1. Introduction
Cylindricity error is an important basis for the acceptance of shaft parts. Accurate cylindricity error evaluation not only provides a reliable guarantee for improving the machining accuracy and assembly accuracy of parts but is also a prerequisite for stably improving production efficiency [
1]. The spatial coordinate information of the measured point is measured, and the data are analyzed by an error evaluation algorithm to calculate the cylindricity error of the part [
2]. The cylindricity error evaluation methods include the minimum zone cylinder method (MZC), least square cylinder method (LS), maximum inscribed cylinder method (MIC), and minimum circumscribed cylinder method (MCC). The minimum zone cylindrical method satisfies the minimum condition defined by the cylindricity error and is recognized as an arbitration method in case of inconsistent errors. Since it is an unconstrained nonlinear optimization problem, it cannot be solved directly by a computer. The least square method is widely used in the field of error evaluation by instruments such as the coordinate measuring machine (CMM), which has the advantages of mature theory, simple calculation, and stable evaluation results [
3]. Since least square does not meet the minimum conditions defined by international standards, more in-depth research is required.
In recent years, many scholars have successfully applied the genetic algorithm [
4], ant colony algorithm [
5], artificial immune algorithm [
6], artificial fish swarm algorithm [
7], particle swarm algorithm [
8], and other intelligent algorithms in geometric error assessment. In the field of geometric error evaluation, good results have been achieved. At the same time, more and more algorithms are proposed according to the characteristics of cylindricity error evaluation. He et al. [
9] proposed a cylindricity error evaluation method based on the sequential quadratic programming algorithm, which uses coordinate simplification and the sequential quadratic programming algorithm to improve the accuracy of cylindricity error evaluation. Wu et al. [
10] established an improved integrated learning particle swarm optimization algorithm applied to the cylindricity error evaluation problem to solve the local and globally optimal solutions of the cylindricity error evaluation results. Liu et al. [
11] proposed a cylindricity error evaluation method based on incremental optimization. Li et al. [
12] used the Hybrid Greedy Differential Evolution-Sine-Cosine Algorithm (HGSCADE) to solve optimization problems and evaluate cylindricity errors. Wang et al. [
13] proposed a step-acceleration-based optimization algorithm to solve the efficiency problem of the crankshaft cylindricity error evaluation algorithm. The above methods for geometric error assessment have achieved good assessment accuracy, but the assessment methods are complicated, and further research and improvement are needed to improve the stability and robustness of the methods.
Based on the analysis of the observed data in production and experiments, statisticians observe that the probability of gross deviations is 1% to 10% of the total [
14]. These gross errors seriously affect the error evaluation results. In the field of geodesy, to eliminate or attenuate the effect of gross errors on parameter estimation, Khaled et al. [
15] proposed robust estimation to detect and eliminate gross errors at long distances. Guangfeng et al. [
16] discussed the method of gross difference localization in detail: the “good” and “bad” points of gross difference are eliminated, but the “good” points are often eliminated as well. Jia et al. [
17] studied the effectiveness of robust estimation in weakening and eliminating gross variances. The self-born weighted least square (SWLS) method is a robust estimation method with excellent robustness [
18], which can effectively reduce the effect of gross differences, and the method is mainly applied in the field of mapping. It makes full use of the valid information provided by the conditional equations generated from independent observations to construct the weights of the observations, which can effectively eliminate or attenuate the effect of gross errors on parameter estimation. It is more effective than often other robust estimation methods [
19]. At present, it has the advantages of simple theory and high accuracy of the assessment [
20]. It has a good effect in reducing or eliminating gross errors, etc., but its research and application in the field of geometric error assessment have not been reported [
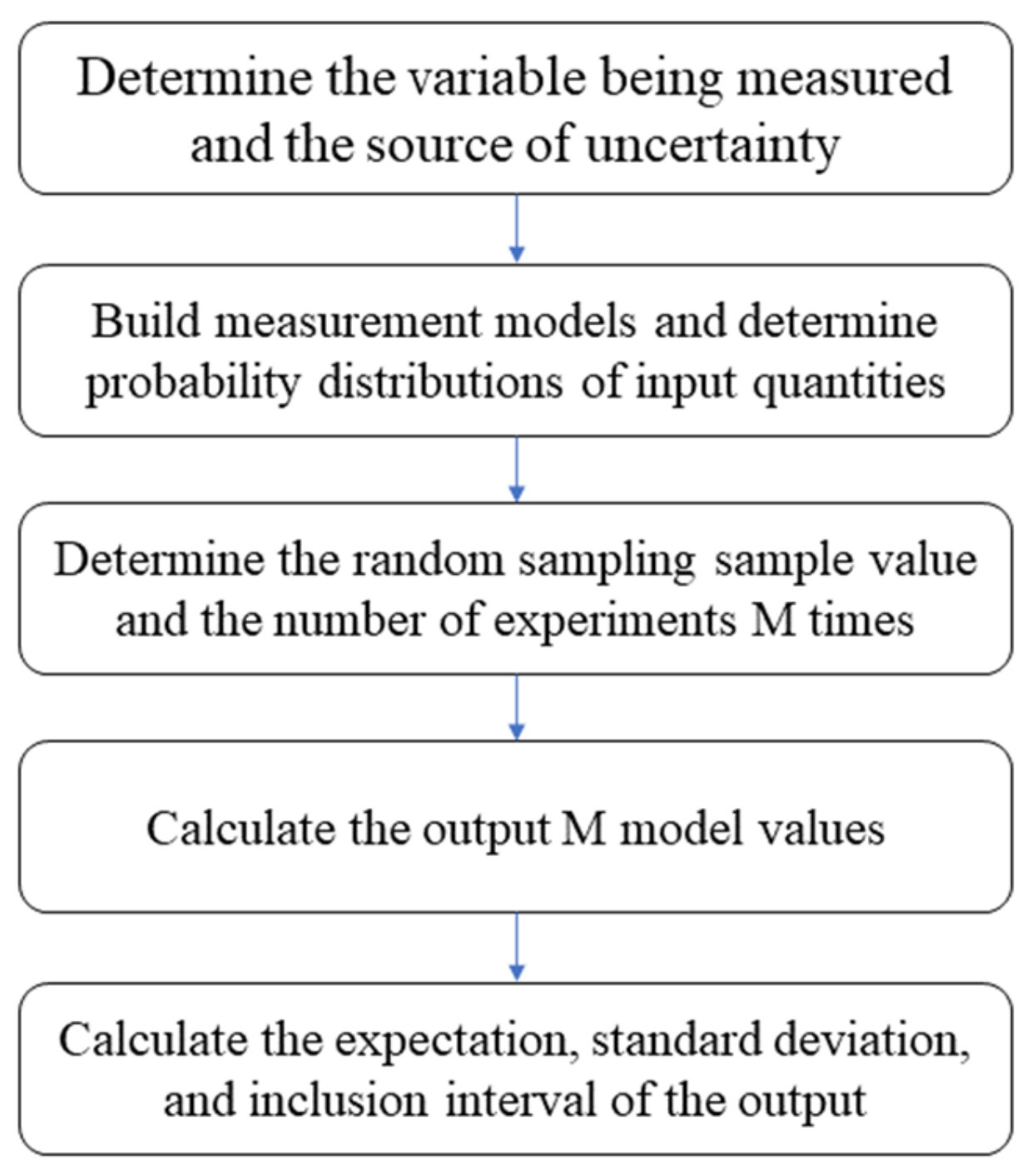
21]. The GUM and MCM methods are widely used in uncertainty assessment. When the calculated results of the GUM method can be verified by MCM, the uncertainty evaluation results have high reliability [
8]. In this paper, we consider the introduction of the SWLS method into the field of geometric error assessment and improve the adaptability of the SWLS method by using cylindricity error evaluation as an example. By combining model initialization with the screening of independent groups, the technique is extended from linear model assessment to a broader range of nonlinear error assessment, improving the adaptability, accuracy, and operational speed of the method. Meanwhile, the GUM method and MCM method were also used to calculate the cylindricity error uncertainty in this paper, which proved the reliability of the error evaluation results.
2. Model of Least Square Solution of Cylindricity Error
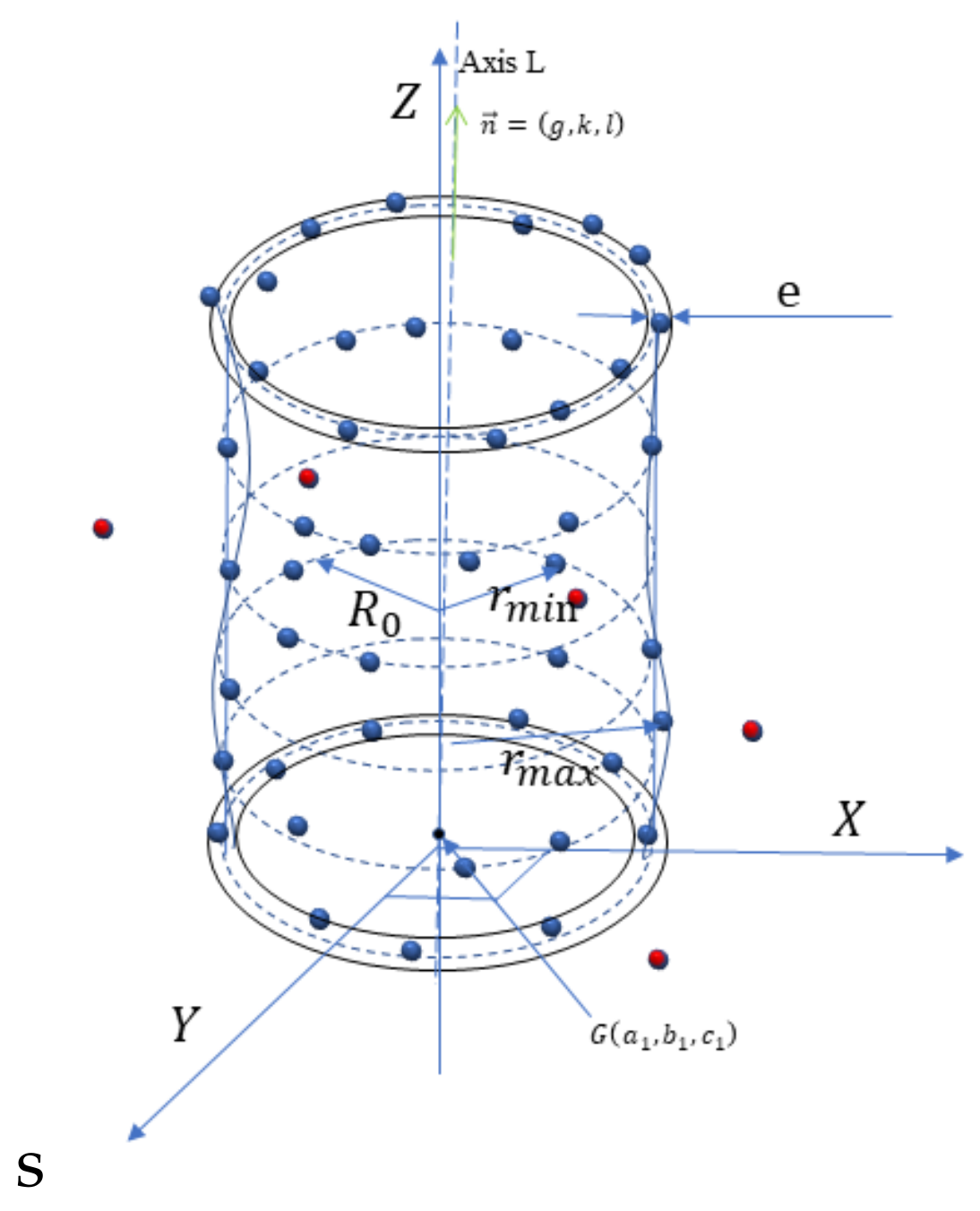
T Cylindricity error is the amount of deviation between the actual measured cylindrical surface and the ideal cylindrical surface, expressed as the difference between the radii of the two coaxial cylindrical surfaces. Assume that the measured coordinates in the right-angle coordinate system are
,
. The intersection point of the least square cylinder axis L and the cylinder interface is set as
. The direction vector is set as
. The equation of the axis
is:
The axial
L equation was simplified to obtain [
13]:
The distance
. from each sampling point on the cylindrical surface to the axis is:
The least square cylinder radius
R is expressed as:
Then the objective function of the least square cylindrical method is [
4]:
The cylindricity error is transformed into a search for the corresponding ideal cylindrical surface axis parameters
, which minimize the objective function
J. From this, the least square cylinder axis
L equation is obtained, and the maximum distance
and the minimum distance
from the actual measuring point to the axis are obtained. The diagram is shown in
Figure 1. The corresponding cylindricity error:
3. SWLS Solution for Cylindricity Error
3.1. Self-Born Weighted Least Square Robust Estimation Method
The SWLS method is a least square robust estimation method. It uses the observation correction number as the effective information provided by the conditional equation and constructs the weights with multiple estimates of the observation correction number. Compared with the ordinary least square method, the SWLS method uses the self-born weights of the observation value as the weights of the observation value, which effectively reduces the influence of gross errors.
SWLS assumes that the observation equation is of the linear form [
18]:
is the coefficient matrix of the observation equation, is the estimated value of the observation value , is the correct number of , is the solution of the unknown, and is the constant term matrix of the observation equation. The unknown matrix , where is the initial unknown value; .
The solution
of the unknown, the observed number of corrections
and the unit weighted variance valuation
can be obtained by using the least square method.
is the weighted matrix;
is the diagonal element in the weighted matrix with an initial value of
.
The coefficient matrix
in Equation (8) is transformed into
and
, and
is a
order full rank matrix;
. is the number of observations, and
t is the number of parameters to be requested. Meanwhile,
and
are matrix transformed to obtain
and
:
According to formulas (12) and (13), we can obtain:
In the formula, , . Both and are not unique and are primarily chosen by independent groups.
Since the absolute value of the accidental error has a finite value,
is used to limit the unit weighted error to a certain estimation range, and
is the value range coefficient (take 3 according to the simulation experiment). From Equations (12) and (13), the
m groups of true error estimates
that satisfy Equation (16) are obtained,
, …,
are:
In the formula, when
,
is the initial value of
,
is the final value of
, and
is the step size when
,
is determined by Equation (15) [
18];
is the diagonal element of the weighted matrix generated by the previous iteration.
The self-born variance is the variance of the observed value calculated from m estimates of the true error of the same observation value. The reproduction weights are the weights of the observation value calculated from the reproduction variance of the observation value. Then, the self-born variance
, self-born variance
, and self-born weights
generated from different observations are calculated as follows:
The calculated self-born weight is taken into the weights of the observation value, and the correction number of the observation value and the error in the unit weights are calculated by the least square method. The iteration terminates when the adjacent observation correction number iteration difference is less than the limit.
3.2. Insufficiency of Self-Born Weighted Least Square Method
SWLS is mainly applied in linear regression, and it uses analytical calculations to solve the error equation. It has not been studied for nonlinear problems and needs to be further optimized and explored. SWLS has certain requirements for the choice of independent groups in the observations and uses the number of observation corrections as valid information supplied by the conditional equation. It is necessary to artificially modify the selection of independent groups in various application settings. The outcomes will exhibit significant variances when the independent group was improperly chosen and includes serious flaws. In geometric error evaluation (e.g., CMM evaluation of geometric errors), producers need measurement methods that are more efficient, accurate and adaptable. The adjustment of the independent group will lead to an increase in production costs as well as a decrease in adaptability and accuracy, so the SWLS method is needed for further improvement.
3.3. Improved self-Born weighted Least Square Method
In response to the above shortcomings, this paper improves the SWLS method to increase the effectiveness of the method. The improved method is called ISWLS. In this paper, we take the calculation of cylindricity error as an example and apply the SWLS method to linearize the nonlinear model to calculate the cylindrical axis equation and cylindricity error. Additionally, an automatic selection step of the independent equation sets is implemented to lessen the impact of the choice of independent equation sets on the outcomes. It eliminates the manual filtering step of the independent group equations and makes the calculation simplified. The calculation steps are as follows:
3.3.1. Model Initialization
To apply the SWLS method to a nonlinear problem, the nonlinear model must first be transformed into a linear model. The model equations are assumed to be:
In order to linearize the equation, a sufficient approximation
of
is taken [
19]:
is a tiny quantity, the Taylor formula can be used to omit the quadratic and more than quadratic terms [
22], and then the functional equation is:
Bringing Equations (3)–(5) into Equation (23), it is expressed in matrix form as:
, and they are determined by the coordinates of the measurement cylinder center position.
3.3.2. Calculation of the Self-Born Weights Function
Equation (24) is divided into t levels according to the number of unknowns, and the first set of equations in each level is selected and combined into a linearly independent combination of error equations. The error equation is expressed as:
Equation (25) is the set of independent equations, and Equation (26) is the set of conditional equations before iteration. Then, according to Equation (9) to Equation (11), the solution of the unknown, the number of observed corrections and the unit weighted variance valuation can be obtained.
3.3.3. Self-Born Weight Iteration and Parameter Calculation
The self-born weights that were calculated were brought into Equation (8) to calculate the number of corrections and unit weight errors of the observations. The new self-born weights are calculated from Equations (18)–(20). The newly calculated self-born weights are brought into Equation (8) to calculate the new number of corrections V and the unit weight errors. The iteration condition is set to correct the number V before and after the difference of the iteration value is less than . The gross error weights far from the column surface are reduced. The axial parameter and cylindricity error are output.
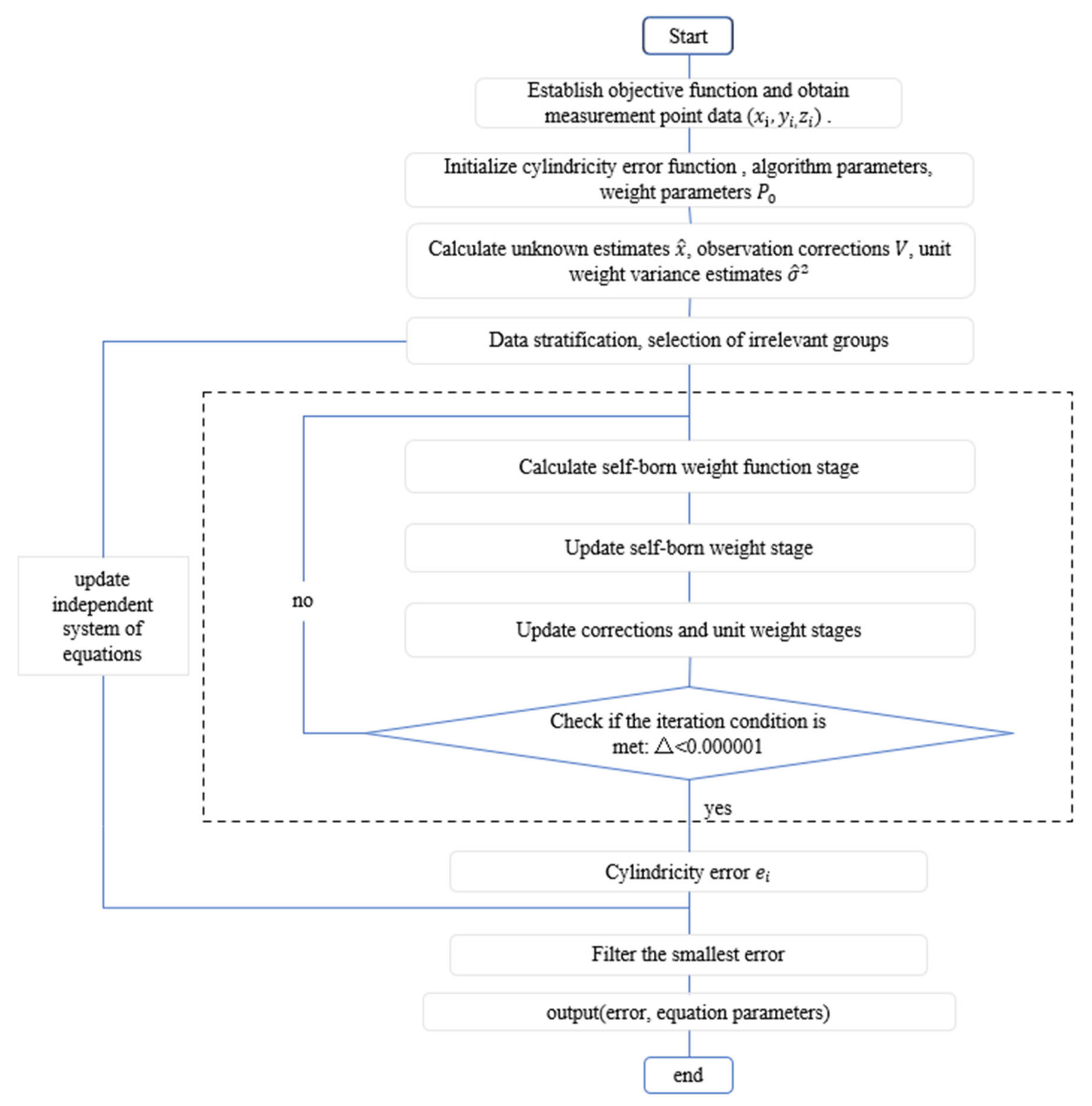
3.3.4. Updating of the Independent Equations
The independent set of equations is Equation (25), and the initial order of the independent set of equations has been obtained from step (2). The number of updates of the independent set of equations is set enough (the number of updates is generally set to the number of samples per level). Step (2) and step (3) are repeated. The set of data with the smallest error is selected. The errors and equation parameters are output. We set enough random sampling times and repeat steps (2) to (3) until a set of data with the smallest error was selected. The number of iterations is determined by the amount of data in each layer. The error and equation parameters are output. The algorithm flow chart is shown in
Figure 2.
6. Conclusions
Since there are cases of gross errors in cylindricity error evaluation, this paper proposes the ISWLS method to evaluate the cylindricity error. The algorithm was compared with the standard PSO, standard GA, and LS methods for error assessment. The ability of the algorithm to resist gross errors was verified by inserting gross error points, and the correctness of the algorithm was verified using literature data. The experimental results show that:
(1) The method in this paper differs from SWLS and conventional global optimization algorithms in that it does not require setting parameters such as independent group order, population size, and crossover variation, and the operation steps are simple. As a result, the algorithm is relatively simple.
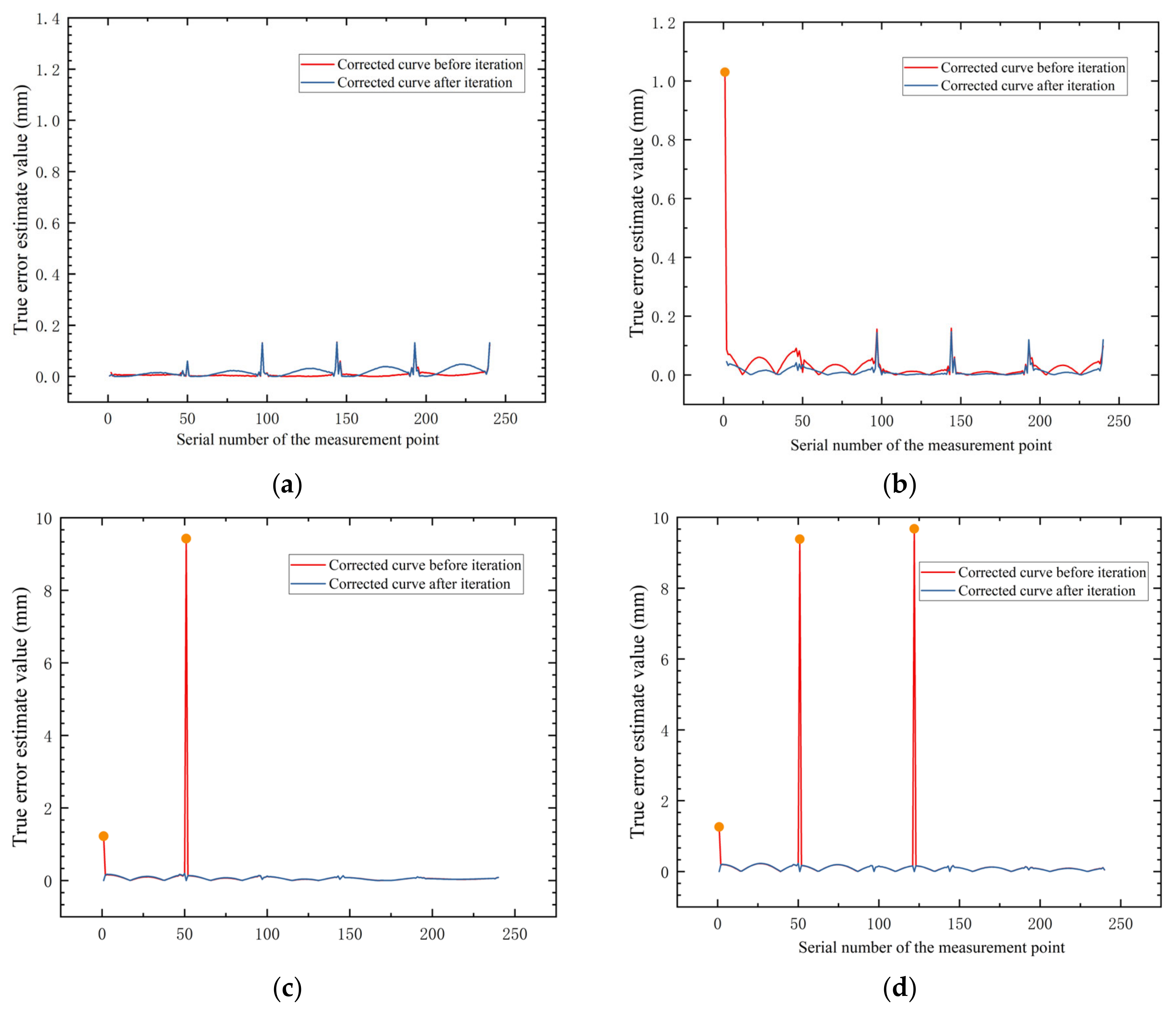
(2) By randomly inserting three gross error points, it was demonstrated that the cylindrical axis parameters calculated by the ISWLS method are stable when the data contain gross error points. The variation of cylindricity error is within 0.08 mm. The variation is smaller compared with the results without inserting gross error points, so the algorithm is able to resist gross errors.
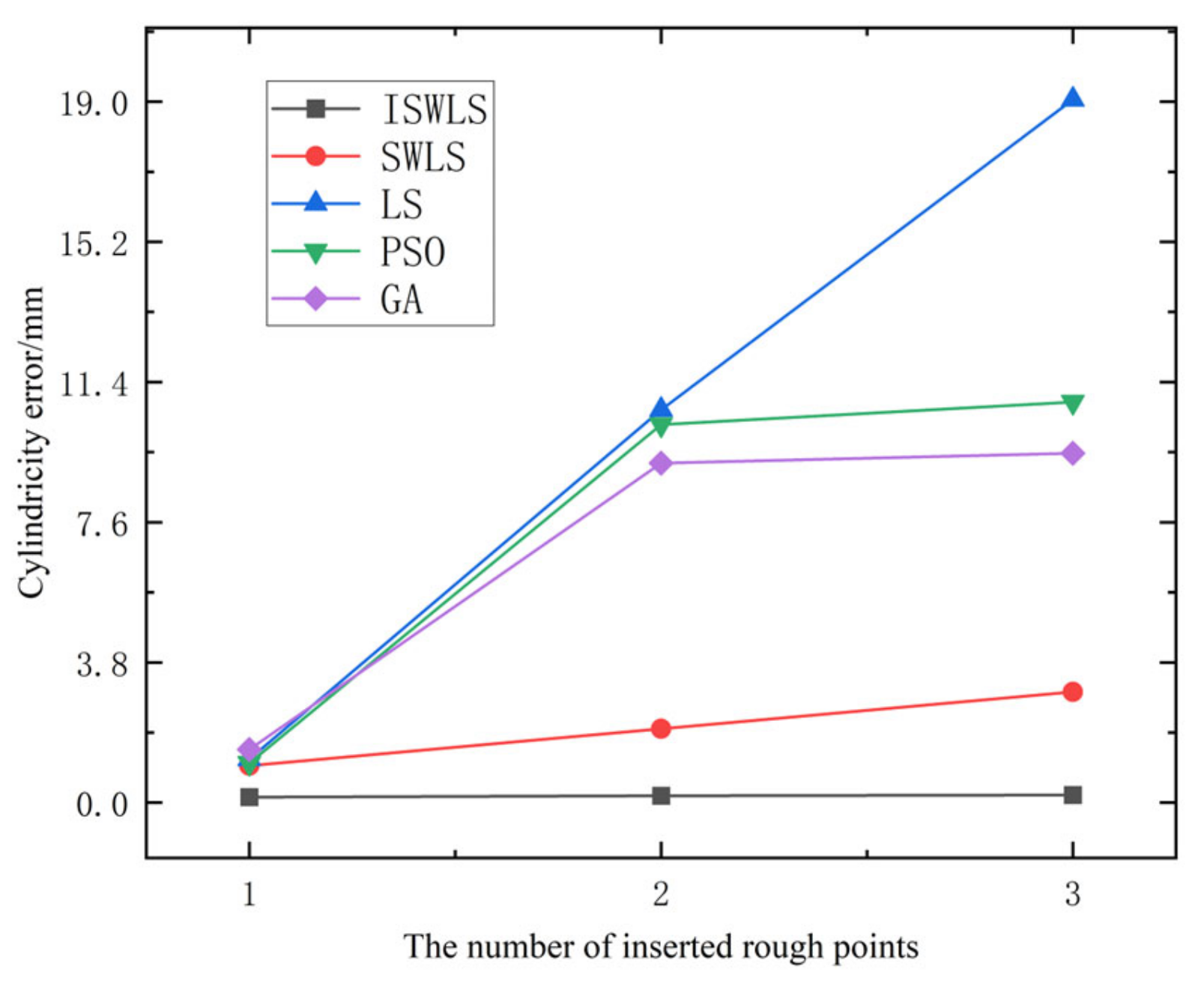
(3) In several experimental evaluations, compared with the particle swarm algorithm and genetic algorithm, the method in this paper took relatively less time and had faster computing power than the LS. In the experiment of inserting three gross error points, the LS method was most affected by the gross error points, and the standard PSO method and the standard GA method had less error increase in the cylindricity error value after the insertion of the second error point due to the advantage of the algorithm. The ISWLS method and the SWLS method have a certain resistance to gross errors. Compared with other algorithms, the cylindricity error assessment results did not increase significantly after inserting gross error points, the changes were relatively flat, and the ISWLS method was more resistant to gross errors than the SWLS method.
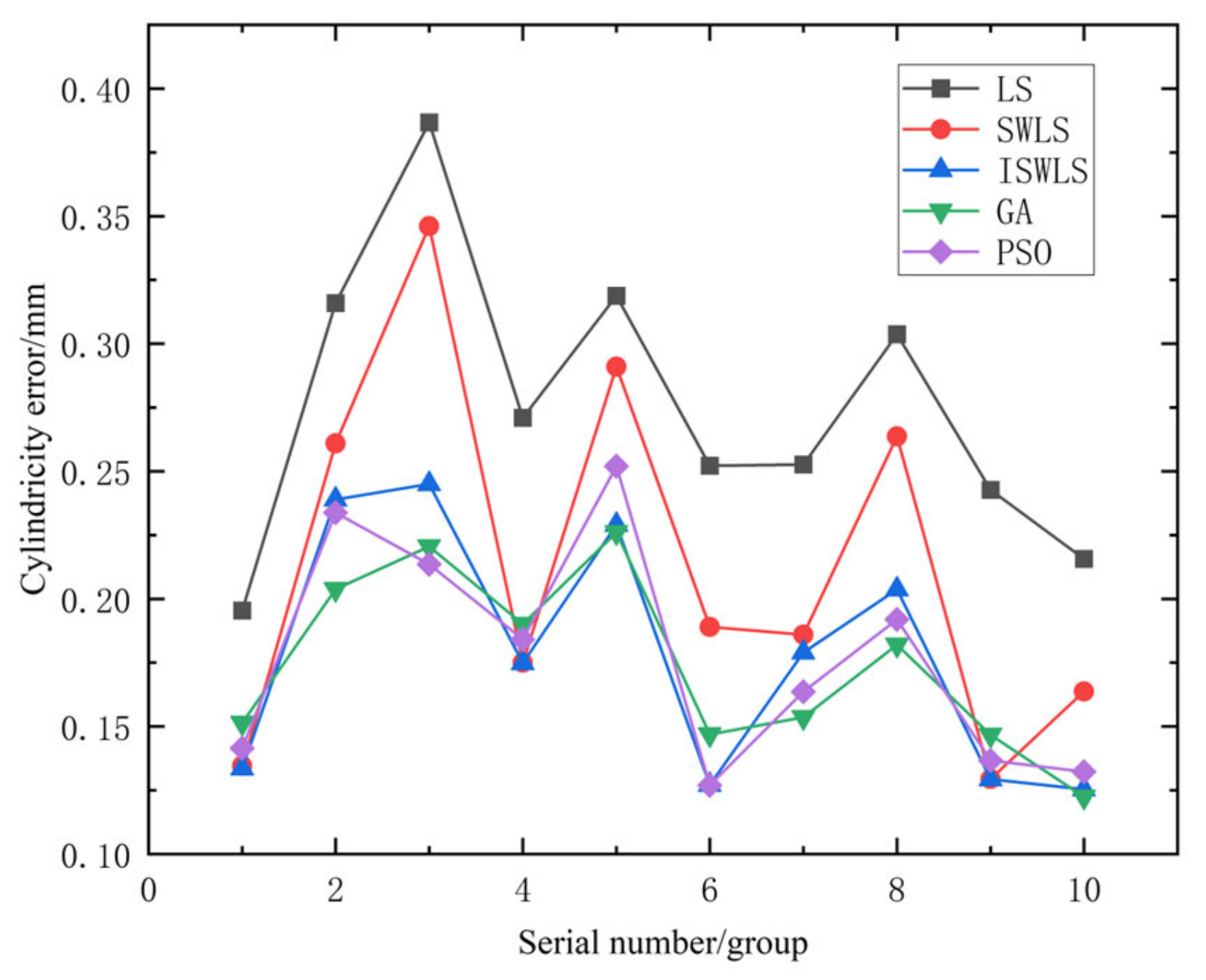
(4) The LS method, SWLS method, ISWLS, standard PSO method, and standard GA method were used to evaluate the model without inserting gross error points. Compared with other optimization algorithms, ISWLS has higher accuracy and stable arithmetic results with strong robustness. The results of the uncertainty evaluation experiments show that the GUM method results were verified by the MCM method, and thus the error uncertainty evaluation results are reliable. The ISWLS method has the robustness of the cylindrical error evaluation results. The algorithm can be extended to error evaluation.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}