
Rapid Prediction of Seismic Incident Angle’s Influence on the Damage Level of RC Buildings Using Artificial Neural Networks



Abstract
:1. Introduction
2. Short Theoretical Background
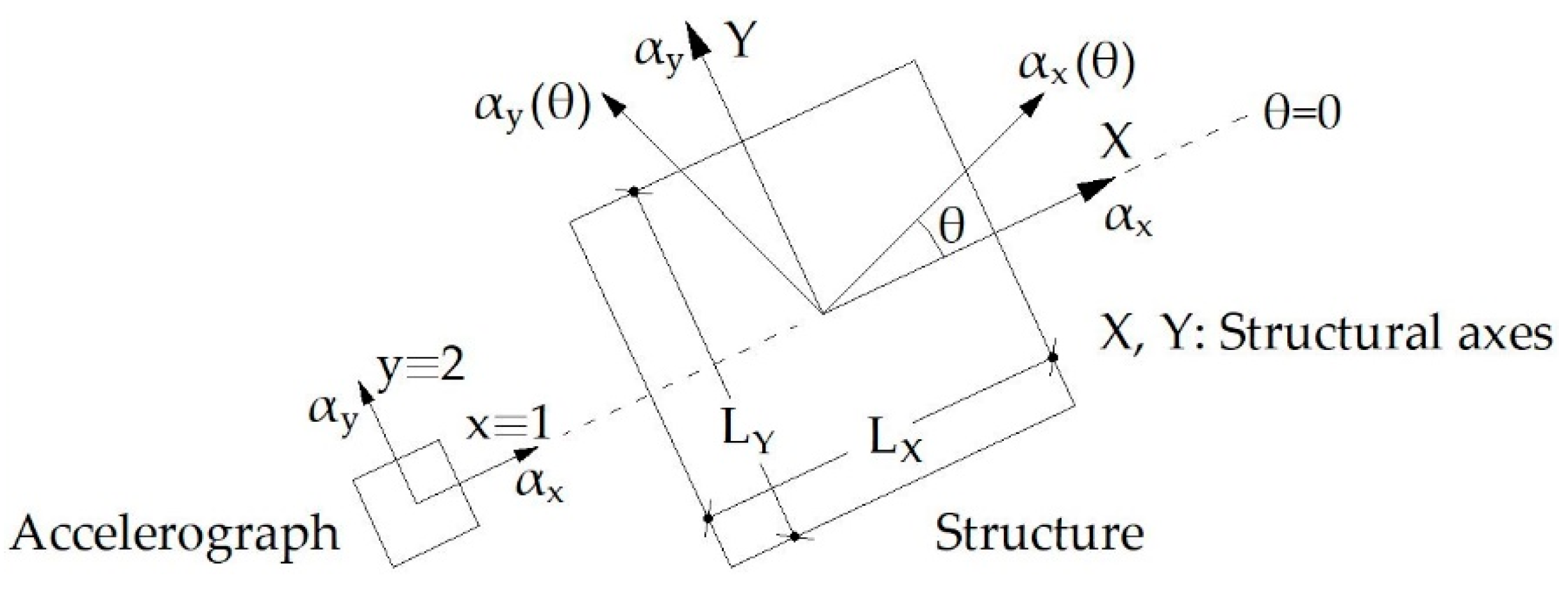
2.1. The Influence of Incident Angle on the Seismic Response of RC Buildings
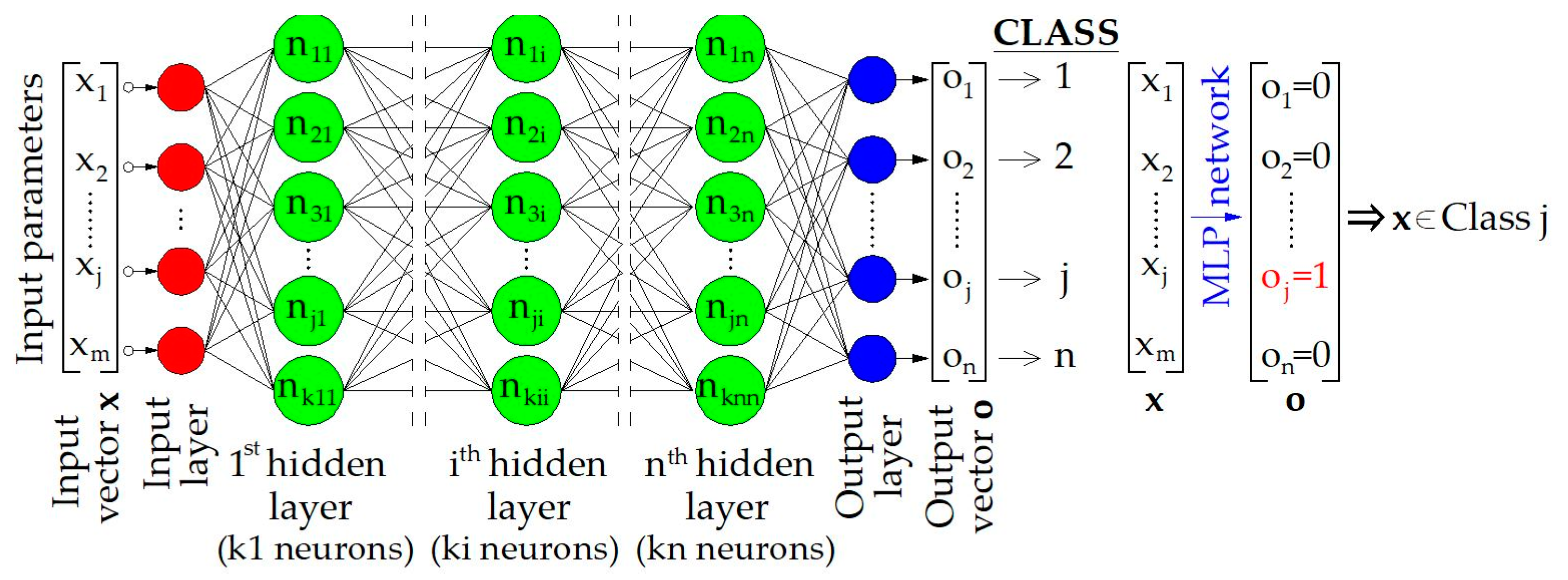
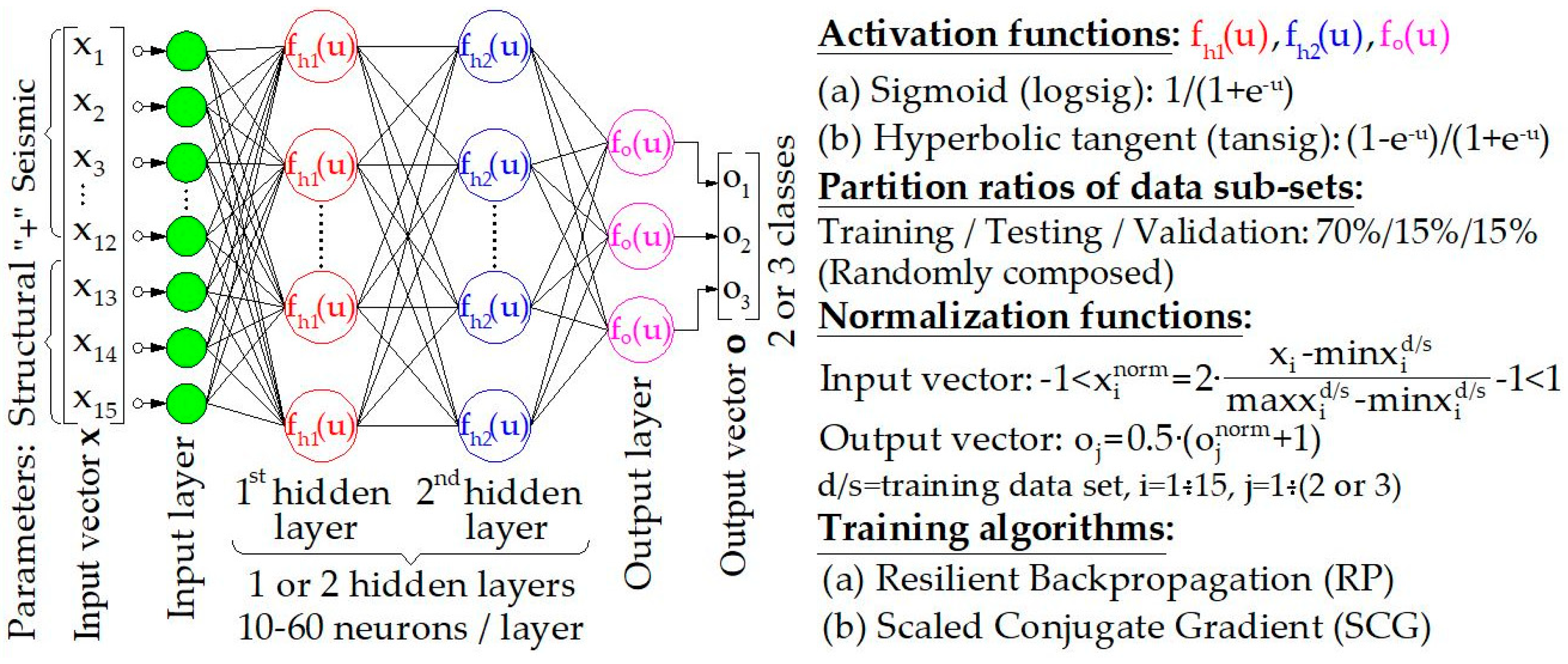
2.2. The Solution of the PR Problem Using MLP Networks
3. Description and Formulation of the Problem in Terms Compatible with MLP Networks
3.1. General Description of the Problem and the Benefits of the Solution Using MLP Networks
3.2. Formulation of the Problem in Terms Compatible with MLP Networks
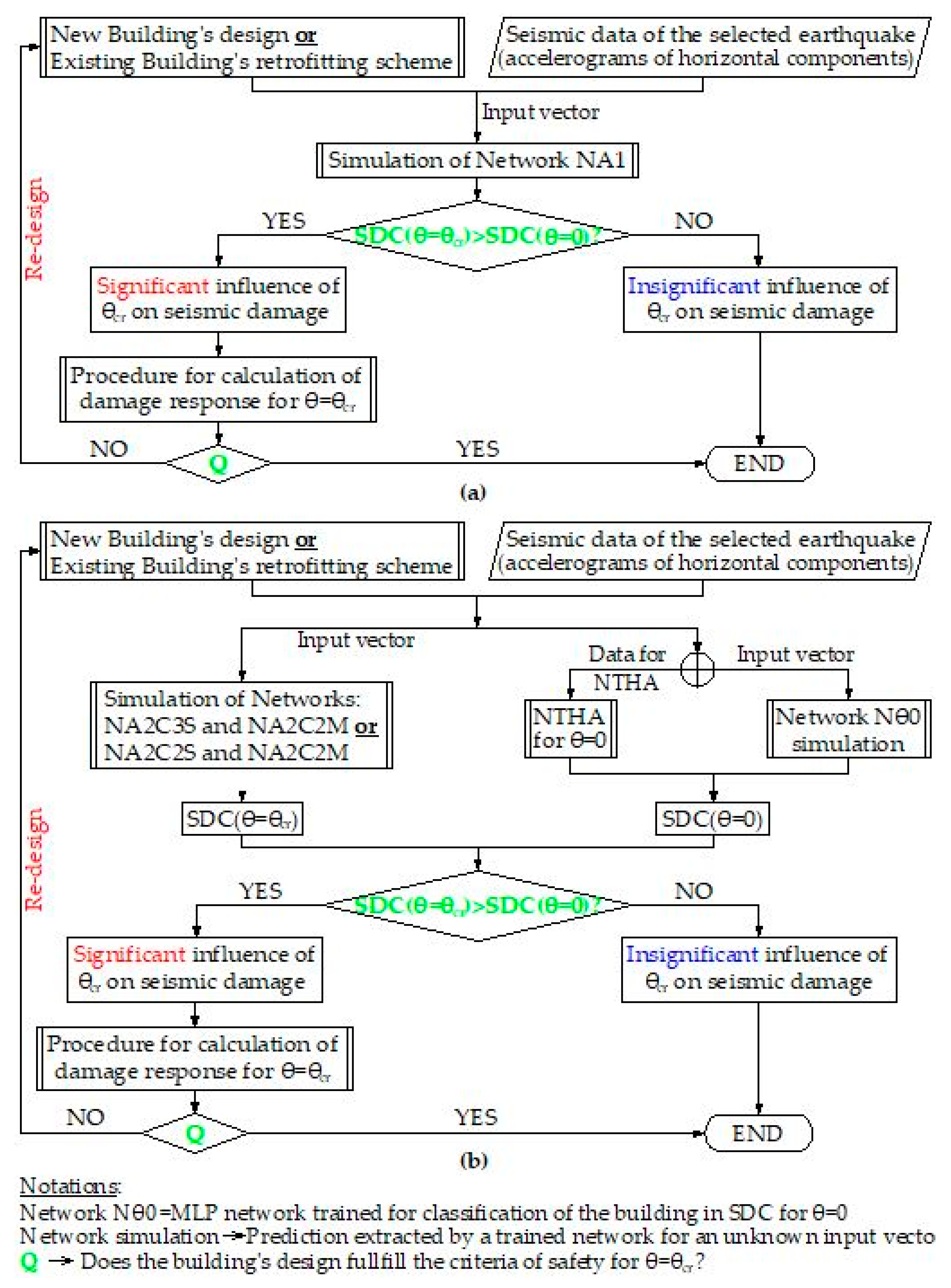
- First Approach (Approach 1 or A1). Definition of two classes: the class of buildings for which the SDC for θ = 0—i.e., SDC (θ = 0)—is changed for θ = θcr (i.e., if MIDR < 0.5% for θ = 0 becomes MIDR > 0.5% for θ = θcr, or if 0.5% < MIDR < 1.0% for θ = 0 becomes MIDR > 1.0% for θ = θcr), and the class of buildings for which the SDC for θ = 0, SDC (θ = 0), is not changed for θ = θcr (i.e., if MIDR < 0.5% for θ = 0 remains MIDR < 0.5% for θ = θcr, or if 0.5% < MIDR < 1.0% for θ = 0 remains 0.5% < MIDR < 1.0% for θ = θcr). It must be noted that the case in which MIDR (θ = 0) > 1.0% is not considered herein, because if a building suffers heavy damage for θ = 0, its SDC cannot be changed for θ = θcr. In other words, A1 corresponds to a two-class PR problem, the solution of which leads to the answer to the question of whether the SDC of an RC building for θ = 0 (SDC (θ = 0)) is increased for θ = θcr (i.e., SDC (θ = θcr) > SDC (θ = 0) → significant influence of θcr) or not (i.e., SDC (θ = θcr) = SDC (θ = 0) → insignificant influence of θcr), regardless of the SDC for θ = 0 (MIDR (θ = 0) < 0.5% or 0.5% < MIDR (θ = 0) < 1.0%). This approach does not give additional information about the magnitude of change of SDC for θ = θcr, but simply gives the information about the change (or not) in SDC;
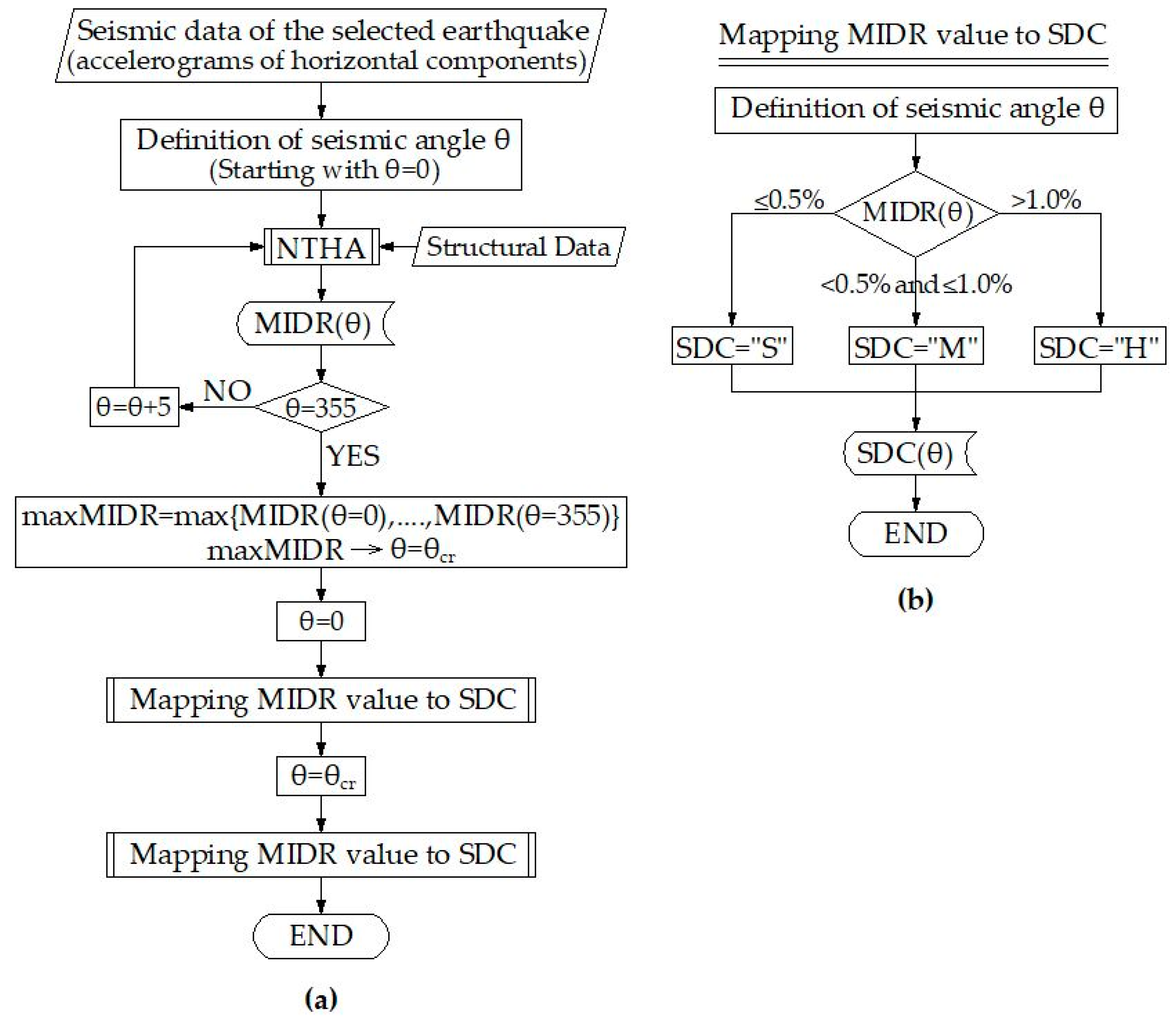
- Second Approach (Approach 2 or A2). In the framework of the second approach, more details about the influence of θcr on the SDC can be extracted. To this end, the buildings are separated into two categories: the buildings that are classified to the “S” SDC for θ = 0 (i.e., MIDR (θ = 0) < 0.5%), and those that are classified to the “M” SDC for θ = 0 (i.e., 0.5% < MIDR (θ = 0) < 1.0%). For buildings that are classified to the “S” SDC for θ = 0, the problem can be defined as a two- or three-class PR problem. More specifically, the consideration of a three-class PR problem (Approach 2/Category 3S, or A2/C3S) leads to the prediction of the exact category of buildings’ SDC for θ = θcr, and not only to the prediction of the change (or not) in the SDC for θ = θcr. In other words, in this case the three classes are defined by means of the following criteria: Class 1: {SDC (θ = 0) = “S” → SDC (θ = θcr) = “S”}, Class 2: {SDC (θ = 0) = “S” → SDC (θ = θcr) = “M”}, and Class 3: {SDC (θ = 0) = “S” → SDC (θ = θcr) = “H”}. Class 1 corresponds to insignificant influence of the θcr on the SDC, whereas Classes 2 and 3 correspond to significant influence. Correspondingly, in case of the two-class PR problem (Approach 2/Category 2S, or A2/C2S), the two classes are defined by means of the following criteria: Class 1: {SDC (θ = 0) = “S” → SDC (θ = θcr) = “S”}, and Class 2: {SDC (θ = 0) = “S” → SDC (θ = θcr) = “M” or SDC (θ = θcr)= “H”}. Finally, in the framework of the second approach, a separate procedure is followed for buildings that are classified to the “M” SDC for θ = 0 (Approach 2/Category 2M, or A2/C2M). More specifically, in this case, only two classes can be defined, i.e., Class 1: {SDC (θ = 0) = “M” → SDC (θ= θcr) = “M”} and Class 2: {SDC (θ = 0) = “M” → SDC (θ = θcr) = “H”}.
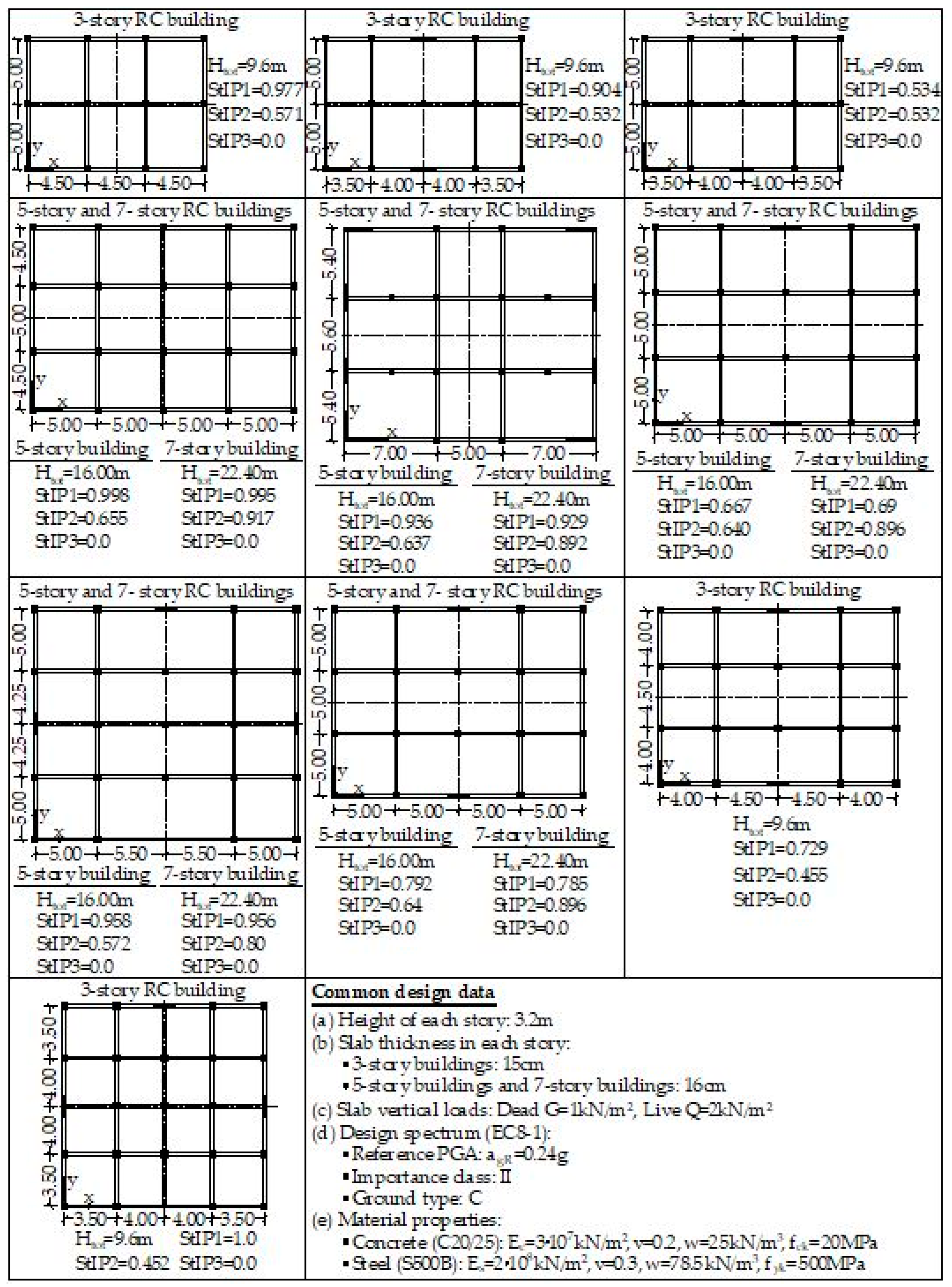
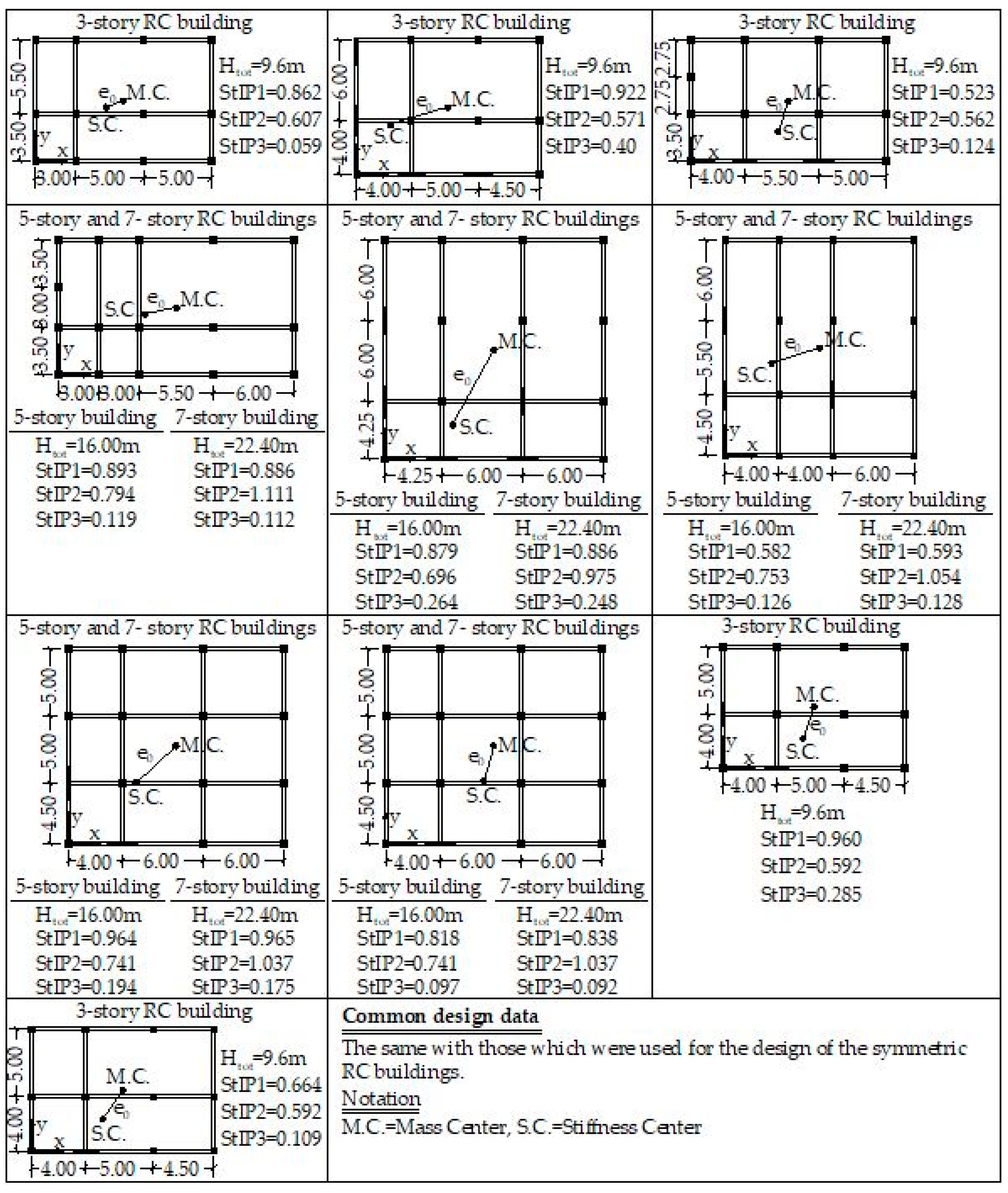
3.3. Selection of Ground Motion, RC Buildings, and the Training Dataset Generation
3.4. Selection of Parameters for the Input Vectors
- SIP is the value of the seismic input parameter that is introduced to the input vector;
- SIP (dir1) is the value of the seismic input parameter that is extracted from the accelerogram that corresponds to horizontal direction 1 of the seismic excitation;
- SIP (dir2) is the value of the seismic input parameter that is extracted from the accelerogram that corresponds to horizontal direction 2 of the seismic excitation.
- (a)
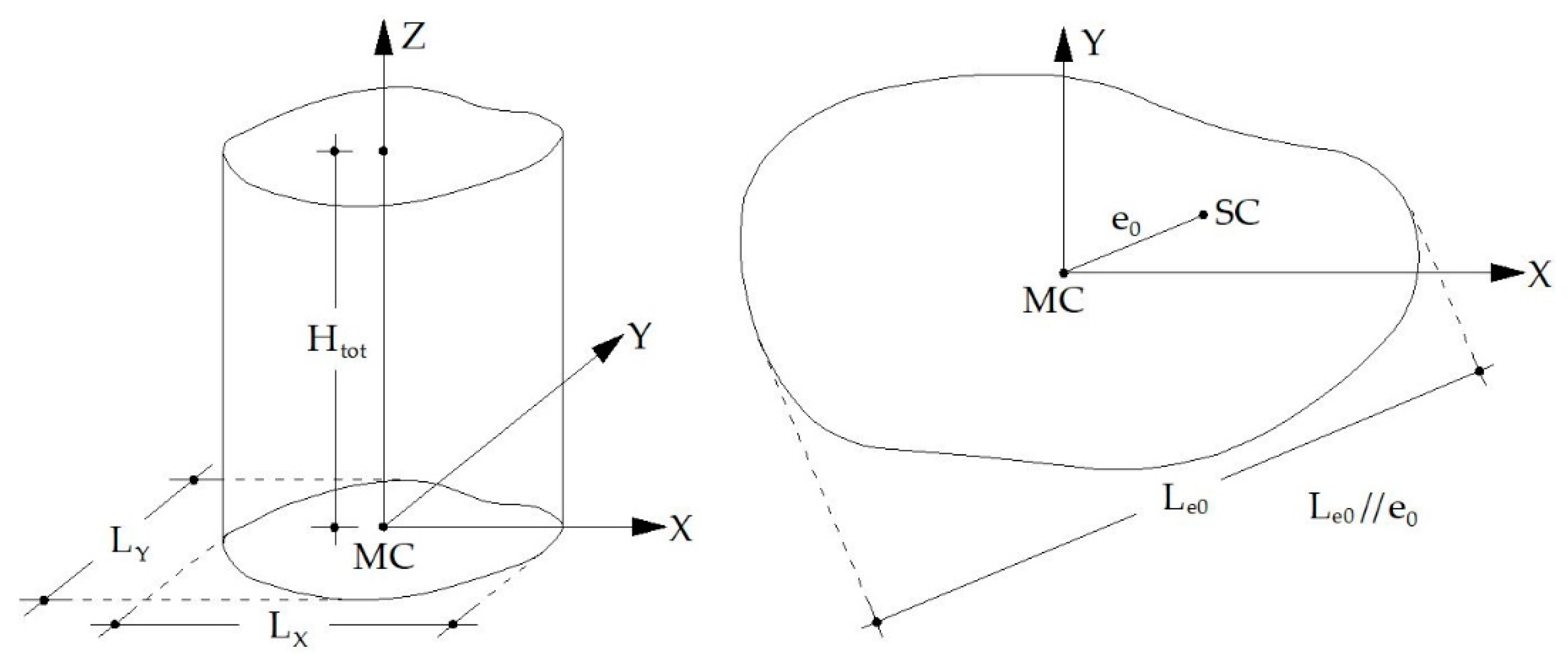
- The ratio of the minimum to the maximum value of uncoupled fundamental natural periods T1,X, T1,Y of buildings for pure vibration along their structural axes X and Y, respectively (see Figure 5).This parameter is an index of the relative horizontal stiffness of buildings along their two orthogonal structural axes. The values of the uncoupled fundamental natural periods are connected to the initial choice of structural axes, which are generally defined in different ways, as stated above. The choice of fundamental natural periods was made in order to define a “metric” by which to measure the ratio of the horizontal stiffness of buildings along two perpendicular axes, which is not influenced by “coupling” effects. It must also be noted that the structural axes can have any orientation, but this fact does not affect the whole procedure, since the uncoupled fundamental natural periods can be defined in any system of two orthogonal axes;
- (b)
- The ratio of the buildings’ total height Htot to the square root of the sum of squares of the horizontal dimensions LX and LY of their plans along the structural axes X and Y, respectively (see Figure 5).This parameter expresses the slenderness of buildings, and plays a significant role in their seismic response, because it gives an additional index of the horizontal stiffness. It must be noted that this parameter can be defined not only in cases of buildings with rectangular plans, but also in any case using equivalent horizontal dimensions along the structural axes X and Y (see Figure 5).
- (c)
- The ratio of the structural eccentricity (i.e., the distance between the mass center (MC) and the stiffness center (SC) of stories) e0 to the dimensions of the plan of the building parallel to it (see Figure 5).This parameter indicates the degree of eccentricity of the forces induced by seismic excitations; it is well documented that this degree significantly affects the level of seismic damage.
3.5. Parametric Investigation for the Optimal Configuration of the Used MLP Networks
4. Presentation and Evaluation of the Results of the Training Procedures
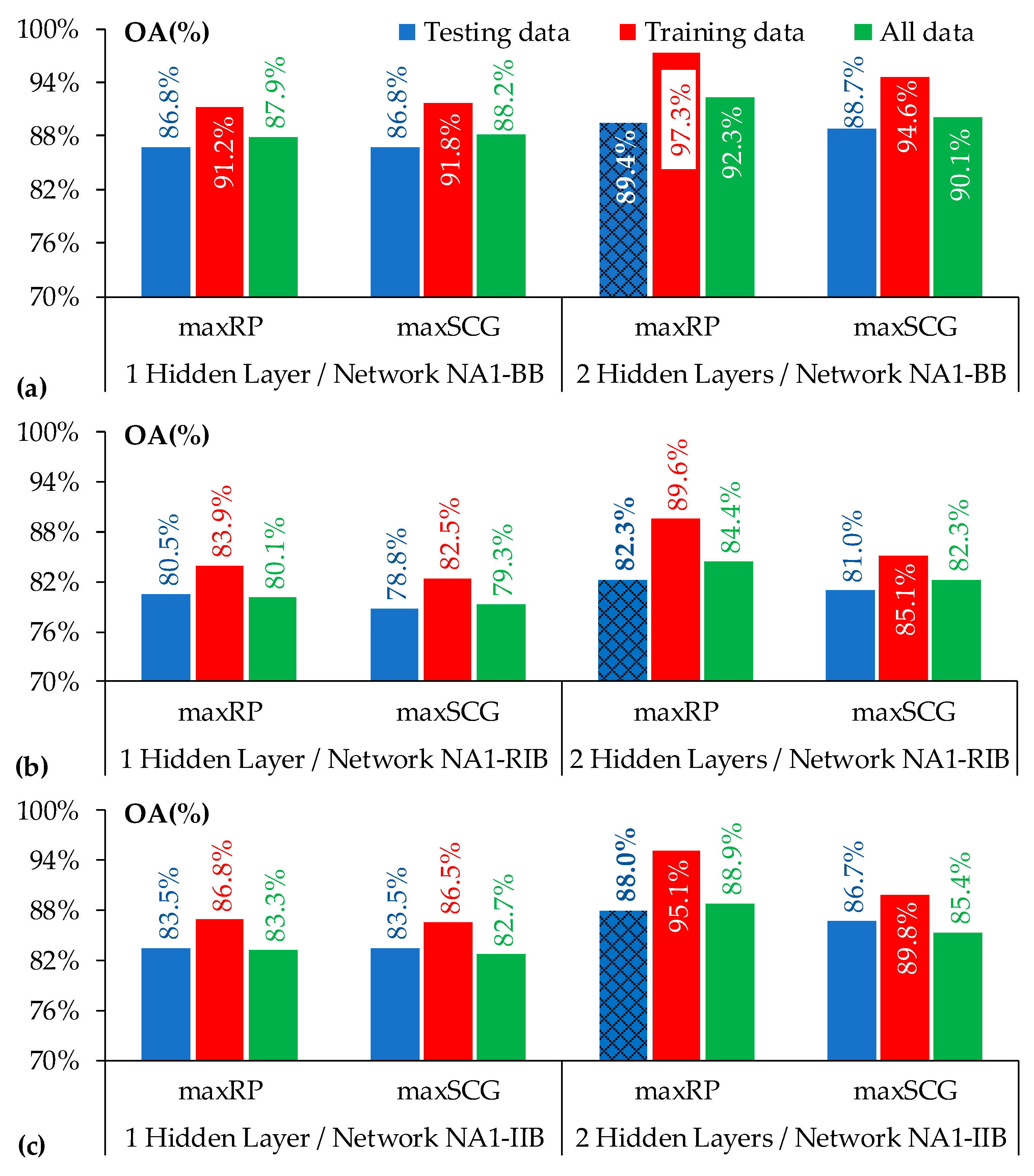
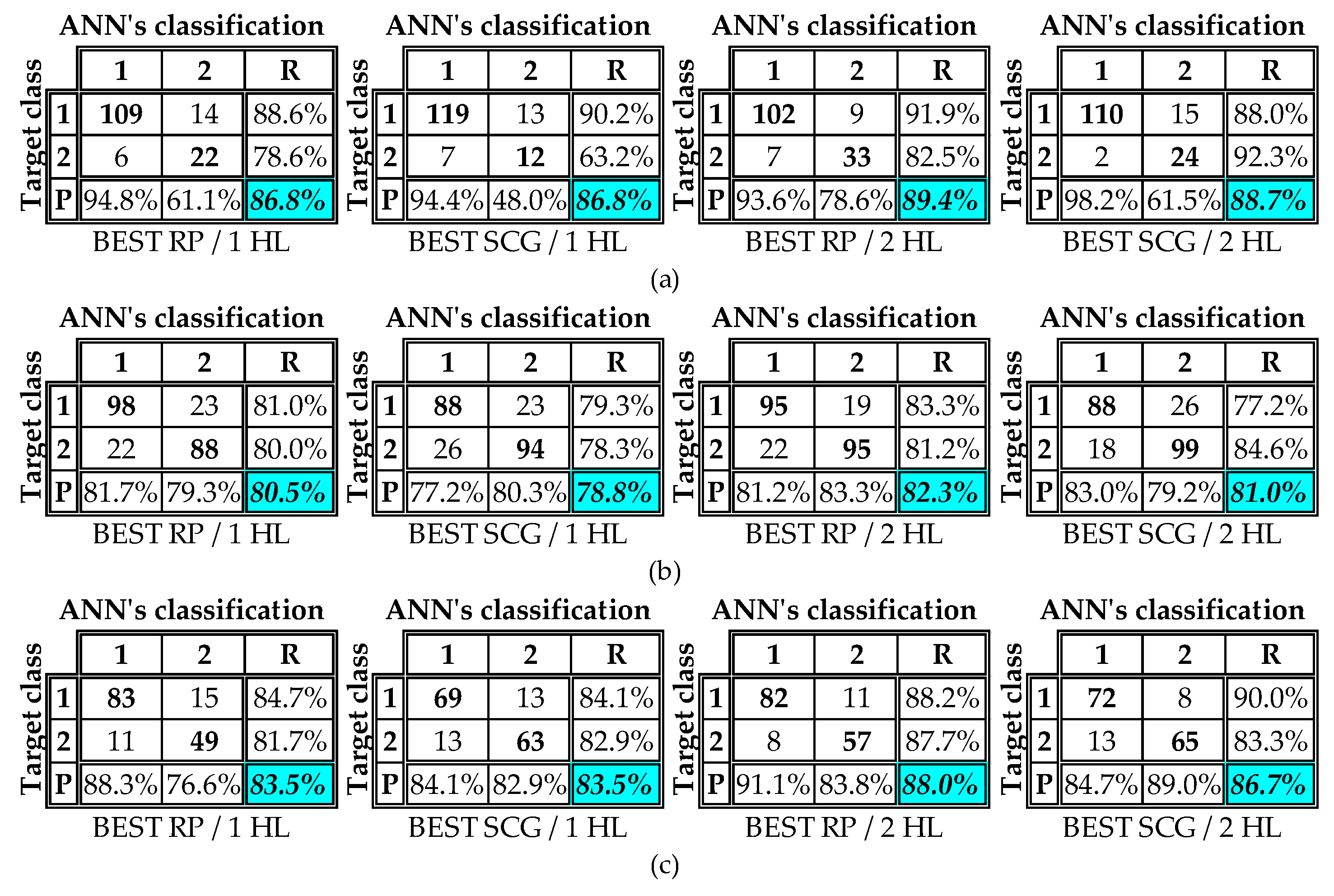
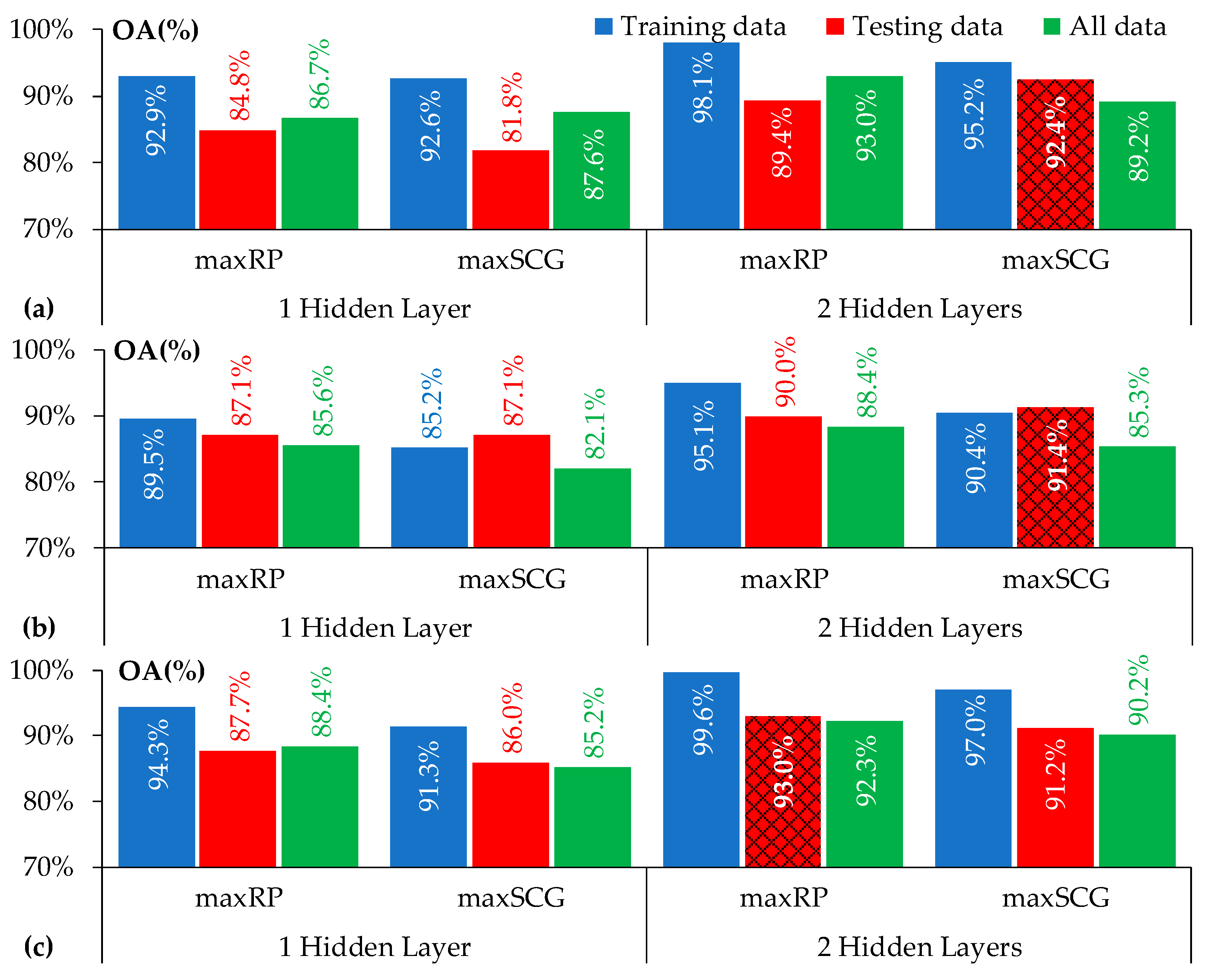
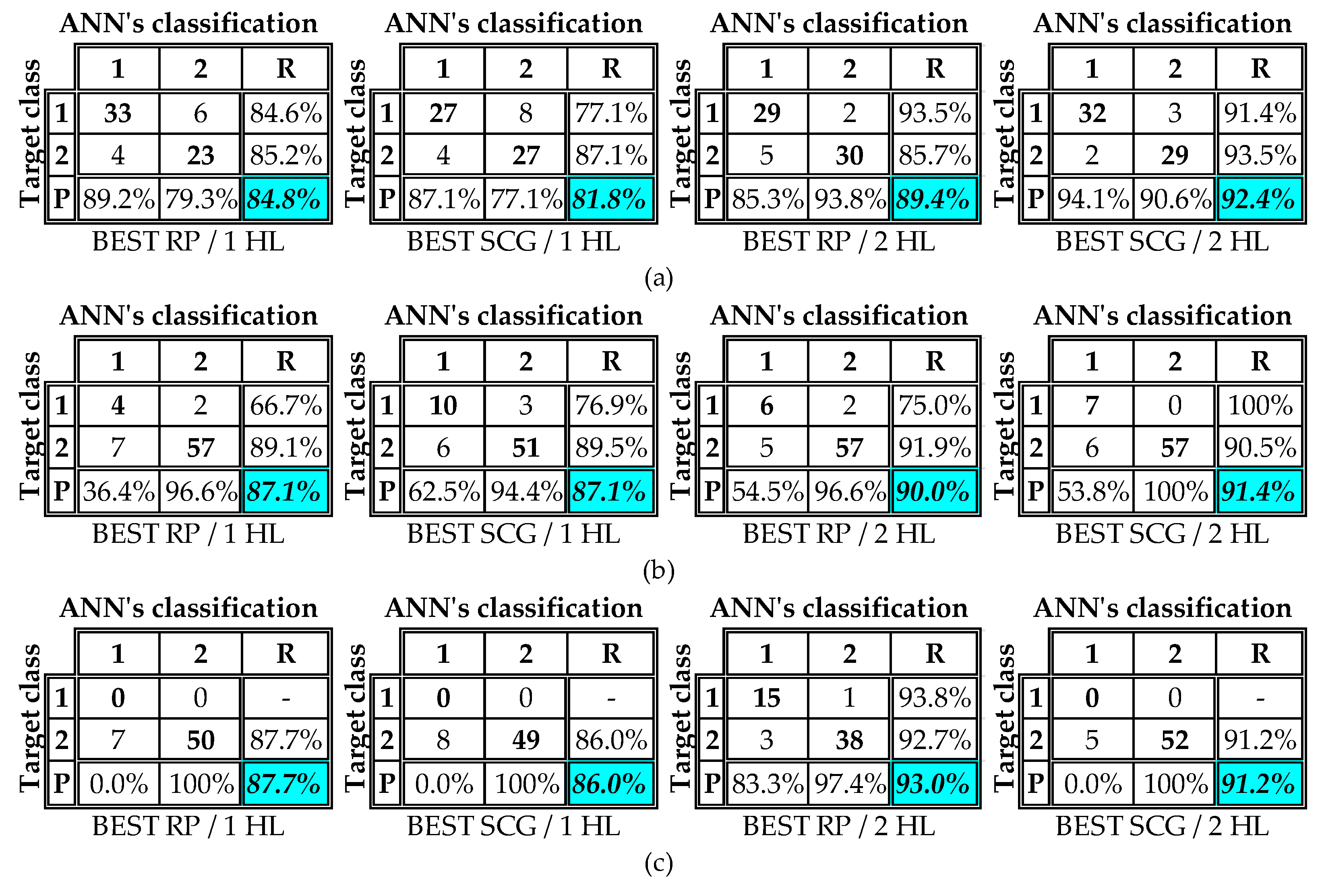
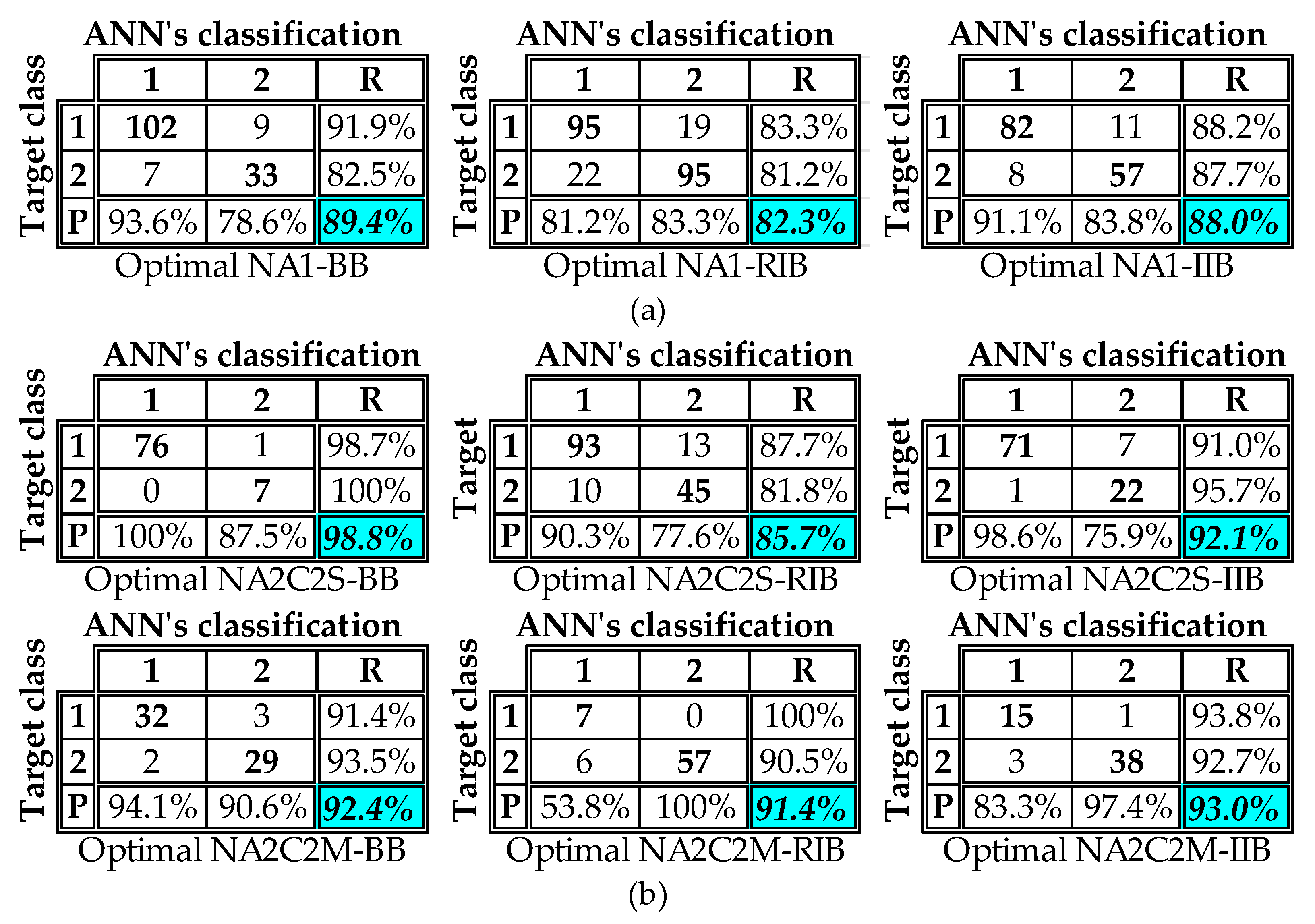
4.1. Optimal Configuration of the MLP Networks Used for the Implementation of A1
- The networks with two hidden layers extract greater OA values than the networks with one hidden layer; however, the differences between them are not significant. More specifically, in the case of training using the RP algorithm, these differences fluctuate between 3.1 and 6.7% for BB, 2.2 and 6.7% for RIB, and 5.3 and 9.5% for IIB. The corresponding fluctuations in the case of training using the SCG algorithm are 2.1–3.1% (BB), 2.7–3.8% (RIB), and 3.2–3.8% (IIB);
- As regards the evaluation of the used training algorithms for the networks with two hidden layers, the RP algorithm is in all cases more effective than the SCG algorithm. However, the extracted OA index values are generally acceptable regardless of the used training algorithm. More specifically, the RP algorithm extracts OA values higher than 82% (in the case of BB and IIB buildings, the values are almost equal to 90%), whereas the corresponding values extracted by the SCG algorithm are slightly lower.
4.2. Optimal Configuration of the MLP Networks Used for the Implementation of A2
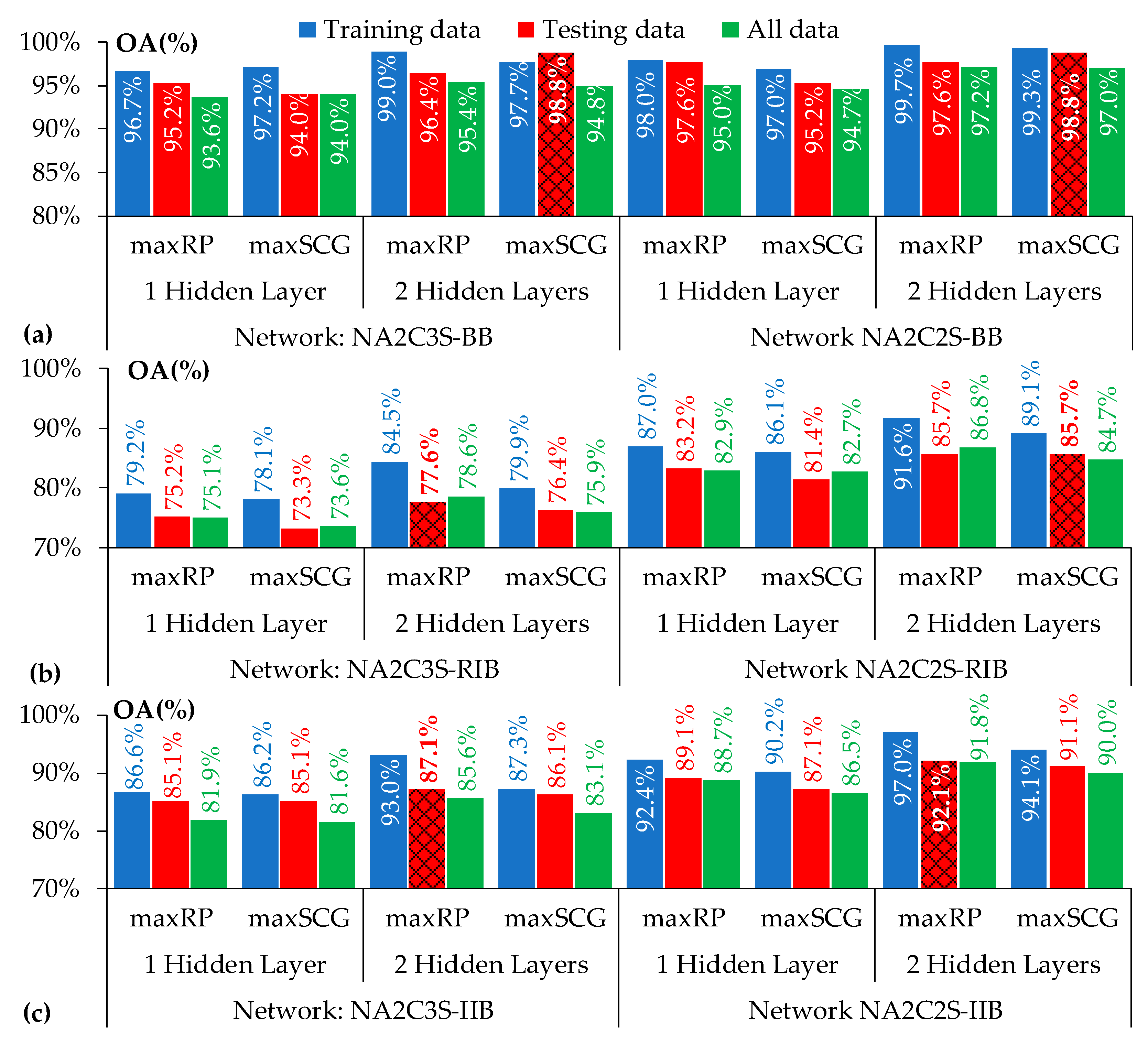
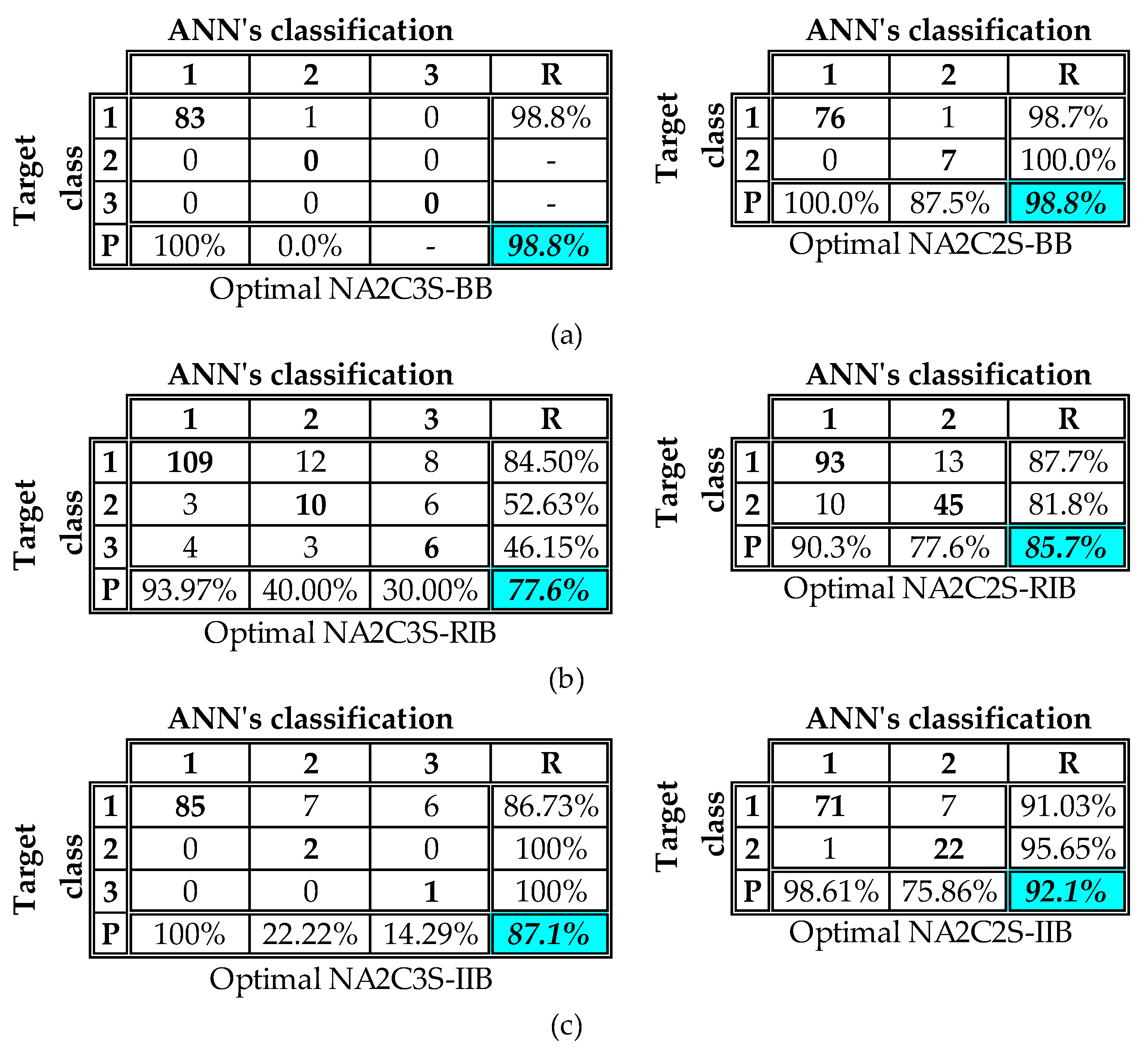
4.2.1. Comparative Evaluation of the Optimally Configured NA2C3S and NA2C2S Networks
- In general, C2S extracts more reliable predictions than C3S. This conclusion is valid for the three versions of the RC buildings. However, the differences between the two categories are not significant, especially in the case of BB (maximum difference = 2.44%). For the other two versions of buildings, the differences are greater, but still not significant (the maximum differences are 11% for RIB and 7.8% for IIB);
- According to the testing subsets, which are generally used in this paper for comparisons, no clear conclusion can be reached as regards the most efficient training algorithm. In the case of C3S, the SCG algorithm is more efficient than the RP only for BB. On the other hand, in the case of C2S, the RP algorithm is more efficient than the SCG only for IIB;
- The addition of the second hidden layer improves the OA index values, but not significantly as regards the comparisons using the testing subsets. For BB, the differences in maximum OA index values between the networks with one and two hidden layers are 4.8% in the case of C3S and 3.6% in the case of C2S; for RIB, the corresponding differences are 3.2% in the case of C3S and 5.1% in the case of C2S, whereas for IIB they are 2.3% in the case of C3S and 3.2% in the case of C2S.
4.2.2. Optimal Configuration of the NA2C2M Networks
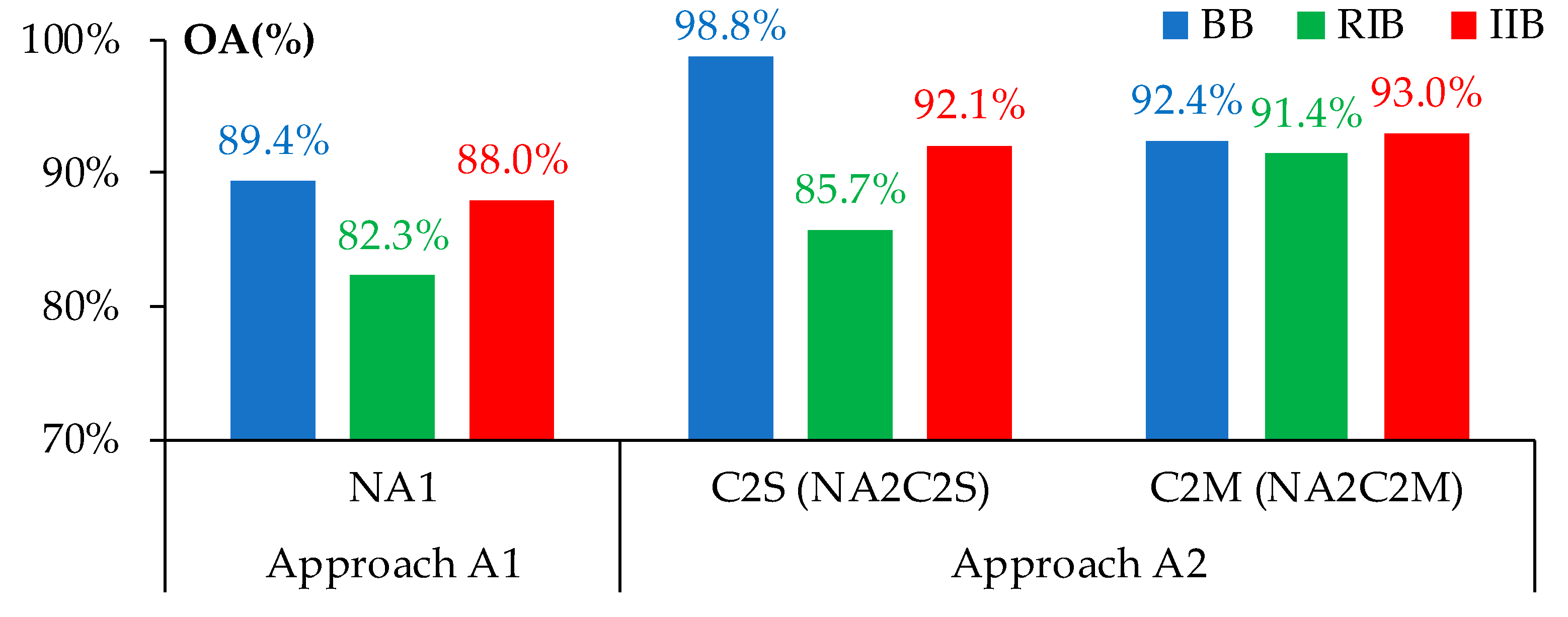
4.3. Comparison of the Efficiency of the Optimally Configured Networks for A1 and A2
5. Conclusions
- Between the two different forms of A2 for the buildings classified to the SDC “S” for θ = 0, “A2/C2S” was proven more efficient than “A2/C3S” for all versions of the studied RC buildings (i.e., BB, RIB, and IIB). This conclusion was based on comparisons of the values of the OA index, as well as on comparisons of the values of the R- and P-indices. The superiority of “A2/C2S” against “A2/C3S” means that the trained networks in the present study are more efficient for correct classifications in PR problems with two categories. This conclusion (which certainly cannot be characterized as being generally valid) must be further examined in future extended research. However, the low efficiency of the trained networks used in the present study to classify the testing samples to correct SDC eliminates the possibility of reliable predictions about the specific SDC of buildings for θ = θcr. Therefore, the reliable predictions concern the information about the change (or lack thereof) in the SDC for θ = θcr. Thus, the category “A2/C2S” in combination with the category “A2/C2M” (which corresponds to buildings that are classified to the SDC “M” for θ = 0)—i.e., the analysis type “A2/(C2S + C2M)”—was used for the comparison of A2 with A1;
- A2, expressed in the form of analysis type “A2/(C2S + C2M)”, was proven to be more efficient than A1. However, the percentages of the correct classifications extracted by A1 cannot be characterized as unacceptable, since the corresponding OA values were in all cases greater than 80%. On the other hand, the OA values extracted by “A2/(C2S + C2M)” were greater than 90%. The real difference between the two approaches can be reduced, since the application of A2 requires the knowledge of the SDC of buildings for θ = 0. This knowledge can be obtained either by implementation of NTHA, or by the simulation of networks properly trained to predict the SDC of buildings for θ = 0. In both cases, the possibility of the insertion of errors can lead to incorrect data for the implementation of “A2/(C2S + C2M)”. On the other hand, A1 can be implemented without the knowledge of the SDC of buildings for θ = 0; thus, A1 is not affected by these additional errors. For this reason, the two approaches can be generally characterized as almost equal;
- As regards the optimal configuration of networks, it was observed that the addition of a second hidden layer improved their classification ability in all studied cases. However, the increases in the OA index values achieved using two hidden layers instead of one are not always significant. On the other hand, the addition of the second hidden layer significantly increases the values of the R- and P-indices in all cases. The optimal number of neurons in the hidden layers cannot be estimated without the implementation of parametric investigation using a predefined rule; this conclusion is consistent with the findings of the available relative literature. The resilient backpropagation (RP) algorithm was proven to be more effective in the training of NA1 networks (A1). On the other hand, no clear conclusion can be extracted for the analysis of A2, because the RP algorithm and the scaled conjugate gradient (SCG) algorithm (which was also used in the present study) were proven to be more effective in almost the same number of cases belonging to this approach. Finally, it was proven that the introduction of the hyperbolic tangent (tansig) function as the activation function of neurons in the output layer of networks leads to optimal classifications in all analyses using t A1, and in the vast majority of analyses using A2.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Generation of Training Dataset: Structural Parameters
- The buildings were considered to be fully fixed to the ground;
- The infill walls were considered only as vertical loads and not as seismic-resistant structural elements;
- The buildings were designed as medium ductility class (MDC) structures [16];
- The behavior factor q was determined according to the recommendations of EN1998-1 [16];
- The buildings were analyzed using the modal response spectrum method;
- For the design of RC members, the load combinations 1.35G + 1.50Q and G + 0.3Q ± E were taken into consideration (G is the dead load, Q is the live load, and E is the seismic load expressed by the simultaneous application of the design spectrum of EN1998-1 [16] for seismic zone II and site class C along the x- and y-axes).
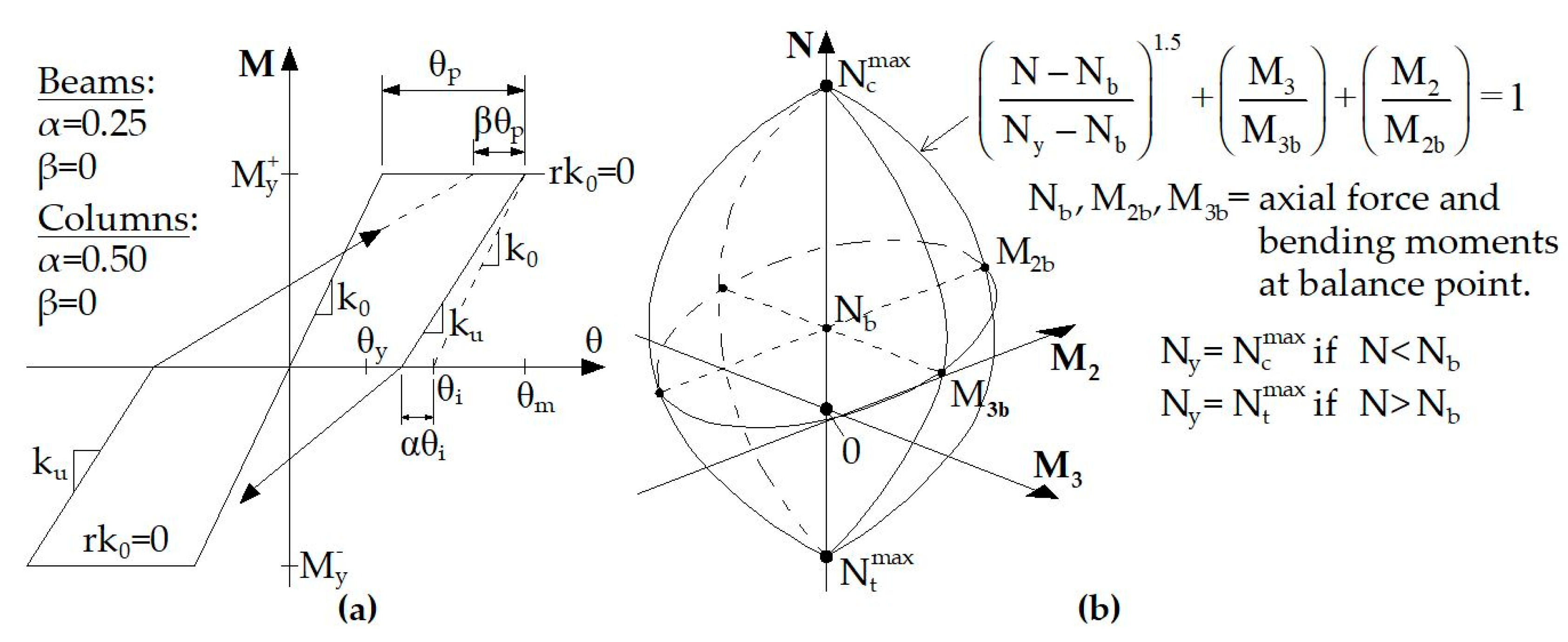
- The nonlinear behavior of the RC members was modeled by means of a lumped plasticity model at the column and beam ends, as well as at the bases of the RC walls;
- As regards the nonlinear modeling of the infill walls in case of RIB and IIB, nonlinear diagonal struts based on the model proposed by Crisafulli [68] were adopted.




Appendix B. Generation of Training Dataset: Seismic Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Earthquake Name | Date | Magnitude (Ms) | Distance to Fault (km) | Component (deg) | PGA (g) |
|---|---|---|---|---|---|---|
| 1 | Imperial Valley | 15 October 1979 | 6.9 | 23.8 | 225/315 | 0.128/0.078 |
| 2 | Imperial Valley | 15 October 1979 | 6.9 | 28.7 | 012/282 | 0.27/0.254 |
| 3 | Kocaeli, (Turkey) | 17 August 1999 | 7.8 | 144.6 | 090/180 | 0.06/0.049 |
| 4 | Landers | 28 June 1992 | 7.4 | 128.3 | 000/270 | 0.057/0.046 |
| 5 | Loma Prieta | 18 October 1989 | 7.1 | 28.2 | 090/180 | 0.247/0.215 |
| 6 | Whittier Narrows | 1 October 1987 | 5.7 | 25.2 | 000/090 | 0.221/0.124 |
| 7 | Northridge | 17 January 1994 | 6.7 | 25.4 | 177/267 | 0.357/0.206 |
| 8 | Northridge | 17 January 1994 | 6.7 | 30 | 020/110 | 0.474/0.439 |
| 9 | N. Palm Springs | 8 July 1986 | 6 | 43.3 | 270/360 | 0.144/0.132 |
| 10 | Northridge | 17 January 1994 | 6.7 | 13 | 000/270 | 0.41/0.482 |
| 11 | Northridge | 17 January 1994 | 6.7 | 6.4 | 090/360 | 0.604/0.843 |
| 12 | Northridge | 17 January 1994 | 6.7 | 12.3 | 000/090 | 0.303/0.443 |
| 13 | Whittier Narrows | 1 October 1987 | 5.7 | 10.8 | 048/318 | 0.426/0.443 |
| 14 | Cape Mendocino | 25 April 1992 | 7.1 | 9.5 | 000/090 | 0.59/0.662 |
| 15 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 2.94 | N/W | 0.251/0.202 |
| 16 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 10.04 | N/W | 0.393/0.742 |
| 17 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 4.01 | N/W | 0.162/0.134 |
| 18 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 7.31 | N/W | 0.821/0.653 |
| 19 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 11.14 | N/W | 0.44/0.353 |
| 20 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 10.33 | N/W | 0.13/0.147 |
| 21 | Chi-Chi (Taiwan) | 20 September 1999 | 7.6 | 5.92 | N/W | 0.188/0.148 |
| 22 | Erzincan (Turkey) | 13 March 1992 | 2.0 | NS/EW | 0.515/0.496 | |
| 23 | Loma Prieta | 18 October 1989 | 7.1 | 12.7 | 000/090 | 0.367/0.322 |
| 24 | Loma Prieta | 18 October 1989 | 7.1 | 14.4 | 000/090 | 0.555/0.367 |
| 25 | Loma Prieta | 18 October 1989 | 7.1 | 14.5 | 000/090 | 0.529/0.443 |
| 26 | Northridge | 17 January 1994 | 6.7 | 7.1 | 090/360 | 0.583/0.59 |
| 27 | Northridge | 17 January 1994 | 6.7 | 8.9 | 270/360 | 0.753/0.939 |
| 28 | Northridge | 17 January 1994 | 6.7 | 14.6 | 000/090 | 0.877/0.64 |
| 29 | Northridge | 17 January 1994 | 6.7 | 6.2 | 052/142 | 0.612/0.897 |
| 30 | Campano Lucano (Italy) | 23 November 1380 | 6.9 | 39 | E-W/N-S | 0.047/0.048 |
| 31 | Spitak (Armenia) | 7 December 1988 | 6.7 | 20 | E-W/N-S | 0.183/0.183 |
| 32 | Izmit (Turkey) | 17 August 1999 | 7.6 | 29 | W-E/S-N | 0.129/0.091 |
| 33 | Duzce (Turkey) | 12 November 1999 | 7.2 | 18 | E-W/N-S | 0.8/0.745 |
| 34 | Duzce (Turkey) | 12 November 1999 | 7.2 | 113 | S-N/E-W | 0.022/0.021 |
| 35 | Duzce (Turkey) | 12 November 1999 | 7.2 | 98 | 030/120 | 0.018/0.016 |
| 36 | Duzce (Turkey) | 12 November 1999 | 7.2 | 94 | E-W/N-S | 0.042/0.041 |
| 37 | Izmit (Turkey) | 17 August 1999 | 7.6 | 80 | E-W/N-S | 0.114/0.11 |
| 38 | Duzce (Turkey) | 6 June 2000 | 6.1 | 158 | LONG/TRAN | 0.004/0.004 |
| 39 | Strofades (Greece) | 18 November 1997 | 6.6 | 54 | 261/351 | 0.053/0.054 |
| 40 | Aigion (Greece) | 15 June 1995 | 6.5 | 138 | 065/155 | 0.013/0.013 |
| 41 | Friuli (Italy) | 11 September 1976 | 5.5 | 7 | E-W/N-S | 0.105/0.23 |
| 42 | Volvi (Greece) | 4 July 1978 | 15 | E-W/N-S | 0.099/0.115 | |
| 43 | Dinar (Turkey) | 1 October 1995 | 6.4 | 0 | W-E/S-N | 0.319/0.273 |
| 44 | Izmit (Turkey) | 17 August 1999 | 7.6 | 5 | E-W/N-S | 0.244/0.296 |
| 45 | Duzce (Turkey) | 12 November 1999 | 7.2 | 0 | W-E/S-N | 0.513/0.377 |
| 46 | Imperial Valley | 15 October 1979 | 6.9 | 43.6 | 262/352 | 0.238/0.351 |
| 47 | Loma Prieta | 18 October 1989 | 7.1 | 16.1 | 000/090 | 0.417/0.212 |
| 48 | Loma Prieta | 18 October 1989 | 7.1 | 77.4 | 180/270 | 0.195/0.244 |
| 49 | Northridge | 17 January 1994 | 6.7 | 30.9 | 155/245 | 0.465/0.322 |
| 50 | Northridge | 17 January 1994 | 6.7 | 36.9 | 090/180 | 0.29/0.264 |
| 51 | Duzce, Turkey | 12 November 1999 | 7.3 | 17.6 | 000/090 | 0.728/0.822. |
| 52 | Northridge | 17 January 1994 | 6.7 | 32.7 | 090/180 | 0.103/0.186 |
| 53 | Imperial Valley | 15 October 1979 | 6.9 | 54.1 | 075/345 | 0.122/0.167 |
| 54 | Superstition Hills | 24 November 1987 | 6.6 | 18.2 | 225/315 | 0.156/0.116 |
| 55 | Duzce (Turkey) | 12 November 1999 | 7.3 | 8.2 | 180/270 | 0.348/0.535 |
| 56 | Imperial Valley | 15 October 1979 | 6.9 | 7.6 | 002/092 | 0.213/0.235 |
| 57 | Imperial Valley | 15 October 1979 | 6.9 | 4.2 | 140/230 | 0.485/0.36 |
| 58 | Imperial Valley | 15 October 1979 | 6.9 | 1 | 140/230 | 0.519/0.379 |
| 59 | Imperial Valley | 15 October 1979 | 6.9 | 1 | 140/230 | 0.41/0.439 |
| 60 | Livermore | 27 January 1980 | 5.5 | 3.6 | 270/360 | 0.258/0.233 |
| 61 | Superstition Hills | 24 November 1987 | 6.6 | 13.9 | 000/090 | 0.358/0.258 |
| 62 | Superstition Hills | 24 November 1987 | 6.6 | 13.3 | 090/180 | 0.172/0.211 |
| 63 | Morgan Hill | 24 April 1984 | 6.1 | 12.8 | 270/360 | 0.224./0.348 |
| 64 | Imperial Valley | 15 October 1979 | 6.9 | 12.6 | 140/230 | 0.364/0.38 |
| 65 | Morgan Hill | 24 April 1984 | 6.1 | 3.4 | 150/240 | 0.156/0.312 |
References
- MacRae, G.A.; Mattheis, J. Three dimensional steel building response to near-fault motions. J. Struct. Eng. ASCE 2000, 126, 117–126. [Google Scholar] [CrossRef]
- Athanatopoulou, A.M. Critical orientation of three correlated seismic components. Eng. Struct. 2005, 27, 301–312. [Google Scholar] [CrossRef]
- Rigato, A.B.; Medina, R.A. Influence of angle of incidence on seismic demands for inelastic single-storey structures subjected to bi-directional ground motions. Eng. Struct. 2007, 29, 2593–2601. [Google Scholar] [CrossRef]
- Kostinakis, K.; Athanatopoulou, A.; Avramidis, I. Orientation effects of horizontal seismic components on longitudinal reinforcement in R/C frame elements. Nat. Hazards Earth Syst. 2012, 12, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Kostinakis, K.G.; Athanatopoulou, A.M.; Tsiggelis, V.S. Effectiveness of percentage combination rules for maximum response calculation within the context of linear time history analysis. Eng. Struct. 2013, 56, 36–45. [Google Scholar] [CrossRef]
- Kostinakis, K.; Morfidis, K.; Xenidis, H. Damage response of multistorey r/c buildings with different structural systems subjected to seismic motion of arbitrary orientation. Earthq. Eng. Struct. Dyn. 2015, 44, 1919–1937. [Google Scholar] [CrossRef]
- Kostinakis, K.; Manoukas, G.; Athanatopoulou, A. Influence of seismic incident angle on response of symmetric in plan buildings. KSCE J. Civ. Eng. 2018, 22, 725–735. [Google Scholar] [CrossRef]
- Fontara, I.-K.; Kostinakis, K.; Manoukas, G.; Athanatopoulou, A. Parameters affecting the seismic response of buildings under bi-directional excitation. Struct. Eng. Mech. 2015, 53, 957–979. [Google Scholar] [CrossRef]
- Pavel, F.; Nica, G. Influence of Rotating Strong Ground Motions on the Response of Doubly Symmetrical RC Wall Structures in Romania and Its Implication on Code Provisions. Int. J. Civ. Eng. 2019, 17, 969–979. [Google Scholar] [CrossRef]
- Cavdar, E.; Ozdemir, G. Using maximum direction of a ground motion in a code-compliant analysis of seismically isolated structures. Structures 2020, 28, 2163–2173. [Google Scholar] [CrossRef]
- Lagaros, N.D. The impact of the earthquake incident angle on the seismic loss estimation. Eng. Struct. 2010, 32, 1577–1589. [Google Scholar] [CrossRef]
- Giannopoulos, D.; Vamvatsikos, D. Ground motion records for seismic performance assessment: To rotate or not to rotate? Earthq. Eng. Struct. Dyn. 2018, 47, 2410–2425. [Google Scholar] [CrossRef]
- Vargas Alzate, Y.F.; Pujades Beneit, L.G.; Barbat, A.H.; Hurtado Gomez, J.E.; Diaz Alvarado, S.A.; Hidalgo Leiva, D.A. Probabilistic seismic damage assessment of reinforced concrete buildings considering directionality effects. Struct. Infrastruct. Eng. 2018, 14, 817–829. [Google Scholar] [CrossRef]
- Skoulidou, D.; Romao, X.; Franchin, P. How is collapse risk of RC buildings affected by the angle of seismic incidence. Earthq. Eng. Struct. Dyn. 2019, 48, 1575–1594. [Google Scholar] [CrossRef]
- Skoulidou, D.; Romão, X. The significance of considering multiple angles of seismic incidence for estimating engineering demand parameters. Bull. Earthq. Eng. 2020, 18, 139–163. [Google Scholar] [CrossRef]
- EN1998-1 (Eurocode 8-1); Design of Structures for Earthquake Resistance—Part 1: General Rules, Seismic Actions and Rules for Buildings. European Committee for Standardization: Brussels, Belgium, 2005.
- Adeli, H. Neural networks in civil engineering: 1989–2001. Comput. Aid Civ. Infrastruct. Eng. 2001, 16, 126–142. [Google Scholar] [CrossRef]
- Shahin, M.A.; Jaksa, M.B.; Maier, H.R. State of the art of artificial neural networks in geotechnical engineering. Electr. J. Geotech. Eng. EJGE 2008, 8, 1–26. [Google Scholar]
- Jegadesh, S.J.S.; Jayalekshmi, S. A review on artificial neural network concepts in structural engineering applications. Int. J. Appl. Civ. Env. Eng. 2015, 1, 6–11. [Google Scholar]
- Sun, H.; Burton, H.V.; Huang, H. Machine learning applications for building structural design and performance assessment: State of the art review. J. Build. Eng. 2021, 33, 101816. [Google Scholar] [CrossRef]
- Harirchian, E.; Hosseini, S.E.A.; Jadhav, K.; Kumari, V.; Rasulzade, S.; Işık, E.; Wasif, M.; Lahmer, T. A review on application of soft computing techniques for the rapid visual safety evaluation and damage classification of existing buildings. J. Build. Eng. 2021, 43, 102536. [Google Scholar] [CrossRef]
- Stephens, J.E.; VanLuchene, R.D. Integrated Assessment of Seismic Damage in Structures. Microcomput. Civ. Eng. 1994, 9, 119–128. [Google Scholar] [CrossRef]
- Molas, G.; Yamazaki, F. Neural networks for quick earthquake damage estimation. Earthq. Eng. Struct. Dyn. 1995, 24, 505–516. [Google Scholar] [CrossRef]
- De Stefano, A.; Sabia, D.; Sabia, L. Probabilistic neural networks for seismic damage mechanisms prediction. Earthq. Eng. Struct. Dyn. 1999, 28, 807–821. [Google Scholar] [CrossRef]
- Sanchez-Silva, M.; Garcia, L. Earthquake damage assessment based on fuzzy logic and neural networks. Earthq. Spectra 2001, 17, 89–112. [Google Scholar] [CrossRef]
- Lagaros, N.; Fragiadakis, M. Fragility Assessment of Steel Frames Using Neural Networks. Earthq. Spectra 2007, 23, 735–752. [Google Scholar] [CrossRef]
- Gonzalez, M.P.; Zapico, J.L. Seismic damage identification in buildings using neural network and modal data. Comput. Struct. 2008, 86, 416–426. [Google Scholar] [CrossRef]
- Lautour, O.R.; Omenzetter, P. Prediction of seismic-induced structural damage using artificial neural networks. Eng. Struct. 2009, 31, 600–606. [Google Scholar] [CrossRef] [Green Version]
- Arslan, M.H. An evaluation of effective design parameters on earthquake performance of RC buildings using neural networks. Eng. Struct. 2010, 32, 1888–1898. [Google Scholar] [CrossRef]
- Vafaei, M.; Adnan, A.B.; Rahman, A.B.A. Real-time seismic damage detection of concrete shear walls using artificial neural networks. J. Earthq. Eng. 2013, 17, 137–154. [Google Scholar] [CrossRef]
- Morfidis, K.; Kostinakis, K. Seismic parameters’ combinations for the optimum prediction of the damage state of R/C buildings using neural networks. Adv. Eng. Softw. 2017, 106, 1–16. [Google Scholar] [CrossRef]
- Morfidis, K.; Kostinakis, K. Approaches to the rapid seismic damage prediction of r/c buildings using artificial neural networks. Eng. Struct. 2018, 165, 120–141. [Google Scholar] [CrossRef]
- Morfidis, K.; Kostinakis, K. Comparative evaluation of MFP and RBF neural networks’ ability for instant estimation of r/c buildings’ seismic damage level. Eng. Struct. 2019, 197, 109436. [Google Scholar] [CrossRef]
- Theodoridis, S.; Koutroumbas, K. Pattern Recognition, 4th ed.; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Naeim, F. The Seismic Design Handbook, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Gunturi, S.K.V.; Shah, H.C. Building specific damage estimation. In Proceedings of the 10th World Conference on Earthquake Engineering, Madrid, Spain, 19–24 July 1992; pp. 6001–6006. [Google Scholar]
- Beyer, K.; Bommer, J. Selection and Scaling of Real Accelerograms for Bi-Directional Loading: A Review of Current Practice and Code Provisions. J. Earthq Eng 2007, 11, 13–45. [Google Scholar] [CrossRef]
- EN1998-2 (Eurocode 8-2); Design of structures for earthquake resistance—Part 2: Bridges. European Committee for Standardization: Brussels, Belgium, 2005.
- FEMA 356; Prestandard and Commentary for the Seismic Rehabilitation of Buildings. Federal Emergency Management Agency: Washington, DC, USA, 2000.
- ASCE 41-06; Seismic Rehabilitation of Existing Buildings. American Society of Civil Engineers: Reston, VA, USA, 2009.
- ASCE 41-13; Seismic Evaluation and Retrofit of Existing Buildings. American Society of Civil Engineers: Reston, VA, USA, 2014.
- NZS 1170.5; Structural Design Actions, Part 5: Earthquake Actions—New Zealand. Code and Supplement, Standards New Zealand: Wellington, New Zealand, 2004.
- Lucchini, A.; Monti, G.; Kunnath, S. Nonlinear Response of Two-Way Asymmetric Single-Story Building under Biaxial Excitation. J. Struct. Eng. ASCE 2011, 137, 34–40. [Google Scholar] [CrossRef]
- Nguyen, V.T.; Kim, D. Influence of incident angles of earthquakes on inelastic responses of asymmetric-plan structures. Struct. Eng. Mech. 2013, 45, 373–389. [Google Scholar] [CrossRef]
- Roy, A.; Santra, A.; Roy, R. Estimating seismic response under bi-directional shaking per uni-directional analysis: Identification of preferred angle of incidence. Soil Dyn. Earthq. Eng. 2018, 106, 163–181. [Google Scholar] [CrossRef]
- Smeby, W.; der Kiureghian, A. Modal combination rules for multicomponent earthquake excitation. Earthq. Eng. Struct. Dyn. 1985, 13, 1–12. [Google Scholar] [CrossRef]
- Menun, C.; Der Kiureghian, A. A replacement for the 30%, 40%, and SRSS rules for multicomponent seismic analysis. Earthq. Spectra 1998, 14, 153–163. [Google Scholar] [CrossRef]
- Lopez, O.A.; Chopra, A.K.; Hernandez, J.J. Critical response of structures to multicomponent earthquake excitation. Earthq. Eng. Struct. Dyn. 2000, 29, 1759–1778. [Google Scholar] [CrossRef]
- López, O.A.; Chopra, A.K.; Hernández, J.J. Evaluation of combination rules for maximum response calculation in multicomponent seismic analysis. Earthq. Eng. Struct. Dyn. 2001, 30, 1379–1398. [Google Scholar] [CrossRef]
- Sessa, S.; Marmo, F.; Rosati, L. Effective use of seismic response envelopes for reinforced concrete structures. Earthq. Eng. Struct. Dyn. 2015, 44, 2401–2423. [Google Scholar] [CrossRef]
- Sessa, S.; Marmo, F.; Vaiana, N.; Rosati, L.A. Computational Strategy for Eurocode 8-Compliant Analyses of Reinforced Concrete Structures by Seismic Envelopes. J. Earthq. Eng. 2021, 25, 1078–1111. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Kappos, A.J. Seismic damage indices for RC buildings: Evaluation of concepts and procedures. Constr. Res. Commun. 1997, 1, 78–87. [Google Scholar] [CrossRef]
- Masi, A.; Vona, M.; Mucciarelli, M. Selection of natural and synthetic accelerograms for seismic vulnerability studies on reinforced concrete frames. J. Struct. Eng. 2011, 137, 367–378. [Google Scholar] [CrossRef]
- Carr, A.J. Ruaumoko—A program for Inelastic Time-History Analysis: Program Manual; Department of Civil Engineering, University of Canterbury: Canterbury, New Zealand, 2006. [Google Scholar]
- EN1992-1-1 (Eurocode 2-1-1); Design of Concrete Structures, Part 1-1: General Rules and Rules for Buildings. European Committee for Standardization: Brussels, Belgium, 2005.
- Caglar, N.; Garip, Z.S. Neural network based model for seismic assessment of existing RC buildings. Comput. Concr. 2013, 12, 229–241. [Google Scholar] [CrossRef]
- Kia, A.; Sensoy, S. Assessment the Effective Ground Motion Parameters on Seismic Performance of R/C Buildings using Artificial Neural Network. Indian J. Sci. Technol. 2014, 7, 2076–2082. [Google Scholar] [CrossRef]
- Kramer, S.L. Geotechnical Earthquake Engineering; Prentice-Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Beyer, K.; Bommer, J. Relationships between median values and between aleatory variabilities for different definitions of the horizontal component of motion. Bull. Seismol. Soc. Am. 2006, 96, 1512–1522. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks and Learning Machines, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2009. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Caruana, R.; Lawrence, S.; Giles, L. Overfitting in neural nets: Backpropagation, conjugate gradient, and early stopping. In Proceedings of the Neural Information Processing Systems, Denver, CO, USA, 1 January 2000; pp. 402–408. [Google Scholar]
- Ying, X. An Overview of Overfitting and its Solutions. J. Phys. Conf. Ser. 2019, 1168, 22022. [Google Scholar] [CrossRef]
- Riedmiller, M.; Braun, H. A Direct Adaptive Method for Faster Backpropagation Learning: The RPROP Algorithm. In Proceedings of the IEEE International Conference on Neural Networks, San Francisco, CA, USA, 28 March–1 April 1993; pp. 586–591. [Google Scholar]
- Moller, M.F. A scaled conjugate gradient algorithm for fast supervised learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]
- Otani, A. Inelastic analysis of RC frame structures. J. Struct. Div. ASCE 1974, 100, 1433–1449. [Google Scholar] [CrossRef]
- Crisafulli, F.J. Seismic Behaviour of Reinforced Concrete Structures with Masonry Infills. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, 1997. [Google Scholar]














| MIDR (%) | <0.25 | 0.25–0.5 | 0.5–1.0 | 1.0–1.5 | >1.5 |
|---|---|---|---|---|---|
| SDC (5 classes) | Null | Slight | Moderate | Heavy | Destruction |
| SDC (3 classes) | Slight (“S”) | Moderate (“M”) | Heavy (“H”) | ||
| Description | No damage or repairable damage in structural system | Significant but repairable damage in structural system | Non-repairable damage in structural system | ||
| Approach/Category | Classes | Criteria of Classes/Significant Influence of θcr |
|---|---|---|
| A1 | 2 | Class 1: SDC (θ = θcr) = SDC (θ = 0)/NO |
| Class 2: SDC (θ = θcr) > SDC (θ = 0)/YES | ||
| A2/C3S | 3 | Class 1: SDC (θ = 0) = “S” → SDC (θ = θcr) = “S”/NO |
| Class 2: SDC (θ = 0) = “S” → SDC (θ = θcr) = “M”/YES | ||
| Class 3: SDC (θ = 0) = “S” → SDC (θ = θcr) = “H”/YES | ||
| A2/C2S | 2 | Class 1: SDC (θ = 0) = “S” → SDC (θ = θcr) = “S”/NO |
| Class 2: SDC (θ = 0) = “S” → SDC (θ = θcr) = “M” or “H”/YES | ||
| A2/C2M | 2 | Class 1: SDC (θ = 0) = “M” → SDC (θ = θcr) = “M”/NO |
| Class 2: SDC (θ = 0) = “M” → SDC (θ = θcr)= “H”/YES |
| Analysis Type | Names of Networks | Number of Classes |
|---|---|---|
| “A1” | NA1 (all buildings) | 2 |
| “A2/(C3S + C2M)” | NA2C3S (buildings classified to SDC “S” for θ = 0) NA2C2M (buildings classified to SDC “M” for θ = 0) | 3 if SDC (θ = 0) = “S” 2 if SDC (θ = 0) = “M” |
| “A2/(C2S + C2M)” | NA2C2S (buildings classified to SDC “S” for θ = 0) NA2C2M (buildings classified to SDC “M” for θ = 0) | 2 if SDC (θ = 0) = “S” 2 if SDC (θ = 0) = “M” |
| Network | Number of Samples | Form of Target Vectors (TV) |
|---|---|---|
| NA1 | BB: 1006 (=1950–944 *), RIB: 1539 (=1950–411 *), IIB: 1052 (=1950–898 *) | TV = [1 0] T (Class 1) |
| TV = [0 1] T (Class 2) | ||
| NA2C3S | BB: 563 (=1950–443–944 *), RIB: 1075 (=1950–464–411 *), IIB: 673 (=1950–379–898 *) | TV = [1 0 0] T (Class 1) |
| TV = [0 1 0] T (Class 2) | ||
| TV = [0 0 1] T (Class 3) | ||
| NA2C2S | BB: 563, RIB: 1075, IIB: 673 | TV = [1 0] T (Class 1) |
| TV = [0 1] T (Class 2) | ||
| NA2C2M | BB: 443 (=1950–563–944 *), RIB: 464 (=1950–1075–411 *), IIB: 379 (=1950–673–898 *) | TV = [1 0] T (Class 1) |
| TV = [0 1] T (Class 2) |
| 1 | Peak ground acceleration (PGA) | 7 | Acceleration spectrum intensity (ASI) |
| 2 | Peak ground velocity (PGV) | 8 | Cumulative absolute velocity (CAV) |
| 3 | Specific energy density (SED) | 9 | Peak ground displacement (PGD) |
| 4 | Arias intensity (Ia) | 10 | Effective peak acceleration (EPA) |
| 5 | Predominant period (PP) | 11 | Sustained maximum acceleration (SMA) |
| 6 | Housner intensity (HI) | 12 | Sustained maximum velocity (SMV) |
| Version of Buildings | BB | RIB | IIB | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Training Algorithm | RP | SCG | RP | SCG | RP | SCG | |||||||
| Number of HL | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | |
| Training data-set | Activation functions | T/T | T/T/T | T/T | T/L/T | T/T | T/T/T | L/T | T/T/T | T/T | T/T/T | T/T | T/T/T |
| Neurons/HL | 60 | 60/50 | 52 | 48/52 | 46 | 52/52 | 30 | 52/48 | 56 | 50/46 | 46 | 58/46 | |
| Testing dataset | Activation functions | T/T | L/L/T | L/T | T/T/T | T/T | L/L/T | L/T | T/L/T | L/T | T/T/T | T/T | L/T/L |
| Neurons/HL | 30 | 36/34 | 14 | 28/50 | 30 | 28/14 | 52 | 58/52 | 24 | 20/10 | 14 | 10/12 | |
| Total dataset | Activation functions | L/T | T/T/T | T/T | T/L/T | T/T | T/T/T | T/T | T/T/T | T/T | T/T/T | T/T | T/T/T |
| Neurons/HL | 30 | 60/50 | 58 | 48/52 | 40 | 52/52 | 60 | 50/26 | 60 | 50/60 | 40 | 26/28 | |
| Version of Buildings | BB | RIB | IIB |
|---|---|---|---|
| Training algorithm | RP | RP | RP |
| Number of HLs | 2 | 2 | 2 |
| Activation functions | L/L/T | L/L/T | T/T/T |
| Neurons/HL | 36/34 | 28/14 | 20/10 |
| Name of network | NA1-BB | NA1-RIB | NA1-IIB |
| Category | A2/C3S | A2/C2S | A2/C2M | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Version of Buildings | BB | RIB | IIB | BB | RIB | IIB | BB | RIB | IIB |
| Training algorithm | SCG | RP | RP | SCG | SCG | RP | SCG | SCG | RP |
| Number of HLs | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Activation functions | T/L/L | L/L/T | L/L/T | T/T/T | T/L/T | L/T/T | L/T/T | T/T/T | T/T/T |
| Neurons/HL | 30/50 | 16/52 | 44/26 | 36/46 | 50/36 | 46/16 | 56/38 | 48/22 | 20/24 |
| Name of network | NA2C3S-BB | NA2C3S-RIB | NA2C3S-IIB | NA2C2S-BB | NA2C2S-RIB | NA2C2S-IIB | NA2C2M-BB | NA2C2M-RIB | NA2C2M-IIB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morfidis, K.; Kostinakis, K. Rapid Prediction of Seismic Incident Angle’s Influence on the Damage Level of RC Buildings Using Artificial Neural Networks. Appl. Sci. 2022, 12, 1055. https://doi.org/10.3390/app12031055
Morfidis K, Kostinakis K. Rapid Prediction of Seismic Incident Angle’s Influence on the Damage Level of RC Buildings Using Artificial Neural Networks. Applied Sciences. 2022; 12(3):1055. https://doi.org/10.3390/app12031055
Chicago/Turabian StyleMorfidis, Konstantinos, and Konstantinos Kostinakis. 2022. "Rapid Prediction of Seismic Incident Angle’s Influence on the Damage Level of RC Buildings Using Artificial Neural Networks" Applied Sciences 12, no. 3: 1055. https://doi.org/10.3390/app12031055
APA StyleMorfidis, K., & Kostinakis, K. (2022). Rapid Prediction of Seismic Incident Angle’s Influence on the Damage Level of RC Buildings Using Artificial Neural Networks. Applied Sciences, 12(3), 1055. https://doi.org/10.3390/app12031055