
Percussion-Based Pipeline Ponding Detection Using a Convolutional Neural Network


Abstract
:1. Introduction
2. Materials and Methods
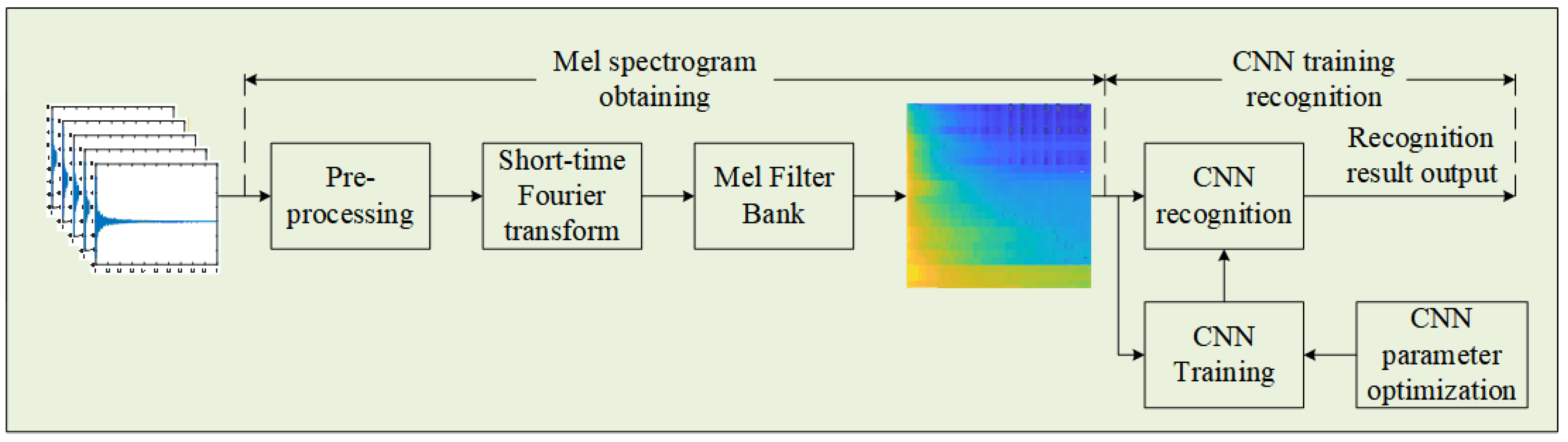
2.1. Working Principle
2.2. Mel Spectrogram
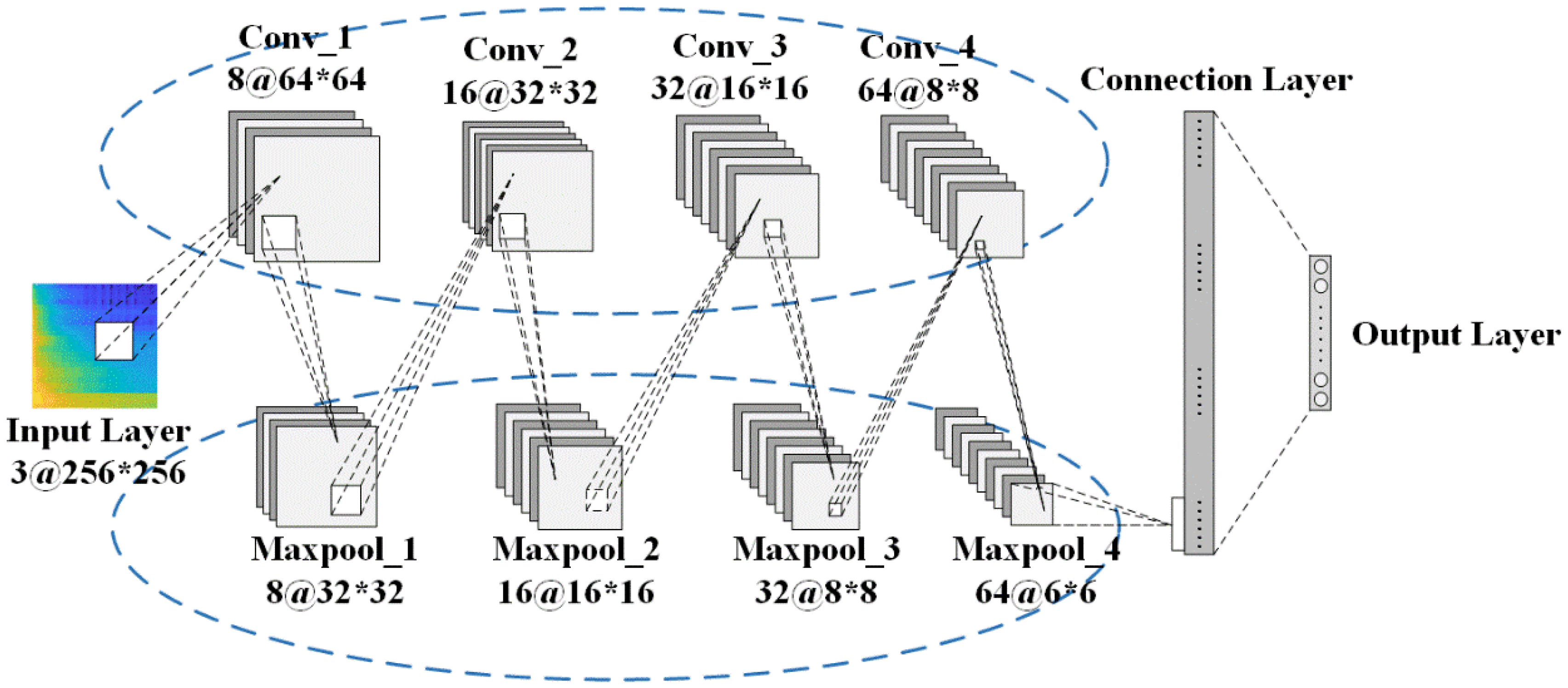
2.3. CNN
2.4. CNN Model Evaluation Metrics
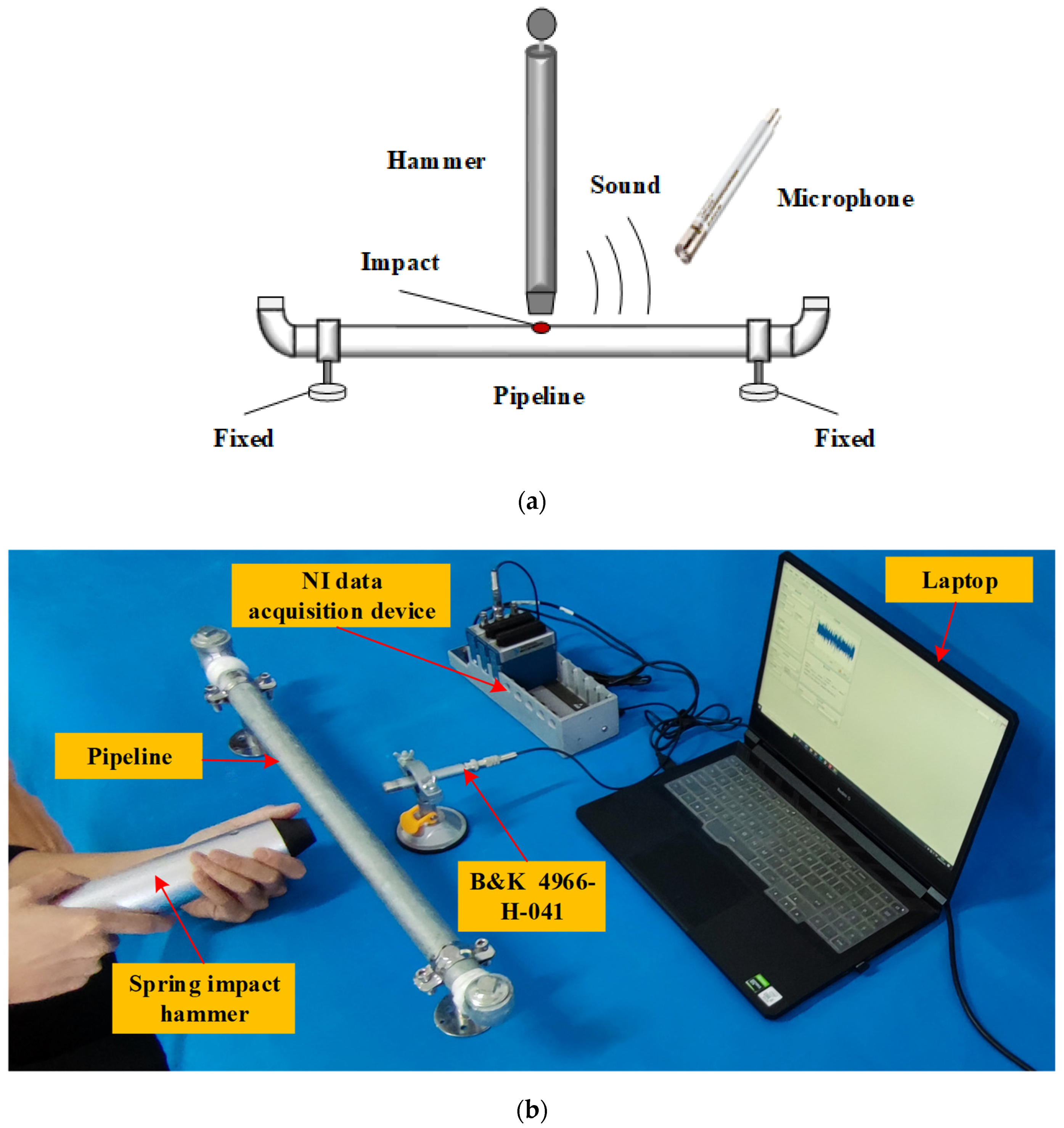
3. Experimental Setup and Procedures
4. Experimental Results
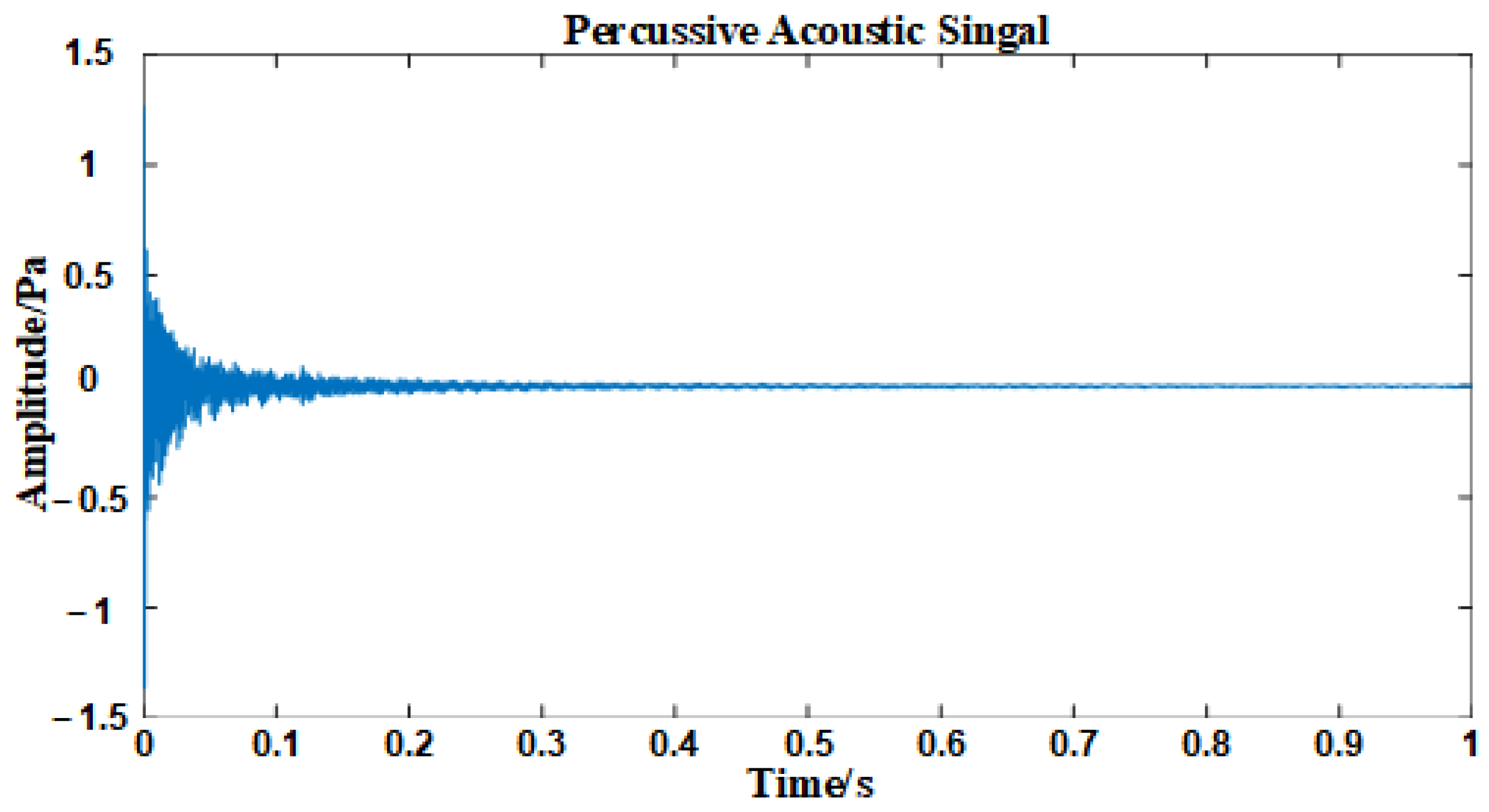
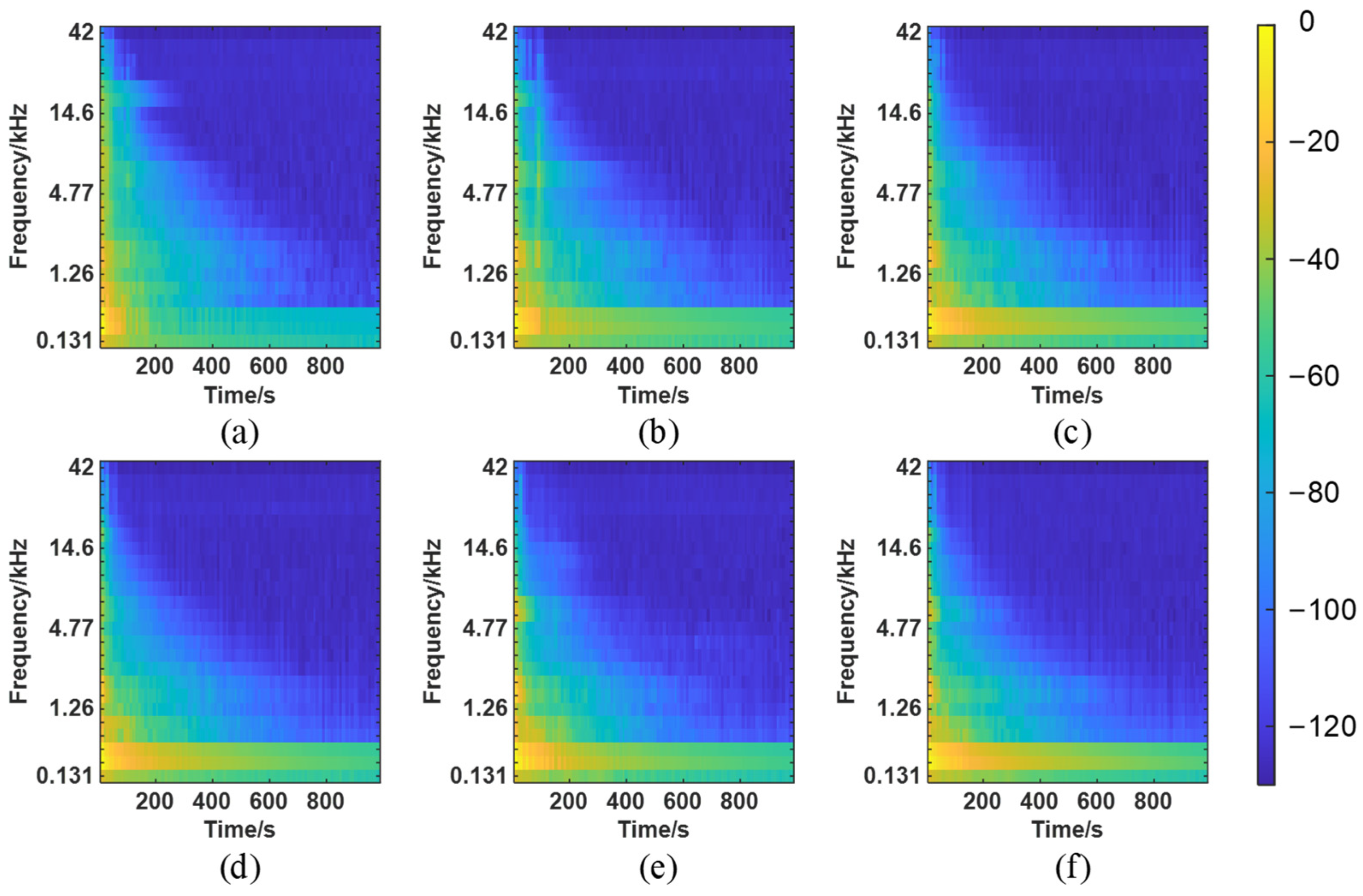
4.1. Mel-Feature Extraction
4.2. Identification of the Amount of Ponding Volume in a Single Pipeline
4.3. The CNN Model Evaluation of Ponding Volume in Different Pipelines
4.4. Comparison of Proposed CNN Model with Other Models
5. Conclusions
- The way of processing percussion-caused audio signal by converting to Mel spectrogram can be considered as a novel and cost-effective approach in detecting pipeline ponding volume. It presents a simple but very effective acoustic signal processing method;
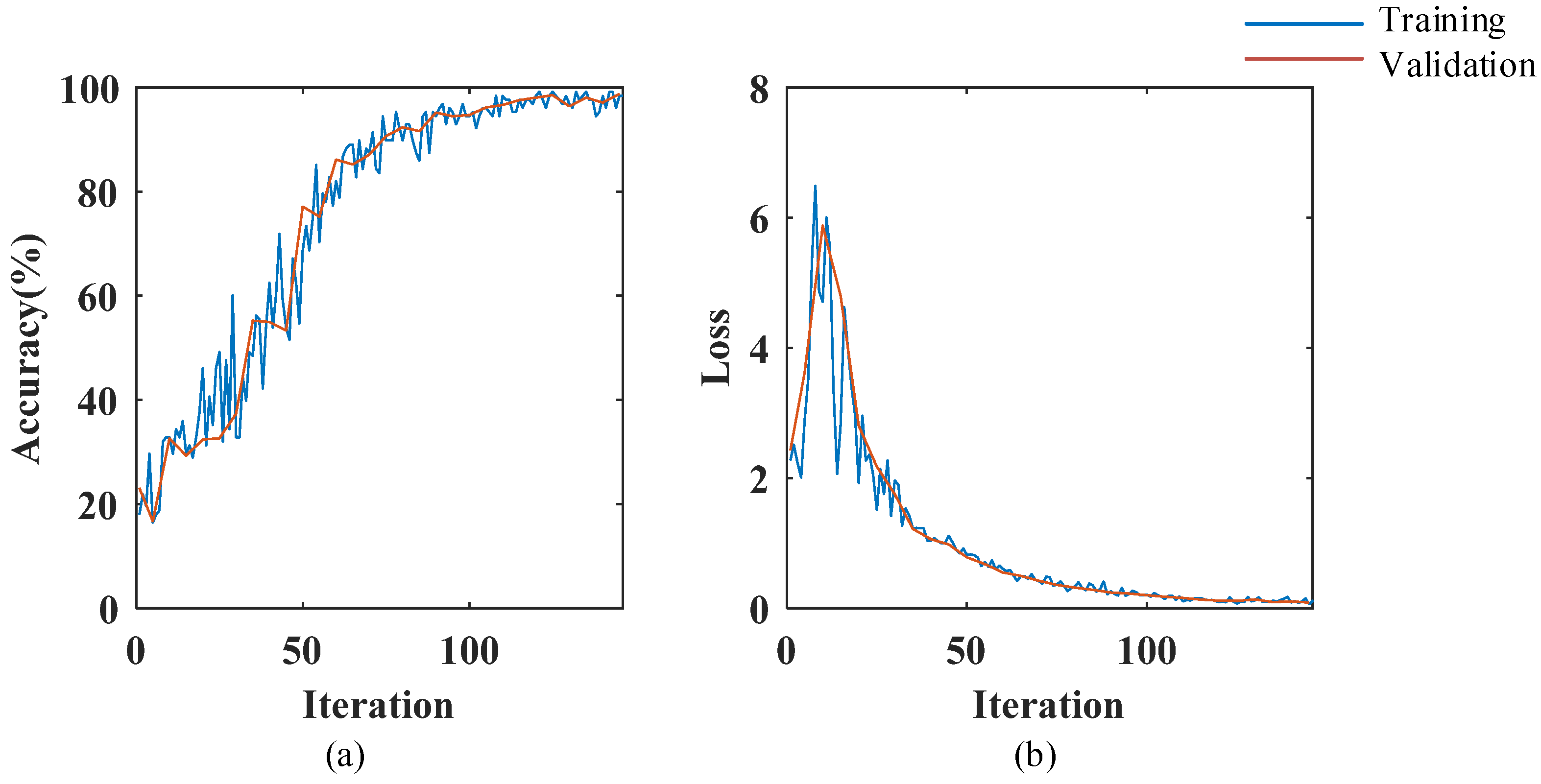
- The actual output of the CNN is basically consistent with the theoretical output during the proposed approach. The results demonstrate that the CNN recognition accuracy reaches 98.34% and can be effectively adopted to pipeline ponding detection;
- The proposed method is suitable for the detection of ponding volume in pipelines of different specifications, and the output performance of the six pipelines in the CNN models had an accuracy rate of 90.9–100%, a recall rate of 90–100%, and an F1-Measure of 94.7–100%;
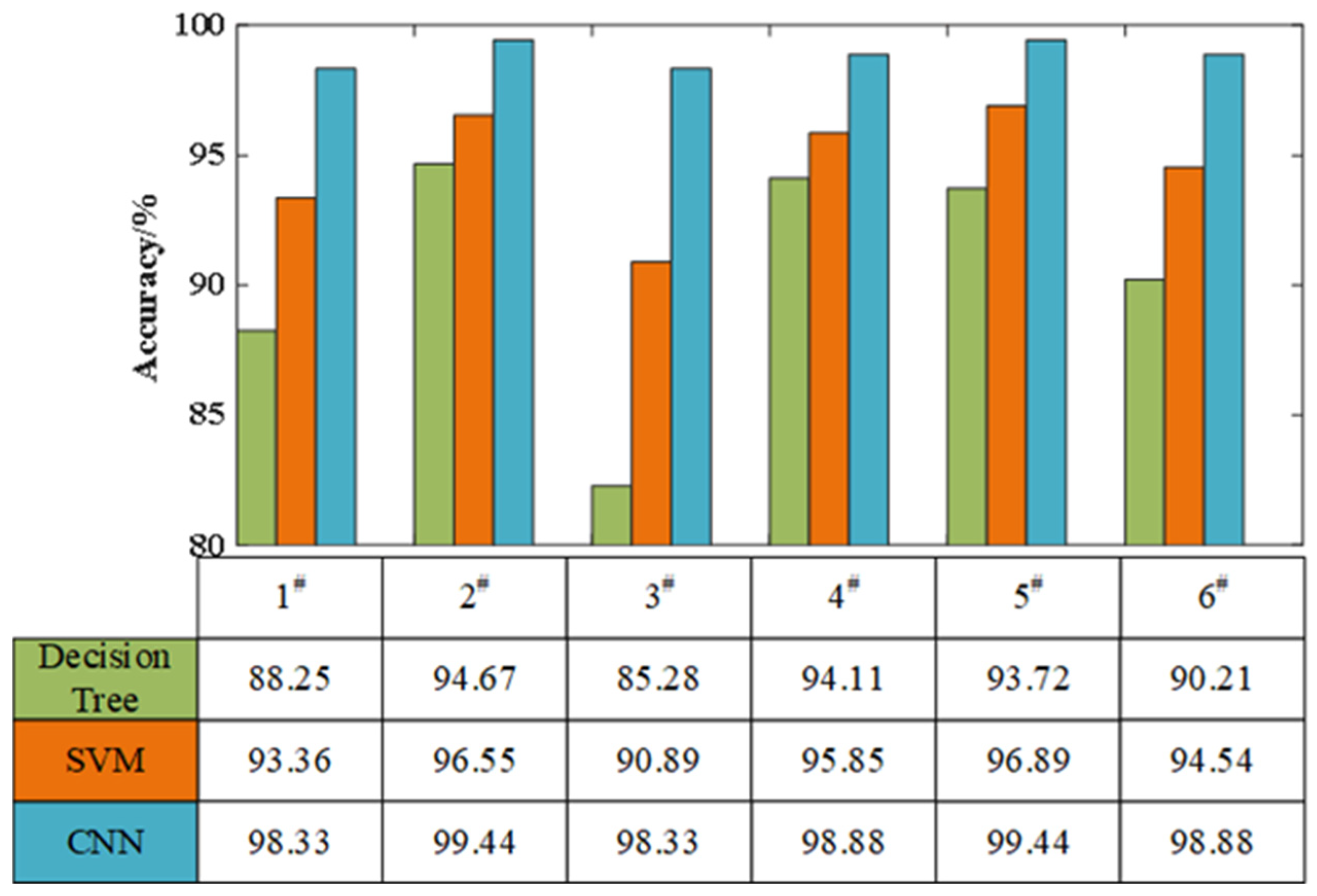
- The recognition accuracy of CNN falls between 98.33% and 99.44%, which indicates that this recognition model has a more stable and superior performance than the DTM recognition model and the SVM recognition model. Therefore, it can be concluded that the method combining the percussive detection method and the CNN proposed in this paper has better application prospects in pipeline ponding detection.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Wang, Z.; Liu, S.; Zhang, W.; Yu, J.; Sun, B. Prediction of hydrate deposition in pipelines to improve gas transportation efficiency and safety. Appl. Energy 2019, 253, 113521. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, P.; Wang, Y.; Tong, R.; Yu, B.; Qu, Z. Assessment method for gas supply reliability of natural gas pipeline networks considering failure and repair. J. Nat. Gas Sci. Eng. 2021, 88, 103817. [Google Scholar] [CrossRef]
- Huh, C.; Kang, S.G.; Cho, M.I.; Baek, J.H. Effect of Water and Nitrogen Impurities on CO2 Pipeline Transport for Geological Storage. Energy Procedia 2011, 4, 2214–2221. [Google Scholar] [CrossRef] [Green Version]
- Chae, M.; Jeong, H.D. Acceptance Sampling Plans for Pipeline Condition Assessment. J. Pipeline Syst. Eng. Pract. 2019, 10, 04019024. [Google Scholar] [CrossRef]
- Zeng, W.; Dang, X.; Li, S.; Wang, H.; Wang, H.; Wang, B. Application of non-contact magnetic corresponding on the detection for natural gas pipeline. E3S Web Conf. 2020, 185, 01090. [Google Scholar] [CrossRef]
- Licata, M.; Parker, H.M.O.; Aspinall, M.D.; Bandala, M.; Cave, F.; Conway, S.; Gerta, D.; Joyce, M.J. Fast neutron and γ-ray backscatter radiography for the characterization of corrosion-born defects in oil pipelines. Eur. Phys. J. Conf. 2020, 225, 06009. [Google Scholar] [CrossRef]
- Soltysik, R.C. CCTV Pipeline Inspection System Data Management System and Computer-Based Monitoring/Action Application. U.S. Patent 7916170, 29 March 2011. [Google Scholar]
- Khan, M.S. An acoustic based approach for mitigating sewer system overflows. In Proceedings of the Global Humanitarian Technology Conference, Seattle, DC, USA, 13–16 October 2016; pp. 782–789. [Google Scholar]
- Hemavathi, R.; Pushpalatha, B.A. Crack and Object Detection in Pipeline using Inspection Robot. J. Trend Sci. Res. Dev. 2018, 2, 1072–1077. [Google Scholar]
- Wang, T.; Wei, D.; Shao, J.; Li, Y.; Song, G. Structural Stress Monitoring Based on Piezoelectric Impedance Frequency Shift. J. Aerosp. Eng. 2018, 31, 04018092. [Google Scholar] [CrossRef]
- Mustapha, S. Ultrasonic method for Measuring transport parameters using only the reflected waves at the first interface of porous materials having a rigid frame. INTER—NOISE NOISE—CON Congr. Conf. Proc. 2016, 253, 7258–7263. [Google Scholar]
- Finger, C.; Saydak, L.; Vu, G.; Timothy, J.J.; Meschke, G.; Saenger, E.H. Sensitivity of Ultrasonic Coda Wave Interferometry to Material Damage—Observations from a Virtual Concrete Lab. Materials 2021, 14, 4033. [Google Scholar] [CrossRef]
- Zheng, G.; Tian, Y.; Zhao, W.; Jia, S.; He, N. Band-Stop Filtering Method of Combining Functions of Butterworth and Hann Windows to Ultrasonic Guided Wave. J. Pipeline Syst. Eng. Pract. 2022, 13, 04021076. [Google Scholar] [CrossRef]
- Yu, Y.; Safari, A.; Niu, X.; Drinkwater, B.; Horoshenkov, K.V. Acoustic and ultrasonic techniques for defect detection and condition monitoring in water and sewerage pipes: A review. Appl. Acoust. 2021, 183, 108282. [Google Scholar] [CrossRef]
- Saracino, G.; Ambrosino, F.; Bonechi, L.; Cimmino, L.; D’Alessandro, R.; D’Errico, M.; Noli, P.; Scognamiglio, L.; Strolin, P. Applications of muon absorption radiography to the fields of archaeology and civil engineering. Philos. Trans. Ser. A Math. Phys. Eng. Sci. 2018, 377, 20180057. [Google Scholar] [CrossRef] [Green Version]
- Yao, M.; Duvauchelle, P.; Kaftandjian, V.; Peterzol-Parmentier, A.; Schumm, A. Simulation of Computed Radiography X-ray Imaging Chain Dedicated to Complex Shape Objects. Eur. Conf. Non Destr. Test. 2014, 10, 6–10. [Google Scholar]
- Schulze, R.; Krummenauer, F.; Schalldach, F.; d’Hoedt, B. Precision and accuracy of measurements in digital panoramic radiography. Dento Maxillo Facial Radiol. 2000, 29, 52–56. [Google Scholar] [CrossRef]
- Ju, F.H.; Gong, X.B.; Jiang, L.B.; Hong, H.H.; Yang, J.C.; Xu, T.Z.; Chen, Y.; Wang, Z. Chronic myeloid leukaemia following repeated exposure to chest radiography and computed tomography in a patient with pneumothorax: A case report and literature review. Oncol. Lett. 2016, 11, 2398–2402. [Google Scholar] [CrossRef] [Green Version]
- Adams, R.D.; Cawley, P.; Pye, C.J.; Stone, B.J. A vibration technique for non-destructively assessing the integrity of structures. J. Mech. Eng. Sci. 1978, 20, 93–100. [Google Scholar] [CrossRef]
- Cawley, P.; Adams, R.D. The mechanics of the coin—tap method of nondestructive testing. J. Sound Vib. 1988, 122, 299–316. [Google Scholar] [CrossRef]
- Cawley, P.; Adams, R.D. Sensitivity of the coin—tap method of nonde-structive testing. Mater. Eval. 1989, 47, 558–563. [Google Scholar]
- Kong, Q.; Zhu, J.; Ho SC, M.; Song, G. Tapping and listening: A new approach to bolt looseness monitoring. Smart Mater. Struct. 2018, 27, 07LT02. [Google Scholar] [CrossRef]
- Adams, R.D. Vibration measurements in nondestructive testing. In Proceedings of the 3rd International Conference on Emerging Technologies in Non Destructive Testing, Thessaloniki, Greece, 26–28 May 2003; pp. 27–35. [Google Scholar]
- Wang, F.; Song, G. A novel percussion-based method for multi-bolt looseness detection using one-dimensional memory augmented convolutional long short-term memory networks. Mech. Syst. Signal Process. 2021, 161, 107955. [Google Scholar] [CrossRef]
- Wang, F.; Ho, S.; Song, G. Modeling and analysis of an impact-acoustic method for bolt looseness identification. Mech. Syst. Signal Processing 2019, 133, 106249. [Google Scholar] [CrossRef]
- Zheng, L.; Cheng, H.; Huo, L.; Song, G. Monitor concrete moisture level using percussion and machine learning. Constr. Build. Mater. 2019, 229, 117077. [Google Scholar] [CrossRef]
- Chen, D.; Montano, V.; Huo, L.; Fan, S.; Song, G. Detection of subsurface voids in concrete-filled steel tubular (CFST) structure using percussion approach. Constr. Build. Mater. 2020, 262, 119761. [Google Scholar] [CrossRef]
- Lall, A.; Scalzo, F.; Ullman, H.; Liebeskind, D.S.; Chien, A. Abstract P494: Automatically Predicting Modified Treatment in Cerebral Ischemia Scores From Patient Digital Subtraction Angiography Using Deep Learning. Stroke 2021, 52 (Suppl. 1), AP494. [Google Scholar] [CrossRef]
- Sharif Razavian, A.; Azizpour, H.; Sullivan, J.; Carlsson, S. CNN Features off-the-shelf: An Astounding Baseline for Recognition. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 806–813. [Google Scholar]
- Permana, S.D.H.; Saputra, G.; Arifitama, B.; Caesarendra, W.; Rahim, R. Classification of Bird Sounds as an Early Warning Method of Forest Fires using Convolutional Neural Network (CNN) Algorithm. J. King Saud Univ.—Comput. Inf. Sci. 2021; in press. [Google Scholar] [CrossRef]
- Hidayat, A.A.; Cenggoro, T.W.; Pardamean, B. Convolutional Neural Networks for Scops Owl Sound Classification. Procedia Comput. Sci. 2021, 179, 81–87. [Google Scholar] [CrossRef]
- Valtierra-Rodriguez, M.; Rivera-Guillen, J.R.; Basurto-Hurtado, J.A.; De-Santiago-Perez, J.J.; Granados-Lieberman, D.; Amezquita-Sanchez, J.P. Convolutional Neural Network and Motor Current Signature Analysis during the Transient State for Detection of Broken Rotor Bars in Induction Motors. Sensors 2020, 20, 3721. [Google Scholar] [CrossRef]
- Liu, F.; Shen, T.; Luo, Z.; Zhao, D.; Guo, S. Underwater target recognition using convolutional recurrent neural networks with 3-D Mel-spectrogram and data augmentation. Appl. Acoust. 2021, 178, 107989. [Google Scholar] [CrossRef]
- Xie, J.; Hu, K.; Guo, Y.; Zhu, Q.; Yu, J. On loss functions and CNNs for improved bioacoustic signal classification. Ecol. Inform. 2021, 64, 101331. [Google Scholar] [CrossRef]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al Dujaili, A.; Duan, Y.; Al Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al Amidie, M.; Farhan, L. Review of deep learning: Concepts, CNN architectures, challenges, applications, future directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef]
- Rodríguez-González, A.; Torres-Niño, J.; Valencia-Garcia, R.; Mayer, M.A.; Alor-Hernandez, G. Using experts feedback in clinical case resolution and arbitration as accuracy diagnosis methodology. Comput. Biol. Med. 2013, 43, 975–986. [Google Scholar] [CrossRef]
- Manochandar, S.; Punniyamoorthy, M. A new user similarity measure in a new prediction model for collaborative filtering. Appl. Intell. 2020, 5, 586–615. [Google Scholar] [CrossRef]
- Yan, L.; Zhong, B.; Ma, K.K. Confusion-Aware Convolutional Neural Network for Image Classification. In Proceedings of the International Conference on Neural Information Processing, Sydney, Australia, 12–15 December 2019. [Google Scholar]
- Jung, S.Y.; Liao, C.H.; Wu, Y.S.; Yuan, S.M.; Sun, C.T. Efficiently Classifying Lung Sounds through Depthwise Separable CNN Models with Fused STFT and MFCC Features. Diagnostics 2021, 11, 732. [Google Scholar] [CrossRef]
- Algermissen, S.; Hörnlein, M. Person Identification by Footstep Sound Using Convolutional Neural Networks. Appl. Mech. 2021, 2, 257–273. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A library for support vector machines. ACM Trans. Intel. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Cheng, H.; Wang, F.; Huo, L.; Song, G. Detection of sand deposition in pipeline using percussion, voice recognition, and support vector machine. Struct. Health Monit. 2020, 19, 2075–2090. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipeline Number | Outer Diameter/mm | Inner Diameter/mm | Length/mm |
|---|---|---|---|
| 1# | Φ32 | Φ25 | 60 |
| 2# | Φ32 | Φ25 | 100 |
| 3# | Φ42 | Φ35 | 60 |
| 4# | Φ42 | Φ35 | 100 |
| 5# | Φ48 | Φ41 | 60 |
| 6# | Φ48 | Φ41 | 100 |
| Name | Value | |||||
|---|---|---|---|---|---|---|
| Case | 0 | 1 | 2 | 3 | 4 | 5 |
| Water as a percentage of pipeline volume (%) | 0 | 10 | 20 | 30 | 40 | 50 |
| Name | Value |
|---|---|
| Fs/Hz | 100,000 |
| Window | Hamming |
| Window Length | 2048 |
| Overlap Length | 1024 |
| FFT Length | 4096 |
| NumBands | 24 |
| Name | Value | |||||
|---|---|---|---|---|---|---|
| Batch size | 5 | 10 | 15 | 20 | 25 | 30 |
| Accuracy (%) | 98.57 | 97.14 | 98.32 | 98.57 | 99.32 | 100 |
| Time/s | 529 | 267 | 170 | 131 | 104 | 94 |
| Batch size | 35 | 40 | 45 | 50 | 55 | 60 |
| Accuracy (%) | 98.73 | 93.10 | 91.67 | 84.76 | 86.19 | 83.24 |
| Time/s | 84 | 72 | 67 | 65 | 59 | 61 |
| Batch size | 65 | 70 | 75 | 80 | 85 | 90 |
| Accuracy (%) | 81.36 | 92.38 | 82.14 | 87.14 | 87.62 | 90.00 |
| Time/s | 54 | 55 | 48 | 49 | 41 | 42 |
| Batch size | 95 | 100 | ||||
| Accuracy (%) | 87.62 | 91.43 | ||||
| Time/s | 40 | 41 | ||||
| Name | Case | ||||
|---|---|---|---|---|---|
| Dataset split ratio | 1:1 | 3:2 | 7:3 | 4:1 | 9:1 |
| Accuracy (%) | 98.47 | 97.83 | 100 | 97.50 | 98.70 |
| Time/s | 86 | 92 | 81 | 97 | 129 |
| Target Class | |||||||
|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | ||
| Predicted Class | 0 | 29 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 30 | 0 | 0 | 0 | 0 | |
| 2 | 0 | 0 | 30 | 1 | 0 | 0 | |
| 3 | 0 | 0 | 0 | 29 | 0 | 0 | |
| 4 | 0 | 0 | 0 | 0 | 30 | 1 | |
| 5 | 0 | 0 | 0 | 0 | 0 | 29 | |
| Total accuracy (%) | 98.34 | ||||||
| 1#Pipeline | 2#Pipeline | 3#Pipeline | ||||||||
| R | P | F1 | R | P | F1 | R | P | F1 | ||
| Case | 0 | 96.7 | 100 | 98.3 | 100 | 96.8 | 98.4 | 100 | 100 | 100 |
| 1 | 100 | 96.8 | 98.4 | 100 | 100 | 100 | 100 | 90.5 | 95.2 | |
| 2 | 100 | 96.8 | 98.4 | 100 | 100 | 100 | 90 | 100 | 94.7 | |
| 3 | 96.7 | 100 | 98.3 | 100 | 100 | 100 | 100 | 100 | 100 | |
| 4 | 100 | 96.8 | 98.4 | 96.7 | 100 | 98.3 | 100 | 100 | 100 | |
| 5 | 96.7 | 100 | 98.3 | 100 | 100 | 100 | 100 | 100 | 100 | |
| 4#Pipeline | 5#Pipeline | 6#Pipeline | ||||||||
| R | P | F1 | R | P | F1 | R | P | F1 | ||
| Case | 0 | 100 | 96.8 | 98.4 | 100 | 100 | 100 | 100 | 100 | 100 |
| 1 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | |
| 2 | 96.7 | 100 | 98.3 | 100 | 100 | 100 | 100 | 100 | 100 | |
| 3 | 100 | 96.8 | 98.4 | 100 | 100 | 100 | 96.7 | 96.7 | 96.7 | |
| 4 | 100 | 100 | 100 | 96.7 | 100 | 98.3 | 96.7 | 100 | 98.3 | |
| 5 | 96.7 | 100 | 98.3 | 100 | 96.8 | 98.4 | 100 | 96.8 | 98.4 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Xiong, M.; Wang, T.; Lu, G. Percussion-Based Pipeline Ponding Detection Using a Convolutional Neural Network. Appl. Sci. 2022, 12, 2127. https://doi.org/10.3390/app12042127
Yang D, Xiong M, Wang T, Lu G. Percussion-Based Pipeline Ponding Detection Using a Convolutional Neural Network. Applied Sciences. 2022; 12(4):2127. https://doi.org/10.3390/app12042127
Chicago/Turabian StyleYang, Dan, Mengzhou Xiong, Tao Wang, and Guangtao Lu. 2022. "Percussion-Based Pipeline Ponding Detection Using a Convolutional Neural Network" Applied Sciences 12, no. 4: 2127. https://doi.org/10.3390/app12042127
APA StyleYang, D., Xiong, M., Wang, T., & Lu, G. (2022). Percussion-Based Pipeline Ponding Detection Using a Convolutional Neural Network. Applied Sciences, 12(4), 2127. https://doi.org/10.3390/app12042127