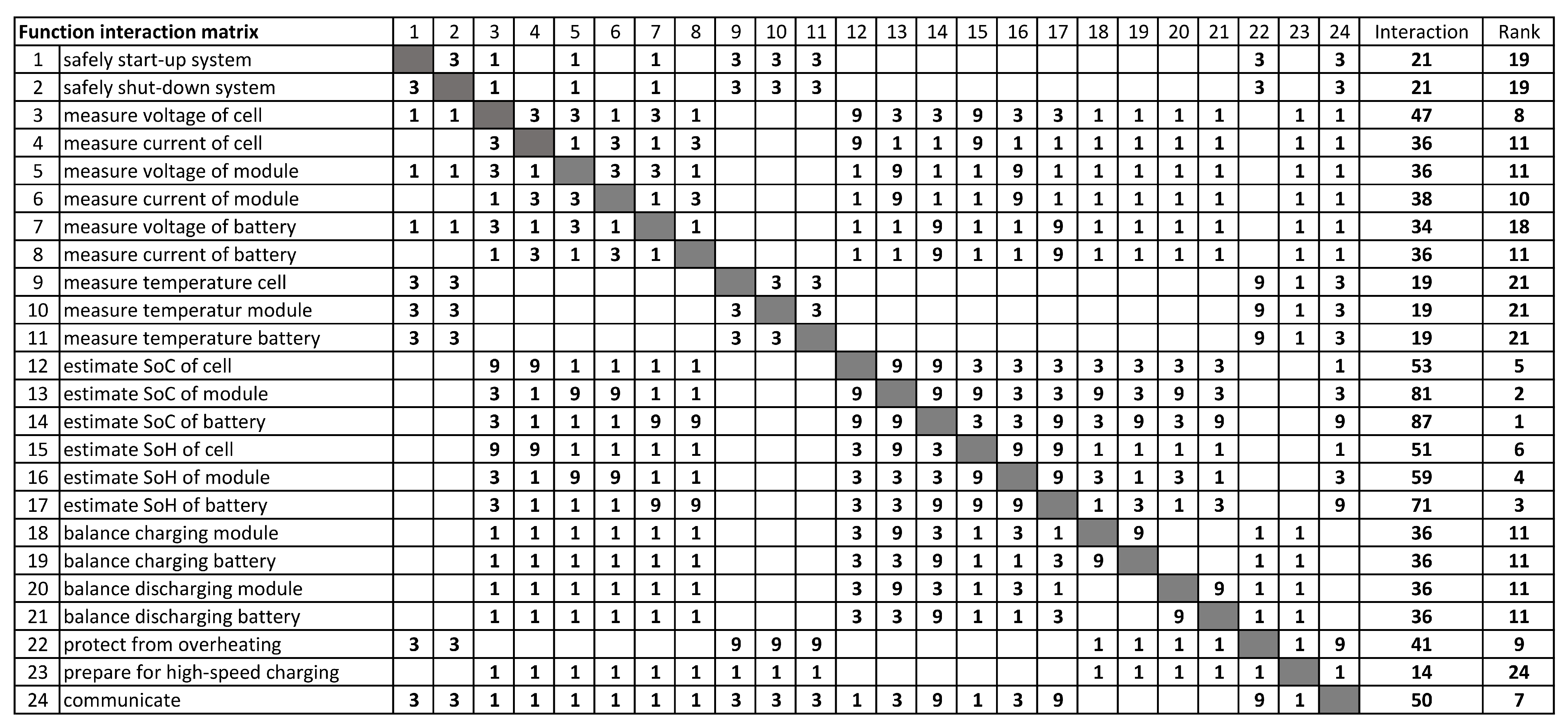
- Safely start-up and shut down the system (in normal operation or in case of a major error e.g., a crash),
- Measure the voltage of each individual cell,
- measure the discharge and charge current of the individual cells, of sub-modules and/or of the whole vehicle battery,
- measure the temperature at certain points of the battery,
- estimate the state of charge (SoC) of the individual cells, of sub-modules and/or of the whole vehicle battery,
- estimate the state of health (SoH) of the individual cells, of sub-modules and/or of the whole vehicle battery,
- balance the charging voltage resp. current of the individual cells and of sub-modules,
- balance the discharging voltage resp. current of the individual cells and of sub-modules,
- protect the cells from overheating,
- prepare the cells for high-speed charging or discharging and
- communicate with the drive train and the human machine interface (HMI).
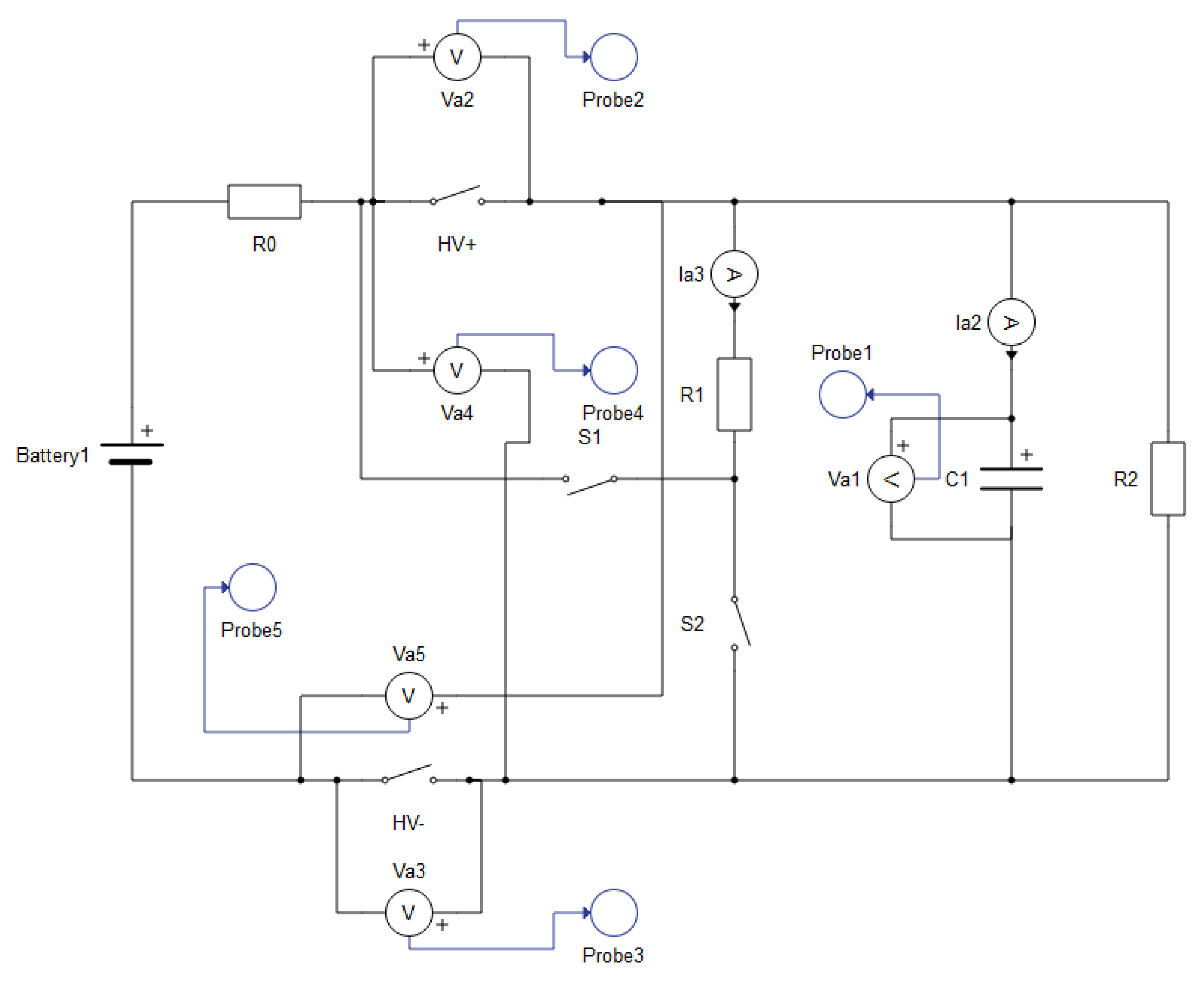
6. Exemplary Synthesis of a Powertrain Domain Focusing Start-Up and Shut-Down of the HV-System
6.1. Detailed Function and Interaction Analysis
6.2. Failure Modes and Comparison of the Presented Topologies
7. Conclusions, Summary and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Sample Availability
Abbreviations
| ABS | Anti-lock braking system |
| ADAS | Advanced Driver Assistant Systems |
| ASIL | Automotiv Safety Integrity Level |
| BEV | Battery Electric Vehicle |
| BMS | Battery Management System |
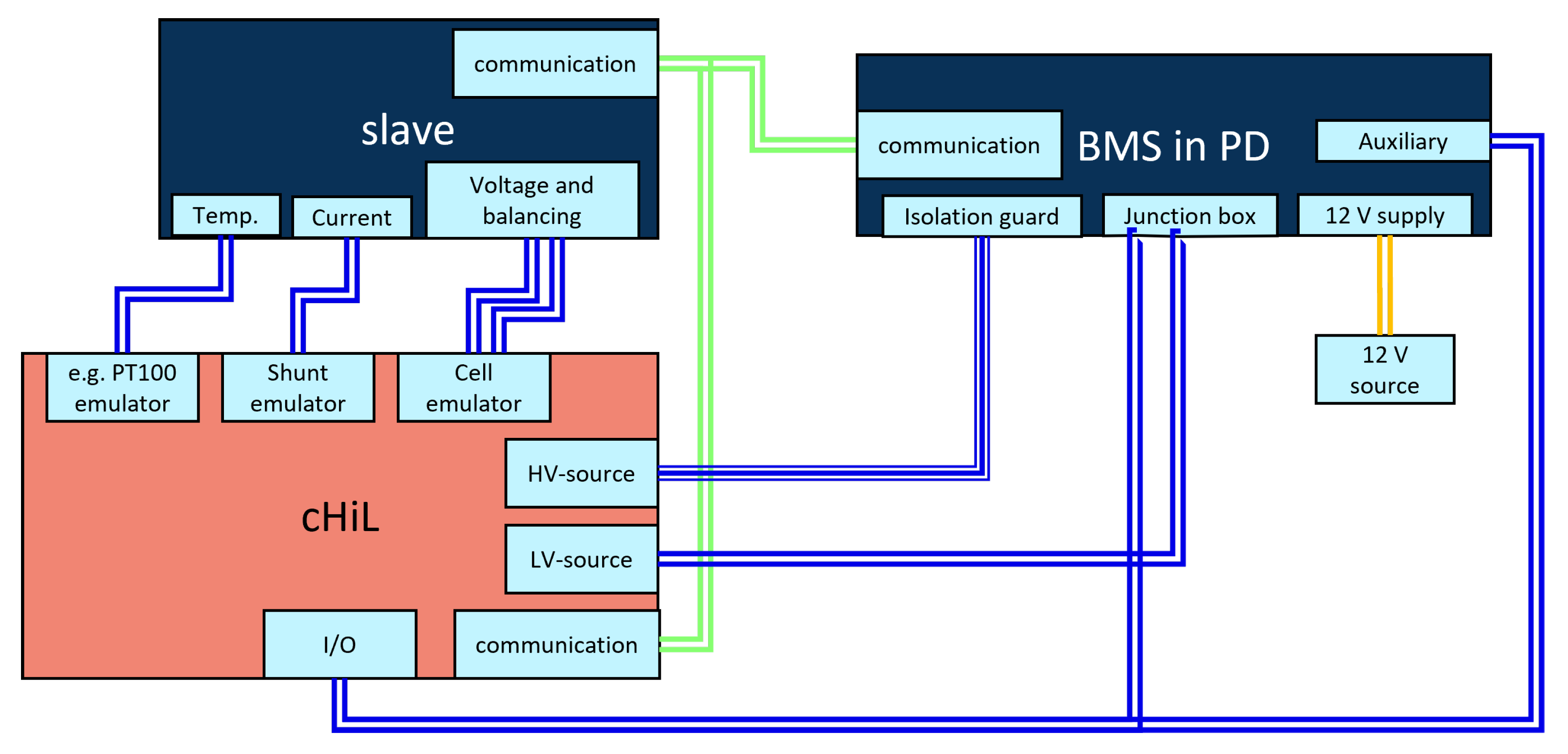
| CHIL | Controller Hardware-in-the-Loop |
| CM | Cross-measurement |
| DCU | Domain computing unit |
| E/E | Electrical and electronic |
| ECU | Electric control unit |
| EMI | Electro magnetic Interferences |
| FCEV | Fuel Cell Electric Vehicle |
| HEV | Hybrid Electric Vehicle |
| HIL | Hardware-in-the-Loop |
| HPC | High performance computer |
| HV | High voltage |
| HV+ | Positive high voltage |
| HV− | Negative high voltage |
| IVN | In vehicle networks |
| MCU | Micro control unit |
| OTA | Over the air |
| PD | Powertrain Domain |
| RESS | Rechargeable energy storage system |
| SOA | Safe operating area |
| SOC | State of charge |
| SOH | State of health |
| SOL | State of life |
| SOP | State of available power |
| 3S2R | 3 switches/contactors and 2 resistors |
| 4S2R | 4 switches/contactors and 2 resistors |
References
- Autoweek. Available online: https://www.autoweek.com/news/green-cars/a37102623/new-mercedes-platforms-will-be-ev-only-from-2025/ (accessed on 30 May 2022).
- CNET. Available online: https://www.cnet.com/roadshow/news/volkswagen-all-electric-ev-europe-us/ (accessed on 30 May 2022).
- Forbes. Available online: https://www.forbes.com/sites/michaeltaylor/2021/02/17/ford-europe-commits-to-ev-only-future-first-car-due-in-2023/ (accessed on 30 May 2022).
- Volkswagen’s MEB Platform Underpins a New Generation of Electric Cars (CNET). Available online: https://www.cnet.com/roadshow/news/volkswagen-meb-electric-car-platform/ (accessed on 31 May 2022).
- Mercedes-Benz Announces Two Dedicated EV Platforms: EVA And MMA. Available online: https://insideevs.com/news/447621/mercedes-benz-dedicated-ev-platforms-eva-mma/ (accessed on 31 May 2022).
- Bandur, V.; Selim, G.; Pantelic, V.; Lawford, M. Making the case for centralized automotive E/E architectures. IEEE Trans. Veh. Technol. 2021, 70, 1230–1245. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.; Tsui, K.L.; Pecht, M. Battery management systems in electric and hybrid vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.U.; Zafar, A.; Nengroo, S.H.; Hussain, S.; Junaid Alvi, M.; Kim, H.J. Towards a smarter battery management system for electric vehicle applications: A critical review of lithium-ion battery state of charge estimation. Energies 2019, 12, 446. [Google Scholar] [CrossRef] [Green Version]
- DriveBattery2015: “Intelligente Steuerungs- und Verschaltungskonzepte Für Modulare Elektrofahrzeug-Batteriesysteme Zur Steigerung der Effizienz und Sicherheit Sowie Zur Senkung der Systemkosten”: Abschlussbericht des Verbundvorhabens: Laufzeit des Vorhabens: 01.08.2013–30.04.2015. Available online: https://www.tib.eu/suchen/id/TIBKAT:862982553/ (accessed on 31 May 2022).
- Aktas, A. Design and implementation of adaptive battery charging method considering the battery temperature. IET Circuits Devices Syst. 2019, 14, 72–79. [Google Scholar] [CrossRef]
- Bozdal, M.; Samie, M.; Aslam, S.; Jennions, I. Evaluation of CAN Bus Security Challenges. Sensors 2020, 20, 2364. [Google Scholar] [CrossRef] [Green Version]
- Ernst, J.M.; Michaels, A.J. LIN bus security analysis. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2085–2090. [Google Scholar]
- Park, I.; Sunwoo, M. FlexRay network parameter optimization method for automotive applications. IEEE Trans. Ind. Electron. 2010, 58, 1449–1459. [Google Scholar] [CrossRef]
- Performance to Power the Future (Bosch). Available online: https://www.bosch-mobility-solutions.com/en/mobility-topics/vehicle-computer/ (accessed on 31 May 2022).
- Continental. Available online: https://www.continental.com/en/press/press-releases/volkswagen-id3/ (accessed on 30 May 2022).
- Tesla Hardware 3 (Full Self-Driving Computer) Detailed (Autopilot Review). Available online: https://www.autopilotreview.com/tesla-custom-ai-chips-hardware-3/ (accessed on 31 May 2022).
- Haas, W.; Langjahr, P. Cross-domain vehicle control units in modern e/e architectures. In Proceedings of the 16th Internationales Stuttgarter Symposium, Stuttgarter, Germany, 15–16 March 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1619–1627. [Google Scholar]
- Reinhardt, D.; Kucera, M. Domain controlled architecture. In Proceedings of the Third International Conference on Pervasive and Embedded Computing and Communication Systems, Barcelona, Spain, 19–21 February 2013. [Google Scholar]
- Jiang, S. Vehicle e/e architecture and its adaptation to new technical trends (No. 2019-01-0862). In SAE Technical Paper; SAE International: Warrendale, PA, USA, 2 April 2019. [Google Scholar]
- Askaripoor, H.; Hashemi Farzaneh, M.; Knoll, A. E/E Architecture Synthesis: Challenges and Technologies. Electronics 2022, 11, 518. [Google Scholar] [CrossRef]
- All Electronics. Available online: https://www.all-electronics.de/markt/architekturen-aus-der-avionik-im-auto-wiederverwenden.html (accessed on 10 June 2022).
- Vector. Available online: https://www.vector.com/at/de/news/news/testen-unter-zeitdruck-flexible-pruefstaende-fuer-avionik-systeme-1/ (accessed on 10 June 2022).
- Steinbach, T. Ethernet-Basierte Fahrzeugnetzwerkarchitekturen für zukünftige Echtzeitsysteme im Automobil; Springer: Wiesbaden, Germany, 2018. [Google Scholar]
- EVERLASTING. D6.1—Analysis of the State of the Art on BMS. Available online: https://everlasting-project.eu/2017/03/ (accessed on 10 June 2022).
- Tatman, D. Functional Safety Considerations in Battery Management for Vehicle Electrification; Texas Instruments: Dallas, TX, USA, 2020. [Google Scholar]
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery Management System Hardware Concepts: An Overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Global Registry. Addendum 20: Global Technical Regulation No. 20. Available online: https://unece.org/transport/standards/transport/vehicle-regulations-wp29/global-technical-regulations-gtrs (accessed on 10 June 2022).
- Zimmer, B.; Oertel, M. E/E Architectures with AUTOSAR Adaptive: More Performance, Please! ATZ Elektronik 2019, 5, 1–5. [Google Scholar]
- Messier, P.; LeBel, F.-A.; Rouleau, J.; Trovao, J.P.F. Multi-Cell Emulation for Battery Management System Validation. IEEE Veh. Power Propuls. Conf. 2018, 10, 1109. [Google Scholar]
- Dai, H.; Jiang, B.; Hu, X.; Lin, X.; Wei, X.; Pecht, M. Advanced battery management strategies for a sustainable energy future: Multilayer design concepts and research trends. Renew. Sustain. Energy Rev. 2020, 10, 1016. [Google Scholar] [CrossRef]
- Designing a BMS (Battery Management System) for a Stationary Battery Storage Solution. Available online: https://www.integrasources.com/blog/bms-battery-management-system-battery-storage-solution/ (accessed on 31 May 2022).
- Instructables. Available online: https://www.instructables.com/Battery-Management-System-Introduction-to-Hardware/ (accessed on 10 June 2022).
- Texas Instruments. Available online: https://www.analog.com/en/about-adi/news-room/press-releases/2020/adi-introduces-automotive-industry-first-wireless-battery-management-system-electric-vehicles.html (accessed on 10 June 2022).
- Santeramo, A. Test of Automotive Boards. Master’s Thesis, Politecnico di Torino, Turin, Italy, 2019. [Google Scholar]
- Analog Devices. Available online: https://www.analog.com/en/technical-articles/maximizing-cell-monitoring-accuracy-data-integrity-bms.html/ (accessed on 10 June 2022).
- Lukasiewycz, M.; Steinhorst, S.; Sagstetter, F.; Chang, W.; Waszecki, P.; Kauer, M.; Chakraborty, S. Cyber-physical systems design for electric vehicles. In Proceedings of the 2012 15th Euromicro Conference on Digital System Design (IEEE), Cesme, Izmir, Turkey, 5–8 September 2012; pp. 477–484. [Google Scholar]
- Lukasiewycz, M.; Steinhorst, S.; Andalam, S.; Sagstetter, F.; Waszecki, P.; Chang, W.; Kauer, M.; Mundhenk, P.; Shanker, S.; Fahmy, S.A.; et al. System architecture and software design for electric vehicles. In Proceedings of the 50th Annual Design Automation Conference, Austin, TX, USA, 29 May–7 June 2013; pp. 1–6. [Google Scholar]
- Butzkamm, C.; Brand, K. Performancebetrachtung innerhalb einer serviceorientierten E/E-Architektur. ATZextra 2019, 24, 28–33. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Miller, C. First Toyota with Solid State Batteries Will Be a Hybrid. Car and Driver. 2022. Available online: https://www.caranddriver.com/news/a38711469/toyota-solid-state-batteries-2025/ (accessed on 1 July 2022).
- Walden, D.D.; Roedler, G.J.; Forsberg, K.; Hamelin, R.D.; Shortell, T.M. Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities, 4th ed.; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Eckert, C.; Albers, A.; Bursac, N.; Chen, H.X.; Clarkson, J.; Gericke, K.; Gladysz, B.; Maier, J.; Rachenkova, G.; Shapiro, D.; et al. Integrated product and process models: Towards an integrated framework and review. In Proceedings of the ICED 2015, Milan, Italy, 27–30 July 2015. [Google Scholar]
- VDI/VDE 2206 Entwurf. Entwicklung Cyber-Physischer Mechatronischer Systeme (CPMS); Beuth: Berlin, Germany, 2020. [Google Scholar]
- Gräßler, I.; Hentze, J. The new V-Model of VDI 2206 and its validation. at-Automatisierungstechnik 2020, 68, 312–324. [Google Scholar] [CrossRef]
- Eisenbart, B.; Gericke, K.; Blessing, L.T.; McAloone, T.C. A DSM-based framework for integrated function modelling: Concept, application and evaluation. Res. Eng. Des. 2017, 28, 25–51. [Google Scholar] [CrossRef] [Green Version]
- Elwert, M.; Ramsaier, M.; Eisenbart, B.; Stetter, R.; Till, M.; Rudolph, S. Digital Function Modeling in Graph-Based Design Languages. Appl. Sci. 2022, 12, 5301. [Google Scholar] [CrossRef]
- Shan, Q.; Chen, Y. Product Module Identification Based on Assured Customer Requirements. Procedia Eng. 2011, 14, 5313–5317. [Google Scholar] [CrossRef] [Green Version]
- Karakasic, M.; Zadnik, Z.; Kljajin, M.; Duhovnik, J. Design Solutions with Produt Function Matrix and its Requests. In Proceedings of the International Design Conference DESIGN, Dubrovnik, Croatia, 17–20 May 2010. [Google Scholar]
- Deubzer, F.; Lindemann, U. Functional Modelling for Design Synthesis using MSM Methodology. In Proceedings of the International Design Structure Matrix Conference DSM’08, Stockholm, Sweden, 11–12 November 2008. [Google Scholar]
- Holder, K.; Zech, A.; Ramsaier, M.; Stetter, R.; Niedermeier, H.P.; Rudolph, S.; Till, M. Model-based requirements management in gear systems design based on graph-based design languages. Appl. Sci. 2017, 7, 1112. [Google Scholar] [CrossRef] [Green Version]
- Stetter, R. Fault-Tolerant Design and Control of Automated Vehicles and Processes. Insights for the Synthesis of Intelligent Systems; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Pancik, J.; Vemola, A.; Kledus, R.; Semela, M.; Bradac, A. Auto recalls and software quality in the automotive sector. EAI Endorsed Trans. Scalable Inf. Syst. 2018, 5, 7. [Google Scholar] [CrossRef] [Green Version]
- Stetter, R. Algorithms and Methods for the Fault-Tolerant Design of an Automated Guided Vehicle. Sensors 2022, 22, 4648. [Google Scholar] [CrossRef] [PubMed]
- Jooß, B.; Rotter, T.; Schramm, D. The efficient use of HiL simulation and vehicle tests for in-house software development at Porsche. In 11th International Munich Chassis Symposium 2020; Pfeffer, P.E., Ed.; Springer Vieweg: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Vishay. Available online: https://www.vishay.com/docs/32594/hrha.pdf (accessed on 10 June 2022).
- Zero-EV. Available online: https://zero-ev.co.uk/product/hs100-30r-f-precharge-resistor/?v=79cba1185463 (accessed on 10 June 2022).
- Entwicklung Elektronik. Available online: https://www.industr.com/de/schadensreduktion-in-elektrofahrzeugen-durch-hochvolt-trennschalter-2620746 (accessed on 10 June 2022).
- Leistungselektronik. Available online: https://www.leistungselektronik.de/hv-mosfet-ersetzt-elektromechanik-wie-relais-und-leistungsschutzschalter-a-1043176/ (accessed on 10 June 2022).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | HV+ [V] | HV− [V] | K1/K4 [V] | K2/K3 [V] | HV+ | HV− | S2 | S1 | |I| (Resistor 1) [A] | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 | 2 | 1 | |||||||||
| off/standby | 0 | 0 | 432.5 | 432.5 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 0 | 1 | 0 |
| active discharge | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 1 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 0 | 432.5 | 432.5 | 0 | 1 | 0 | 0 | 0 | 1 | 0 |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 0 |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0.3 (maximal) |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 0 | 432.5 | 432.5 | 1 | 0 | 0 | 0 | 0 | 1 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 0 | 0 | 1 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 0 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 1 | 0 | 0 | 1 | 0 |
| active discharge | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 1 | 0 | 1 | 0 | 0.22 (maximal) |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 1 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 0 | 432.5 | 432.5 | 1 | 1 | 0 | 0 | 0 | 1 | 0 |
| critical discharge | 0 | 0 | 432.5 (decreasing) | 432.5 (decreasing) | 1 | 1 | 0 | 0 | 1 | 0 | 0.6 (constant) |
| pre-charge | 0 | 0 | 431.67 | 430.67 | 1 | 1 | 0 | 1 | 0 | 0 | 0.3 (maximal) |
| normal operating state | 0 | 0 | 431.64 | 431.64 | 1 | 1 | 1 | 0 | 0 | 1 | 0 |
| critical discharge | 0 | 0 | 432.5 (decreasing) | 432.5 (decreasing) | 1 | 1 | 1 | 0 | 1 | 0 | 0.6 (constant) |
| n.d. | 0 | 0 | 431.23 | 432.23 | 1 | 1 | 1 | 1 | 0 | 0 | 0 |
| State | HV+ [V] | HV− [V] | K1/K4 [V] | K2/K3 [V] | HV+ | HV− | 3 | 2 | 1 | |I|(R1) [A] |
|---|---|---|---|---|---|---|---|---|---|---|
| off/ standby | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 0 | 0 | 1 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 0 | 1 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 0 | 0 |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 0 | 1 | 0 |
| critical discharge state | 432.5 (decreasing) | 0 | 432.5 (decreasing) | 0 | 0 | 1 | 0 | 1 | 0 | 0.6 (constant) |
| pre-charge | 432.5 (decreasing) | 0 | 432.5 | 0 | 0 | 1 | 1 | 0 | 0 | 0.5 (maximal) |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 0 | 0 | 1 | 0 |
| active discharge | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 0 | 1 | 0 | 0.4 (maximal) |
| n.d. | 0 | 432.41 | 0 | 432.5 | 1 | 0 | 1 | 0 | 0 | 0 |
| normal operating state | 0 | 0 | 432.5 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| critical discharge state | 0 | 0 | 432.5 (decreacing) | 0 | 1 | 1 | 0 | 1 | 0 | 0.6 (constant) |
| n.d. | 0 | 0 | 432.5 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| State | HV+ [V] | HV− [V] | K1/K4 [V] | K2/K3 [V] | HV+ | HV− | 3 | 2 | 1 | |I| (R1) [A] |
|---|---|---|---|---|---|---|---|---|---|---|
| n.d. | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 0 | 0 | 1 | 0 |
| active discharge | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 0 | 1 | 0 | 0.4 (maximal) |
| off/ standby | 0 | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 0 | 0 |
| pre-charging | 432.5 (decreasing) | 0 | 432.5 | 432.5 | 0 | 1 | 0 | 0 | 1 | 0.3 (maximal) |
| active discharge | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 0 | 1 | 0 | 0.4 (maximal) |
| n.d. | 432.5 | 0 | 432.5 | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 0 | 0 | 1 | 0 |
| active discharge | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 0 | 1 | 0 | 0.4 (maximal) |
| n.d. | 0 | 432.5 | 0 | 432.5 | 1 | 0 | 1 | 0 | 0 | 0 |
| n.d. | 0 | 0 | 432.5 | 432.5 | 1 | 1 | 0 | 0 | 1 | 0 |
| critical discharge | 0 | 0 | 432.5 (decreasing) | 432.5 (decreasing) | 1 | 1 | 0 | 1 | 0 | 0.6 (constant) |
| normal operating state | 0 | 0 | 432.5 | 432.5 | 1 | 1 | 1 | 0 | 0 | 0 |
| 4S2R | 3S2R | 3S2R2 | |
|---|---|---|---|
| Number of switches | 4 | 3 | 3 |
| Number of resistors | 2 | 2 | 2 |
| Number of fault cases | 2 | 2 | 1 |
| Possibility of fault detection via CM | − | + | + |
| Evaluation of functional safety | + | + | + |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schärtel, L.; Reick, B.; Pfeil, M.; Stetter, R. Analysis and Synthesis of Architectures for Automotive Battery Management Systems. Appl. Sci. 2022, 12, 10756. https://doi.org/10.3390/app122110756
Schärtel L, Reick B, Pfeil M, Stetter R. Analysis and Synthesis of Architectures for Automotive Battery Management Systems. Applied Sciences. 2022; 12(21):10756. https://doi.org/10.3390/app122110756
Chicago/Turabian StyleSchärtel, Lukas, Benedikt Reick, Markus Pfeil, and Ralf Stetter. 2022. "Analysis and Synthesis of Architectures for Automotive Battery Management Systems" Applied Sciences 12, no. 21: 10756. https://doi.org/10.3390/app122110756
APA StyleSchärtel, L., Reick, B., Pfeil, M., & Stetter, R. (2022). Analysis and Synthesis of Architectures for Automotive Battery Management Systems. Applied Sciences, 12(21), 10756. https://doi.org/10.3390/app122110756