
The Impact of Nonlinear Mobility Models on Straight Line Conflict Detection Algorithm for UAVs


Abstract
:1. Introduction
2. Unmanned Aerial Vehicle Mobility Model
3. Nonlinear Mobility Model
3.1. Gauss–Markov Mobility Model
3.1.1. Gauss–Markov Variables
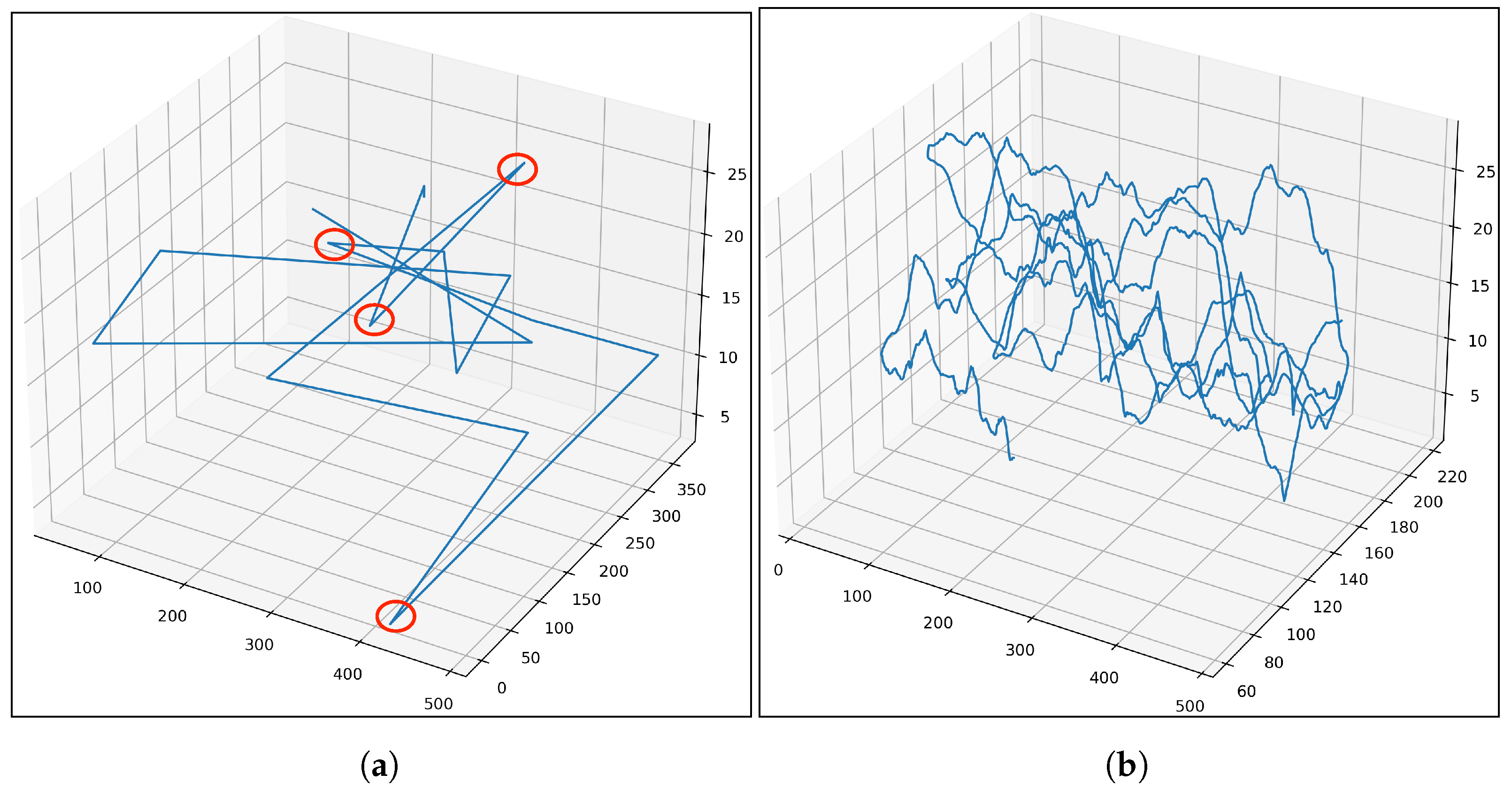
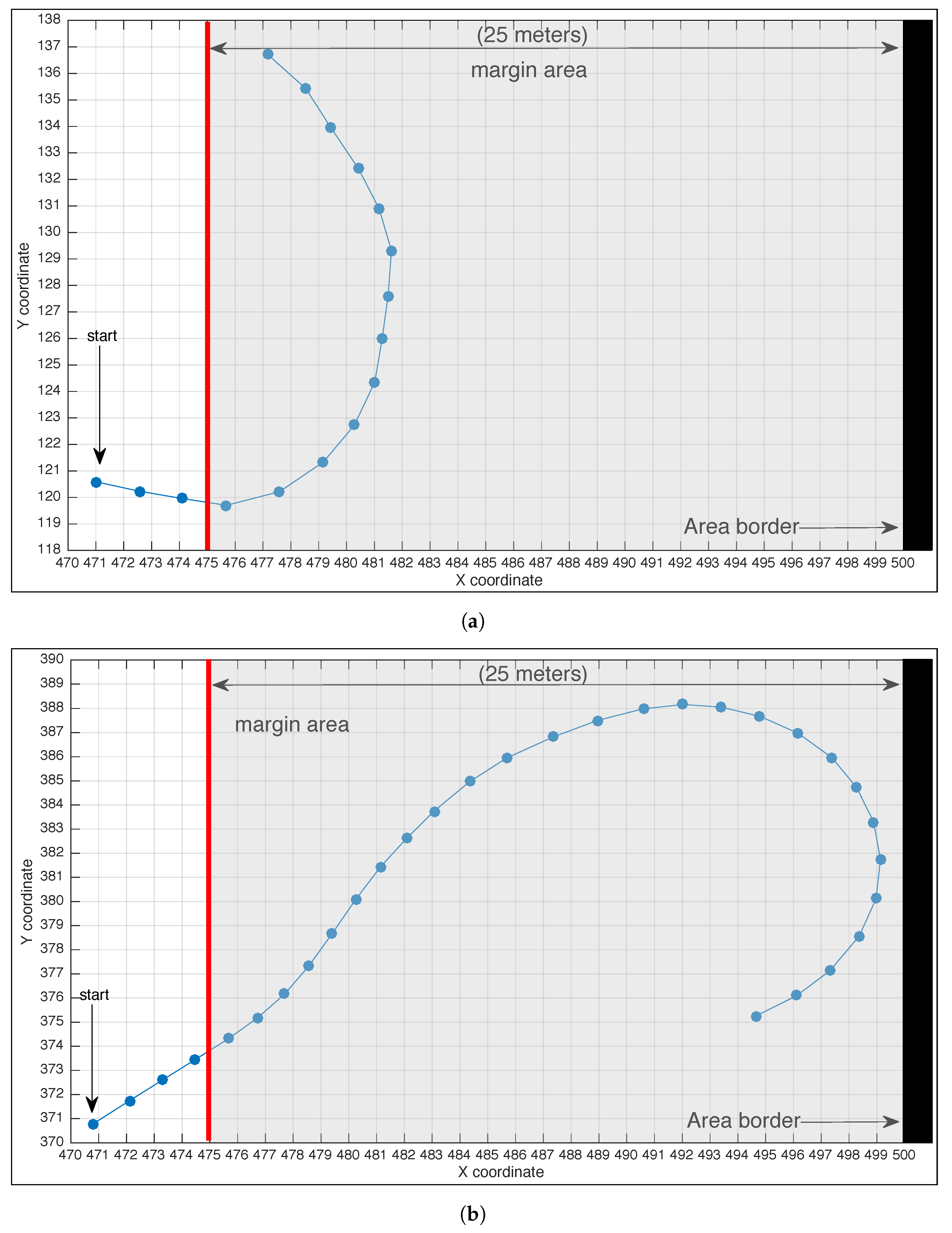
3.1.2. Boundary Handling
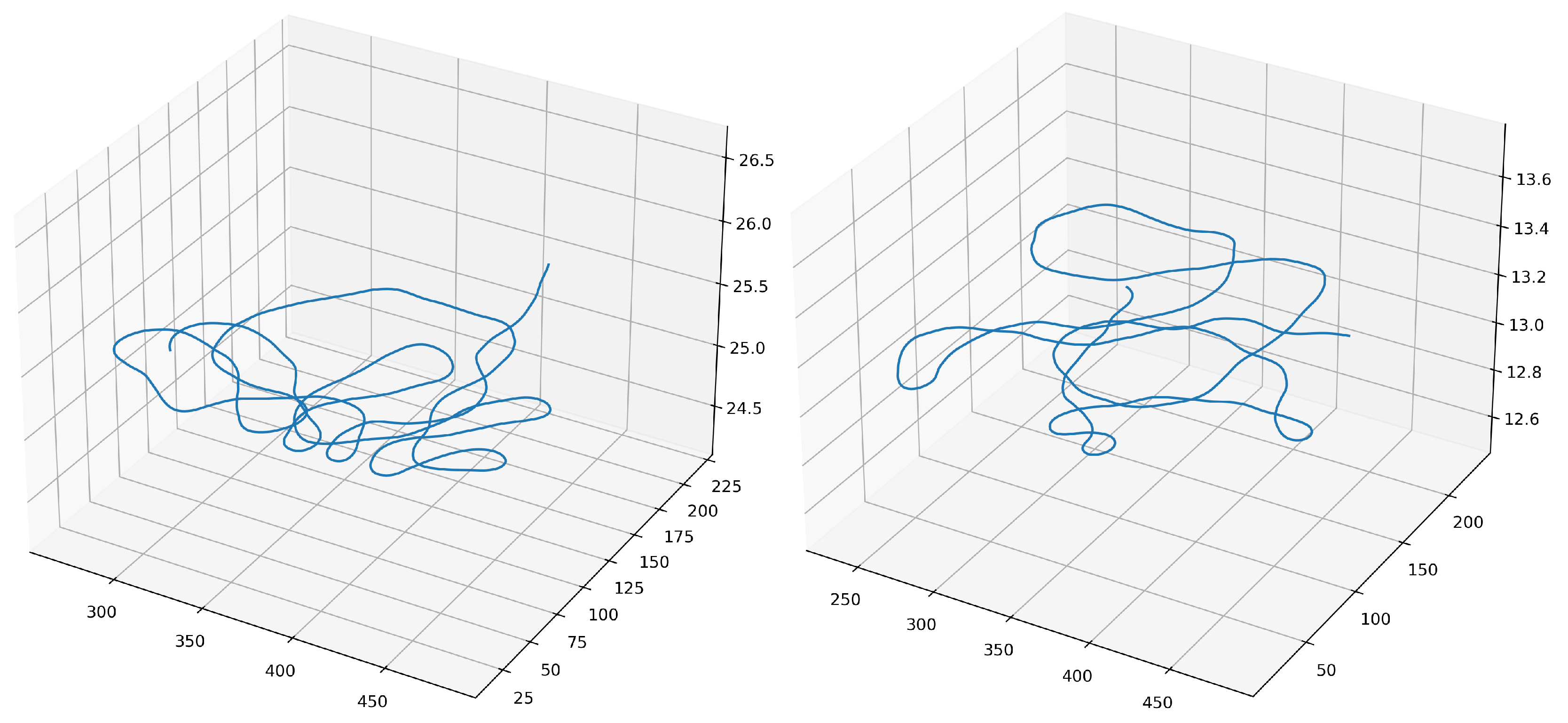
3.1.3. Extending GM to Three Dimensions
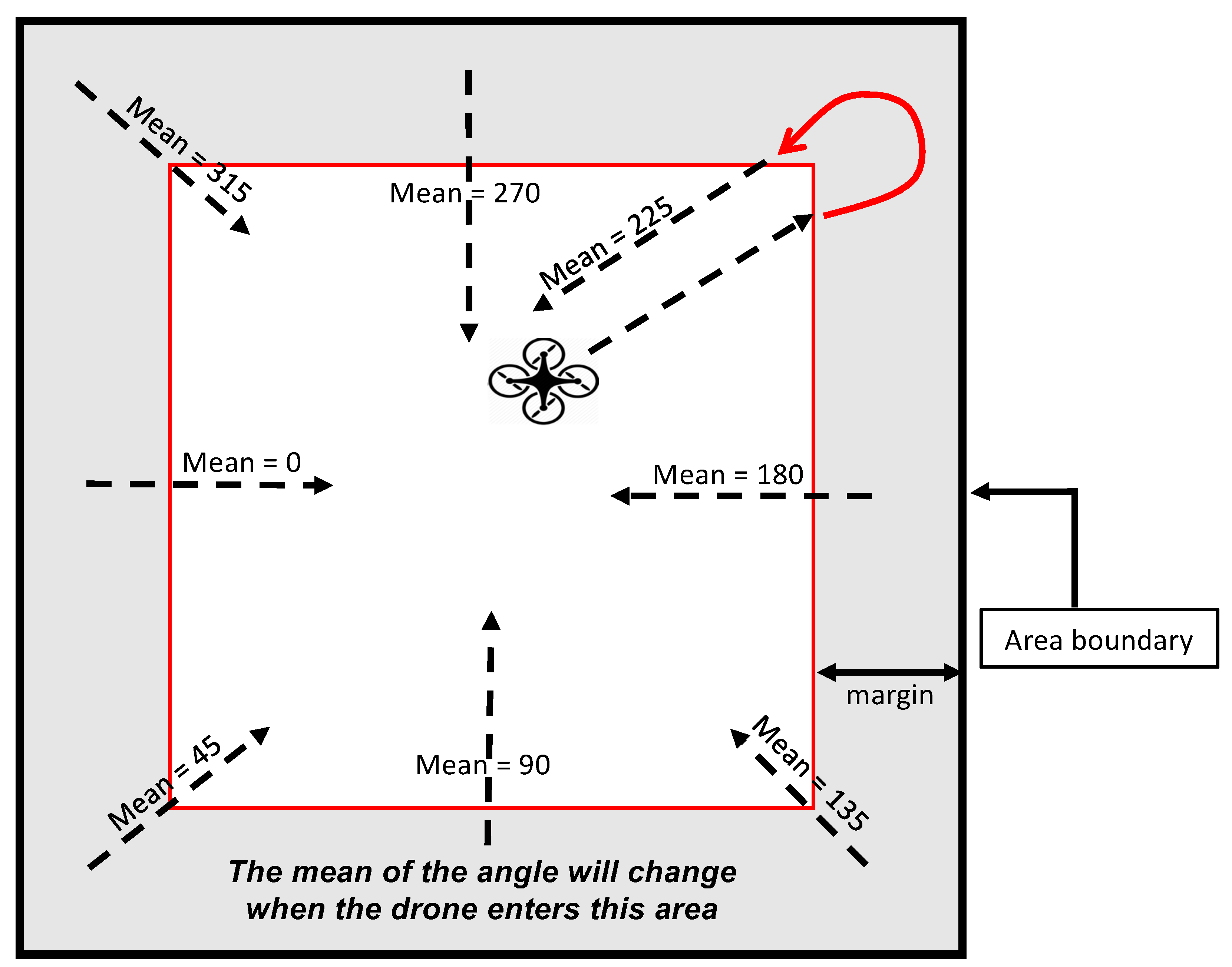
3.2. Enhanced Gauss–Markov
- The mean of the direction deviation will be changed to or (depending on the current direction of the UAV).
- Reduction of the variance of the Gaussian distribution to instead of 6.2.
4. Conflict Detection Algorithm (SLIDE)
- Input: and .
- Output: Whether the drone will encounter conflicts during the , and the timing of the conflicts (if any).
- Process: Each drone broadcast its information periodically every in a STATE message that contains the following:
- −
- Current position;
- −
- Current speed;
- −
- The protected zone radius.
When a drone receives the STATE message, it will calculate if there is a potential conflict during the , assuming that the two drones will continue in a straight line path. Each drone maintains a conflict table to record all information about conflicts, such as the identifiers of conflicting drones and the starting and ending time of the conflict. The start time of a conflict is when the overlap between the protected zones is expected to begin. The end time of a conflict is when the overlap between the protected zones is expected to finish. The conflict times are calculated using the drone’s local time, so there is no need for synchronization between the drone’s clocks.
5. Performance Evaluation
5.1. Simulation Setup
- N drones flying for 10 min in a confined space with the dimensions 500 m × 400 m × 30 m.
- All drones have the same protected zone radius R.
- All drones have the same communication range .
- The drones use IEEE 802.11 protocol to communicate with each other directly.
- The maximal back-off time is set to 1 s.
- The environment is static, with no obstacles except the other drones and the boundary limits.
5.2. Slide Behavior with Different Mobility Models
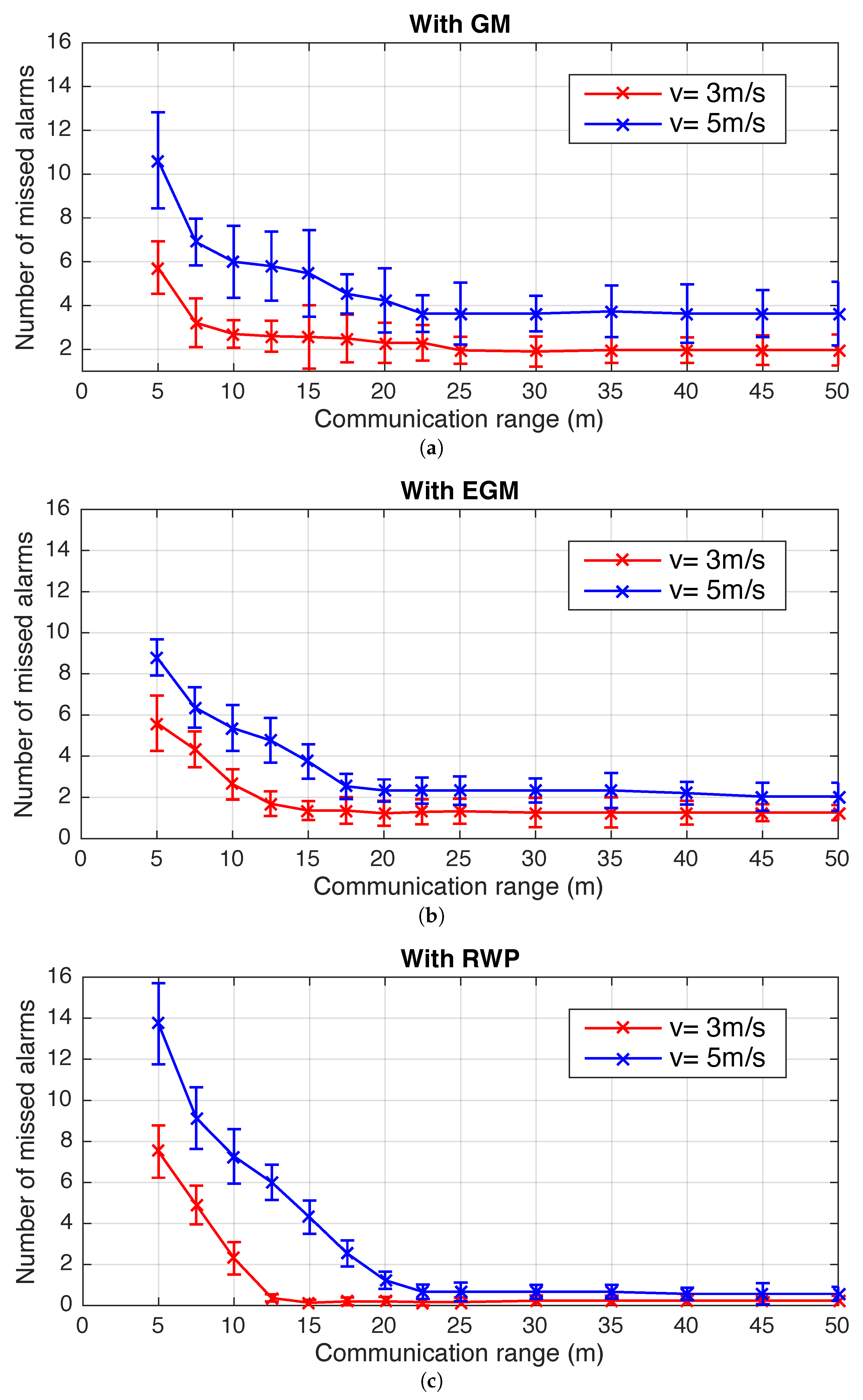
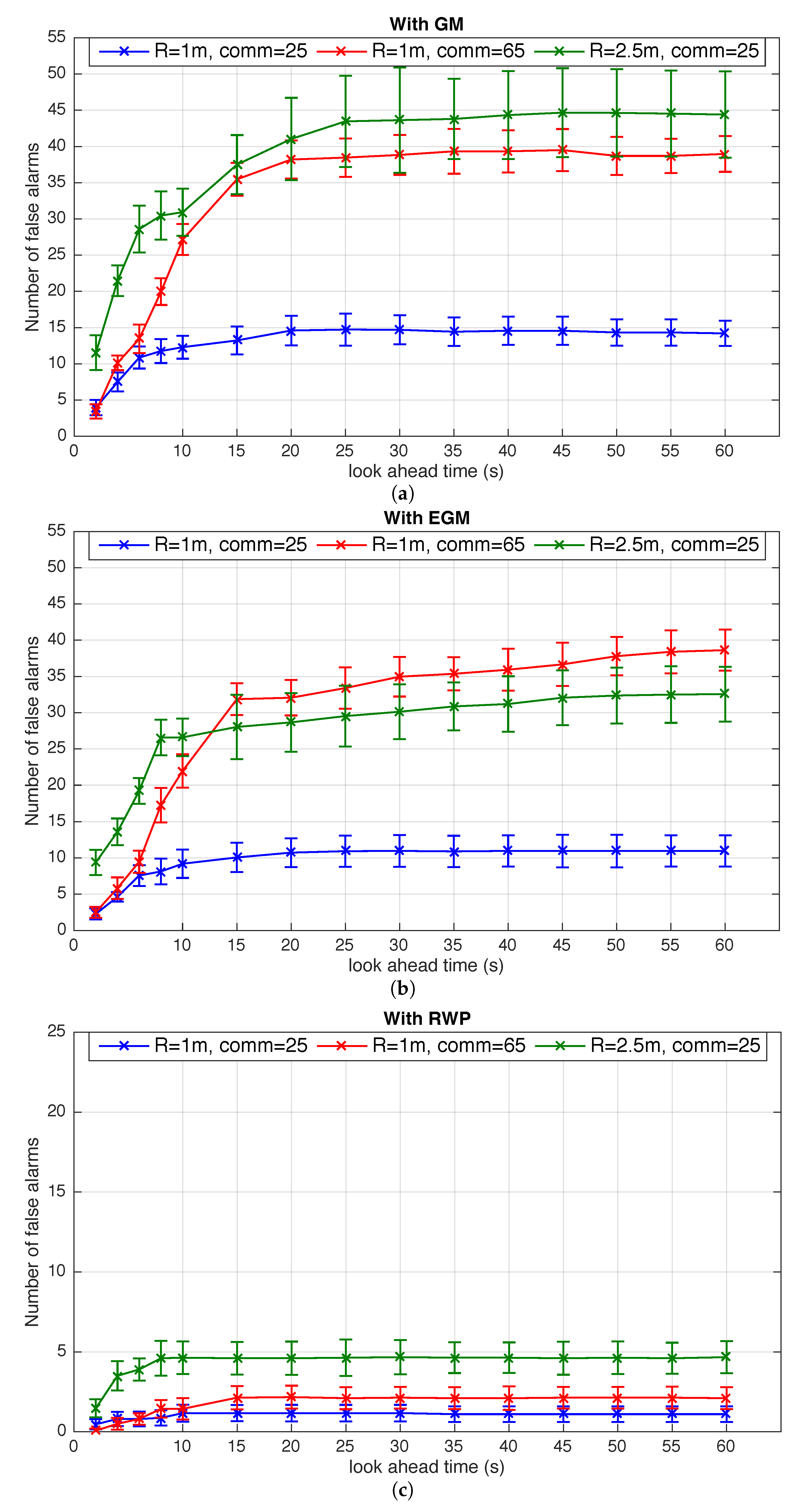
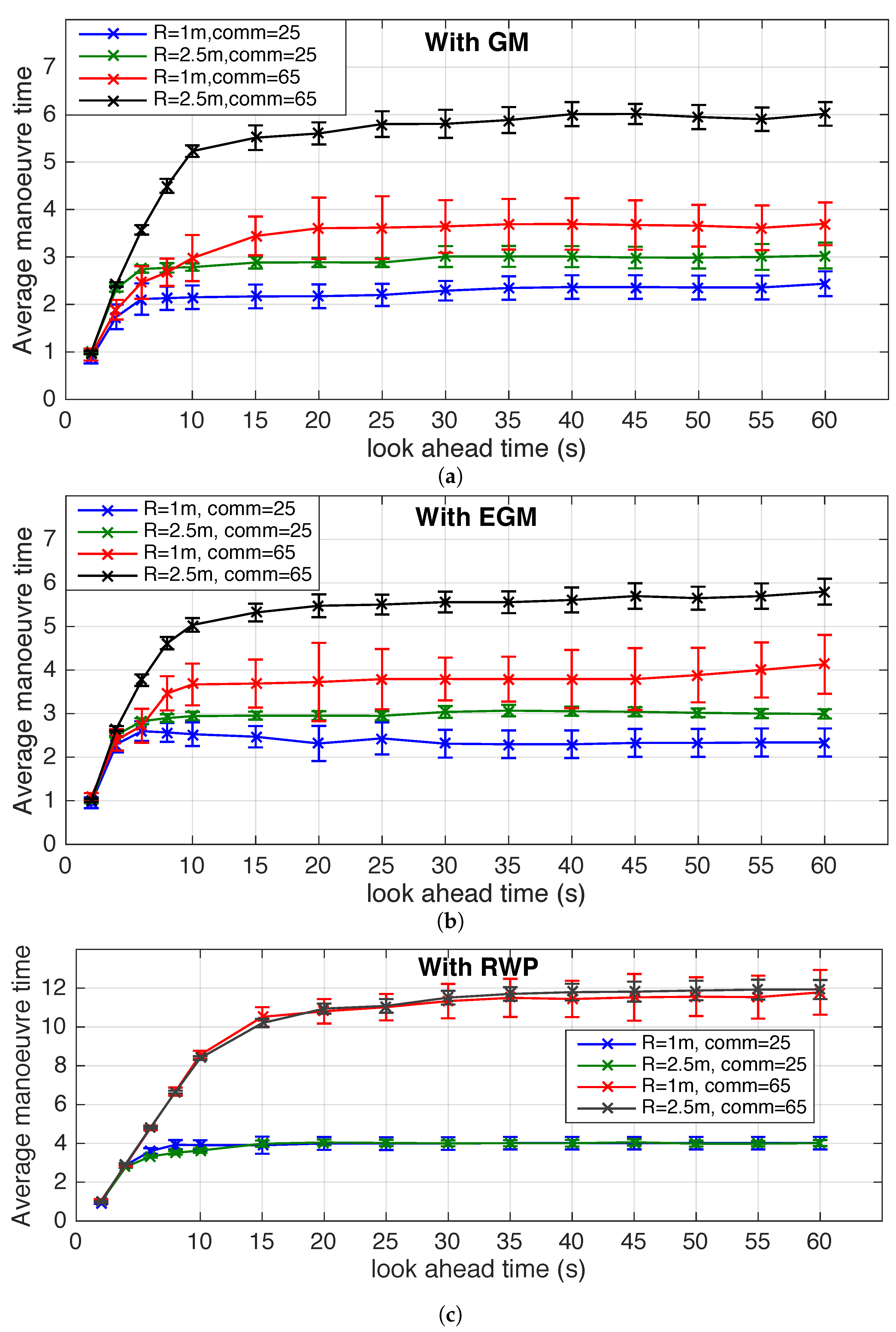
5.2.1. Effect of Simulation Parameters
5.2.2. SLIDE Scalability
5.2.3. Effect of Mobility Model Parameters
6. Discussion and Future Work
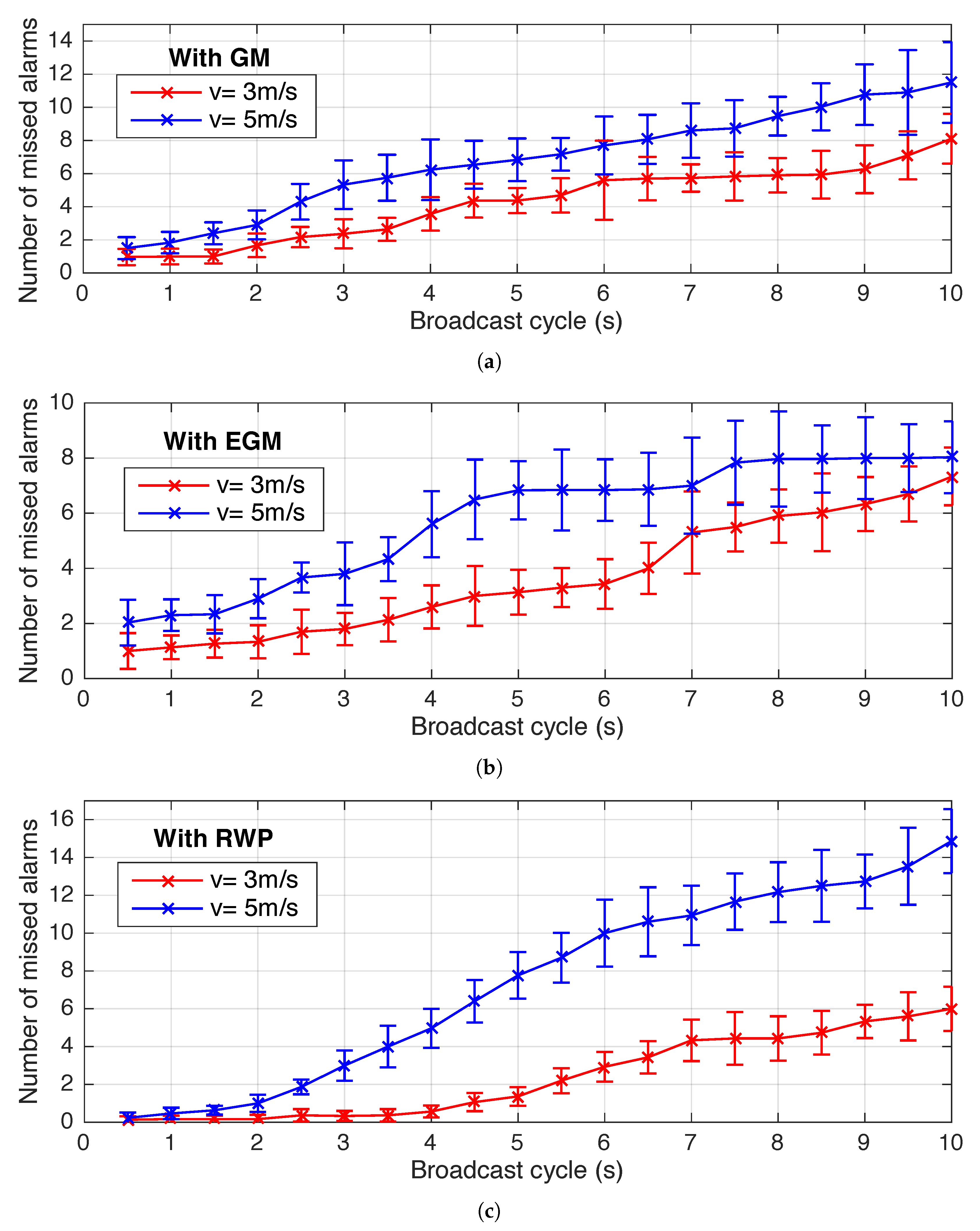
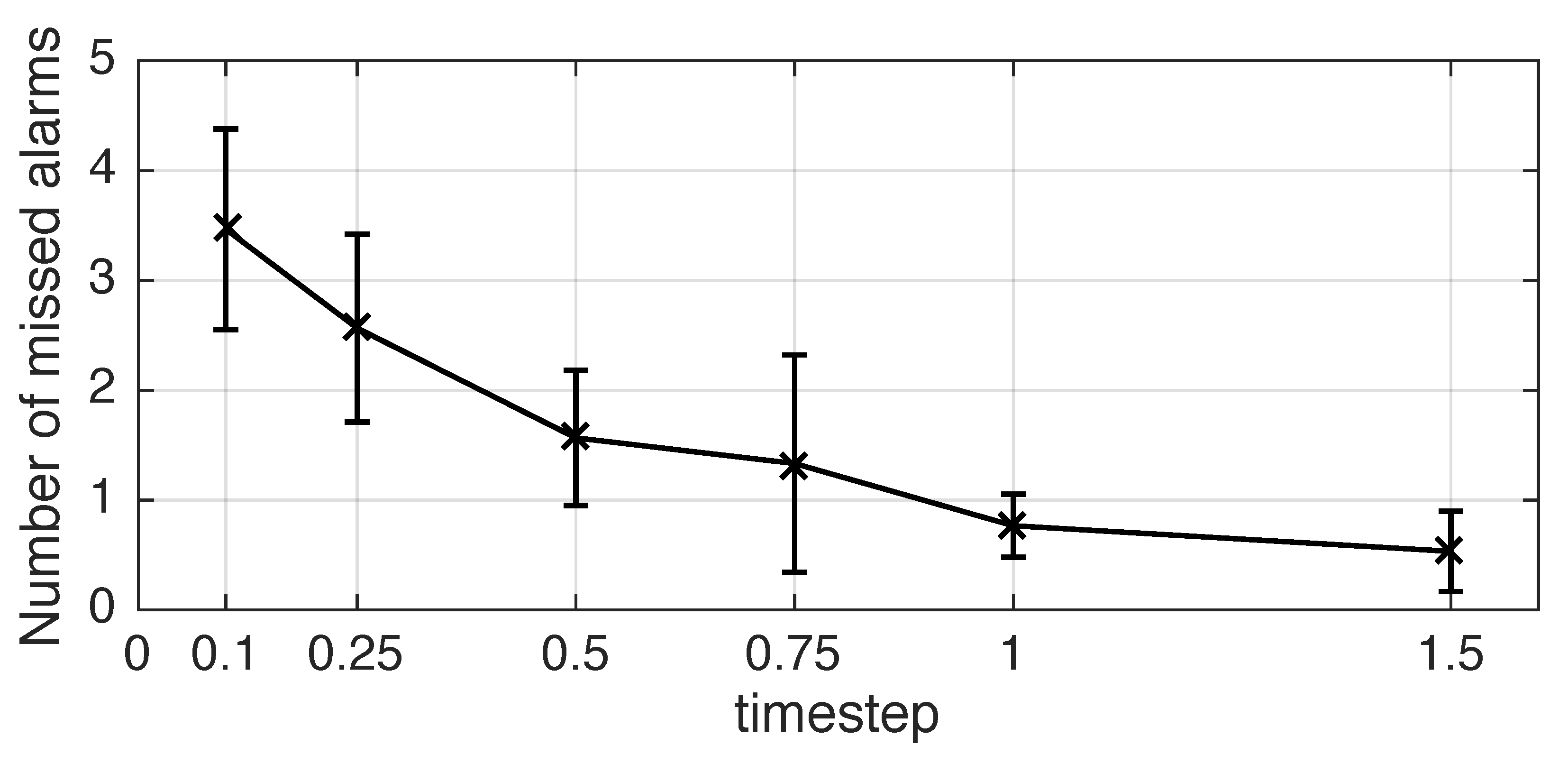
- Losing messages: This has more effect when using GM and EGM (or nonlinear) mobility, as the drone’s direction will change more frequently. However, when using RWP, if a message is received, the drone will stay on the same line for some time, so all (or most) conflicts within the look ahead time can be detected, even if the next message is lost. In other words, there are several chances to detect a conflict, especially with small broadcast cycles. Thus, to avoid losing messages or to minimize its effect, the broadcast cycle should be small, and the density of the drones must be suitable for the environment.
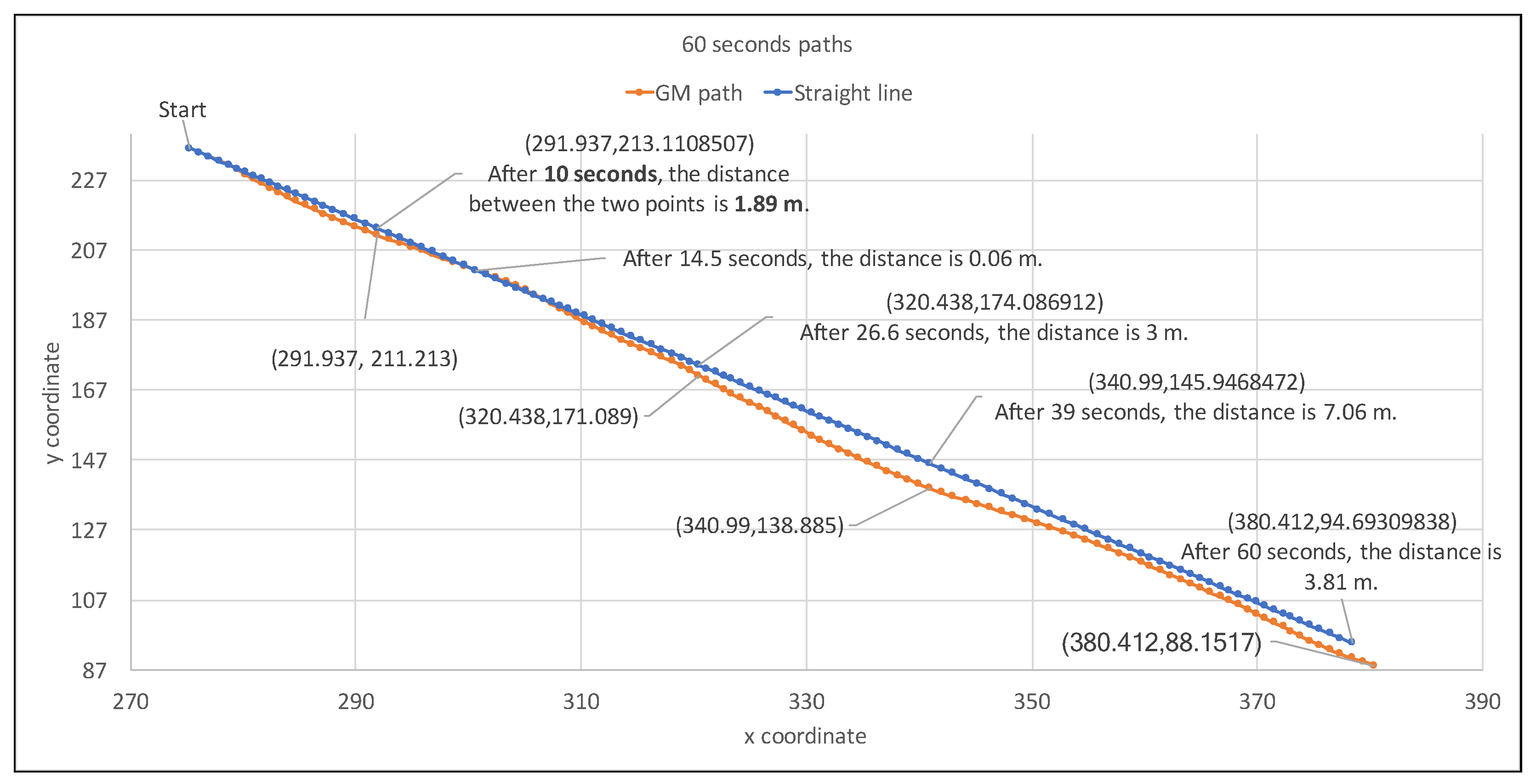
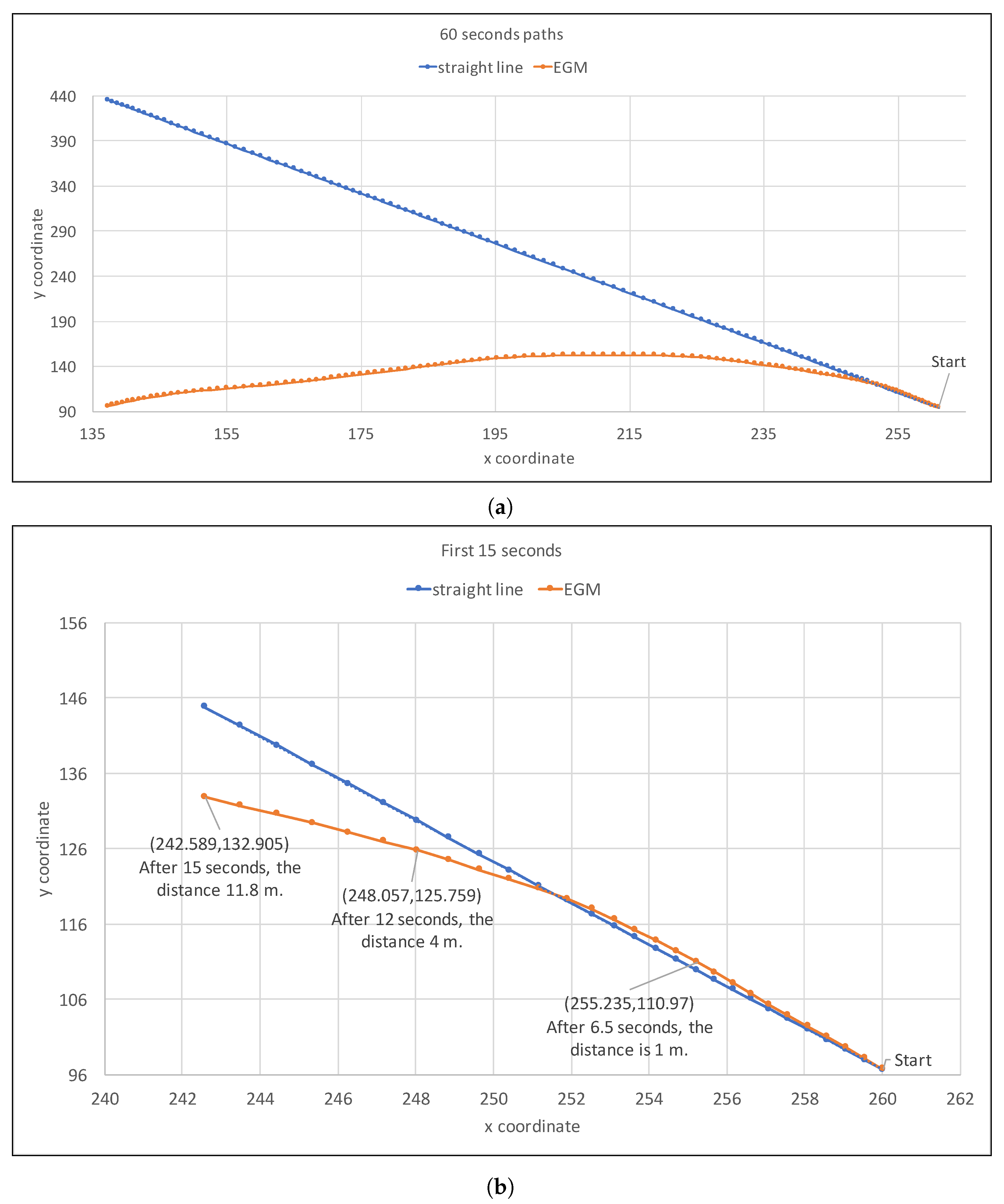
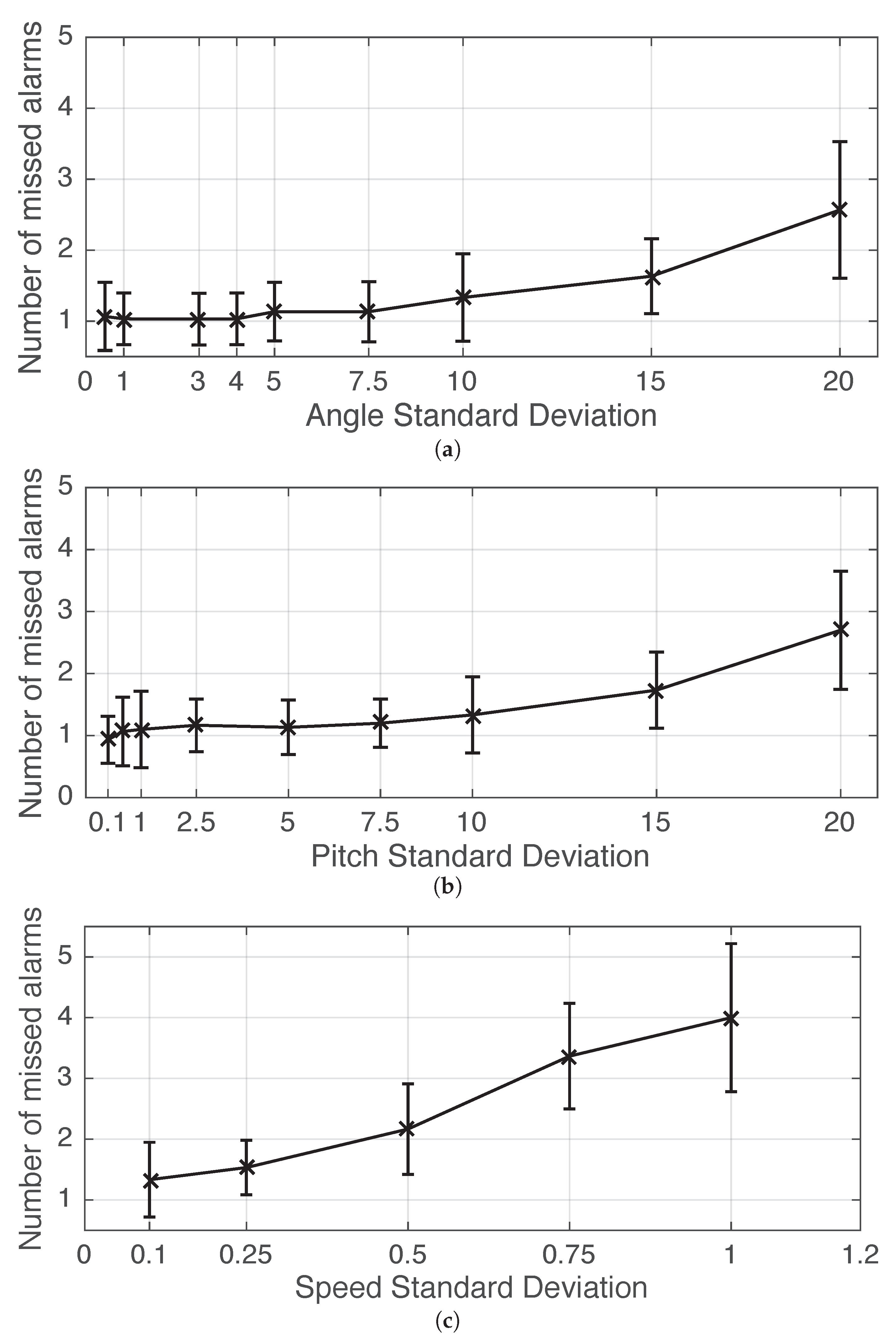
- Conflict time/place: SLIDE will not only predict if there is a conflict or not, but it also specifies the conflict interval, i.e., the time of the beginning of the conflict and the time of the end of the conflict. Using GM and EGM, the drones will change their heading at each step (the considered update interval is 0.5 s), and the actual position in the near future may differ from the predicted position by SLIDE. As an example, in one of the scenarios, a conflict between two drones happened at the time 20.5; SLIDE using GM predicts that the conflict will start at the time 21.1, the difference here is 0.6 s, and the algorithm considers this as undetected conflict (for the difference in timing). To minimize the errors in calculating the time and place, the changes in the angle and speed should not be large. For the experiments in Section 5.2.1, we tested the algorithm with high values for the standard deviations to present the general performance of the algorithm. The experiments in Section 5.2.3 show that the performance will improve when the standard deviations decrease.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Balsi, M.; Moroni, M.; Chiarabini, V.; Tanda, G. High-Resolution Aerial Detection of Marine Plastic Litter by Hyperspectral Sensing. Remote Sens. 2021, 13, 1557. [Google Scholar] [CrossRef]
- Filkin, T.; Sliusar, N.; Ritzkowski, M.; Huber-Humer, M. Unmanned Aerial Vehicles for Operational Monitoring of Landfills. Drones 2021, 5, 125. [Google Scholar] [CrossRef]
- Saponi, M.; Borboni, A.; Adamini, R.; Faglia, R.; Amici, C. Embedded Payload Solutions in UAVs for Medium and Small Package Delivery. Machines 2022, 10, 737. [Google Scholar] [CrossRef]
- Ho, Y.H.; Tsai, Y.J. Open Collaborative Platform for Multi-Drones to Support Search and Rescue Operations. Drones 2022, 6, 132. [Google Scholar] [CrossRef]
- Pasandideh, F.; da Costa, J.P.J.; Kunst, R.; Islam, N.; Hardjawana, W.; Pignaton de Freitas, E. A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies. Remote Sens. 2022, 14, 4459. [Google Scholar] [CrossRef]
- Mahjri, I.; Dhraief, A.; Belghith, A.; AlMogren, A.S. SLIDE: A Straight Line Conflict Detection and Alerting Algorithm for Multiple Unmanned Aerial Vehicles. IEEE Trans. Mob. Comput. 2018, 17, 1190–1203. [Google Scholar] [CrossRef]
- Wan, Y.; Tang, J.; Lao, S. Distributed Conflict-Detection and Resolution Algorithm for UAV Swarms Based on Consensus Algorithm and Strategy Coordination. IEEE Access 2019, 7, 100552–100566. [Google Scholar] [CrossRef]
- Yassein, M.B.; Alhuda, N. Flying ad-hoc networks: Routing protocols, mobility models, issues. Int. J. Adv. Comput. Sci. Appl. (IJACSA) 2016, 7. [Google Scholar] [CrossRef] [Green Version]
- Camp, T.; Boleng, J.; Davies, V. A survey of mobility models for ad hoc network research. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2022, 6, 9. [Google Scholar] [CrossRef]
- Brown, T.X.; Doshi, S.; Jadhav, S.; Himmelstein, J. Test Bed for a Wireless Network on Small UAVs. In Proceedings of the AIAA 3rd “Unmanned Unlimited” Technical Conference, Workshop and Exhibit, Chicago, IL, USA, 20–23 September 2004; pp. 20–23. [Google Scholar]
- Biomo, J.M.M.; Kunz, T.; St-Hilaire, M. An enhanced Gauss-Markov mobility model for simulations of unmanned aerial ad hoc networks. In Proceedings of the 2014 7th IFIP Wireless and Mobile Networking Conference (WMNC), Vilamoura, Portugal, 20–22 May 2014; pp. 1–8. [Google Scholar]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. In Proceedings of the 2006 International Conference on Wireless and Mobile Communications (ICWMC’06), Bucharest, Romania, 29–31 July 2006; p. 33. [Google Scholar]
- Liang, B.; Haas, Z.J. Predictive distance-based mobility management for PCS networks. In Proceedings of the IEEE INFOCOM’99. Conference on Computer Communications. Proceedings. Eighteenth Annual Joint Conference of the IEEE Computer and Communications Societies. The Future is Now (Cat. No. 99CH36320), New York, NY, USA, 21–25 March 1999; Volume 3, pp. 1377–1384. [Google Scholar]
- Bai, F.; Helmy, A. A survey of mobility models. Wirel. Adhoc Netw. Univ. South. Calif. USA 2004, 206, 147. [Google Scholar]
- Li, Y.; Wang, W.; Gao, H.; Wu, Y.; Su, M.; Wang, J.; Liu, Y. Air-to-ground 3D channel modeling for UAV based on Gauss-Markov mobile model. AEU—Int. J. Electron. Commun. 2020, 114, 152995. [Google Scholar] [CrossRef]
- Jo, Y.i.; Lee, S.; Kim, K.H. Overlap Avoidance of Mobility Models for Multi-UAVs Reconnaissance. Appl. Sci. 2020, 10, 4051. [Google Scholar] [CrossRef]
- Anjum, M.N.; Wang, H. Mobility Modeling and Stochastic Property Analysis of Airborne Network. IEEE Trans. Netw. Sci. Eng. 2020, 7, 1282–1294. [Google Scholar] [CrossRef]
- Chen, Y.J.; Liao, K.M.; Ku, M.L.; Tso, F.P.; Chen, G.Y. Multi-Agent Reinforcement Learning Based 3D Trajectory Design in Aerial-Terrestrial Wireless Caching Networks. IEEE Trans. Veh. Technol. 2021, 70, 8201–8215. [Google Scholar] [CrossRef]
- Korneev, D.A.; Leonov, A.V.; Litvinov, G.A. Estimation of Mini-UAVs Network Parameters for Search and Rescue Operation Scenario with Gauss-Markov Mobility Model. In Proceedings of the 2018 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Minsk, Belarus, 4–5 July 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Roy, R.R. Random Gauss–Markov Mobility. In Handbook of Mobile Ad Hoc Networks for Mobility Models; Springer: Boston, MA, USA, 2011; pp. 311–344. [Google Scholar] [CrossRef]
- Amoussou, G.; Mahanna, H.; Zblgnlew, D.; Kadoch, M. An OpNet implementation of Gauss-Markov mobility model and integration of link prediction algorithm in DSR protocol: A cross-layer approach. In Proceedings of the OPNETWORK 2005, Washington, DC, USA, 12–14 October 2005; pp. 22–26. [Google Scholar]
- Tolety, V. Load Reduction in Ad Hoc Networks Using Mobile Servers. Master’s Thesis, Colorado School of Mines, Golden, CO, USA, 1999. [Google Scholar]
- Alenazi, M.; Sahin, C.; Sterbenz, J.P. Design Improvement and Implementation of 3D Gauss-Markov Mobility Model; Technical Report; Air Force Test Center: Edwards Air Force Base, CA, USA, 2013. [Google Scholar]
- Rohrer, J.P.; Çetinkaya, E.K.; Narra, H.; Broyles, D.; Peters, K.; Sterbenz, J.P.G. AeroRP performance in highly-dynamic airborne networks using 3D Gauss-Markov mobility model. In Proceedings of the 2011-MILCOM 2011 Military Communications Conference, Baltimore, MD, USA, 7–10 November 2011; pp. 834–841. [Google Scholar] [CrossRef]
- Varga, A. The omnet++ discrete event simulation system. In Proceedings of the ESM’01, Prague, Czech Republic, 6–9 June 2001. [Google Scholar]
- Krajník, T.; Vonásek, V.; Fišer, D.; Faigl, J. AR-Drone as a Platform for Robotic Research and Education. In Proceedings of the Research and Education in Robotics-EUROBOT 2011, Prague, Czech Republic, 15–17 June 2011; Obdržálek, D., Gottscheber, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 172–186. [Google Scholar]
- Peters, K.J. Design and Performance Analysis of a Geographic Routing Protocol for Highly Dynamic MANETs. Ph.D. Thesis, University of Kansas, Lawrence, KS, USA, 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of drones | 40 |
| Area dimensions | 500 × 400 × 30 |
| Simulation time | 600 s |
| Back-off time | 1 s |
| Parameters | GM | EGM |
|---|---|---|
| alpha | 0.86 | 0.86 |
| Speed standard deviation | 0.1 | 0.1 |
| Pitch standard deviation | 10 | 0 (fixed altitude) |
| Angle standard deviation | 10 | - |
| Direction standard deviation | - | 2.49 |
| Time step (updateInterval) | 0.5 | 0.5 |
| Margin | 25 m for v = 3 & 40 m for v = 5 | 25 m for v = 3 & 40 m for v = 5 |
| With GM | Tl = 2 s v = 3 m/s | Tl = 2 s v = 5 m/s | Tl = 8 s v = 3 m/s | Tl = 8 s v = 5 m/s |
|---|---|---|---|---|
| 450 × 350 × 30 | 4.90 | 13.00 | 14.97 | 20.07 |
| 500 × 400 × 30 | 3.97 | 9.23 | 11.77 | 14.57 |
| 500 × 400 × 35 | 2.77 | 7.80 | 8.93 | 13.30 |
| 550 × 450 × 35 | 1.63 | 5.80 | 6.73 | 11.20 |
| With EGM | ||||
| 450 × 350 × 30 | 3.47 | 10.70 | 10.07 | 14.73 |
| 500 × 400 × 30 | 2.27 | 7.57 | 8.13 | 12.37 |
| 500 × 400 × 35 | 2.33 | 6.41 | 6.60 | 10.33 |
| 550 × 450 × 35 | 1.53 | 5.60 | 5.48 | 8.38 |
| With RWP | ||||
| 450 × 350 × 30 | 0.37 | 1.00 | 0.87 | 1.67 |
| 500 × 400 × 30 | 0.47 | 0.67 | 0.87 | 1.57 |
| 500 × 400 × 35 | 0.33 | 0.70 | 0.77 | 1.20 |
| 550 × 450 × 35 | 0.17 | 0.23 | 0.60 | 0.87 |
| Number of UAVs | 40 | 60 | 80 | 100 | 120 |
|---|---|---|---|---|---|
| With GM | |||||
| Actual conflicts | 8.40 | 21.47 | 36.40 | 58.47 | 84.00 |
| Number of missed alarms | 1.67 | 3.37 | 5.50 | 9.40 | 14.07 |
| Number of false alarms | 11.77 | 27.87 | 46.20 | 72.63 | 98.10 |
| Missed alarms probability | 0.20 | 0.16 | 0.15 | 0.16 | 0.17 |
| False alarms probability | 1.75 | 1.54 | 1.50 | 1.48 | 1.40 |
| Maneuver time (s) | 2.13 | 2.13 | 2.20 | 2.20 | 2.33 |
| With EGM | |||||
| Actual conflicts | 8.73 | 20.40 | 34.47 | 55.20 | 80.87 |
| Number of missed alarms | 1.33 | 3.23 | 4.83 | 9.27 | 13.97 |
| Number of false alarms | 8.13 | 19.63 | 32.30 | 54.37 | 75.73 |
| Missed alarms probability | 0.15 | 0.16 | 0.14 | 0.17 | 0.17 |
| False alarms probability | 1.10 | 1.14 | 1.09 | 1.18 | 1.13 |
| Maneuver time (s) | 2.57 | 2.56 | 2.72 | 2.79 | 2.74 |
| With RWP | |||||
| Actual conflicts | 13.07 | 26.33 | 52.13 | 77.73 | 108.53 |
| Number of missed alarms | 0.37 | 0.90 | 1.93 | 3.20 | 3.93 |
| Number of false alarms | 0.83 | 1.97 | 2.60 | 4.50 | 5.83 |
| Missed alarms probability | 0.03 | 0.03 | 0.04 | 0.04 | 0.04 |
| False alarms probability | 0.07 | 0.08 | 0.05 | 0.06 | 0.06 |
| Maneuver time (s) | 3.43 | 3.24 | 3.26 | 3.22 | 3.25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alajlan, M.; Belghith, A. The Impact of Nonlinear Mobility Models on Straight Line Conflict Detection Algorithm for UAVs. Appl. Sci. 2022, 12, 12822. https://doi.org/10.3390/app122412822
Alajlan M, Belghith A. The Impact of Nonlinear Mobility Models on Straight Line Conflict Detection Algorithm for UAVs. Applied Sciences. 2022; 12(24):12822. https://doi.org/10.3390/app122412822
Chicago/Turabian StyleAlajlan, Maram, and Abdelfettah Belghith. 2022. "The Impact of Nonlinear Mobility Models on Straight Line Conflict Detection Algorithm for UAVs" Applied Sciences 12, no. 24: 12822. https://doi.org/10.3390/app122412822
APA StyleAlajlan, M., & Belghith, A. (2022). The Impact of Nonlinear Mobility Models on Straight Line Conflict Detection Algorithm for UAVs. Applied Sciences, 12(24), 12822. https://doi.org/10.3390/app122412822