
Designation of the Quality of EGNOS+SDCM Satellite Positioning in the Approach to Landing Procedure

 ,
, 
 , , and
, , and
Abstract
:1. Introduction
- -
- The SBAS system should be compatible with a specific GNSS system, e.g., with the GPS (Global Positioning System);
- -
- The SBAS system should provide an additional code phase navigation signal at the carrier frequency L1 of 1575.42 MHz;
- -
- The SBAS system should monitor the current status of the constellation of the given GNSS system with which it is compatible and interoperable;
- -
- The SBAS system should transmit two main differential corrections, i.e., the correction of ephemeris data and GNSS satellite clock correction;
- -
- Finally, apart from that, it is required that every SBAS system should determine the ionospheric correction precisely and calculate the tropospheric correction in compliance with the RTCA-MOPS (Radio Technical Commission for Aeronautics—Minimum Operational Performance Standards) model. Due to that, the following technical parameters were adopted in Annex 10 for the SBAS navigation solution [2]:
- -
- The pseudo-range error from SBAS satellite cannot exceed 25 m;
- -
- The probability that the range error exceeds 150 m in any hour shall not exceed 10–5;
- -
- The probability of unscheduled outages of the ranging function from an SBAS satellite in any hour shall not exceed 10–3;
- -
- The SBAS service area shall be a defined area within an SBAS coverage area where SBAS meets the relevant requirements;
- -
- The carrier frequency is 1575.42 MHz within a ±12 MHz band;
- -
- The signal of SBAS satellites should be within the range of –161 dBW to –153 dBW;
- -
- The difference between SNT (SBAS Network Time) and GPST (GPS time) shall not exceed 50 nanoseconds.
- -
- The accuracy parameter for navigation in the horizontal plane should not exceed 16 m for the SBAS APV-I and SBAS APV-II procedures;
- -
- The accuracy parameter for vertical navigation should not exceed 20 m for the SBAS APV-I procedure and 8 m for the SBAS APV-II procedure;
- -
- The maximum time-to-alert should not exceed 10 a for the SBAS APV-I procedure and 6 s for the SBAS APV-II procedure;
- -
- The positioning continuity must not be lower than 1 ÷ 8 × 10−6/3600 s for a minimum of 15 s for the approach procedures SBAS APV-I and SBAS APV-II;
- -
- The availability of positioning should fall into the range from 0.99 to 1 for the approach procedures SBAS APV-I and SBAS APV-II;
- -
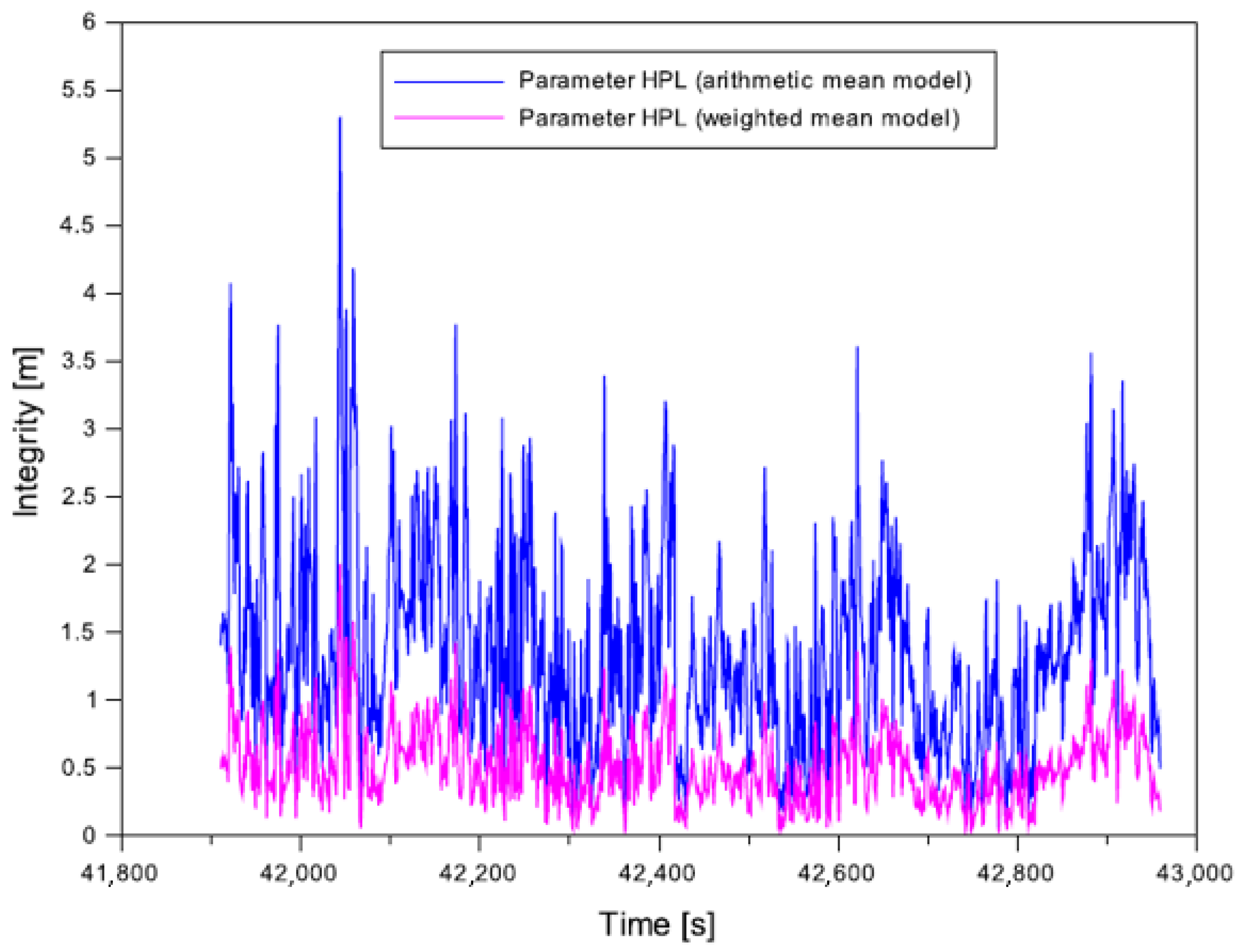
- The integrity parameter HPL (Horizontal Protection Level) for navigation in the horizontal plane should not exceed 40 m for the SBAS APV-I and SBAS APV-II procedures;
- -
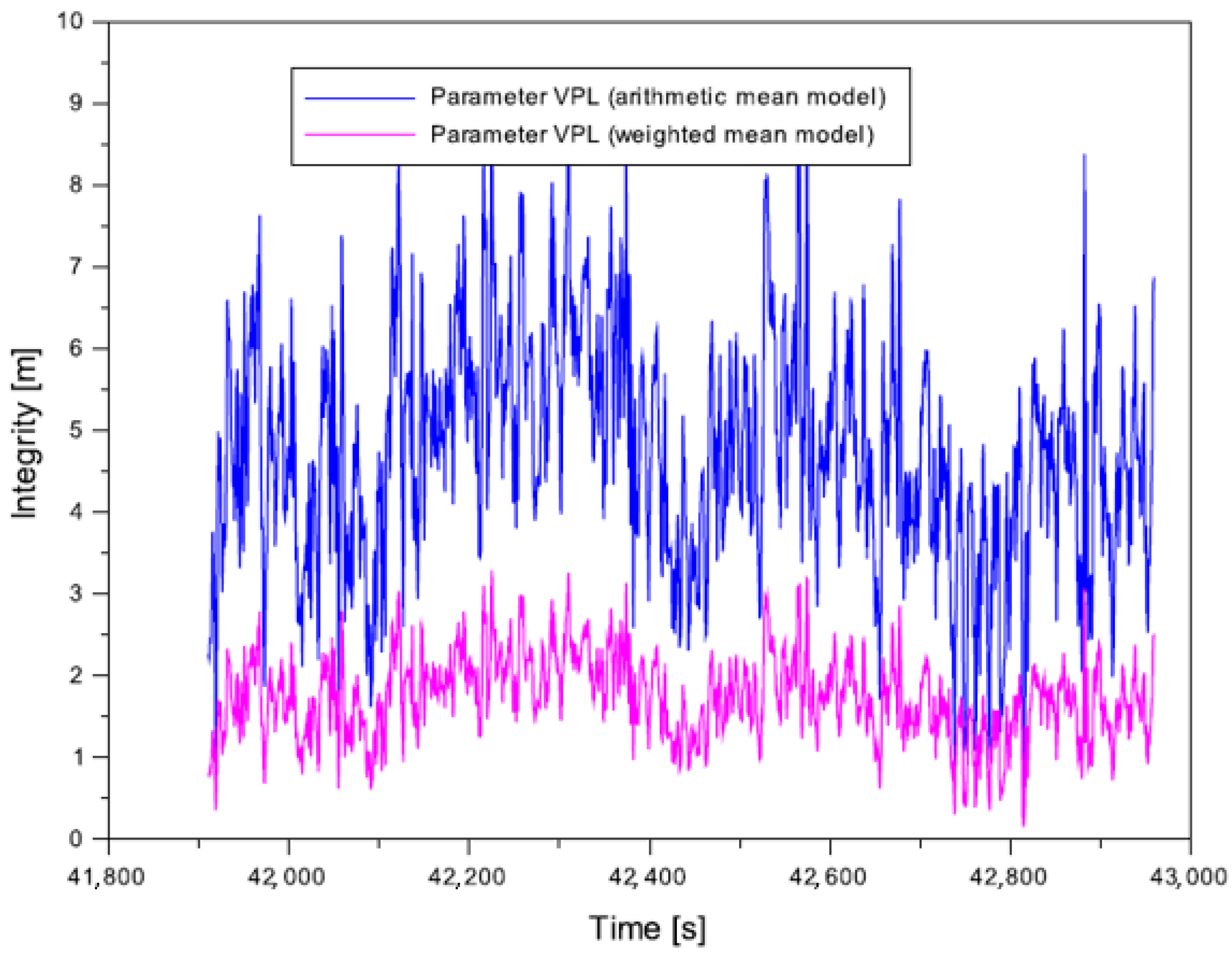
- The integrity parameter VPL (Vertical Protection Level) for vertical navigation should not exceed 50 m for the SBAS APV-I approach procedure and 20 m for the SBAS APV-II procedure.
- -
- The quality parameters of SBAS positioning are very important in terms of the application of SBAS systems in aviation;
- -
- The studies of quality parameters of SBAS positioning were usually based on a single SBAS navigation solution;
- -
- -
- -
- -
- -
- The area of the territory of Poland is covered by the common range of corrections of EGNOS and SDCM, so that both SBAS supporting systems are used in GNSS satellite positioning.
- -
- There is no common solution for EGNOS and SDCM positioning in the context of aviation;
- -
- In numerical terms, no algorithms exist that would integrate the single EGNOS and SDCM solutions for the purposes of determination of the resultant position of the aerial vehicle;
- -
- In terms of aviation, there are also no available mathematical formulas that would enable the determination of the accuracy, continuity, availability, and integrity from a combined navigation solution of EGNOS and SDCM;
- -
- In aviation, more research is required to determine the SBAS positioning quality for specific phases of flight, e.g., landing approach;
- -
- Another missing element in the aviation context is the increased number of trainings of flight crews in Multi-SBAS positioning for aviation purposes.
- -
- Defining a multi-system Multi-SBAS solution that takes into account individual EGNOS and SDCM solutions to determine the model of the resultant position of an aerial vehicle;
- -
- Employing the Multi-SBAS solution to calculate the quality parameters of the aerial vehicle, i.e., the accuracy, continuity, integrity, and availability parameters;
- -
- Developing a weighting plan to integrate and combine individual SBAS solutions to the Multi-SBAS model;
- -
- Conducting navigation analyses that confirm the correctness of the developed research methodology.
2. Research Method
2.1. Mathematical Model of Multi-SBAS Solution for Aircraft Position using EGNOS and SDCM Data
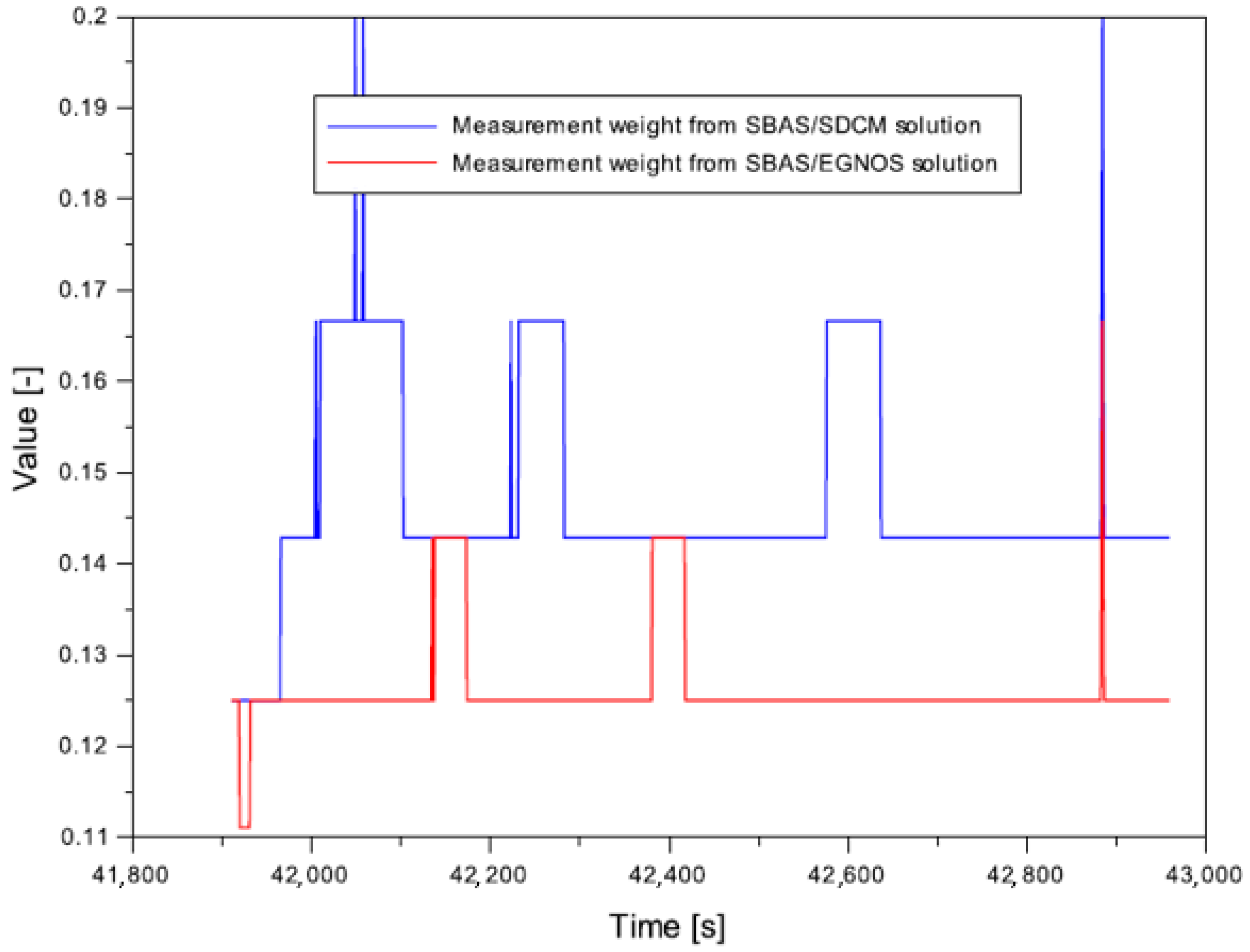
- —measurement weight from the SBAS/EGNOS solution,
- —measurement weight from the SBAS/SDCM solution.
- is the number of GPS satellites for which EGNOS corrections were defined in the SBAS/EGNOS solution,
- is the number of GPS satellites for which EGNOS corrections were defined in the SBAS/SDCM solution.
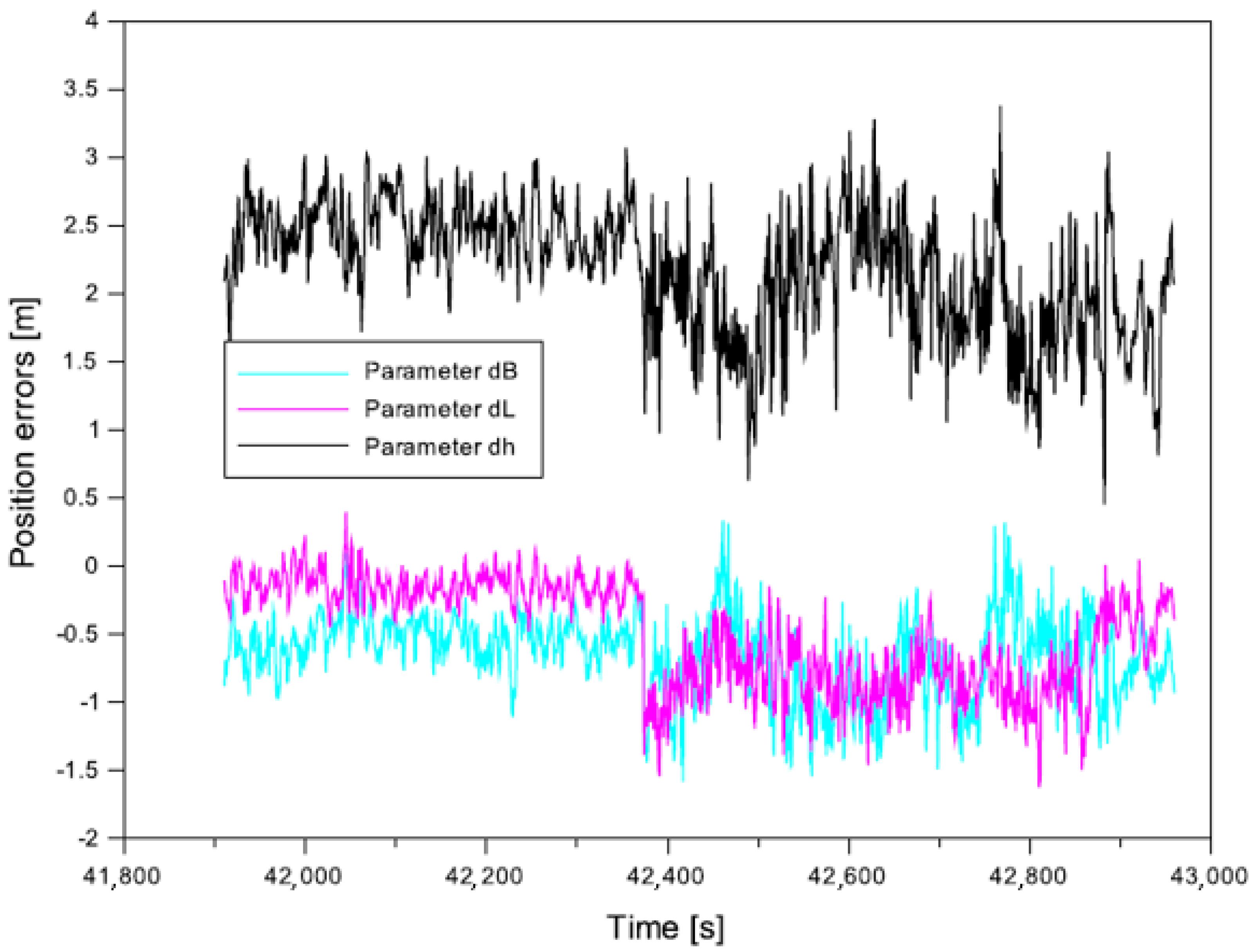
- —corrections along the B axis,
- ,
- ,
- —corrections along the L axis,
- ,
- ,
- —corrections along the h axis,
- ,
- ,
- —number of measurements, ,
- —number of degrees of freedom.
2.2. Mathematical Model of Multi-SBAS Solution for Parameters of Quality Positioning
- -
- for the accuracy parameter:
- —accuracy of positioning the aerial vehicle [63],
- —the resultant coordinates of the aerial vehicle determined with use of solution (1),
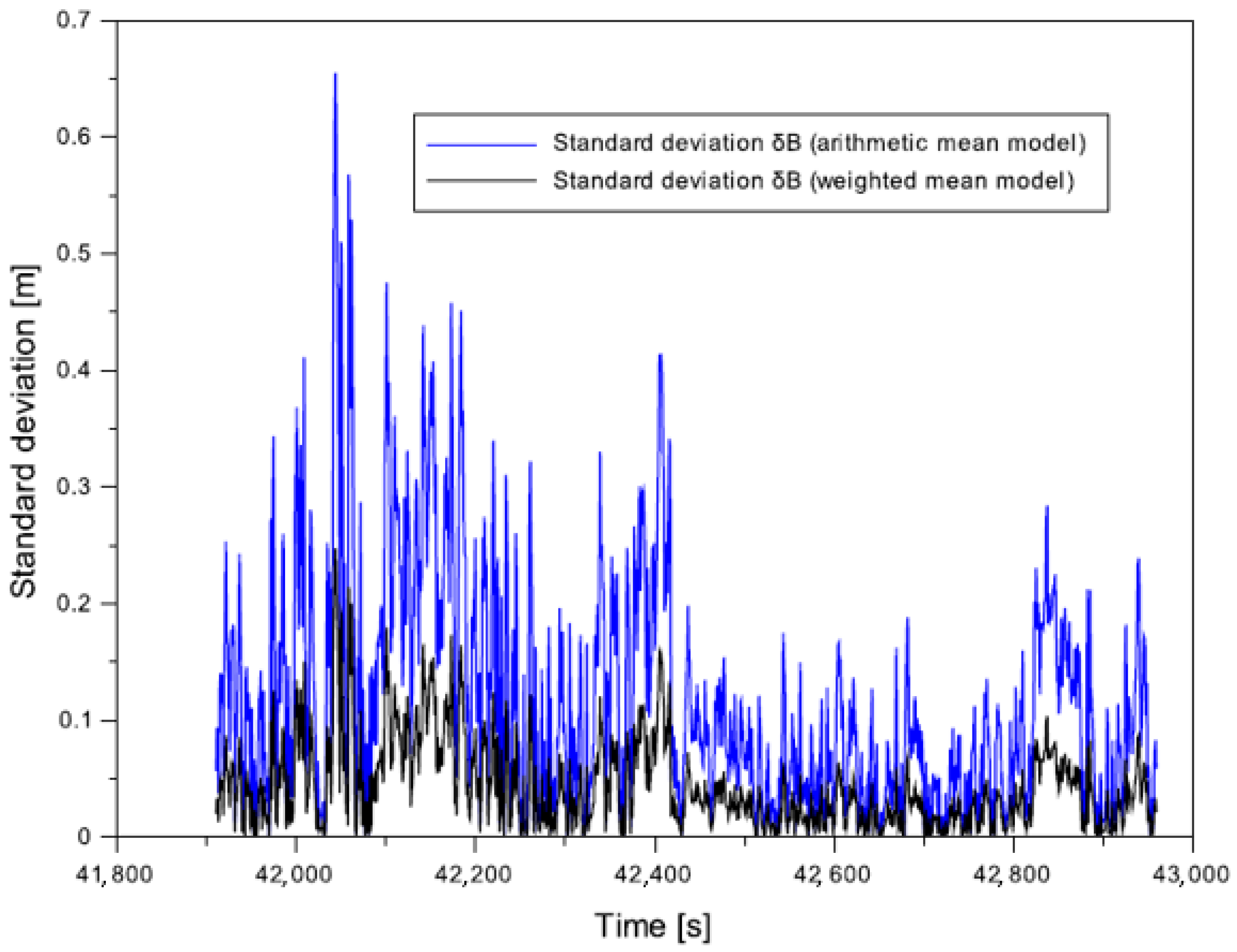
- —RMS error for the calculated accuracy of the determined resultant component B of the aerial vehicle,
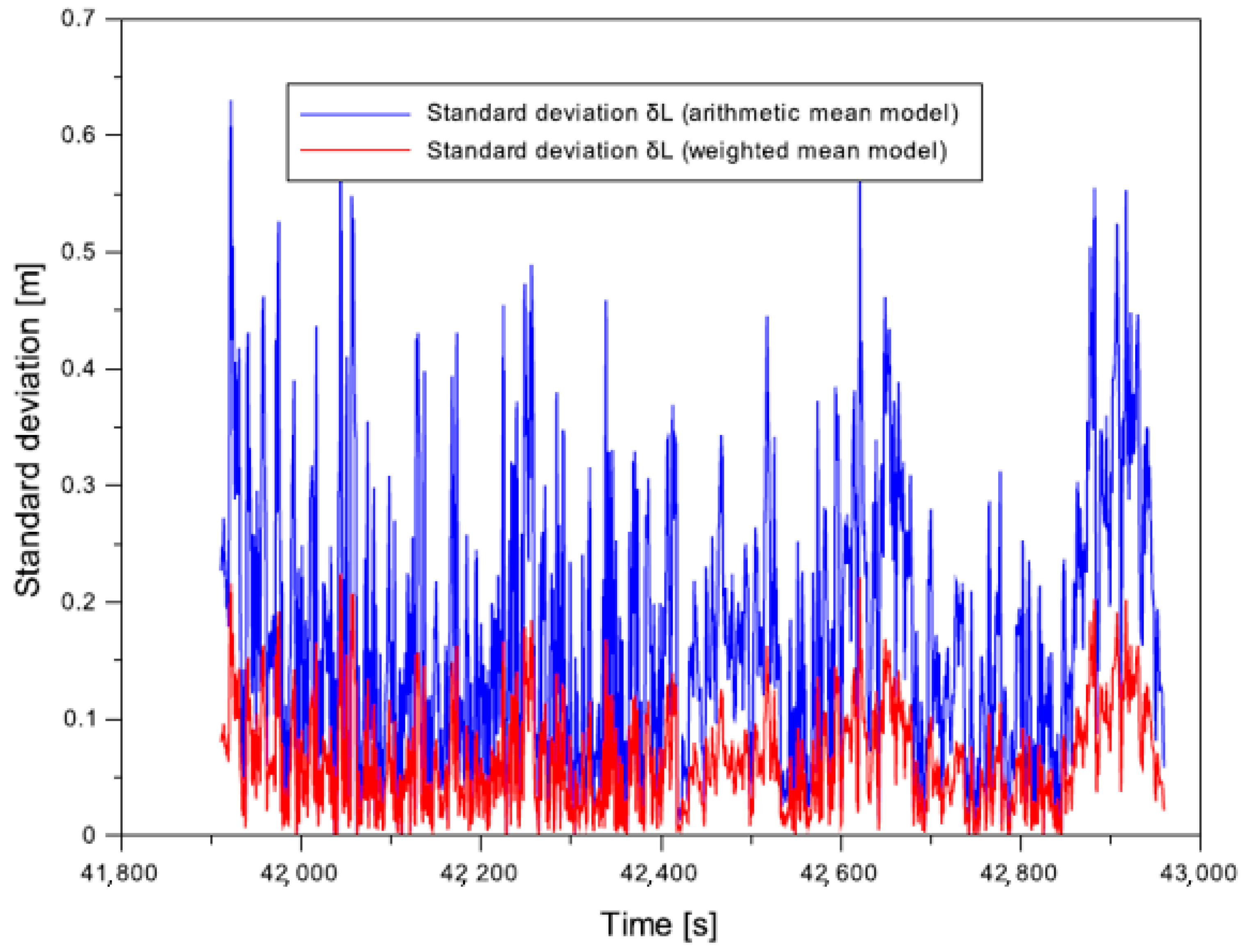
- —RMS error for the calculated accuracy of the determined resultant component L of the aerial vehicle,
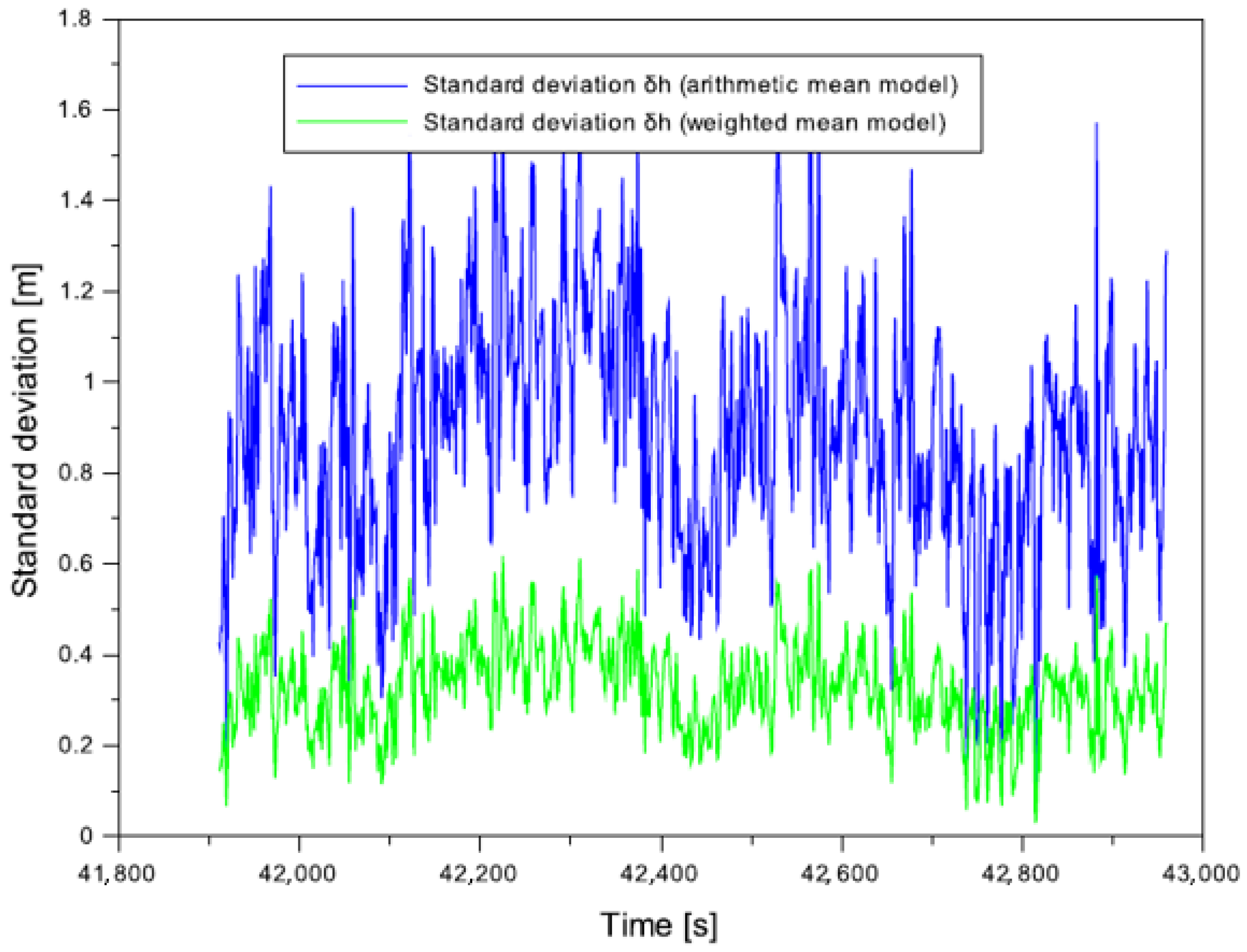
- —RMS error for the calculated accuracy of the determined resultant component h of the aerial vehicle,
- —number of measurement epochs.
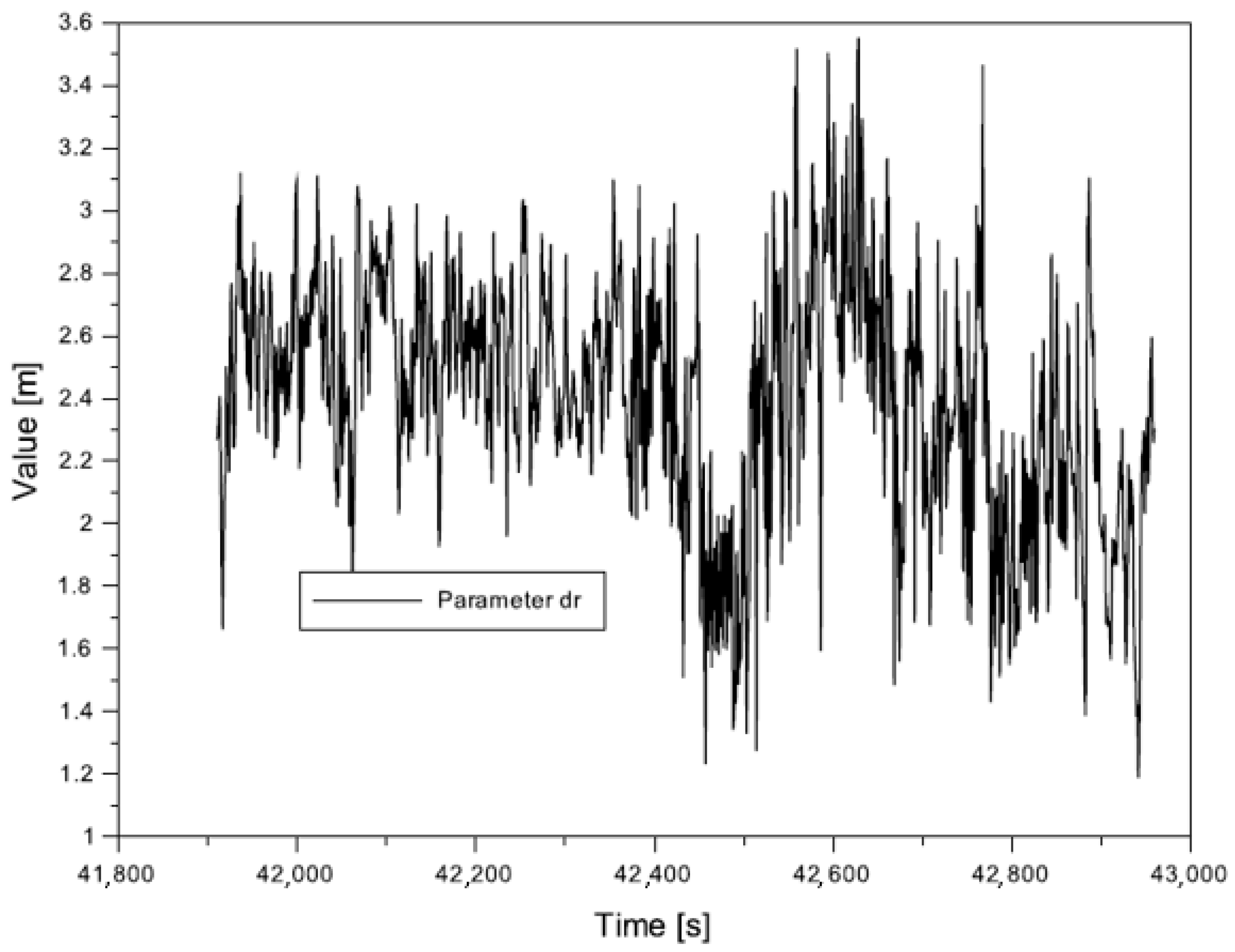
- —resultant position error in 3D space.
- -
- for the availability parameter:
- —resultant availability of Multi-SBAS positioning,
- —positioning availability from the SBAS/EGNOS solution,
- ,
- —positioning availability from the SBAS/SDCM solution,
- ,
- —outage duration in the SBAS/EGNOS solution,
- —outage duration in the SBAS/SDCM solution,
- —total time of functioning of the given SBAS system.
- -
- for the continuity parameter:
- —resultant continuity of Multi-SBAS positioning,
- —positioning continuity in SBAS/EGNOS solution,
- ,
- —positioning continuity in SBAS/SDCM solution,
- ,
- —probability of maintaining continuity in SBAS/EGNOS solution,
- —probability of maintaining continuity in SBAS/SDCM solution,
- —time interval unit in SBAS/EGNOS solution,
- —time interval unit in SBAS/SDCM solution,
- —total time of observations in SBAS/EGNOS solution,
- —total time of observations in SBAS/SDCM solutions.
- -
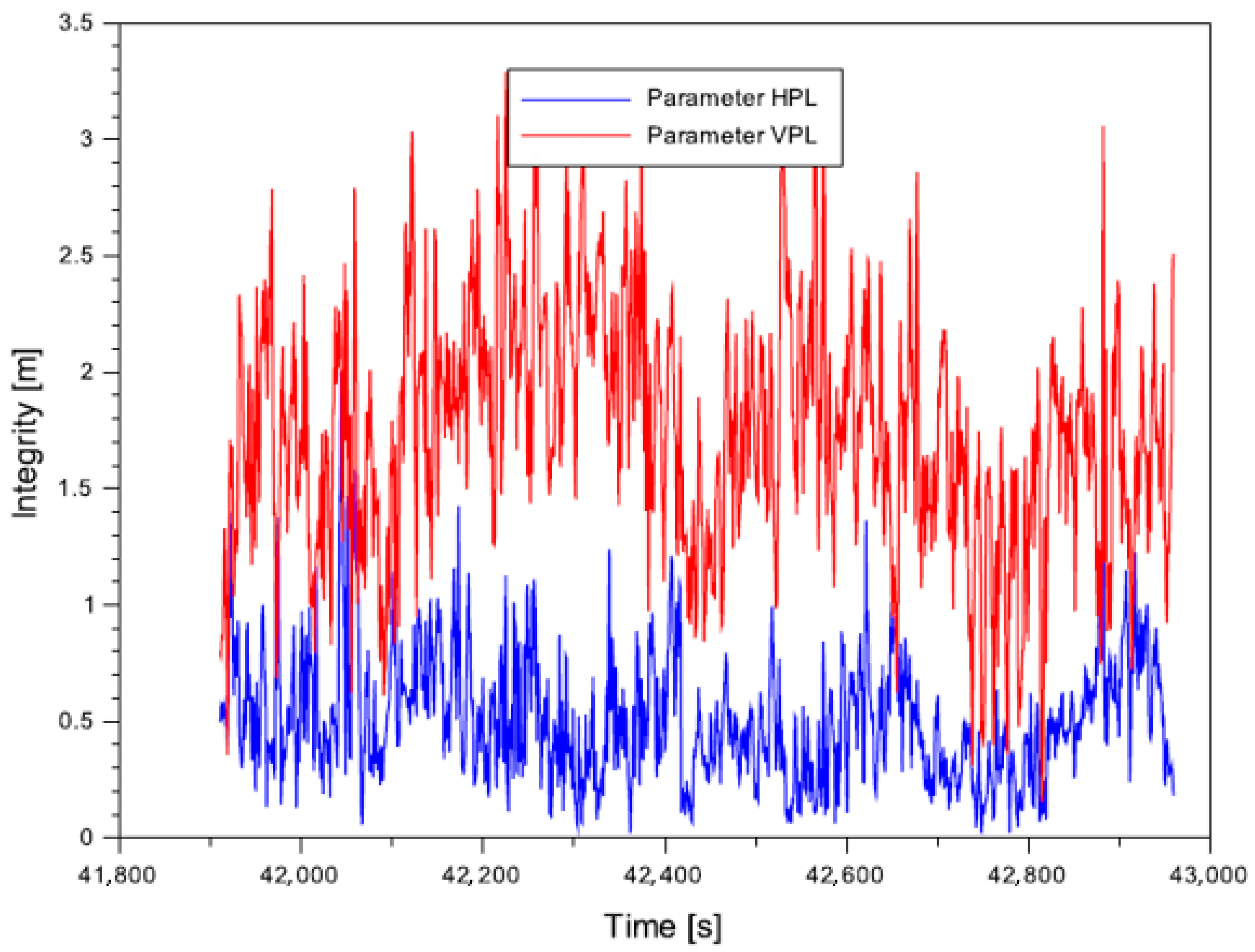
- for the integrity parameter:
- —proportionality coefficient in the horizontal plane for SBAS APV type approach: [2],
- —proportionality coefficient in the vertical plane for SBAS APV type approach: [2],
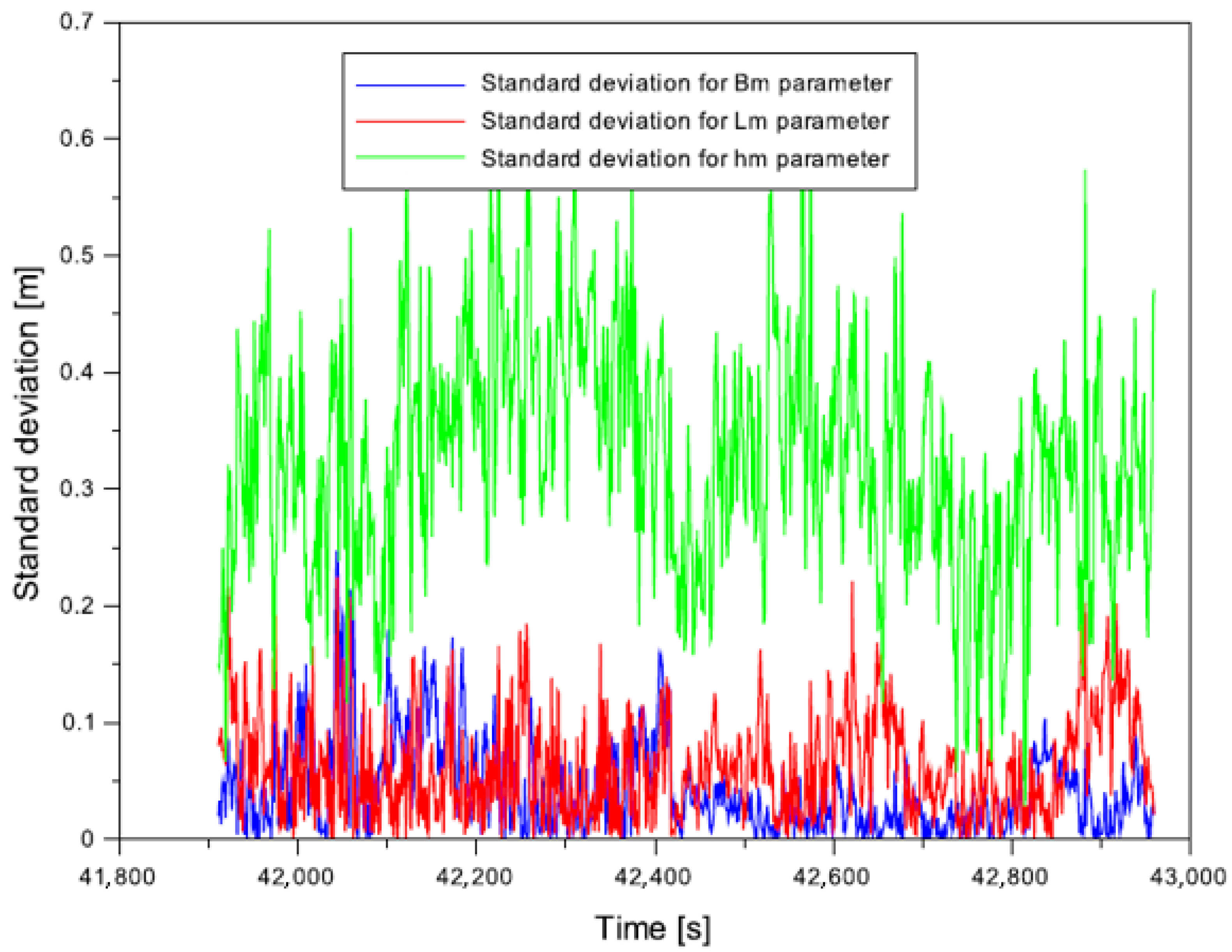
- —standard deviations for coordinates (Bm, Lm, hm) from the solution of (3),
- —level of positioning integrity in the horizontal plane,
- —level of integrity of vertical positioning.
3. Research Experiment
4. Results
5. Discussion
5.1. Validity of the Applied Research Method
5.2. Comparison between the Research Method and Analysis of Scientific Knowledge
6. Conclusions
- -
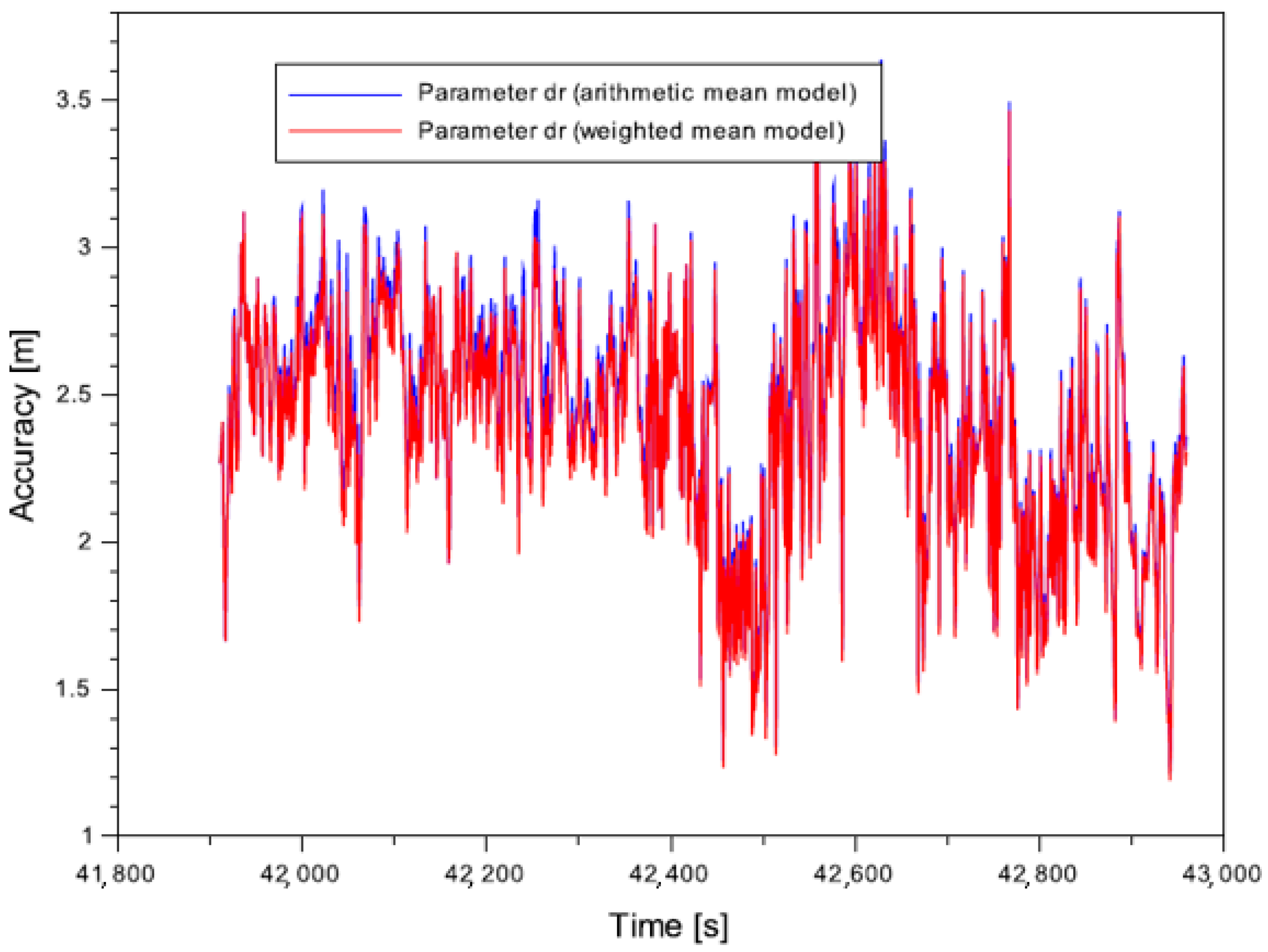
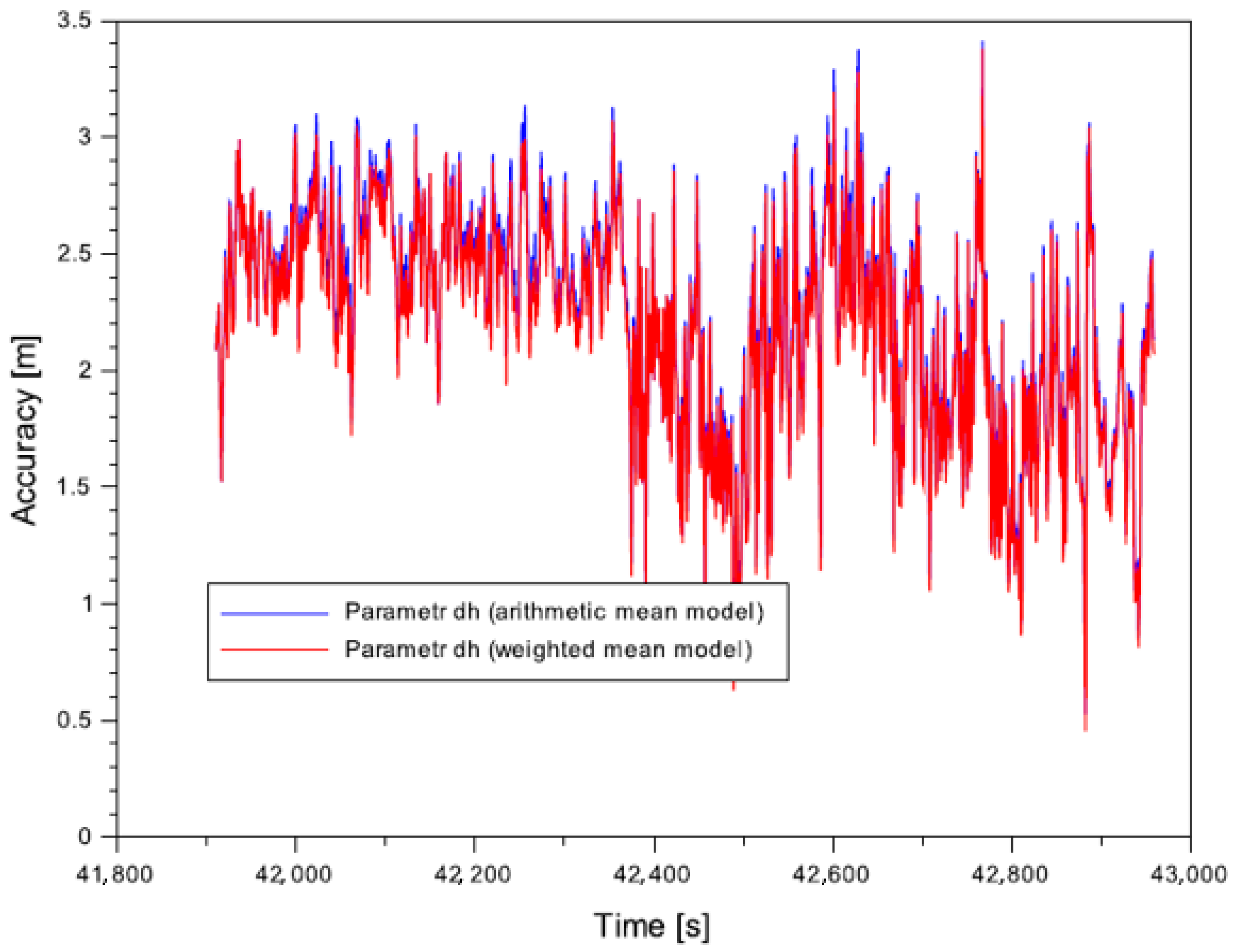
- The values of the standard deviations calculated in the proposed weighted mean model improved by 61–65% in comparison to the traditional arithmetic mean model;
- -
- The resultant position error in 3D space calculated in the proposed weighted mean model improved by 1–7% in comparison to the traditional arithmetic mean model;
- -
- The accuracy of determination of the vertical component h from the proposed weighted mean model improved by 1–14% compared to the standard arithmetic mean model;
- -
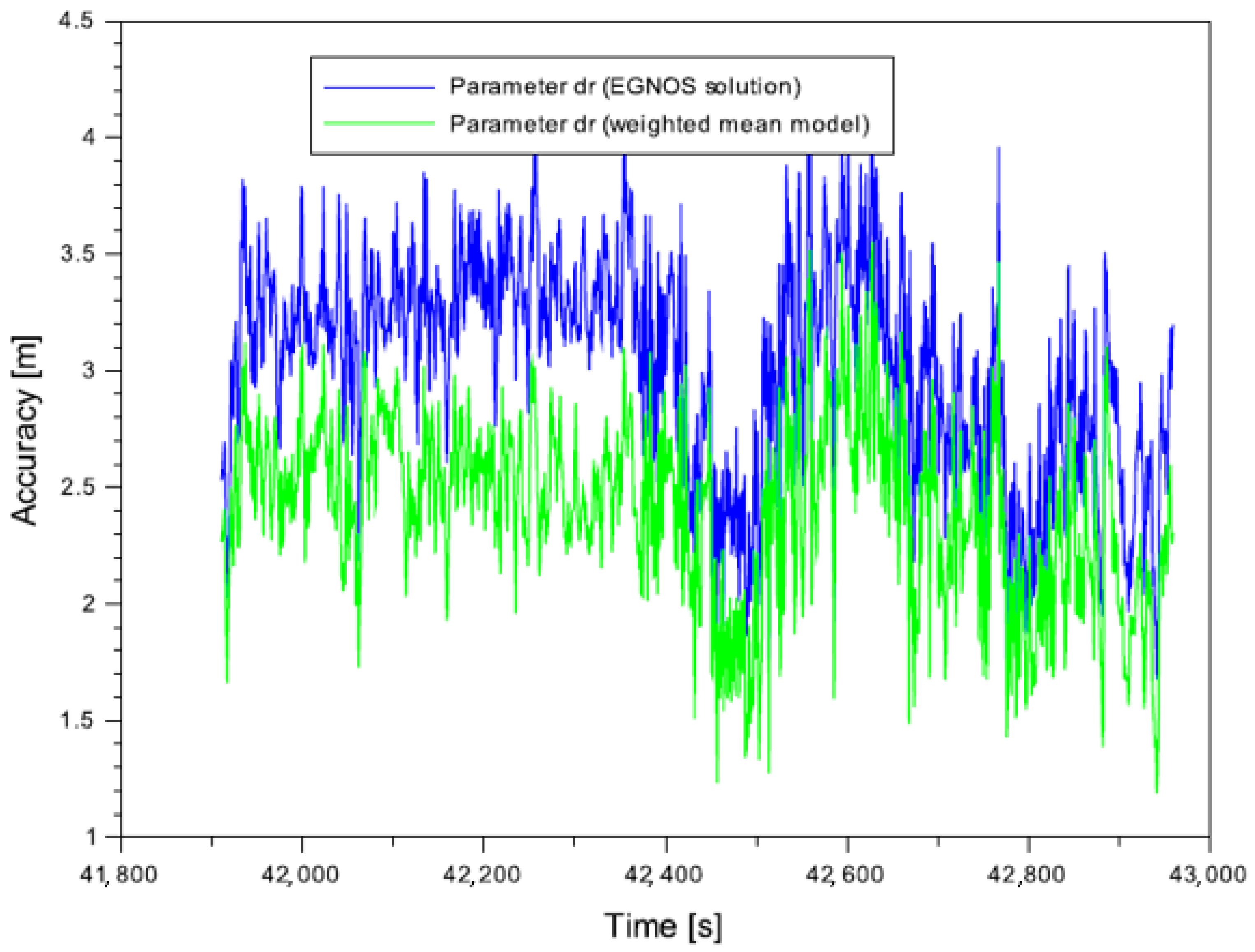
- The resultant position error in 3D space calculated in the proposed weighted mean model improved by 1–37% in comparison to a single SBAS/EGNOS solution;
- -
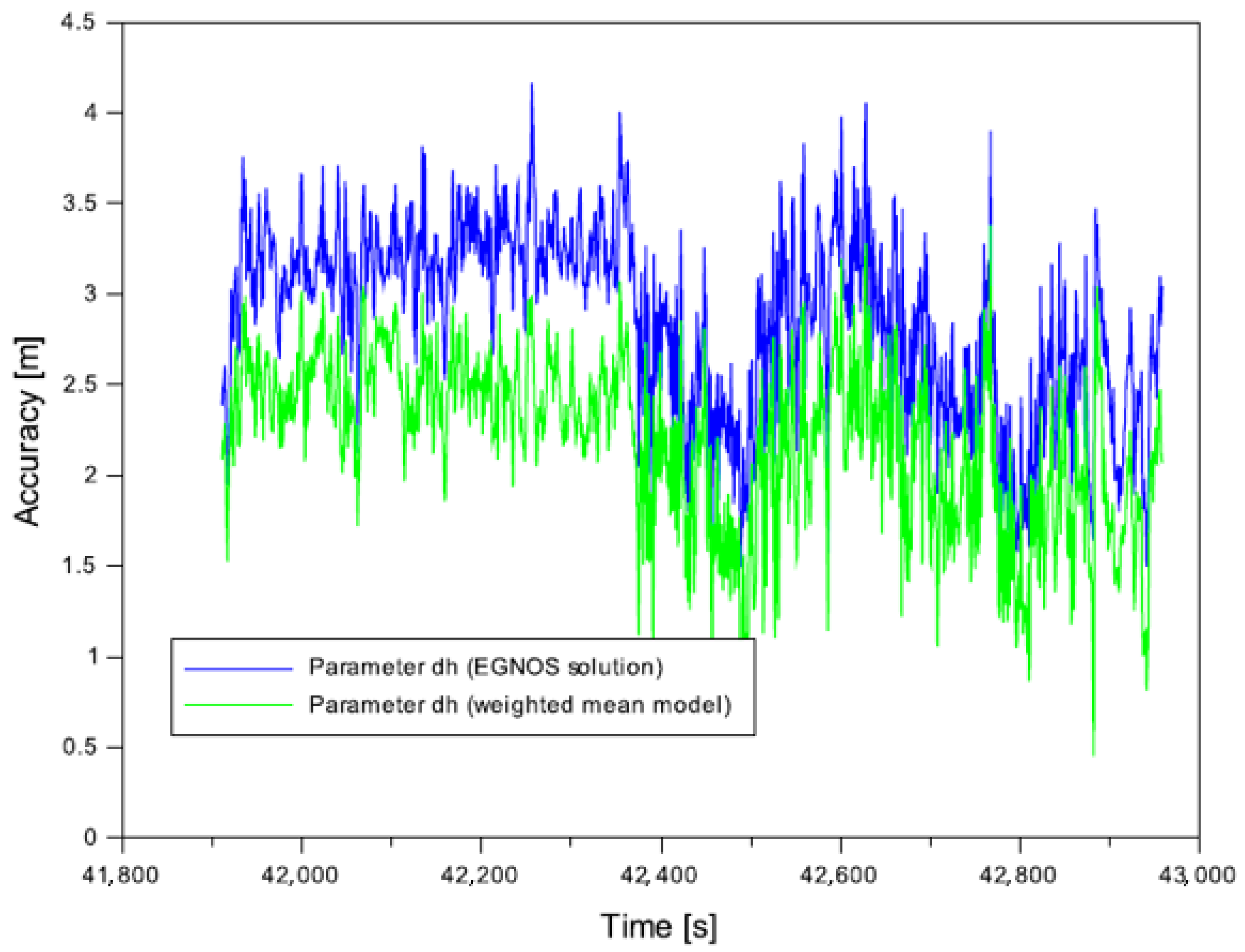
- The accuracy of determination of the vertical component h from the proposed weighted mean model improved by 1–73% compared to a single SBAS/EGNOS solution;
- -
- The application of the Multi-SBAS positioning algorithm resulted in an increase in the nominal results of continuity and availability by 50% in comparison to the arithmetic mean model;
- -
- The values of the integrity parameters (HPL, VPL) determined with use of the proposed weighted mean model improved by 62–63% in comparison to the standard arithmetic mean model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jafernik, H.; Krasuski, K.; Michta, J. Assessment of suitability of radionavigation devices used in air. Sci. J. Sil. Univ. Technology. Ser. Transport. 2016, 90, 99–112. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. ICAO Standards and Recommended Practices (SARPS), Annex 10 Volume I (Radio Navigation Aids). 2006. Available online: www.ulc.gov.pl/pl/prawo/prawo-mi%C4%99dzynarodowe/206-konwencje (accessed on 30 November 2021).
- Ciećko, A.; Grunwald, G. Examination of Autonomous GPS and GPS/EGNOS Integrity and Accuracy for Aeronautical Applications. Period. Polytech. Civ. Eng. 2017, 61, 920–928. [Google Scholar] [CrossRef]
- Grzegorzewski, M. Navigating an aircraft by means of a position potential in three dimensional space. Ann. Navig. 2005, 9, 111. [Google Scholar]
- Krasuski, K.; Wierzbicki, D.; Bakuła, M. Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution. Remote Sens. 2021, 13, 2597. [Google Scholar] [CrossRef]
- Fellner, A.; Banaszek, K.; Trómiński, P. The implementation of the EGNOS system to APV-I precision approach operations. Trans. Nav. Int. J. Mar. Navig. Safe. Sea Transp. 2010, 4, 41–46. [Google Scholar]
- Fellner, A.; Trómiński, P.; Banaszek, K. EGNOS APV-I and HEDGE projects implementation in Poland. Geophys. Res. Abstr. 2009, 11, 4932. [Google Scholar]
- Kaleta, W. Future EGNOS APV procedures implementation in Poland as a chance for small and medium airports development. Trans. Inst. Aviat. 2015, 3, 18–26. [Google Scholar] [CrossRef]
- Kaleta, W. EGNOS based APV procedures development possibilities in the south-eastern part of Poland. Annu. Navig. 2014, 21, 85–94. [Google Scholar] [CrossRef] [Green Version]
- Krasuski, K.; Wierzbicki, D. Monitoring Aircraft Position Using EGNOS Data for the SBAS APV Approach to the Landing Procedure. Sensors 2020, 20, 1945. [Google Scholar] [CrossRef] [Green Version]
- Fellner, R. Analysis of the EGNOS/GNSS parameters in selected aspects of Polish transport. Transp. Probl. Int. Sci. J. 2014, 9, 27–37. [Google Scholar]
- Fellner, A.; Ćwiklak, J.; Jafernik, H.; Tróminski, P.; Zając, J. GNSS for an aviation analysis based on EUPOS and GNSS/EGNOS collocated stations in PWSZ Chelm. Trans. Nav. Int. J. Mar. Navig. Safe. Sea Transp. 2008, 2, 351–356. [Google Scholar]
- Krasuski, K. Application of the GPS/EGNOS solution for the precise positioning of an aircraft vehicle. Sci. J. Sil. Univ. Technology. Ser. Transport. 2017, 96, 81–93. [Google Scholar] [CrossRef]
- Grunwald, G.; Ciećko, A.; Krasuski, K.; Kaźmierczak, R. The GPS/EGNOS Positioning Quality in APV-1 and LPV-200 flight procedures. Commun. Sci. Lett. Univ. Zilina 2021, 23, E23–E34. [Google Scholar] [CrossRef]
- Ciećko, A. Analysis of the EGNOS quality parameters during high ionosphere activity. IET Radar Sonar Navig. 2019, 13, 1131–1139. [Google Scholar] [CrossRef]
- Ciećko, A.; Grunwald, G. The comparison of EGNOS performance at the airports located in eastern Poland. Tech. Sci. 2017, 20, 181–198. [Google Scholar] [CrossRef]
- Ciećko, A.; Grunwald, G.; Ćwiklak, J.; Popielarczyk, D.; Templin, T. EGNOS performance monitoring at newly established GNSS station in Polish Air Force Academy. In Proceedings of the SGEM2016 Conference, Albena, Bulgaria, 30 June–6 July 2016; pp. 239–246. [Google Scholar]
- Ciećko, A.; Grunwald, G. Klobuchar, NeQuick G, and EGNOS Ionospheric Models for GPS/EGNOS Single-Frequency Positioning under 6–12 September 2017 Space Weather Events. Appl. Sci. 2020, 10, 1553. [Google Scholar] [CrossRef] [Green Version]
- Jafernik, H.; Krasuski, K.; Ćwiklak, J. Tests of the EGNOS System for Recovery of Aircraft Position in Civil Aircraft Transport. Rev. Eur. Derecho Naveg. Marítima Aeronáutica 2019, 36, 17–38. [Google Scholar]
- Krasuski, K. The research of accuracy of aircraft position using SPP code method. Ph.D. Thesis, Warsaw University of Technology, Warsaw, Poland, 2019; pp. 1–106. (In Polish). [Google Scholar]
- Kozuba, J.; Krasuski, K.; Ćwiklak, J.; Jafernik, H. Aircraft position determination in SBAS system in air transport. In Proceedings of the 17th International Conference Engineering for Rural Development, Jelgava, Latvia, 23–25 May 2018; pp. 788–794. [Google Scholar]
- Jafernik, H. Assessment of the Usefulness of EGNOS Differential Corrections in Conducting GPS Static Measurements. Int. J. Eng. Res. Appl. 2016, 6, 25–30. [Google Scholar]
- Ciećko, A.; Bakuła, M.; Grunwald, G.; Ćwiklak, J. Examination of Multi-Receiver GPS/EGNOS Positioning with Kalman Filtering and Validation Based on CORS Stations. Sensors 2020, 20, 2732. [Google Scholar] [CrossRef]
- Grzegorzewski, M.; Ciećko, A.; Oszczak, S.; Popielarczyk, D. Autonomous and EGNOS Positioning Accuracy Determination of Cessna Aircraft on the Edge of EGNOS Coverage. In Proceedings of the 2008 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 407–410. [Google Scholar]
- Grzegorzewski, M.; Światek, A.; Ciećko, A.; Oszczak, S.; Ćwiklak, J. Study of EGNOS safety of life service during the period of solar maximum activity. Artif. Satell. 2012, 47, 137–145. [Google Scholar] [CrossRef] [Green Version]
- Felski, A.; Nowak, A. Accuracy and availability of EGNOS—Results of observations. Artif. Satell. 2011, 46, 111–118. [Google Scholar] [CrossRef] [Green Version]
- Ciećko, A.; Grzegorzewski, M.; Ćwiklak, J.; Oszczak, S.; Jafernik, H. Air navigation in eastern Poland based on EGNOS. In Proceedings of the Aviation Technology, Integration, and Operations Conference (ATIO 2013), Los Angeles, CA, USA, 12–14 August 2013; Red Hook: Curran, NY, USA, 2013; Volume 1, pp. 603–613, ISBN 978-1-62993-206-4. [Google Scholar]
- Grunwald, G.; Bakuła, M.; Ciećko, A. Study of EGNOS accuracy and integrity in eastern Poland. Aeronaut. J. 2016, 1230, 1275–1290. [Google Scholar] [CrossRef]
- Ciećko, A.; Grzegorzewski, M.; Oszczak, S.; Ćwiklak, J.; Grunwald, G.; Balint, J.; Szabo, S. Examination of EGNOS Safety-of-Live service in Eastern Slovakia. Ann. Navig. 2015, 22, 65–78. [Google Scholar] [CrossRef] [Green Version]
- Grunwald, G.; Bakuła, M.; Ciećko, A.; Kaźmierczak, R. Examination of GPS/EGNOS integrity in north-eastern Poland. IET Radar Sonar Navig. 2016, 10, 114–121. [Google Scholar] [CrossRef]
- Krzykowska-Piotrowska, K.; Dudek, E.; Wielgosz, P.; Milanowska, B.; Batalla, J.M. On the Correlation of Solar Activity and Troposphere on the GNSS/EGNOS Integrity. Fuzzy Logic Approach. Energies 2021, 14, 4534. [Google Scholar] [CrossRef]
- Tabti, L.; Kahlouche, S.; Benadda, B. Performance of the EGNOS system in Algeria for single and dual frequency. Int. J. Aviat. Aeronaut. Aerosp. 2021, 8, 1–18. [Google Scholar]
- Beldjilali, B.; Kahlouche, S.; Tabti, L. Assessment of EGNOS performance for civil aviation flight phase in the edge coverage area. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 1–25. [Google Scholar] [CrossRef]
- Tabti, L.; Kahlouche, S.; Benadda, B.; Beldjilali, B. Improvement of Single-Frequency GPS Positioning Performance Based on EGNOS Corrections in Algeria. J. Navig. 2020, 73, 846–860. [Google Scholar] [CrossRef]
- Oliveira, J.; Tiberius, C. Landing: Added Assistance to Pilots on Small Aircraft Provided by EGNOS. In Proceedings of the Conference 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 321–333. [Google Scholar]
- Secretan, H.; Ventura-Traveset, J.; Toran, F.; Solari, G.; Basker, S. EGNOS System Test Bed Evolution and Utilisation. In Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, UT, USA, 11–14 September 2001; pp. 1891–1900. [Google Scholar]
- Azoulai, L.; Virag, S.; Leinekugel-Le-Cocq, R.; Germa, C.; Charlot, B.; Durel, P. Experimental Flight Tests with EGNOS on A380 to Support RNAV LPV Operations. In Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 1203–1215. [Google Scholar]
- Breeuwer, E.; Farnworth, R.; Humphreys, P.; Mcgregor, A.; Michel, P.; Secretan, H.; Leighton, S.J.; Ashton, K.J. Flying EGNOS: The GNSS-1 Testbed, Paper Galileo’s World, January 2000. pp. 10–21. Available online: http://www.egnos-pro.esa.int/Publications/navigation.html (accessed on 30 November 2021).
- Fonseca, A.; Azinheira, J.; Soley, S. Contribution to the operational evaluation of EGNOS as an aeronautical navigation system. In Proceedings of the 25th International Congress of the Aeronautical Sciences (ICAS 2006), Hamburg, Germany, 3–8 September 2006; pp. 1–10. [Google Scholar]
- Veerman, H.P.J.; Rosenthal, P. EGNOS Flight Trials, Evaluation of EGNOS Performance and Prospects. In Proceedings of the 2006 National Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 18–20 January 2006; pp. 358–367. [Google Scholar]
- Soley, S.; Farnworth, R.; Breeuwer, E. Approaching nice withthe EGNOS system test bed. In Proceedings of the ION NTM 2002, San Diego, CA, USA, 28–31 January 2002; pp. 539–550. [Google Scholar]
- Butzmuehlen, C.; Stolz, R.; Farnworth, R.; Breeuwer, E. PEGASUS–Prototype Development for EGNOS Data Evaluation–First User Experiences with the EGNOS System Test-Bed. In Proceedings of the 2001 National Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 22–24 January 2001; pp. 628–637. [Google Scholar]
- Perrin, O.; Scaramuzza, M.; Buchanan, T.; Brocard, D. Flying EGNOS Approaches in the Swiss Alps. J. Navig. 2006, 59, 177–185. [Google Scholar] [CrossRef]
- Muls, A.; Boon, F. Evaluating EGNOS augmentation on a military helicopter. In Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, UT, USA, 11–14 September 2001; pp. 2458–2462. [Google Scholar]
- Hvezda, M. Simulation of EGNOS satellite navigation signal usage for aircraft LPV precision instrument approach. Aviation 2021, 25, 171–181. [Google Scholar] [CrossRef]
- Vassilev, B.; Vassileva, B. EGNOS performance before and after applying an error extraction methodology. Annu. Navig. 2012, 19, 121–130. [Google Scholar] [CrossRef] [Green Version]
- Januszewski, J. Satellite navigation systems in coastal navigation. Sci. J. Marit. Univ. Szczec. 2012, 29, 45–52. [Google Scholar]
- Januszewski, J. Satellite Navigation Systems in the Transport, Today and in the Future. Arch. Transp. 2010, 22, 175–187. [Google Scholar] [CrossRef]
- Januszewski, J. A Look at the Development of GNSS Capabilities Over the Next 10 Years. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2011, 5, 73–78. [Google Scholar]
- Januszewski, J. New satellite navigation systems and moderenization of current systems, why and for whom? Sci. J. Marit. Univ. Szczec. 2012, 32, 58–64. [Google Scholar]
- Walter, T.; Blanch, J.; Enge, P. Coverage Improvement for Dual Frequency SBAS. In Proceedings of the ITM ION, Institute of Navigation 2010, San Diego, CA, USA, 25–27 January 2010; pp. 344–353. [Google Scholar]
- Lim, C.-S.; Park, B.; So, H.; Jang, J.; Seo, S.; Park, J.; Bu, S.-C.; Lee, C.-S. Analysis on the Multi-Constellation SBAS Performance of SDCM in Korea. J. Position. Navig. Timing 2016, 5, 181–191. [Google Scholar] [CrossRef]
- Kim, Y.-G.; Park, K.-D. Evaluation of SBAS Positioning Performance According to the Service Region: WAAS, MSAS, EGNOS, SDCM and GAGAN. In Proceedings of the ISGNSS 2019 in Conjunction with IPNT Conference, Jeju, Korea, 29 October–1 November 2019; pp. 347–350. [Google Scholar]
- Lim, C.-S.; Seok, H.-J.; Hwang, H.-Y.; Park, B.-W. Prediction on the Effect of Multi-Constellation SBAS by the Application of SDCM in Korea and Its Performance Evaluation. J. Adv. Navig. Technol. 2016, 20, 417–424. [Google Scholar] [CrossRef] [Green Version]
- Park, K.W.; Park, J.-I.; Park, C. Efficient Methods of Utilizing Multi-SBAS Corrections in Multi-GNSS Positioning. Sensors 2020, 20, 256. [Google Scholar] [CrossRef] [Green Version]
- Urlichich, Y.; Subbotin, V.; Stupak, G.; Dvorkin, V.; Povaliaev, A.; Karutin, S. GLONASS Developing Strategy. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 1566–1571. [Google Scholar]
- Pandele, A.; Croitoru, A.; Ion, M.; Buehler, S. RO-SISMON: Results and Multi-SBAS Fusion at user Level for Non-SoL Applications. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 1124–1143. [Google Scholar]
- Nie, Z.; Zhou, P.; Liu, F.; Wang, Z.; Gao, Y. Evaluation of Orbit, Clock and Ionospheric Corrections from Five Currently Available SBAS L1 Services: Methodology and Analysis. Remote Sens. 2019, 11, 411. [Google Scholar] [CrossRef] [Green Version]
- Cheolsoon, L.; Donghyun, S.; Ho-Yon, H.; Byungwoon, P.; Euiho, K.; Changdon, K.; Seungwoo, S.; Junpyo, P. Performance Analysis on Multi-Constellation SBAS of the Modified L1-only SBAS Message. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 1089–1094. [Google Scholar]
- Boulanger, C.; Suard, N.; Mercier, F.; Rodriguez, C.; Lapeyre, D. Receiver Inter System Bias Impact on SBAS Dual Constellation Positioning and Integrity. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 854–864. [Google Scholar]
- Krasuski, K.; Ciećko, A.; Bakuła, M.; Wierzbicki, D. New Strategy for Improving the Accuracy of Aircraft Positioning Based on GPS SPP Solution. Sensors 2020, 20, 4921. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D. Application the SBAS/EGNOS Corrections in UAV Positioning. Energies 2021, 14, 739. [Google Scholar] [CrossRef]
- Specht, C.; Pawelski, J.; Smolarek, L.; Specht, M.; Dąbrowski, P. Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of Gdansk Using Maritime Dynamic Measurements. J. Navig. 2019, 72, 575–587. [Google Scholar] [CrossRef] [Green Version]
- Specht, M. Determination of Navigation System Positioning Accuracy Using the Reliability Method Based on Real Measurements. Remote Sens. 2021, 13, 4424. [Google Scholar] [CrossRef]
- OGIMET Service Website. Available online: www.ogimet.com (accessed on 30 November 2021).
- Matzka, J.; Stolle, C.; Yamazaki, Y.; Bronkalla, O.; Morschhauser, A. The geomagnetic Kp index and derived indices of geomagnetic activity. Space Weather. 2021, 19, 1–21. [Google Scholar] [CrossRef]
- SWPC NOAA Service Website. Available online: https://www.swpc.noaa.gov/products/planetary-k-index (accessed on 30 November 2021).
- Jakowski, N.; Mayer, C.; Wilken, V.; Hoque, M.M. Ionospheric impact on GNSS signals. Física Tierra 2008, 20, 11. [Google Scholar]
- Peng, Y.; Scales, W.A.; Hartinger, M.D.; Xu, Z.; Coyle, S. Characterization of multi-scale ionospheric irregularities using ground-based and space-based GNSS observations. Satell Navig 2021, 2, 14. [Google Scholar] [CrossRef]
- CODE Service. Available online: Ftp.aiub.unibe.ch (accessed on 30 November 2021).
- Specht, C.; Mania, M.; Skóra, M.; Specht, M. Accuracy of the GPS positioning system in the context of increasing the number of satellites in the constellation. Pol. Marit. Res. 2015, 22, 9–14. [Google Scholar] [CrossRef] [Green Version]
- CNES Service. Available online: Ftp://serenad-public.cnes.fr/SERENAD0 (accessed on 30 November 2021).
- RTKLIB Website. Available online: http://rtklib.com/ (accessed on 30 November 2021).
- Scilab Website. Available online: https://www.scilab.org/ (accessed on 30 November 2021).
- Takasu, T. RTKLIB ver. 2.4.2 Manual, RTKLIB: An Open Source Program. Package for GNSS Positioning. 2013. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 30 November 2021).
- ASG-EUPOS Service Website. Available online: Asgeupos.pl (accessed on 30 November 2021).
- Wu, J.; Wang, K.; El-Mowafy, A. Preliminary Performance Analysis of a Prototype DFMC SBAS Service over Australia and Asia-Pacific. Adv. Space Res. 2020, 66, 1329–1341. [Google Scholar] [CrossRef]
- Zalewski, P. Integrity Concept for Maritime Autonomous Surface Ships’ Position Sensors. Sensors 2020, 20, 2075. [Google Scholar] [CrossRef] [Green Version]
- MGEX IGS Service website. Available online: https://igs.org/mgex/constellations/#sbas (accessed on 30 November 2021).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPS Time [hh:mm:ss] | Value [TECU] |
|---|---|
| 07:00:00 | 9.2 |
| 08:00:00 | 12.6 |
| 09:00:00 | 16.1 |
| 10:00:00 | 19.1 |
| 11:00:00 | 21.3 |
| 12:00:00 | 22.6 |
| Parameter | Value [m] |
|---|---|
| 0.72 | |
| 0.63 | |
| 2.23 |
| Parameter | Value |
|---|---|
| Availability | 100% |
| Continuity | 0.0000699 to 0.0005595 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krasuski, K.; Mrozik, M.; Wierzbicki, D.; Ćwiklak, J.; Kozuba, J.; Ciećko, A. Designation of the Quality of EGNOS+SDCM Satellite Positioning in the Approach to Landing Procedure. Appl. Sci. 2022, 12, 1335. https://doi.org/10.3390/app12031335
Krasuski K, Mrozik M, Wierzbicki D, Ćwiklak J, Kozuba J, Ciećko A. Designation of the Quality of EGNOS+SDCM Satellite Positioning in the Approach to Landing Procedure. Applied Sciences. 2022; 12(3):1335. https://doi.org/10.3390/app12031335
Chicago/Turabian StyleKrasuski, Kamil, Magda Mrozik, Damian Wierzbicki, Janusz Ćwiklak, Jarosław Kozuba, and Adam Ciećko. 2022. "Designation of the Quality of EGNOS+SDCM Satellite Positioning in the Approach to Landing Procedure" Applied Sciences 12, no. 3: 1335. https://doi.org/10.3390/app12031335
APA StyleKrasuski, K., Mrozik, M., Wierzbicki, D., Ćwiklak, J., Kozuba, J., & Ciećko, A. (2022). Designation of the Quality of EGNOS+SDCM Satellite Positioning in the Approach to Landing Procedure. Applied Sciences, 12(3), 1335. https://doi.org/10.3390/app12031335