4.1. Multispeed Discrete Transmission
The main motivation of applying multispeed discrete transmission in an EV, similar to ICE vehicles, is to provide the most suitable gear ratio in the powertrain so that the motor can operate efficiently for diverse driving conditions. Since EV motors typically are capable of producing high torque output from very low RPM, the number of gears for an EV is expected to be very minimal, as few as two gears, as opposed to the ones used in the ICE vehicle. Latest works done to evaluate the efficiency difference between the EV powertrain with single-speed transmission and two-speed transmission were described in [
27,
28]. In [
27], the comparison was conducted using simulation model-based estimation by taking into account vehicle parameters, reference motor’s data and three driving cycles, namely the New European Driving Cycle (NEDC), Worldwide Light Duty Test Cycle (WLTC) and US Environmental Protection Agency (EPA) Federal Test Procedure for city driving (FTP-75). Firstly, the simulation model was run using an EV powertrain with a single speed transmission for the three driving cycles. Thereafter, the simulation results of the WLTC were used to determine the appropriate size of two gear ratios for improving the power consumption, and then the model was rerun using the newly determined ratios. Using the WLTC results, instead of NEDC and FTP-75, was logical, considering that it is the most power demanding cycle that covers diverse driving phases of urban, suburban, rural and highway scenarios. Besides, it also saves a significant amount of work and computing time as opposed to using the results from all three driving cycles. The comparison results showed that efficiency improvements were measured at the range of 1.7 to 2.4% with the two-speed transmission for the three driving cycles. It must be highlighted, however, that [
27] emphasized on obtaining the gear ratios for powertrain efficiency only, without consideration of the driving performance. In terms of driving performance, the typical target is to achieve fast acceleration with minimum jerking, which leads to contradictory requirements between this and achieving maximum powertrain efficiency. Besides, the gearshifting model must also be incorporated into the powertrain simulation model to allow a realistic evaluation of the jerking. Finally, an advanced optimization method must be implemented in the model for optimizing the gear ratios for powertrain efficiency and fast acceleration with minimum jerking.
In the subsequent work by [
28], the comparison was conducted using an electric bus model that runs in a specific city driving cycle with a two-speed dual clutch transmission (DCT). A DCT allows fast gearshifting thanks to its capability to pre-select the next gear before the shifting is done by the engagement of the second clutch. Such capability is not available for a single clutch automated manual transmission (AMT) and a conventional automatic transmission. The driving cycle, on the other hand, was obtained based on an existing bus route in Espoo, Finland. The powertrain model took into account not only the vehicle parameters and the motor’s data, but also the efficiency mapping of the inverter. Based on the model, an exhaustive search algorithm was implemented to determine the size of the two gear ratios for optimum efficiency. The results proved that, first, the efficiency gain was in the range of 2 to 3.2%, which is consistent with the findings in [
27], secondly, the application of two-speed transmission opened up the option to use a more cost-effective motor with a narrow high efficiency range, and, lastly, further studies are still required to evaluate the application particularly in terms of maintenance cost, to assess how much higher the cost will be as compared to single-speed transmission. Nevertheless, unlike [
27,
28] focused on maximizing the efficiency during city driving with the speed below 60 km/h and frequent starts-stops. Hence, the results are applicable only for a very specific city driving cycle. Moreover, no details on the gearshifting mechanism are provided, which means that further study to evaluate the jerking during gearshifting is required. This is particularly very important since the driving cycle studied here involves frequent start-stops. Finally, ref. [
28] also considered the application of CVT with metal belt, which they found out that was less desirable due to the significant power losses in the belt. This is expected because of the high hydraulic pressure requirement to clamp the belt, especially since higher torque is required to move the bus as opposed to the passenger cars. Therefore, using such CVT in heavy vehicles, like a bus, is less practical as compared to using it in passenger cars.
Another study covering the implementation of multispeed discrete transmission in an electric bus was described in [
29] where a four-speed automated manual transmission (AMT) was used. In the transmission, two DC electric motors were used for gearshifting, where one motor was used to select gear 1 and gear 2, while another motor was used to select gear 3 and gear 4. Because of this configuration, the shifting from gear 2 to gear 3 required sequential operation of both motors, thus it is expected to take longer time and higher actuation power than the shifting of gear 1 to 2 as well as gear 3 to 4. The shifting performance was evaluated experimentally on a test bench in terms of efficiency and shifting time. Based on that, a complete powertrain model for the electric bus was developed so that the optimized gearshifting strategy (defined as the optimal gearshifting points with respect to vehicle speed and throttle’s opening) can be determined for minimum power consumption and minimum shifting frequency. The optimized gearshifting strategy was formulated based on the actual Beijing city driving data representing two driving conditions; high urgency driving with frequent acceleration and higher average speed, and, gentle driving with less frequent acceleration and lower average speed. Then, the four-speed AMT with the optimized gearshifting strategy was tested on a dynamometer to gauge its workability. Unlike the works in [
27,
28,
29] provided the details of gearshifting mechanism in the AMT, hence analysis on the shifting time can be done realistically. However, further improvement in the shifting time here to match the DCT’s performance is challenging due to the operation of two DC motors in the mechanism. This means that the shifting time can be minimized only if the number of motors can be reduced, which is possible only with the reduction of the number of gears. Therefore, the next area that can be focused on in [
29] is the optimization of the gear ratios so that the possibility to reduce the number of gears can be explored. Besides, study on the jerking during gearshifting can also be carried out here thanks to the availability of the AMT’s prototype.
Subsequently, research works in [
30,
31,
32] described the working principle of two-speed transmissions using planetary gearset for application in an EV powertrain. In terms of the planetary gearset design, the transmission was similar to a conventional automatic transmission for ICE vehicles. However, in terms of actuation system for its clutches and brakes, the proposed one used electro-mechanical actuation system that featured DC motor and a screw nut system. The significant benefit of using the screw nut system is that it provides self-locking mechanism, hence the desired gear can be maintained without exerting continuous hydraulic pressure on the clutches and brakes. This will improve the transmission’s efficiency since no power is required to generate the needed pressure. The challenge, however, is the complexity to integrate the design of the screw nut system with the clutches and brakes. Besides, the system also has to handle very high thrust force between the pulley (rotating based on motor’s power) and the screw (rotating only during ratio shifting to axially move the pulley). If not properly optimized, this will lead to excessive tear and wear in the screw nut system, and also power loss in the thrust bearing. In the research works conducted by [
30,
31,
32], the focus was to minimize the jerking by properly implementing various gearshifting strategies with different objectives; first, to maintain a constant transmission input torque, second, to maintain a constant transmission output torque, and third, to maintain a semi-constant transmission output torque. In terms of efficiency analysis, however, no results and comparison were presented between the proposed transmission and the typical single speed transmission in an EV.
A summary of the works described in [
27,
28,
29,
30,
31] is presented in
Table 1, highlighting the potential of multispeed discrete transmissions in improving the efficiency of EV powertrains. However, these works still insufficiently discussed the topic of gear ratio optimization which is crucial to achieve not only powertrain efficiency, but also desirable driving performance. In addition, details on the gearshifting mechanism were also rarely provided, which means that analyses of the jerking and actuation power consumption during gearshifting are still lacking.
Optimizing the best two-speed gear ratios, however, is not straightforward due to its multi-objective nature. For instance, the best ratios should be able to achieve the desirable driving performance (in terms of acceleration rate and top speed), and minimum power consumption. These objectives consistently contradict each other, and they are influenced by diverse parameters like the road gradient and instantaneous vehicle speed. Thus, advanced optimization techniques are required, for instance, a work by [
33] focused on the optimization of two gear ratios based on specific gearshift scheduling strategy that took into account three parameters; vehicle speed, vehicle acceleration and road gradient. As a comparison, the usual parameter used for gearshift scheduling is the throttle position. In the work, an AMT was used and its baseline gear ratios were set at 10.00 and 5.20 for the overall gear ratio 1 (G1) and 2 (G2), respectively. For the shifting strategy, the motor speed of 3000 RPM is set as the reference for the driving due to its high efficiency in that speed, and G1 is reserved for low vehicle speed (0 to 25 km/h), and G2 is reserved for high vehicle speed (65 to 120 km/h). Between 25 to 65 km/h, the suitable ratio was selected based on the motor efficiency and power output at a particular vehicle speed, while the baseline buffer zone of 40% was set between the upshifting and the downshifting lines to avoid too frequent gear shifting. Subsequently, the baseline ratios and shifting’s buffer zone were optimized using two methods: gradient descent and pattern search. Simulated under NEDC (to reflect flat road condition) and Economic Commission for Europe (ECE) Extra Urban driving cycle (to reflect gradient road), the optimized model produced a 4% and 7.5% reduction in the power consumption as compared to the baseline model, respectively. Next, the performance of the optimized model was compared against a conventional gearshift model. The conventional gearshift model consists of the same ratios as the optimized model, but it uses a conventional gearshifting strategy based on throttle. The comparison showed that the optimized model led to almost 18% energy saving over the conventional model for the gradient road driving cycle (ECE Extra Urban). However, for the flat road driving cycle (NEDC), the conventional model was slightly more efficient at about 3 to 4%. These results highlighted the contribution of two different gearshifting strategies in optimizing powertrain efficiency for driving cycles involving diverse road gradients. Nevertheless, for the actual application of these strategies, an additional system is required to activate the suitable strategy. In this case, a gradient detection system is required so that the road gradient can be measured to activate the proposed gearshifting strategy. Therefore, further comparisons between the proposed strategy and the conventional strategy should be carried out on more driving cycles (instead of just NEDC and ECE Extra Urban) to provide clearer picture on the importance of implementing two different gearshifting strategies.
Figure 5 presents a graphical summary of the work performed by [
33]. In short, it can be concluded from the work, that highly flexible gear shifting strategy is crucial in optimizing EV driving mileage, and such flexibility is possible with the optimized multispeed transmission in the EV powertrain.
Other works involving the optimization of multispeed discrete transmission in EV can be found in [
34,
35,
36,
37,
38,
39]. However, unlike [
33,
34] they presented the optimization of two-speed transmission in an electric truck subjected to specific gradient route without heavy traffics, and the motor’s efficiency mapping also included regenerative braking efficiency. The two-speed transmission mainly consisted of two planetary gearsets with two brakes to select the desired gear ratios. The brakes were actuated using a DC motor through a worm gear and worm wheel (
Figure 6). The worm wheel was designed with an inner spiral guide, allowing it to convert its rotation about the axis of the motor’s shaft into an axial movement. Depending on its rotational direction, the worm wheel, at one time, could press and lock either the first brake (engaging gear 1) or the secondary brake (engaging gear 2), accordingly. The application of worm gear here provides an advantage in terms of big torque multiplication, which leads to the possibility of using compact motor to engage the brakes. However, the worm gear is more vulnerable to tear and wear than the usual gear wheels, which means frequent gear shifting here will very likely lead to high maintenance cost. The shifting strategy used here, in contrast to [
33] that took into account the road gradient, involved only throttle position and motor speed as the parameters and the driving cycle was designed to reflect an operation in an iron mine. Apart from vehicle speed, the studied driving cycle also took into account change in the weight, considering the delivery of iron ore, and also drastic change of gradient, considering the geography of the mine. Based on the aforementioned shifting strategy and driving cycle, the two ratios of the transmission were optimized for efficiency and acceleration using particle swarm optimization (PSO). The results showed that, when compared against one-speed transmission, the optimized two-speed transmission managed to reduce the overall power consumption by 6.1%, contributed by efficiency motor’s operation during driving and regenerative braking, but the gain in acceleration was very minimal. In terms of shifting strategy, for the future study, it is interesting to evaluate if there will be any efficiency improvement if the same strategy as described in [
33] (consider road gradient as parameter for gearshifting) is to be implemented here in [
34] (do not consider road gradient as parameter for gearshifting). The efficiency difference between them is crucial for evaluating the viability of considering the road gradient in the gearshifting strategy.
Another study involving regenerative braking for a two-speed transmission was described in [
35], where a two-speed planetary gearset was used. Here, the main objective, instead of maximum efficiency, was to minimize jerking during the braking. The regenerative braking procedure was divided into three phases: driving phase, brake engaging phase, and braking phase. These phases were proposed to minimize torsional oscillations, that causes the jerking, by optimally synchronizing the application of hydraulic service braking and the motor’s braking torque during the brake engaging phase. As a result, the jerking was reduced by around 55% as opposed to the conventional regenerative braking that does not consider such oscillations.
Next, ref. [
36] presented a work carried out to optimize the gear ratios of two-speed DCT based on not only the motor’s efficiency, but also the transmission efficiency. In the work, the transmission efficiency model was developed by taking into account the losses at the gear meshing, bearings, clutch and concentric shaft. Thus, different gear ratios produced different efficiency in transmitting the torque between the input and the output shafts. Based on the model, the optimum gear ratios were selected for the EV powertrain, and its performance was compared against a single-speed EV powertrain for Worldwide Harmonized Light Vehicles Test Procedure (WLTP) cycle, which showed an efficiency improvement around 10.7 to 12.1%. Regarding the transmission efficiency, research in [
37] explained a possible method to improve it by modifying the tooth profile of the gears which can potentially reduce not only the loss in the gear meshing, but also the required effort for the gearshifting. In [
38], on the other hand, a two-speed EV powertrain model were optimized using genetic algorithm (GA) with the objectives to achieve quick 0–100 km/h acceleration (driving performance) and minimum power consumption (efficiency) under NEDC. The type of transmission used in the model were not specifically mentioned, hence the shifting mechanism involved was unknown. However, the model included regenerative braking efficiency model. Unlike many papers that emphasized on optimizing the size of the gear ratios, the work in [
38] optimized not only the gear ratios, but also the maximum motor’s output torque in Nm and its maximum rotational speed in RPM. The motor’s torque and RPM were optimized within the range of 150–200 Nm and 8000–12,000 RPM, respectively. In order to obtain the balance optimization results, specific weightage was given to both of the objectives: driving performance and efficiency. The results showed that it was possible to achieve a balance (compromised) solution between the driving performance (quick acceleration) and efficiency (power consumption) by optimizing the two gear ratios and the motor’s maximum torque and speed. Nevertheless, different set of gear ratios, or a continuous ratio range between 1.341 and 3.050, were required to achieve the fastest possible acceleration and highest possible powertrain efficiency. This meant that, to achieve maximum performance and efficiency in a single powertrain system, the gear numbers must be higher than 2. In a discrete transmission, however, increasing the gear number must be done together with redesigning the gearshifting mechanism which leads to increased design complexity and cost.
Figure 7 shows summary of the optimization work done in [
38] using GA to determine the optimum gear ratios and motor’s outputs for driving objectives. Based on the results, if a continuous ratio range between 1.341 to 3.050 can be provided by one transmission (like a continuously variable transmission), then all the objectives can be met, instead of opting for a compromised two gear ratios in a two-speed transmission.
Another interesting work regarding EV powertrain with discrete gear transmission was presented in [
40], which experimentally evaluated the performance of three different transmission ratios—6.00, 8.00 and 10.00—for one driving cycle. Among the ratios, 8.00 served as the benchmark for the results’ analysis. In the experiment, the test vehicle was tested on the same track using three different one-speed transmissions, corresponding to the three ratios. The results showed that, with the gear ratio of 10.00, the power consumption was higher by 4.2% as compared against the benchmark. The authors argued that the increase was caused by the possibility of fast acceleration provided by the ratio, hence the driver has the tendency to often accelerate suddenly. On the other hand, the power consumption can be reduced by 2.4% when the ratio of 6.00 was used, since it was claimed that with that ratio, the driver was forced to drive with using gentler acceleration. From the work, three important conclusions can be drawn. Firstly, driving style is critical for the power consumption of an EV with one-speed transmission, thus, encouraging drivers to drive economically plays an important role in increasing EVs’ efficiency. Secondly, the size of the gear ratio has some influence on a person’s driving style which ultimately affects the driving power consumption, and thirdly, multispeed transmissions can offer flexibility to suit drivers ‘ driving preferences, which means that the EV can then be driven either to achieve maximum efficiency, or with an aggressive driving style.
A summary of the works presented in [
33,
34,
35,
36,
37,
38,
39,
40] is provided in
Table 2 and they highlighted the significance of optimizing the gear ratios and the gearshifting strategy to achieve powertrain efficiency and driving performance. Some of these works have started to discuss on the gearshifting mechanism, but analysis on jerking and actuation power usage during shifting was still limited. Moreover, since some of the gearshifting mechanisms are novel, new study areas concerning their durability and practicality must also be covered in the future.
The latest works related to gearshifting mechanism and its control are described in [
41,
42,
43,
44,
45,
46,
47,
48,
49,
50]. Researchers in [
41,
42,
43] argued that criteria for the EV motor to operate efficiently is not just the application of the multispeed discrete transmission but also smooth gearshifting process with minimum jerking and actuation power usage. Reference [
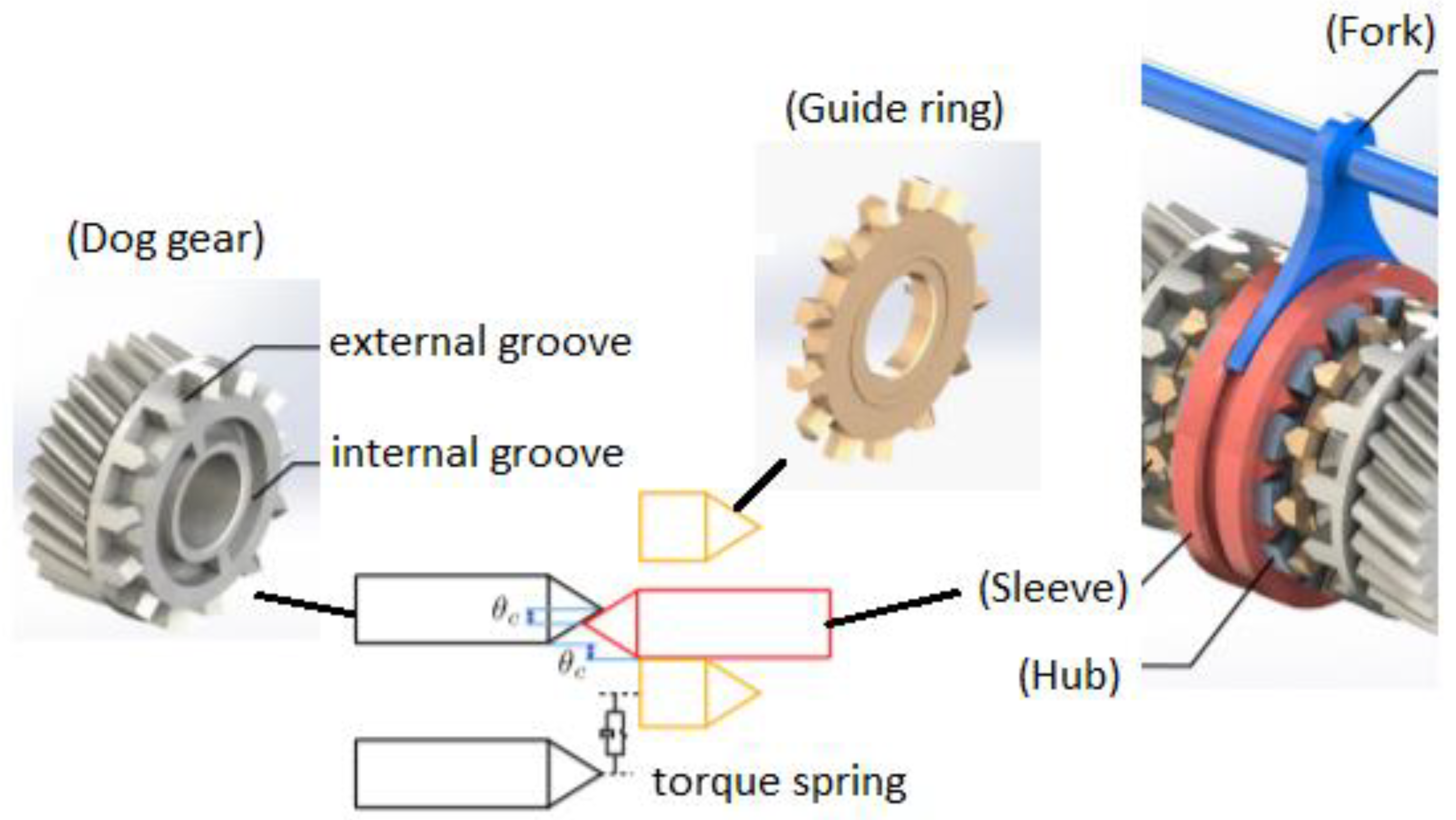
44], on the other hand, explained jerking effects in relation to friction clutch, one-way clutch and types of the driveline. The jerking effects were evaluated under three common shifting scenarios: upshifting during driving, downshifting during driving, and downshifting during braking. In general, smooth shifting is not only beneficial for driving comfort, where it avoids excessive jerking and torque interruption, but it also helps in terms of the overall powertrain efficiency. Thus, a novel clutchless AMT was proposed in [
41,
42,
43] featuring a unique synchronizer called bilateral Harpoon-shift synchronizer. Such a synchronizer uses a torque spring, constructed based on multiple bended coil springs, inside the dog body’s internal groove to keep the dog gear damped to the guide ring (
Figure 8). This results in quick synchronization of the guide ring and the dog gear without using frictional cones, and also smooth shifting due to the spring’s damping effect. Additionally, the spring also helps in reducing the required axial force for shifting; minimizing the required DC motor’s work to actuate the fork for shifting. Hence, faster and more efficient shifting process can be done with a compact DC motor. However, the spring also causes additional normal force between the guide ring and the sleeve, and this causes friction force between them during the shifting process. This eventually leads to an extra load that must be overcome by the motor.
Another novel synchronizer design that featured springs inside it was also presented in [
45]. Meanwhile, the work in [
46] reported the optimization of the gearshifting with the objectives to minimize shifting time, friction work, due to the engagement and disengagement of the clutch during shifting, and jerking. The optimization was conducted using the Legendre pseudospectral method and the gearshifting model was simplified as two degree of freedom (2-DOF) and 4-DOF dynamic models based on a friction clutch and a sleeve shifting mechanism in a two-speed transmission. The results were divided into four different patterns: the least shifting time, the least friction work, the least jerking, and finally, the compromised solution. In the compromise solution, obtained in the 2-DOF model simulation, the shifting time was recorded at 0.92 s, with the square of continuous jerking measured at 0.48 (m/s
3)
2, and the friction work at 1856 J. In the work, however, no detailed descriptions of the actual actuators used for the clutch and the gearshift sleeve was provided, which can be the focus for future works.
Subsequent research work performed to analyze the performance of shifting mechanism was described in [
47,
48], where a two-speed dry clutch inverse AMT (I-AMT) was used to vary the gear ratios with very minimal torque interruptions with help from two one-way clutches. The one-way clutches, on the other hand, were integrated into the first gear and the second gear separately, hence the shifting can be achieved by actuating only a single dry clutch. Prior to that works, another study has been carried out, as described in [
50], to evaluate the clutch control of a wet dual clutch two-speed transmission for EV application. The objective of the study was to experimentally quantify the clutch control’s performance in terms of jerking and engagement time. However, because of the usage of the wet clutch, some power was lost due to the clutch actuation. Not only that, but the gearshift quality was also less desirable due to the high jerking at around 10 m/s
3, signifying noticeable torque interruption during the shifting. Besides, the sticking characteristics of the wet clutch, due to its hydraulic system, caused difficulty to optimize the clutch control for minimum jerking and engagement time. For improvement, other type of clutch, like a dry clutch system with electro-mechanical actuator, can be implemented, so that the clutching and gearshifting can be precisely controlled based on the motor’s torque to minimize jerking and shifting time. Returning to the work explained in [
47,
48], a dry clutch was used, and its slip control was optimized using high-order disturbance observer to minimize jerking and shifting time, and the clutch control was then tested experimentally in a small EV during upshifting and downshifting. The dry clutch was actuated by a DC motor. The results were encouraging, with the jerking measured at most around 3 m/s
3, which is significantly lower than the widely accepted threshold of 10 m/s
3. Nevertheless, the operation of I-AMT involved frequent slipping in the dry clutch, hence its durability is expected to be compromised. This leads to the possible increase in the maintenance cost against a simpler single-speed transmission EV powertrain. Thus, detailed study in this aspect is crucial to quantify its long-term operation. Further studies on optimizing the gearshifting mechanism were explained in [
49], in which the application of torque sensor was proposed in a two-speed DCT so that precise clutch engagement force can be regulated to fit the desired clutch torque for optimum shift quality. The torque sensor allowed precise real time torque measurement which is crucial to regulate the clutch engagement for optimum engagement time with minimum jerking. However, the application of torque sensor required significant cost, which will increase the transmission’s cost tremendously. This unfortunately makes the option of implementing the torque sensor in the actual transmission impractical.
More advanced studies related to EV powertrain with two-speed discrete transmission focused on the shifting strategy that adapts driver behaviors are described in [
51]. Previous studies on the methods to recognize driver behaviors can be read in [
52,
53,
54], covering its application in a fuel cell vehicle and HEV, but none of them was conducted specifically for EV powertrains with two-speed transmissions. However, all of the literatures have certain similarities, in the sense that, the throttle opening rate was used as the indicator for the behavior, and then fuzzy logic was applied to predict the suitable driving style corresponding to the modified standard driving cycles based on driving aggressiveness. Subsequently, the baseline driving style (usually established based on conventional practice) was optimized in the literatures by embedding the correcting factor representing the fuzzy logic’s output. Therefore, in [
51], they also proposed a predictive model based on a fuzzy neural network (FNN) to recognize the driver’s intention via the actual throttle opening rate. Simultaneously, the learning vector quantization neural network (LVQNN) method was used to select the appropriate driving cycle by comparing the actual vehicle speed data against three predetermined different driving cycles. These predetermined cycles were obtained offline based on samples generated from the driving cycles of New York City Cycle (NYCC) UDDS and HWFET. Finally, a correcting factor, representing the outputs from FNN and LVQNN, was introduced to the baseline shifting strategy to optimize it for efficiency and driving performance. The baseline shifting strategy was formulated by taking into account the motor’s efficiency, throttle opening and battery’s SOC at 40% and 70%. Comparison between the baseline shifting strategy with and without the correcting factor, through simulation and dynamometer testing, showed an average efficiency improvement of up to 2%, proving the benefits of adapting driver behaviors in the shifting strategy.
A summary of the works related to the gearshifting mechanisms and the adaption of driver behaviors in [
41,
42,
43,
44,
45,
46,
47,
48,
49,
50,
51] is presented in
Table 3. In terms of gearshifting mechanisms, the works reviewed here mostly discussed their standalone performance in terms of jerking and shifting time, while limited discussions were carried out to evaluate their performance when integrated in a powertrain system. This means that the question on the potential improvement efficiency and driving performance in a complete powertrain system is still not properly answered. Nevertheless, with the numerous novel designs of gearshifting mechanism proposed recently by the researchers, the outlook of developing and implementing multispeed discrete transmission, especially two-speed transmission, in a commercialized EV looks promising.
Overall, it can be summarized that the research works on multispeed discrete transmission for EV mainly focused on the implementation of two-speed discrete transmission which can be in the form of AMT or DCT. The two-speed design is very compact, which means the additional weight relative to the usual single-speed transmission can be kept to a minimum. Besides, the two gear ratios provide the necessary flexibility in the EV driving modes’ selection for optimum efficiency and driving performance. The main challenge, however, is how to optimize the gear ratios and the shifting strategy so that the gains in powertrain efficiency and driving comfort can be maximized. Several optimization methods have been implemented to optimize the gear ratios and the shifting strategy, and the results highlighted the capabilities of the two-speed transmission to reduce the power consumption by up to 16% for some driving cycles. However, more work is still required to evaluate the operation and controls of the gearshifting mechanisms in a complete powertrain in terms of efficiency and driving performance. For now, the studies on gearshifting mechanism mostly focused on assessing its jerking and shifting time, with very limited discussion to answer question on its contribution to the overall powertrain’s efficiency.
4.2. Continuously Variable Transmission (CVT)
The main motivation of utilizing CVT in EV, identical to the multispeed discrete transmission, is to provide variable transmission ratios so that the motor can operate optimally for diverse driving conditions. In general, there are many types of CVT available for automotive application, but in this review paper, the focus will be on CVT that uses pulleys and metal belt which is the most widely used type currently in automotive. Unlike multispeed discrete transmissions, CVTs with metal belts offer a continuous ratio range, which mean more ratios are available to be chosen to suit the driving conditions. In this sense, a CVT is more flexible than any multispeed discrete transmission, hence, the motor has a much better chance to operate optimally for a longer duration of the driving. However, this type of CVT has certain limitations in terms of power loss in the metal pushing V-belt, or metal chain, used to transmit the torque between the primary pulley; connected to the motor, and the secondary pulley; connected to the vehicle’s wheels. The loss is caused by a portion of motor power consumed to produce the required high clamping force to clamp the belt for the torque transmission between the pulleys. Research in [
55] discussed the possibility of controlling the appropriate CVT ratio using fuzzy logic based on the motor’s efficiency mapping as the reference. The fuzzy control algorithm was tested in a simulation model developed based on three driving routes differentiated in terms of road gradients. While the controller helped in enhancing the motor’s efficiency throughout the routes, more detail studied are still required particularly for the ratio and clamping force actuation system of the CVT which was not explained in the paper. Subsequently, in 2017, ref. [
56] suggested that a CVT, with a possibility to clamp the belt using an electro-mechanical actuation system with self-lock capability, has the potential to increase the powertrain efficiency. They explained that, unlike conventional CVT that uses engine power to generate hydraulic pressure to clamp its metal belt, such CVT eliminates the required power consumption for the clamping since the self-lock mechanism can held the clamping force. Thus, more power can be transmitted to the wheels, and its ratio can also be selected more efficiently. For an EV, this is particularly beneficial since the motor can operate with high flexibility, resulting in improved powertrain efficiency and increased driving mileage. However, to incorporate the self-locking mechanism required extensive design modifications on the CVT’s pulleys as well as integration of the DC motor to actuate the mechanism accordingly.
Next, refs. [
57,
58] reported their research involving an evaluation of four different DCTs and a CVT applied in an EV. The four DCTs were differentiated in terms of the number of gear ratios (from single to four-speed), and the size of the gear ratios were determined based on the gradient climbing requirement (first gear), high speed driving (top gear) and the progression factor for the intermediate gears. Thus, the gear sizes, as well as the gearshifting strategy, were not optimized based on suiting any driving cycle. The ratio range of the CVT, on the other hand, was defined based on the continuous ratio range between the first and the top gears of the DCTs. In addition, the CVT was also considered to use electro-mechanical actuation system, instead of the conventional hydraulic system, to vary its ratio and to clamp the belt. Therefore, its efficiency was considered to be significantly higher as compared to the existing CVT used in any ICE vehicle. Also, the manufacturing cost for the CVT was considered to be lower than the two-speed transmission in the research. All the transmissions were then simulated based on a hybrid driving cycle established by combining FTP-75 and HWFET. The results showed that, CVT was the best performer in terms of efficiency for a B-segment car, reduced the power consumption by 31.9% against the single-speed transmission, followed by the three-speed DCT (19.1%), four-speed DCT (18.2%) and the two-speed DCT (16.4%). This result highlighted the magnitude of improvement that can be gained by eliminating the losses in the hydraulic actuation system conventionally used in a CVT with metal belt. Moreover, it also emphasized the saturation in the increment of the gear numbers in a multispeed discrete transmission, which in this case, it can be observed by the reduction of the efficiency improvement between the three-speed DCT and the four-speed DCT. This means that the saturation point here is at three gears, and further increases in the gear numbers will only cause significant actuation losses in the additional shifting mechanism added for the extra gear ratios. The rather low saturation point is typical for a small car (i.e., B-segment) due to its narrower range of the power required as opposed to a bigger car (i.e., E-segment). For a E-segment car, the results showed that CVT was the best performer (23.6%), followed by the four-speed DCT (15.2%), three-speed DCT (9.0%) and two-speed DCT (9.6%). This result suggested that the saturation point for E-segment EV could be higher than four gears for a multispeed discrete transmission, which is logical considering its wider range of power required as opposed to B-segment car. Based on these results, CVT seems more promising, provided that a reliable electro-mechanical actuation system can be successfully integrated in its pulleys system. To achieve this, further research works are still required, especially in the areas of the workability and durability of the electro-mechanical actuation system in the CVT, since such actuation system is still relatively new and has not been implemented previously in any commercialized CVT with metal belt.
Other works discussing the application of CVT in EV powertrain were presented in [
59,
60]. In [
59], the potential of CVT’s continuous ratio range to improved EV power consumption was assessed against the single-speed, two-speed AMT and two-speed DCT EV powertrains. In the assessment, all types of transmissions were considered to have the same constant efficiency of 97%. The assessment was conducted based on an analytical model of the motor’s efficiency, and it showed that with CVT, the powertrain efficiency can be improved by about 3% for WLTP cycle against the other discrete multispeed transmissions. However, more detail analysis, particularly on the CVT’s efficiency, is required, because the application of CVT conventionally involves high hydraulic pressure for clamping and ratio shifting. Thus, without optimization on the hydraulic actuation system, it is inappropriate to assume that the CVT has the same efficiency as the discrete multispeed transmission. Subsequently, in [
60], the CVT was considered to be using the optimized electro-hydraulic actuation system (more compact and requiring low power for generating the belt’s clamping force) and the novel single loopset belt (as opposed to the typical metal pushing V-belt, hence more compact design and reduced power losses). On top of that, the possibility of downsizing of the motor was also studied, where it was achieved through the reduction of the rotor’s diameter and inertia. Nevertheless, the work did not take into account the optimization of the transmission ratios and the shifting strategy. When the powertrain was simulated under WLTC, it showed a 12.7% efficiency improvement against the EV powertrain with single speed transmission. That, however, was less than the two-speed AMT that produced a 13.5% improvement. The lower improvement was very likely caused by the hydraulic actuation system. Even though the system was optimized, the required belt’s clamping force was still very high (depending on the EV motor’s torque) and must be provided continuously during operation. Hence, continuous power to generate the clamping force, albeit lower thanks to the optimization, was still needed. The AMT, on the contrary, used geartrain to transmit the power, hence no requirement for the belt’s clamping force. This means that the continuous power for the clamping force was eliminated entirely. This situation also affected the power flow in the powertrain, which can compromise the driving performance and this can be observed in the 0–100 km/h acceleration time, where the AMT and the single speed transmission yielded 6.9 s, while the CVT achieved 7.4 s. Based on the results, it appeared that AMT is the better transmission for EV than the CVT, although it must be noted that with the latter, it is possible to eliminate torque interruption during ratio shifting.
Research work described in [
61] explained optimization and discretization of the CVT ratios so that optimum power consumption can be realized with as minimum shifting as possible. The CVT featured an electro-hydraulic actuation system, where an electric pump was used to precisely control the required hydraulic pressure for clamping and ratio shifting (
Figure 9). The rationale of discretizing the ratios was to avoid too frequent shifting would lead to uncomfortable driving due to jerking, as well as power losses in the hydraulic actuation system. The discretizing process started by first establishing the appropriate number of ratios based on the relation between the energy cost and the ratio number. Hence, the number of ratios was set at four, and the ratio sizes were determined through an equal ratio series method. Then, these ratios were optimized using GA for optimum efficiency when undergoing a combined driving cycle that comprised of UDDS, NYCC and HWFET. For the driving cycle simulation, three ratio shifting strategy models were employed; first, continuously variable ratio shifting strategy, where the best ratio was selected continuously during driving for maximum efficiency, second, the discrete ratio shifting strategy based on the ratios established through the equal ratio series method, and third, the discrete ratio shifting strategy based on the ratios optimized through GA. Comparison between the results confirmed that the third strategy performed the best, with the minimum total power consumption and average jerking, measured at 8.10 kWh and 4.32 m/s
3, respectively. The first and second strategies, meanwhile, recorded 8.16 kWh and 5.35 m/s
3, as well as 8.69 kWh and 4.65 m/s
3, respectively. To summarize, the work reported in [
61] highlighted two very important findings. Firstly, CVT provides a continuous ratio range, hence the ratios can be discretized and optimized to suit diverse vehicle parameters, which means the same CVT can be implemented for several type of EVs for optimum driving performance and efficiency. Secondly, high ratio number presents better flexibility for motor’s operation, but it also leads to complicated shifting logic which will cause too frequent shifting, resulting in the power losses in the actuation and compromised driving comfort. This presented an opportunity to apply the same CVT with different sets of discretized ratios to suit the requirements of diverse EV segments, which can contribute in terms of cost reduction in the transmission production.
One of the latest works describing the application of CVT in an EV powertrain can be accessed in [
62]. This work presented an optimization of the EV ownership cost by taking into account the components’ cost and the electricity cost for all the components involved in the powertrain; battery, motor (with inverter), and, CVT. The optimization was carried out using convex programming design optimization, with the targets to minimize the cost; by a means of optimizing the size of the motor and battery, without compromising the driving performance in terms of 0–100 km/h acceleration time (at most 11 s), top speed of 165 km/h and gradeability of 30%. In the work, three powertrain models were evaluated; first, the base powertrain model taken from the actual EV that used single speed transmission, second, the modified powertrain model, which essentially the based model with CVT instead of the single speed transmission, and lastly, the optimized powertrain model, in which the CVT ratio as well as the size of the main powertrain components were optimized based on the actual driving data obtained from road and dynamometer tests. Similar to [
61], the CVT evaluated in [
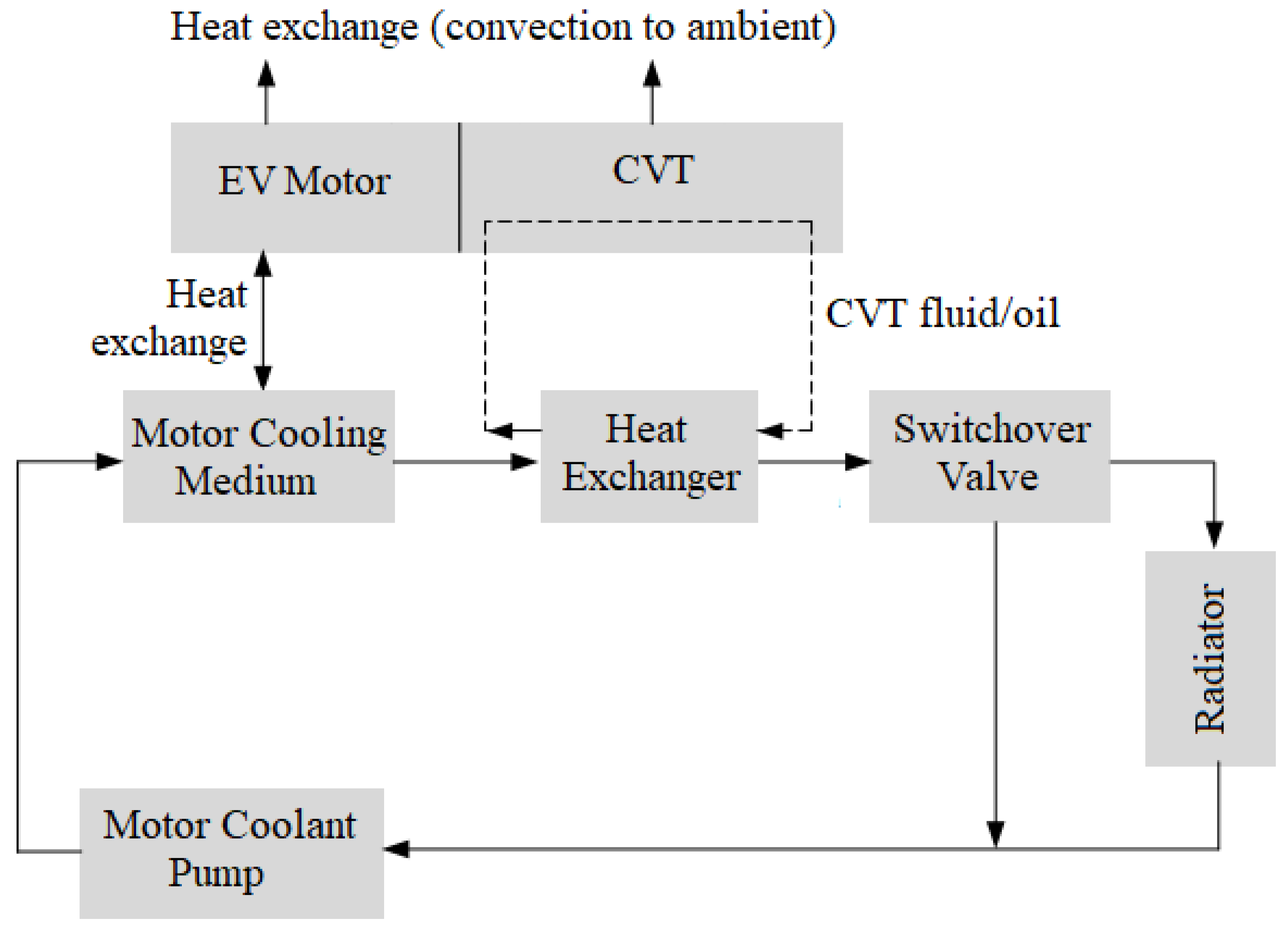
62] also used electro-hydraulic actuation system for belt’s clamping and ratio changing. However, the design integrated the cooling system of both the CVT and the motor, where the heat from the CVT fluid was dissipated to the motor’s coolant through a heat exchanger, and then the coolant would be cooled down by the radiator (
Figure 10). As a result, an extra radiator for the CVT was unnecessary, and this led to a more compact and cost-effective thermal management system. By simulating all the powertrain models under WLTC, the results showed that the optimized powertrain model performed the best in terms of efficiency (11.19 kWh/100 km, means 2.1% improvement against the base model with 11.43 kWh/100 km) and cost (2% cost reduction against the base model). In terms of cooling power consumption, the optimized model also gained an improvement of 30% as compared to the base model, and this means that the integrated thermal management system was not only cost effective, but it was also very efficient in controlling the operating temperature of the motor and the CVT. Besides, the integrated system also presents an opportunity for further integration with the battery’s thermal management system which will potentially lead to further improvements in terms of cost and efficiency. Nevertheless, power losses in the hydraulic actuation system can still be expected, and it is interesting to evaluate how the optimized CVT performs against a two-speed transmission with optimized gear ratios.
Another paper that discussed the potential cost benefit of using CVT in an EV can be found in [
63]. Here, the application of CVT was complemented by the hybrid battery technology that incorporated a supercapacitor, and the cost benefits considered not only the component and electricity cost, but also the battery replacement cost. The CVT used an electro-mechanical actuation system for clamping and ratio changing, which means it featured a self-lock mechanism to maintain the belt’s clamping force without using hydraulic pressure. The actuation system comprised of two DC motors with presumably power screw mechanism, each for actuating the primary pulley and the secondary pulley. So, theoretically, it was more efficient than the CVT described in [
61,
62] thanks to the self-lock capability. However, detail description on the CVT’s actual electro-mechanical actuation system was not described in the paper. The CVT losses model was developed to estimate its efficiency, and based on the model, the efficiency was estimated between the range of 78% to 89%. When simulated under a combined driving cycle of HWFET and FTP-75, the usage of the electro-mechanical CVT reduced the motor’s losses by 37.9%, which was translated into 8.3% improvement in the power consumption of the vehicle when compared against single speed transmission. In terms of battery degradation, using CVT reduced the degradation by 7.2% as opposed to the single speed transmission, and, with the proposed hybrid battery technology, the improvement rate can be increased further to 17.5%. The battery degradation was defined in terms of capacity loss percentage, estimated using the LiFePO4 cell’s dynamic model that took into account the charging rate and the battery temperature during driving [
64,
65]. The latest review paper providing further descriptions on the estimation techniques for battery state of health in an EV can be accessed in [
66]. Finally, in terms of cost benefits for 11-year of operation, when compared the application of CVT against single speed transmission (both using the hybrid battery technology), a saving of around USD 4541 can be expected for the consumers for the battery cost, resulted from the reduction of the required battery capacity due to the improvement in the powertrain efficiency. In addition, a further saving of USD 1768 can also be gained due to the reduction in the electricity cost. In overall, after reflecting the battery replacement cost as well as the penalty cost for using CVT, the total cost benefit was estimated at USD 3178 for 11-year of operation.
More advanced research on CVT application in an EV powertrain was explained in [
67] which involved the optimization of an eco-driving strategy. The optimization objective was to minimize the reduction of the battery’s SOC during the driving by taking into account not only the motor’s efficiency, but also the instantaneous SOC as well as the efficiency of the CVT. Here, the CVT efficiency model was developed using mathematical equations introduced in [
68,
69,
70]. NEDC was used as the driving cycle, in which it was divided into three driving conditions, namely, constant driving speed, acceleration condition and deceleration condition. In these conditions, the powertrain efficiency was analyzed for different SOC, CVT ratios and ambient temperature. One interesting aspect of this work is that it analyzed the SOC until the range of below 10%. Such SOC is rarely discussed in other literatures because in the actual application, the cut-off set point for the battery is usually set at around 20% to avoid any risk of damage. The analysis showed that, low SOC (at about 10%) decreased the powertrain efficiency by 33.12% and the acceleration time became longer by 68.8%. Such inefficiency was caused by the degradation of the battery that becomes significant starting from 10% SOC and lower. Because of the degradation, the battery internal resistance increases and its open circuit voltage decreases, which resulting in the increase losses percentage in the current flow from the battery to the EV motor. Moreover, at 10% SOC, the battery also became more sensitive to ambient temperature, which caused the losses in the current flow to increase even further. Above 10% SOC, however, the ambient temperature was insignificant in influencing these parameters, and the battery degradation was negligible, hence powertrain efficiency became more stable. By incorporating this knowledge in the eco-driving strategy, the constant driving speed condition in the NEDC can be increased from 61 to 70%, and the total driving time can be reduced by 12.1%, resulting in a more economical driving. This study highlighted the importance of eco-driving method that can only be implemented if the EV powertrain has the required flexibility in providing diverse driving modes. In addition, the study also served as the starting point to integrating battery’s health conditions in the powertrain analysis.
To summarize, CVTs can provide better flexibility in ratio selection due to their continuous ratio range as opposed to any multispeed discrete transmission. This flexibility allows the EV’s motor to operate optimally for various driving conditions. However, for the actual operation of the CVT in an EV, an appropriate shifting strategy must be formulated, either continuous shifting or discretized shifting. The first strategy leads to better motor efficiency, but requires higher actuation power and advanced shifting logic. The second strategy, on the other hand, compromises the motor’s efficiency slightly as compared to the first strategy, but its shifting logic can be made simpler and the actuation power consumption can be reduced. Another area that has to be studied is the actuation system for ratio shifting and belt’s clamping in the CVT. Here, three possibilities can be explored; either optimizing the hydraulic actuation system typically used in the existing CVT, or implementing electro-mechanical actuation system to replace the hydraulic actuation system in the CVT, or, developing geartrain-based design of CVT. By optimizing the hydraulic actuation system, the power required to generate continuous pressure for CVT ratio and belt’s clamping force can be reduced. However, since the required belt’s clamping force is still very high (around at least 10 kN and it increases with the increment of the motor’s torque), thus the amount of required power will always be significant. As compared to any multispeed discrete transmission, such issue is eliminated thanks to the application of geartrain. Implementing electro-mechanical actuation system, on the other hand, eliminates the power requirement for the continuous pressure due to its self-lock mechanism, but, designing and integrating such system in a CVT requires extensive study to confirm not only its workability but also its reliability. A summary of the literature review on the CVT application for EV powertrains can be found in
Table 4.
4.3. Multi-Motor Configuration
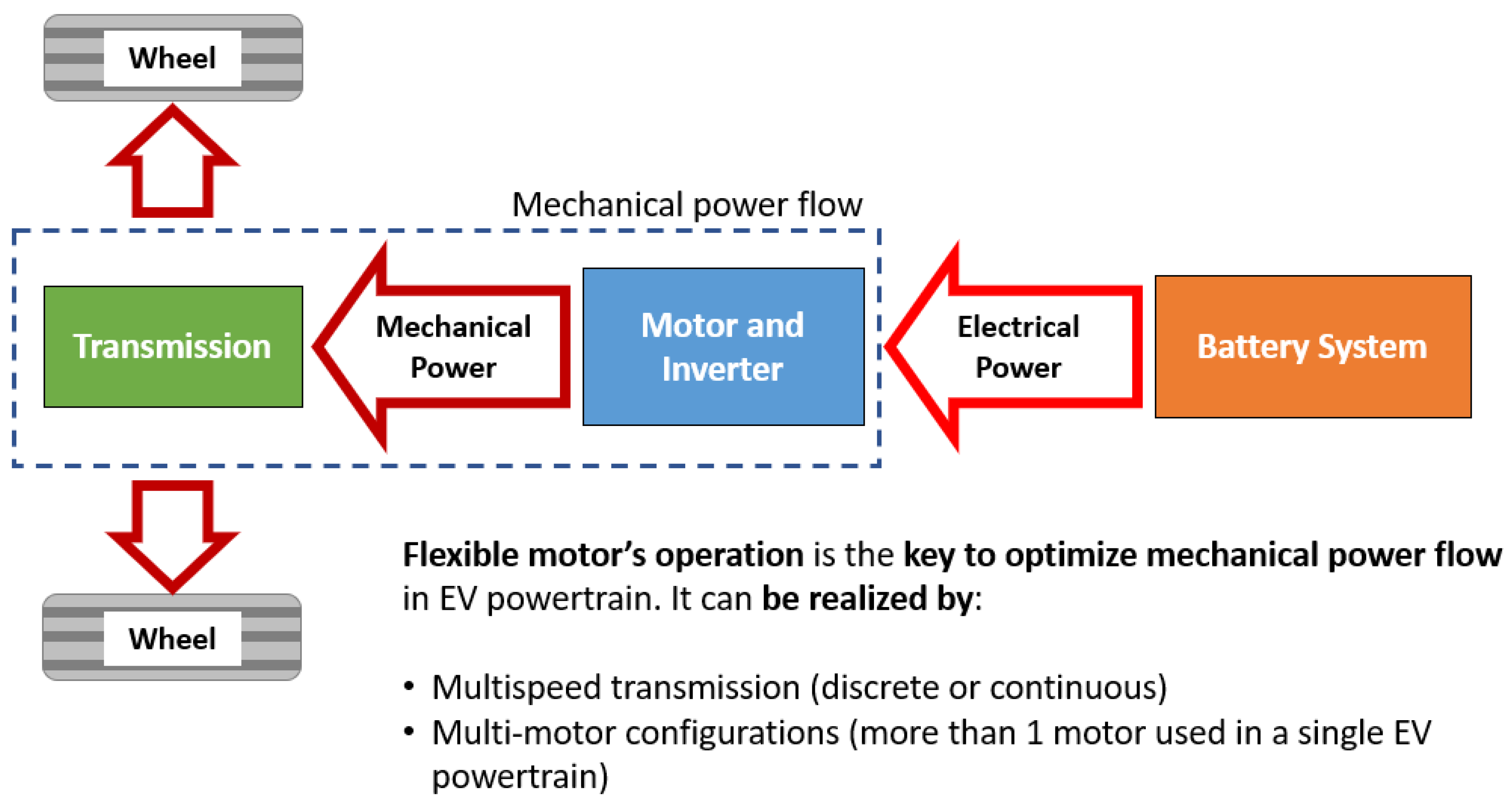
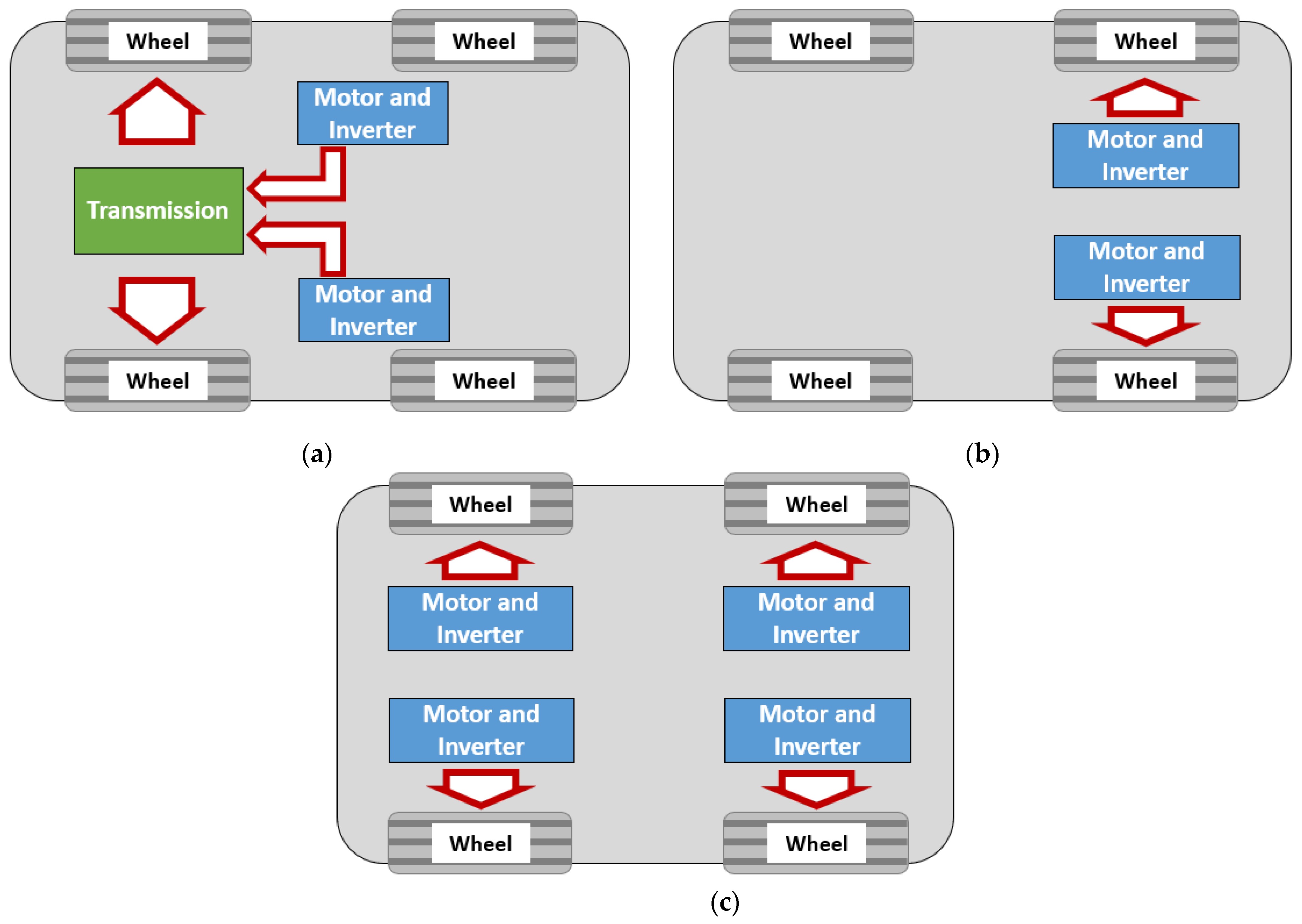
The idea of optimizing EV powertrains using a multi-motor configuration involves properly distributing the driving loads, typically between two motors or four motors, so that they can operate optimally under various driving conditions. Additionally, in some situations, these motors can also provide boosting power for faster acceleration and higher top speed. As a result, the capacity of the motors can be reduced without compromising the driving performance and this leads to potentially significant cost savings. There are three common types of multi-motor configuration studied for EV; the first one is two-motors configuration where both motors are connected to a transmission before the wheels, the second is the two-motors configuration where both motors are directly coupled to the wheels, and finally, the four-motors configuration where all motors are directly coupled to the wheels (
Figure 11).
In the two-motors configuration where two motors are connected to a transmission before the wheels, allowing torque and speed couplings between the motors is crucial to suit diverse driving conditions. As shown in
Figure 12, torque coupling means the torque from the ICE and the motor is combined through direct gearwheel, resulting in the shared torque requirement between them at the wheels. Equations describing the output torque and speed of the coupling are shown in Equations (1) and (2). Speed coupling, on the other hand, means the speed of the ICE is combined with the motor’s speed through planetary gearset, resulting in higher speed, hence higher power, at the wheels (
Figure 13). Equations (3) and (4) explain the relationship between the motors’ inputs and the coupling’s outputs. Torque coupling is generally useful for start-stop condition, while speed coupling is usually applied to achieve fast acceleration and high-speed driving. Latest examples for the optimization of HEV powertrain configurations can be read in [
71,
72,
73]. In Peng et al. [
71], various HEV powertrain configurations based on CVT with metal belts and discrete gear automatic transmissions as the torque coupling, and a planetary gearset as the speed coupling, were generated using a fundamental matrix. In the work, feasible driving modes of these configurations were determined using an adjacency matrix, and based on these modes, the powertrain configurations were evaluated and compared against the benchmark configuration (
Figure 14a) in terms of 0–100 km/h acceleration time and average power consumption under WLTC. The results demonstrated that the best configuration, as depicted in
Figure 14b, managed to reduce the acceleration time and the average power consumption by 8.7% and 12.2%, respectively. Such improvements were possible because of the flexible driving modes provided by the proposed configuration that resulted in the reduced ICE power required for some driving conditions (due to the planetary gearset at the motor’s output), and more efficient regenerative braking (due to the several torque coupling possibilities at clutch C3 and C2). Results in [
71] are also consistent with those discussed in [
73], where it was found that the combination of CVT and planetary gearset is crucial to optimize the HEV’s efficiency for various vehicle speeds.
Outcomes in [
71,
72,
73] highlight the importance of a proper strategy for torque and speed coupling between two or more motors that can lead to flexible driving modes for an EV. Thus, to evaluate its implementation in EV [
74,
75,
76,
77], studied the effects of using multi-motor configurations in EV powertrain on the power consumption based on several driving cycles. In [
74], the same two motors were used in a two-motor EV powertrain configuration, and the powertrain was evaluated based on three different torque distribution strategies between the motors, where the final strategy was optimized using adaptive non-linear PSO. In [
75], on the contrary, two motors with different maximum torque were used where they were connected through planetary gearset. Here, only speed coupling is possible, and these motors were controlled using a combination of speed feedback control strategy and torque feedforward control strategy to minimize jerking during the shifting of the driving modes. Other papers describing the implementation of dual motor configuration with planetary gearset can be read in [
76,
77], and because they allowed only speed coupling, the flexibility in terms of driving modes was limited.
Meanwhile, in [
78], three configurations of two motors EV powertrain without multispeed transmission were considered; configuration for torque coupling (
Figure 15a), configuration for speed coupling (
Figure 15b), and a configuration for both torque and speed couplings (
Figure 15c). Therefore, this configuration offered significant improvement in driving modes flexibility. In the first configuration, a single planetary gearset was used, in which the first motor was directly connected to the gearset’s sun gear, while the second motor was connected to the same sun gear through a clutch. For the second configuration, two planetary gearsets were used with a brake at their ring gears. The first motor was meshed to the sun gear of the first planetary gearset, and the planet carrier here was rotatable. The second motor, on the contrary, was connected to the second planetary gearset’s sun gear, where its planet carrier was fixed to the casing. The engagement of the brake on the ring gears of both gearsets was used to control the speed coupling in the configuration. Finally, the third configuration was essentially a heavily redesigned second configuration, that now has a clutch between the sun gears, and the rotation of the second planet carrier was controllable through another brake. As a result, the third configuration was more flexible, thanks to its capability to provide both torque (through the clutch between the sun gears) and speed couplings (through the brake at the ring gears). The benchmark in the study was a single motor EV powertrain with single-speed transmission. The gear ratios of all these powertrain configurations were optimized using non dominated sorting GA (NSGA-II) for optimum efficiency under UDDS, HWFET and NEDC. Compared to the single motor EV powertrain with single-speed transmission, in average, the single motor with two-speed transmission was about 2% more efficient, while the first, second and third two motors EV powertrain configurations were 5.77, 5.57 and 6.40% more efficient, respectively. It was interesting to note here, that the efficiency of the first two motors configuration (capable of torque coupling only) and the second configuration (capable of speed coupling only) were pretty much the same, although, in terms of mechanical system, the latter was significantly more complex than the former due to the application of two planetary gearsets. Next, for the second configuration with speed coupling and torque coupling options, the design was much more complex since it required three actuators for the two brakes and a clutch. With the difference of only 0.63% in terms of efficiency gain between the first and the third configurations, it was logical to choose the first configuration for an actual implementation. Therefore, in the future work for [
78], more studies can be carried out to compare the driving and gearshifting performance of these configurations so that more aspects can be evaluated.
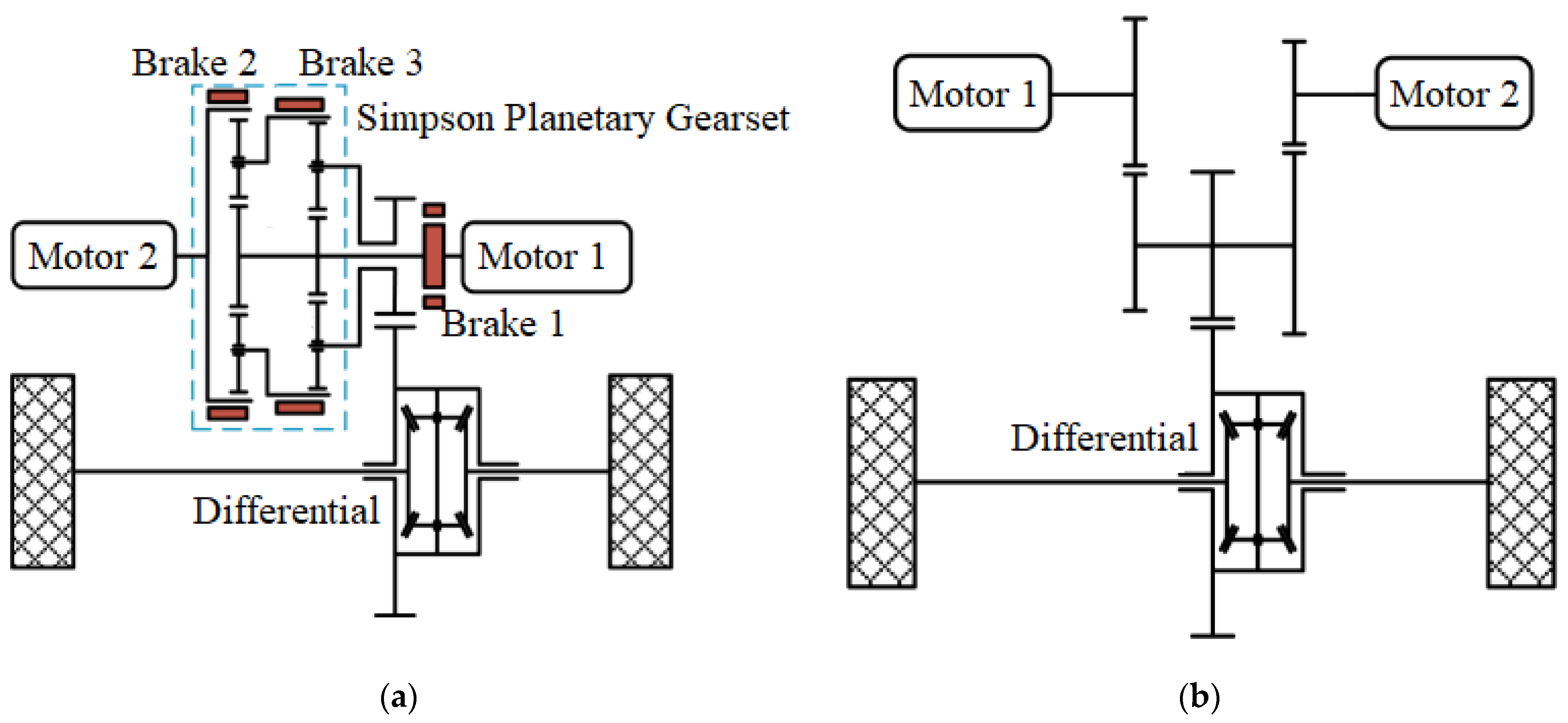
Next, in a latest work described by [
79], a two-motor configuration based on a Simpson planetary gearset was proposed in a two-motor EV powertrain configuration. Unlike the configuration described in [
78], this proposal provided two gear ratios in the powertrain, resulting in more flexibility for the driving modes. The Simpson planetary gearset consisted of two planetary gearsets with a brake for each set’s ring gear, and another brake was used at the first motor’s shaft. The ring gear of the first planetary gearset was connected to the second motor, and the ring gear of the second planetary gearset was connected to the first gearset’s planet carrier. The planet carrier of the second gearset, on the other hand, was connected to the wheels through a differential, while the sun gears of both planetary gearsets was connected to the first motor.
Figure 16 depicts the diagram of the Simpson planetary gearset configuration proposed in [
79], which was capable of providing six driving modes (two modes with two motors, and four modes with one motor). The two modes with two motors represented the possibility of torque coupling and speed coupling of the motors, and the four single-motor modes represented the power flow from the first and second motor through two-speed gear ratios. The powertrain configuration’s motor power and gear ratios were optimized using GA for minimum average efficiency in six driving cycles (LA92, JP1015, NEDC, WLTP and HWFET), high gradeability (40% at 10 km/h), high top speed (at least 190 km/h) and fast 0–100 km/h acceleration time (at around 10 s). The proposal was then compared with the typical parallel axle dual motor configuration with fixed gear ratio for evaluation. In terms of acceleration, the proposal provided faster 0–50 km/h acceleration time, but no significant difference was observed for the 0–100 km/h. For the average efficiency, the proposed Simpson planetary gearset configuration was more efficient than the typical parallel axle dual motor configuration by around 2.88 to 8.33% when employed in driving cycles with frequent acceleration and deceleration. However, in a driving cycle with relatively constant vehicle speed (like HWFET), the typical configuration was slightly more efficient by 0.45%, very likely due to the losses in the planetary gearsets. Moreover, the proposed configuration also required three actuators for the three brakes to properly control coupling between the two motors. In this aspect, advanced control algorithm for the actuators is crucial to ensure that they can be operated systematically not only for powertrain efficiency but also for driving comfort by minimizing the jerking during the driving mode shifting. Thus, in the future study, it is imperative to evaluate the workability and control of these actuators so that their performance in terms of powertrain efficiency, jerking and shifting time can be quantified and compared.
The subsequent work on multi-motor configuration is described in [
80], which like [
79], studied the possibility of applying an EV powertrain with a two motor configuration and a multispeed discrete transmission, in this case four speed AMT. The powertrain was applied in a city bus for a specific Nuremberg City Cycle and also for NYCC, where the focus was to optimize the driving strategy by properly coordinating the gearshifting. This was to avoid gear hunting, which not only affected the powertrain efficiency, but was also detrimental to the driving comfort. Next, in [
81], the objective was to determine and compare the performance of the configuration against single motor configuration with four-speed AMT. The study started by generating two optimized configurations of two-motors-four-speed-AMT EV powertrain, where the optimization objectives were to obtain minimum operating cost (defined as minimum total power consumption for the aforementioned driving cycle) and high driving performance (defined as the minimum acceleration time for 0–40 km/h). The control variables of the optimization were motor scale factor; expressed as the ratio of motor 1’s power divided by the power of motor 2, and the four gear ratios of the AMT. The optimum combinations of the variables to meet the optimization objectives were determined using NSGA-II. As a result, three powertrain configurations were finalized; Configuration 1 that consisted of one motor configuration and two optimized gear ratios, Configuration 2 that consisted of two motors configuration with the motor scale factor of 0.42 and four optimized gear ratios, and Configuration 3 that consisted of two motors configuration with the motor scale factor of 1.00 and four optimized gear ratios. All of them achieved the same acceleration time of 8.5 s, but in terms of power consumption, Configuration 1 recorded the worst at 7.48 kWh, while the second and third configurations managed to improve over the first one by 4.82% and 5.08%, respectively. Next, the optimum driving strategy was formulated for each configuration in terms of shifting schedule and motors coupling modes so that the driving efficiency and performance can be improved further. The simulation results of the three powertrain configurations plus the optimal driving strategy showed that, both Configurations 2 and 3 allowed the motors to operate with at least 85% efficiency rate for 65% of the driving cycle. As a comparison, in Configuration 1, the motor was allowed to operate at the same efficiency rate only for about 32% of the same driving cycle. Because of that, the total power consumptions obtained for Configurations 2 and 3 were lower than Configuration 1, at 7.219 kWh and 7.216 kWh, against 7.627 kWh, respectively. Nevertheless, it must be mentioned that in Configuration 1, the gear shifting occurred only 46 times during the cycle, which was significantly lower than 84 and 80 each for Configurations 2 and 3. These findings indicated that the one motor EV powertrain configuration with two-speed transmission is potentially advantageous in terms of overall cost (production, operation and maintenance costs) than those two motors configurations, even though it performed the worst in terms of efficiency. Not only that, the acceleration time was also the same for all configurations, and this reinforce Configuration 1 as the overall best choice as opposed to the other two. Therefore, further study on the operation cost can be carried out in the future by relating the data of the gearshifting frequency and the wear and tear of the shifting mechanism. Next, the shifting performance especially in terms of jerking must also be evaluated for all the configurations so that more aspects can be compared to determine the overall best configuration between the three. Other works describing the application of multi-motor configurations with multispeed transmission can also be read in [
82], which reviewed the methodologies of the multi-motor configurations, and [
83], which presented an optimization of gear ratios and torque distribution of two-motor EV powertrain configuration with two-speed transmission using a surrogated model developed based on an effective adaptive sampling method.
Apart from using two motors powertrain configurations, there were also other studies performed to evaluate the application of four motors in the EV powertrain. For instance, in [
84,
85], four motors were used with each of them assembled in the EV’s four wheels (
Figure 17). The main idea here was to split the weight distribution of the powertrain evenly to all wheels, thus enabling the increase of driving flexibility without the application of bigger motor and transmission. Each motor was also coupled to a two-speed AMT designed based on planetary gearset, where the appropriate gear ratio was actuated using DC motor and worm gear mechanism. In addition, the gear ratio actuator also featured ball-ramp self-energizing that consisted of translation plate with steel balls and spiral ramps. The purpose of this mechanism was to amplify the clutch engagement force during the gearshifting, resulting in the reduction of DC motor’s required power. To simulate the powertrain performance, the AMT’s gear ratios as well as its complete parameters were determined based on a transmission-equipped wheel hub motor described in [
86], while the gearshifting schedule was developed based on the vehicle speed and the throttle position. To simplify the simulation model, a dog clutch model was used as the surrogate model for the proposed gear ratio actuator. Two shifting approaches were applied—synchronous and asynchronous—where synchronous means that the gearshifting occurred simultaneously for the front and the rear wheels, while asynchronous means the gearshifting was done independently between the front and the rear wheels with a delay of 0.2 s. The key benefit lay in the asynchronous approach, which minimized the jerking thanks to the delay that reduced the torque interruption in the front wheels’ gearshifting by compensating it with the torque at the unshifted rear wheels (and vice versa). As a result, the jerking can be kept within the range of 4 m/s
3 to 6 m/s
3. However, the proposed powertrain configuration involved four independent two-speed AMT actuators, which means, although it was highly flexible in terms of gearshifting, it required sophisticated control logic to avoid too frequent shifting and gear hunting. Too frequent shifting and gear hunting, if not properly optimized, will cause driving discomfort and increased losses in the actuators.
The latest studies on four motors EV powertrain configuration focused on not only achieving optimum efficiency, but also enhancing driving safety and steering assist [
87,
88]. Unlike the powertrain configuration proposed in [
83,
84,
85], the four motors EV powertrain introduced in [
87,
88] lacked the gearshifting options since it used single speed transmission. However, the omission of gearshifting options increase its simplicity in terms of operation and controls. In [
87], the element of driving safety, together with the optimum efficiency in terms of power consumption, can be realized by implementing integrated motors’ torque vectoring control strategy in the wheels. The integrated strategy was intended to achieve multiple objectives such as reasonable traction torque distribution on the wheels for yaw stability control and steering assists, proper motor’s output torque to enable it to operate at its most efficient range for optimum power consumption, and reducing the wheels’ dynamic slip for driving stability as well as optimum power consumption. The proposed integrated strategy was then compared against the conventional axis distribution and maximization of stability margin strategies through simulation under WLTC, where the results showed that the integrated strategy reduced the wheels slip by 14.38% compared to the axis distribution strategy that led to the improved power consumption by 5.37%. The simulation results were then validated experimentally based on a single seat EV prototype that was driven at 60 km/h on a slippery road and then executing standard lane change maneuver. In the experiment, the wheels slip was reduced by 12.75% due to the implementation of the integrated torque vectoring control strategy as opposed to the axis distribution strategy. Meanwhile, in [
88], a fuzzy logic algorithm was applied in the traction distributions on the wheels. The algorithm was responsible to make sure that sufficient traction can be given to each of the wheels to achieve the desired vehicle speed during the driving, while also ensuring that the vehicle trajectory follows the desired driving path. Components of the powertrain used here were optimized using PSO for minimizing the weight of the battery and motors, minimizing drop in the battery’s SOC, and reducing driver steering efforts. With the optimized EV powertrain and the fuzzy logic algorithm for the wheels’ traction distribution, driver steering efforts can be reduced by 78.5% and the driving mileage can be increased even with the reduced size of the battery. The results obtained in [
87,
88] demonstrated the potentials of implementing independent motors for all wheels not only for efficiency but also for the vehicle handling that can possibly contribute in the vehicle safety and autonomous vehicle technologies. For the future scope, the work in [
87,
88] can be expanded to evaluate the proposed configuration’s performance in controlling the vehicle maneuvering against conventional traction control methods.
Summary of the reviewed literature on the multi-motor configurations for EV powertrain is presented in
Table 5. There are two common multi-motor configurations studied in the literature; the two motor configuration, and the four motor configuration. The objective of the two motor configuration is to allow the operation of one motor to be supported by the other motor through either torque coupling or speed coupling. As a result, the operation of these motors can be optimized for diverse driving conditions. The challenge, however, is to come up with the proper mechanism for the couplings, which typically involves multi clutches and brakes. The next challenge will be to effectively and systematically control these clutches and brakes through actuators so that the driving mode shifting can be executed smoothly and efficiently. Regarding the four motors configuration, the objective is to minimize the transmission power loss, since the motor is coupled directly to each wheel. Besides, the traction on the wheels can also be distributed independently, which can improve not only the power consumption, but also the driving stability and safety. Nevertheless, to achieve these, advanced control algorithm is required to integrate effectively the operation of the four motors at the wheels.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}